Область техники
[0001] Настоящее изобретение относится к усовершенствованию амортизирующего устройства железнодорожного вагона.
Уровень техники
[0002] Взятое в качестве известного примера обычное амортизирующее устройство железнодорожного вагона размещено между кузовом и тележкой железнодорожного вагона и использовано для подавления вибрации в направлении налево-направо относительно направления перемещения.
[0003] В заявке на патент Японии JP 2010-65797A раскрыто амортизирующее устройство железнодорожного вагона, содержащее: цилиндр, соединенный или с тележкой или с кузовом железнодорожного вагона; поршень, вставленный в цилиндр с возможностью свободного скольжения; стержень, вставленный в цилиндр и соединенный с другим элементом, выбранным из тележки и кузова, и с поршнем; камеру со стороны стержня и камеру со стороны поршня, определенные внутри цилиндра поршнем; резервуар, хранящий жидкость, подаваемую в цилиндр; первый клапан открытия/закрытия, размещенный на полпути на первом канале, соединяющем камеру со стороны стержня с камерой со стороны поршня; второй клапан открытия/закрытия, размещенный на полпути на втором канале, соединяющем камеру со стороны поршня с резервуаром; насос, подающий рабочую жидкость на масляной основе в камеру со стороны стержня; выпускной канал, соединяющий камеру со стороны стержня с резервуаром; и регулируемый предохранительный клапан, размещенный на полпути на выпускном канале и имеющий поддающееся изменению давление открытия клапана. Посредством управления насосом, первым клапаном открытия/закрытия, вторым клапаном открытия/закрытия и регулируемым предохранительным клапаном привод может вырабатывать усилие и в направлении расширения и в направлении сжатия, и происходит подавление вибрации кузова этим усилием.
Раскрытие изобретения
[0004] В этом амортизирующем устройстве железнодорожного вагона усилие, которое необходимо выработать приводом, определено как задаваемое посредством команды значение усилия, а вибрация кузова подавлена посредством управления усилием привода в соответствии с задаваемым посредством команды значением усилия.
[0005] Задаваемое посредством команды значение усилия вычислено при использовании коэффициента усиления системы управления и т.п. Например, при использовании управления типа Skyhook задаваемое посредством команды значение усилия вычислено посредством умножения усилия Skyhook, служащего в качестве коэффициента усиления системы управления, на скорость кузова в боковом направлении. Следовательно, задаваемое посредством команды значение усилия определено посредством измерения величины, такой как ускорение или скорость, и умножения этой величины на коэффициент усиления системы управления.
[0006] В большинстве случаев перемещение железнодорожного вагона происходит вдоль маршрута, содержащего во время одного коммерческого маршрута и открытые участки, то есть нетуннельные участки, и туннельные участки. Режим вибрации кузова различен на открытом участке и на туннельном участке. Таким образом, в течение одного коммерческого маршрута железнодорожный вагон должен проехать через участки с различными режимами вибрации. В пределах открытого участка режим вибрации кузова также отличен между прямолинейным участком и криволинейным участком.
[0007] Следовательно, при управлении приводом посредством вычисления задаваемого посредством команды значения усилия с использованием фиксированного коэффициента усиления системы управления задаваемое посредством команды значение усилия, возможно, не является подходящим для режима вибрации, и в результате не обеспечена возможность эффективного подавления вибрации кузова, что означает невозможность поддержания благоприятного пассажирского комфорта. Поэтому в обычном амортизирующем устройстве железнодорожного вагона информация, указывающая на положение железнодорожного вагона на маршруте, и информация, указывающая на тип участка для текущего участка маршрута, получена из контрольного устройства транспортного средства и т.п. железнодорожного вагона. Оптимальное значение коэффициента усиления системы управления затем выбрано посредством обращения к таблице, в которой полученная информация связана с коэффициентом усиления системы управления.
[0008] Для получения таким образом информации, указывающей на тип участка для текущего участка маршрута и на положение железнодорожного вагона на маршруте, от контрольного устройства транспортного средства или аналогичного устройства, необходим интерфейс, соединяющий амортизирующее устройство железнодорожного вагона с контрольным устройством транспортного средства. Кроме того, в железнодорожном вагоне, не содержащем развитого средства передачи информации о состоянии транспортного средства, например, в железнодорожном вагоне, используемом на узкоколейной железной дороге, вышеупомянутая информация не может быть получена, и амортизирующее устройство железнодорожного вагона не может быть легко установлено.
[0009] Это изобретение было разработано с учетом описанных выше проблем, причем его цель состоит в выполнении амортизирующего устройства железнодорожного вагона, способного определять тип участка для текущего участка маршрута железнодорожного вагона, не получая информацию, указывающую на положение железнодорожного вагона на маршруте и на тип участка для текущего участка маршрута, от контрольного устройства транспортного средства.
[0010] Согласно одному аспекту настоящего изобретения выполнено амортизирующее устройство железнодорожного вагона, определяющее усилие, выводимое приводом в качестве задаваемого посредством команды значения усилия, и подавляющее вибрацию кузова посредством управления приводом. Привод содержит: цилиндр, соединенный или с тележкой или с кузовом железнодорожного вагона; поршень, вставленный в цилиндр с возможностью свободного скольжения; стержень, вставленный в цилиндр и соединенный с другим элементом, выбранным из тележки и кузова, и с поршнем; камеру со стороны стержня и камеру со стороны поршня, определенные внутри цилиндра поршнем. Амортизирующее устройство железнодорожного вагона содержит: резервуар, выполненный с возможностью хранения жидкости, подаваемой в цилиндр и выпускаемой из цилиндра; первый клапан открытия/закрытия, размещенный на первом канале, соединяющем камеру со стороны стержня с камерой со стороны поршня, и выполненный с возможностью открытия и закрытия первого канала; второй клапан открытия/закрытия, размещенный на втором канале, соединяющем камеру со стороны поршня с резервуаром, выполненный с возможностью открытия и закрытия второго канала; насос, выполненный с возможностью подачи жидкости из резервуара в камеру со стороны стержня; двигатель, выполненный с возможностью поворота с фиксированной скоростью поворота для приведения насоса в поворотное движение; и блок определения участка, выполненный с возможностью определения, к какому типу участка (открытому или туннельному) принадлежит текущий участок маршрута железнодорожного вагона, на основании различия скоростей между заданной скоростью поворота и реальной скоростью поворота железнодорожного вагона.
[0011] Подробности, а также другие особенности и преимущества настоящего изобретения сформулированы в описании ниже и показаны на сопровождающих чертежах.
Краткое описание чертежей
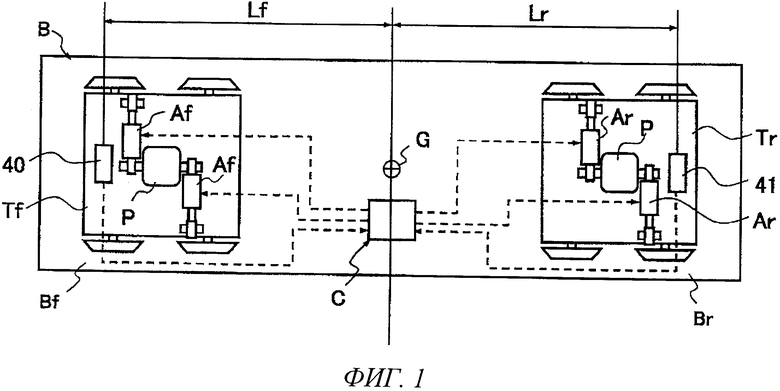
[0012] На фиг.1 показан вид сверху конфигурации железнодорожного вагона с установленным амортизирующим устройством железнодорожного вагона согласно одному из вариантов реализации настоящего изобретения.
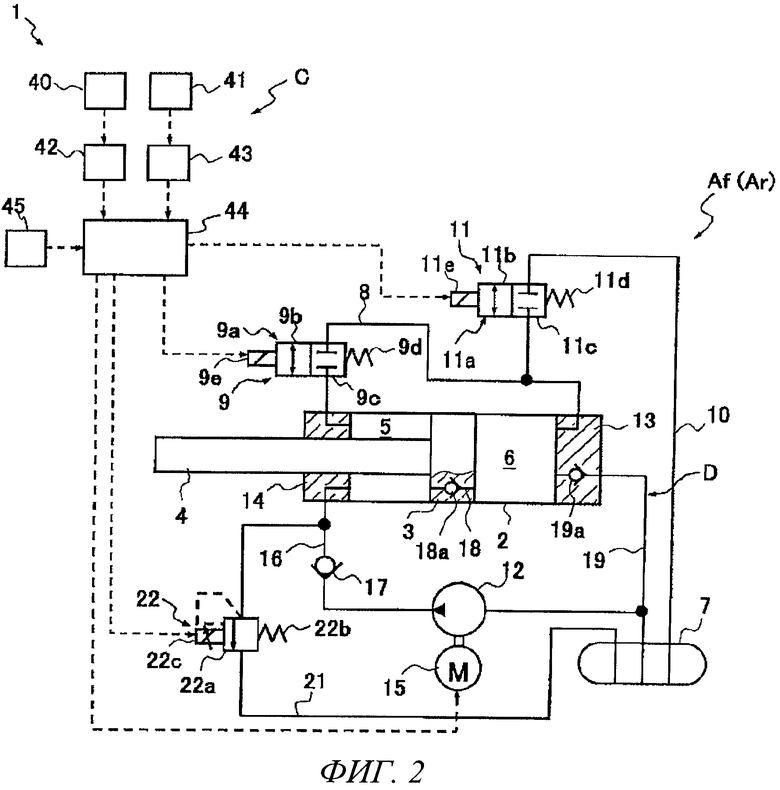
На фиг.2 показан детализованный вид амортизирующего устройства железнодорожного вагона согласно этому варианту реализации настоящего изобретения.
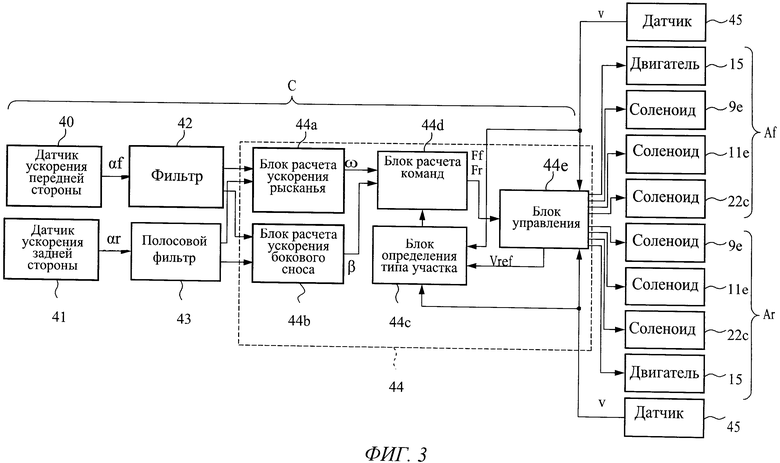
На фиг.3 показана схема блока управления управляющего устройства, выполненного в амортизирующем устройстве железнодорожного вагона согласно этому варианту реализации настоящего изобретения.
