Область техники
Заявленное изобретение - Бортовая приемо-запросная аппаратура (БПЗА) (условное обозначение - изделие А-877) - относится к области систем определения местоположения и предназначена для применения совместно с радиолокационным маяком-ответчиком (РЛМО) (условное обозначение - изделие Е-877) для обеспечения десантирования; обеспечения привода летательных аппаратов (ЛА) на необорудованные аэродромы; обозначения замаскированных объектов и участков местности; поиска и спасения.
Уровень техники
Из уровня техники известна радиолокационная система для летательных аппаратов, основанная на принципе передачи бортовым радиолокационным комплексом данных на наземный объект (RU 2480788 C2, 27.04.2013), которая может быть принята в качестве наиболее близкого аналога заявленного изобретения. Известное решение позволяет наземному объекту формировать радиолокационное изображение местности, визуально отображаемое на устройстве отображения информации.
Однако известное решение не позволяет обеспечить точное определение местоположения самого наземного объекта и не может использоваться, в частности, для привода летательных аппаратов на необорудованные аэродромы, обозначения замаскированных объектов и участков местности, поиска и спасения.
Задачей заявленного изобретения является обеспечение указанных выше возможностей.
Достигаемые технические результаты
а) Повышение точности определения местоположения РЛМО. В прочих режимах работы БПЗА точность определения местоположения РЛМО составляет ±200 метров, в то время как благодаря новым режимам «Запрос местоположения» и «Запрос координатной информации» точность возрастает до 10 метров.
б) Уменьшение радиочастотного шума (фона), за счет более редкого запроса данных о местоположении РЛМО (нет необходимости часто корректировать данные).
в) Защита информации (при необходимости) о местонахождении РЛМО путем возможности введения кодирования данных о координатах. Это также позволяет исключить ошибки в позиционировании РЛМО, в случае применения средств радиоэлектронной борьбы.
г) Повышение точности вывода ЛА к РЛМО, а также уменьшение опасности обнаружения РЛМО, посторонним.
Данные технические результаты обеспечиваются, в том числе, за счет приема координатной информации в двух режимах работы: «Запрос местоположения» и «Запрос координатной информации».
Раскрытие изобретения
Для достижения указанных выше технических результатов предлагается Бортовая приемо-запросная аппаратура, включающая приемную антенну, пульт управления и индикации и блок приема, передачи и обработки информации, при этом блок приема, передачи и обработки информации содержит приемник радиосигналов, устройство сопряжения и управления и источник вторичного электропитания, причем приемник радиосигналов своим первым входом связан с приемной антенной, своими вторыми входами/выходами связан с первыми входами/выходами устройства сопряжения и управления, а своими третьими входами связан с соответствующими выходами устройства вторичного электропитания, пульт управления и индикации своими первыми входами связан с бортовой сетью постоянного тока с номинальным напряжением +27В, своими вторыми входами связан с соответствующими выходами источника вторичного электропитания, своими третьими входами/выходами связан со вторыми входами/выходами устройства сопряжения и управления, своими четвертыми выходами связан с соответствующими входами источника вторичного электропитания, устройство сопряжения и управления своими третьими входами связано с соответствующими выходами источника вторичного электропитания, своими четвертыми входами/выходами связано с бортовым оборудованием, не входящим в состав бортовой приемо-запросной аппаратуры, своими пятыми входами/выходами сопряжено с радиолокационной станцией, имеющей передающую антенну, а источник вторичного электропитания содержит первый преобразователь напряжения, вторые преобразователи напряжений, схему контроля напряжений, при этом вход первого преобразователя напряжения связан с соответствующим четвертым выходом пульта управления и индикации, выход первого преобразователя напряжения связан с соответствующим входом схемы контроля напряжений, второй вход которой связан с соответствующим четвертым выходом пульта управления и индикации и с соответствующим входом системы контроля напряжений, а выход - со входами вторых преобразователей напряжений, выходы которых связаны с системой контроля напряжений и образуют соответствующие выходы источника вторичного электропитания, при этом пятые входы/выходы устройства сопряжения и управления связаны с соответствующими входами/выходами схемы контроля напряжений источника вторичного электропитания, причем для приема и передачи данных между устройством сопряжения и управления, бортовым оборудованием, радиолокационной станцией и пультом управления и индикации использован интерфейс ARINC-429, а устройство сопряжения и управления дополнительно выполнено с возможностью кодирования/декодирования данных, относящихся к координатам местоположения.
