ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к роботу-пылесосу с внутренним, извлекаемым контейнером для пыли.
УРОВЕНЬ ТЕХНИКИ
Роботы-пылесосы (RVC) известны в области техники и обычно предназначены для самостоятельного перемещения, т.е., без наблюдения или направления человеком, по комнатам дома. Следовательно, наружная поверхность робота-пылесоса имеет особую важность. В конечном счете, любая выемка или выступ, которые образуют возможное место зацепления, могут заставить робот-пылесос зацепиться за что-либо, например, часть мебели, и застрять. Если в таком случае робот-пылесос не может отцепиться сам, он может быть освобожден вручную своим владельцем, прежде чем он сможет продолжить свою работу. Следовательно, необходимость в гладкой наружной форме является, прежде всего, вопросом работы, но следует отметить, что это также может находиться в соответствии с общим осуществлением красивой с эстетической точки зрения, «удобообтекаемой конструкции».
Наряду с этим, однако, робот-пылесос может быть оснащен внутренним, извлекаемым контейнером для пыли, который необходимо периодически опустошать. Для обеспечения извлечения контейнера для пыли из кожуха робота-пылесоса контейнер для пыли может содержать ручку или другой элемент для захвата рукой. Очевидным недостатком такого элемента является то, что он повышает риск того, что робот-пылесос может случайно запутаться во время работы. Этот риск может, по меньшей мере, в некоторых конструкциях быть уменьшен посредством выполнения элемента в разборной форме, например, шарнирной ручки контейнера для пыли, которая может складываться в соответствующую выемку в наружной стенке кожуха робота-пылесоса. К сожалению, такие решения почти никогда не являются удовлетворительными с эстетической точки зрения, в частности, поскольку они могут оставлять дополнительные и довольно заметные швы или канавки, исключительно связанные с техническими функциональными возможностями извлечения контейнера для пыли, на видимой наружной поверхности робота-пылесоса.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Целью настоящего изобретения является устранение или уменьшение вышеупомянутых недостатков и разработка решения, которое обеспечит конструкцию робота-пылесоса с легко извлекаемым контейнером для пыли с минимумом видимых снаружи элементов с функцией извлечения.
Для этой цели первый аспект настоящего изобретения относится к роботу-пылесосу. Робот-пылесос может содержать кожух, который образует приемное отделение для контейнера для пыли с приемным отверстием для контейнера для пыли, расположенным на наружной поверхности кожуха. Робот-пылесос может также содержать контейнер для пыли, выполненный для вмещения с возможностью извлечения внутри приемного отделения для контейнера для пыли через приемное отверстие для контейнера для пыли, так что в положении вмещения при работе наружная нажимная поверхность контейнера для пыли проходит заподлицо с наружной поверхностью кожуха, в то время как в положении вмещения с возможностью извлечения наружная поверхность контейнера для пыли выступает наружу за упомянутую наружную поверхность кожуха. Робот-пылесос может дополнительно содержать механизм двойного нажатия, который выполнен с возможностью удержания вмещенного контейнера для пыли в положении вмещения при работе при нажатии на наружную нажимную поверхность контейнера для пыли внутрь в кожух и отпускания первый раз, и для перемещения из положения вмещения при работе в положение вмещения с возможностью извлечения при нажатии внутрь в кожух и отпускания второй раз. То есть, механизм двойного нажатия может быть выполнен для альтернативного удержания вмещенного контейнера для пыли в положении вмещения при работе и положении вмещения с возможностью извлечения и обеспечения перемещения между этими положениями вмещения посредством нажатия на нажимную поверхность контейнера для пыли внутрь в кожух и затем ее отпускания.
Раскрываемый в настоящее время робот-пылесос, таким образом, может включать в себя извлекаемый контейнер для пыли, который во время работы может погружаться в приемное отделение для контейнера для пыли, обеспеченное в кожухе. В этом положении вмещения при работе наружная нажимная поверхность контейнера для пыли, которая может быть гладкой и, например, плоской, может располагаться заподлицо с наружной поверхностью кожуха, образующего приемное отверстие для контейнера для пыли. В предпочтительном варианте осуществления нажимная поверхность предпочтительно может закрывать, по существу, все отверстие, т.е. по меньшей мере 90% его площади, подобно крышке, чтобы спрятать отверстие от людских глаз. При необходимости извлечения контейнера для пыли из кожуха пользователь может нажать на его нажимную поверхность. После последующего отпускания механизм двойного нажатия может побудить контейнер для пыли к перемещению в его положение вмещения с возможностью извлечения, в котором его можно захватить рукой и удалить из кожуха. Соответственно, робот-пылесос обеспечивает извлекаемый контейнер для пыли без использования постоянно видимых или зацепляемых захватов и, таким образом, обеспечивает как функционально гладкую, так и красивую с эстетической точки зрения конструкцию.
Приемное отверстие для контейнера для пыли, по существу, может быть обеспечено на любой наружной поверхности кожуха, т.е., на его нижней поверхности или боковой поверхности. Однако, в предпочтительном варианте осуществления приемное отверстие для контейнера для пыли может быть обеспечено на верхней поверхности кожуха, т.е., поверхности, которая обращена вверх во время нормальной работы робота-пылесоса для обеспечения легкого и непосредственного доступа к нажимной поверхности, обычно заключенной внутри периферийной кромки отверстия.
Когда контейнер для пыли находится в своем положении вмещения с возможностью извлечения, он может захватываться пользователем и полностью извлекаться из приемного отделения для контейнера для пыли. Для обеспечения захвата контейнера контейнер для пыли и, в частности, ее нажимная поверхность, возможно должны выступать в достаточной степени за наружную поверхность кожуха, которая содержит приемное отверстие для контейнера для пыли. В предпочтительном варианте осуществления нажимная поверхность может выступать на по меньшей мере 5 мм и, более предпочтительно на по меньшей мере 10 мм от упомянутой наружной поверхности в положении вмещения с возможностью извлечения.