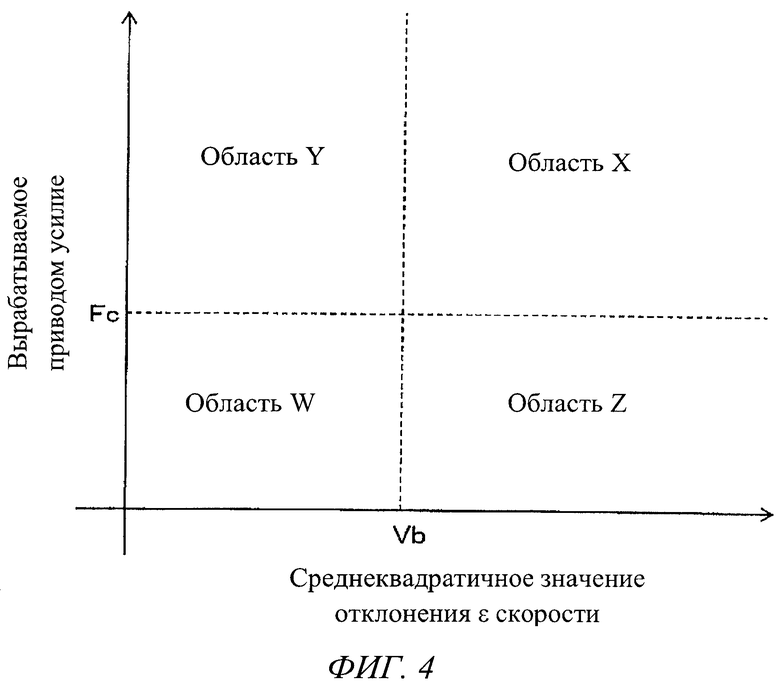
На фиг 4. показан вид, иллюстрирующий суть определения типа участка, выполняемого блоком определения типа участка.
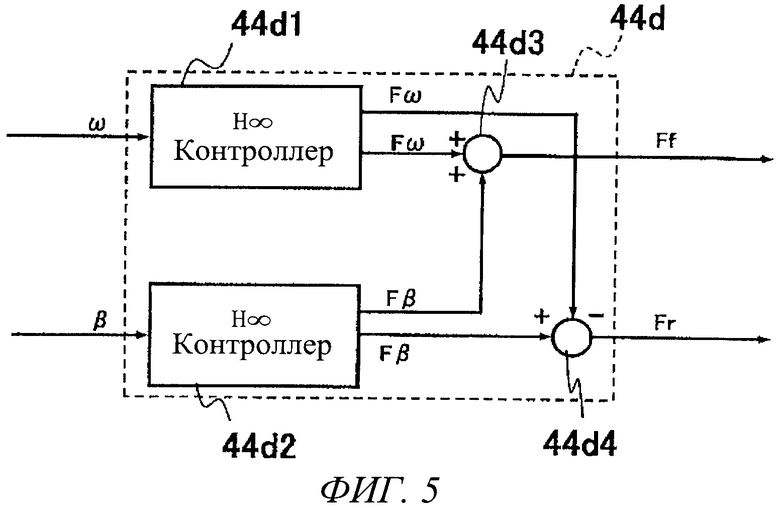
На фиг.5 показана схема управления блоком расчета команд управляющего устройства, выполненного в амортизирующем устройстве железнодорожного вагона согласно этому варианту реализации настоящего изобретения.
Описание вариантов реализации изобретения
[0013] Ниже будет описано амортизирующее устройство 1 железнодорожного вагона согласно одному из вариантов реализации настоящего изобретения со ссылками на прилагаемые чертежи.
[0014] Амортизирующее устройство 1 железнодорожного вагона использовано в качестве амортизирующего устройства для кузова В железнодорожного вагона. Как показано на фиг.1, амортизирующее устройство 1 железнодорожного вагона содержит: привод Af передней стороны, размещенный между тележкой Tf передней стороны и кузовом В, привод Ar задней стороны, размещенный между тележкой Tr задней стороны и кузовом В, и управляющее устройство С, активно управляющее этими двумя приводами Ar, Af. Амортизирующее устройство 1 железнодорожного вагона определяет усилие, выводимое приводами Af, Ar в качестве задаваемого посредством команды значения усилия, и управляет приводами Af, Ar для подавления вибрации кузова В.
[0015] привод Af и привод Ar соответствующим образом выполнены в виде пар. Передние и задние приводы Af, Ar соединены со штырями Р, свешивающимися вниз от кузова В железнодорожного вагона, чтобы быть размещенными в виде соответствующих параллельных пар между кузовом В и передними и задними тележками Tf, Tr.
[0016] В основном, передний и задний приводы Af, Ar активно управляются для подавления вибрации в горизонтальном боковом направлении относительно направления перемещения кузова В. В этом случае, управляющее устройство С выполняет активное управление для управления передними и задними приводами Af, Ar таким образом, что вибрация в боковом направлении кузова В подавлена.
[0017] Конкретнее, при выполнении управления с целью подавления вибрации кузова В управляющее устройство С обнаруживает ускорение af в боковом направлении передней части Bf кузова В в горизонтальном боковом направлении относительно направления перемещения транспортного средства и ускорение ar в боковом направлении задней части Br кузова В в горизонтальном боковом направлении относительно направления перемещения транспортного средства. Управляющее устройство С затем вычисляет ускорение ω рыскания, представляющее собой угловое ускорение относительно центра G кузова непосредственно над передней и задней тележками Tf, Tf, на основе обнаруженного ускорения в боковом направлении af и ускорения ar в боковом направлении. Управляющее устройство С также вычисляет ускорение β бокового сноса, представляющее собой ускорение в горизонтальном боковом направлении центра G кузова, на основе обнаруженного ускорения af в боковом направлении и ускорения ar в боковом направлении. Управляющее устройство С затем вычисляет задаваемые посредством команды значения усилий Ff, Fr, представляющих собой усилия, вырабатываемые индивидуально передним и задним приводами Af, Ar на основе расчетного ускорения ω рыскания и ускорения β бокового сноса. Управляющее устройство С затем выполняет управление с обратной связью таким образом, что усилие, соответствующее задаваемым посредством команды значениям Ff, Fr усилия, выработано передними и задними приводами Af, Ar, и при этом происходит подавление вибрации в боковом направлении кузова В.
[0018] На фиг.1 представлено по два привода Af и два привода Ar, причем приводы Af, Ar управляются лишь одним управляющим устройством С. Вместо этого, однако, одно управляющее устройство С может быть предусмотрено для каждого из приводов Af, Ar.
[0019] Затем, со ссылками на фиг.2, будет описана специфическая конфигурация амортизирующего устройства 1 железнодорожного вагона.
[0020] Соответствующие амортизирующие устройства 1 железнодорожного вагона, предназначенные для расширения и сокращения передних и задних приводов Af, Ar, выполнены аналогичным образом и, таким образом, во избежание дублирующего описания, ниже будет описана только конфигурация амортизирующего устройства 1 железнодорожного вагона, содержащая привод Af с передней стороны, а конкретное описание амортизирующего устройства 1 железнодорожного вагона, содержащего привод Ar с задней стороны, будет опущено.
[0021] Привод Af содержит цилиндр 2, соединенный или с тележкой Tf или с кузовом В железнодорожного вагона, поршень 3, вставленный в цилиндр 2 с возможностью свободного скольжения, стержень 4, вставленный в цилиндр 2 и соединенный с другим элементом, выбранным из тележки Tf и кузова В, и с поршнем 3, и камеру 5 со стороны стержня и камеру 6 со стороны поршня, определенные внутри цилиндра 2 поршнем 3. привод Af представляет собой один привод типа стержня. Амортизирующее устройство 1 железнодорожного вагона также содержит резервуар 7, выполненный с возможностью хранения рабочей жидкости на масляной основе в качестве жидкости, подаваемой в цилиндр 2 и выпускаемой из цилиндра 2, первый клапан 9 открытия/закрытия, размещенный на первом канале 8, соединяющем камеру 5 со стороны стержня с камерой 6 со стороны поршня, и выполненный с возможностью открытия и закрытия первого канала 8, второй клапан 11 открытия/закрытия, размещенный на втором канале 10, соединяющем камеру 6 со стороны поршня с резервуаром 7, выполненный с возможностью открытия и закрытия второго канала 10, насос 12, подающий рабочую жидкость на масляной основе из резервуара 7 в камеру 5 со стороны стержня, и двигатель 15, производящий поворот с фиксированной скоростью поворота для приведения насоса 12 в поворотное движение. Рабочая жидкость на масляной основе загружена в камеру 5 со стороны стержня и камеру 6 со стороны поршня, и газ загружен в резервуар 7 в дополнение к рабочей жидкости на масляной основе. Следует отметить, что нет никакой особой необходимости устанавливать резервуар 7 при повышенном давлении посредством сжатия загруженного в него газа.
[0022] Привод Af выполняет операцию расширения посредством приведения насоса 12 в такое состояние, при котором первый канал 8 приведен в открытое состояние первым клапаном 9 открытия /закрытия, а второй клапан 11 открытия/закрытия закрыт.Кроме того, привод Af выполняет операцию сжатия посредством приведения насоса 12 в такое состояние, при котором второй канал 10 приведен в открытое состояние вторым клапаном 11 открытия /закрытия, а первый клапан 9 открытия/закрытия закрыт.
[0023] Соответствующие части привода Af будут теперь описаны подробно.
[0024] Цилиндр 2 выполнен в виде трубы. Один конец (правый конец на фиг.2) цилиндра 2 закрыт крышкой 13, а кольцевая направляющая 14 стержня прикреплена к другому концу (левому концу на фиг.2). Стержень 4, вставленный в цилиндр 2 с возможностью свободного перемещения, вставлен в направляющую 14 стержня с возможностью свободного скольжения. Стержень 4 выступает вовне цилиндра 2 с одного конца, а другой конец связан с поршнем 3, вставленным в цилиндр 2 с возможностью свободного скольжения.
[0025] Внешняя периферия стержня 4 уплотнена относительно направляющей 14 стержня элементом уплотнения, не показанным на фигурах. В результате внутренность цилиндра 2 поддержана в воздухонепроницаемом состоянии. Как описано выше, рабочая жидкость на масляной основе загружена в камеру 5 со стороны стержня и в камеру 6 со стороны поршня, определенных внутри цилиндра 2 поршнем 3. Другая подходящая для привода жидкость может быть использована в качестве жидкости, загружаемой в цилиндр 2 вместо рабочей жидкости на масляной основе.
