Настоящее изобретение относится к способу управления дозирующим насосом и/или регулирования дозирующего насоса. Дозирующий насос обычно имеет приводной электродвигатель с валом, приводимым в движение электродвигателем, и вытесняющий элемент, расположенный в дозирующей головке. В этом случае вращательное движение вала преобразуется в колебательное движение вытесняющего элемента, так что вытесняющий элемент, взаимодействуя попеременно с выпускным и впускным клапанами, обеспечивает выполнение хода насоса (хода нагнетания) и хода впуска (хода всасывания) и, таким образом, подачу среды, подлежащей дозированию.
Данные дозирующие насосы функционируют на основе объемного принципа, то есть операция дозирования выполняется посредством вытеснения некоторого объема из замкнутой камеры посредством вытесняющего элемента. Дозируемый объем при каждом ходе определяется произведением величины хода и эффективной площади поверхности вытесняющего элемента.
В подобном дозирующем насосе по существу непрерывное вращательное движение приводного электродвигателя преобразуется в колебательное движение вытесняющего элемента посредством передаточного устройства. Может быть осуществлено надежное управление приводом вытесняющего элемента, или привод вытесняющего элемента также может быть выполнен с одной стороны при принудительной взаимоблокировке только при осуществлении хода нагнетания. В последнем случае должны быть предусмотрены меры для перемещения вытесняющего элемента снова назад. Это может быть выполнено, например, посредством соответствующей возвратной пружины.
Обычные дозирующие насосы, как правило, являются мощными и имеют характеристики дозирования, соответствующие большинству применений.
В простейшем случае приводной электродвигатель будет постоянно включен для непрерывно продолжающегося дозирования или его включают на заданное время для выполнения отдельных ходов дозирования. Частота вращения электродвигателя определяется электрической частотой напряжения сети или системы запуска электродвигателя и, следовательно, определяет продолжительность каждого хода вместе с соответствующим понижающим передаточным отношением и передаточной характеристикой, которая, например, является синусоидальной в случае эксцентриковой передачи. При непрерывной работе продолжительность каждого хода рассчитывают исходя из эффективной частоты вращения электродвигателя в нагруженном состоянии и понижающего передаточного отношения. При включении или выключении приводного электродвигателя для выполнения отдельных ходов или частичных ходов должны быть учтены соответствующие времена запуска и торможения, которые соответственно увеличивают продолжительность хода. Длину хода можно регулировать, например, посредством регулирования эксцентриситета эксцентриковой передачи или посредством использования регулируемого упора, при этом упор, например, может ограничивать перемещение вытесняющего элемента при ходе всасывания до достижения задней мертвой точки эксцентриковой передачи. Это определяет начальную точку движения при выполнении хода, в то время как конечная точка определяется полностью выполненным движением при отводе вытесняющего элемента.
Перемещения вытесняющего элемента происходят в результате взаимодействия механических компонентов, например, таких как передача. Во время движения вперед (хода нагнетания) привод функционирует, преодолевая усилие, действующее на поршневой шток со стороны вытесняющего элемента (и, возможно, имеющейся возвратной пружины).
Существуют варианты осуществления, а именно так называемые диафрагменные дозирующие насосы, в которых в качестве вытесняющего элемента используется по меньшей мере частично упругая диафрагма. Данная диафрагма может деформироваться во время ходов нагнетания и всасывания. Величина деформации, которая усиливается при выполнении первой части хода, не используемой для процесса дозирования, будет «потеряна» для эффективно выполняемого хода, и в результате этого дозируемое количество уменьшается при увеличивающемся рабочем давлении. Следовательно, при использовании данных насосов необходимо выполнять соответствующие измерения с целью калибровки. Однако после выполнения калибровки насос может надежно использоваться только в заданном диапазоне рабочих давлений. В случае изменения рабочего давления должна быть выполнена повторная калибровка. Если калибровка не будет выполнена, например, вследствие того, что колебания рабочего давления не будут замечены, это приведет к ошибке дозирования.
Для лучшего регулирования процесса дозирования и для повышения точности дозирования в Европейском патенте 1754891 уже предложено соединение вытесняющего элемента с опорным элементом, положение которого определяется датчиком положения, при этом датчик положения выдает реальный сигнал, который «жестко» связан с положением опорного элемента и, следовательно, вытесняющего элемента и посредством которого обеспечивается получение информации о перемещениях вытесняющего элемента, так что электронное устройство управления дозирующим насосом может реагировать на условия работы схемы дозирования и насоса.
Следовательно, при данных предпосылках, связанных с описанным уровнем техники, задача настоящего изобретения состоит в разработке способа управления дозирующим насосом и/или регулирования дозирующего насоса, который в принципе может быть реализован без датчика положения на штоке и может задать режим работы насоса при дозировании с высоким уровнем точности.
В соответствии с изобретением данная задача решается посредством способа управления дозирующим насосом и/или регулирования дозирующего насоса, содержащего приводной электродвигатель, имеющий вал, приводимый в движение электродвигателем, и вытесняющий элемент, расположенный в дозирующей головке, в котором вращательное движение вала преобразуется в колебательное движение вытесняющего элемента, при этом вытесняющий элемент, взаимодействуя попеременно с выпускным и впускным клапанами, обеспечивает выполнение хода насоса (хода нагнетания) и хода впуска (хода всасывания) и, таким образом, подачу среды, подлежащей дозированию, в котором измеряют по меньшей мере один рабочий параметр электродвигателя, предпочтительно напряжение U на электродвигателе или ток I в электродвигателе, по меньшей мере один регулируемый параметр рассчитывают исходя из по меньшей мере одного измеренного рабочего параметра электродвигателя и, возможно, дополнительных известных характеристик электродвигателя, данный по меньшей мере один регулируемый параметр сравнивают с заданным ориентирующим параметром (guide parameter) и выдают сигнал сравнения, зависящий от результата сравнения, и данный сигнал сравнения может быть использован в качестве сигнала индикации состояния, управляющего и/или регулирующего сигнала.
Например, существует возможность вычисления фактического крутящего момента MACTUAL электродвигателя и, возможно, фактического магнитного потока ΦACTUAL в электродвигателе, предпочтительно асинхронном электродвигателе, в качестве регулируемого параметра и сравнения его с заданным контрольным ориентирующим параметром, то есть контрольным крутящим моментом и контрольным потоком электродвигателя. Сигнал сравнения может быть выдан в зависимости от результата сравнения. Сигнал сравнения может быть использован, например, в качестве сигнала индикации состояния, то есть сигнал указывает, обеспечено ли соответствие заданному состоянию или нет. В этом случае сигнал индикации состояния может служить, например, в качестве предупреждающего сигнала или в качестве средства инициирования выполнения заданных мер.