Кроме того, контейнер для пыли может образовывать периферийную область, которая в положении вмещения с возможностью извлечения проходит между периферийной кромкой нажимной поверхности контейнера для пыли и периферийной кромкой приемного отверстия для контейнера для пыли на наружной поверхности кожуха, причем периферийная область может образовывать улучшающий захват элемент поверхности. В одном варианте осуществления улучшающий захват элемент поверхности может включать в себя поверхность с большим коэффициентом трения или шероховатую (противоскользящую) поверхность, например, резиновую поверхность. В другом варианте осуществления улучшающий захват элемент поверхности может включать в себя по меньшей мере одно из выступа поверхности и выемки поверхности, такие как периферийная выемка или ребро. Преимущество последних элементов по сравнению с поверхностью с большим коэффициентом трения состоит в том, что они могут уменьшить риск того, что контейнер для пыли застрянет внутри приемного отверстия для контейнера для пыли вследствие трения между периферийной областью и внутренней стенкой приемного отделения для контейнера для пыли.
Специалист в данной области техники должен понимать, что механизм двойного нажатия робота-пылесоса может быть осуществлен разными способами. В типичном варианте осуществления механизм двойного нажатия может включать в себя по меньшей мере один исполнительный механизм двойного нажатия, т.е., устройство, которое в качестве альтернативы принимает вытянутую и сжатую конфигурацию при подвергании повторным внешним нажимам, которые обычно стремятся сжать устройство в определенном направлении. Исполнительные механизмы двойного нажатия сами по себе хорошо известны в области техники, например, в шариковых ручках, кухонных встроенных шкафах и гнездах для карты памяти в компьютерах, и их конструкция не будет описана в данном документе. Следует только отметить, что, по существу, может использоваться любой тип исполнительного механизма двойного нажатия, например, механический или электро(магнитный)-механический. В некоторых вариантах осуществления механизм двойного нажатия может дополнительно включать в себя механическую связь, которая может усиливать действие механизма двойного нажатия и/или передавать его действие в подходящую точку использования на контейнере для пыли.
Эти и другие признаки и преимущества настоящего изобретения будут более полно понятны из нижеследующего подробного описания конкретных вариантов осуществления настоящего изобретения вместе с сопроводительными чертежами, которые предназначены для иллюстрации, а не ограничения настоящего изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 - схематичный перспективный вид робота-пылесоса в соответствии с настоящим изобретением;
фиг. 2 - схематичный вид в разрезе сбоку робота-пылесоса, изображенного на фиг. 1, иллюстрирующий первый пример осуществления механизма для вмещения и извлечения контейнера для пыли;
фиг. 3 - схематичный вид в разрезе сбоку робота-пылесоса, подобный схематичному виду в разрезе сбоку робота-пылесоса изображенного на фиг. 1, иллюстрирующий второй пример осуществления механизма для вмещения и извлечения контейнера для пыли;
фиг. 4 - схематичный вид в разрезе сбоку робота-пылесоса, подобный схематичному виду в разрезе сбоку робота-пылесоса изображенного на фиг. 1, иллюстрирующий третий пример осуществления механизма для вмещения и извлечения контейнера для пыли.
ПОДРОБНОЕ ОПИСАНИЕ
Фиг. 1 - перспективный вид с частичным пространственным разделением элементов робота-пылесоса 1 в соответствии с настоящим изобретением, включающего в себя кожух 100 и извлекаемый контейнер 200 для пыли. За исключением случаев, когда рассматривается механизм для вмещения и извлечения контейнера для пыли, изображенный на фиг. 2, устройство 1 может иметь известную конструкцию, которая подробно не описана в данном документе.
Подобно наиболее известным роботам-пылесосам, например, кожух 100 робота-пылесоса может перемещаться на колесах и вмещать некоторые стандартные элементы, такие как электродвигатель, который функционально соединен с колесами кожуха, программируемый одноплатный компьютер, выполненный с возможностью осуществления перемещения, например, с помощью одного или более бортовых датчиков обнаружения препятствий и/или внешних маяков, и для принятия и обработки инструкций очистки, введенных пользователем, и перезаряжаемая батарея, которая питает как электродвигатель, так и одноплатный компьютер. Сам кожух 100 может иметь любую подходящую форму. В изображенном варианте осуществления, например, кожух 100 является обычно цилиндрическим, образующим верхнюю поверхность 102, нижнюю поверхность 104 и боковую поверхность 106, которая соединяет верхнюю и нижнюю поверхности.
Кожух 100 может образовывать приемное отделение 108 для контейнера для пыли, выполненное с возможностью вмещения с возможностью извлечения контейнера 200 для пыли. Для обеспечения вставки и извлечения контейнера 200 для пыли в/из отделения 108 наружная поверхность кожуха 100 может образовывать приемное отверстие 110 для контейнера для пыли, которое обеспечивает доступ к нему. В предпочтительном варианте осуществления приемное отверстие 110 для контейнера для пыли может быть, по меньшей мере, частично обеспечено на верхней поверхности 102 кожуха 100, т.е., поверхности, которая при использовании обращена вверх от очищаемого пылесосом пола. Такое расположение отверстия 110 может позволить пользователю всегда иметь удобный доступ и манипулировать контейнером 200 для пыли без необходимости удержания и/или подъема робота-пылесоса 1.
В дополнение к приемному отделению 108 для контейнера для пыли робот-пылесос 1 может включать в себя контейнер 200 для пыли, который выполнен для вмещения с возможностью извлечения в него через приемное отверстие 110 для контейнера для пыли. Контейнер 200 для пыли обычно может содержать корпус 202, который образует внутреннее пылесборное пространство 206, и крышку 204, которая закреплена необязательно с возможностью съема на корпусе 202 контейнера для пыли и выполнена для уплотнения с возможностью открытия внутреннего пылесборного пространства 206. Внешняя форма контейнера 200 для пыли обычно может дополнять внутреннюю форму приемного отделения 108 для контейнера для пыли, так что контейнер 200 для пыли может должным образом вмещаться внутрь. Как станет понятно ниже, зазор может быть необходим для предотвращения случайного застревания контейнера 200 для пыли и для обеспечения работы механизма 300 двойного нажатия, который выполняет функцию вмещения и извлечения контейнера для пыли.