[0026] В приводе Af стержень 4 выполнен таким образом, что площадь его участка равна половине площади участка поршня 3. Другими словами, площадь поверхности поршня 3, на которую воздействует давление, со стороны камеры 5 со стороны стержня, равна половине площади поверхности поршня 3, на которую воздействует давления со стороны камеры 6 со стороны поршня. Таким образом, при установке идентичного давления в камере 5 со стороне стержня во время операции расширения и операции сжатия, одинаковое усилие будет выработано и во время расширения и во время сжатия. Кроме того, количество рабочей жидкости на масляной основе, поданной в камеру 5 со стороны стержня и выпущенной из нее относительно смещения привода Af, одинаково и со стороны расширения и со стороны сжатия.
[0027] Точнее, при выполнении приводом Af операции расширения, камера 5 со стороны стержня и камера 6 со стороны поршня связаны через первый канал 8 таким образом, что давление рабочей жидкости на масляной основе в камере 5 со стороны стержня и давление рабочей жидкости на масляной основе в камере 6 со стороны поршня равны. В результате выработано усилие, получаемое посредством умножения давления рабочей жидкости на масляной основе на разность площадей, на которые воздействует давление, в поршне 3 между камерой 5 со стороны стержня и камерой 6 со стороны поршня. С другой стороны, при выполнении приводом Af операции сжатия связь между камерой 5 со стороны стержня и камерой 6 со стороны поршня отсутствует, так что камера 6 со стороны поршня соединена с резервуаром 7 через второй канал 10. В результате выработано усилие, получаемое посредством умножения давления рабочей жидкости на масляной основе в камере 5 со стороны стержня на площадь, на которую воздействует давление в камере 5 со стороны стержня в поршне 3. Таким образом, и во время расширения и во время сжатия, усилие, вырабатываемое приводом Af, принимает значение, полученное посредством умножения давления рабочей жидкости на масляной основе в камере 5 со стороны стержня 5 на половину площади участка поршня 3. Таким образом, усилие со стороны привода Af может управляться посредством управления давлением в камере 5 со стороны стержня и во время операции расширения и во время операции сжатия.
[0028] В это время в приводе Af площадь поверхности, на которую воздействует давление со стороны поршня 3 с камерой 5 со стороны стержня, установлена равной половине площади поверхности, на которую воздействует давление со стороны камеры 6 со стороны поршня. Поэтому, при одинаковом усилии, выработанном на стороне расширения и на стороне сжатия, давление в камере 5 со стороны стержня одинаково и на стороне расширения и на стороне сжатия, что упрощает управление. Кроме того, количество рабочей жидкости на масляной основе, подаваемой в камеру 5 со стороны стержня 5 и выпускаемой из него относительно рабочего объема, также идентично, и поэтому идентичный отклик получен и на стороне расширения и на стороне сжатия.
[0029] Следует отметить, что усилие со стороны привода Af на стороне расширения и на стороне сжатия может управляться давлением в камере 5 со стороны стержня, даже при неравенстве площади поверхности, на которую воздействует давление со стороны поршня 3 с камерой 5 со стороны стержня, половине площади поверхности, на которую воздействует давление со стороны камеры 6 со стороны поршня.
[0030] Свободный конец (левый конец на фиг.2) стержня 4 и крышка 13, закрывающая один конец цилиндра 2, выполнены с элементами прикрепления, не показанными на фигурах, привод Af может быть вставлен между кузовом В и тележкой Tf железнодорожного вагона посредством этих элементов прикрепления.
[0031] Камера 5 со стороны стержня и камера 6 со стороны поршня связаны первым каналом 8. Первый клапан 9 открытия/закрытия размещен на полпути на первом канале 8. Первый канал 8 соединяет камеру 5 со стороны стержня и камеру 6 со стороны поршня на внешней части цилиндра 2, но вместо этого, канал, соединяющий камеру 5 со стороны стержня и камеру 6 со стороны поршня, может быть выполнен в поршне 3.
[0032] Первый клапан 9 открытия/закрытия представляет собой соленоидный клапан открытия/закрытия, содержащий клапан 9а, имеющий положение 9b открытия и положение 9с закрытия, пружину 9d, смещающий клапан 9а к закрытое положение 9с, и соленоид 9е, который при возбуждении переключает клапан 9а в открытое положение 9b, противодействуя пружине 9d. при переключении в открытое положение 9b первый клапан 9 открытия/закрытия открывает первый канал 8 таким образом, что камера 5 со стороны стержня имеет связь с камерой 6 со стороны поршня, при переключении в открытое положение 9с первый клапан 9 открытия/закрытия прерывает связь между камерой 5 со стороны стержня и камерой 6 со стороны поршня.
[0033] Камера 6 со стороны поршня и резервуар связаны вторым каналом 10. Второй клапан 11 открытия/закрытия размещен на полпути на втором канале 10. Второй клапан 11 открытия/закрытия представляет собой соленоидный клапан открытия /закрытия, содержащий клапан 11а, имеющий положение 11b открытия и положение 11с закрытия, пружину 11d, смещающую клапан На в закрытое положение 11с, и соленоид Не, который при возбуждении переключает клапан На в открытое положение 11b, противодействуя пружине 11d. при переключении в открытое положение 11b второй клапан 11 открытия/закрытия открывает второй канал 8 таким образом, что камера 6 со стороны поршня имеет связь с резервуаром 7. при переключении в открытое положение 11c второй клапан 11 открытия/закрытия прерывает связь между камерой 6 со стороны поршня и резервуаром 7.
[0034] Насос 12 управляется двигателем 15. Насос 12 выпускает рабочую жидкость на масляной основе только в одном направлении. Выпускное отверстие насоса 12 связано с камерой 5 со стороны стержня через канал 16 подачи, а впускное отверстие насоса 12 связано с резервуаром 7. при управлении двигателем 15 насос 12 всасывает рабочую жидкость на масляной основе из резервуара 7 и подает эту рабочую жидкость на масляной основе в камеру 5 со стороны стержня.
[0035] Поскольку насос 12 выпускает рабочую жидкость на масляной основе только в одном направлении, не нужна операция переключения направления поворота. Таким образом, не возникает проблема, связанная с изменением выпускаемого объема при переключении направления поворота. Таким образом, недорогой шестеренчатый насос или что-то подобное может быть применено к насосу 12. Кроме того, поворот насоса 12 всегда имеет место в одном и том же направлении, и поэтому двигатель 15, служащий в качестве привода для поворота насоса 12, не требует высокого отклика относительно выключателя поворота. Таким образом, недорогой двигатель также может быть использован в качестве двигателя 15. Контрольный клапан 17, предотвращающий противоток рабочей жидкости на масляной основе из камеры 5 со стороны стержня в насос 12, выполнен на канале 16 подачи.
[0036] В амортизирующем устройстве 1 железнодорожного вагона рабочая жидкость на масляной основе подана от насоса 12 в камеру 5 со стороны стержня при заранее определенном расходе выпускного потока при принуждении привода Af амортизирующего устройства 1 железнодорожного вагона выполнить операцию расширения происходит регулировка давления в камере 5 со стороны стержня посредством открытия первого клапана 9 открытия/закрытия и открытия и закрытия второго клапана 11 открытия/закрытия. С другой стороны, при принуждении привода Af амортизирующего устройства 1 железнодорожного вагона выполнить операцию сжатия происходит регулировка давления в камере 5 со стороны стержня посредством открытия второго клапана 11 открытия/закрытия и открытия и закрытия первого клапана 9 открытия/закрытия. Таким образом, может быть получено усилие, соответствующее описанному выше задаваемому посредством команды значению Ff усилия.
[0037] Во время операции расширения камера 5 со стороны стержня и камера 6 со стороны поршня связаны между собой таким образом, что давление в камере 6 со стороны поршня идентично давлению в камере со стороны стержня 5. Таким образом, в амортизирующем устройстве 1 железнодорожного вагона усилие со стороны привода Af может управляться посредством управления давлением в камере 5 со стороны стержня и во время операции расширения и во время операции сжатия.
[0038] Первый клапан 9 открытия/закрытия и второй клапан 11 открытия/закрытия могут быть регулируемыми предохранительными клапанами с возможностью настройки давления открытия клапана, то есть, выполненными с возможностью открытия и закрытия. В этом случае, усилие со стороны привода Af может быть отрегулировано во время операций расширения и сжатия посредством регулировки соответствующих давлений открытия первого клапана 9 открытия/закрытия и второго клапана 11 открытия/закрытия вместо выполнения на них операций по открытию/закрытию.
[0039] Как описано выше, усилие со стороны привода At может быть отрегулировано, причем для облегчения регулировки усилия амортизирующее устройство 1 железнодорожного вагона содержит выпускной канал 21, соединяющий камеру 5 со стороны стержня с резервуаром 7, и регулируемый предохранительный клапан 22, размещенный на полпути на выпускном канале 21 и обеспечивающий возможность изменения давления открытия клапана.
[0040] Регулируемый предохранительный клапан 22 представляет собой пропорциональный соленоидный предохранительный клапан, содержащий корпус 22а клапана, выполненный в выпускном канале 21, пружину 22b, смещающую корпус 22а клапана для перекрытия выпускного канала 21, и пропорциональный соленоид 22с, который при возбуждении вырабатывает усилие против пружины 22b. Давление открытия клапана регулируемого предохранительного клапана 22 может быть отрегулировано посредством регулировки величины тока, протекающего через пропорциональный соленоид 22с.
[0041] В регулируемом предохранительном клапане 22 давление рабочей жидкости на масляной основе в камере 5 со стороны стержня вверх по течению выпускного канала 21 действует на корпус 22а клапана в качестве управляющего давления, при давление рабочей жидкости на масляной основе, действующем на корпус 22а клапана регулируемого предохранительного клапана 22 и превышающем разгрузочное давление (давление открытия клапана), результирующая сила, оказываемая усилием, выработанным давлением рабочей жидкости на масляной основе в камере 5 со стороны стержня, и усилием, выработанным пропорциональным соленоидом 22с, превышает смещающую силу пружины 22b, которая смещает корпус 22а клапана в направлении, предназначенном для перекрытия выпускного канала 21, вынуждая, таким образом, корпус 22а клапана отходить назад, открывая в результате выпускной канал 21.
[0042] В регулируемом предохранительном клапане 22 происходит увеличение усилия, выработанного пропорциональным соленоидом 22с при увеличении величины тока, подаваемого к пропорциональному соленоиду 22с. Таким образом, при установленной на максимум величине тока, подаваемой к пропорциональному соленоиду 22с, давление открытия клапана достигает минимума и, наоборот, при полном отсутствии тока, подаваемого к пропорциональному соленоиду 22с, давление открытия клапана достигает максимума.
