ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННУЮ ЗАЯВКУ
[001] Настоящая заявка испрашивает приоритет китайской заявки № 202010990343.2, поданной 18 сентября 2020 года, озаглавленной «Tilting System and Tilting Control Method for Railway Vehicle and Railway Vehicle», которая полностью включена в настоящее описание посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ
[002] Настоящее изобретение относится к области техники железнодорожного транспорта и, в частности, к системе наклона и способу управления наклоном для железнодорожного транспортного средства и железнодорожному транспортному средству.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
[003] Центробежная сила, возникающая при движении железнодорожного транспортного средства по изогнутой дороге, вызывает у пассажиров дискомфорт и в тяжелых случаях даже приводит к аварии в виде переворота.
[004] Следовательно, в предшествующем уровне техники наружный рельс обычно приподнимают до определенной степени, чтобы сбалансировать центробежную силу центростремительной составляющей силой (которая также называется центростремительной силой), создаваемой весом кузова транспортного средства. Эта практика также известна как возвышение наружного рельса.
[005] Однако возвышения наружного рельса на некоторых сложных участках дороги обычно недостаточно из-за ограничений, связанных с природными условиями, во время прокладки железной дороги, что ограничивает скорость преодоления изгибов железнодорожным транспортным средством и уменьшает эффективность транспортировки. Кроме того, экстренная работа традиционных линий также сталкивается с проблемой недостаточного возвышения. В этом случае центробежная сила, создаваемая при выполнении преодоления изгибов, часто не может быть полностью сбалансирована, и центробежное ускорение, создаваемое несбалансированной центробежной силой, отрицательно влияет на комфорт пассажиров при езде.
[006] Кузов поезда с наклоняемым кузовом может поворачиваться под определенным углом относительно плоскости рельса, что в определенной степени уменьшает несбалансированное центробежное ускорение и улучшает комфорт во время движения. Традиционные поезда с наклоняемым кузовом обычно требуют сложной системы наклона на конструкции вторичной подвески, что приводит к низкой надежности и высоким затратам.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[007] В виду проблем в предшествующем уровне техники варианты осуществления настоящего изобретения обеспечивают систему наклона и способ управления наклоном для железнодорожного транспортного средства и железнодорожное транспортное средство.
[008] Согласно варианту осуществления первого аспекта настоящего изобретения предусмотрена система наклона для железнодорожного транспортного средства, содержащая контроллер, воздушный цилиндр высокого давления, левую пневмопружину, правую пневмопружину, левую вспомогательную воздушную камеру, правую вспомогательную воздушную камеру, первый трехпозиционный электромагнитный пропорциональный клапан подачи, второй трехпозиционный электромагнитный пропорциональный клапан подачи, датчики, клапан разности давлений и двухпозиционный переключающий клапан, при этом
[009] левая пневмопружина сообщается с левой вспомогательной воздушной камерой, а правая пневмопружина сообщается с правой вспомогательной воздушной камерой;
[0010] датчики выполнены с возможностью сбора данных железнодорожного транспортного средства во время движения и передачи собранных данных на контроллер; контроллер выполнен с возможностью управления первым трехпозиционным электромагнитным пропорциональным клапаном подачи и вторым трехпозиционным электромагнитным пропорциональным клапаном подачи на основе данных, собранных датчиками, вследствие чего воздух высокого давления в воздушном цилиндре высокого давления подается в левую пневмопружину через первый трехпозиционный электромагнитный пропорциональный клапан подачи, а воздух высокого давления в воздушном цилиндре высокого давления подается в правую пневмопружину через второй трехпозиционный электромагнитный пропорциональный клапан подачи, или воздух внутри левой пневмопружины выпускается в атмосферу через первый трехпозиционный электромагнитный пропорциональный клапан подачи, а воздух внутри правой пневмопружины выпускается в атмосферу через второй трехпозиционный электромагнитный пропорциональный клапан подачи; и
[0011] клапан разности давлений выполнен с возможностью сообщения с левой вспомогательной воздушной камерой и правой вспомогательной воздушной камерой; и двухпозиционный переключающий клапан сообщается с левой вспомогательной воздушной камерой и правой вспомогательной воздушной камерой через трубопроводы соответственно.
[0012] Согласно варианту осуществления датчики предусматривают датчик ускорения и датчики определения высоты пневмопружины, при этом
[0013] датчик ускорения установлен на боковой балке рамы железнодорожного транспортного средства; и
[0014] датчики определения высоты пневмопружины установлены в смежных положениях левой пневмопружины и правой пневмопружины.
[0015] Согласно варианту осуществления система наклона дополнительно содержит третий трехпозиционный электромагнитный клапан и четвертый трехпозиционный электромагнитный клапан, при этом
[0016] третий трехпозиционный электромагнитный клапан сообщается с воздушным цилиндром высокого давления, левой пневмопружиной и атмосферой соответственно; четвертый трехпозиционный электромагнитный клапан сообщается с воздушным цилиндром высокого давления, правой пневмопружиной и атмосферой соответственно; и третий трехпозиционный электромагнитный клапан и четвертый трехпозиционный электромагнитный клапан управляются контроллером для открытия и закрытия.
[0017] Согласно варианту осуществления третий трехпозиционный электромагнитный клапан представляет собой трехпозиционный электромагнитный переключающий клапан или трехпозиционный электромагнитный пропорциональный клапан подачи; и/или
[0018] четвертый трехпозиционный электромагнитный клапан представляет собой трехпозиционный электромагнитный переключающий клапан или трехпозиционный электромагнитный пропорциональный клапан подачи.
[0019] Согласно варианту осуществления второго аспекта настоящего изобретения предусмотрен способ управления наклоном системы наклона железнодорожного транспортного средства в соответствии с вариантами осуществления первого аспекта настоящей заявки, включающий:
[0020] этап S11, предусматривающий получение контроллером несбалансированного центробежного ускорения рамы в реальном времени, полученного датчиком ускорения, и сравнение несбалансированного центробежного ускорения рамы в реальном времени с заданным порогом несбалансированного центробежного ускорения; и
[0021] этап S12, предусматривающий создание, когда несбалансированное центробежное ускорение рамы в реальном времени больше заданного порога несбалансированного центробежного ускорения, команд управления для первого трехпозиционного электромагнитного пропорционального клапана подачи и второго трехпозиционного электромагнитного пропорционального клапана подачи на основе несбалансированного центробежного ускорения рамы в реальном времени, значения высоты левой пневмопружины в реальном времени и значения высоты правой пневмопружины в реальном времени для выполнения операции впуска воздуха или выпуска воздуха в отношении левой пневмопружины и правой пневмопружины, вследствие чего операция наклона завершается.
[0022] Согласно варианту осуществления создание команд управления для первого трехпозиционного электромагнитного пропорционального клапана подачи и второго трехпозиционного электромагнитного пропорционального клапана подачи на основе несбалансированного центробежного ускорения рамы в реальном времени, значения высоты левой пневмопружины в реальном времени и значения высоты правой пневмопружины в реальном времени предусматривает:
[0023] вычисление угла наклона кузова железнодорожного транспортного средства на основе несбалансированного центробежного ускорения рамы в реальном времени;
[0024] вычисление целевого значения разницы высот между левой пневмопружиной и правой пневмопружиной на основе угла наклона кузова железнодорожного транспортного средства;
[0025] вычисление целевого значения изменения высоты левой пневмопружины, целевого значения изменения высоты правой пневмопружины и значения скорости изменения высоты левой пневмопружины, и значения скорости изменения высоты правой пневмопружины на основе целевого значения разницы высот между левой пневмопружиной и правой пневмопружиной; и
[0026] создание команд управления для первого трехпозиционного электромагнитного пропорционального клапана подачи и второго трехпозиционного электромагнитного пропорционального клапана подачи на основе полученного значения высоты левой пневмопружины в реальном времени и значения высоты правой пневмопружины в реальном времени в сочетании с целевым значением изменения высоты левой пневмопружины, целевым значением изменения высоты правой пневмопружины и значением скорости изменения высоты левой пневмопружины, и значением скорости изменения высоты правой пневмопружины.
[0027] Согласно варианту осуществления создание команд управления для первого трехпозиционного электромагнитного пропорционального клапана подачи и второго трехпозиционного электромагнитного пропорционального клапана подачи на основе несбалансированного центробежного ускорения рамы в реальном времени, значения высоты левой пневмопружины в реальном времени и значения высоты правой пневмопружины в реальном времени предусматривает:
[0028] вычисление скорости изменения несбалансированного центробежного ускорения рамы в реальном времени на основе несбалансированного центробежного ускорения рамы в реальном времени; и получение величины упреждающего управления левой пневмопружины и величины упреждающего управления правой пневмопружины на основе скорости изменения несбалансированного центробежного ускорения рамы в реальном времени;
[0029] вычисление целевого значения высоты левой пневмопружины и целевого значения высоты правой пневмопружины на основе несбалансированного центробежного ускорения рамы в реальном времени;
[0030] определение величины управления с обратной связью левой пневмопружины на основе значения высоты левой пневмопружины в реальном времени и целевого значения высоты левой пневмопружины; и определение величины управления с обратной связью правой пневмопружины на основе значения высоты правой пневмопружины в реальном времени и целевого значения высоты правой пневмопружины; и
[0031] создание команды управления для первого трехпозиционного электромагнитного пропорционального клапана подачи на основе величины управления с обратной связью левой пневмопружины и величины упреждающего управления левой пневмопружины; и создание команды управления для второго трехпозиционного электромагнитного пропорционального клапана подачи на основе величины управления с обратной связью правой пневмопружины и величины упреждающего управления правой пневмопружины.