Контейнер 200 для пыли может вмещаться в приемное отделение 108 для контейнера для пыли в по меньшей мере двух альтернативных положениях.
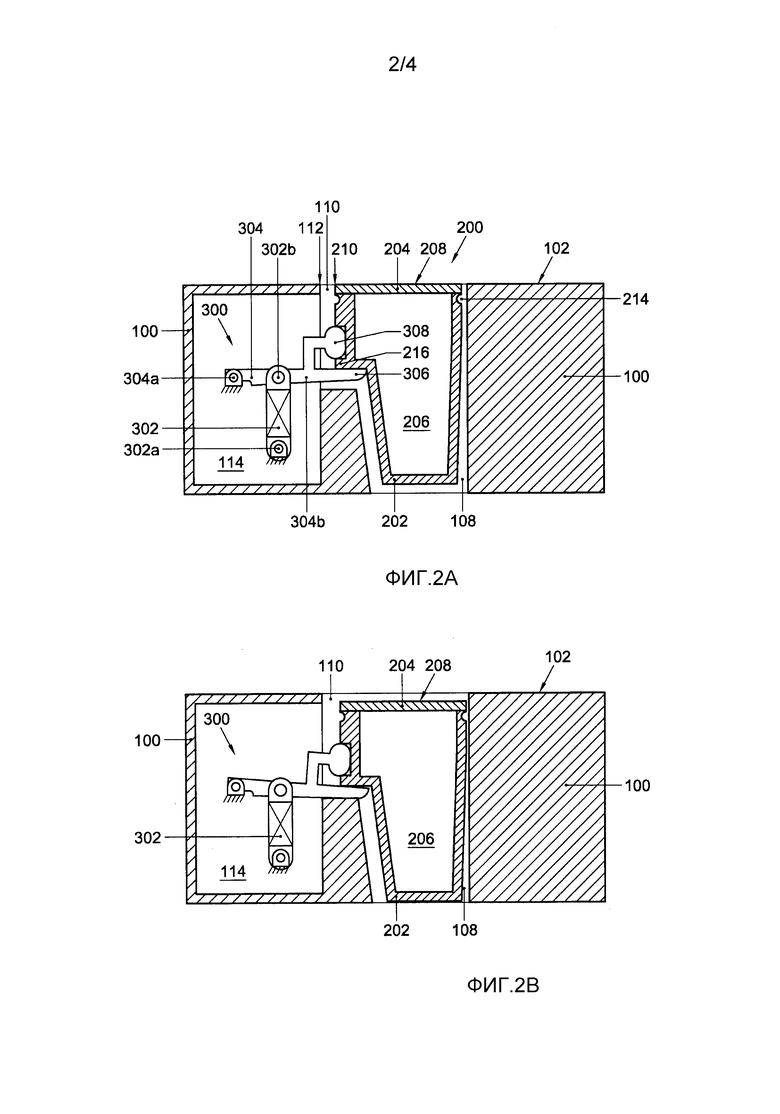
В первом положении, проиллюстрированном на фиг.2A и называемом положением вмещения при работе, контейнер 200 для пыли может полностью вмещаться внутрь приемного отделения 108 для контейнера для пыли, так что наружная поверхность 208 контейнера 200 для пыли, причем поверхность может называться «нажимной поверхностью» по причинам, которые будут объяснены ниже, проходит заподлицо с наружной поверхностью 102 кожуха 100. Нажимная поверхность 208 предпочтительно может иметь размер для прохождения через, по существу, все приемное отверстие 110 для контейнера для пыли, т.е., через, по меньшей мере, около 90% его площади, когда он занимает положение вмещения при работе, для эффективного закрытия отверстия и скрытия от людских глаз. Верхняя поверхность может только показывать узкий шов, где периферийные кромки 112, 210 приемного отверстия 110 для контейнера для пыли и нажимной поверхности 208 обращены друг к другу.
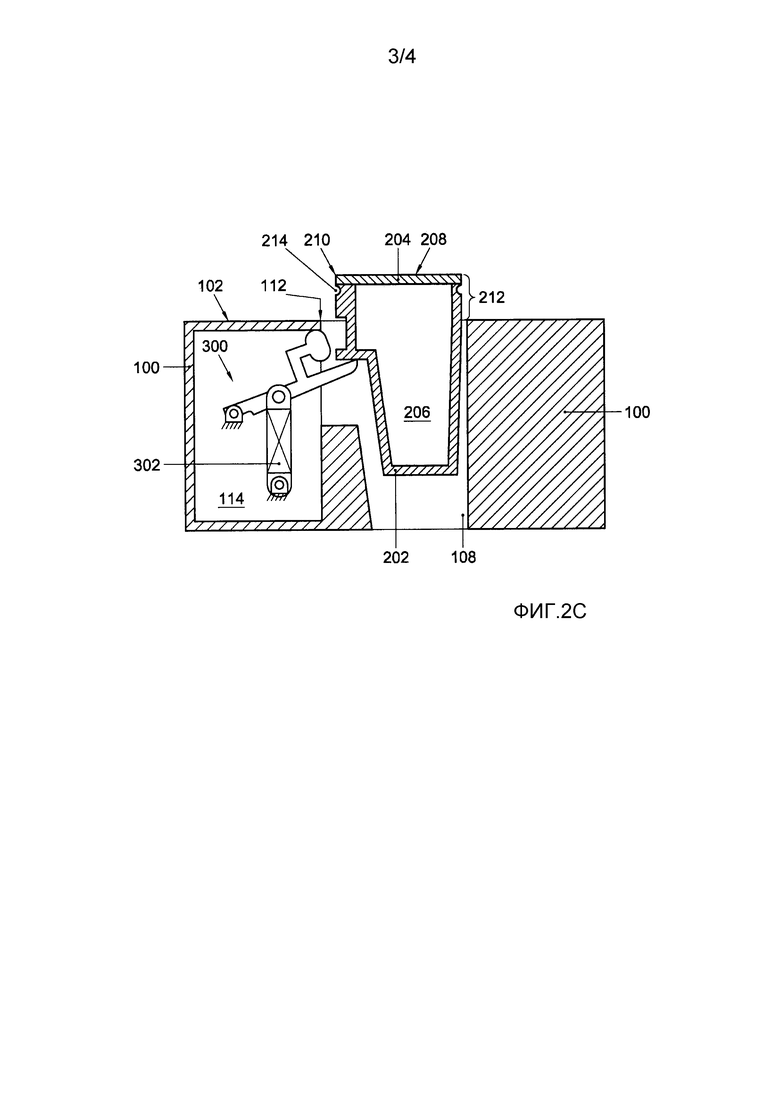
Во втором положении, проиллюстрированном на фиг. 2C и называемом положением вмещения с возможностью извлечения, контейнер 200 для пыли может только частично вмещаться внутрь приемного отделения 108 для контейнера для пыли, так что его нажимная поверхность 208 выступает наружу от наружной поверхности 102 кожуха 100. Понятно, что часть контейнера 200 для пыли, которая выступает от наружной поверхности 102 кожуха 100, может служить в качестве элемента, захватываемого рукой. Следовательно, в предпочтительном варианте осуществления нажимная поверхность может выступать на по меньшей мере 5 мм и, более предпочтительно, на 10 мм от наружной поверхности 102 кожуха 100 в положении вмещения с возможностью извлечения. Расстояния 5 мм и 10 мм, соответственно, могут быть измерены между, с одной стороны, периферийной кромкой 210 нажимной поверхности 208 контейнера 200 для пыли и, с другой стороны, периферийной кромкой 112 приемного отверстия 110 для контейнера для пыли в направлении, в котором контейнер 200 для пыли вставляется и извлекается из приемного отделения 108 для контейнера для пыли.