Также существует возможность использования сигнала сравнения в качестве управляющего сигнала, то есть для управления параметром, например рабочим параметром, электродвигателя, посредством данного сигнала. В альтернативном варианте сигнал также может быть использован в качестве регулирующего сигнала.
В зависимости от соответствующего регулируемого параметра для целей вычисления необходимы не только рабочие параметры электродвигателя, например, такие как напряжение на электродвигателе и ток в электродвигателе, но и дополнительные характеристики электродвигателя или передачи, например, такие как повышающее или понижающее передаточное отношение.
В дополнительном предпочтительном варианте осуществления предпочтительно, чтобы в качестве регулируемого параметра фактическая частота вращения электродвигателя была измерена предпочтительно множество раз, в частности предпочтительно по меньшей мере пять раз, во время вращения электродвигателя или была рассчитана исходя из рабочих параметров электродвигателя, предпочтительно исходя из фактического крутящего момента MACTUAL электродвигателя и фактического магнитного потока ΦACTUAL в электродвигателе, и разность фактической частоты вращения электродвигателя и заданной контрольной частоты вращения электродвигателя выдают в качестве сигнала сравнения, и сигнал сравнения используют в качестве регулирующего сигнала для адаптации тока I в электродвигателе и/или напряжения U на электродвигателе для настройки фактической частоты вращения электродвигателя в соответствии с контрольной частотой вращения электродвигателя.
В самом простом случае измерение фактической частоты вращения электродвигателя выполняют посредством датчика угла поворота. Однако также существует возможность вычисления фактической частоты вращения электродвигателя исходя из рабочих параметров электродвигателя полностью бесконтактным образом.
В зависимости от конфигурации передачи нагрузка на электродвигатель изменяется в зависимости от текущего положения эксцентрика. Следовательно, электродвигатель с его выходной мощностью должен быть выполнен с такой конструкцией, чтобы он мог обеспечивать заданную частоту вращения даже при наиболее неблагоприятном положении эксцентрика. Если мощность электродвигателя будет слишком низкой, результатом будет то, что заданная частота вращения не будет достигнута при многих положениях эксцентрика, то есть продолжительность хода будет увеличиваться. Мощность электродвигателя может быть лучше использована при применении определенной меры, заключающейся в том, что частоту вращения немного уменьшают в зоне максимального отклонения эксцентрика, в которой передача усилия имеет наиболее неблагоприятные характеристики, при этом результирующее увеличение продолжительности хода компенсируют за счет увеличения частоты вращения в зоне, предполагающей предпочтительную передачу усилия.
В дополнительном предпочтительном варианте осуществления предусмотрено то, что в качестве регулируемого параметра рассчитывают фактическое намагничивание в электродвигателе предпочтительно множество раз, в частности предпочтительно по меньшей мере пять раз, во время вращения электродвигателя исходя из фактического крутящего момента MACTUAL и, возможно, исходя из дополнительных известных характеристик электродвигателя, и заданное контрольное намагничивание в электродвигателе выбирают в качестве ориентирующего параметра, и разность регулируемого параметра и направляющего параметра выдают в качестве сигнала сравнения, и сигнал сравнения используют в качестве регулирующего сигнала для адаптации тока I в электродвигателе и/или напряжения U на электродвигателе для приведения фактического намагничивания в электродвигателе в соответствие с контрольным намагничиванием в электродвигателе, при этом контрольное намагничивание в электродвигателе предпочтительно представляет собой периодическую функцию с продолжительностью периода, которая соответствует продолжительности периода работы вытесняющего элемента.
Предпочтительно предусмотрен прижимной элемент, который обеспечивает поджим поверхности контакта в направлении эксцентрика, так что при вращении вала прижимной элемент может обеспечить удерживание поверхности контакта в контакте с эксцентриком по меньшей мере частично, и ход всасывания может быть выполнен. Прижимной элемент может представлять собой, например, пружину.
В дополнительном предпочтительном варианте осуществления фактический крутящий момент MACTUAL электродвигателя и, возможно, фактический магнитный поток ΦACTUAL в электродвигателе, предпочтительно асинхронном электродвигателе, рассчитывают в качестве регулирующего сигнала, и фактический крутящий момент MACTUAL электродвигателя и, возможно, фактический магнитный поток ΦACTUAL в электродвигателе по существу непрерывно определяют в течение продолжительности по меньшей мере одного периода, и изменяющийся во времени фактический крутящий момент MACTUAL, рассчитанный таким образом, и, возможно, зависящий от времени фактический магнитный поток ΦACTUAL в электродвигателе сравнивают с по меньшей мере одной заданной стандартной функцией (pattern function) в качестве ориентирующего параметра. Сигнал сравнения характеризует степень подобия между регулирующим параметром и ориентирующим параметром, и если степень подобия превышает заданное значение, сигнал сравнения используют в качестве сигнала индикации состояния. Например, выполнение функции защиты от перегрузки, например, в виде отключения при избыточном давлении, может быть инициировано как реакция на сигнал индикации состояния.
С течением времени дозирующий насос обычно демонстрирует явления износа. Они могут включать, например, повреждение подшипников, деформацию зубчатых колес или поврежденный эксцентрик. Подобные явления износа означают, что усилие, которое должно быть приложено со стороны электродвигателя, изменяется. Следовательно, в соответствии с изобретением предусмотрено то, что характеристические модели неисправностей или стандартная функция будут связаны с определенными явлениями износа. Если, например, зубчатое колесо теряет зуб, то отсутствующий зуб будет проявляться в виде периодического нарушения формирования усилия. Если в данном случае фактический крутящий момент рассчитывают по существу непрерывно и сигнал, рассчитанный таким образом, сравнивают со стандартными функциями, например, посредством формирования соответствующей взаимно-корреляционной функции, существует возможность на очень ранней стадии распознать, что дозирующий насос демонстрирует явления износа, и, если требуется, существует возможность только на основе «участвующих» сил определить, какой компонент демонстрирует явления износа и в этом случае должен быть определенно заменен.
Кроме того, может возникнуть ситуация, при которой воздух будет проходить в дозирующую головку, что может вызвать сбой всей операции дозирования, даже несмотря на то, что механическое перемещение вытесняющего элемента будет по-прежнему происходить. В этом случае процесс сжатия, то есть увеличение усилия, также может быть оценен посредством оценки фактического крутящего момента, и, если изменение сжатия укажет на аэрирование дозирующей головки, например, соответствующее сообщение может быть сформировано, или может быть автоматически инициировано выполнение контрмер, например, таких как автоматический отвод воздуха из дозирующей головки.
