Изобретение относится, в целом, к работе светодиодов, причем под ними следует понимать неорганические и органические светодиоды.
В принципе, уже известно снабжение электрической мощностью с помощью источника постоянного тока светодиодной цепи, которая может содержать один или несколько последовательно включенных светодиодов. Также известно применение для регулирования яркости ШИМ-модуляции, так что во время продолжительности включения последовательности ШИМ-импульсов осуществляется названное регулирование постоянного тока. Следовательно, при регулировании яркости изменяется скважность ШИМ-сигнала.
Для вырабатывания питающего напряжения источника постоянного тока можно использовать активно тактируемую PFC-схему (схема коррекции коэффициента мощности).
Наконец, следует также обратить внимание на другие требования при работе светодиодов, например на то, что обычно требуется гальваническая развязка светодиодной цепи и питающего напряжения корректора коэффициента мощности, обычно переменное напряжение сети.
Из описанного выше следует, что для надлежащей и предпочтительной работы светодиодной цепи функционально должны быть предусмотрены несколько схемных блоков (выпрямитель, корректор коэффициента мощности, гальваническая развязка, источник постоянного тока и т.д.). Это приводит к относительному усложнению схем.
В основу изобретения положена задача обеспечения работы светодиодной цепи особенно предпочтительным образом.
Эта задача решается посредством признаков независимых пунктов формулы. В зависимых пунктах особенно предпочтительным образом отображена центральная идея изобретения.
Согласно первому аспекту изобретения, предусмотрена модульная светодиодная система освещения, содержащая первый модуль, на который подается входное напряжение, предпочтительно питающее напряжение переменного тока, и который содержит второй субмодуль, предпочтительно изолирующий блок, на выходе которого вырабатывается гальванически развязанное от питающего напряжения напряжение постоянного тока, и блок управления; второй модуль, содержащий питаемый выходным напряжением постоянного тока первого модуля дополнительный субмодуль, предпочтительно тактируемый источник постоянного тока, управляемый блоком управления второго модуля, и светодиодный модуль, содержащий по меньшей мере одну светодиодную цепь и питаемый дополнительным субмодулем.
Блоки управления первого и второго модулей могут осуществлять связь через коммуникационный интерфейс.
Внутренний обмен данными между первым и вторым модулями может происходить стандартным образом, т.е. независимо от внешней шинной связи первого модуля.
Первый модуль может вырабатывать помимо питающего напряжения постоянного тока для дополнительного субмодуля также постоянное низкое питающее напряжение постоянного тока для второго модуля.
Второй и светодиодный модули могут быть размещены в общем корпусе.
С общим корпусом может быть соединено активное и/или пассивное охлаждающее средство.
Блок управления первого модуля, предпочтительно с разделением потенциалов, может срабатывать посредством интерфейсной схемы через внешнюю шину.
Второй модуль может быть изолированным, передающим энергию DC/DC-преобразователем.
Первый модуль может питать напряжением несколько вторых модулей.
Первый модуль может питать, по меньшей мере, двумя напряжениями постоянного тока разного уровня один или несколько подключенных вторых модулей параллельно.