Для дополнительного обеспечения захвата контейнера 200 для пыли в его положении вмещения с возможностью извлечения может быть образована периферийная область 212, которая в положении вмещения с возможностью извлечения может проходить между периферийной кромкой 210 нажимной поверхности 208 контейнера 200 для пыли и периферийной кромкой 112 приемного отверстия 110 для контейнера для пыли на наружной поверхности 102 кожуха 100, и которая образует улучшающий захват элемент поверхности. В одном варианте осуществления улучшающий захват элемент поверхности может включать в себя поверхность с большим коэффициентом трения или шероховатую поверхность. В другом варианте осуществления улучшающий захват элемент поверхности может включать в себя по меньшей мере одно из выступа поверхности и выемки поверхности, например, периферийную выемку 214. Преимущество последних элементов по сравнению с поверхностью с большим коэффициентом трения состоит в том, что они могут уменьшить риск того, что контейнер 200 для пыли застрянет внутри приемного отделения 108 для контейнера для пыли вследствие трения между периферийной областью 212 и внутренней стенкой приемного отделения 108 для контейнера для пыли.
Робот-пылесос 1 может также включать в себя механизм 300 двойного нажатия, который может служить для удержания контейнера 200 для пыли в одном из положения вмещения при работе и положения вмещения с возможностью извлечения и давать возможность пользователю изменять положения посредством нажатия и отпускания нажимной поверхности 208 контейнера 200 для пыли. Более конкретно, механизм 300 двойного нажатия может быть выполнен с возможностью удержания вмещенного контейнера для пыли 200 в положении вмещения при работе, когда на нажимную поверхность 208 нажимают внутрь кожуха 100 и отпускают первый раз, и перемещения контейнера 200 для пыли из упомянутого положения вмещения при работе в положение вмещения с возможностью извлечения при нажатии внутрь кожуха 100 и отпускания второй раз.
В варианте осуществления на фиг. 1-2, механизм 300 двойного нажатия в значительной степени расположен внутри полости 114 в стенке приемного отделения 108 для контейнера для пыли, только части механизма, которые непосредственно взаимодействуют с контейнером 200 для пыли, выступают из полости 114 в отделение 108. Механизм 300 двойного нажатия может включать в себя исполнительный механизм 302 двойного нажатия, имеющий первый конец 302a, который неподвижно соединен с кожухом 100 робота-пылесоса, и второй конец 302b, который подвижен относительно первого конца 302a между по меньшей мере первой позицией, соответствующей положению вмещения при работе контейнера для пыли (см. фиг. 2A) и второй позицией, соответствующей положению вмещения с возможностью извлечения контейнера для пыли (см. фиг. 2C). Механизм 300 двойного нажатия может дополнительно включать в себя опорный рычаг или плечо 304, который выполнен с возможностью зацепления контейнера 200 для пыли для поддержания ее в обоих упомянутых положениях. Опорный рычаг 304 может проходить между первым концом 304a, который соединен с возможностью поворота с кожухом 100, и вторым концом 304b, который выполнен для зацепления с возможностью расцепления с контейнером 200 для пыли. Между его первым и вторым концами 304a, 304b опорный рычаг 304 может быть соединен с возможностью поворота со вторым подвижным концом 302b исполнительного механизма 302 двойного нажатия. На своем втором конце 304b опорный рычаг 304 может разветвляться таким образом, что он образует по меньшей мере два выступа 306, 308. В изображенном варианте осуществления один из выступов 306 является удлиненным, в то время как другой выступ 308 имеет обычно эллиптическую форму. Контейнер 200 для пыли может дополнительно образовывать участок 216 зацепления опорного рычага, который в положении вмещения при работе контейнера 200 зацепляется между упомянутыми по меньшей мере двумя выступами 306, 308 на конце 304b опорного рычага 304. В варианте осуществления на фиг. 2 участок 216 зацепления опорного рычага образован при помощи ребра, который отделяет выемку для вмещения эллиптического выступа 308 опорного рычага 304, и (перевернутого) выступа для примыкания к его удлиненному выступу 306.