В дополнительном предпочтительном варианте осуществления предусмотрено то, что дозирующий насос имеет вытесняющий элемент с по меньшей мере частично упругой диафрагмой, при этом дозируемое количество рассчитывают в качестве регулируемого параметра исходя из фактического крутящего момента MACTUAL электродвигателя и, возможно, фактического магнитного потока ΦACTUAL в электродвигателе с учетом дополнительных характеристик электродвигателя, при этом принимают во внимание обусловленное изгибанием упругой диафрагмы ожидаемое влияние на дозируемое количество, и разность фактического дозируемого количества и заданного контрольного дозируемого количества выдают в качестве сигнала сравнения и используют в качестве регулирующего сигнала для адаптации тока I в электродвигателе и/или напряжения U на электродвигателе для приведения фактического дозируемого количества в соответствие с контрольным дозируемым количеством.
Благодаря данной мере дозирующий насос может быть использован в широком диапазоне различных рабочих давлений без возникновения какой-либо погрешности дозирования, заслуживающей упоминания. Более конкретно, если имеет место неожиданное изменение рабочего давления, способ согласно изобретению за счет вычисления фактического крутящего момент обеспечивает возможность надежного распознавания и коррекции погрешности дозирования, вызванной изгибанием диафрагмы вытесняющего элемента.
Кроме того, в предпочтительном варианте осуществления предусмотрено то, что фактическую длину хода вытесняющего элемента рассчитывают в качестве регулируемого параметра исходя из фактического крутящего момента MACTUAL и, возможно, фактического магнитного потока ΦACTUAL, и разность фактической длины хода и заданной контрольной длины хода выдают в качестве сигнала сравнения. Сигнал сравнения может быть использован или в качестве сигнала индикации состояния для возможной остановки насоса, или он может быть использован в качестве регулирующего сигнала для адаптации тока I в электродвигателе и/или напряжения U на электродвигателе для приведения фактической длины хода в соответствие с контрольной длиной хода. Благодаря данной мере длина хода может быть адаптирована для продолжающейся работы, если это необходимо для данной области применения.
