ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение, в общем, относится к сетям беспроводной связи. В частности, изобретение относится к способу для индикации физического изменения внешней части модуля узла сети, включенного в узел сети в сети беспроводной связи, такому модулю узла сети и такому узлу сети.
УРОВЕНЬ ТЕХНИКИ
Размер сетей связи с точки зрения числа узлов, которые они включают в себя, быстро рос в последние годы. Одним типом сетей связи, где эта тенденция особенно сильна, является сотовая сеть.
Одна из причин этого роста состоит в уменьшении размера некоторых узлов сети, таких как базовые станции. Базовые станции в настоящее время могут быть довольно маленькими и покрывать небольшую площадь. Это обеспечивает большую гибкость в сетях, но также и предъявляет к ним высокие требования.
Когда число узлов увеличивается, трудно отслеживать, что в конкретном узле было сделано изменение.
Одной областью, где изменение узла может быть проблемой, является область идентификации узла.
В сети связи существует необходимость давать каждому узлу уникальный идентификатор/адрес, чтобы обеспечить возможность индивидуальной связи с каждым блоком. Существует несколько способов достижения этого автоматическим образом.
В некоторых системах существует также необходимость точно идентифицировать, где модуль, который формирует этот узел, расположен, или, другими словами, идентификационная информация блока должна содержать информацию о местоположении, а не только уникальный адрес узла. Одним примером такой системы является система радиодоступа, состоящая из многих базовых радиостанций (RBS), где местоположения RBS должны быть известны для радиочастотного (RF) планирования сети.
Сеть радиодоступа может быть построена со многими различными типами RBS, от Макро до Пико/Фемто типов. Важным для Макро-типов является то, что они немногочисленны и расположены на больших расстояниях друг от друга. Другой важным аспектом Макро RBS является то, что она содержит много сменных модулей, и что она соединена с внешней антенной. Эти типы RBS часто требуют квалифицированных полевых операторов для установки и пусконаладочных работ.
Важным для сетей с Пико/Фемто RBS является то, что они могут состоять из большого числа узлов, размещенных близко друг к другу, и каждая RBS может содержать один сменный модуль, включающий в себя антенну.
В Макро сети "квалифицированные полевые операторы" могут настраивать RBS с использованием необходимой информации о размещении, нужной для идентификации.
В Пико/Фемто сети доступа число полевых операторов ограничено относительно числа узлов. Кроме того, сетевым операторам может быть не позволено обслуживать некоторые узлы, особенно фемто узлы, так как они могут быть частной собственностью заказчика. Это означает, что процесс обработки идентифицирующей информации о местоположении должен быть упрощенным и надежным. Кроме того, может быть убрана, например, вся RBS, таким образом, после удаления на этом месте не остается ничего, что может нести идентифицирующую информацию о местоположении. Это означает, что идентифицирующая информация о местоположении может быть утеряна. Из-за ограниченного числа полевых операторов, обслуживающего персонала и проблем доступа может быть трудно обеспечить идентифицирующую информацию о местоположении для нового или измененного узла.
Есть также другие случаи, когда изменения узлов должны быть зарегистрированы, например, если было какое-либо вмешательство в узел.
Таким образом, может иметься несколько изменений узла, и эти изменения должны быть надлежащим образом обработаны. Таким образом, существует потребность в регистрации изменений, сделанных по отношению к узлам сети.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Таким образом, изобретение направлено на регистрацию физических изменений, произведенных в узле сети.
Одной задачей изобретения, таким образом, является обнаружение физических изменений, сделанных во внешней части модуля узла сети.
Эта задача, в соответствии с первым аспектом изобретения, решается с помощью модуля узла сети, входящего в состав узла сети беспроводной связи, причем модуль узла сети содержит:
детектор перемещения, который обнаруживает перемещение между первым и вторым стыковочным элементом, и модуль узла сети, содержит первый стыковочный элемент, и оба стыковочных элемента необходимы для того, чтобы получить действующий узел сети, и
блок управления, который генерирует индикацию физического изменения модуля узла сети на основании обнаруженного перемещения.
Задача, в соответствии со вторым аспектом изобретения, решается с помощью узла сети в сети беспроводной связи, причем узел сети содержит по меньшей мере один модуль узла сети. Здесь модуль узла сети в свою очередь содержит:
детектор перемещения, который обнаруживает перемещение между первым и вторым стыковочным элементом, причем модуль узла сети содержит первый стыковочный элемент, и оба элемента необходимы для того, чтобы получить действующий узел сети, и
блок управления, который генерирует индикацию физического изменения модуля узла сети на основании обнаруженного перемещения.
Вышеупомянутая задача, в соответствии с третьим аспектом изобретения, решается с помощью способа для индикации физического изменения внешней части модуля узла сети, входящего в состав узла сети в сети беспроводной связи. Здесь способ содержит:
обнаружение перемещения между первым и вторым стыковочным элементом, причем модуль узла сети содержит первый стыковочный элемент, и оба стыковочных элемента необходимы для того, чтобы получить действующий узел сети, и
генерацию индикации физического изменения внешней части модуля узла сети на основании обнаруженного перемещения.
Изобретение имеет много преимуществ. Оно упрощает обнаружение того, имело ли место изменение физической внешней части модуля в узле или нет. Это упрощает обработку ситуации и может, например, предотвратить ситуацию, что модуль неправильно идентифицирован как не замененный, как перемещенный в другое местоположение.
Модуль узла сети может содержать память модуля, которая сбрасывается на основании обнаруженного перемещения.
Способ может аналогично содержать сброс конфигурации модуля узла сети на основании обнаружения перемещения. Этот сброс может быть сбросом памяти модуля на основании обнаружения перемещения.
Блок управления модуля узла сети может дополнительно запустить процедуру обработки индикации на основании сгенерированной индикации. Это может включать в себя отправку индикации физического изменения устройству обработки индикации через блок связи.
Следовательно, способ может также содержать инициирование процедуры обработки индикации на основании сгенерированной индикации, причем процедура обработки индикации может содержать отправку индикации физического изменения устройству обработки индикации.
Устройство обработки индикации может быть устройством генерации положения, а блок управления, в ходе выполнения процедуры обработки индикации, может принять новые данные о местоположении от устройства генерации местоположения. Устройство обработки индикации может дополнительно быть другим узлом сети в сети беспроводной связи, а блок управления может тогда, в ходе выполнения процедуры обработки индикации, получить новую конфигурацию от этого другого узла сети через блок связи. Новая конфигурация может содержать новые данные о местоположении.
Блок управления может дополнительно принимать идентификатор сети от другого узла сети в ходе выполнения процедуры обработки индикации.
Блок управления может также выполнять по меньшей мере одну меру безопасности на основании сгенерированной индикации. Процедура обработки индикации может также содержать процедуру обработки лицензии на программное обеспечение.
Блок управления может дополнительно отправлять сигнал индикации неисправности на основании обнаруженного перемещения. Модуль узла сети может в этом случае также содержать счетчик, который может изменять значение на основании обнаруженного перемещения. Сигнал индикации неисправности можно тогда отправляться, только если счетчик имеет значение, переходящее порог неисправности.
Модуль узла сети может дополнительно быть первым модулем узла сети в наборе модулей узла сети, входящих в состав узла сети. В этом случае детектор перемещения может обнаружить подключение или отключение первого модуля узла сети к или от объединительной платы, к которой уже подключены по меньшей мере некоторые из других модулей узла сети в наборе. В этом случае каждый из других модулей узла сети будет содержать идентичные данные о местоположении, и блок управления будет тогда принимать данные о местоположении от по меньшей мере одного из упомянутых других подключенных модулей.
Детектор перемещения может также быть механическим и содержать стержень, шестерню, имеющую много положений шестерни, каждое из которых имеет соответствующий считываемый паттерн, и средство считывания паттерна. Стержень может тогда входить в зацепление с шестерней и приводиться в движение посредством перемещения между первым стыковочным элементом и вторым стыковочным элементом. Это в свою очередь вызывает перемещение шестерни в новое положение шестерни. Средство считывания паттерна здесь считывает паттерн и предоставляет его блоку управления. В этой ситуации блок управления исследует текущий и предыдущий паттерн и генерирует индикацию на основании разницы.