В положении вмещения при работе на фиг. 2A участок 216 зацепления опорного рычага контейнера 200 для пыли вмещен между выступами 306, 308 на втором конце 304b опорного рычага 304, так что контейнер 200 для пыли по существу, зафиксирован на месте. Исполнительный механизм 302 двойного нажатия может быть выполнен с возможностью предотвращения (значительного) углового/вращательного движения опорного рычага 304 вокруг его первого вращающегося конца 304a под действием усилия, приложенного ко второму концу 304b, которое соответствует нагрузке, меньшей веса наполненного контейнера 200 для пыли. Соответственно, исполнительный механизм 302 двойного нажатия может удерживать контейнер 200 для пыли в его положении вмещения при работе, независимо от ориентации робота-пылесоса 1. То есть, он может удерживать контейнер 200 для пыли как в положении при нормальном использовании, как показано, так и в перевернутом положении, которое может возникнуть, когда пользователь решает вручную поднять и переместить робот-пылесос 1, например, для осмотра его нижней стороны. При этом, выступы 306, 308 опорного рычага 304 могут зацепляться с участком 216 зацепления опорного рычага довольно прочно для предотвращения его от дребезжания и вибрации во время использования.
Из фиг. 2A видно, что контейнер 200 для пыли не выступает из кожуха робота-пылесоса 1. Следовательно, пользователь не может захватить контейнер 200 для пыли для подъема и извлечения его из кожуха 100 робота-пылесоса. Для обеспечения такого извлечения пользователь может нажать или толкнуть нажимную поверхность 208 контейнера 200 для пыли внутрь кожуха, как показано на фиг. 2B и затем отпустить ее. Как упомянуто, усилие, необходимое для этой цели, может быть немного больше действия силы тяжести на заполненный пылью контейнер 200 для пыли. Опорный рычаг 304 может передавать нажатие на нажимную поверхность 208 исполнительному механизму 302 двойного нажатия для приведения его в действие или включения и заставлять его принимать вытянутую конфигурацию. Вытягивание исполнительного механизма 302 двойного нажатия может отдельно приводить в движение его первый и второй концы 302a, b, и, таким образом, приводить опорный рычаг 304 во вращение вокруг его первого конца 304a, таким образом, поднимая контейнер 200 для пыли, зацепленный на его втором конце 304b. Подъем может осуществляться, прежде всего, при помощи конца удлиненного выступа 306, который поддерживает опорный контакт с участком 216 зацепления опорного рычага за счет подъема, в то время как эллиптический выступ 308 может расцепляться с участком 216 зацепления опорного рычага во время подъема и, таким образом, освобождать контейнер для пыли для извлечения. Соответственно, в конце хода вытягивания исполнительного механизма 302 двойного нажатия контейнер 200 для пыли может находиться в положении вмещения с возможностью извлечения, изображенном на фиг. 2C.
Для приведения контейнера 200 для пыли обратно в его положение вмещения при работе пользователь может нажать на нажимную поверхность 208 в кожух 100 второй раз, как показано на фиг. 2B, и затем снова ее отпустить. Полученное в результате сжатие исполнительного механизма 302 двойного нажатия может привести его в действие еще раз и заставляет его повторно принимать его более короткое сжатое состояние после отпускания. Соответственно, отпускание нажимной поверхности 208 может повторно обеспечивать положение, изображенное на фиг. 2A.
Будет понятно, что вариант осуществления механизма вмещения и извлечения контейнера для пыли на основании механизма двойного нажатия может отличаться от других вариантов осуществления робота-пылесоса 1. В качестве примера две альтернативы варианту осуществления, изображенному на фиг. 2, будут описаны ниже со ссылкой на фиг. 3-4. На каждом из фиг. 3-4 проиллюстрирован вариант осуществления, в котором контейнер 200 для пыли находится в своем положении вмещения при работе. Отходя от этого положения вмещения при работе, положение вмещения с возможностью извлечения может быть осуществлено посредством нажатия на нажимную поверхность 208 контейнера 200 для пыли и затем отпускания ее, непосредственно как описано выше со ссылкой на фиг. 1-2.
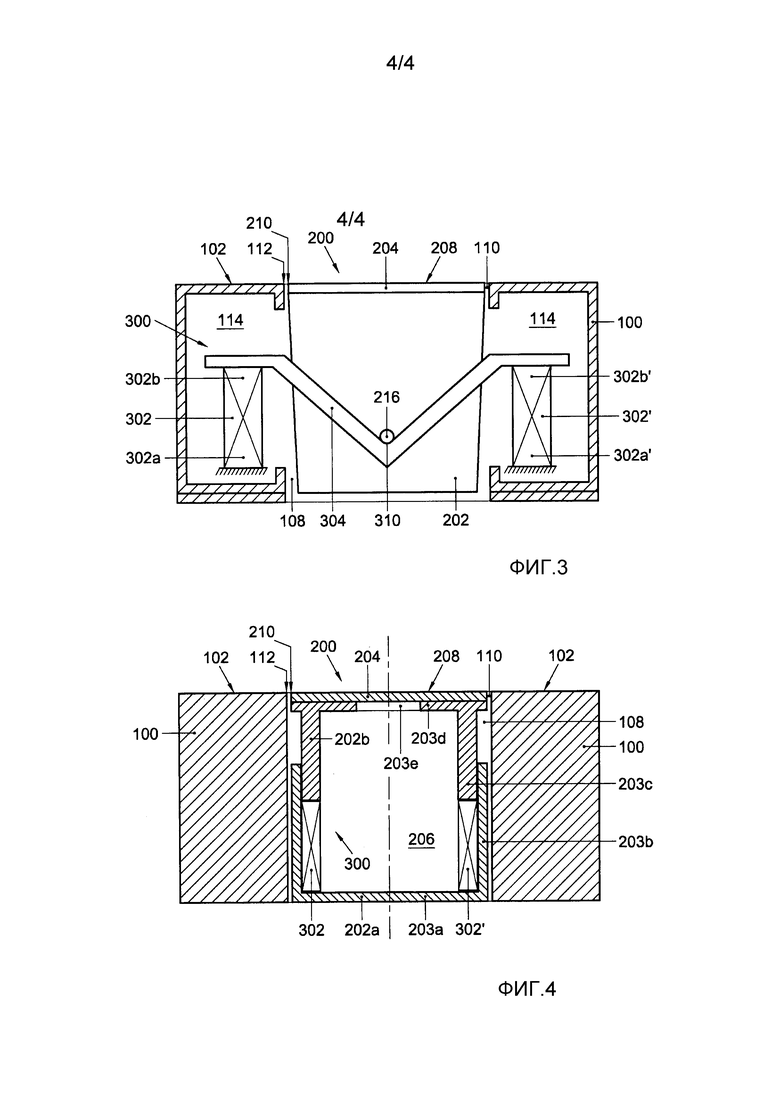
В варианте осуществления на фиг. 3 механизм 300 двойного нажатия может включать в себя по меньшей мере два расположенных на расстоянии друг от друга исполнительных механизма 302, 302’ двойного нажатия, каждый подобен исполнительному механизму двойного нажатия, описанному выше со ссылкой на вариант осуществления на фиг. 1-2. Механизм 300 двойного нажатия может дополнительно содержать по меньшей мере один опорный рычаг 304, который надежно соединяет пары вторых концов 302b, 302’ по меньшей мере двух исполнительных механизмов 302, 302’ двойного нажатия для синхронизации движений этих вторых концов. Хотя на фиг. 3 схематично проиллюстрирован вариант осуществления на виде в разрезе сбоку, на котором видны только два соединенных между собой исполнительных