[0043] Таким образом, при наличии выпускного канала 21 и регулируемого предохранительного клапана 22 во время операций расширения и сжатия привода Af давление в камере 5 со стороны стержня идентично давлению открытия клапана регулируемого предохранительного клапана 22. Поэтому давление в камере 5 со стороны стержня может быть легко отрегулировано посредством регулировки давления открытия клапана в регулируемом предохранительном клапане 22.
[0044] Посредством такой регулировки давления открытия клапана в регулируемом предохранительном клапане 22 можно управлять усилием со стороны привода Af. Таким образом, нет никакой необходимости использовать датчик, предназначенный для регулировки усилия со стороны привода Af, нет никакой необходимости открывать и закрывать первый клапан 9 открытия/закрытия и второй клапан 11 открытия/закрытия с высокой скоростью, и нет никакой необходимости использовать регулируемый предохранительный клапан, имеющий функцию открытия и закрытия первого клапана 9 открытия/закрытия и второго клапана 11 открытия/закрытия. В результате амортизирующее устройство 1 железнодорожного вагона может быть выполнено недорого и может быть выполнена устойчивая к сбоям система с точки зрения и аппаратного и программного обеспечения.
[0045] При использовании в качестве регулируемого предохранительного клапана 22 пропорционального соленоидного предохранительного клапана, в котором давление открытия клапана может быть пропорционально изменено в соответствии с величиной приложенного тока, может легко управляться давление открытия клапана. Однако, регулируемый предохранительный клапан 22 не обязательно должен быть выполнен пропорциональным соленоидным предохранительным клапаном, то есть, может быть использован любой предохранительный клапан с возможностью регулировки давления открытия.
[0046] При подаче излишнего входного потока в привод Af в направлении расширения/сжатия таким образом, что давление в камере 5 со стороны стержня превышает давление открытия клапана в регулируемом предохранительном клапане 22 независимо от состояния открытия/закрытия первого клапана 9 открытия/закрытия и второго клапана 11 открытия/закрытия регулируемый предохранительный клапан 22 открывает выпускной канал 21 таким образом, что камера 5 со стороны стержня получает связь с резервуаром 7. В результате давление в камере 5 со стороны стержня сброшено в резервуар 7 и, таким образом, может быть предохранена вся система амортизирующего устройства 1 железнодорожного вагона. Таким образом, система может быть предохранена выпускным каналом 21 и регулируемым предохранительным клапаном 22.
[0047] Амортизирующее устройство 1 железнодорожного вагона содержит цепь D амортизатора. Цепь D амортизатора вынуждает привод Af действовать в качестве амортизатора при одновременном закрытом положении первого клапана 9 открытия/закрытия и второго клапана 11 открытия/закрытия. Цепь D амортизатора содержит канал 18 выпрямления, выполненный в поршне 3 для обеспечения протекания рабочей жидкости на масляной основе только из камеры 6 со стороны поршня в камеру 5 со стороны стержня, и всасывающий канал 19, выполненный для обеспечения протекания рабочей жидкости на масляной основе только из резервуара 7 в камеру 6 со стороны поршня. Кроме того, амортизирующее устройство 1 железнодорожного вагона содержит выпускной канал 21 и регулируемый предохранительный клапан 22 и, таким образом, при использовании привода Af в качестве амортизатора регулируемый предохранительный клапан 22 работает в качестве клапана амортизации.
[0048] Конкретнее, канал 18 выпрямления соединяет камеру 6 со стороны поршня с камерой 5 со стороны стержня, причем контрольный клапан 18а размещен на полпути между ними. Контрольный клапан 18а преобразует канал 18 выпрямления в однонаправленный канал, обеспечивающий возможность протекания рабочей жидкости на масляной основе только из камеры 6 со стороны поршня в камеру 5 со стороны стержня. Всасывающий канал 19, тем временем, соединяет резервуар 7 с камерой 6 со стороны поршня, а контрольный клапан 19а размещен на полпути этой линии. Контрольный клапан 19а преобразует всасывающий канал 19 в однонаправленный канал, обеспечивающий возможность протекания рабочей жидкости на масляной основе только из резервуара 7 в камеру 6 со стороны поршня.
[0049] Следует отметить, что посредством использования контрольного клапана, обеспечивающего возможность протекания рабочей жидкости на масляной основе только из камеры 6 со стороны поршня в камеру 5 со стороны стержня в закрытом положении 9с первого клапана 9 открытия/закрытия, первый канал 8 может также быть использован в качестве канала 18 выпрямления. Кроме того, посредством использования контрольного клапана, обеспечивающего возможность протекания рабочей жидкости на масляной основе только из резервуара 7 в камеру 6 со стороны поршня в закрытом положении 11 с второго клапана 11 открытия/закрытия, второй канал 10 может также быть использован в качестве всасывающего канала 19.
[0050] При наличии цепи D амортизатора, выполненной как описано выше, и при переключении первого клапана 9 открытия/закрытия и второго клапана 11 открытия/закрытия амортизирующего устройства 1 железнодорожного вагона в их соответствующие закрытые положения 9с, 11 с, камера 5 со стороны стержня, камера 6 со стороны поршня и резервуар 7 соединены в ряд посредством канала 18 выпрямления, всасывающего канала 19 и выпускного канала 21. Поскольку канал 18 выпрямления, всасывающий канал 19 и выпускной канал 21 обеспечивают возможность протекания рабочей жидкости на масляной основе только в одном направлении при принуждении привода Af к расширению и сокращению посредством внешней силы, рабочая жидкость на масляной основе, выпущенная из цилиндра 2, возвращена в резервуар 7 через выпускной канал 21, в то время как недостаток рабочей жидкости на масляной основе в цилиндре 2 устранен посредством подачи рабочей жидкости на масляной основе в цилиндр 2 из резервуара 7 через всасывающий канал 19.
[0051] В это время регулируемый предохранительный клапан 22 служит сопротивлением потоку рабочей жидкости на масляной основе, работая, таким образом, в качестве клапана регулировки давления, который подстраивает давление в цилиндре 2 к давлению открытия клапана. В соответствии с этим привод Af действует как пассивный прямоточный амортизатор.
[0052] Во время отказа, в ходе которого не могут быть возбуждены соответствующие компоненты амортизирующего устройства 1 железнодорожного вагона, клапаны 9а, 11а первого клапана 9 открытия/закрытия и второго клапана 11 открытия/закрытия нажаты пружинами 9d, 11d с целью их переключения в их соответствующие закрытые положения 9с, 11с. В это время регулируемый предохранительный клапан 22, действующий как клапан регулирования давления, имеет давление открытия клапана, установленное на максимум. Во время отказа, таким образом, привод Af автоматически работает как пассивный амортизатор.
[0053] Вместо использования регулируемого предохранительного клапана 22 и выпускного канала 21, цепь D амортизатора может быть выполнена отдельно посредством канала, соединяющего камеру 5 со стороны стержня и резервуар 7, и амортизирующего клапана, размещенного посередине канала.
[0054] Чтобы вынудить приводы Af, Ar вырабатывать желательное усилие в направлении расширения, управляющее устройство С поворачивает двигатель 15 для подачи рабочей жидкости на масляной основе от насоса 12 в цилиндр 2, переключает соответствующий первый клапан 9 открытия/закрытия в открытое положение 9b и переключает второй клапан 11 открытия/закрытия в закрытое положение 11с. В результате камера 5 со стороны стержня и камера 6 со стороны поршня соединены друг с другом таким образом, что рабочая жидкость на масляной основе подана сюда от насоса 12 и поршень 3 нажат в направлении расширения (влево на фиг.2). приводы Af, Ar, таким образом, вырабатывают усилие в направлении расширения. В это время приводы Af, Ar вырабатывают усилие в направлении расширения, величина которого получена посредством умножения давления в камере 5 со стороны стержня и в камере со стороны поршня 6 на разность площадей поверхностей, испытывающих воздействие давления, в поршне 3 между стороной с камерой 6 со стороны поршня и стороной с камерой 5 со стороны стержня.
[0055] При давлении в камере 5 со стороны стержня и в камере 6 со стороны поршня, превышающем давление открытия клапана для регулируемого предохранительного клапана 22, происходит открытие регулируемого предохранительного клапана 22 таким образом, что часть рабочей жидкости на масляной основе, поданной из насоса 12, уходит в резервуар 7 через выпускной канал 21. Таким образом, давление в камере 5 со стороны стержня и в камере 6 со стороны поршня управляется посредством давления открытия клапана для регулируемого предохранительного клапана 22, которое определено в соответствии с величиной тока, пропускаемого через регулируемый предохранительный клапан 22.
[0056] С другой стороны, чтобы вынудить приводы Af, Ar вырабатывать желательное усилие в направлении сжатия, управляющее устройство С поворачивает двигатель 15 для подачи рабочей жидкости на масляной основе от насоса 12 в камеру 5 со стороны стержня, переключает первый клапан 9 открытия/закрытия в закрытое положение 9 с и переключает второй клапан 11 открытия/закрытия в открытое положение 11b. В результате камера 6 со стороны поршня и резервуар 7 соединены друг с другом таким образом, что рабочая жидкость на масляной основе подана в камеру 5 со стороны стержня от насоса 12, и в результате поршень 3 нажат в направлении сжатия (направо на фиг.2). приводы Af, Ar, таким образом, вырабатывают усилие в направлении сжатия. В это время приводы Af, Ar вырабатывают усилие в направлении сжатия, величина которого получена посредством умножения давления в камере 5 со стороны стержня на площадь поверхности, испытывающей воздействие давления, на стороне поршня 3 с камерой 5 со стороны стержня.
[0057] В это время, аналогично операции по выработке усилия в направлении расширения, давление в камере 5 со стороны стержня управляется посредством давления открытия клапана для регулируемого предохранительного клапана 22, которое определено в соответствии с величиной тока, пропускаемого через регулируемый предохранительный клапан 22.
[0058] Кроме того, посредством переключения между открытым и закрытым состояниями первого клапана 9 открытия/закрытия и второго клапана 11 открытия/закрытия независимо от состояния управления двигателем 15, приводы Af, Ar могут быть принуждены действовать как амортизаторы, наряду с функцией привода. Таким образом, не нужны неприятные и быстрые операции по переключению клапанов и поэтому может быть выполнена очень чувствительная и надежная система.
[0059] Поскольку одиночные приводы стержневого типа использованы в качестве приводов Af, Ar, длину хода легче гарантировать, чем при использовании двойных приводов стержневого типа. Поэтому, полная длина приводов Af, Ar уменьшена и в результате приводы Af, Ar могут быть легче установлены в железнодорожном вагоне.