Первый и второй стыковочные элементы могут дополнительно быть элементами разъема питания, а детектор перемещения может быть электрическим. В этом случае детектор перемещения может содержать переключатель, который изменяет положение переключателя и, таким образом, генерирует индикацию, когда есть перемещение между первым стыковочным элементом и вторым стыковочным элементом. Детектор перемещения может тогда также содержать компоновку деления напряжения, которая различает ситуации подачи питания в результате перемещения между первым и вторыми стыковочными элементами и другими ситуациями подачи питания.
Первый стыковочный элемент может быть штекерным элементом, в то время как второй стыковочный элемент может быть соответствующим розеточным элементом. Также возможно, что первый стыковочный элемент является розеточным элементом, а второй стыковочный элемент является соответствующим штекерным элементом.
Модуль узла сети может также содержать блок позиционирования, который получает местоположение узла сети, запускаемое сгенерированной индикацией.
Наконец, модуль узла сети может быть модулем базовой станции, а узел сети может быть базовой станцией в сети беспроводной связи.
Следует подчеркнуть, что термин "содержит/содержащий" при использовании в этом описании используется для того, чтобы указать присутствие заявленных свойств, систем, этапов или компонентов, но это не исключает наличия или добавления одного или более других свойств, систем, этапов, компонентов или их групп.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Теперь будет более подробно описано изобретение со ссылкой на прилагаемые чертежи, на которых:
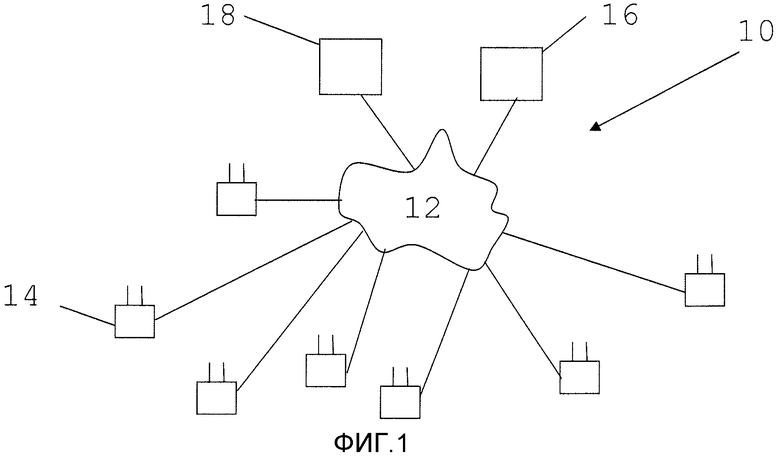
фиг. 1 схематично показывает сеть связи, содержащую ряд базовых станций, осуществляющих связь с дополнительными узлами сети через транспортную сеть,
фиг. 2 показывает блок-схему первого варианта модуля узла сети, который формирует весь первый узел сети,
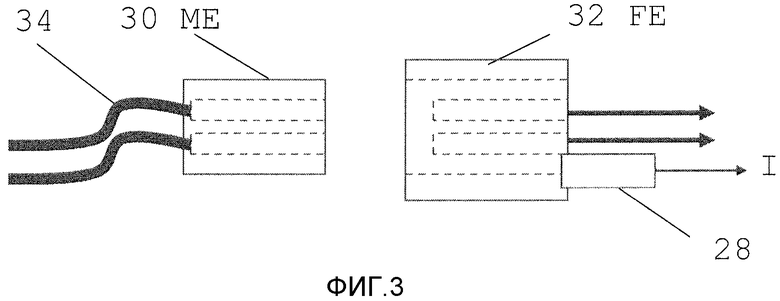
фиг. 3 схематично показывает штекерный и розеточный элемент соединителя, используемый при обнаружении физических изменений модуля узла сети,
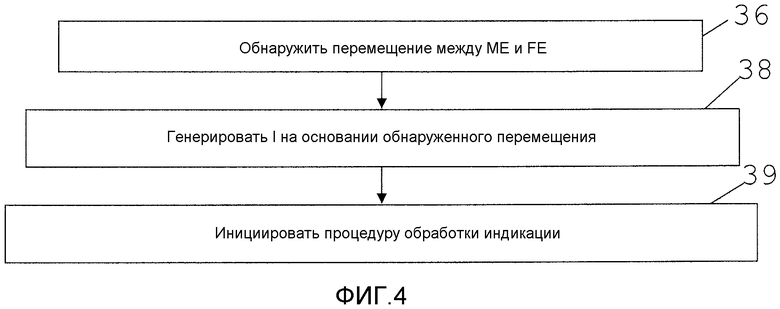
фиг. 4 показывает схему последовательности операций общего способа для индикации физического изменения внешней части первого модуля узла сети,
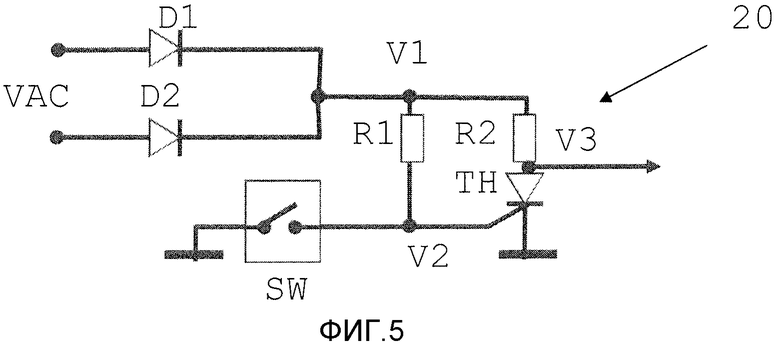
фиг. 5 показывает электрическую схему первого варианта детектора перемещения, используемого в модуле узла сети,
фиг. 6 показывает напряжения, ассоциированные с работой первого варианта детектора перемещения в первом варианте использования,
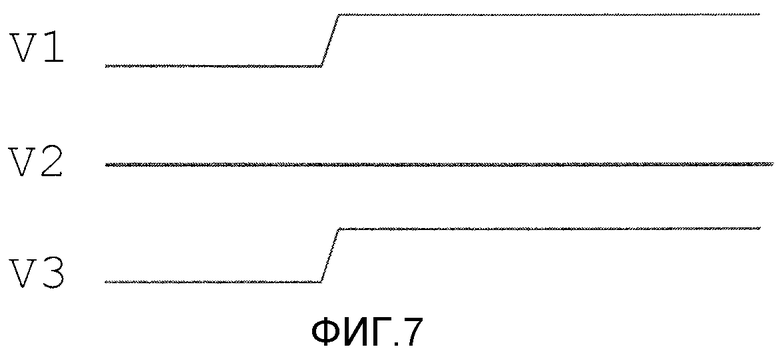
фиг. 7 показывает напряжения, ассоциированные с работой первого варианта детектора перемещения во втором варианте использования,
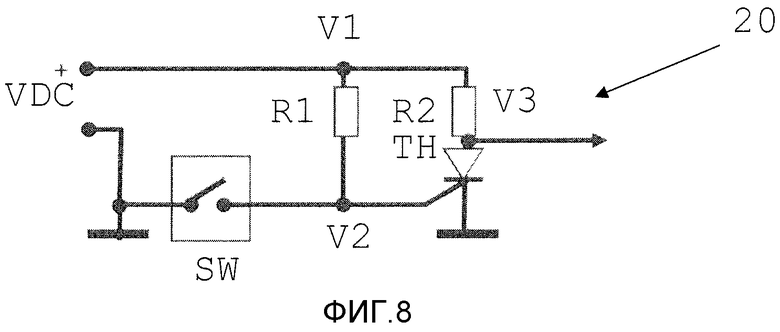
фиг. 8 показывает электрическую схему второго варианта детектора перемещения,
фиг. 9 показывает схематический чертеж третьего варианта детектора перемещения, используемого в модуле узла сети,
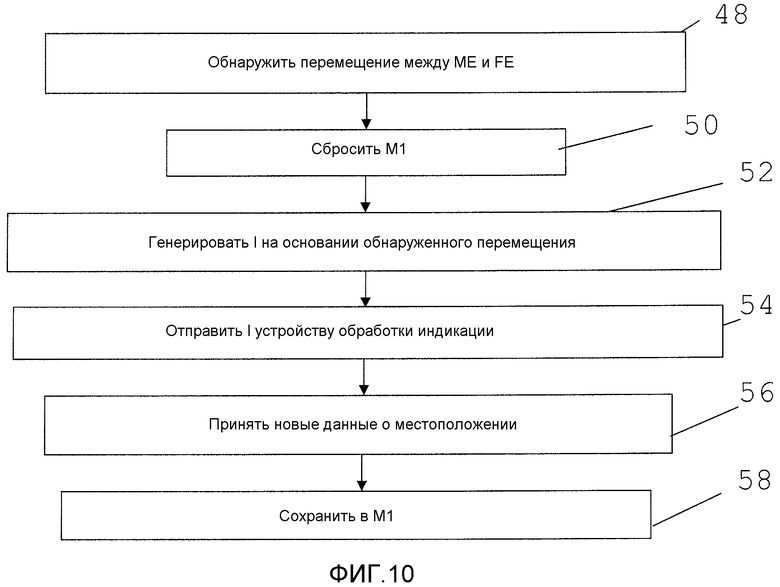
фиг. 10 показывает схему последовательности операций способа для индикации физического изменения внешней части модуля узла сети в соответствии с предпочтительным вариантом осуществления изобретения,
фиг. 11 показывает блок-схему второго варианта модуля узла сети, и
фиг. 12 схематично показывает шину объединяющей платы для подключения к нескольким модулям вместе с модулем узла сети в соответствии со вторым вариантом модуля узла сети, и
фиг. 13 показывает схему последовательности операций другого варианта способа для индикации физического изменения внешней части модуля узла сети.