[0032] Согласно варианту осуществления способ дополнительно включает:
[0033] когда железнодорожное транспортное средство покидает изогнутый участок дороги, балансировку левой пневмопружины и правой пневмопружины, при этом
[0034] когда железнодорожное транспортное средство покидает участок дороги с переходным изгибом, несбалансированное центробежное ускорение рамы в реальном времени постепенно уменьшается, и наружная пневмопружина начинает выпускать воздух, и высота наружной пневмопружины уменьшается; когда значение отклонения по высоте левой пневмопружины равно значению отклонения по высоте правой пневмопружины, двухпозиционный регулирующий переключающий клапан открывается для того, чтобы позволить воздуху внутри наружной пневмопружины поступать во внутреннюю пневмопружину, вследствие чего левая пневмопружина и правая пневмопружина возвращаются в сбалансированное состояние;
[0035] при этом наружная пневмопружина представляет собой пневмопружину с относительно большей высотой левой пневмопружины и правой пневмопружины, а внутренняя пневмопружина представляет собой пневмопружину с относительно меньшей высотой левой пневмопружины и правой пневмопружины, а значение отклонения по высоте пневмопружины представляет собой разницу между значением высоты пневмопружины в реальном времени и целевым значением высоты пневмопружины.
[0036] Согласно варианту осуществления способ дополнительно включает:
[0037] этап S21, предусматривающий, когда несбалансированное центробежное ускорение рамы в реальном времени меньше или равно заданному порогу несбалансированного центробежного ускорения, получение контроллером значения высоты левой пневмопружины в реальном времени и значения высоты правой пневмопружины в реальном времени и вычисление первого значения отклонения по высоте на основе значения высоты левой пневмопружины в реальном времени и второго значения отклонения по высоте на основе значения высоты правой пневмопружины в реальном времени; и
[0038] этап S22, предусматривающий сравнение первого значения отклонения по высоте с заданным первым интервалом и, когда первое значение отклонения по высоте превышает первый интервал, регулирование высоты левой пневмопружины путем управления первым трехпозиционным электромагнитным пропорциональным клапаном подачи, и сравнение второго значения отклонения по высоте с заданным вторым интервалом, и, когда второе значение отклонения по высоте превышает второй интервал, регулирование высоты правой пневмопружины путем управления вторым трехпозиционным электромагнитным пропорциональным клапаном подачи.
[0039] Согласно варианту осуществления третьего аспекта настоящего изобретения предусмотрено железнодорожное транспортное средство, содержащее:
[0040] систему наклона для железнодорожного транспортного средства, описанную в вариантах осуществления первого аспекта настоящего изобретения.
[0041] В системе наклона для железнодорожного транспортного средства, способе управления наклоном и железнодорожном транспортном средстве согласно вариантам осуществления настоящего изобретения разница высот левой и правой пневмопружин может регулироваться на основе состояния движения железнодорожного транспортного средства, таким образом, регулируется угол наклона, что предпочтительно для балансирования центробежной силы, создаваемой железнодорожным транспортным средством при движении по изогнутым участкам дороги.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
[0042] Чтобы более понятно проиллюстрировать технические решения, раскрытые в вариантах осуществления настоящего изобретения или в известном уровне техники, ниже кратко описаны графические материалы, используемые в описаниях вариантов осуществления или известного уровня техники. Графические материалы в нижеследующем описании представляют собой только определенные варианты осуществления настоящего изобретения, и специалист в данной области техники может без каких-либо творческих усилий в соответствии с графическими материалами получить другие графические материалы.
[0043] На фиг. 1 представлена структурная схема системы наклона для железнодорожного транспортного средства в соответствии с вариантом осуществления настоящего изобретения;
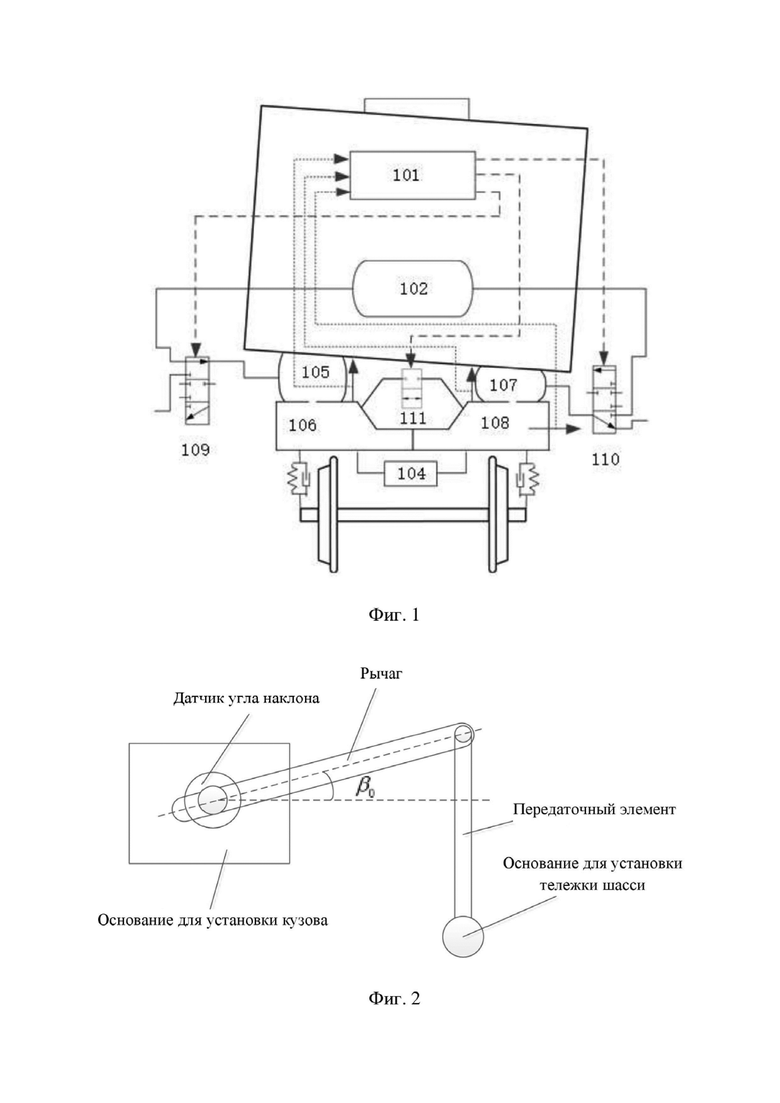
[0044] на фиг. 2 представлена схема, показывающая установку датчика ускорения;
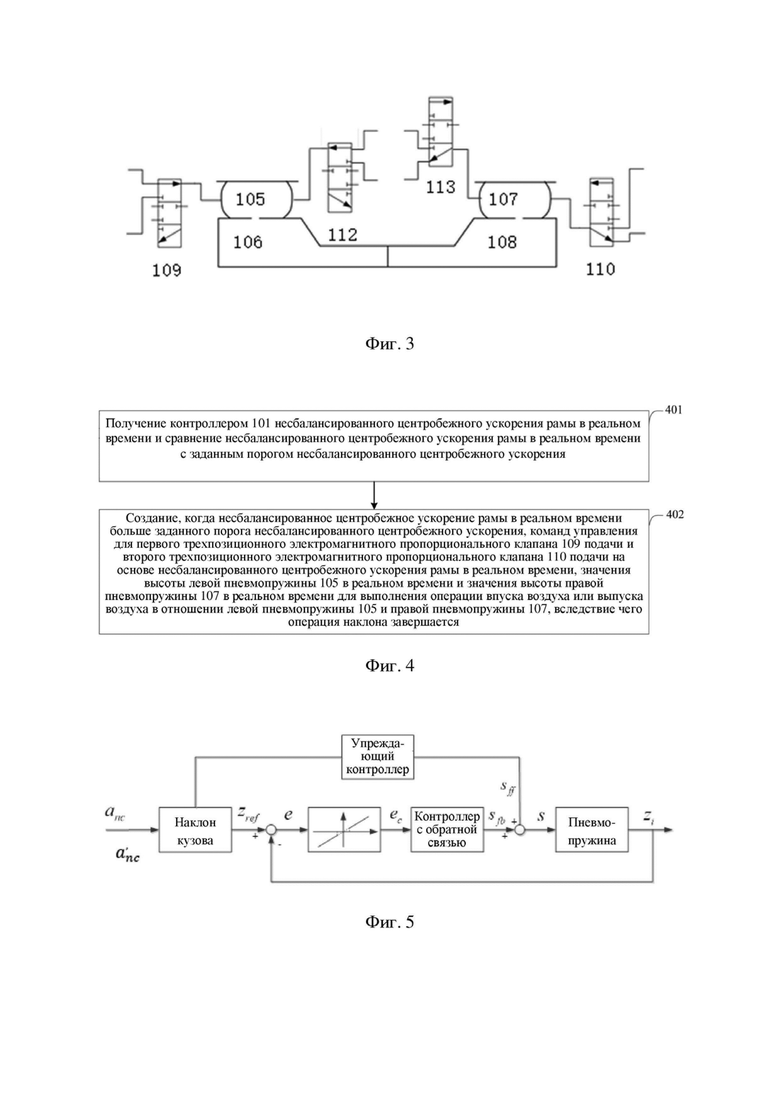
[0045] на фиг. 3 представлена схема системы наклона для железнодорожного транспортного средства в соответствии с другим вариантом осуществления настоящего изобретения;
[0046] на фиг. 4 представлена блок-схема способа управления наклоном в соответствии с вариантом осуществления настоящего изобретения; и
[0047] на фиг. 5 представлена схема, показывающая режим управления комбинацией упреждающего управления и управления с обратной связью в способе управления наклоном железнодорожного транспортного средства в соответствии с вариантом осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ
[0048] Для того, чтобы сделать цели, технические решения и преимущества вариантов осуществления настоящего изобретения более ясными, технические решения в вариантах осуществления настоящего изобретения четко и полностью описаны ниже в сочетании с прилагаемыми графическими материалами в вариантах осуществления настоящего изобретения. Эти варианты осуществления являются частью вариантов осуществления настоящего изобретения, а не всеми вариантами осуществления. Все другие варианты осуществления, полученные специалистом средней квалификации в данной области техники на основе вариантов осуществления настоящего изобретения без каких-либо творческих усилий, относятся к объему защиты настоящего изобретения.