[0060] Что касается подачи рабочей жидкости на масляной основе от насоса 12 и потока рабочей жидкости на масляной основе во время операций расширения и сжатия, то рабочая жидкость на масляной основе проходит через камеру 5 со стороны стержня и камеру 6 со стороны поршня приводов Af, Ar в таком порядке и в конечном счете рециркулирует в резервуар 7. Таким образом, даже при примешивании газа в камеру 5 со стороны стержня или в камеру 6 со стороны поршня происходит автоматический выпуск газа в резервуар 7 в ходе операций расширения и сжатия приводов Af, Ar. В результате может быть предотвращено уменьшение чувствительности во время выработки усилия вследствие примешивания газа в рабочую жидкость на масляной основе.
[0061] Таким образом, при производстве амортизирующего устройства 1 железнодорожного вагона отсутствует необходимость выполнения затруднительных операций, таких как сборка амортизирующего устройства 1 железнодорожного вагона в среде масла или в вакуумной окружающей среде. Кроме того, нет необходимости проведения усовершенствованных операций по дегазации рабочей жидкости на масляной основе. В результате улучшена производительность амортизирующего устройства 1 железнодорожного вагона и уменьшены производственные затраты.
[0062] Кроме того, даже при примешивании газа в камеру 5 со стороны стержня и в камеру 6 со стороны поршня, происходит автоматический выпуск газа в резервуар 7 посредством операций расширения и сжатия приводов Af, Ar. Таким образом, не нужны частые операции по обслуживанию с целью восстановления рабочих характеристик. В результате можно уменьшить затраты на рабочую силу и расходы на техобслуживание.
[0063] Кроме того, со ссылками, главным образом, на фиг.3 и 4, будет описана конфигурация управляющего устройства С.
[0064] Как показано на фиг.1, управляющее устройство С содержит датчик 40 ускорения передней стороны, обнаруживающий ускорение of в боковом направлении передней части Bf кузова, служащей в качестве передней стороны кузова в горизонтальном боковом направлении относительно направления перемещения транспортного средства, и датчик 41 ускорения задней стороны 41, обнаруживающий ускорение af в боковом направлении задней части Bf кузова, служащей в качестве задней стороны кузова в горизонтальном боковом направлении относительно направления перемещения транспортного средства. Кроме того, как показано на фиг.2 и 3, управляющее устройство С содержит полосовые фильтры 42, 43, удаляющие постоянное ускорение во время перемещения по кривой, компоненту сноса и шум от ускорений af, ar в боковом направлении, и блок 44 контроля, вычисляющий задаваемые посредством команд значения на основе ускорений af, ar в боковом направлении, отфильтрованных полосовыми фильтрами 42, 43 и выводящий рассчитанные и задаваемые посредством команд значения на двигатель 15, соленоид 9е первого клапана 9 открытия/закрытия, соленоид Не второго клапана 11 открытия/закрытия и на пропорциональный соленоид 22 с регулируемого предохранительного клапана 22. Таким образом, управляющее устройство С управляет усилием, вырабатываемым соответствующими приводами Af, Ar.
[0065] Следует отметить, что поскольку полосовые фильтры 42, 43 удаляют установившееся ускорение во время перемещения по кривой, содержащееся в ускорении af в боковом направлении и ускорении ar в боковом направлении, управляющее устройство С может подавить только вибрацию, приводящую к ухудшению комфорта для пассажиров.
[0066] Как показано на фиг.3, блок 44 контроля содержит блок 44а вычисления ускорения рыскания 44а, вычисляющий ускорение рыскания ω центра G кузова непосредственно над передней и задней тележками Tf, Tr на основе ускорения af в боковом направлении и ускорения ar в боковом направлении, блок вычисления ускорения 44b бокового сноса, вычисляющий ускорение бокового сноса β центра G кузова для кузова В на основе ускорения af в боковом направлении и ускорения ar в боковом направлении, блок 44с определения типа участка, определяющий тип участка для текущего участка маршрута железнодорожного вагона, блок 44а вычисления команды, вычисляющий задаваемые посредством команд значения усилий Ff, Fr, указывающий усилия, подлежащие выработке индивидуально передним и задним приводами Af, Ar на основе ускорения рыскания ω и ускорения бокового сноса β, и блок 44е управления, управляющий двигателем 15, соленоидом 9е первого клапана 9 открытия/закрытия, соленоидом 11е второго клапана 11 открытия/закрытия и пропорциональным соленоидом 22 с регулируемого предохранительного клапана 22 на основе значений усилий Ff, Fr, задаваемых посредством команд.
[0067] В качестве технического средства управляющее устройство С содержит, например, аналого-цифровой преобразователь, предназначенный для преобразования сигналов, вырабатываемых датчиком 40 ускорения передней стороны и датчиком 41 ускорения задней стороны, в цифровые сигналы и импортирования цифровых сигналов, вышеупомянутые полосовые фильтры 42, 43, запоминающее устройство, например, типа ROM (постоянное запоминающее устройство), предназначенное для хранения программы, используемой для обработки, необходимой для управления амортизирующим устройством 1 железнодорожного вагона, устройство вычисления, например, центральный процессор, выполняющий обработку на основе программы, и запоминающее устройство, например, типа RAM (память с произвольным доступом), предоставляющее центральному процессору участок в памяти. Соответствующие блоки в блоке 44 контроля из управляющего устройства С могут быть выполнены при принуждении центрального процессора выполнять программу для описанной выше обработки. В качестве альтернативы вместо использования полосовых фильтров 42, 43 в качестве технических средств, полосовые фильтры 42, 43 могут быть выполнены посредством программного обеспечения при наличии центрального процессора, выполняющего программу.
[0068] Ускорения af, ar в боковом направлении установлены с использованием оси, проходящей через центр кузова В в направлении перемещения (в направлении слева-направо на фиг.1) в качестве эталона, то есть ускорение положительно при ориентации его в направлении, проходящем к правой стороне (вверх на фиг.1) и отрицательно при ориентации его в направлении, проходящем к левой стороне (вниз на фиг.1), Блок вычисления ускорения 44а рыскания вычисляет ускорение рыскания ω для центра G кузова непосредственно над тележкой Tf передней стороны и тележкой Tr задней стороны, соответственно, деля пополам разность между ускорением af передней стороны в боковом направлении и ускорением ar задней стороны в боковом направлении. Блок 44b вычисления ускорения бокового сноса вычисляет ускорение β бокового сноса центра G кузова, деля пополам сумму ускорения af в боковом направлении и ускорения ar в боковом направлении.
[0069] Для вычисления ускорения ω рыскания датчик 40 ускорения передней стороны предпочтительно размещен около привода Af передней стороны на линии, простирающейся в направлении вперед-назад или в диагональном направлении, содержащем центр G кузова В. Точно так же датчик 41 ускорения задней стороны предпочтительно размещен около привода Ar задней стороны на линии, простирающейся в направлении вперед-назад, или в диагональном направлении, содержащем центр G кузова В.
[0070] Ускорение рыскания ω может также быть вычислено на основе соответствующих расстояний между центром G кузова и датчиками 40, 41 ускорения, взаимного их размещения и ускорениями af, ar в боковом направлении. Таким образом, инсталляционные положения датчиков 40, 41 ускорения могут быть выбраны по желанию, В этом случае, вместо определения ускорения ω посредством деления на два разности между ускорением af в боковом направлении и ускорением ar в боковом направлении, ускорение ω рыскания вычислено на основании разности между ускорением af в боковом направлении и ускорением ar в боковом направлении, соответствующих расстояний между центром G кузова и датчиками 40, 41 ускорения, и из взаимных их размещений.
[0071] Конкретнее, при расстоянии в направлении вперед-назад между датчиком 40 ускорения передней стороны и центром G кузова, установленным равным Lf, и при расстоянии в направлении вперед-назад между датчиком 41 ускорения задней и центром G кузова, установленным равным Lr, ускорение ω рыскания вычислено по формуле ω=(af-or)/(Lf+Lr). Следует отметить, что ускорение ω рыскания может быть измерено при использовании датчика ускорения рыскания вместо его вычисления из ускорения, измеренного датчиком 40 ускорения передней стороны и датчиком 41 ускорения задней стороны.
[0072] Блок 44 с определения типа участка определяет, представляет ли собой текущий участок маршрута железнодорожного вагона открытый участок или туннельный участок, на основе значения отклонения е скорости, представляющего собой разность скоростей между заданной скоростью Vref поворота и фактической скоростью V поворота двигателя 15. Здесь «открытый участок» представляет собой общий термин, охватывающий все участки, кроме туннелей, то есть, все нетуннельные участки.
[0073] Операция определения, выполняемая блоком 44 с определения типа участка, будет теперь описана подробно.
[0074] Во-первых, будет описана операция управления, выполняемая блоком 44 контроля с целью принуждения двигателя 15 выполнять поворот с фиксированной скоростью поворота. Двигатель 15 управляется блоком 44е управления блока 44 контроля. Двигатель 15 управляется блоком 44е управления для поворота с фиксированной скоростью поворота.
[0075] Конкретнее, блок 44 контроля измеряет скорость поворота двигателя 15, используя датчик 45 поворотного положения, представляющий собой датчик положения, элемент Холла и т.п. и измеряющий поворотное положение не показанного на фигурах ротора двигателя 15. Блок 44е управления затем вычисляет скорость V поворота на основании поворотного положения, измеренного датчиком 45 поворотного положения, и управляет двигателем 15, возвращая скорость V поворота в качестве обратной связи.
[0076] В более подробном описании, для приведения в движение двигателя 15 с фиксированной скоростью поворота блок 44е управления содержит контур регулирования скорости, возвращающий измеренное значение скорости V поворота двигателя 15 посредством отрицательной обратной связи для скорости поворота V, контур тока, выполненный в виде контура регулирования скорости, и задающее устройство, предназначенное для подачи напряжения к не показанной на фигурах обмотке двигателя 15. В контуре регулирования скорости фиксированная скорость поворота двигателя 15 установлена равной заданной скорости Vref поворота, заданное значение тока определено посредством выполнения пропорционально-интегральной компенсации, пропорционально-интегрально-дифференциальной компенсации и т.п.относительно отклонения ε скорости между заданной скоростью Vref поворота и скоростью V поворота, а определенное заданное значение тока введено в контур регулирования тока. В контуре регулирования тока задаваемое посредством команды значение напряжения, в конечном счете предназначенное для приложения к задающему устройству, выработано посредством возвращения значения фактического тока, протекающего через двигатель 15. Блок 44е управления управляет двигателем 15, подавая ток в обмотку двигателя 15 через задающее устройство.
[0077] Таким образом, двигатель 15 управляется блоком 44е управления при фиксированной скорости поворота. Однако, при перемещении железнодорожного вагона через туннельный участок большая внешняя сила воздействует на кузов В вследствие возмущения воздушного потока вокруг кузова В. Поэтому, во время перемещения по туннельному участку кузов В вибрирует с большей амплитудой, чем во время перемещения по открытому участку.