ПОДРОБНОЕ ОПИСАНИЕ
В нижеследующем описании для целей пояснения, а не ограничения, изложены конкретные детали, такие как конкретная архитектура, интерфейсы, методы и т.д. для обеспечения полного понимания изобретения. Однако, для специалистов в области техники будет очевидно, что изобретение может быть реализовано в виде других вариантов осуществления, которые отступают от этих конкретных деталей. В других случаях пропущены подробные описания известных устройств, схем и способов, чтобы не загромождать описание изобретения ненужными подробностями.
Настоящее изобретение относится к узлу сети в сети беспроводной связи.
Здесь сеть беспроводной связи может быть сетью связи, такой как сеть стандарта проекта долгосрочного развития (LTE), Универсальной системы мобильной связи (UMTS) или Глобальной системы мобильной связи (GSM). Это лишь несколько примеров сетей, где может быть реализовано изобретение, и следует понимать, что изобретение может также быть реализовано в других типах сетей, таких как Беспроводные локальные сети (WLAN). Таким образом, сеть связи может быть сетью сотовой связи, а узел сети может быть базовой станцией. Один пример одной такой сети связи схематично показан на фиг. 1.
Иллюстративная сеть 10 связи содержит ряд базовых станций, где первая базовая станция 14 является базовой станцией, образующей узел 19 сети, использующей индикацию физических изменений в соответствии с принципами изобретения. Кроме того, базовые станции соединены с транспортной сетью 12, через которую они могут осуществлять связь друг с другом, а также с другими узлами сети. Здесь эти другие узлы сети включают в себя первое устройство и устройство обработки индикации 16 и 18. Устройство обработки индикации может, например, быть узлом сети, таким как узел эксплуатации и техобслуживания (O&M). Для простоты здесь показаны только два таких узла.
Фиг. 2 показывает блок-схему первого варианта модуля 19 базовой станции. Модуль входит в состав узла сети, образуемого базовой станцией. В этом примере модуль 19 также образует целую базовую станцию 14 в сети связи. Показанный здесь модуль базовой станции 19 содержит объект 28 для обнаружения физических изменений. Этот объект 28 для обнаружения физических изменений содержит детектор 20 перемещения, первую память M1 22, блок управления CTU 24 и блок связи COU 26. Здесь детектор 20 перемещения соединен с первой памятью 22, которая в свою очередь соединена с блоком 24 управления. Первая память 22 является здесь модульной памятью. Наконец, блок 24 управления соединен с блоком 26 связи.
Здесь следует понимать, что модуль 19 узла сети может включать в себя много блоков и функций других типов, таких как радиосхема, модулятор, демодулятор, усилитель, антенна и т.д. Однако здесь они были опущены, чтобы обеспечить более ясное описание изобретения. Кроме того, они не являются неотъемлемой часть изобретения. Кроме того, эти дополнительные блоки ассоциированы с обычными функциями узла, т.е. с тем, что настоящее изобретение не затрагивает.
Первая память 22 является здесь, преимущественно, энергонезависимой памятью, которая может хранить данные, когда питание отсутствует. Блок 26 связи в этом первом варианте является интерфейсом для осуществления связи с другими узлами в сети связи и может, по этой причине, быть интерфейсом, таким как интерфейс S2 LTE.
Фиг. 3 схематично показывает штекерный и розеточный элемент, здесь штекерный ME 30 и розеточный FE 32 элемент соединителя. Один из элементов является частью модуля, и оба элемента необходимы для получения действующего узла сети. Элемент, являющийся частью модуля, является здесь первым стыковочным элементом, в то время как элемент, с которым должен стыковаться этот первый стыковочный элемент, является вторым стыковочным элементом. В приведенном здесь примере эти элементы обеспечены для подачи узлу электропитания. В соответствии с этим первым вариантом изобретения они также используются для обнаружения физического изменения вышеупомянутого модуля. Здесь штекерный элемент 30 включает в себя два контакта, скомпонованы так, чтобы входить в соответствующие выемки или гнезда розеточного элемента 32. Здесь розеточный элемент 32 обеспечен объектом 28 для обнаружения физических изменений. Этот объект 28 обеспечен в полости, включающей в себя выемки, эта полость обеспечена для приема штекерного элемента 30. Из этого можно понять, что в этом варианте изобретения розеточный элемент является часть модуля. Таким образом, можно видеть, что в этом примере первый стыковочный элемент является розеточным элементом, а второй стыковочный элемент является штекерным элемент. Объект 28, кроме того, отделен от выемок или гнезд, с которыми должны стыковаться штекерные контакты. Кроме того, объект 28 для обнаружения физических изменений размещен так, чтобы первоначальный контакт между контактом и выемкой был установлен до обнаружения подключения. Здесь соединители являются соединителями электропитания, где штекер соединителя снабжен парой проводников 34, которые обеспечивают электропитание для узла. Штекерный элемент 30 может здесь быть частью штекера для подключения к распределительной сети. Розеточный элемент 32 может, с другой стороны, быть частью адаптера или преобразователя для преобразования подаваемого питания в форму, необходимую для работы модуля. Таким образом, это означает, что штекерные и розеточные элементы могут быть элементами, которые необходимы для работы узла. Здесь они необходимы, потому что они обеспечивают энергию, необходимую для работы узла.
Таким образом, в этом примере изобретения штекерный элемент 30 должен вводиться в зацепление или вставляться в розеточный элемент 32 для обеспечения питания базовой станции и выводиться из зацепления или разъединяться для прекращения подачи питания базовой станции. Однако ввод в зацепление или вывод из зацепления штекерного элемента с розеточным элементом в этом варианте изобретения обнаруживается с помощью объекта 28 для обнаружения физических изменений, который генерирует сигнал I, указывающий это физическое изменение.
Теперь будет описано первое общее функционирование изобретения со ссылкой на фиг. 1-4, где последняя показывает схему последовательности операций общего способа для индикации физического изменения внешней части первого узла сети.
Как отмечалось выше, сеть связи 10 может включать в себя большое число узлов, и они в различные моменты времени могут подвергаться изменениям, заменам или обновлениям. Обновление здесь может включать в себя замену части или всего узла. Узел может также быть изменен по другим причинам, например, потому что кто-то осуществляет действия по отношению к узлу.
Все эти изменения являются физическими и поэтому существует потребность обнаруживать такие физические изменения узлов, которые являются изменениями физической внешней части узла или части узла, например модуля узла сети, составляющего весь или части узла. После того, как изменение было обнаружено, может быть необходимо выполнить одно из многих соответствующих действий. Одно действие может заключаться в обеспечении замененного узла корректными данными о местоположении. Другое может быть тем, что принимаются данные идентификатора связи по сети, такие как сетевой идентификатор, например, данные идентификатора транспортной связи, возможно в виде IP-адреса. Эти данные могут, например, предоставляться вторым устройством обработки индикации. Дополнительным действием может быть то, что на модуле установлено правильное программное обеспечение и соответствующие лицензии этого программного обеспечения. Это может также быть деятельностью по обеспечению безопасности, гарантирующей, что в узел не вмешались незаконно.