[0049] на фиг. 1 представлена структурная схема системы наклона для железнодорожного транспортного средства в соответствии с вариантом осуществления настоящего изобретения. Как показано на фиг. 1, система наклона для железнодорожного транспортного средства в соответствии с вариантом осуществления настоящего изобретения содержит: контроллер 101, воздушный цилиндр 102 высокого давления, воздушный компрессор (который не показан на фиг. 1), пневмопружины, трехпозиционные электромагнитные пропорциональные клапаны подачи, датчики, клапан 104 разности давлений, вспомогательные воздушные камеры и двухпозиционный переключающий клапан 111. Пневмопружины предусматривают левую пневмопружину 105 и правую пневмопружину 107; вспомогательные воздушные камеры предусматривают левую вспомогательную воздушную камеру 106 и правую вспомогательную воздушную камеру 108; и трехпозиционные электромагнитные пропорциональные клапаны подачи предусматривают первый трехпозиционный электромагнитный пропорциональный клапан 109 подачи и второй трехпозиционный электромагнитный пропорциональный клапан 110 подачи. Воздушный компрессор выполнен с возможностью подачи воздуха высокого давления в воздушный цилиндр 102 высокого давления, а воздушный цилиндр 102 высокого давления выполнен с возможностью подачи воздуха высокого давления в левую пневмопружину 105 через первый трехпозиционный электромагнитный пропорциональный клапан 109 подачи и подачи воздуха высокого давления в правую пневмопружину 107 через второй трехпозиционный электромагнитный пропорциональный клапан 110 подачи. Левая пневмопружина 105 выпускает находящийся в ней воздух в атмосферу через первый трехпозиционный электромагнитный пропорциональный клапан 109 подачи, а правая пневмопружина 107 выпускает находящийся в ней воздух в атмосферу через второй трехпозиционный электромагнитный пропорциональный клапан 110 подачи; причем левая пневмопружина 105 сообщается с левой вспомогательной воздушной камерой 106, а правая пневмопружина 107 сообщается с правой вспомогательной воздушной камерой 108. Клапан 104 разности давлений выполнен с возможностью обеспечения сообщения с левой вспомогательной воздушной камерой 106 и правой вспомогательной воздушной камерой 108 для выполнения выравнивания давления воздуха внутри левой вспомогательной воздушной камеры 106 и правой вспомогательной воздушной камеры 108 по желанию; и двухпозиционный переключающий клапан 111 сообщается с левой вспомогательной воздушной камерой 106 и правой вспомогательной воздушной камерой 108 через трубопроводы соответственно. Датчики предназначены для сбора данных железнодорожного транспортного средства во время движения и передачи собранных данных на контроллер 101; причем контроллер 101 выполнен с возможностью управления первым трехпозиционным электромагнитным пропорциональным клапаном 109 подачи и вторым трехпозиционным электромагнитным пропорциональным клапаном 110 подачи на основе данных, собранных датчиками.
[0050] Компоненты системы наклона для железнодорожного транспортного средства дополнительно описаны ниже.
[0051] Левая пневмопружина 105 установлена ниже левой стороны кузова железнодорожного транспортного средства. Левая пневмопружина 105 сообщается с левой вспомогательной воздушной камерой 106, и воздух может проходить между левой вспомогательной воздушной камерой 106 и левой пневмопружиной 105.
[0052] Правая пневмопружина 107 установлена ниже правой стороны кузова железнодорожного транспортного средства. Правая пневмопружина 107 сообщается с правой вспомогательной воздушной камерой 108, и воздух может проходить между правой вспомогательной воздушной камерой 108 и правой пневмопружиной 107.
[0053] Имеется множество левых пневмопружин 105 и множество правых пневмопружин 107. Например, четыре пневмопружины, включая две левые пневмопружины 105 и две правые пневмопружины 106, содержатся в вагоне железнодорожного транспортного средства.
[0054] Первый трехпозиционный электромагнитный пропорциональный клапан 109 подачи и второй трехпозиционный электромагнитный пропорциональный клапан 110 подачи электрически соединены с контроллером 101 соответственно, и первый трехпозиционный электромагнитный пропорциональный клапан 109 подачи и/или второй трехпозиционный электромагнитный пропорциональный клапан 110 подачи регулируют направление потока воздуха (например, подачу воздуха в пневмопружину или выпуск воздуха из нее) и скорость потока воздуха под управлением контроллера 101.
[0055] В частности, первый трехпозиционный электромагнитный пропорциональный клапан 109 подачи имеет три впускных-выпускных отверстия для воздуха, среди которых первое впускное-выпускное отверстие для воздуха сообщается с воздушным цилиндром 102 высокого давления, второе впускное-выпускное отверстие для воздуха сообщается с атмосферой через выпускную трубу, а третье впускное-выпускное отверстие для воздуха сообщается с левой пневмопружиной 105 через трубопровод. Когда необходимо выпускать воздух в левую пневмопружину 105, первое впускное-выпускное отверстие для воздуха сообщается с третьим впускным-выпускным отверстием для воздуха под управлением контроллера 101, и, поскольку давление воздуха в воздушном цилиндре 102 высокого давления выше, воздух может поступать из воздушного цилиндра 102 высокого давления в левую пневмопружину 105 для подачи воздуха в левую пневмопружину 105. Когда необходимо закрыть левую пневмопружину 105, три впускных-выпускных отверстия для воздуха не сообщаются под управлением контроллера 101 для поддержания устойчивости воздуха внутри левой пневмопружины 105. Когда необходимо выпустить воздух из левой пневмопружины 105, второе впускное-выпускное отверстие для воздуха сообщается с третьим впускным-выпускным отверстием для воздуха под управлением контроллера 101, и, поскольку давление воздуха в левой пневмопружине 105 выше, воздух может поступать из левой пневмопружины 105 в атмосферу для выпуска воздуха из левой пневмопружины 105.
[0056] Второй трехпозиционный электромагнитный пропорциональный клапан 110 подачи имеет три впускных-выпускных отверстия для воздуха, среди которых первое впускное-выпускное отверстие для воздуха сообщается с воздушным цилиндром 102 высокого давления, второе впускное-выпускное отверстие для воздуха сообщается с атмосферой через выпускную трубу, а третье впускное-выпускное отверстие для воздуха сообщается с правой пневмопружиной 107 через трубопровод. Подача, выпуск и закрытие правой пневмопружины 107 могут быть выполнены с использованием второго трехпозиционного электромагнитного пропорционального клапана 110 подачи. Конкретный процесс реализации аналогичен процессу реализации первого трехпозиционного электромагнитного пропорционального клапана 109 подачи для левой пневмопружины 105 и в данном документе не будет повторен.
[0057] Количество первых трехпозиционных электромагнитных пропорциональных клапанов 109 подачи соответствует количеству левых пневмопружин 105, а количество вторых трехпозиционных электромагнитных пропорциональных клапанов 110 подачи соответствует количеству правых пневмопружин 107.
[0058] Датчики предусматривают датчик ускорения и датчики определения высоты пневмопружины.
[0059] На фиг. 2 представлена схема, показывающая установку датчика ускорения. Как показано на фиг. 2, датчик ускорения установлен на боковой балке рамы железнодорожного транспортного средства, и датчик ускорения выполнен с возможностью обнаружения несбалансированного центробежного ускорения рамы.