[0078] Внешняя сила, воздействующая на кузов В, также действует на приводы Af, Ar, приводя к изменению давлении в камере 5 со стороны стержня и к большому изменению величины усилия, вырабатываемому приводами Af, Ar для подавления вибрации кузова В. Это изменение воздействует на разгрузочное давление насоса 12, приводя к осцилляциям скорости поворота насоса 12. При наличии осцилляции скорости поворота насоса 12 скорость поворота соединенного с ним двигателя 15 также, естественно, осциллирует больше на туннельном участке, чем на открытом участке. Таким образом при перемещении по туннельному участку отклонение скорости ε между фактической скоростью V поворота и заданной скоростью Vref поворота имеет тенденцию быть более значительным, чем при перемещении по открытому участку.
[0079] Следовательно, при большой абсолютной величине отклонения ε скорости, представляющего собой разность между заданной скоростью Vref поворота и фактической скоростью V поворота двигателя 15, может быть определено, что железнодорожный вагон едет по туннельному участку.
[0080] В соответствии с этим блок 44 с определения типа участка определяет, что железнодорожный вагон едет через туннельный участок, при превышении пороговой скорости Vb абсолютной величиной отклонения ε скорости, представляющей собой разность между заданной скоростью Vref поворота и фактической скоростью V поворота двигателя 15. Кроме того, при абсолютной величине отклонения ε скорости, равной пороговой скорости Vb или меньшей ее, блок 44с определения типа участка определяет, что железнодорожный вагон едет по открытому участку. Пороговая скорость Vb в это время установлена равной оптимальному значению для определения, фактически проводимому посредством сбора опытным путем во время перемещения железнодорожного вагона данных об отклонении ε скорости во время перемещения по открытому участку и данных об отклонении ε скорости во время перемещения по туннельному участку. Например, пороговая скорость Vb может быть установлена равной среднему значению отклонения ε скорости во время перемещения по туннельному участку, значению, вычисленному из среднего значения, например, среднему квадратическому отклонению ×а{а=1, 2) или его математическому ожиданию, или установлена равной величине, вычисленной на основании верхнего предельного значения или среднего значения отклонения ε скорости во время перемещения по открытому участку + среднее квадратическое отклонение ×а{а=1, 2).
[0081] Как показано на фиг.3, заданная скорость Vref поворота может быть получена в каждом случае из блока 44е управления, получена из другого устройства или может быть сохранена заранее в блоке 44с определения типа участка.
[0082] Следовательно, в амортизирующем устройстве железнодорожного вагона 1 тип участка может быть определен без контроля положения железнодорожного вагона на маршруте, что, таким образом, избавляет от необходимости получения информации о положении на маршруте из другого устройства.
[0083] Как описано выше, блок44 с определения типа участка способен определять тип участка для текущего участка перемещения железнодорожного вагона. Однако, в том случае, когда абсолютная величина отклонения е скорости между заданной скоростью Vref поворота и скорость V поворота, полученная в единственной операции выборки, превышает пороговую скорость Vb и, таким образом, определено наличие туннельного участка, кузов В подвержен сильной вибрации со стороны внешней силы и участок может быть ошибочно определен как туннельный участок, даже при фактическом перемещении железнодорожного вагона по открытому участку. Аналогичным образом, при падении значения отклонении ε скорости до уровня пороговой скорости Vb или ниже участок может быть ошибочно определен как открытый участок, даже при фактическом перемещении железнодорожного вагона по туннельному участку.
[0084] Следовательно, для улучшения точности определения типа участка блок 44с определения типа участка вычисляет среднеквадратичное значение отклонения ε скорости, определяет, что положение железнодорожного вагона на маршруте соответствует туннельному участку при среднеквадратичном значении выше заранее определенной пороговой скорости Vb, и определяет, что положение железнодорожного вагона на маршруте соответствует открытому участку при среднеквадратичном значении, равном пороговой скорости Vb или ниже ее.
[0085] В этом случае пороговая скорость Vb установлена так, чтобы определить тип участка из среднеквадратичной величины отклонения ε скорости, и поэтому не всегда установлена равной величине описанной выше пороговой скорости Vb, установленной относительно абсолютной величины отклонения ε скорости. Среднеквадратичная величина отклонения ε скорости получена посредством вычисления квадратного корня из величины, полученной посредством деления суммы квадратов заранее определенного количества значений отклонения ε скорости на заранее определенное их количество. Количество значений отклонения ε скорости, использованное для получения среднеквадратичного значения отклонения ε скорости, установлено по желанию в соответствии со временем выборки, частотой проведения операций управления и временем, необходимым для проведения определения блоком 44с определения типа участка. Например, количество значений отклонения ε скорости установлено равным количеству выборок, взятых в течение времени от 0,5 до 2 секунд.
[0086] При использовании, таким образом, среднеквадратичного значения отклонения ε скорости при определении типа участка, даже быстрое увеличение или уменьшение абсолютной величины отклонения ε скорости незначительно влияет на среднеквадратичное значение отклонения ε скорости. Следовательно, при сравнении среднеквадратичного значения отклонения ε скорости с пороговой скоростью Vb ошибочное определение участка как туннельного участка маловероятно даже при сильной вибрации кузова В под воздействием внешней силы, имеющей место во время перемещения по открытому участку. Кроме того, маловероятно ошибочное определение участка как открытого участка даже при быстром падении отклонения ε скорости до уровня пороговой скорости Vb или ниже ее во время перемещения по туннельному участку. В результате тип участка для текущего участка перемещения железнодорожного вагона может быть определен более точно.
[0087] После выполнения определения с использованием среднеквадратичного значения отклонения е скорости пороговая скорость Vb установлена равной оптимальному значению для определения, фактически проводимому посредством сбора опытным путем во время перемещения железнодорожного вагона данных об отклонении ε скорости во время перемещения по открытому участку и данных об отклонении ε скорости во время перемещения по туннельному участку. Например, пороговая скорость Vb может быть установлена равной среднему значению отклонения ε скорости во время перемещения по туннельному участку, значению, вычисленному из среднего значения, например, среднему квадратическому отклонению ×а(а=1, 2) или его математическому ожиданию, или установлена равной величине, вычисленной на основании верхнего предельного значения или среднего значения отклонения ε скорости во время перемещения по открытому участку + среднее квадратическое отклонение ×а(а=1, 2).
[0088] При определении участка как открытого участка блоком 44с определения типа участка после определения участка как туннельного участка, блок 44с определения типа участка может определить множество последовательных открытых участков.
[0089] Как описано выше, блок 44с определения типа участка способен определять представляет ли собой тип участка для текущего участка перемещения железнодорожного вагона открытый участок или туннельный участок. Кроме того, блок 44 с определения типа участка определяет, превышает ли абсолютная величина усилия приводов Af, Ar пороговое значение усилия. Таким образом, блок 44 с определения типа участка способен определить, является ли открытый участок прямолинейным участком или криволинейным участком, и имела ли место неисправность амортизирующего устройства 1 железнодорожного вагона.
[0090] Конкретнее, в дополнение к описанному выше определению типа участка с использованием отклонения е скорости, блок 44 с определения типа участка определяет, превышает ли абсолютная величина усилия, выработанного приводами Af, Ar, пороговое значение Fc усилия. Усилие, реально вырабатываемое приводами Af, Ar, может быть получено посредством измерения вращающего момента не показанного на фигурах выходного вала двигателя 15. Выходной вал двигателя 15 связан с входным валом насоса 12. Кроме того, разгрузочное давление насоса 12 соответствует давлению камеры 5 со стороны стержня. Следовательно, зная заранее зависимость между приводами Af, Ar и вращающим моментом и измеряя вращающий момент выходного вала двигателя 15, можно получить усилие, вырабатываемое приводами Af, Ar.
[0091] Следует отметить, что измеренный вращающий момент содержит компонент, образованный силой кинетического трения в подвижной части насоса 12. Таким образом, при слишком большой, чтобы ее можно было игнорировать, величине компонента, обусловленного силой кинетического трения, этот компонент может быть удален посредством вычислений.
[0092] Кроме того, усилие, вырабатываемое приводами Af, Ar, отрегулировано в соответствии с давлением открытия клапана для регулируемого предохранительного клапана 22, и поэтому оценка усилия также может быть проведена согласно значению тока, подаваемого на пропорциональный соленоид 22 с регулируемого предохранительного клапана 22. Кроме того, вращающий момент двигателя 15 пропорционально зависит от величины тока, протекающего через двигатель 15, и поэтому усилие, вырабатываемое приводами Af, Ar может также быть получено посредством измерения тока, протекающего через двигатель 15.
[0093] Как показано на фиг.4, блок 44с определения типа участка определяет, что участок представляет собой криволинейный участок, когда тип участка для текущего участка перемещения железнодорожного вагона был определен как открытый участок и абсолютная величина усилия, выработанного приводами Af, Ar, превышает пороговое усилие Fc (область Y на фиг.4). С другой стороны, когда тип участка для текущего участка перемещения железнодорожного вагона был определен как открытый участок, но абсолютная величина усилия, выработанного приводами Af, Ar, равна пороговому усилию Fc или меньше его, блок 44 с определения типа участка определяет, что участок представляет собой прямолинейный участок (область W на фиг.4).
[0094] На криволинейном участке установившееся ускорение, известное как сверхцентробежное ускорение, которое зависит от угла наклона и не может быть ослаблено, обычно воздействует на кузов В. Диапазон длин волн вибрации, образованной в кузове В при воздействии этого установившегося ускорения, близок к диапазону длин волн вибрации кузова В, который должен быть подавлен для улучшения комфорта пассажиров. Поэтому затруднительно полностью устранить установившееся ускорение посредством использования полосовых фильтров 42, 43. В результате на криволинейном участке установившееся ускорение добавлено к вибрации кузова В, вызываемой внешней силой. Следовательно, абсолютная величина усилия, выработанного приводами Af, Ar на криволинейном участке, имеет тенденцию быть больше, чем абсолютная величина усилия, выработанного приводами Af, Ar на прямолинейном участке.
[0095] Пороговое усилие Fc установлено равным оптимальной величине для определения, например, посредством фактического принуждения железнодорожного вагона при перемещении собирать экспериментальные данные, указывающие на усилие, вырабатываемое приводами Af, Ar во время перемещения по прямолинейному участку открытого участка, и данные, указывающие на усилие, вырабатываемое приводами At, Ar во время перемещения по криволинейному участку открытого участка. Например, пороговое усилие Fc может быть установлено равным нижнему предельному значению абсолютной величины усилия, выработанного приводами Af, Ar во время перемещения по криволинейному участку, значению, вычисленному из среднего значения, например, среднему квадратическому отклонению ×а(а=1, 2) или его математическому ожиданию, или установлена равной верхнему предельному значению абсолютной величины усилия, выработанного приводами Af, Ar во время перемещения по прямолинейному участку или величине, вычисленной по формуле (среднее значение + среднее квадратическое отклонение ×а(а=1, 2)).