Таким образом, чтобы запустить такие действия должно произойти обнаружение изменения внешней части. Это изменение внешней части, в соответствии с изобретением, обнаруживается через подключение или отключение штекерного элемента 30 к или от розеточного элемента 32. Поэтому, если штекерный элемент 30 вставляется или извлекается из розеточного элемента 32, это перемещение между штекерным элементом ME 30 и розеточным элементом FE 32 обнаруживается детектором 20 перемещения объекта 28 обнаружения физического изменения, этап 36, который в свою очередь передает сигналы об этом обнаружении блоку 24 управления. Детектор 20 перемещения, таким образом, выполнен с возможностью обнаруживать перемещение между штекерным элементом 30 и соответствующим розеточным элементом 32. Блок 24 управления затем генерирует индикацию I перемещения или изменения внешней части узла, этап 38. Блок 24 управления, таким образом, выполнен с возможностью генерировать индикацию физического изменения модуля узла сети на основании обнаруженного перемещения. Блок 24 управления, кроме того, инициирует процедуру обработки индикации, этап 39. Таким образом, эта процедура инициируется на основании генерируемой индикации. Процедура может быть выполнена посредством отправления индикации I одному из устройств обработки индикации через блок 26 связи, например, первому устройству 16 обработки индикации. В этой процедуре обработки индикации блок 24 управления может быть дополнительно выполнен с возможностью получать новую конфигурацию от этого другого узла сети, формирующего устройство обработки индикации. Это может включать в себя прием данных о местоположении. Процедура обработки индикации может дополнительно или вместо этого выполняться через блок 24 управления, инициирующий процедуру внутренним образом посредством обеспечения ряда мер, при этом эти меры должны быть выполнены до того, как может быть обеспечено или возобновлено нормальное функционирование. Эти меры могут требовать, чтобы полевой оператор выполнил действия или ввел требуемые данные, такие как запись о местоположении, пароли, кодовые слова и т.д. Блок управления может, таким образом, также быть выполнен с возможностью осуществлять по меньшей мере одну меру безопасности на основании генерируемой индикации.
Таким образом, можно указать, что в узле сети было сделано физическое изменение.
Посредством использования разъема питания получается дополнительное преимущество. Уведомление о физическом изменении можно отправить, используя энергию от соединителя. Это означает, что для получения уведомления не требуются дополнительные источники питания.
Есть несколько путей реализации детектора перемещения, из которых три варианта, два с использованием электрических компонентов и один на основании механических компонентов, описаны здесь.
Первый вариант детектора перемещения, который является электрическим вариантом, основанном на питании переменным током (AC), схематично показан на фиг. 5.
Здесь напряжение VAC источника питания переменного тока (AC) приложено между двумя входными клеммами, где первая входная клемма ведет к первому концу первого резистора R1 через первый диод D1, в то время как вторая входная клемма также ведет к первому концу первого резистора R1, но через второй диод D2. Первый конец второго резистора R2 соединен с первым концом первого резистора, а второй конец второго резистора R2 соединен с анодом тиристора TH. Катод тиристора TH соединен с землей, а затвор соединен со вторым концом первого резистора R1. Второй конец первого резистора R1, кроме того, также соединен с землей через переключатель SW, который может быть переключателем, приводимым в действие механически.
На фиг. 5 показано первое напряжение V1 на первом конце первого резистора R1, второе напряжение V2 на втором конце первого резистора R1 и третье напряжение V3 в соединении между вторым резистором R2 и тиристором TH. Второе напряжение V2 здесь также обеспечивается на затворе тиристора TH.
Теперь будет описана работа детектора перемещения со ссылкой на фиг. 6, которая показывает напряжения V1, V2 и V3, а также указание, когда замыкается переключатель SW.
Когда штекерный элемент вставляется в розеточный элемент, напряжение VAC питания принимается на клеммах, это напряжение VAC выпрямляется диодами и подается на первый конец первого резистора R1. Это означает, что первое напряжение V1 будет действовать как постоянное напряжение (DC), которое изменяется от низкого к высокому уровню, когда штекерный и розеточный элементы входят в зацепление. Поскольку переключатель SW еще не замкнут, то есть он разомкнут, второе напряжение V2 станет высоким благодаря первому резистору R1 и будет следовать за первым напряжением V1. Это, в свою очередь, приводит к включению тиристора TH. Таким образом, тиристор TH начинает проводить ток. Тиристор TH здесь может быть установлен включаться, если на затворе присутствует напряжение выше нуля. То, что тиристор TH проводит ток, когда первое напряжение V1 начинает повышаться, обозначено с помощью более толстой линии уровня третьего напряжения V3, чем другие напряжения. Так как тиристор TH проводит ток, третье напряжение V3 далее сохраняется низким. После этого приводится в действие переключатель SW за счет того, что штекерный элемент соединителя вставляется далее в розеточный элемент. Поэтому переключатель замыкается или включается SW_ON. Когда это происходит, второе напряжение V2 становится низким. Однако тиристор TH по-прежнему проводит ток, и поэтому третье напряжение V3 останется низким. Таким образом, можно заметить, что создается импульс на втором конце первого резистора R1, который может использоваться для индикации того, что было произведено физическое изменение.
Фиг. 7 показывает те же напряжения V1, V2 и V3 в случае, если детектор перемещения получает питание, когда штекерный элемент уже вставлен в розеточный элемент. Это означает, что в этом случае переключатель SW уже замкнут. Здесь можно заметить, что когда подается питание, первое напряжение V1 повышается с низкого до высокого уровня. Следует также отметить, что так как переключатель SW уже замкнут или включен, второе напряжение V2 останется на низком уровне. Так как второе напряжение V2 является низким, это также означает, что тиристор TH выключен, что, в свою очередь, приводит возрастанию третьего напряжения V3 вместе с первым напряжением V1. Таким образом, оно следует за первым напряжением V1.
Комбинации этих трех напряжений могут использоваться для индикации, что подается питание. Однако они также могут различать случай, когда питание обеспечено посредством вставки штекерного элемента соединителя в розеточный элемент соединителя, и другие случаи, такие как восстановление после предшествующего перебоя в питании. Таким образом, это было описание того, как может использоваться детектор перемещения на фиг. 5.
Таким образом, можно видеть, что разъем питания сконструирован так, что переключатель добавлен в нижней части полости розеточного элемента. Во время вставки штекерного элемента этот переключатель активируется после замыкания контактов питания. Разница во времени между подачей питания и активацией переключателя используется для создания импульса, который можно зафиксировать и использовать в качестве индикации физического изменения. Таким образом, объект обнаружения физического изменения может предпринять действия, когда модуль узла сети запущен должным образом. Таким образом, это означает, что когда штекерный элемент частично вставлен в розеточный элемент, подается питание. После этого, когда кабельный соединитель полностью вставлен в розеточный элемент, активируется переключатель. Кроме того, описанная выше процедура подачи электропитания может быть легко отделена от процедуры включения электропитания, когда разъем питания уже вставлен.
Таким образом, можно различать различные сценарии подачи питания, такие как подачу питания при возврате питания после перебоя, подачу питания при замыкании внешнего переключателя, подачу питания при замыкании внутреннего переключателя и подачу питания при вставлении разъема питания.
Таким образом, как можно видеть, штекерные и розеточные элементы являются элементами разъема питания, а детектор перемещения является электрическим и содержит переключатель, выполненный с возможностью изменения положения переключателя. Это изменение положения переключателя генерирует индикацию, когда есть перемещение между штекерным элементом и розеточным элементом. Также можно заметить, что тиристор TH и первый и второй резисторы R1 и R2 совместно образуют делитель напряжения, выполненный с возможностью отделять подачу питания из-за перемещения между штекерным и розеточным элементами и другими ситуациями подачи питания.
Фиг. 8 показывает другой электрический вариант, когда напряжение питания является DC напряжением. Отличие от варианта на фиг. 5 здесь состоит в том, что первая клемма ведет непосредственно к первому концу первого резистора R1, в то время как вторая клемма ведет непосредственно к земле. Таким образом, убраны два диода. Когда DC напряжение VDC прикладывается между этими двумя клеммами, достигается такой же тип функционирования, как был описан со ссылкой на первый вариант.