[0060] Датчики определения высоты пневмопружин выполнены с возможностью определения высоты пневмопружин. Поскольку высота каждой пневмопружины может быть разной, для каждой пневмопружины необходимо предусмотреть датчик определения высоты. В качестве предпочтительной реализации бесконтактный датчик угла наклона используется в качестве датчика определения высоты пневмопружины для уменьшения износа и улучшения надежности.
[0061] Клапан 104 разности давлений сообщается с левой вспомогательной воздушной камерой 106 и правой вспомогательной воздушной камерой 108 через трубопроводы соответственно. Согласно варианту осуществления настоящего изобретения клапан 104 разности давлений, как компонент обеспечения безопасности всей системы, имеет давление открывания, установленное на более высокое значение (например, 250±20 кПа). При нормальных обстоятельствах, даже когда железнодорожное транспортное средство находится в состоянии максимального наклона, клапан 104 разности давлений все еще находится в закрытом состоянии; причем при нахождении в состоянии неисправности, если в пневмопружина на стороне полностью отсутствует воздух, разность давлений между левой и правой пневмопружинами достигает порога открытия клапана 104 разности давлений, и клапан 104 разности давлений автоматически открывается, что уменьшает разницу высот левой и правой пневмопружин и, таким образом, обеспечивает безопасную эксплуатацию железнодорожного транспортного средства.
[0062] Клапан 104 разности давлений, как компонент обеспечения безопасности всей системы, будет открываться только при самых неблагоприятных состояниях отказа, чтобы срочно уравновесить разность давлений воздуха между левой вспомогательной воздушной камерой 106 и правой вспомогательной воздушной камерой 108. Двухпозиционный переключающий клапан 111, как обычный компонент, закрывается, когда железнодорожное транспортное средство въезжает на участок с переходным изгибом и/или участок с круговым изгибом (когда железнодорожное транспортное средство движется по изогнутому участку дороги, участок изменяется следующим образом: прямая линия – въезд на переходной изгиб – круговая кривая – выезд из переходного изгиба – прямая линия), вследствие чего воздушные амортизаторы с обеих сторон сохраняют разницу высот, и двухпозиционный переключающий клапан 111 открывается, когда железнодорожное транспортное средство покидает участок с переходным изгибом, вследствие чего воздушные амортизаторы с обеих сторон восстанавливаются до одинаковой высоты. Когда железнодорожное транспортное средство движется по прямой линии, двухпозиционный переключающий клапан 111 также закрыт.
[0063] В системе наклона для железнодорожного транспортного средства в соответствии с вариантами осуществления настоящего изобретения разница высот между левой пневмопружиной 105 и правой пневмопружиной 107 может регулироваться на основе состояния движения железнодорожного транспортного средства, таким образом, угол наклона регулируется, что предпочтительно для балансирования центробежной силы, создаваемой железнодорожным транспортным средством при движении по изогнутым участкам дороги.
[0064] На основе любого из вышеуказанных вариантов осуществления на фиг. 3 представлена схема системы наклона для железнодорожного транспортного средства в соответствии с другим вариантом осуществления настоящего изобретения. Как показано на фиг. 3, система наклона для железнодорожного транспортного средства в соответствии с другим вариантом осуществления настоящего изобретения дополнительно содержит: третий трехпозиционный электромагнитный клапан 112 и четвертый трехпозиционный электромагнитный клапан 113, причем
[0065] третий трехпозиционный электромагнитный клапан 112 сообщается с воздушным цилиндром 102 высокого давления, левой пневмопружиной 105 и атмосферой соответственно; четвертый трехпозиционный электромагнитный клапан 113 сообщается с воздушным цилиндром 102 высокого давления, правой пневмопружиной 107 и атмосферой соответственно; и третий трехпозиционный электромагнитный клапан 112 и четвертый трехпозиционный электромагнитный клапан 113 управляются контроллером 101 для открытия и закрытия.
[0066] В варианте осуществления настоящего изобретения третий трехпозиционный электромагнитный клапан 112 и четвертый трехпозиционный электромагнитный клапан 113 дополнительно предусмотрены для системы наклона для железнодорожного транспортного средства. Третий трехпозиционный электромагнитный клапан 112 соединен параллельно с первым трехпозиционным электромагнитным пропорциональным клапаном 109 подачи и может увеличить скорость впуска воздуха или скорость выпуска воздуха левой пневмопружины 105 путем взаимодействия с первым трехпозиционным электромагнитным пропорциональным клапаном 109 подачи. Четвертый трехпозиционный электромагнитный клапан 113 соединен параллельно со вторым трехпозиционным электромагнитным пропорциональным клапаном 110 подачи и может увеличить скорость впуска воздуха или скорость выпуска воздуха правой пневмопружины 107 путем взаимодействия со вторым трехпозиционным электромагнитным пропорциональным клапаном 110 подачи.
[0067] Каждый из третьего трехпозиционного электромагнитного клапана 112 и четвертого трехпозиционного электромагнитного клапана 113 может быть трехпозиционным электромагнитным переключающим клапаном или трехпозиционным электромагнитным пропорциональным клапаном подачи. Он может быть выбран в соответствии с фактическими потребностями.
[0068] За счет дополнительного размещения электромагнитных клапанов система наклона для железнодорожного транспортного средства в соответствии с вариантом осуществления настоящего изобретения может увеличить скорость впуска воздуха или скорость выпуска воздуха пневмопружины, что предпочтительно для быстрой регулировки положения железнодорожного транспортного средства и уменьшения влияния центробежной силы на комфорт пассажиров.
[0069] На основе любого из предыдущих вариантов осуществления на фиг. 4 представлена блок-схема способа управления наклоном в соответствии с вариантом осуществления настоящего изобретения. Как показано на фиг. 4, способ управления наклоном в соответствии с вариантом осуществления настоящего изобретения включает следующие этапы.
[0070] Этап 401, предусматривающий получение контроллером 101 несбалансированного центробежного ускорения рамы в реальном времени и сравнение несбалансированного центробежного ускорения рамы в реальном времени с заданным порогом несбалансированного центробежного ускорения.
[0071] На этом этапе несбалансированное центробежное ускорение рамы в реальном времени получается датчиком ускорения, расположенным на боковой балке рамы железнодорожного транспортного средства, и передается на контроллер 101 датчиком ускорения.
[0072] Порог несбалансированного центробежного ускорения представляет собой максимальное несбалансированное центробежное ускорение, допустимое для железнодорожного транспортного средства. Когда несбалансированное центробежное ускорение рамы в реальном времени меньше порога несбалансированного центробежного ускорения, считается, что железнодорожное транспортное средство движется по прямой дороге или изогнутой дороге с достаточным возвышением, и система переходит в режим регулировки высоты. Когда несбалансированное центробежное ускорение рамы в реальном времени больше порога несбалансированного центробежного ускорения или равно ему, считается что необходимо сбалансировать центробежное ускорение железнодорожного транспортного средства, и система переходит в режим активного наклона. В варианте осуществления настоящего изобретения будет дополнительно описан процесс реализации режима активного наклона.
[0073] Этап 402, предусматривающий создание, когда несбалансированное центробежное ускорение рамы в реальном времени больше заданного порога несбалансированного центробежного ускорения, команд управления для первого трехпозиционного электромагнитного пропорционального клапана 109 подачи и второго трехпозиционного электромагнитного пропорционального клапана 110 подачи на основе несбалансированного центробежного ускорения рамы в реальном времени, значения высоты левой пневмопружины 105 в реальном времени и значения высоты правой пневмопружины 107 в реальном времени для выполнения операции впуска воздуха или выпуска воздуха в отношении левой пневмопружины 105 и правой пневмопружины 107, вследствие чего операция наклона завершается.
[0074] Когда несбалансированное центробежное ускорение рамы в реальном времени больше заданного порога несбалансированного центробежного ускорения, железнодорожное транспортное средство переходит в режим активного наклона.
[0075] В режиме активного наклона, команды управления для первого трехпозиционного электромагнитного пропорционального клапана 109 подачи и второго трехпозиционного электромагнитного клапана 110 подачи создаются на основе несбалансированного центробежного ускорения рамы в реальном времени, значения высоты левой пневмопружины 105 в реальном времени и значения высоты правой пневмопружины 107 в реальном времени для выполнения операции впуска воздуха или выпуска воздуха в отношении левой пневмопружины 105 и правой пневмопружины 107, вследствие чего операция наклона завершается. В других вариантах осуществления настоящего изобретения будет дополнительно описан конкретный процесс создания команд управления.
[0076] В способе управления наклоном железнодорожного транспортного средства в соответствии с вариантами осуществления настоящего изобретения разницу высот между левой пневмопружиной 105 и правой пневмопружиной 107 можно регулировать на основе состояния движения железнодорожного транспортного средства, таким образом, угол наклона регулируется, что предпочтительно для балансирования центробежной силы, создаваемой железнодорожным транспортным средством при движении по изогнутым участкам дороги.