Пояснения к чертежу
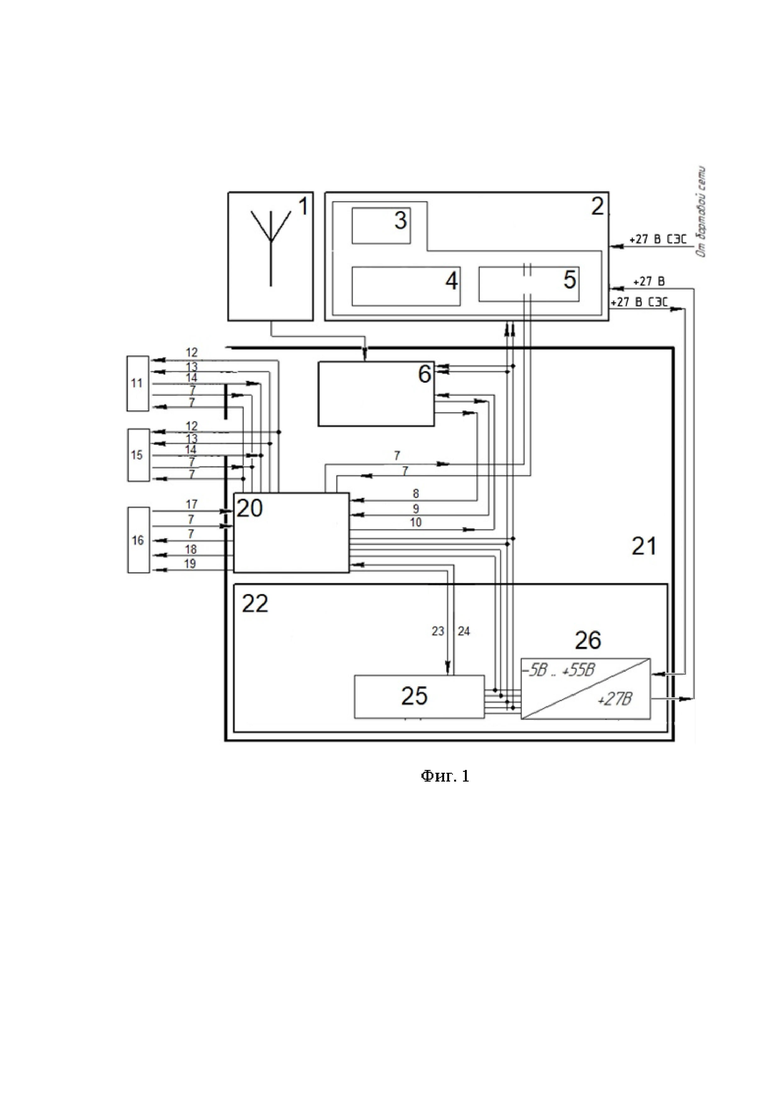
На фигуре 1 представлена структурная схема комплекса БПЗА.
1. Антенна А-877.00.101
2. Пульт управления и индикации А-877.00.801 (ПУИ)
3. Экран (дисплей) ПУИ
4. Светодиодные индикаторы ПУИ
5. Клавиатура ПУИ
6. Приемник А-877.71.301
7. Интерфейс ARINC-429
8. Foc - частота ответных сигналов
9. Исправность УПС (устройство приема сигналов)
10. Запуск ВК УПС (встроенного самоконтроля устройства приема сигналов)
11. К УВС2 (управляющая вычислительная система самолета 2)
12. ИСПР Приемн. (сигнал «Исправность приемника»)
13. ИСПР А-877 (сигнал «Исправность изделия А-877»)
14. Контр. А-877 (сигнал «Контроль исправности изделия А-877»)
15. К УВС1 (управляющая вычислительная система самолета 1)
16. К РЛС-П (радиолокационная станция панорамного обзора)
17. ИУ (импульс управления)
18. ИЗП (импульс запуска передатчика)
19. ВСАК (видеосигнал активного канала)
20. Устройство сопряжения и управления А-877.71.401
21. Блок приема передачи и обработки информации А-877.71
22. Источник вторичного электропитания А-877.71.901
23. Запуск ВК ИВЭП (встроенный самоконтроль источника вторичного электропитания)
24. Исправность ИВЭП (источник вторичного электропитания)
25. Схема контроля напряжений
26. Преобразователи из +27В в прочие напряжения
Осуществление изобретения
Предлагаемый комплекс БПЗА является аппаратурой формирования запросных сигналов, приема и обработки ответных сигналов от РЛМО и индикации их местоположения на индикаторе кругового обзора радиолокационной станции (РЛС-П) в составе комплекса бортового оборудования летательного аппарата (ЛА). Запросные сигналы от БПЗА для РЛМО передаются через РЛС-П.