Другим возможным вариантом является механический вариант детектора перемещения. Такая реализация схематично показана на фиг. 9. Есть имеется стержень 42, приводимый в движение перемещением штекерного элемента относительно розеточного элемента. Этот стержень 42 входит в зацепление с зубцами шестерни 40. Также имеется подпружиненный удерживающий элемент 44, примыкающий к шестерне 40, в частности, для удержания зубца шестерни. Каждому зубцу соответствует считываемый паттерн 46, например, в виде штрих-кода. Имеется, наконец, средство 47 считывания паттерна, размещенное относительно шестерни 40 выровненным с паттерном 46 зубца для считывания считываемого паттерна этого зубца, когда шестерня имеет некоторое положение.
Вставление штекерного элемента в розеточный элемент будет, в соответствии с этим вариантом, вводить в зацепление стержень 42 с одним зубцом и, таким образом, двигать шестерню 40 и, здесь, поворачивать шестерню 40 на одно положение шестерни так, что новое положение шестерни с новым паттерном обращено к средству 47 считывания. Сила со стороны стержня 42 заставит, в свою очередь, уйти удерживающий элемент 44 из текущего положения и вместо этого удерживать следующее. Таким образом, стержень заставляет шестерню 40 поворачиваться в одну сторону, а удерживающий элемент 44 удерживает шестерню 40 от вращения в противоположную сторону, чтобы гарантировать, что шестерня не вращается в обратную сторону.
Все положения шестерни здесь могут иметь различные коды. Как вариант, достаточно, чтобы смежные положения шестерни имели различные коды, или чтобы три последовательных положения шестерни имели три различных кода. Таким образом, перемещение штекерного и розеточного элементов относительно друг друга приводит к тому, что средство 47 считывания считывает различные паттерны. Эта различие может затем использоваться для индикации, что имело место изменение внешней части узла.
Таким образом, можно заметить, что детектор перемещения в этом варианте является механическим и содержит стержень 42, шестерню 40, имеющую много положений шестерни, каждое из которых имеет соответствующий считываемый паттерн 46, и средство 47 считывания паттерна, где стержень 42 выполнен с возможностью входить в зацепление с шестерней 40, и он приводится в движение посредством перемещения между штекерным элементом и розеточным элементом. Таким образом, стержень заставляет шестерню переходить в новое положение, которое средство 47 считывания паттерна выполнено с возможностью считывать и обеспечивать блоку управления. Блок управления затем изучает текущий и предыдущий паттерны и генерирует индикацию на основании разницы.
Говоря иначе, можно, таким образом, видеть, что положение стержня 42 изменяется, что может происходить при его нажатии в розеточном элементе, когда штекерный элемент вводится в зацепление или выводится из зацепления от этого розеточного элемента. Это перемещение заставляет шестерню совершать поворот в новое положение, которое будет сохраняться до следующего раза, когда штекерный и розеточный элементы снова войдут в зацепление или выйдут из соединения. Каждое положение шестерни будет генерировать уникальный паттерн. Паттерн будет распознаваться средством 47 считывания, когда электронный блок получит питание. При подаче питания базовой станции, паттерн, считанный устройством распознавания паттерн, может быть сравнен с паттерном, сохраненным в энергонезависимой памяти в прошлый раз, когда блок был включен. Если паттерны отличаются, блок считается замененным или новым в системе, и программным обеспечением блока предпринимаются действия. Таким образом, можно видеть, что в этом случае паттерны шестерни обеспечивают механическую память изменения.
Шестерня, таким образом, может рассматриваться как механический счетчик, который может считываться электронным образом. Это может быть полезно, когда в качестве индикации используется не только разъем питания, что может быть необходимо, когда желательно указать, что модуль был перемещен из своего исходного положения/местоположения. Когда модуль будет включен в следующий раз, он может обнаружить событие и предпринять в связи с этим действия.
Теперь будет описан первый предпочтительный способ работы объекта обнаружения физического изменения со ссылкой на фиг. 1, 2 и 10, где последняя показывает схему последовательности операций способа индикации физического изменения внешней части модуля узла сети. Этот вариант связан с тем фактом, что узел должен быть обеспечен данными о местоположении, такими как данные о географическом положении. Другим типом данных о местоположении, которые могут быть обеспечены для узла, является положение в топологии сети.
Если узел сети является базовой станцией, данные о местоположении базовой станции могут быть не всегда основаны на пути физического соединения сети связи, потому что карта сетевого пути может не всегда быть верна, или сеть может даже отсутствовать во время установки базовой станции. Поэтому хранить данные о местоположении на другом узле в сети не всегда возможно.
Получение данных о местоположении автоматически с помощью интегрированного приемника Глобальной навигационной системы (GPS) или с использованием аналогичной системы позиционирования не всегда возможно, потому что узел сети может быть размещен в областях без покрытия GPS.
Приведенное выше обсуждение показывает, что в некоторых случаях единственным вариантом является размещение данных о местоположении внутри узла сети, и тогда возникает новая сложность. Данные о местоположении должны храниться в энергонезависимой памяти, чтобы перенести перебой в питании, и когда модуль узла сети заменяется другим модулем узла сети, данные о местоположении будут сопровождать замененный модуль узла сети. Эта ситуация может привести к наличию в узле ошибочных данных о местоположении. Настоящее изобретение решает эту проблему.
Способ здесь начинается с обнаружения детектором 20 перемещения штекерного элемента 32 относительно розеточного элемента 30, этап 48, которое может быть выполнено посредством использования любого из трех ранее описанных вариантов детектора перемещения. Это обнаружение, в свою очередь, вызывает сброс первой памяти M1 22, этап 50. Первая память 22, таким образом, сбрасывается при обнаружении перемещения. Это означает, что любые данные о местоположении, которые присутствуют в этой памяти 22, сбрасываются. Также блок 24 управления получает информацию о выполненном обнаружении. Блок 24 управления может затем генерировать индикацию I физического изменения внешней части базовой станции на основании обнаруженного перемещения, этап 52. Блок 24 управления после этого отправляет индикацию I первому устройству 16 обработки индикации через блок 26 связи, этап 54.
Устройство 16 обработки индикации может тогда проанализировать индикацию и обеспечить в ответ данные о местоположении. Оно может, например, проанализировать идентификатор сети или адрес транспортной сети устройства, которое отправило индикацию, и найти данные о местоположении, ассоциированные с этим адресом, которые оно предварительно сохранило, для идентификатора сети, используемого первым узлом сети. Здесь данные о местоположении могут быть данными о географическом местоположении или данными о местоположении в топологии сети. Блок 24 управления затем принимает новые данные о местоположении в ответ на индикацию, этап 56, и сохраняет эти новые данные о местоположении в первой памяти 22, этап 58. Блок 24 управления естественным образом принимает данные о местоположении через блок 26 связи. От этого можно видеть, что в этом примере устройство обработки индикации является устройством генерации местоположения, и что в процедуре обработки индикации блок управления выполнен с возможностью принимать новые данные о местоположении от этого устройства генерации местоположения.
Таким образом, обнаружение выполняется, когда один модуль узла сети заменяется другим или присоединяется впервые. Старые данные о местоположении тогда стираются, и запускается автоматическая функция системы в первом устройстве обработки индикации, которая обновляет данные о местоположении. Дополнительно или как вариант, если присутствует полевой оператор, этот полевой оператор может быть уведомлен, что должны быть обеспечены новые данные о местоположении.
Таким образом, можно видеть, что в соответствии с изобретение происходит обнаружение, когда электронный модуль, здесь базовая станция, механически соединяется с источником питания, это событие запоминается/фиксируется так, что когда электронный модуль запускается, он определяет ситуацию и может затем предпринять действия на основании факта, что он заменен или является новым в системе.
Обнаружение, описанное выше, было обнаружением подключения разъема питания к модулю узла сети в виде базовой станции. Следует понимать, что может выполняться обнаружение и другого типа. Как вариант, возможно, что обнаружение физического изменения выполняется на основании того факта, что модуль механически присоединяется к крепежному устройству, например, болтами к поверхности. Вариантом последнего способа является случай, когда к блоку подключается какой-либо соединитель кабеля.
Вариант осуществления, описанный выше, состоит, по сути, из трех функций.
Подвижная механическая функция, на которую влияет среда вокруг модуля, функция обнаружения перемещения, воспринимающая, что положение перемещаемой части, примером которой служат штекерный и розеточный элементы, изменилось по сравнению с ее предыдущим положением, и функция памяти, которая сохраняет "индикацию измененного положения" для последующего использования. Эта индикация может затем быть считана блоком управления, когда модуль включен и находится в рабочем состоянии.