механизма 302, 302’ двойного нажатия, понятно, что контейнер 200 для пыли может, по существу, поддерживаться четырьмя исполнительными механизмами двойного нажатия. Эти четыре исполнительных механизма могут быть расположены на расстоянии друг от друга вокруг приемного отделения 108 для контейнера для пыли и соединены при помощи одной кольцевой рамы, которая образует четыре опорных рычага 304, которые вместе охватывают центральное отверстие для вмещения контейнера 200 для пыли. Соответственно, конфигурация на фиг. 3 может включать в себя четырехкратную симметрию относительно центральной вертикальной оси контейнера 200 для пыли, и фиг. 3 может рассматриваться как один из боковых видов четырех идентичных взаимно перпендикулярных сечений. Каждый опорный рычаг 304 может предпочтительно в точке приблизительно посередине между соответствующими соединенными вторыми концами 302, 302’ образовывать опорную поверхность, обращенную вверх для вмещения с возможностью поддержания или зацепления контейнера 200 для пыли. Контейнер 200 для пыли может дополнительно содержать одну или более опорных поверхностей, обращенных вниз. В изображенном варианте осуществления каждый опорный рычаг 304 образует перевернутую (т.е., направленную вниз) клинообразную часть, область вершины которой образует опорную поверхность 310, обращенную вверх. Соответствующая опорная поверхность, обращенная вниз, образована соответствующим участком 216 зацепления опорного рычага в виде штифта, который выступает от боковой стороны корпуса 202 контейнера для пыли. Клинообразная опорная поверхность 310 может вмещать с возможностью направления штифт 216 и устанавливать по центру контейнер 200 для пыли в приемном отделении 108 для контейнера для пыли. Общая симметрия конфигурации может предотвращать наклон контейнера 200 для пыли во время работы и, таким образом, способствует ее удержанию свободной от стенок приемного отделения 108 для контейнера для пыли. Однако, понятно, что другие варианты осуществления могут использовать только два соединенных между собой исполнительных механизма 302, 302’ двойного нажатия, обычно расположенных на противоположных сторонах контейнера 200 для пыли для предотвращения такого нежелательного наклона. В целом, вариант осуществления, имеющий меньшее количество соединенных между собой исполнительных механизмов двойного нажатия, может иметь меньший риск неодновременного приведения в действие всех исполнительных механизмов двойного нажатия и, следовательно, меньший риск нарушенной работы.
На фиг. 4 схематично проиллюстрирован третий пример осуществления механизма для вмещения и извлечения контейнера для пыли. Он отличается от вариантов осуществления, изображенных на фиг. 1-3 тем, что механизм 300 двойного нажатия полностью выполнен как одно целое с конструкцией контейнера 200 для пыли. Конкретно, корпус контейнера 200 для пыли может включать в себя первый участок 202a и второй участок 202b, причем участки могут образовывать вместе внутреннее пылесборное пространство 206. Первый участок 202a может, например, образовывать нижнюю стенку 203a и первую периферийную боковую стенку 203b пылесборного пространства 206, в то время как второй участок 202b может образовывать верхнюю стенку 203d и вторую периферийную боковую стенку 203c пылесборного пространства 206. Верхняя стенка 203d может образовывать отверстие 203e, которое обеспечивает доступ к пылесборному пространству 206, и крышка 208 контейнера для пыли может быть расположена на верхней стенке 203d для уплотнения с возможностью открытия этого отверстия. Первый и второй участки 202a, 202b контейнера 200 для пыли могут подвижно соединяться. Их первая и вторая боковые стенки 203b, c, например, могут соединяться впритык с возможностью скольжения друг с другом для обеспечения телескопического расширения пылесборного пространства 206 или, по меньшей мере, изменения наружного размера, например, высоты, контейнера 200 для пыли. Для регулирования изменяемого наружного размера первый и второй участки 202a, 202b корпуса контейнера для пыли могут соединяться механизмом 300 двойного нажатия, включающим в себя по меньшей мере один исполнительный механизм 302, 302’ двойного нажатия. По меньшей мере один исполнительный механизм 302, 302’ двойного нажатия может быть выполнен с возможностью обеспечения контейнера 200 для пыли двумя альтернативными высотами. Как видно в ситуации, в которой первый нижний участок 202a контейнера 200 для пыли полностью вмещен в приемное отделение 108 для контейнера для пыли, одна высота может заставить нажимную поверхность 208 контейнера для пыли располагаться заподлицо с верхней поверхностью 102 кожуха 100 робота-пылесоса, в то время как другая высота может заставить нажимную поверхность 208 проходить за верхнюю поверхность 102 кожуха 100 робота-пылесоса. Эти две альтернативные высоты могут, таким образом, соответствовать положению вмещения при работе и положению вмещения с возможностью извлечения контейнера для пыли, соответственно.