Совместная работа БПЗА с РЛМО осуществляется посредством использования определенных фиксированных радиочастот: для запросных (через РЛС-П) и ответных (от РЛМО) сигналов. Используется собственный логический код взаимодействия (протокол) для передачи данных и определения номера РЛМО и БПЗА. Код взаимодействия увеличивает помехоустойчивость и помогает устанавливать связь РЛМО - БПЗА с количеством до 30 летательных аппаратов.
Режим «Запрос местоположения» предназначен для решения задач привода ЛА на необорудованные аэродромы, задач поиска и спасения, а также задач десантирования, при условии возможности работы РЛМО совместно со средствами глобальной навигационной системы ГЛОНАСС, GPS и (или) введенных данных о местоположении маяка-ответчика его оператором. В данном режиме БПЗА выдает запросные сигналы, принимает ответный сигнал, содержащий координатную информацию от РЛМО, обрабатывает ответный сигнал и на основе принятых ответных сигналов выдает координатную информацию РЛМО по последовательному каналу передачи данных ARINC 429 на оборудование ЛА. Так же предусмотрена возможность просмотра координатной информации РЛМО на дисплее пульта управления и индикации БПЗА.
Режим «Запрос координатной информации» предназначен для передачи координатной информации выбранного объекта от РЛМО на БПЗА. В данном режиме БПЗА выдает запросный сигнал, принимает ответный сигнал от РЛМО, содержащий координатную информацию объекта, обрабатывает и на основе принятых ответных сигналов выдает полученную координатную информацию объекта по последовательному каналу передачи данных ARINC 429 на оборудование ЛА. Так же предусмотрена возможность просмотра координатной информации объекта на дисплее пульта управления и индикации БПЗА.
Возможность приема координат реализована за счет внедрения в состав БПЗА быстродействующих цифровых микросхем, в том числе микросхемы ПЛИС и микроконтроллеров, которые обеспечивают прием, обработку больших объемов информации и передачу обработанной информации на оборудование ЛА по цифровым линиям передачи данных, а также индикацию на средствах визуального отображения информации.
Также внедрен интерфейс ARINC 429 для связи с внешним оборудованием ЛА. Интерфейс ARINC 429 - это стандарт на компьютерную шину для применения в авионике разработанный фирмой ARINC. Стандарт описывает основные функции и необходимые физические и электрические интерфейсы для цифровой информационной системы самолёта. Сегодня ARINC 429 является доминирующей авиационной шиной для большинства хорошо экипированных самолётов. Технически, ARINC 429 является двухпроводной шиной данных. Соединительные проводники - витые пары. Спецификация определяет электрические характеристики, характеристики обмена данными и протоколы. ARINC 429 использует однонаправленный стандарт шины данных (линии передачи и приёма физически разделены). Формат сообщений предусматривает наличие меток, представленных в восьмеричной системе счисления, которые являются идентификатором данных. Для каждого типа оборудования определён ряд стандартных параметров, одинаковых для всех производителей и моделей. Например, любая инерциальная навигационная система представляет барометрическую высоту самолёта как метка 203. Это позволяет в определённой степени обеспечить взаимозаменяемость частей, поскольку все инерциальные навигационные системы ведут себя, по большей части, таким же образом.
Возможность обмена информацией между изделием и оборудованием ЛА по интерфейсу ARINC 429, обеспечивается применением микросхем, в которых имеется возможность реализации данного стандарта. Таким образом, применение в БПЗА дополнительных программно-аппаратных средств позволило обеспечить связь изделия и бортового оборудования по современным линиям и стандартам связи.
Описание конструкции бортовой приемо-запросной аппаратуры (изделие А-877).
В основу построения изделия А-877 положены следующие основные принципы, определяющие его конструкцию:
- Минимальные массогабаритные характеристики;
- Стойкость изделия к внешним воздействующим факторам согласно требованиям ГОСТ РВ 20.39.304-98 для группы исполнения 3.2.1 или 3.2.3 в зависимости от размещения в самолете.
- Соответствие основным техническим требованиям ТЗ на (электропитание от бортовой сети, прием ответных сигналов на частоте Fос, индикации местоположения обнаруженных РЛМО на индикаторе кругового обзора РЛС-П в составе бортового оборудования ЛА).