[0096] Следовательно, при перемещении железнодорожного вагона по открытому участку амортизирующее устройство 1 железнодорожного вагона может определить, представляет ли собой тип участка для текущего участка перемещения железнодорожного вагона криволинейный участок или прямолинейный участок открытого участка, посредством определения, превышает ли абсолютная величина усилия, выработанного приводами Af, Ar, пороговое усилие Fc.
[0097] Кроме того, при определении блоком 44 с определения типа участка, что тип участка для текущего участка перемещения железнодорожного вагона представляет собой туннельный участок и абсолютная величина усилия, выработанного приводами Af, Ar, равна пороговому усилию Fc или превышает его, определено, что амортизирующее устройство 1 железнодорожного вагона неисправно (область Z на фиг.4).
[0098] Конкретнее, на туннельном участке абсолютная величина усилия, выработанного приводами Af, Ar, больше, чем на открытом участке и, таким образом, при превышении абсолютной величиной усилия порогового усилия Fc можно определить, что амортизирующее устройство 1 железнодорожного вагона функционирует нормальным образом во время перемещения по туннельному участку (область Х на фиг.4). С другой стороны при абсолютной величине усилия, выработанного приводами Af, Ar, равной пороговому усилию Fc, или меньшей его, можно определить, что поскольку усилие приводов Af, Ar уменьшено даже при перемещении железнодорожного вагона по туннельному участку, амортизирующее устройство 1 железнодорожного вагона неисправно (область Z на фиг.4).
[0099] При продолжении управления подавлением вибрации кузова В после определения, что амортизирующее устройство 1 железнодорожного вагона неисправно, может возрасти вибрация кузова В, что приводит к уменьшению комфорта пассажиров транспортного средства. Поэтому амортизирующее устройство 1 железнодорожного вагона активизирует описанную выше цепь D амортизатора посредством прекращения подачи электропитания к двигателю 15, первому клапану 9 открытия/закрытия, второму клапану 11 открытия/закрытия и регулируемому предохранительному клапану 22. В результате приводы Af, Ar действуют в качестве пассивных демпферов. При принуждении приводов Af, Ar действовать таким образом в качестве пассивных демпферов во время неисправности, приводы Af, Ar могут быть вынуждены вырабатывать амортизирующую силу, посредством которой может быть подавлена вибрация кузова В.
[0100] Следует отметить, что определение того, представляет ли собой открытый участок прямолинейный участок или криволинейный участок, и обнаружение неисправности в амортизирующем устройстве 1 железнодорожного вагона могут быть выполнены аналогичным образом с использованием задаваемых посредством команд значений усилий Ff, Fr приводов Af, Ar, а не усилий приводов Af, Ar.
[0101] Как показано на фиг.5, блок 44d вычисления команды выполнен с возможностью наличия управляющих устройств Н∞ 44d1, 44d2. Блок 44d вычисления команды содержит управляющее устройство Н∞ 44d1, вычисляющее усилие Fω (задаваемое посредством команды значение ускорения рыскания), предназначенное для подавления вибрации рыскания кузова В, на основании значения ускорения ω, вычисленного блоком 44а вычисления ускорения рыскания, управляющее устройство Ноо 44d2, вычисляющее усилие Fβ (задаваемое посредством команды значение бокового сноса), предназначенное для подавления вибрации бокового сноса кузова В, на основании значения ускорения β, вычисленного блоком 44b вычисления ускорения бокового сноса, суммирующее устройство 44d3, вычисляющее задаваемое посредством команды значение усилия Ff, указывающее на усилие, вырабатываемое приводом Af передней стороны, посредством сложения усилия Fω и усилия Fβ, и вычитающее устройство 44d4, вычисляющее задаваемое посредством команды значение усилия Fr, указывающее на усилие, вырабатываемое приводом Ar задней стороны, посредством вычитания усилия Fω из усилия Fβ.
[0102] Управляющие устройства Н∞ 44d1, 44d2 хранят значение коэффициента усиления системы управления, предназначенное для использования во время перемещения по прямолинейному участку, значение коэффициента усиления системы управления, предназначенное для использования во время перемещения по криволинейному участку, и значение коэффициента усиления системы управления, предназначенное для использования во время перемещения по туннельному участку. Управляющие устройства Н∞ 44d1, 44d2 вычисляют усилие Fω и усилие Fβ, выбирая соответствующее значение коэффициента усиления системы управления в соответствии с результатом определения, полученным блоком 44с определения типа участка.
[0103] В отношении значений коэффициента усиления системы управления, используемых для расчета усилия Fω, следует отметить, что, например, значение коэффициента усиления системы управления, предназначенное для использования на криволинейном участке, установлено большим значения коэффициента усиления системы управления, предназначенного для использования на прямолинейном участке, а значение коэффициента усиления системы управления, предназначенное для использования на туннельном участке, установлено большим значения коэффициента усиления системы управления, предназначенного для использования на криволинейном участке. Таким образом, значения коэффициента усиления системы управления установлены равными оптимальным значениям для соответствующих участков. Значения коэффициента усиления системы управления, используемые для расчета усилия Fβ, аналогичным образом установлены равными оптимальным значениям для соответствующих участков. При этом ускорение β бокового сноса включает установившееся ускорение на криволинейном участке, и поэтому значение коэффициента усиления системы управления, предназначенное для использования на криволинейном участке, предпочтительно установлено меньшим значения коэффициента усиления системы управления, предназначенного для использования на прямолинейном участке, а значение коэффициента усиления системы управления, предназначенное для использования на туннельном участке, предпочтительно установлено большим значения коэффициента усиления системы управления, предназначенного для использования на прямолинейном участке.
[0104] Поскольку управление Н ∞ выполнено блоком 44d вычисления команды, хорошее амортизирующее действие может быть получено независимо от частоты вибрации на входе в кузов В, и в результате может быть получена высокая степень надежности. Однако, это не исключает использования средств управления, отличных от Н∞. Поэтому, например, передние и задние приводы Af, Ar могут также управляться посредством управляющего устройства типа Skyhook, в котором скорость в боковом направлении получена на основании ускорений af, ar в боковом направлении, а задаваемое посредством команды значение усилия определено посредством умножения скорости в боковом направлении на коэффициент амортизации Skyhook. Кроме того, вместо управления величинами усилия передних и задних приводов Af, Ar в сочетании с ускорением ω рыскания и ускорением β бокового сноса, привод Af передней стороны и привод Ar задней стороны могут управляться независимо друг от друга.
[0105] Как показано на фиг.3, блок 44е управления выводит команды управления, вынуждая приводы Af, Ar вырабатывать усилие, согласное с соответствующими задаваемыми посредством команд значениями усилий Ff, Fr. Конкретнее, блок 44е управления вычисляет управляющие команды, выводимые на двигатель 15, соленоид 9е первого клапана 9 открытия/закрытия, соленоид 11е второго клапана 11 открытия/закрытия и пропорциональный соленоид 22с регулируемого предохранительного клапана 22, и подает на выход рассчитанные управляющие команды. Кроме того, при вычислении управляющих команд на основании задаваемых посредством команд значений усилий Ff, Fr, управляющие команды могут быть вычислены с использованием управления с обратной связью посредством возвращения назад значения усилия, подаваемого на выход приводами Af, Ar в этот момент времени.
[0106] Конкретнее как описано выше, блок 44е управления вычисляет управляющие команды, подаваемые на соленоид 9е первого клапана 9 открытия/закрытия, соленоид 11е второго клапана 11 открытия/закрытия и пропорциональный соленоид 22 с регулируемого предохранительного клапана 22 на основании задаваемых посредством команд значений усилий Ff, Fr, и подает на выход рассчитанные управляющие команды.
[0107] Следовательно, амортизирующее устройство 1 железнодорожного вагона определяет, является ли тип участка для текущего участка перемещения железнодорожного вагона открытым участком или туннельным участком, используя блок 44с определения типа участка, и выбирает соответствующее значение коэффициента усиления системы управления для типа участка текущего участка перемещения железнодорожного вагона на основе результата такого определения. Амортизирующее устройство 1 железнодорожного вагона затем вычисляет значения задаваемых посредством команд Ff, Fr, для управления приводами Af, Ar. В результате может быть эффективно подавлена вибрация кузова В железнодорожного вагона, вибрирующего в различных режимах вибрации в зависимости от типа участка.
[0108] Поэтому, в соответствии с амортизирующим устройством 1 железнодорожного вагона, блок 44 с определения типа участка определяет, представляет ли собой тип участка для текущего участка перемещения железнодорожного вагона открытый участок или туннельный участок, на основании значения отклонения ε скорости, то есть разности скоростей между заданной скоростью Vref поворота и фактической скоростью V поворота двигателя 15, и в результате тип участка может быть определен без получения информации касательно железнодорожного вагона о положении вагона при перемещении и информации о типе участка от другого устройства, например, от контрольного устройства транспортного
средства.
[0109] Кроме того, в соответствии с амортизирующим устройством 1 железнодорожного вагона, поскольку нет никакой потребности получать касающуюся железнодорожного вагона информацию о положении при перемещении и информацию о типе участка, от другого устройства, например, от контрольного устройства транспортного средства, не нужен интерфейс для установки связи с контрольным устройством транспортного средства или с чем-нибудь подобным, и поэтому амортизирующее устройство 1 железнодорожного вагона может быть легко установлено даже в железнодорожном вагоне, не содержащем развитых средств передачи информации о транспортном средстве, например, в железнодорожном вагоне, используемом на узкоколейной железной дороге.
[0110] Кроме того, в этом варианте реализации настоящего изобретения блок 44с определения типа участка также способен различать прямолинейный участок и криволинейный участок открытого участка и поэтому может быть выбрано более подходящее для данного типа участка значение коэффициента усиления системы управления. В результате вибрация кузова В железнодорожного вагона может быть подавлена еще эффективнее.
[0111] Кроме того, при определении блоком 44 с определения типа участка, что текущий участок перемещения железнодорожного вагона принадлежит к туннельному типу, и при значениях усилий или задаваемых посредством команды значений усилий для приводов Af, Ar, равных пороговому усилию или меньше его, определено, что амортизирующее устройство 1 железнодорожного вагона неисправно. Следовательно, при нахождении амортизирующего устройства 1 железнодорожного вагона в неисправном состоянии, управление подавлением вибрации кузова В остановлено. Кроме того, при определении того, что амортизирующее устройство 1 железнодорожного вагона в неисправном состоянии, приводы Af, Ar принуждены действовать в качестве пассивных демпферов, так что вибрация кузова В может быть подавлена вырабатываемой ими амортизирующей силой.