Другие преимущества, признаки и свойства изобретения содержатся в нижеследующем описании предпочтительных примеров его осуществления со ссылкой на прилагаемые чертежи, на которых изображают:
- фиг.1: строение предложенной модульной светодиодной системы освещения;
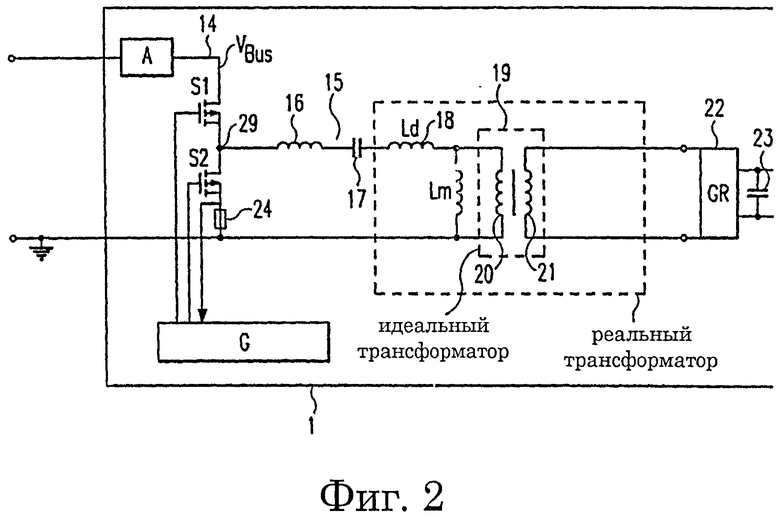
- фиг.2: пример выполнения изолированного DC/DC-преобразователя в виде инвертора с последующим резонансным контуром и трансформатором;
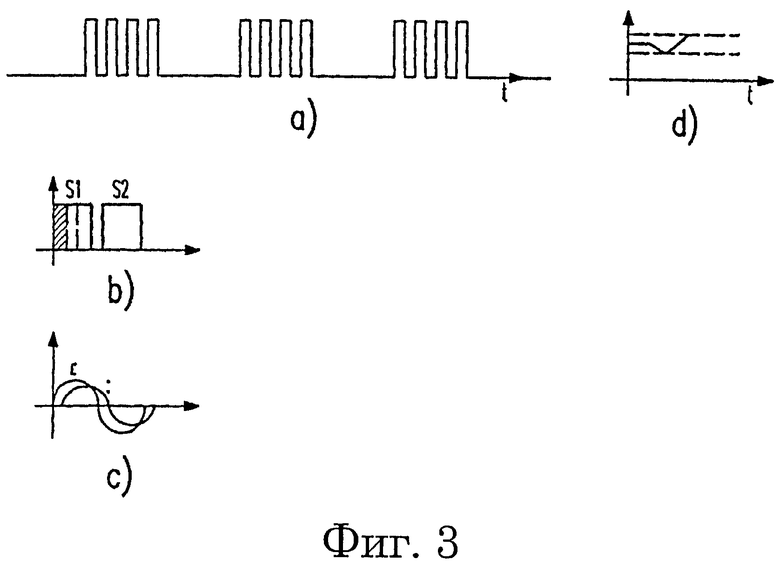
- фиг.3: схематично другие режимы управления DC/DC-преобразователем из фиг.2;
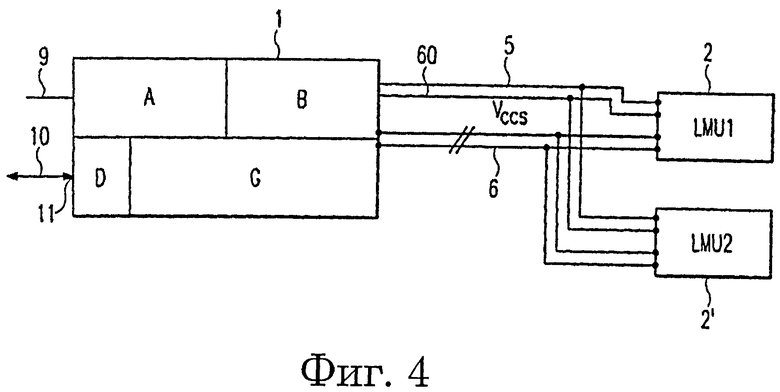
- фиг.4: предложенную связь между одним ведущим и несколькими подчиненными блоками модульной светодиодной системы освещения;
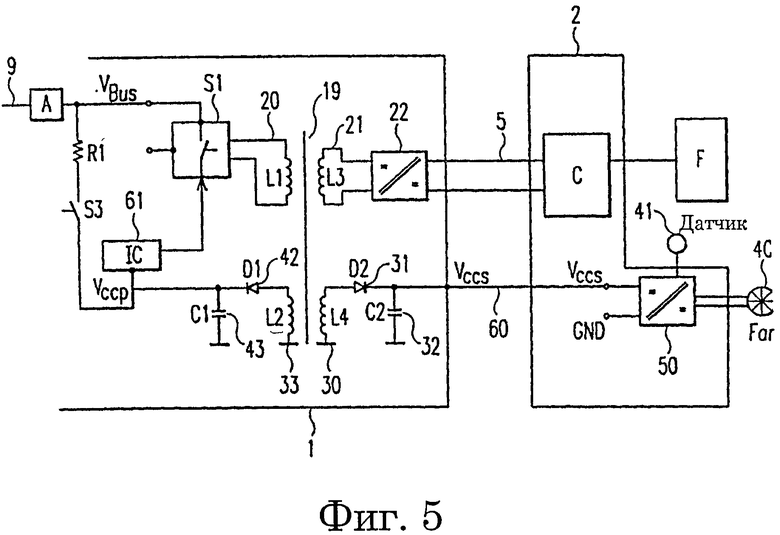
- фиг.5: предложенное вырабатывание низкого напряжения постоянного тока;
- фиг.6а, 6b: светодиодный модуль с несколькими независимыми друг от друга управляемыми каналами.