Настоящее изобретение также относится к дозирующему насосу, имеющему устройство управления и/или регулирования для реализации описанного способа. Описанный способ означает, что дозирующий насос также может быть использован в режиме хода маятника, то есть направление вращения электродвигателя изменяется на противоположное после самое большее одного хода нагнетания и одного хода всасывания.
Дополнительные преимущества, признаки и возможные применения будут очевидными из нижеприведенного описания предпочтительного варианта осуществления и относящихся к нему чертежей, на которых:
Фиг.1 изображает выполненный с продольным разрезом вид в изометрии дозирующего насоса;
Фиг.2 - схематическое изображение дозирующего насоса;
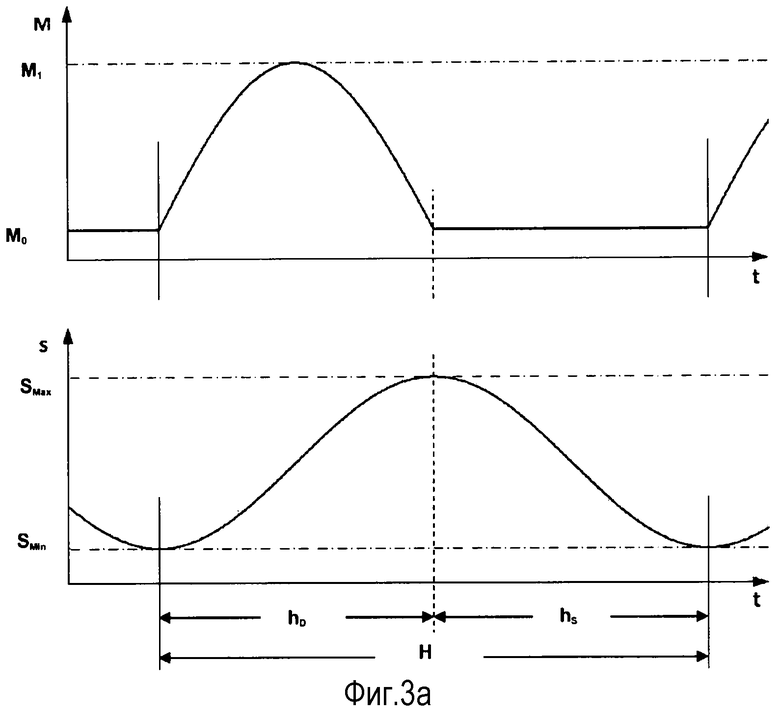
Фиг.3а - график крутящего момента электродвигателя и перемещения вытесняющего элемента во время вращения для полного цикла;
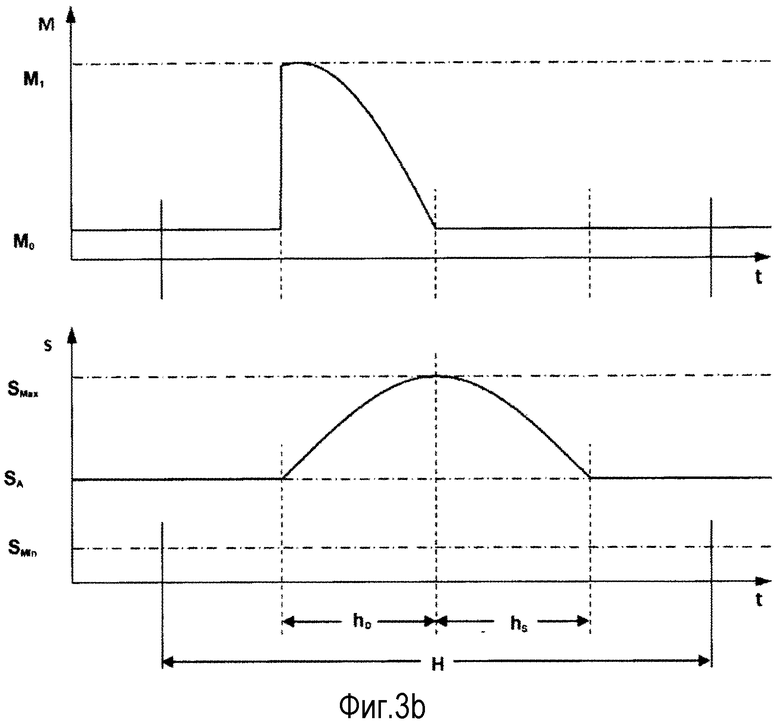
Фиг.3b - график крутящего момента электродвигателя и перемещения вытесняющего элемента во время вращения для частичного цикла;
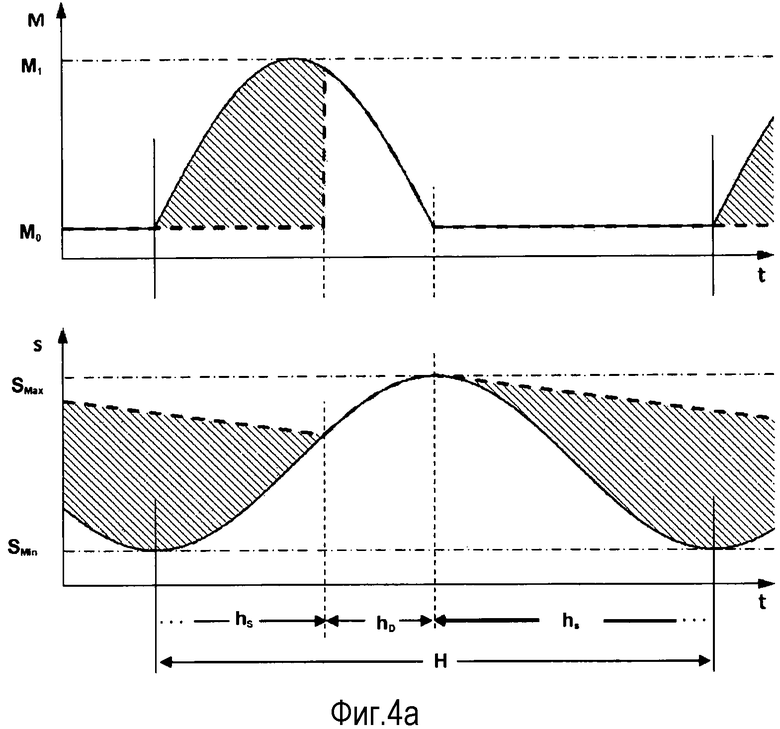
Фиг.4а - график крутящего момента электродвигателя и перемещения вытесняющего элемента во время вращения для полного цикла при неполном ходе всасывания;
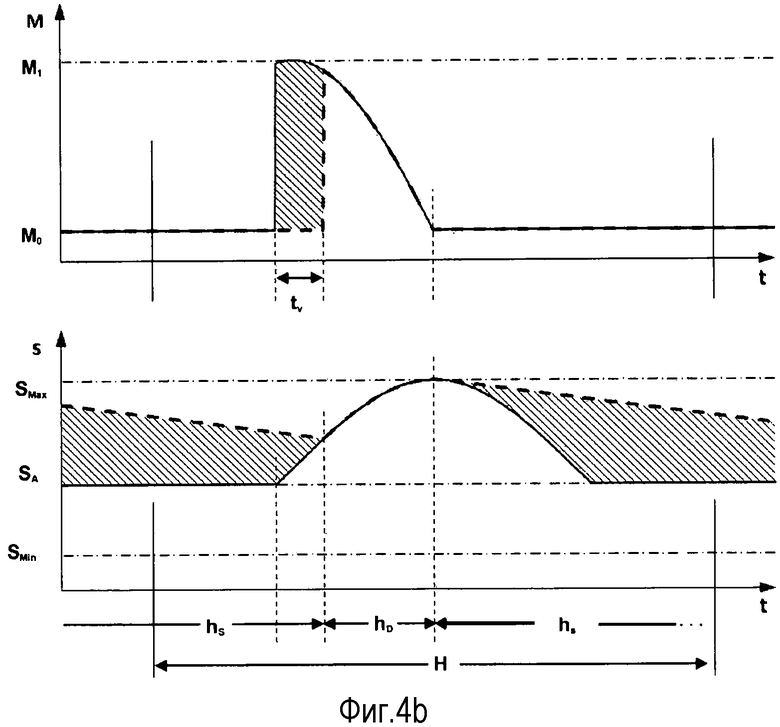
Фиг.4b - график крутящего момента электродвигателя и перемещения вытесняющего элемента во время вращения для частичного цикла при неполном ходе всасывания;
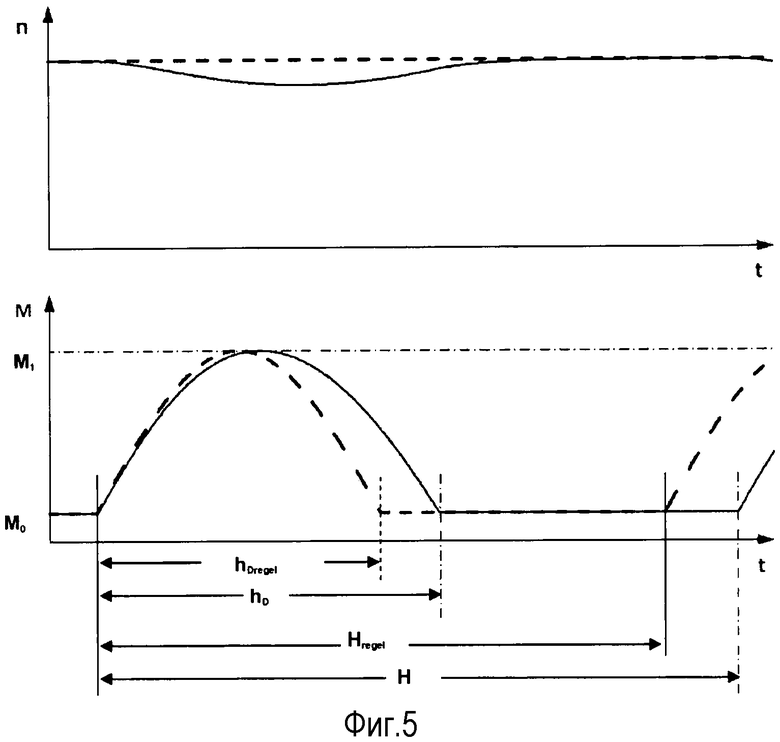
Фиг.5 - график частоты вращения и крутящего момента в зависимости от времени для известных электродвигателей (сплошная линия) и для электродвигателя, регулируемого в соответствии с предпочтительным вариантом осуществления (пунктирная линия).