Электропитание БПЗА осуществляется от бортовой сети постоянного тока номиналом 27 В. В изделии А-877 реализован контроль исправности входящих узлов и блоков. При отказе одного или более узлов выводится сообщение на пульте управления «ОТКАЗ» красного цвета и сообщение об отказе на цифровом дисплее в виде текста.
Для обеспечения составных частей изделия необходимыми номиналами напряжения электропитания, в состав изделия входит источник вторичного электропитания, преобразующий входное бортовое электропитание в необходимые номиналы.
Для приема ответного сигнала РЛМО на частоте Fос (ответный сигнал) в состав изделия входит приемная антенна с вертикальной поляризацией и приемное устройство.
Для передачи запросных сигналов на частоте Fзс (запросный сигнал) изделие А-877 сопрягается с РЛС-П и передает сигнал через него.
Для выдачи запросных сигналов на РЛС-П и обработки ответных сигналов от РЛМО, формирования и выдачи сигнала индикации местоположения, обнаруженных РЛМО, на индикаторе кругового обзора РЛС-П, осуществления управления и инициализации встроенного контроля составных частей и изделия в целом в состав изделия входит устройство сопряжения и управления.
С точки зрения соблюдения электромагнитной совместимости, ремонтопригодности и взаимозаменяемости, изделие конструктивно выполнено в виде отдельных узлов (что можно видеть на Фиг. 1):
первый узел - устройство приема радиосигналов (приемник) 6;
второй узел - устройство сопряжения и управления 20;
третий узел - устройство управления питанием и формирования вторичных напряжений 22;
четвертый узел - пульт управления и индикации 2;
пятый узел - антенна приемная 1.
Первый 6, второй 20 и третий 22 узлы электрически связаны между собой посредством внутренних межплатных соединителей, и объединены в один блок 21 приема, передачи и обработки информации А-877.71.
Пульт управления и индикации выполнен в виде конструктивно съемной единицы, состоит из монохромного светодиодного индикатора, отдельных светодиодных индикаторов зеленого и красного цвета, клавиатуры, тумблера включения изделия и врубного низкочастотного соединителя для подключения к изделию. Конструктивно, устанавливается с лицевой стороны на приборной панели штурмана ЛА.
Антенна подключается к блоку А-877.71 посредством радиочастотного кабеля.
Пульт управления и индикации подключается к блоку А-877.71 посредством экранированного кабельного жгута.
Подключение блока А-877.71 к бортовому радиоэлектронному оборудованию и системе электроснабжения ЛА осуществляется посредством кабельного жгута.
Узлы внутри блока А-877.71 соединяются между собой посредством объединительной платы, входящей в состав блока А-877.71. Коммутация объединительной платы с внешними кабелями осуществляется через лицевую плату, входящую в состав блока А-877.71.
Для защиты антенны от внешних воздействующих факторов предусмотрено покрытие радиопрозрачным материалом-обтекателем и обеспечена герметичность. Корпус обтекателя крепится винтами к корпусу с наружной стороны ЛА.
Исходя из выше изложенного состав изделие А-877 представлен в следующем виде:
1) Блок приема, передачи и обработки информации, блок А-877.71, в него входят:
- устройство сопряжения и управления, узел А-877.71.401;
- устройство приема радиосигналов, узел А-877.71.301;
- источник вторичного электропитания, узел А-877.71.901;
- плата лицевая, плата А-877.00.01;
- плата объединительная, плата А-877.00.02;
2) Антенна, узел А-877.00.101;
3) Пульт управления и индикации, узел А-877.00.801;
Состав комплекта монтажных частей (КМЧ):
1) комплект документации;
2) комплект ручного инструмента.
Особенности
Возможность получать координаты РЛМО реализована только при взаимодействии с такими маяками-ответчиками, которые способны выдавать такую информацию, что возможно использовать также при кодировании данных.
Связь между бортовым оборудованием ЛА по известному из уровня техники интерфейсу ARINC 429 реализована благодаря включению в схему устройства сопряжения и управления, а также пульта управления и индикации, отечественных микросхем, в которых реализован данный интерфейс.
Масса центрального блока А-877.71, по сравнению с моноблоком
А-817 уменьшилась с 13,2 кг до 4,9 кг, а габариты (Ш×В×Г) с 286×265×474 мм до 90,4×194×318 мм.