[0077] На основе любого из вышеуказанных вариантов осуществления, согласно варианту осуществления создание команд управления для первого трехпозиционного электромагнитного пропорционального клапана 109 подачи и второго трехпозиционного электромагнитного пропорционального клапана 110 подачи на основе несбалансированного центробежного ускорения рамы в реальном времени, значения высоты левой пневмопружины 105 в реальном времени и значения высоты правой пневмопружины 107 в реальном времени предусматривает:
[0078] вычисление угла наклона кузова железнодорожного транспортного средства на основе несбалансированного центробежного ускорения рамы в реальном времени;
[0079] вычисление целевого значения разницы высот между левой пневмопружиной и правой пневмопружиной на основе угла наклона кузова железнодорожного транспортного средства;
[0080] вычисление целевого значения изменения высоты левой пневмопружины, целевого значения изменения высоты правой пневмопружины, значения скорости изменения высоты левой пневмопружины и значения скорости изменения высоты правой пневмопружины на основе целевого значения разницы высот между левой пневмопружиной и правой пневмопружиной; и
[0081] создание команд управления для первого трехпозиционного электромагнитного пропорционального клапана 109 подачи и второго трехпозиционного электромагнитного пропорционального клапана 110 подачи на основе полученного значения высоты левой пневмопружины 105 в реальном времени и значения высоты правой пневмопружины 107 в реальном времени в сочетании с целевым значением изменения высоты левой пневмопружины 105, целевым значением изменения высоты правой пневмопружины 107, значением скорости изменения высоты левой пневмопружины 105 и значением скорости изменения высоты правой пневмопружины 107.
[0082] В частности, в варианте осуществления настоящего изобретения угол наклона кузова железнодорожного транспортного средства рассчитывается на основе несбалансированного центробежного ускорения рамы в реальном времени с использованием следующего уравнения:
[0083] Где θref является углом наклона кузова железнодорожного транспортного средства, αnc является несбалансированным центробежным ускорением рамы в реальном времени; αnc0 является допустимым максимальным несбалансированным центробежным ускорением, которое является заданным значением; и g является гравитационным ускорением.
[0084] Целевое значение разницы высот между левой пневмопружиной 105 и правой пневмопружиной 107 рассчитывается на основе угла наклона кузова железнодорожного транспортного средства с использованием следующего уравнения:
 .
.
[0085] Где  представляет собой целевое значение разницы высот между левой пневмопружиной 105 и правой пневмопружиной 107; и 2b является поперечным промежутком между левой пневмопружиной 105 и правой пневмопружиной 107, который является фактическим измеряемым значением.
представляет собой целевое значение разницы высот между левой пневмопружиной 105 и правой пневмопружиной 107; и 2b является поперечным промежутком между левой пневмопружиной 105 и правой пневмопружиной 107, который является фактическим измеряемым значением.
[0086] Предполагая, что текущие значения высоты левой пневмопружины 105 и правой пневмопружины 107 оба имеют одинаковое исходное значение, целевое значение разницы высот между левой пневмопружиной 105 и правой пневмопружиной 107 может быть дополнительно разложено на целевое значение изменения высоты левой пневмопружины 105 и целевое значение изменения высоты правой пневмопружины 107.
[0087] Возьмем в качестве примера подъем левой пневмопружины 105 и опускание правой пневмопружины 107:
 .
.
[0088] В этом уравнении  представлено целевое значение высоты подъема левой пневмопружины 105 и
представлено целевое значение высоты подъема левой пневмопружины 105 и  представлено целевое значение высоты опускания правой пневмопружины 107.
представлено целевое значение высоты опускания правой пневмопружины 107.
 [0089] рассчитывается по следующему уравнению:
[0089] рассчитывается по следующему уравнению:
 .
.
[0090] Где  представляет собой максимально допустимую высоту опускания правой пневмопружины 107, которая является заданным значением.
представляет собой максимально допустимую высоту опускания правой пневмопружины 107, которая является заданным значением.
 [0091] рассчитывается по следующему уравнению:
[0091] рассчитывается по следующему уравнению:
 .
.
[0092] Где  представляет собой максимально допустимую высоту подъема левой пневмопружины 105, которая является заданным значением.
представляет собой максимально допустимую высоту подъема левой пневмопружины 105, которая является заданным значением.
[0093] После получения целевых значений изменения высоты левой пневмопружины 105 и правой пневмопружины 107 целевые значения изменения высоты могут быть дифференцированы для получения значения скорости изменения высоты.
[0094] После целевого значения изменения высоты левой пневмопружины 105 получают целевое значение изменения высоты правой пневмопружины 107, значение скорости изменения высоты левой пневмопружины 105 и значение скорости изменения высоты правой пневмопружины 107, при этом соответствующие команды управления для первого трехпозиционного электромагнитного пропорционального клапана 109 подачи и второго трехпозиционного электромагнитного пропорционального клапана 110 подачи создаются на основе этих значений в сочетании со значением высоты левой пневмопружины 105 в реальном времени и значением высоты правой пневмопружины 107 в реальном времени.
[0095] Что касается способа управления наклоном настоящего варианта осуществления, угол наклона кузова железнодорожного транспортного средства рассчитывается на основе несбалансированного центробежного ускорения рамы железнодорожного транспортного средства в реальном времени, а затем вычисляется целевое значение изменения высоты и значение скорости изменения высоты пневмопружин, и, наконец, создаются команды управления для трехпозиционных электромагнитных пропорциональных клапанов подачи, что является преимущественным для точного управления наклоном железнодорожного транспортного средства и балансирования центробежной силы, создаваемой железнодорожным транспортным средством, когда оно движется по изогнутым участкам дороги.
[0096] На основе любого из вышеуказанных вариантов осуществления, согласно варианту осуществления создание команд управления для первого трехпозиционного электромагнитного пропорционального клапана 109 подачи и второго трехпозиционного электромагнитного пропорционального клапана 110 подачи на основе несбалансированного центробежного ускорения рамы в реальном времени, значения высоты левой пневмопружины 105 в реальном времени и значения высоты правой пневмопружины 107 в реальном времени предусматривает:
[0097] вычисление скорости изменения несбалансированного центробежного ускорения рамы в реальном времени на основе несбалансированного центробежного ускорения рамы в реальном времени; и получение величины упреждающего управления левой пневмопружины 105 и величины упреждающего управления правой пневмопружины 107 на основе скорости изменения несбалансированного центробежного ускорения рамы в реальном времени;
[0098] вычисление целевого значения высоты левой пневмопружины 105 и целевого значения высоты правой пневмопружины 107 на основе несбалансированного центробежного ускорения рамы в реальном времени;
[0099] определение величины управления с обратной связью левой пневмопружины 105 на основе значения высоты левой пневмопружины 105 в реальном времени и целевого значения высоты левой пневмопружины 105; и определение величины управления с обратной связью правой пневмопружины 107 на основе значения высоты правой пневмопружины 107 в реальном времени и целевого значения высоты правой пневмопружины 107; и
[00100] создание команды управления для первого трехпозиционного электромагнитного пропорционального клапана 109 подачи на основе величины управления с обратной связью левой пневмопружины 105 и величины упреждающего управления левой пневмопружины 105; и создание команды управления для второго трехпозиционного электромагнитного пропорционального клапана 110 подачи на основе величины управления с обратной связью правой пневмопружины 107 и величины упреждающего управления правой пневмопружины 107.
[00101] В предыдущих вариантах осуществления настоящего изобретения теоретически описано, как вычислить угол наклона кузова железнодорожного транспортного средства на основе несбалансированного центробежного ускорения рамы железнодорожного транспортного средства в реальном времени, а затем вычислить целевое значение изменения высоты и значение скорости изменения высоты пневмопружин и, наконец, создать команды управления для трехпозиционных электромагнитных пропорциональных клапанов подачи. Однако при фактической работе точность и показатели управления в реальном времени сильно зависят от внешних помех и временной задержки в процессе обработки данных. Следовательно, в варианте осуществления настоящего изобретения процесс создания команд управления для электромагнитных пропорциональных клапанов подачи может быть выполнен путем комбинирования величин упреждающего управления и величин управления с обратной связью.