Выше память была описана как энергонезависимая память. В качестве альтернативы, примером которой служит механический вариант детектора перемещения, память может быть сделана в виде механического объекта и работать, когда на блок не подается питание. Запоминающее устройство может также быть сделано в виде электронного компонента при использовании для индикации вставления разъема питания или в ситуациях, когда на электронный модуль уже подается питание, например, от внутреннего аккумулятора.
Таким образом, возможно обновление данных о местоположении базовой станции на основании обнаружения изменения физической внешней части, такого как подключение или отключение шнура питания.
Первый пример использования изобретения может заключатся в том, что когда новый модуль установлен и подключено питание, новая ситуация с модулем обнаруживается объектом обработки индикации. Старые данные о местоположении тогда стираются из памяти. Установщик затем может быть проинформирован и побужден ввести новые данные о местоположении в модуль. После ввода новые данные о местоположении затем сохраняются в памяти в блоке.
Второй пример использования изобретения в отношении замены неисправного модуля может заключаться в том, что устанавливается новый модуль и подключается питание. Новая ситуация с модулем затем обнаруживается детектором перемещения. Старые данные о местоположении стираются из энергонезависимой памяти в модуле. Устройство обработки индикации в сети связи получает информацию, и существующие данные о местоположении загружаются в узел. После этого новые данные о местоположении сохраняются в энергонезависимой памяти в модуле.
Третий пример использования изобретения в отношении комбинации с блоком позиционирования, таким как блок GPS, может заключаться в том, что устанавливается новый модуль и подключается питание. Обнаруживается новая ситуация с модулем. Старые данные о местоположении стираются из энергонезависимой памяти. Принимается местоположение от блока GPS. Новые данные о местоположении сохраняются в энергонезависимой памяти в модуле.
В приведенных примерах обнаруживалось физическое изменение, сделанное в отношении всего узла сети. Следует, однако, понимать, что узел сети может состоять из нескольких модулей. Таким образом, возможно, что тот же самый тип обнаружения может быть обеспечен в отношении одного или более модулей узла.
Фиг. 11 показывает вариант модуля 50 базовой станции, который может использоваться в качестве одного из нескольких модулей в базовой станции. Модуль 50 узла сети может, таким образом, быть первым модулем узла сети в наборе модулей узла сети, содержащихся в узле сети.
Этот первый модуль 50 включает в себя те же самые блоки, что и модуль на фиг. 3. Кроме того, эти блоки функционируют таким же образом. Однако в дополнение он включает в себя счетчик 28, соединенный и с детектором 20 перемещения и с блоком 24 управления, блок 29 позиционирования, соединенный с блоком 24 управления, а также шинный соединитель 27. Блок управления здесь является блоком управления модуля. Кроме того, шинный соединитель 27 является интерфейсом к соединителю шины объединительной платы.
Блок 29 позиционирования может быть блоком спутниковой навигации, который получает местоположение от спутника. Он может таким образом быть блоком Глобальной навигационной системы (GPS). Таким образом, можно получить местоположение без осуществления связи с сетью связи.
Фиг. 12 схематично показывает объединительную плату 52 узла сети с множеством слотов, в которые могут быть вставлены модули в виде печатных плат. Здесь имеется первый слот SL1 54, второй слот SL2 56, третий слот SL3 58, четвертый слот SL4 60, пятый слот SL5 62, шестой слот SL6 64 и седьмой слот SL7 66. Также имеется вторая память 68, эта вторая память является встроенной в плату памятью, а также имеет преимущество энергонезависимой памяти. На фигуре также показан первый модуль 50 с шинным соединителем 27.
Штекерным и розеточным элементами здесь являются два соединителя, один на плате и один на карте. Здесь первый слот 54 может быть розеточным элементом, в то время как шинный соединитель 27 на печатной плате 50 может быть штекерным элементом. Из этого можно понять, что в этом варианте изобретения штекерный элемент является частью первого модуля. В этом варианте изобретения первый стыковочный элемент является, таким образом, штекерным элементом, а второй стыковочный элемент является розеточным элементом. Однако, для получения действующего узла сети необходимы оба элемента. Перемещение может быть обнаружено таким же образом, как описано выше. Однако здесь детектируется подключение карты к объединительной плате, а не подключение шнура питания. Подключение может, таким образом, быть подключением для передачи данных, но также или дополнительно подключением источника питания.
Теперь будет описано функционирование изобретения в соответствии с этим последним вариантом со ссылкой на фиг. 11, 12 и 13, где последняя показывает схему последовательности некоторого числа этапов способа, выполняемых в варианте способа для индикации физического изменения внешней части первого узла сети.
Как и прежде, способ начинает с обнаружения детектором 20 перемещения штекерного элемента относительно розеточного элемента, этап 74, здесь перемещения шинного соединителя 27 относительно первого слота 54.
Это запускает счетчик 28, который увеличивает значение CO счетчика, этап 76. Значение CO счетчика может здесь быть значением счетчика карты или модуля. Счетчик 28, таким образом, выполнен с возможностью изменять значение на основании обнаруженного перемещения. Блок 24 управления затем получает это значение CO счетчика и сравнивает его с порогом значения счетчика, то есть с порогом неисправности. Если значение счетчика выше порога, этап 78, то блок 24 управления обеспечивает сигнал индикации неисправности, этап 80. Сигнал индикации неисправности может, таким образом, генерироваться на основании обнаруженного перемещения. Сигнал индикации неисправности, таким образом, предпочтительно отправляется, только если счетчик 28 имеет значение, переходящее порог неисправности. Блок 24 управления может затем отправить его другому узлу сети, например, второму устройству 18 обработки индикации в сети 10 связи. Также возможно, что неисправность указывается каким-либо другим образом, например, с помощью визуальной индикации на самой карте. Генерируемая индикация может здесь быть индикацией, что карта или первый модуль пришла в негодность и должна быть заменена.
Однако если порог не превышен, этап 78, блок управления 24 генерирует индикацию I физического изменения первого модуля на основании обнаруженного перемещения, этап 82, и первая память 22 тогда сбрасывается, этап 84. После этого индикация I отправляется блоком 24 управления. В этом варианте осуществления она отправляется другим модулям платы через шинный соединитель 27, этап 86. Если один из них имеет данные о местоположении, то этот другой модуль пошлет в виде ответа эти данные о местоположении. Поэтому блок 24 управления принимает данные о местоположении от другого модуля через шинный соединитель 27, этап 88. Эти данные о местоположении затем предоставляются первой памяти 22 и сохраняются в ней, этап 90. Таким образом, можно видеть, что первый модуль узла сети соединен с объединительной платой 52, с которой уже соединены по меньшей мере некоторые из других модулей узла сети в наборе, и каждый из этих других модулей узла сети содержит идентичные данные о местоположении. Затем блок управления выполнен с возможностью принимать данные о местоположении от по меньшей мере одного из этих других подключенных модулей.
Здесь возможно, что если ни у одного из других модулей нет таких данных о местоположении, то эти данные могут быть получены с помощью блока 29 позиционирования. В этом случае блок 29 позиционирования может, таким образом, получить положение узла сети, запускаемое генерируемой индикацией.
Другой возможный вариант состоит в том, что во второй памяти 68 хранится соответствующее значение счетчика слота и порог значения счетчика слота, присвоенный первому слоту 54. Оба этих значения могут быть получены блоком 24 управления из второй памяти 68 через шинный соединитель 27, так как шинный соединитель 27 карты 50 вставлен в слот 54. Блок 24 управления затем сравнивает значение счетчика слота с порогом значения счетчика слота. Если значение счетчика слота переходит порог значения счетчика слота, то блок управления может сгенерировать индикацию неисправности слота. Если значение счетчика слота не переходит порог значения счетчика слота, то блок 24 управления увеличивает или уменьшает значение счетчика слота и затем сохраняет порог значения счетчика слота и измененное значение счетчика слота во второй памяти 68. Как вариант, возможно, что вместо второй памяти 68 имеется второй блок управления, то есть блок управления платы на шине объединительной платы, этот второй блок управления содержит процессор, счетчик для каждого слота и вторую память. В этом варианте индикация неисправности по отношению к числу вставлений карты может отправляться блоком 24 управления модуля блоку управления платы через шинный соединитель 27 и первый слот 54. Блок управления платы может тогда таким же образом увеличивать счетчик слота каждый раз, когда карта вставляется в соответствующий слот, и сравнивать это значение счетчика с порогом счетчика слота. Такой блок управления платы может затем указать неисправность, если такой порог был перейден. Как дополнительный вариант, возможно, что блок 24 управления модуля непосредственно считывает значение счетчика слота через шинный соединитель 27 и непосредственно обеспечивает индикацию.