Общее строение модульной схемы
Ниже следует пояснить общее строение предложенной модульной схемы основанного на светодиодах освещения, например так называемого «Downlight» (встроенный в потолок светильник). Могут использоваться неорганические и/или органические светодиоды.
Как видно на фиг.1, модульная схема содержит первый модуль 1, питаемый преимущественно входным напряжением 9, в частности переменным напряжением сети. Это входное напряжение 9 подается к первому субмодулю A, который обычно выполняет выпрямление переменного напряжения, подаваемого в виде входного напряжения 9, причем тогда выпрямленное переменное напряжение подается к активно тактируемой PFC-схеме субмодуля A (в случае наличия). Выходное напряжение субмодуля A является напряжением постоянного тока, называется ниже шинным напряжением VBus и подается ко второму субмодулю B модуля 1. Субмодуль B выполняет, в основном, функцию гальванической развязки (изоляции) и может содержать для этого в качестве гальванического развязывающего элемента трансформатор. Дополнительно субмодуль B служит для вырабатывания стабилизированного постоянного напряжения - питающего напряжения 5 постоянного тока.
Субмодулем G обозначен блок управления модуля 1, который (блок управления) может быть выполнен, в частности, в виде интегральной схемы, например ASIC (специализированной интегральной схемы) или микропроцессора или их гибрида. Как схематично показано на фиг.1, блок G управляет активными коммутационными элементами субмодуля B, которые могут быть выполнены, например, в виде полумоста (например, полумостового возбудителя и двух последовательно включенных выключателей, фиг.2), который вырабатывает подаваемое к трансформатору 19 субмодуля B переменное напряжение. Блок управления G может располагать программируемыми входами, благодаря чему возможно программирование или калибровочное программирование блока управления G. Для этого выводы блока управления G могут быть выведены на плату субмодуля B, чтобы обеспечить его программирование и, тем самым, блока управления G также после поставки субмодуля B.
Субмодулем B модуля 1 обозначена гальваническая развязка, посредством которой блок управления G модуля 1 связан с субмодулем D в качестве интерфейсной схемы. Эта интерфейсная схема D может содержать интерфейс 11 данных, который может быть выполнен, в частности, для связи внешней аналоговой или цифровой шины 10, например по промышленному стандарту DALI (цифровой адресный интерфейс светорегулирования). В качестве альтернативы или дополнительно по другим стандартам этот интерфейс 11 данных или эта интерфейсная схема D может передавать также одно- или двунаправленные сигналы. Далее в качестве альтернативы или дополнительно этот интерфейс 11 данных или эта интерфейсная схема D может принимать сигналы, формируемые самим интерфейсом 11 данных или интерфейсной схемой D или питаемой извне (например, также входным напряжением 9), нажимаемой вручную клавишей или выключателем.
Основными функциями модуля 1 являются, тем самым, вырабатывание (на выходе субмодуля В) напряжения постоянного тока (за счет выпрямления выходного напряжения трансформатора 19 субмодуля B с помощью выпрямителя 22), исходя из подаваемого входного напряжения 9, и внешняя связь через интерфейс 11 данных или интерфейсную схему D.
В качестве коммутационного модуля предусмотрен преимущественно пространственно отделенный от модуля 1 второй модуль 2. Он выполняет, в основном, функцию так называемого «управления лампами», а это значит, что этот модуль 2, с одной стороны, питает постоянным током подключенные осветительные средства (здесь светодиодную цепь 8 с одним или несколькими светодиодами), а, с другой стороны, получает из зоны светодиодной цепи 8 величины обратной связи (схематично обозначены поз.13).