[00102] На фиг. 5 представлена схема, показывающая режим управления комбинацией упреждающего управления и управления с обратной связью в способе управления наклоном железнодорожного транспортного средства в соответствии с вариантом осуществления настоящего изобретения. Как показано на фиг. 5, скорость изменения  несбалансированного центробежного ускорения рамы в реальном времени (например, дифференциальное значение несбалансированного центробежного ускорения в реальном времени) вычисляется на основе несбалансированного центробежного ускорения
несбалансированного центробежного ускорения рамы в реальном времени (например, дифференциальное значение несбалансированного центробежного ускорения в реальном времени) вычисляется на основе несбалансированного центробежного ускорения  рамы в реальном времени. Упреждающий контроллер получает величину упреждающего управления
рамы в реальном времени. Упреждающий контроллер получает величину упреждающего управления левой (правой) пневмопружины путем, например, умножения скорости изменения несбалансированного центробежного ускорения рамы в реальном времени на экспериментально измеренный пропорциональный коэффициент, основанный на скорости изменения
левой (правой) пневмопружины путем, например, умножения скорости изменения несбалансированного центробежного ускорения рамы в реальном времени на экспериментально измеренный пропорциональный коэффициент, основанный на скорости изменения  несбалансированного центробежного ускорения рамы в реальном времени, и сравнивает фактические значения высоты
несбалансированного центробежного ускорения рамы в реальном времени, и сравнивает фактические значения высоты  левой (правой) пневмопружины с целевыми значениями высоты
левой (правой) пневмопружины с целевыми значениями высоты  левой (правой) пневмопружины (которые могут быть получены с помощью целевого значения изменения высоты и исходного значения высоты пневмопружины). Когда разница e между фактическими значениями высоты левой (правой) пневмопружины и целевыми значениями высоты
левой (правой) пневмопружины (которые могут быть получены с помощью целевого значения изменения высоты и исходного значения высоты пневмопружины). Когда разница e между фактическими значениями высоты левой (правой) пневмопружины и целевыми значениями высоты левой (правой) пневмопружины находится за пределами заданного интервального диапазона (порога), контроллер с обратной связью создает величину управления с обратной связью
левой (правой) пневмопружины находится за пределами заданного интервального диапазона (порога), контроллер с обратной связью создает величину управления с обратной связью  на основе разницы,
на основе разницы,  оцененной по порогу (например, полученному с использованием алгоритма PID), а затем получает конечную величину управления s (
оцененной по порогу (например, полученному с использованием алгоритма PID), а затем получает конечную величину управления s ( ) на основе величины управления с обратной связью и величины упреждающего управления . Операция впуска воздуха или выпуска воздуха на левой (правой) пневмопружине регулируется на основе величины управления s до тех пор, пока разница между фактическим значением высоты левой (правой) пневмопружины и целевым значением высоты левой (правой) пневмопружины не окажется в пределах заданного интервального диапазона, таким образом, реализуется действие наклона железнодорожного транспортного средства.
) на основе величины управления с обратной связью и величины упреждающего управления . Операция впуска воздуха или выпуска воздуха на левой (правой) пневмопружине регулируется на основе величины управления s до тех пор, пока разница между фактическим значением высоты левой (правой) пневмопружины и целевым значением высоты левой (правой) пневмопружины не окажется в пределах заданного интервального диапазона, таким образом, реализуется действие наклона железнодорожного транспортного средства.
[00103] Упреждающее управление является способом управления с прогнозированием, который может компенсировать сигнал управления в следующий момент на основе тенденции изменения наблюдаемой величины, вследствие чего фактический сигнал управления ближе к идеальному значению.
[00104] В способе управления наклоном железнодорожного транспортного средства в соответствии с вариантами осуществления настоящего изобретения упреждающее управление и управление с обратной связью сочетают, таким образом, создаются команды управления для электромагнитных пропорциональных клапанов подачи. Это является преимущественным для улучшения скорости реагирования.
[00105] На основании любого из вышеуказанных вариантов осуществления в варианте осуществления способ дополнительно включает:
[00106] когда железнодорожное транспортное средство съезжает с изогнутого участка дороги, балансировку левой пневмопружины 105 и правой пневмопружины 107.
[00107] Когда железнодорожное транспортное средство съезжает с участка дороги с переходным изгибом, несбалансированное центробежное ускорение рамы в реальном времени постепенно уменьшается, и наружная пневмопружина начинает выпускать воздух, а высота наружной пневмопружины уменьшается. Когда значения отклонения по высоте пневмопружин с обеих сторон равны, открывается двухпозиционный регулирующий переключающий клапан, вследствие чего воздух внутри наружной пневмопружины поступает во внутреннюю пневмопружину, а левая и правая пневмопружины возвращаются в сбалансированное состояние.
[00108] Специалистам в данной области техники может быть легко понятно, что наружная пневмопружина, описанная в варианте осуществления настоящего изобретения, представляет собой пневмопружину с относительно большей высотой левой пневмопружины 105 и правой пневмопружины 107, а внутренняя пневмопружина представляет собой пневмопружину с относительно меньшей высотой левой пневмопружины 105 и правой пневмопружины 107. Значение отклонения по высоте пневмопружины представляет собой разницу между значением высоты левой и правой пневмопружин в реальном времени и целевым значением высоты левой и правой пневмопружин. Например, значение отклонения по высоте левой пневмопружины представляет собой разницу между значением высоты левой пневмопружины в реальном времени и целевым значением высоты левой пневмопружины; и значение отклонения по высоте правой пневмопружины представляет собой разницу между значением высоты правой пневмопружины в реальном времени и целевым значением высоты правой пневмопружины.
[00109] В способе управления наклоном железнодорожного транспортного средства в соответствии с вариантами осуществления настоящего изобретения разницу высот между левой пневмопружиной 105 и правой пневмопружиной 107 можно регулировать на основе состояния движения железнодорожного транспортного средства, таким образом, угол наклона регулируется, что предпочтительно для балансирования центробежной силы, создаваемой железнодорожным транспортным средством при движении по изогнутым участкам дороги.
[00110] На основании любого из вышеуказанных вариантов осуществления в варианте осуществления способ дополнительно включает:
[00111] когда несбалансированное центробежное ускорение рамы в реальном времени меньше или равно заданному порогу несбалансированного центробежного ускорения, получение контроллером 101 значения высоты левой пневмопружины 105 в реальном времени и значения высоты правой пневмопружины 107 в реальном времени и вычисление первого значения отклонения по высоте на основе значения высоты левой пневмопружины 105 в реальном времени и второго значения отклонения по высоте на основе значения высоты правой пневмопружины 107 в реальном времени; и
[00112] сравнение первого значения отклонения по высоте с заданным первым интервалом и, когда первое значение отклонения по высоте находится за пределами первого интервала, регулирование высоты левой пневмопружины 105 путем управления первым трехпозиционным электромагнитным пропорциональным клапаном 109 подачи, и сравнение второго значения отклонения по высоте с заданным вторым интервалом, и, когда второе значение отклонения по высоте находится за пределами второго интервала, регулирование высоты правой пневмопружины 107 путем управления вторым трехпозиционным электромагнитным пропорциональным клапаном 110 подачи.
[00113] В настоящем варианте осуществления, когда несбалансированное центробежное ускорение рамы в реальном времени меньше заданного порога несбалансированного центробежного ускорения или равно ему, железнодорожное транспортное средство переходит в режим регулирования высоты.
[00114] В конкретной реализации значение высоты левой пневмопружины 105 в реальном времени может быть получено с помощью датчика определения высоты, предусмотренного для левой пневмопружины 105, а высота правой пневмопружины 107 в реальном времени может быть получена с помощью датчика определения высоты, предусмотренного для правой пневмопружины 107.
[00115] После получения значения высоты левой пневмопружины 105 в реальном времени и значения высоты правой пневмопружины 107 в реальном времени от соответствующих датчиков контроллер 101 сравнивает значение высоты левой пневмопружины 105 в реальном времени с заданным первым целевым значением высоты, чтобы получить первое значение отклонения по высоте левой пневмопружины 105, и сравнивает значение высоты правой пневмопружины 107 в реальном времени с заданным вторым целевым значением высоты, чтобы получить второе значение отклонения по высоте правой пневмопружины 107. Первое целевое значение высоты и второе целевое значение высоты устанавливаются в соответствии с фактическими потребностями, и они могут быть одинаковыми или разными.
[00116] Необходимость регулирования высоты левой и правой пневмопружин и как регулировать высоту левой и правой пневмопружин регулируется отдельно. Взяв в качестве примера левую пневмопружину 105, сначала определяется, находится ли первое значение отклонения по высоте в пределах заданного первого интервала. Когда первое значение отклонения по высоте находится в пределах первого интервала, это означает, что первое значение отклонения по высоте левой пневмопружины 105 находится в допустимом диапазоне, и, таким образом, высоту левой пневмопружины 105 регулировать не нужно. Когда первое значение отклонения по высоте находится за пределами первого интервала, необходимо отрегулировать высоту левой пневмопружины 105. Во время регулировки то, следует ли увеличивать или уменьшать высоту левой пневмопружины 105, определяется на основе того, является ли первое значение отклонения по высоте положительным или отрицательным. Когда необходимо увеличить высоту левой пневмопружины 105, команда управления создается для первого трехпозиционного электромагнитного пропорционального клапана 109 подачи, и левая пневмопружина 105 впускает воздух через первый трехпозиционный электромагнитный пропорциональный клапан 109 подачи; и когда необходимо уменьшить высоту левой пневмопружины 105, создается команда управления для первого трехпозиционного электромагнитного пропорционального клапана 109 подачи, и левая пневмопружина 105 выпускает воздух через первый трехпозиционный электромагнитный пропорциональный клапан 109 подачи. В процессе впуска воздуха или выпуска воздуха непрерывно измеряется значение высоты левой пневмопружины 105 в реальном времени, и когда первое значение отклонения по высоте находится в пределах заданного первого интервала, операция впуска воздуха или выпуска воздуха в отношении левой пневмопружины 105 прекращается.
[00117] Операция в отношении правой пневмопружины 107 аналогична операции в отношении левой пневмопружины 105, описанной выше.
[00118] Следует отметить, что первый интервальный диапазон и второй интервальный диапазон могут быть одинаковыми или разными, что специально определяется на основе фактической ситуации.