Масса пульта управления А-877.71.801, по сравнению с пультом С1.7 уменьшилась с 2,5 кг до 1,2 кг, а габариты (Ш×В×Г) с 146×208×95 мм до 146×119×67,4 мм.
Вышеизложенное уменьшение массогабаритных характеристик достигнуто за счет применения более современной отечественной элементной базы радиокомпонентов, а также изменения алгоритма работы узлов устройства.
КПД источника вторичного электропитания составляет 70,7% для бортовой сети постоянного тока.
- В режимах «Индивидуальный запрос», «Обзор», «Фиксированный запрос» блок приема, передачи и обработки информации (блок А-877.71), через РЛС-П, передает запросный сигнал на частоте Fзс, в котором заложен специализированный «Запросный код». Ответный сигнал с соответствующим «Ответным кодом», принимается устройством сопряжения и управления через приемную антенну и приемник. Этот сигнал детектируется, вычисляется расстояние до маяка и, полученная информация о расстоянии до РЛМО, выдается на пульт управления в виде текста, а также на блок управления РЛС-П, который, в свою очередь, формирует изображение РЛМО на местности в виде точки на соответствующем расстоянии от точки, исходящей сканирующей линии (луча) на экране РЛС-П.
- В режимах «Запрос местоположения» и «Запрос координатной информации» блок А-877.71, через приемную антенну и приемник, получает ответный сигнал от РЛМО с координатами своего местоположения. Этот сигнал детектируется в устройстве сопряжения и управления и оттуда выдается информация о координатах на пульт управления в виде текста, а также на УВС (прочее бортовое оборудование), откуда выдается на экран РЛС-П в виде точки на местности.
- Конструкция БПЗА выполнена в виде функционально законченных узлов (модулей). Узлы, входящие в блок А-877.71 между собой соединяются межплатным соединителем (кросс-плата), находящимся внутри корпуса блока. Использование данных соединителей позволяет оперативно модернизировать БПЗА, улучшает ремонтопригодность. Антенна, пульт управления и блок А-877.71 соединены между собой низкочастотными и высокочастотными кабелями. Связь с прочим оборудованием ЛА осуществляется так же, через кабельное соединение.
| название | год | авторы | номер документа |
|---|---|---|---|
| Радиолокационный маяк-ответчик (РЛМО) с передачей координат в цифровом виде | 2021 |
|
RU2762231C1 |
| УНИФИЦИРОВАННАЯ СИСТЕМА РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2014 |
|
RU2576023C1 |
| НАЗЕМНЫЙ РАДИОЛОКАЦИОННЫЙ ЗАПРОСЧИК ПЕРЕДВИЖНОГО КОМПЛЕКСА | 2009 |
|
RU2439610C2 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2014 |
|
RU2571870C1 |
| РАДИОЛОКАЦИОННЫЙ ЗАПРОСЧИК СИСТЕМЫ АКТИВНОГО ЗАПРОСА-ОТВЕТА | 2008 |
|
RU2375723C2 |
| Интегрированная вычислительная система самолета МС-21 | 2017 |
|
RU2667040C1 |
| НАВИГАЦИОННО-РАДИОЛОКАЦИОННАЯ СИСТЕМА РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2022 |
|
RU2805163C1 |
| СИСТЕМА РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ С ПАКЕТНОЙ ПЕРЕДАЧЕЙ МЕТЕОРОЛОГИЧЕСКОЙ ИНФОРМАЦИИ | 2013 |
|
RU2529177C1 |
| Способ определения координат летательного аппарата относительно взлётно-посадочной полосы | 2016 |
|
RU2620587C1 |
| РАДИОЛОКАЦИОННО-НАВИГАЦИОННАЯ СИСТЕМА РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2022 |
|
RU2793597C1 |