Таким образом, питающее напряжение 5 постоянного тока на выходе субмодуля B модуля 1 подается к дополнительному субмодулю C в качестве управляемого/регулируемого источника постоянного тока. Следовательно, субмодуль C питает через выход 7 светодиодную цепь 8 постоянным током. При этом модуль 2 может содержать несколько преобразовательных ступеней (несколько дополнительных субмодулей C в качестве источников постоянного тока), причем эти преобразовательные ступени (дополнительные субмодули C в качестве источников постоянного тока) могут управлять соответственно отделенными друг от друга (независимыми) светодиодными цепями 8.
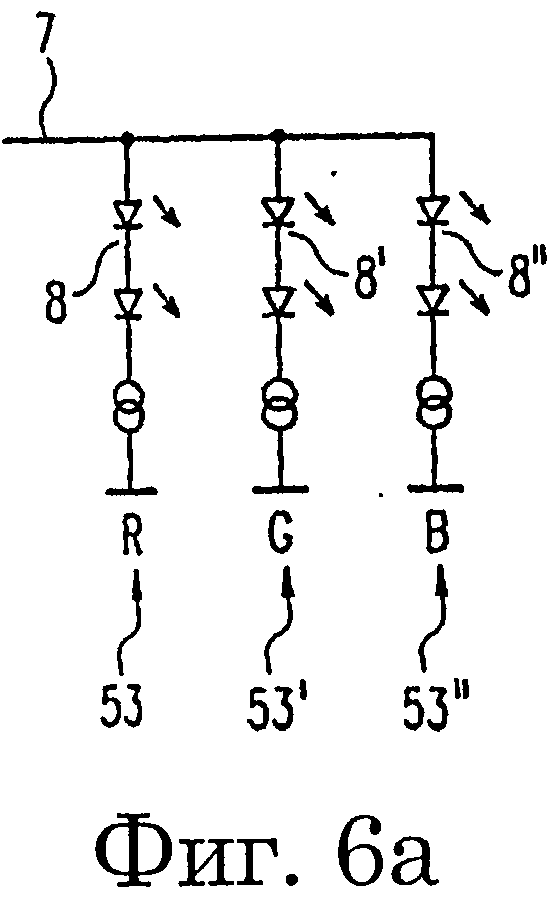
Субмодуль C может быть выполнен в виде тактируемого источника постоянного тока (т.е., например, в виде понижающего преобразователя или в виде изолированного разделительного преобразователя, называемого также обратноходовый преобразователь) или в виде линейного регулятора (реализованного с транзисторами или интегральными схемами). Пример управления посредством линейных регуляторов схематично изображен на фиг.6а.
Модуль 2 содержит собственный блок управления E, который также может быть выполнен в виде микроконтроллера, ASIC или их гибрида. Блок управления E содержит, следовательно, величины обратной связи 13 из зоны светодиодной цепи 8. Блок E управляет одним или несколькими дополнительными субмодулями C в модуле 2. При этом регулируется ток через светодиодную цепь 8, а для правильной работы светодиодов и для обнаружения ошибок могут регистрироваться и контролироваться также другие величины обратной связи, например напряжение светодиодов и температура.
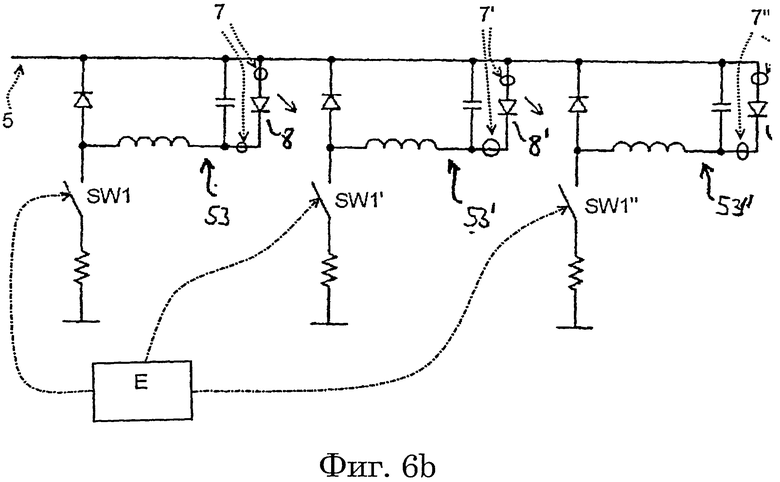
В одном предпочтительном варианте дополнительный субмодуль C выполнен в виде тактируемого источника постоянного тока, причем субмодуль C содержит, по меньшей мере, один активно тактируемый выключатель SW1 в качестве части тактируемого источника постоянного тока. Пример управления посредством тактируемого источника постоянного тока схематично изображен на фиг.6b. Здесь для наглядности не показана регистрация величин обратной связи, например тока и напряжения светодиодов или тока через выключатель SW1. В этом примере светодиоды светодиодных цепей 8, 8', 8” (которые расположены, например на светодиодном модуле F) питаются соответствующим понижающим преобразователем в качестве тактируемого источника постоянного тока через выходы 7, 7', 7”.