Таким образом, можно указывать, сколько раз конкретная карта вставлялась в слоты, что является степенью износа карты. В то же время можно указывать, сколько раз карты вставлялись в конкретный слот, что является показателем износа слота и, возможно, также и платы.
Описанные выше счетчики, которые могут быть, как вариант, механическими и использовать описанный ранее принцип стержня, могут, таким образом, использоваться для предсказания срока службы модуля/разъема. Во многих случаях имеются ограничения на то, сколько раз модуль может быть перемещен со своего места с гарантией функционирования, что обычно имеет место для разъемов. В иллюстративном варианте осуществления объединительной платы, описанном выше, некоторое число карт, таким образом, вставляется в объединительную плату, и эти карты могут многократно вставляться/извлекаться. Разъемы карты и разъемы объединительной платы, таким образом, имеют гарантируемый срок службы, который зависит от того, сколько раз они были вставлены/извлечены. Это детектируется с помощью функционала счетчика описанного выше типа на каждой карте.
Каждый из описанных выше разъемов объединительной платы может дополнительно иметь идентификатор, который может считываться картами. Доступ к памяти блока управления объединительной платы могут иметь все карты. Энергонезависимая память модулей может, в свою очередь, использоваться для хранения числа вставлений в объединительную плату. Поэтому, когда модуль запускается или на него подается питание, он может проверить, был ли он вставлен в объединительную плату посредством считывания значения его счетчика, и если это так, обновить свою энергонезависимую память новым значением счетчика. Модуль может затем проверить, был ли превышен максимальный предел числа вставлений, и если это так, он может отправить уведомление оператору. После этого модуль может обновить энергонезависимую память на объединительной плате новым значением счетчика и положением карты. Модуль может затем проверить, был ли превышен максимальный предел числа вставлений для разъема объединительной платы (максимальный предел числа вставлений из энергонезависимой памяти объединительной платы), и если это так, он отправляет уведомление оператору.
Изобретение имеет ряд преимуществ. Оно упрощает обнаружение, имело ли место изменение физической внешней части модуля в узле. Это может предотвратить неправильную идентификацию модуля в сети связи, и тем самым предотвратить не оптимальное планирование радиочастотной (RF) сети. Изобретение также предотвращает ситуацию, когда полевой оператор идет по неправильному адресу, заменяя дефектный блок. Как отмечалось ранее, существует множество других типов сценариев, где может использоваться изобретение. Как отмечалось ранее, это изобретение может также использоваться в качестве индикации вмешательства в конструкцию узла. Если модуль или кабель извлечены, у оператора может сработать сигнал тревоги.
Это изобретение может также использоваться в качестве запускающего механизма для:
- процесса определения нового идентификатора сетевой связи,
- процесса определения нового идентификатора идентификационной метки лицензии,
- или процесса новой инициализации безопасности.
Изобретение было проиллюстрировано на примере использования в базовой станции. Следует, однако, понимать, что изобретение не ограничивается этим, и может использоваться в любой сети связи, содержащей много узлов.
Блок управления модуля и платы может быть обеспечен в виде процессора с ассоциированной памятью для хранения программ, включающей в себя код компьютерной программы для реализации ее функциональности. Следует иметь в виду, что этот блок управления может также быть обеспечен в виде аппаратных средств, например, в виде специализированной интегральной схемы (ASIC). Код компьютерной программы может также быть обеспечен на машиночитаемом средстве, например, в виде носителя информации, такого как диск CD-ROM или карта памяти, который реализует функцию вышеописанного блока управления модуля, будучи загруженным в вышеупомянутую память для хранения программ и исполняемым процессором.
Хотя изобретение было описано применительно к тому, что в настоящее время считается наиболее целесообразным и предпочтительными вариантами осуществления, следует понимать, что изобретение не должно ограничиваться раскрытыми вариантами осуществления, а наоборот, предполагается, что оно включает в себя различные модификации и эквивалентные компоновки. Поэтому изобретение ограничивается только прилагаемой формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ СОЕДИНЕНИЯ С ВОЗМОЖНОСТЬЮ ПЕРЕДАЧИ ДАННЫХ ПОЛЕВЫХ УСТРОЙСТВ С УДАЛЕННЫМ ТЕРМИНАЛЬНЫМ БЛОКОМ | 2017 |
|
RU2743506C2 |
| НЕСУЩАЯ СИСТЕМА АВИАЦИОННОГО ЭЛЕКТРОННОГО ОБОРУДОВАНИЯ | 2006 |
|
RU2464749C2 |
| Высокопроизводительная вычислительная платформа на базе процессоров с разнородной архитектурой | 2016 |
|
RU2635896C1 |
| СОЕДИНИТЕЛЬ С ДВОЙНОЙ ОРИЕНТАЦИЕЙ С ВНЕШНИМИ КОНТАКТАМИ | 2011 |
|
RU2544839C2 |
| Устройство релейной защиты и автоматики (варианты) | 2015 |
|
RU2615138C1 |
| Бортовая приемо-запросная аппаратура (БПЗА) | 2021 |
|
RU2762140C1 |
| СЕТЕВОЙ КОММУТАТОР МОДУЛЬНОЙ ОРГАНИЗАЦИИ (ВАРИАНТЫ) | 2023 |
|
RU2806827C1 |
| ЭЛЕКТРОННЫЙ СОЕДИНИТЕЛЬ С ДВОЙНОЙ ОРИЕНТАЦИЕЙ И ВНЕШНИМИ КОНТАКТАМИ | 2012 |
|
RU2581845C2 |
| КОМПЛЕКС ВЫЧИСЛИТЕЛЬНЫЙ УПРАВЛЯЮЩИЙ С МЕЖМОДУЛЬНОЙ ШИНОЙ FBUS | 2024 |
|
RU2840079C1 |
| ВЫЧИСЛИТЕЛЬНЫЙ КОМПЛЕКС РЕГИСТРАЦИИ И СИНТЕЗА РАДИОТЕХНИЧЕСКИХ СИГНАЛОВ | 2007 |
|
RU2351979C2 |





Изобретение относится к сетям беспроводной связи и предназначено для регистрации физического изменения внешней части модуля узла сети, входящего в состав узла сети. В соответствии с изобретением модуль (19) узла сети содержит детектор (20) перемещения, выполненный с возможностью обнаруживать перемещение между штекерным элементом и соответствующим розеточным элементом, причем модуль узла сети содержит один из элементов, и оба элемента необходимы для того, чтобы получить действующий узел сети, и блок (24) управления, выполненный с возможностью генерировать индикацию физического изменения модуля узла сети на основании обнаруженного перемещения. 3 н. и 20 з.п. ф-лы, 13 ил.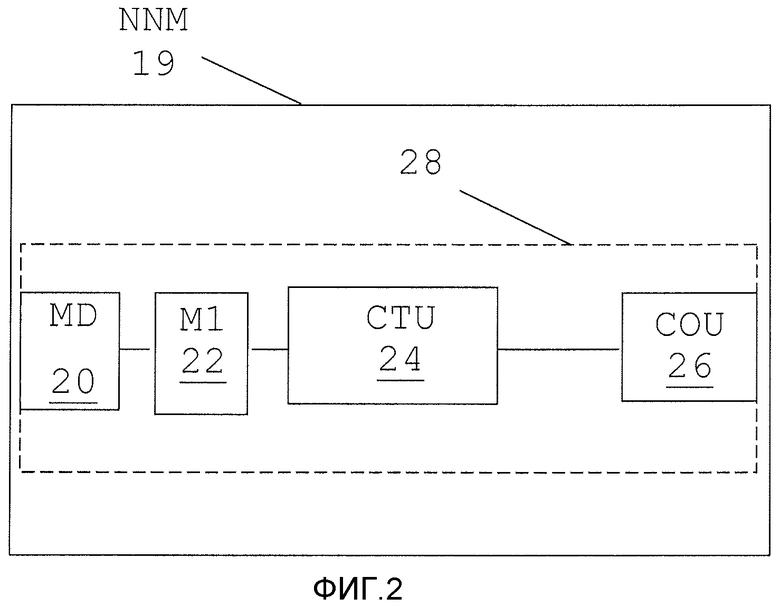
1. Модуль (19; 50) узла сети, входящий в состав узла сети (10) беспроводной связи, причем модуль узла сети содержит:
детектор (20) перемещения, выполненный с возможностью обнаруживать перемещение между первым и вторым стыковочным элементом (32, 30; 27, 54), причем модуль узла сети содержит первый стыковочный элемент (32; 27) и оба стыковочных элемента необходимы для получения действующего узла сети,
память (22) модуля, выполненную с возможностью быть сброшенной на основании обнаруженного перемещения, таким образом стирая старые данные о местоположении, и
блок (24) управления, выполненный с возможностью генерировать индикацию физического изменения в отношении внешней части модуля узла сети на основании обнаруженного перемещения и инициировать процедуру обработки индикации на основании сгенерированной индикации, причем процедура обработки индикации содержит прием новых данных о местоположении.