[0112] Кроме того, вычислено среднеквадратичное значение отклонения ε скорости, причем при превышении этим среднеквадратичным значением заранее определенной пороговой скорости Vb определено, что положение железнодорожного вагона на маршруте соответствует туннельному участку, тогда как при значении этого среднеквадратичного значения, равном пороговой скорости Vb или меньшем ее, определено, что положение железнодорожного вагона на маршруте соответствует открытому участку. В этом случае амортизирующее устройство 1 железнодорожного вагона может точнее определить тип участка для текущего участка перемещения железнодорожного вагона. Следовательно, предотвращены претерпевающие частые изменения определения типа участка, и в результате может быть выбрано более подходящее значение коэффициента усиления системы управления для данного режима вибрации кузова В, посредством чего вибрация кузова В может быть стабильно подавлена.
[0113] Кроме того, при использовании амортизирующего устройства 1 железнодорожного вагона согласно этому варианту реализации настоящего изобретения и при определении, что положение железнодорожного вагона на маршруте соответствует криволинейному участку, значение коэффициента усиления системы управления, использованного для расчета усилия Fω, падает ниже значения коэффициента усиления системы управления, используемого на участке открытого участка, отличном от криволинейного участка. Поэтому может быть уменьшено влияние установившегося ускорения, которое трудно удалить посредством использования полосовых фильтров 42, 43, что приводит к резкому улучшению комфорта пассажиров железнодорожного вагона во время перемещения по криволинейному участку.
[0114] Следует отметить, что в вышеупомянутом варианте реализации настоящего изобретения несколько приводов Af, Ar управляются одним управляющим устройством С. Однако, настоящее изобретение не ограничено этим и, конечно, по одному управляющему устройству С может быть выполнено для каждого привода Af, Ar таким образом, что соответствующие приводы Af, Ar управляются ими.
[0115] Хотя настоящее изобретение было описано выше со ссылками на некоторые варианты реализации, изобретение не ограничено описанными выше вариантами реализации. Специалисты в данной области техники могут внести изменения и модификации в описанные выше варианты реализации, не выходя за пределы объема формулы изобретения.
[0116] Содержание заявки Tokugan 2011-136163 с датой регистрации от 20 июня 2011 г. в Японии включено в настоящую заявку посредством ссылки.
[0117] Пункты формулы настоящего изобретения, в которых заявлены права на исключительную собственность или привилегия, определены ниже.
| название | год | авторы | номер документа |
|---|---|---|---|
| АМОРТИЗИРУЮЩЕЕ УСТРОЙСТВО ЖЕЛЕЗНОДОРОЖНОГО ВАГОНА | 2012 |
|
RU2557641C1 |
| АМОРТИЗИРУЮЩЕЕ УСТРОЙСТВО ЖЕЛЕЗНОДОРОЖНОГО ВАГОНА | 2012 |
|
RU2573532C9 |
| АМОРТИЗИРУЮЩЕЕ УСТРОЙСТВО ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2568533C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ВИБРАЦИЕЙ ЖЕЛЕЗНОДОРОЖНОГО ВАГОНА | 2016 |
|
RU2669909C1 |
| ЛИНЕЙНАЯ ПНЕВМАТИЧЕСКАЯ СИСТЕМА ДЛЯ ПРИВЕДЕНИЯ В ДВИЖЕНИЕ ТРАНСПОРТНЫХ СРЕДСТВ | 2002 |
|
RU2296683C2 |
| АМОРТИЗАТОР ВАГОННОГО ЗАМЕДЛИТЕЛЯ | 2017 |
|
RU2737178C2 |
| СИСТЕМА НАКЛОНА И СПОСОБ УПРАВЛЕНИЯ НАКЛОНОМ ДЛЯ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА И ЖЕЛЕЗНОДОРОЖНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2021 |
|
RU2800617C1 |
| Гидрогазовый поглощающий аппарат | 1977 |
|
SU734044A1 |
| СОЕДИНИТЕЛЬНОЕ И РАЗЪЕДИНИТЕЛЬНОЕ УСТРОЙСТВО МУФТЫ СЦЕПЛЕНИЯ | 2019 |
|
RU2711521C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПНЕВМОЦИЛИНДРАМИ РАЗГРУЗКИ ДУМПКАРА (ВОЗДУХОЗАМЕДЛИТЕЛЬ) | 2009 |
|
RU2416539C1 |
Изобретение относится к области машиностроения. Амортизирующее устройство железнодорожного вагона содержит цилиндр и стержень, один из которых соединен с тележкой железнодорожного вагона, а другой соединен c кузовом железнодорожного вагона. Стержень вставлен в цилиндр и соединен с поршнем. Поршень вставлен в цилиндр с возможностью свободного скольжения. Камера со стороны стержня и камера со стороны поршня образованы внутри цилиндра поршнем. Резервуар выполнен с возможностью хранения жидкости. Первый клапан открытия/закрытия размещен на первом канале, соединяющем камеру со стороны стержня с камерой со стороны поршня. Второй клапан открытия/закрытия размещен на втором канале, соединяющем камеру со стороны поршня с резервуаром. Насос выполнен с возможностью подачи жидкости из резервуара в камеру со стороны стержня. Двигатель выполнен с возможностью поворота с установленной скоростью поворота для приведения насоса в поворотное движение. Блок определения типа участка определяет, представляет ли собой тип участка для текущего участка перемещения железнодорожного вагона открытый участок или туннельный участок, на основании отклонения скорости между заданной скоростью поворота и фактической скоростью поворота двигателя. Достигается возможность определения типа участка без получения информации от контрольного устройства транспортного средства. 9 з.п. ф-лы, 5 ил.
1. Амортизирующее устройство железнодорожного вагона, которое
определяет усилие, которое должно быть выработано приводом в качестве задаваемого посредством команды значения усилия, и подавляет вибрацию кузова посредством управления приводом, причем привод содержит
цилиндр, соединенный с одним элементом, выбранным из тележки и кузова железнодорожного вагона,
поршень, вставленный в цилиндр с возможностью свободного скольжения;
стержень, вставленный в цилиндр и соединенный с поршнем и другим элементом, выбранным из тележки и кузова, и
камеру со стороны стержня и камеру со стороны поршня, определенные внутри цилиндра поршнем,
причем амортизирующее устройство железнодорожного вагона содержит
резервуар, выполненный с возможностью хранения жидкости, подаваемой в цилиндр и выпускаемой из цилиндра,
первый клапан открытия/закрытия, размещенный на первом канале, соединяющем камеру со стороны стержня с камерой со стороны поршня, выполненный с возможностью открытия и закрытия первого канала,
второй клапан открытия/закрытия, размещенный на втором канале, соединяющем камеру со стороны поршня с резервуаром, выполненный с возможностью открытия и закрытия второго канала,
насос, выполненный с возможностью подачи жидкости из резервуара в камеру со стороны стержня;
двигатель, выполненный с возможностью поворота с установленной скоростью поворота для приведения насоса в поворотное движение; и
блок определения типа участка, выполненный с возможностью определения, представляет ли собой тип участка для текущего участка перемещения железнодорожного вагона открытый участок или туннельный участок, на основании отклонения скорости между заданной скоростью поворота и фактической скоростью поворота двигателя.
2. Амортизирующее устройство по п. 1, в котором
при определении, что тип участка для текущего участка перемещения железнодорожного вагона представляет собой открытый участок, а усилие или задаваемое посредством команды значение усилия привода превышает пороговое усилие, блок определения участка определяет, что тип участка представляет собой криволинейный участок.
3. Амортизирующее устройство по п. 1, в котором
при определении, что тип участка для текущего участка перемещения железнодорожного вагона представляет собой туннельный участок, а усилие или задаваемое посредством команды значение усилия привода равно пороговому усилию или меньше него, блок определения типа участка определяет, что привод неисправен.
4. Амортизирующее устройство по п. 3, в котором
при определении блоком определения типа участка, что привод неисправен, привод вынуждают работать в качестве пассивного амортизатора путем переключения первого клапана открытия/закрытия и второго клапана открытия/закрытия в закрытое положение и остановки двигателя.
5. Амортизирующее устройство по п. 1, в котором
блок определения типа участка вычисляет среднеквадратичное значение отклонения скорости, и при среднеквадратичном значении выше пороговой скорости блок определения типа участка определяет, что положение железнодорожного вагона на маршруте соответствует туннельному участку, а при среднеквадратичном значении, равном пороговой скорости или ниже, блок определения типа участка определяет, что положение железнодорожного вагона на маршруте соответствует открытому участку.
6. Амортизирующее устройство по п. 1, дополнительно содержащее
блок расчета команд, вычисляющий задаваемое посредством команды значение рыскания для подавления вибрации рыскания кузова, обусловленного ускорением рыскания относительно центра кузова, вычисляющий задаваемое посредством команды значение бокового сноса для подавления вибрации бокового сноса кузова, обусловленного ускорением бокового сноса в горизонтальном боковом направлении кузова, и вычисляющий задаваемое посредством команды значение усилия на основании задаваемого посредством команды значения рыскания и задаваемого посредством команды значения бокового сноса.
7. Амортизирующее устройство по п. 6, в котором
при определении блоком определения типа участка, что участок представляет собой туннельный участок, блок вычисления команды устанавливает значение коэффициента усиления системы управления, используемое для вычисления задаваемого посредством команды значения рыскания и задаваемого посредством команды значения бокового сноса, большее значения коэффициента усиления системы управления, используемого при определении открытого участка.
8. Амортизирующее устройство по п. 6, в котором
при определении блоком определения типа участка, что участок представляет собой криволинейный участок, блок вычисления команды устанавливает значение коэффициента усиления системы управления, используемое для вычисления задаваемого посредством команды значения бокового сноса, меньшее, чем значение коэффициента усиления системы управления, используемое при определении открытого участка, но не криволинейного участка.
9. Амортизирующее устройство по п. 1, дополнительно содержащее
выпускной канал, соединяющий камеру со стороны стержня с резервуаром; и
регулируемый предохранительный клапан, размещенный на полпути на выпускном канале и имеющий изменяемое давление открытия клапана, причем
усилие привода управляется посредством регулировки давление открытия клапана для регулируемого предохранительного клапана.
10. Амортизирующее устройство по п. 1, дополнительно содержащее
всасывающий канал, выполненный для обеспечения протекания жидкости только из резервуара в камеру со стороны поршня; и
канал выпрямления, выполненный для обеспечения протекания жидкости только из камеры со стороны поршня в камеру со стороны стержня.
| JP 2010065797 A, 25.03.2010 | |||
| JP 2003320931 A, 11.11.2003 | |||
| JP 2008247204 A, 16.10.2008 | |||
| Передвижная загрузочная машина | 1947 |
|
SU83029A1 |