Фиг.1 показывает конструкцию дозирующего насоса. Дозирующий насос содержит по существу три компонента, а именно: приводной электродвигатель 2 с передаточным устройством, эксцентриковый привод в корпусе 1 эксцентрикового привода и корпус 29 электронного устройства управления с электронным устройством управления, содержащимся в нем, и электронными компонентами и узлами, используемыми в нем. Корпус 29 электронного устройства управления имеет с нижней стороны нижнюю плиту 4 с отверстиями для фиксации, в то время как корпус 1 эксцентрикового привода, который установлен на корпусе 29 электронного устройства управления и жестко соединен с ним, «несет» приводной двигатель 2 с передаточным устройством, который соединен, например, винтами с корпусом эксцентрикового привода.
Компоненты эксцентрикового привода зафиксированы на корпусе, образованном корпусом 1 эксцентрикового привода и корпусом 29 электронного устройства управления, в верхней части. Компоненты эксцентрикового привода смонтированы на держателе 22 эксцентрикового привода, который гарантирует согласование отдельных компонентов друг с другом по положению и прикреплен к корпусу 3 эксцентрикового привода. Трехфазный асинхронный электродвигатель 2 прифланцован вместе с понижающей передачей 11, которая выполнена в виде передачи под углом, как один конструктивный элемент к корпусу 1 эксцентрикового привода снаружи и присоединен винтами. Выходной вал передачи образует прямой угол с осью вала электродвигателя и образует приводной вал непосредственно эксцентрикового привода или, как в проиллюстрированном варианте осуществления, соединен с ним с обеспечением соосности посредством муфты. Приводной вал эксцентрикового привода, то есть вал 17 эксцентрика, установлен с возможностью вращения на держателе 22 эксцентрикового привода и несет эксцентрик в виде детали, неподвижно присоединенной к нему. Вал эксцентрика вместе с эксцентриком проходит через соответствующее упорное кольцо 20 с вырезами. Вал 17 эксцентрика приводится во вращение посредством узла, состоящего из электродвигателя и передачи, посредством приводной муфты, когда электродвигатель 2 приводится в действие, и приводит в движение упорное кольцо 20 со стороны внутренней поверхности его отверстия, а именно поверхности скользящего контакта с наружной поверхностью эксцентрика. Упорное кольцо 20 обеспечивает приведение в движение штока 19, который жестко соединен с ним, например, посредством литья под давлением. Узел, состоящий из упорного кольца 20 и штока 19, опирается в продольном направлении на две направляющие втулки с возможностью смещения. Ось вала 17 эксцентрика и продольная ось 18 упорного кольца 20 и штока 19 находятся, соответственно, в горизонтальной плоскости и образуют прямой угол. Одна из двух втулок 26 для штока 19 закреплена на упорном диске 24, который на стороне нагнетания прикреплен к держателю 22 эксцентрикового привода. Дополнительная втулка 27, в которой размещена цапфа упорного кольца 20, которая удалена от стороны дозирующей головки, входит в палец 8 для регулирования хода. Регулировочный элемент 7, который должен быть приведен в действие вручную для регулировки пальца 8 для регулирования хода, ввинчен в резьбовое отверстие держателя 22 эксцентрикового привода, имеющее ось, совпадающую с продольной осью 18 штока 19; резьба ограничивает перемещение упорного кольца 20 в аксиальном направлении на фазе всасывания и, таким образом, ход дозирующего насоса.
Кроме того, в нижней части корпуса содержится электронная система управления, которая находится в замкнутом пространстве в корпусе 29 электронного устройства управления.
На оси, совпадающей с продольной осью 18 штока, на стороне, противоположной по отношению к линиям 10 передачи сигналов управления, расположена дозирующая головка 12, в которой диафрагма 13, изготовленная, например, из пластика, функционирует в качестве вытесняющего элемента, при этом диафрагма жестко зажата на ее периферии. Кроме того, дозирующая головка 12 несет впускной клапан 14 и выпускной клапан 15, предназначенный для выдавливания среды, подлежащей всасыванию посредством впускного клапана 14 между диафрагмой 13 и дозирующей головкой 12 в дозирующей камере 16, в магистраль для дозирования посредством выпускного клапана 15. Дозирующий насос функционирует в соответствии с объемным принципом, то есть при каждом ходе заданный объем, с одной стороны, должен быть всосан и, с другой стороны, должен быть вытеснен посредством выпускного клапана 15. Диафрагма 13 смещается с выполнением колебательного движения посредством эксцентрикового привода, который обеспечивает возвратно-поступательное движение штока 19 вдоль продольной оси. Между упорным кольцом 20 и буртиком диска 24 расположена пружина 23 сжатия, например, цилиндрическая винтовая пружина, которая заставляет упорное кольцо 20 плотно прилегать к эксцентрику при обеспечении принудительной взаимоблокировки в любой момент времени. На фазе перемещения эксцентрика вперед, то есть при перемещении штока по направлению к дозирующей головке, упорное кольцо вместе со штоком перемещается по направлению к пружине сжатия, в то же время диафрагма 13 вдавливается в дозирующую камеру 16, вследствие чего в дозирующей камере создается повышенное давление, выпускной клапан 15 открывается и среда, подлежащая дозированию, выдавливается в магистраль для дозирования. На фазе перемещения эксцентрика в обратном направлении, то есть при перемещении штока от дозирующей головки, упорное кольцо 20 перемещается в противоположном направлении по отношению к пальцу 8 для регулирования хода посредством сжатой пружины 23 сжатия, которая, например, может быть выполнена в виде цилиндрической винтовой пружины, для повторения перемещения эксцентрика, в результате чего шток 19, соединенный с диафрагмой 13, при его перемещении тянет за собой диафрагму, при этом в дозирующей камере 16 создается пониженное давление, которое вызывает открытие впускного клапана 14, так что среда, подлежащая дозированию, может быть всосана в следующий раз в дозирующую камеру.
Фиг.2 показывает схематический вид дозирующего насоса. В проиллюстрированном варианте осуществления силу, действующую на вытесняющий элемент, рассчитывают исходя из тока I в электродвигателе и напряжения U на электродвигателе и известных характеристик электродвигателя, то есть исходя из известной конструкции передачи.
Фиг.3а схематически показывает изменение во времени крутящего момента (вверху) и перемещения вытесняющего элемента (внизу) в течение промежутка времени хода.
Перемещение вытесняющего элемента является по существу синусоидальным. Во время хода hP нагнетания вытесняющий элемент перемещается от точки минимального отклонения SMIN до точки максимального отклонения SMAX. Во время последующего хода всасывания вытесняющий элемент перемещается от точки максимального отклонения SMAX в обратном направлении до точки минимального отклонения SMIN. Суммарный промежуток Н времени хода состоит из хода hP нагнетания и хода hS всасывания. Если рассматривать крутящий момент, показанный вверху на фиг.3а, будет видно, что крутящий момент изменяется между базовым крутящим моментом М0 и максимальным крутящим моментом М1. Только во время хода hP нагнетания крутящий момент отличается от базового крутящего момента М0. За пределами хода нагнетания электродвигатель не должен обеспечивать приложение какого-либо усилия к среде, подлежащей подаче, так что требуется по существу только базовый крутящий момент М0 из-за потерь на трение. Вытесняющий элемент перемещается обратно в его исходное положение посредством пружинного элемента.