[00119] Согласно способу управления наклоном железнодорожного транспортного средства, когда несбалансированное центробежное ускорение рамы железнодорожного транспортного средства в реальном времени меньше заданного порога несбалансированного центробежного ускорения или равно ему, высоту пневмопружин регулируют таким образом, чтобы регулировать состояние железнодорожного транспортного средства и уменьшать влияние центробежной силы на комфорт пассажиров.
[00120] На основе любого из вышеуказанных вариантов осуществления другой вариант осуществления настоящего изобретения обеспечивает железнодорожное транспортное средство, содержащее:
[00121] систему наклона для железнодорожного транспортного средства.
[00122] В железнодорожном транспортном средстве в соответствии с вариантами осуществления настоящего изобретения разницу высот между левой пневмопружиной и правой пневмопружиной можно регулировать на основе состояния движения железнодорожного транспортного средства, таким образом, регулируется угол наклона, что является преимущественным для балансирования центробежной силы, создаваемой железнодорожным транспортным средством при движении по изогнутым участкам дороги.
[00123] Описанные выше варианты осуществления устройства являются лишь иллюстративными, где блоки, описанные как отдельные компоненты, могут быть или не быть физически отдельными, а компоненты, отображаемые как блоки, могут быть или не быть физическими блоками, то есть могут быть расположены в одном и том же месте или распределены по нескольким блокам сети. Некоторые или все модули могут быть выбраны в соответствии с фактическими потребностями для достижения целей решений настоящего варианта осуществления. Специалисты средней квалификации в данной области техники могут понять и реализовать описанные выше варианты осуществления без приложения творческих усилий.
[00124] Благодаря описанию приведенных выше вариантов осуществления специалисты в данной области техники могут четко понять, что различные варианты осуществления могут быть реализованы посредством программного обеспечения и необходимой общей аппаратной платформы и, конечно, с помощью аппаратного обеспечения. Технические решения, упомянутые выше, могут быть осуществлены в виде программного продукта, который хранится на носителе данных, таком как ROM/RAM, магнитный диск, компакт-диск и т.д., содержащего несколько команд, чтобы вызвать выполнение компьютерным устройством (может быть персональным компьютером, сервером или сетевым устройством и т.д.) различных вариантов осуществления или части способов, описанных в различных вариантах осуществления.
[00125] Наконец, следует отметить, что вышеуказанные варианты осуществления используются только для объяснения технических решений настоящего изобретения и не ограничиваются ими; хотя настоящее изобретение было подробно описано со ссылкой на предыдущие варианты осуществления, специалистам в данной области техники следует понимать, что они все еще могут модифицировать технические решения, задокументированные в предыдущих вариантах осуществления, и производить эквивалентные замены части технических характеристик; причем эти модификации и замены не приводят к выходу сущности соответствующих технических решений за рамки объема технических решений различных вариантов осуществления настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневмоподвешивание железнодорожного транспортного средства | 1982 |
|
SU1054155A1 |
| Пневмоподвешивание экипажа железнодорожного транспортного средства | 1982 |
|
SU1062077A1 |
| СПОСОБ УПРАВЛЕНИЯ И ВОЗМОЖНОГО ВОССТАНОВЛЕНИЯ СЦЕПЛЕНИЯ КОЛЕС УПРАВЛЯЕМОЙ ОСИ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2735967C2 |
| Система управления рабочим и экстренным торможением для по меньшей мере одного железнодорожного транспортного средства | 2018 |
|
RU2766912C2 |
| АМОРТИЗИРУЮЩЕЕ УСТРОЙСТВО ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2568533C2 |
| СИСТЕМА УПРАВЛЕНИЯ РАБОЧИМ И ЭКСТРЕННЫМ ТОРМОЖЕНИЕМ ДЛЯ ПО МЕНЬШЕЙ МЕРЕ ОДНОГО ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2018 |
|
RU2766466C2 |
| Система тормозного управления железнодорожного транспортного средства | 1987 |
|
SU1428633A1 |
| СПОСОБ ПРОТИВОПОЖАРНОЙ ЗАЩИТЫ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2699832C1 |
| ГИДРОПРИВОД ОПРОКИДЫВАЮЩЕГО МЕХАНИЗМА ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2605802C2 |
| Электровоздухораспределитель тормоза железнодорожного транспортного средства | 1981 |
|
SU994322A1 |
Группа изобретений относится к железнодорожному транспорту. Система наклона для железнодорожного транспортного средства содержит контроллер, воздушный цилиндр высокого давления, левую и правую пневмопружины, левую и правую вспомогательные воздушные камеры, первый и второй трехпозиционные электромагнитные пропорциональные клапаны подачи, датчики, клапан разности давлений и двухпозиционный переключающий клапан. Причем каждая из пневмопружин сообщается с соответствующей вспомогательной воздушной камерой. Контроллер управляет трехпозиционными клапанами для подачи воздуха из воздушного цилиндра в левую и правую пневмопружины через первый и второй трехпозиционные клапаны соответственно или выпуска воздуха из пневмопружин в атмосферу через трехпозиционные клапаны. Клапан разности давлений выполнен с возможностью сообщения с левой и правой вспомогательными воздушными камерами. Двухпозиционный переключающий клапан сообщается с левой и правой вспомогательными воздушными камерами через трубопроводы. Также заявлены способ управления наклоном и железнодорожное транспортное средство с системой наклона. Технический результат заключается в повышении надежности и упрощении системы наклона. 3 н. и 7 з.п. ф-лы, 5 ил.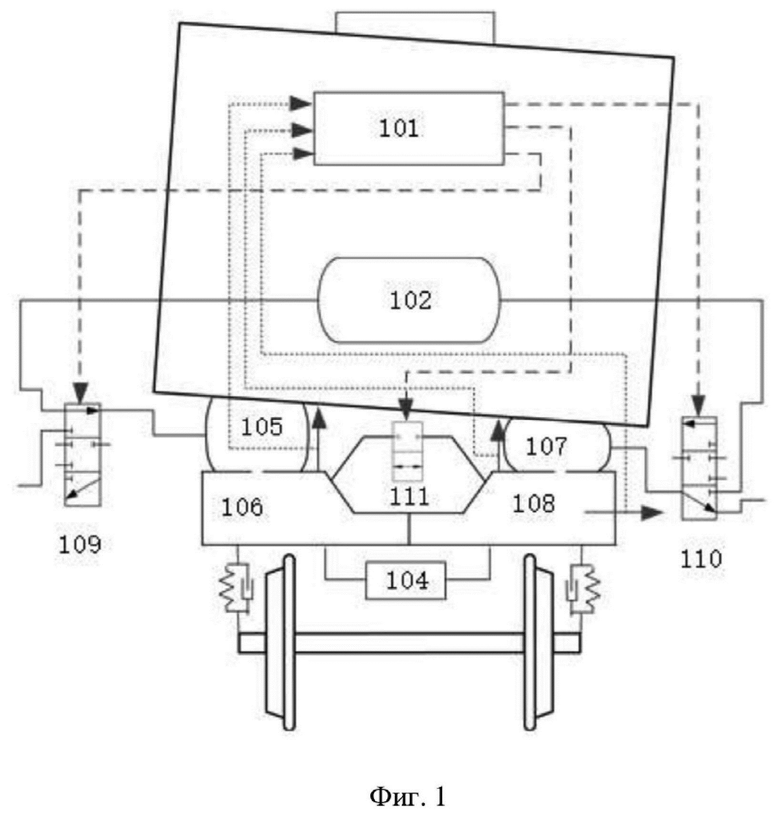
1. Система наклона для железнодорожного транспортного средства, содержащая контроллер (101), воздушный цилиндр (102) высокого давления, левую пневмопружину (105), правую пневмопружину (107), левую вспомогательную воздушную камеру (106), правую вспомогательную воздушную камеру (108), первый трехпозиционный электромагнитный пропорциональный клапан (109) подачи, второй трехпозиционный электромагнитный пропорциональный клапан (110) подачи, датчики, клапан (104) разности давлений и двухпозиционный переключающий клапан (111), причем
левая пневмопружина (105) сообщается с левой вспомогательной воздушной камерой (106), а правая пневмопружина (107) сообщается с правой вспомогательной воздушной камерой (108);
датчики выполнены с возможностью сбора данных железнодорожного транспортного средства во время движения и передачи собранных данных на контроллер (101); контроллер (101) выполнен с возможностью управления первым трехпозиционным электромагнитным пропорциональным клапаном (109) подачи и вторым трехпозиционным электромагнитным пропорциональным клапаном (110) подачи на основе данных, собранных датчиками, вследствие чего воздух высокого давления в воздушном цилиндре (102) высокого давления подается в левую пневмопружину (105) через первый трехпозиционный электромагнитный пропорциональный клапан (109) подачи и подается в правую пневмопружину (107) через второй трехпозиционный электромагнитный пропорциональный клапан (110) подачи, или воздух внутри левой пневмопружины (105) выпускается в атмосферу через первый трехпозиционный электромагнитный пропорциональный клапан (109) подачи, а воздух внутри правой пневмопружины (107) выпускается в атмосферу через второй трехпозиционный электромагнитный пропорциональный клапан (110) подачи; и
клапан (104) разности давлений выполнен с возможностью сообщения с левой вспомогательной воздушной камерой (106) и правой вспомогательной воздушной камерой (108); и двухпозиционный переключающий клапан (111) сообщается с левой вспомогательной воздушной камерой (106) и правой вспомогательной воздушной камерой (108) через трубопроводы соответственно.