2. Модуль узла сети по п.1, дополнительно содержащий блок (26) связи, при этом блок управления, когда выполнен с возможностью инициировать процедуру обработки индикации, выполнен с возможностью отправлять индикацию физического изменения устройству (18) обработки индикации через блок связи.
3. Модуль узла сети по п.2, в котором устройство обработки индикации является устройством генерации местоположения и блок управления выполнен с возможностью принимать новые данные о местоположении от устройства генерации местоположения в ходе выполнения процедуры обработки индикации.
4. Модуль узла сети по п.2, в котором устройство (16) обработки индикации является другим узлом сети в сети беспроводной связи, а блок управления выполнен с возможностью получать новую конфигурацию от этого другого узла сети через блок связи в ходе выполнения процедуры обработки индикации.
5. Модуль узла сети по п.4, в котором новая конфигурация содержит новые данные о местоположении.
6. Модуль узла сети по п.4, в котором блок управления выполнен с возможностью принимать идентификатор сети от другого узла (18) сети в ходе выполнения процедуры обработки индикации.
7. Модуль узла сети по любому из предыдущих пунктов, в котором блок управления дополнительно выполнен с возможностью осуществлять по меньшей мере одну меру безопасности на основании сгенерированной индикации.
8. Модуль узла сети по п.4, в котором процедура обработки индикации содержит процедуру обработки лицензии на программное обеспечение.
9. Модуль узла сети по любому из пп. 1-6, в котором блок управления выполнен с возможностью отправлять сигнал индикации неисправности на основании обнаруженного перемещения.
10. Модуль узла сети по п.9, дополнительно содержащий счетчик (28), причем упомянутый счетчик выполнен с возможностью изменять значение на основании обнаруженного перемещения.
11. Модуль узла сети по п. 10, в котором блок управления выполнен с возможностью отправлять сигнал индикации неисправности, только если счетчик имеет значение, переходящее порог неисправности.
12. Модуль узла сети по любому из пп. 1-6, в котором упомянутый модуль узла сети является первым модулем (50) узла сети в наборе модулей узла сети, входящих в состав узла сети, детектор перемещения выполнен с возможностью обнаруживать подключение или отключение упомянутого первого модуля (50) узла сети к или от объединительной платы (54), к которой уже подключены по меньшей мере некоторые из других модулей узла сети в упомянутом наборе, при этом каждый из других модулей узла сети содержит идентичные данные о местоположении и блок управления выполнен с возможностью принимать данные о местоположении от по меньшей мере одного из упомянутых других подключенных модулей.
13. Модуль узла сети по любому из пп. 1-6, в котором детектор перемещения является механическим и содержит стержень (42), шестерню (40), имеющую несколько положений шестерни, каждая из которых имеет соответствующий считываемый паттерн (46), и средство (47) считывания паттерна, причем упомянутый стержень выполнен с возможностью входить в контакт с шестерней (40) и приводиться в действие посредством перемещения между первым стыковочным элементом и вторым стыковочным элементом, таким образом вызывая перемещение шестерни в новое положение шестерни, а средство (47) считывания паттерна выполнено с возможностью считывать паттерн и предоставлять блоку управления, при этом упомянутый блок управления дополнительно выполнен с возможностью исследовать текущий и предыдущий паттерн и генерировать индикацию на основании разницы.
14. Модуль узла сети по любому из пп.1-6, в котором первый и второй стыковочные элементы являются элементами разъема питания, а детектор перемещения является электрическим и содержит переключатель (SW), выполненный с возможностью изменять положение и, таким образом, генерировать индикацию, когда имеется перемещение между первым стыковочным элементом и вторым стыковочным элементом, а также устройство (R1, R2, ТН) деления напряжения, выполненное с возможностью различать ситуации подачи питания путем перемещения между первыми и вторыми стыковочными элементами и другими ситуациями подачи питания.
15. Модуль узла сети по любому из пп.1-6, дополнительно содержащий блок (29) позиционирования, выполненный с возможностью получать положение узла сети, запускаемый генерируемой индикацией.
16. Модуль узла сети по любому из пп. 1-6, в котором первый стыковочный элемент является штекерным элементом, а второй стыковочный элемент является соответствующим розеточным элементом.
17. Модуль узла сети по любому из пп.1-6, в котором первый стыковочный элемент является розеточным элементом, а второй стыковочный элемент является соответствующим штекерным элементом.
18. Узел (14) сети в сети (10) беспроводной связи, причем упомянутый узел сети содержит по меньшей мере один модуль (19; 50) узла сети, причем модуль узла сети содержит:
детектор (20) перемещения, выполненный с возможностью обнаруживать перемещение между первым и вторым стыковочным элементом (30, 32; 27, 54), причем модуль узла сети содержит первый стыковочный элемент (32; 27) и оба стыковочных элемента необходимы для того, чтобы получить действующий узел сети,
память (22) модуля, выполненную с возможностью сброса на основании обнаруженного перемещения, таким образом стирая старые данные о местоположении, и
блок (24) управления, выполненный с возможностью генерировать индикацию физического изменения модуля узла сети на основании обнаруженного перемещения и инициировать процедуру обработки индикации на основании сгенерированной индикации, при этом процедура обработки индикации содержит прием новых данных о местоположении.
19. Узел сети по п.18, в котором модуль узла сети является модулем базовой станции, а узел сети является базовой станцией в сети беспроводной связи.
20. Способ индикации физического изменения внешней части модуля (19; 50) узла сети, входящего в состав узла сети в сети (10) беспроводной связи, причем способ содержит этапы, на которых:
обнаруживают (36; 48; 74) перемещение между первым и вторым стыковочным элементом (30, 32; 27, 54), причем модуль узла сети содержит первый стыковочный элемент (32; 27) и оба стыковочных элемента необходимы для того, чтобы получить действующий узел сети,
сбрасывают (50; 84) память модуля на основании обнаружения перемещения, таким образом стирая старые данные о местоположении,
генерируют (38; 52; 82) индикацию (I) физического изменения внешней части модуля узла сети на основании обнаруженного перемещения, и
инициируют (39) процедуру обработки индикации на основании сгенерированной индикации, причем процедура обработки индикации содержит прием (56; 88) новых данных о местоположении.
21. Способ по п.20, в котором сбрасывание содержит сбрасывание конфигурации модуля узла сети на основании обнаружения перемещения.
22. Способ по п.21, в котором модуль узла сети содержит память (22) модуля, содержащую данные о местоположении модуля, а сбрасывание конфигурации содержит сбрасывание (50; 84) памяти модуля на основании обнаружения перемещения.
23. Способ по любому из пп.20-22, в котором процедура обработки индикации содержит отправку (54) индикации физического изменения устройству обработки индикации.
| WO 00/25542 A1, 04.05.2000 | |||
| US 2003153359 A1, 14.08.2003 | |||
| СПОСОБ СБОРКИ И ОДНОСТОРОННЕЙ СВАРКИ СТЫКОВЫХ СОЕДИНЕНИЙ ТОНКОЛИСТОВЫХ МАТЕРИАЛОВ | 1994 |
|
RU2071888C1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| US 2011002239 A1, 06.01.2011 | |||
| УПРАВЛЯЕМЫЕ ИНТЕРАКТИВНЫЕ УСТРОЙСТВА | 2006 |
|
RU2408933C2 |