В данном случае изменение крутящего момента во время хода hP нагнетания также является по существу синусоидальным и зависит от характеристик передачи. В начале и в конце хода hP нагнетания усилие, подлежащее приложению, является очень малым вследствие повышающего передаточного отношения. Между началом и концом хода крутящий момент увеличивается до максимального значения М1.
Фиг.3b схематически показывает изменение во времени крутящего момента (вверху) и перемещения вытесняющего элемента (внизу) в течение промежутка времени хода, при этом здесь показана ситуация, в которой выполняется только частичный ход.
Если вытесняющий элемент больше не может быть перемещен назад до точки минимального отклонения SMIN или вследствие того, что регулируемый упор ограничивает длину хода, или вследствие того, что длина хода будет ограничена по другим непрогнозируемым причинам, выполняется только частичный ход. Из схематического изображения перемещения вытесняющего элемента, показанного внизу на фиг.3b, видно, что величина отклонения в данном случае находится между отклонением SA и максимальным отклонением SMAX. Следовательно, ход hP нагнетания и ход hS всасывания значительно уменьшаются по сравнению с ходом нагнетания и ходом всасывания на фиг.3а.
В верхней части фиг.3b также видно, что изменение во времени крутящего момента заметно отличается от показанного на фиг.3а. Следовательно, выводы в отношении длины фактически выполненного хода могут быть сделаны исходя из изменения крутящего момента, и фактическую длину хода можно сравнить с заданной контрольной длиной хода. Если фактическая длина хода не будет такой же, как контрольная длина хода, то в предпочтительном варианте осуществления фактическая длина хода может быть приведена в соответствие с контрольной длиной хода посредством изменения тока в электродвигателе и/или напряжения на электродвигателе. Тем не менее, даже если подобное приведение в соответствие с контрольной длиной хода нежелательно или невозможно, фактическая длина хода может быть определена способом согласно изобретению, исходя из нее может быть рассчитан дозируемый объем, и может быть выполнено сравнение последнего с контрольным дозируемым объемом. В этом случае, возможно, частота вращения электродвигателя должна быть увеличена для компенсации уменьшенного дозируемого объема на ход.
Также возможно обнаружение закупорки. В то время как в известных вариантах осуществления датчик положения должен определять положение вытесняющего элемента, и в этом случае вывод о закупорке, которая возникла при некоторых обстоятельствах, может быть сделан исходя из данного положения, вариант осуществления в соответствии с изобретением обеспечивает то, что насос будет выключен, если крутящий момент, который должен быть подан электродвигателем, превысит заданную предельную величину. Следовательно, отключение при закупорке согласно изобретению при некоторых обстоятельствах может предотвратить повреждение электродвигателя.
Следует понимать, что обнаружение закупорки также может быть таким, что предположение о ситуации закупорки будет приниматься, когда заданное предельное значение будет превышено в заданный момент времени или в течение периода, превышающего заданный период. Также существует возможность того, что заданное предельное значение будет получено исходя из положения эксцентрика, то есть существует возможность адаптации заданного предельного значения таким образом, что оно будет переменным/изменяться во времени.
Неполный ход всасывания может быть определен таким же образом. Фиг.4а схематически показывает изменение во времени крутящего момента (вверху) и перемещения вытесняющего элемента (внизу). Сплошная линия соответствует конфигурации, показанной на фиг.3а. Если в данном случае достаточное количество среды, подлежащей подаче, не может проходить в камеру выдачи по каким-либо причинам при ходе всасывания, вытесняющий элемент не сможет следовать за эксцентриком, но будет «отрываться» от него. Данная ситуация показана пунктирной линией на фиг.4а. Вместо следования за перемещением эксцентрика дозирующая камера заполняется только постепенно, так что эксцентрик уже снова будет перемещаться в направлении его максимального отклонения до заполнения дозирующей камеры. В результате этого ход hP нагнетания укорачивается, как показано на фиг.4а. Следовательно, варьирование крутящего момента также изменяется, как также показано пунктирной линией.
Фиг.4b показывает ту же ситуацию в случае частичного хода. Из сдвига tV во времени можно сделать вывод о том, что произошел неполный ход всасывания, и соответствующие меры, если требуется, могут быть приняты, чтобы тем не менее поддержать дозирование, или может быть выдан соответствующий сигнал об ошибке.
Кроме того, способ в соответствии с изобретением обеспечивает возможность обнаружения проскальзывания при перемещении во время хода и, если требуется, немедленного стабилизационного регулирования также в пределах промежутка времени хода. В то время как обычно частоту вращения определяют посредством измерения хода и частоту вращения, возможно, адаптируют для полного хода, в предпочтительном варианте осуществления предусмотрено то, что крутящий момент будет адаптирован в соответствии с увеличивающимся проскальзыванием в пределах хода нагнетания и всасывания.
В целях иллюстрации фиг.5 показывает зависимость частоты вращения от времени для известных электродвигателей (сплошная линия) и для электродвигателя, регулируемого посредством способа в соответствии с изобретением (пунктирная линия). Несмотря на то, что частота вращения периодически падает из-за увеличенной нагрузки в течение продолжительности периода в известных электродвигателях, частота вращения остается постоянной при регулировании согласно изобретению. Для достижения этого крутящий момент электродвигателя должен быть изменен в соответствующий момент времени в пределах хода.
Данная мера обеспечивает уменьшение длины хода нагнетания, а также регулирование продолжительности периода хода до ее идеального значения, в то время как длина хода нагнетания и промежуток времени хода будут увеличиваться по протяженности вследствие уменьшения частоты вращения.
Следовательно, способ в соответствии с изобретением обеспечивает возможность поддержания постоянной выдаваемой дозы даже при высокой нагрузке, которая в противном случае привела бы к уменьшению частоты вращения.
Следовательно, способ в соответствии с изобретением обеспечивает возможность получения значения гидравлического давления, то есть рабочего давления, исходя из крутящего момента. Таким образом, существует возможность, например, определить крутящий момент, создаваемый электродвигателем, и сравнить его с контрольным крутящим моментом, и при отклонении фактического крутящего момента от контрольного крутящего момента, например, более чем на 30% остановить насос для предотвращения перегрузки и, следовательно, защитить привод от саморазрушения.