Хотя иллюстративные варианты осуществления настоящего изобретения были описаны выше отчасти со ссылкой на сопроводительные чертежи, следует понимать, что настоящее изобретение не ограничивается этими вариантами осуществления. Изменения в раскрытых вариантах осуществления могут быть понятны и осуществлены специалистами в данной области техники при осуществлении на практике заявленного изобретения путем изучения чертежей, раскрытия и прилагаемой формулы изобретения. Ссылка в этом описании на «один вариант осуществления» или «вариант осуществления» означает то, что конкретный элемент, конструкция или характеристика, описанные в связи с вариантом осуществления включены в по меньшей мере один вариант осуществления настоящего изобретения. Таким образом, появления фраз «в одном варианте осуществления» или «в варианте осуществления» в различных местах в данном описании, не обязательно все относятся к одному и тому же варианту осуществления. Кроме того, следует отметить, что конкретные элементы, конструкции или характеристики одного или более вариантов осуществления могут быть объединены любым подходящим способом для создания новых, не описанных явно вариантов осуществления.
СПИСОК ЭЛЕМЕНТОВ
1 - робот-пылесос (RVC)
100 - кожух
102 - верхняя поверхность кожуха
104 - нижняя поверхность кожуха
106 - боковая поверхность кожуха
108 - приемное отделение для контейнера для пыли
110 - приемное отверстие для контейнера для пыли
112 - периферийная кромка приемного отверстия для контейнера для пыли
114 -полость в боковой стенке приемного отделения для контейнера для пыли
200 - контейнер для пыли
202 - корпус контейнера для пыли
202a, b - первый (a) и второй (b) участок корпуса контейнера для пыли
203a - нижняя стенка
203b, c - первая (b) и вторая (c) периферийная боковая стенка
203d - верхняя стенка
203e - отверстие в верхней стенке
204 - крышка контейнера для пыли
206 - внутреннее пылесборное пространство
208 - нажимная поверхность
210 - периферийная кромка нажимной поверхности
212 - периферийная область
214 - периферийная выемка (в периферийной области)
216 - участок зацепления опорного рычага
300 - механизм двойного нажатия
302 - исполнительный механизм двойного нажатия
302a, b - первый (a) и второй (b) конец исполнительного механизма двойного нажатия
304 - опорный рычаг
304a, b - первый (a) и второй (b) конец опорного рычага
306 - нижний выступ на втором конце опорного рычага
308 - верхний выступ на втором конце опорного рычага
310 - опорная поверхность, обращенная вверх
| название | год | авторы | номер документа |
|---|---|---|---|
| ЧИСТЯЩЕЕ УСТРОЙСТВО | 2010 |
|
RU2534916C2 |
| СЕПАРАТОРНОЕ УСТРОЙСТВО И ПЫЛЕСОС | 2016 |
|
RU2712449C1 |
| ПЫЛЕСОС | 2007 |
|
RU2352242C2 |
| РОБОТ-ПЫЛЕСОС (ВАРИАНТЫ) | 2020 |
|
RU2793117C1 |
| ПЫЛЕСОС | 2016 |
|
RU2685882C1 |
| ПЫЛЕСОС ЦИЛИНДРИЧЕСКОГО ТИПА | 2010 |
|
RU2557743C2 |
| ЧИСТЯЩЕЕ УСТРОЙСТВО | 2010 |
|
RU2531263C2 |
| ЧИСТЯЩЕЕ УСТРОЙСТВО | 2010 |
|
RU2530795C2 |
| ГОЛОВКА ПЫЛЕСОСА | 2011 |
|
RU2543417C2 |
| РОБОТ-ПЫЛЕСОС | 2017 |
|
RU2710413C1 |

Изобретение относится к роботу-пылесосу, включающему в себя кожух, образующий приемное отделение для контейнера для пыли, которое имеет приемное отверстие для контейнера для пыли на наружной поверхности кожуха; контейнер для пыли, выполненный для вмещения с возможностью извлечения внутри приемного отделения для контейнера для пыли через отверстие для контейнера для пыли, так что в положении вмещения при работе наружная нажимная поверхность контейнера для пыли расположена заподлицо с наружной поверхностью кожуха, в то время как в положении вмещения с возможностью извлечения нажимная поверхность выступает наружу от упомянутой наружной поверхности кожуха; и механизм двойного нажатия, выполненный с возможностью удержания вмещенного контейнера для пыли в упомянутом положении вмещения при работе при нажатии на нажимную поверхность внутрь в кожух и отпускании первый раз, и перемещения контейнера для пыли из упомянутого положения вмещения при работе в положение вмещения с возможностью извлечения при нажатии внутрь и отпускании второй раз. Таким образом, обеспечивается упрощение выемки контейнера для пыли, без необходимости применения ручек или иных, например, шарнирных механизмов, усложняющих конструкцию устройства. 9 з.п. ф-лы, 6 ил.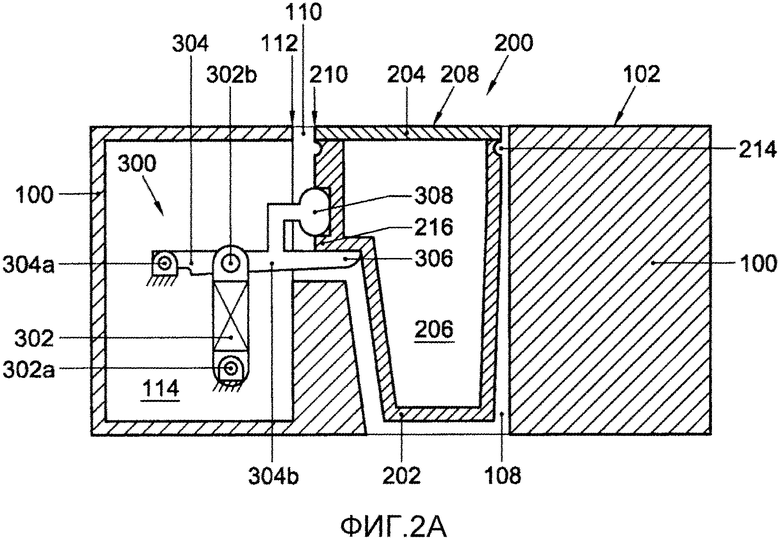
1. Робот-пылесос (1), включающий в себя:
кожух (100), образующий приемное отделение (108) для контейнера для пыли, которое имеет приемное отверстие (110) для контейнера для пыли на наружной поверхности (102) кожуха;
контейнер (200) для пыли, выполненный для вмещения с возможностью извлечения внутрь приемного отделения (108) для контейнера для пыли через приемное отверстие (110) для контейнера для пыли, так что
в положении вмещения при работе наружная нажимная поверхность (208) контейнера для пыли расположена заподлицо с наружной поверхностью (102) кожуха, в то время как
в положении вмещения с возможностью извлечения нажимная поверхность (208) контейнера для пыли выступает наружу от упомянутой наружной поверхности (102) кожуха; и
механизм (300) двойного нажатия, который выполнен с возможностью удержания вмещенного контейнера (200) для пыли в упомянутом положении вмещения при работе при нажатии на нажимную поверхность (208) контейнера для пыли внутрь в кожух (100) и отпускании первый раз и перемещения контейнера для пыли из упомянутого положения вмещения при работе в положение вмещения с возможностью извлечения при нажатии внутрь в кожух и отпускании второй раз.