2. Система наклона по п. 1, отличающаяся тем, что датчики предусматривают датчик ускорения и датчики определения высоты пневмопружины; причем
датчик ускорения установлен на боковой балке рамы железнодорожного транспортного средства; и
датчики определения высоты пневмопружины установлены в смежных положениях левой пневмопружины (105) и правой пневмопружины (107).
3. Система наклона по п. 1 или 2, отличающаяся тем, что дополнительно содержит третий трехпозиционный электромагнитный клапан (112) и четвертый трехпозиционный электромагнитный клапан (113); причем
третий трехпозиционный электромагнитный клапан (112) сообщается с воздушным цилиндром (102) высокого давления, левой пневмопружиной (105) и атмосферой соответственно; четвертый трехпозиционный электромагнитный клапан (113) сообщается с воздушным цилиндром (102) высокого давления и правой пневмопружиной (107), и атмосферой соответственно; и третий трехпозиционный электромагнитный клапан (112) и четвертый трехпозиционный электромагнитный клапан (113) управляются контроллером (101) для открытия и закрытия.
4. Система наклона по п. 3, отличающаяся тем, что третий трехпозиционный электромагнитный клапан (112) представляет собой трехпозиционный электромагнитный переключающий клапан или трехпозиционный электромагнитный пропорциональный клапан подачи; и/или
четвертый трехпозиционный электромагнитный клапан (113) представляет собой трехпозиционный электромагнитный переключающий клапан или трехпозиционный электромагнитный пропорциональный клапан подачи.
5. Способ управления наклоном на основе системы наклона железнодорожного транспортного средства по любому из пп. 1-4, включающий:
этап S11, предусматривающий получение контроллером (101) несбалансированного центробежного ускорения рамы в реальном времени, полученного датчиком ускорения, и сравнение несбалансированного центробежного ускорения рамы в реальном времени с заданным порогом несбалансированного центробежного ускорения; и
этап S12, предусматривающий создание, когда несбалансированное центробежное ускорение рамы в реальном времени больше заданного порога несбалансированного центробежного ускорения, команд управления для первого трехпозиционного электромагнитного пропорционального клапана (109) подачи и второго трехпозиционного электромагнитного пропорционального клапана (110) подачи на основе несбалансированного центробежного ускорения рамы в реальном времени, значения высоты левой пневмопружины (105) в реальном времени и значения высоты правой пневмопружины (107) в реальном времени для выполнения операции впуска воздуха или выпуска воздуха в отношении левой пневмопружины (105) и правой пневмопружины (107), вследствие чего операция наклона завершается.
6. Способ управления наклоном по п. 5, отличающийся тем, что создание команд управления для первого трехпозиционного электромагнитного пропорционального клапана (109) подачи и второго трехпозиционного электромагнитного пропорционального клапана (110) подачи на основе несбалансированного центробежного ускорения рамы в реальном времени, значения высоты левой пневмопружины (105) в реальном времени и значения высоты правой пневмопружины (107) в реальном времени включает:
вычисление угла наклона кузова железнодорожного транспортного средства на основе несбалансированного центробежного ускорения рамы в реальном времени;
вычисление целевого значения разницы высот между левой пневмопружиной (105) и правой пневмопружиной (107) на основе угла наклона кузова железнодорожного транспортного средства;
вычисление целевого значения изменения высоты левой пневмопружины (105), целевого значения изменения высоты правой пневмопружины (107) и значения скорости изменения высоты левой пневмопружины (105), и значения скорости изменения высоты правой пневмопружины (107) на основе целевого значения разницы высот между левой пневмопружиной (105) и правой пневмопружиной (107); и
создание команд управления для первого трехпозиционного электромагнитного пропорционального клапана (109) подачи и второго трехпозиционного электромагнитного пропорционального клапана (110) подачи на основе полученного значения высоты левой пневмопружины (105) в реальном времени и значения высоты правой пневмопружины (107) в реальном времени в сочетании с целевым значением изменения высоты левой пневмопружины (105), целевым значением изменения высоты правой пневмопружины (107), значением скорости изменения высоты левой пневмопружины (105) и значением скорости изменения высоты правой пневмопружины (107).
7. Способ управления наклоном по п. 5, отличающийся тем, что создание команд управления для первого трехпозиционного электромагнитного пропорционального клапана (109) подачи и второго трехпозиционного электромагнитного пропорционального клапана (110) подачи на основе несбалансированного центробежного ускорения рамы в реальном времени, значения высоты левой пневмопружины (105) в реальном времени и значения высоты правой пневмопружины (107) в реальном времени включает:
вычисление скорости изменения несбалансированного центробежного ускорения рамы в реальном времени на основе несбалансированного центробежного ускорения рамы в реальном времени; и получение величины упреждающего управления левой пневмопружины (105) и величины упреждающего управления правой пневмопружины (107) на основе скорости изменения несбалансированного центробежного ускорения рамы в реальном времени;
вычисление целевого значения высоты левой пневмопружины (105) и целевого значения высоты правой пневмопружины (107) на основе несбалансированного центробежного ускорения рамы в реальном времени;
определение величины управления с обратной связью левой пневмопружины (105) на основе значения высоты левой пневмопружины (105) в реальном времени и целевого значения высоты левой пневмопружины (105); и определение величины управления с обратной связью правой пневмопружины (107) на основе значения высоты правой пневмопружины (107) в реальном времени и целевого значения высоты правой пневмопружины (107); и
создание команды управления для первого трехпозиционного электромагнитного пропорционального клапана (109) подачи на основе величины управления с обратной связью левой пневмопружины (105) и величины упреждающего управления левой пневмопружины (105); и создание команды управления для второго трехпозиционного электромагнитного пропорционального клапана (110) подачи на основе величины управления с обратной связью правой пневмопружины (107) и величины упреждающего управления правой пневмопружины (107).
8. Способ управления наклоном по п. 5, отличающийся тем, что дополнительно включает:
когда железнодорожное транспортное средство съезжает с изогнутого участка дороги, балансировку левой пневмопружины (105) и правой пневмопружины (107), при этом
когда железнодорожное транспортное средство покидает участок дороги с переходным изгибом, несбалансированное центробежное ускорение рамы в реальном времени постепенно уменьшается, и наружная пневмопружина начинает выпускать воздух, и высота наружной пневмопружины уменьшается; когда значение отклонения по высоте левой пневмопружины (105) равно значению отклонения по высоте правой пневмопружины (107), двухпозиционный регулирующий переключающий клапан открывается для того, чтобы позволить воздуху внутри наружной пневмопружины поступать во внутреннюю пневмопружину, вследствие чего левая пневмопружина (105) и правая пневмопружина (107) возвращаются в сбалансированное состояние; при этом
наружная пневмопружина представляет собой пневмопружину с относительно большей высотой левой пневмопружины (105) и правой пневмопружины (107), а внутренняя пневмопружина представляет собой пневмопружину с относительно меньшей высотой левой пневмопружины (105) и правой пневмопружины (107), а значение отклонения по высоте пневмопружины представляет собой разницу между значением высоты пневмопружины в реальном времени и целевым значением высоты пневмопружины.
9. Способ управления наклоном по п. 5, отличающийся тем, что дополнительно включает:
этап S21, предусматривающий, когда несбалансированное центробежное ускорение рамы в реальном времени меньше или равно заданному порогу несбалансированного центробежного ускорения, получение контроллером (101) значения высоты левой пневмопружины (105) в реальном времени и значения высоты правой пневмопружины (107) в реальном времени и вычисление первого значения отклонения по высоте на основе значения высоты левой пневмопружины (105) в реальном времени и второго значения отклонения по высоте на основе значения высоты правой пневмопружины (107) в реальном времени; и
этап S22, предусматривающий сравнение первого значения отклонения по высоте с заданным первым интервалом и, когда первое значение отклонения по высоте находится за пределами первого интервала, регулирование высоты левой пневмопружины (105) путем управления первым трехпозиционным электромагнитным пропорциональным клапаном (109) подачи, и сравнение второго значения отклонения по высоте с заданным вторым интервалом, и, когда второе значение отклонения по высоте находится за пределами второго интервала, регулирование высоты правой пневмопружины (107) путем управления вторым трехпозиционным электромагнитным пропорциональным клапаном (110) подачи.
10. Железнодорожное транспортное средство, содержащее:
систему наклона для железнодорожного транспортного средства по любому из пп. 1-4.
| EP 3623248 A1, 18.03.2020 | |||
| WO 2012049769 A1, 19.04.2012 | |||
| JP 2012232718 A, 29.11.2012 | |||
| Способ заточки ступенчатых сверл | 1986 |
|
SU1379059A1 |
| Передвижная загрузочная машина | 1947 |
|
SU83029A1 |