Как уже было указано, ход нагнетания и всасывания предусматривает изгибание вытесняющей диафрагмы, так что дозируемый объем зависит от рабочего давления.
Если способ в соответствии с изобретением обеспечивает возможность определения рабочего давления исходя из основных параметров электродвигателя, погрешность дозирования может быть исправлена в зависимости от установленного рабочего давления. Дополнительное преимущество способа согласно изобретению заключается в том, что в принципе может быть задана любая кривая перемещения вытесняющего элемента. Таким образом, например, дозирование и всасывающий впуск могут быть осуществлены при постоянной уменьшенной скорости/частоте вращения за счет того, что изменение частоты вращения компенсируется исходя из угла отклонения эксцентрика, в результате чего осуществляется равномерное дозирование и уменьшается потребная максимальная выходная мощность электродвигателя. Кроме того, существует возможность реализации того, что с помощью электронных средств будет оказано содействие всасывающему впуску при первом заполнении всасывающей впускной магистрали и дозирующей головки (в начале работы), если, например, электродвигатель будет функционировать в режиме хода маятника, и полная длина хода будет достигаться в ситуации всасывающего впуска.
Кроме того, существует возможность приведения электродвигателя в действие при ориентированной на потребности взаимосвязи в любой момент времени посредством предсказуемой адаптации рабочих параметров электродвигателя на длине хода, поскольку известно увеличение крутящего момента, обусловленное эксцентриком. Таким образом, электродвигатель может функционировать с обеспечением большей экономии энергии.
Известно, что может происходить кавитация, приводящая к неполному всасывающему впуску и увеличенному изнашиванию материала, например, в клапанах. Описанная оценка изменения усилия и/или соответствующих перемещений обеспечивает возможность обнаружения кавитации в ходе всасывания, и существует возможность немедленного принятия контрмер, например, таких как плавное регулирование скорости всасывающего впуска.
Перечень ссылочных позиций
1 Корпус эксцентрикового привода
2 Приводной электродвигатель
4 Нижняя плита
7 Регулировочный элемент
8 Палец для регулирования хода
10 Линии передачи сигналов управления
11 Понижающая передача
12 Дозирующая головка
13 Диафрагма
14 Впускной клапан
15 Выпускной клапан
16 Дозирующая камера
17 Вал эксцентрика
18 Продольная ось
19 Шток
20 Упорное кольцо
22 Держатель эксцентрикового привода
23 Пружина сжатия
24 Упорный диск
27 Направляющая втулка
29 Корпус электронного устройства управления
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЭКСПЛУАТАЦИИ ДОЗИРУЮЩЕГО УСТРОЙСТВА | 2012 |
|
RU2584049C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ДЕГАЗАЦИИ НАГНЕТАТЕЛЬНОГО ПРОСТРАНСТВА ДОЗИРОВОЧНОГО НАСОСА | 2009 |
|
RU2490515C2 |
| НАСОС | 1993 |
|
RU2072448C1 |
| СПОСОБ ЭКСПЛУАТАЦИИ ДОЗИРУЮЩЕГО УСТРОЙСТВА | 2013 |
|
RU2607120C2 |
| Мембранный дозировочный насос | 1990 |
|
SU1763711A1 |
| Объемный дозирующий насос | 1975 |
|
SU662745A1 |
| Гидроприводной дозирующий насос | 1980 |
|
SU885600A1 |
| СПОСОБ УПРАВЛЕНИЯ И КОНТРОЛЯ ПРОИЗВОДИТЕЛЬНОСТИ ПЛУНЖЕРНОГО ДОЗИРОВОЧНОГО НАСОСА И УСТРОЙСТВО ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2333463C2 |
| ПРИБОР ДЛЯ УХОДА ЗА БЕЛЬЕМ С ДОЗИРУЮЩЕЙ СИСТЕМОЙ | 2016 |
|
RU2678559C1 |
| Гидроприводной дозирующий насос | 1980 |
|
SU885599A1 |

Изобретение относится к способу управления дозирующим насосом и/или регулирования дозирующего насоса, содержащего приводной электродвигатель, имеющий вал, приводимый в движение электродвигателем, и вытесняющий элемент, расположенный в дозирующей головке, в котором вращательное движение вала преобразуется в колебательное движение вытесняющего элемента. Для создания способа управления и/или регулирования дозирующего насоса измеряют по меньшей мере один рабочий параметр электродвигателя, предпочтительно напряжение U или ток I в электродвигателе. Производят расчет по меньшей мере одного регулируемого параметра исходя из измеренных рабочих параметров. Регулируемый параметр, представляющий собой фактический крутящий момент MACTUAL электродвигателя и фактический магнитный поток ФACTUAL в электродвигателе, сравнивают с заданным ориентирующим параметром, представляющим собой по меньшей мере одну заданную стандартную функцию, выдают сигнал сравнения, характеризующий степень подобия между регулируемым параметром и ориентирующим параметром. Если степень подобия принимает значение в заданном диапазоне значений, сигнал сравнения используют в качестве сигнала индикации состояния. Способ может быть реализован без датчика положения на штоке и может задать режим работы насоса при дозировании с высоким уровнем точности. 2 н. и 10 з.п. ф-лы, 7 ил.
1. Способ управления дозирующим насосом и/или регулирования дозирующего насоса, причем дозирующий насос содержит приводной электродвигатель, предпочтительно асинхронный электродвигатель, имеющий вал, приводимый в движение электродвигателем, и вытесняющий элемент, расположенный в дозирующей головке, причем вращательное движение вала преобразуется в колебательное движение вытесняющего элемента, при этом вытесняющий элемент, взаимодействуя попеременно с выпускным и впускным клапанами, обеспечивает выполнение хода нагнетания насоса (хода всасывания) и, таким образом, подачу среды, подлежащей дозированию,
отличающийся тем, что согласно способу
измеряют по меньшей мере один рабочий параметр электродвигателя, предпочтительно напряжение (U) на электродвигателе или ток (I) в электродвигателе,
исходя из измеренных рабочих параметров электродвигателя и, возможно, дополнительных известных характеристик электродвигателя, рассчитывают по меньшей мере один регулируемый параметр, представляющий собой фактический крутящий момент MACTUAL электродвигателя и фактический магнитный поток ФACTUAL в электродвигателе,
по меньшей мере один регулируемый параметр из изменяющегося во времени фактического крутящего момента MACTUAL, рассчитанного таким образом, и изменяющегося во времени фактического магнитного потока ФACTUAL в электродвигателе сравнивают с заданным ориентирующим параметром, представляющим собой по меньшей мере одну заданную стандартную функцию,
выдают сигнал сравнения, характеризующий степень подобия между регулируемым параметром и ориентирующим параметром, причем если степень подобия принимает значение в заданном диапазоне значений, сигнал сравнения используют в качестве сигнала индикации состояния.