2. Робот-пылесос по п. 1, в котором верхняя поверхность (102) кожуха (100) образует наружную поверхность кожуха, на которой обеспечено приемное отверстие (110) для контейнера для пыли.
3. Робот-пылесос по п. 1 или 2, в котором нажимная поверхность (208) контейнера (200) для пыли выступает на по меньшей мере 5 мм наружу от упомянутой наружной поверхности (102) кожуха в упомянутом положении вмещения с возможностью извлечения.
4. Робот-пылесос по п. 1 или 2, в котором контейнер (200) для пыли образует периферийную область (212), которая в упомянутом положении вмещения с возможностью извлечения проходит
между периферийной кромкой (210) нажимной поверхности (208) контейнера для пыли и периферийной кромкой (112) приемного отверстия (110) для контейнера для пыли на наружной поверхности (102) кожуха (100), и
при этом упомянутая периферийная область (212) образует улучшающий захват элемент поверхности, включающий в себя по меньшей мере одно из выступа поверхности и выемки (214) поверхности.
5. Робот-пылесос по п. 1 или 2, в котором в положении вмещения при работе нажимная поверхность (208) контейнера (200) для пыли закрывает, по существу, все приемное отверстие (110) для контейнера для пыли.
6. Робот-пылесос по п. 1 или 2, в котором механизм (300) двойного нажатия включает в себя:
первый исполнительный механизм (302) двойного нажатия, имеющий первый конец (302a), который неподвижно соединен с кожухом (100), и второй конец (302b), который является подвижным относительно первого конца между первой позицией и второй позицией; и
опорный рычаг (304), который соединен со вторым концом (302b) первого исполнительного механизма (302) двойного нажатия, так что опорный рычаг выполнен с возможностью удержания контейнера (200) для пыли в положении вмещения при работе, когда второй конец (302b) исполнительного механизма (302) двойного нажатия находится в первой позиции, и опорный рычаг выполнен с возможностью удержания контейнера для пыли в положении вмещения с возможностью извлечения, когда второй конец первого исполнительного механизма двойного нажатия находится во второй позиции.
7. Робот-пылесос по п. 6, в котором опорный рычаг (304) проходит между первым концом (304a), который соединен с возможностью поворота с кожухом (100), и вторым концом (304b), который выполнен с возможностью зацепления с контейнером (200) для пыли, и
при этом второй конец (304b) первого исполнительного механизма (302) двойного нажатия соединен с возможностью поворота с опорным рычагом (304) между его первым и вторым концами (304a, 304b).
8. Робот-пылесос по п. 7, в котором второй конец (304b) опорного рычага разветвлен, так что он образует по меньшей мере два выступа (306, 308), и
при этом контейнер (200) для пыли образует участок (216) зацепления опорного рычага, который в положении вмещения при работе контейнера зацеплен между упомянутыми по меньшей мере двумя выступами (306, 308).
9. Робот-пылесос по п. 6, в котором механизм (300) двойного нажатия дополнительно включает в себя:
второй исполнительный механизм (302’) двойного нажатия, расположенный на расстоянии от первого исполнительного механизма (302) двойного нажатия и имеющий первый конец (302a’), который неподвижно соединен с кожухом, и второй конец (302b’), который является подвижным относительно первого конца между первой и второй позицией;
при этом опорный рычаг (304) соединен со вторыми концами (304b, 304b’) первого и второго исполнительных механизмов (302, 302’) двойного нажатия для синхронизации действий упомянутых исполнительных механизмов, и
при этом опорный рычаг (304) зацепляется с вмещенным контейнером (200) для пыли в точке (310) между вторыми концами (304b, 304b’) первого и второго исполнительных механизмов (302, 302’) двойного нажатия.
10. Робот-пылесос по п. 1 или 2, в котором контейнер (200) для пыли включает в себя первый участок (202a) и второй участок (202b), причем упомянутые участки подвижно соединены между собой при помощи механизма (300) двойного нажатия, так что наружный размер контейнера для пыли изменяется за счет нажатия на нажимную поверхность (208) вмещенного контейнера (200) для пыли внутрь в кожух (100) и затем отпускания ее.
| БИОПРЕПАРАТ ДЛЯ ОЧИСТКИ МОРСКОЙ ВОДЫ ОТ НЕФТИ | 2008 |
|
RU2404139C2 |
| ПЫЛЕСБОРНИК И ЭЛЕКТРИЧЕСКИЙ ПЫЛЕСОС | 2004 |
|
RU2327412C2 |
| УСТРОЙСТВО ДЛЯ УСТАНОВКИ ФИЛЬТРА В ПЫЛЕСОСЕ | 2001 |
|
RU2210971C1 |
| US 2006242787 A1, 02.11.2006. | |||