Использование: изобретение относится к области систем активной радиолокации, размещаемых на борту летательных аппаратов. Сущность: бортовая аппаратура содержит приемную антенну, пульт управления и индикации и блок приема, передачи и обработки информации, объединенные посредством интерфейса ARINC-429 с возможностью кодирования данных. Технический результат: повышение точности определения местоположения, уменьшение радиочастотного шума и повышение защищенности информации. 1 ил.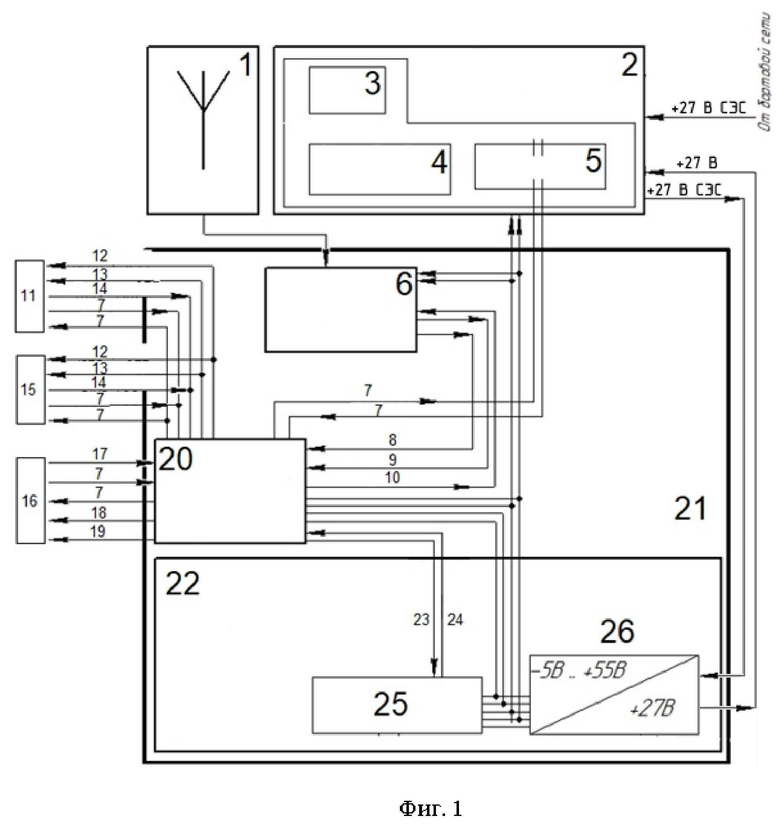
Бортовая приемо-запросная аппаратура, включающая приемную антенну, пульт управления и индикации и блок приема, передачи и обработки информации, при этом блок приема, передачи и обработки информации содержит приемник радиосигналов, устройство сопряжения и управления и источник вторичного электропитания, причем приемник радиосигналов своим первым входом связан с приемной антенной, своими вторыми входами/выходами связан с первыми входами/выходами устройства сопряжения и управления, а своими третьими входами связан с соответствующими выходами устройства вторичного электропитания, пульт управления и индикации своими первыми входами связан с бортовой сетью постоянного тока с номинальным напряжением +27В, своими вторыми входами связан с соответствующими выходами источника вторичного электропитания, своими третьими входами/выходами связан со вторыми входами/выходами устройства сопряжения и управления, своими четвертыми выходами связан с соответствующими входами источника вторичного электропитания, устройство сопряжения и управления своими третьими входами связано с соответствующими выходами источника вторичного электропитания, своими четвертыми входами/выходами связано с бортовым оборудованием, не входящим в состав бортовой приемо-запросной аппаратуры, своими пятыми входами/выходами сопряжено с радиолокационной станцией, имеющей передающую антенну, а источник вторичного электропитания содержит первый преобразователь напряжения, вторые преобразователи напряжений, схему контроля напряжений, при этом вход первого преобразователя напряжения связан с соответствующим четвертым выходом пульта управления и индикации, выход первого преобразователя напряжения связан с соответствующим входом схемы контроля напряжений, второй вход которой связан с соответствующим четвертым выходом пульта управления и индикации и с соответствующим входом системы контроля напряжений, а выход - со входами вторых преобразователей напряжений, выходы которых связаны с системой контроля напряжений и образуют соответствующие выходы источника вторичного электропитания, при этом пятые входы/выходы устройства сопряжения и управления связаны с соответствующими входами/выходами схемы контроля напряжений источника вторичного электропитания, причем для приема и передачи данных между устройством сопряжения и управления, бортовым оборудованием, радиолокационной станцией и пультом управления и индикации использован интерфейс ARINC-429, а устройство сопряжения и управления дополнительно выполнено с возможностью кодирования/декодирования данных, относящихся к координатам местоположения.
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ ЗЕМЛИ | 2010 |
|
RU2480788C2 |
| СПОСОБ ФОРМИРОВАНИЯ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ОБЪЕКТА И УСТРОЙСТВО ФОРМИРОВАНИЯ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ | 1998 |
|
RU2143708C1 |
| Способ обжига портландцементного клинкера во взвешенном состоянии во вращающихся печах | 1952 |
|
SU99874A1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2015 |
|
RU2594759C1 |
| WO 2010039303 A3, 22.07.2010. | |||