2. Способ по п. 1, отличающийся тем, что в качестве ориентирующего параметра используют контрольный крутящий момент MLIM, и сигнал индикации состояния и/или управляющий сигнал выдают, если регулируемый параметр отклоняется от ориентирующего параметра более чем на заданную разность крутящих моментов, при этом ориентирующий параметр предпочтительно варьируется с течением времени.
3. Способ по п. 1 или 2, отличающийся тем, что измеряют в качестве регулируемого параметра фактическую частоту вращения электродвигателя, предпочтительно множество раз, в частности предпочтительно по меньшей мере пять раз, во время вращения электродвигателя или рассчитывают исходя из рабочих параметров электродвигателя, предпочтительно исходя из фактического крутящего момента MACTUAL электродвигателя и фактического магнитного потока ФACTUAL в электродвигателе, и разность фактической частоты вращения электродвигателя и заданной контрольной частоты вращения электродвигателя выдают в качестве сигнала сравнения, и сигнал сравнения используют в качестве регулирующего сигнала для адаптации тока I в электродвигателе и/или напряжения U на электродвигателе для настройки фактической частоты вращения электродвигателя в соответствии с контрольной частотой вращения электродвигателя.
4. Способ по п. 3, отличающийся тем, что дозирующим насосом управляют и/или дозирующий насос регулируют при наличии передачи, предназначенной для преобразования вращательного движения в поступательное движение, которая обеспечивает соединение ведомого вала приводного вала электродвигателя с вытесняющим элементом, при этом передача предпочтительно имеет эксцентрик, который перемещается по контактному элементу, соединенному с вытесняющим элементом, так что при вращении вала эксцентрик обеспечивает перемещение вытесняющего элемента в направлении дозирующей головки и, следовательно, может обеспечить выполнение хода нагнетания.
5. Способ по п. 4, отличающийся тем, что в качестве ориентирующего параметра используют заданную контрольную частоту вращения электродвигателя, при этом контрольная частота вращения электродвигателя представляет собой периодическую функцию, имеющую продолжительность периода, соответствующую продолжительности периода работы вытесняющего элемента.
6. Способ по п. 5, отличающийся тем, что контрольную частоту вращения электродвигателя устанавливают с учетом характеристики передачи таким образом, что поступательное движение осуществляется по существу с постоянной скоростью.
7. Способ по п. 1 или 2, отличающийся тем, что в качестве регулируемого параметра рассчитывают фактическое намагничивание в электродвигателе предпочтительно множество раз, в частности предпочтительно по меньшей мере пять раз, во время вращения электродвигателя исходя из фактического крутящего момента MACTUAL и, возможно, исходя из дополнительных рабочих параметров электродвигателя и/или известных характеристик электродвигателя, и заданное контрольное намагничивание в электродвигателе выбирают в качестве ориентирующего параметра, и разность регулируемого параметра и направляющего параметра выдают в качестве сигнала сравнения, и сигнал сравнения используют в качестве регулирующего сигнала для адаптации тока (I) в электродвигателе и/или напряжения (U) на электродвигателе для приведения фактического намагничивания в электродвигателе в соответствие с контрольным намагничиванием в электродвигателе, при этом контрольное намагничивание в электродвигателе предпочтительно представляет собой периодическую функцию с продолжительностью периода, которая соответствует продолжительности периода работы вытесняющего элемента.
8. Способ по п. 1 или 2, отличающийся тем, что вытесняющий элемент дозирующего насоса имеет, по меньшей мере, частично упругую диафрагму, а дозируемое количество рассчитывают в качестве регулируемого параметра, исходя из изменяющегося во времени фактического крутящего момента MACTUAL электродвигателя и, возможно, фактического магнитного потока ФACTUAL в электродвигателе с учетом дополнительных характеристик электродвигателя, при этом принимают во внимание обусловленное изгибанием упругой диафрагмы ожидаемое влияние на дозируемое количество, и разность фактического дозируемого количества и заданного контрольного дозируемого количества выдают в качестве сигнала сравнения и используют в качестве регулирующего сигнала для адаптации тока (I) в электродвигателе и/или напряжения (U) на электродвигателе для приведения фактического дозируемого количества в соответствие с контрольным дозируемым количеством.
9. Способ по п. 1 или 2, отличающийся тем, что фактическую длину хода вытесняющего элемента рассчитывают в качестве регулируемого параметра исходя из фактического крутящего момента MACTUAL и фактического магнитного потока ФACTUAL, и разность фактической длины хода и заданной контрольной длины хода выдают в качестве сигнала сравнения, при этом сигнал сравнения предпочтительно используют в качестве регулирующего сигнала для адаптации тока (I) в электродвигателе и/или напряжения (U) на электродвигателе для приведения фактической длины хода в соответствие с контрольной длиной хода.
10. Способ по п. 1 или 2, отличающийся тем, что положение штока рассчитывают в качестве регулируемого параметра исходя из измеренных рабочих параметров электродвигателя и, возможно, дополнительных известных характеристик электродвигателя.
11. Дозирующий насос, содержащий приводной электродвигатель, имеющий вал, приводимый в движение электродвигателем, и вытесняющий элемент, расположенный в дозирующей головке, причем вращательное движение вала преобразуется в колебательное движение вытесняющего элемента посредством передачи, и вытесняющий элемент, взаимодействуя попеременно с выпускным и впускным клапанами, обеспечивает выполнение хода насоса (хода нагнетания) и хода всасывания и, таким образом, подачу среды, подлежащей дозированию, отличающийся тем, что дозирующий насос имеет управляющее и/или регулирующее устройство для реализации способа по любому из пп. 1-10.
12. Дозирующий насос по п. 11, отличающийся тем, что насос выполнен с возможностью работы в режиме хода маятника, то есть направление вращения электродвигателя может изменяться на противоположное для окончания хода всасывания или хода нагнетания.
| ПЛУНЖЕРНЫЙ ДОЗИРОВОЧНЫЙ АГРЕГАТ | 0 |
|
SU291049A1 |
| Устройство для испытания на герметичность полых изделий | 1946 |
|
SU78516A1 |
| Объемный дозировочный насос | 1975 |
|
SU562672A1 |
| DE202005013090U1, 04.01.2007 | |||