При этом активно тактируемым выключателем тактируемого источника постоянного тока непосредственно или косвенно (например, через задающий модуль) управляет блок Е. В отличие от линейного регулятора тактируемый источник постоянного тока обеспечивает гибкую работу различных светодиодных модулей F. Тактируемый источник постоянного тока может устанавливать и согласовывать как напряжение, так и ток через светодиодный модуль F. Тактируемый источник постоянного тока представляет собой активно тактируемый DC/DC-преобразователь, который воспринимает постоянное питающее напряжение 5 и питает светодиодный модуль F в соответствии с нужным током и/или напряжением светодиодов, преимущественно за счет управления блоком E на основе подаваемых к нему величин обратной связи.
Тактируемый источник постоянного тока дает также то преимущество, что режим работы субмодуля C можно согласовать с соответствующим текущим режимом эксплуатации. Так, можно согласовать вид тактирования тактируемого источника постоянного тока, например выключателем SW1 можно управлять с помощью ЧМ-, ШИМ-сигнала или их комбинации. Текущий режим эксплуатации может отличаться, например, от работы при высокой и низкой яркости светодиодной цепи 8.
Как показывает пример на фиг.6b, возможно наличие нескольких тактируемых источников постоянного тока для питания светодиодных цепей 8, 8', 8” через выходы 7, 7', 7”. Преимущественно выключатели SW1, SW1', SW1” отдельных тактируемых источников постоянного тока могут управляться независимо друг от друга блоком Е.
Таким образом, для светодиодных цепей 8, 8', 8” через выходы 7, 7', 7” могут подаваться соответственно индивидуально требуемые токи и напряжения светодиодов. При этом также возможно наличие соответственно отдельного блока управления Е, Е', Е” для каждого тактируемого источника постоянного тока с выключателями SW1, SW1', SW1”.
Как уже сказано, для правильной работы светодиодов и для обнаружения ошибок блок управления E может регистрировать различные величины обратной связи (например, напряжение, ток светодиодов или температуру) и преимущественно при обнаружении ошибки переключать тактируемый источник постоянного тока в ошибочный режим работы. Это может происходить, например, за счет переключения в пакетный режим или в режим с небольшим временем включения выключателя SW1.
Кроме того, блок управления Е через коммуникационный интерфейс 6, который может быть выполнен дополнительно к питающему напряжению 5 постоянного тока, может одно- или двунаправленно обмениваться данными с блоком управления G модуля 1. Коммуникационный интерфейс 6 может использоваться также для передачи низкого питающего напряжения (тогда происходят обмен данными и передача энергии). Коммуникационный интерфейс 6 может быть также интегрирован в питающее напряжение 5 постоянного тока, например можно переключать полярность питающего напряжения 5 или модулировать несущий сигнал до питающего напряжения 5.
Блок управления E через коммуникационный интерфейс 6, например также в случае обнаружения ошибки, может передавать посредством двунаправленного обмена данными извещение об ошибке и преимущественно также информацию о виде ошибки на блок управления G модуля 1.
Как схематично показано на фиг.1, модуль 2, здесь модуль управления лампами, размещен вместе с собственно светодиодным модулем F преимущественно в общем корпусе 12.
Как схематично показано на фиг.1, светодиодный модуль F может содержать собственную память 4, например в виде EPROM (стираемая программируемая память только для чтения). Поз. 3 схематично обозначено, что блок управления Е модуля 2 может иметь доступ к этой памяти 4 светодиодного модуля F.
В отношении модуля 1 следует указать на то, что PFC-схема является лишь факультативной.
Кроме того, следует указать на то, что изображенные функции субмодулей А, В, С схемотехнически могут быть также интегрированы, благодаря чему, если эти функции, в принципе, имеются, они необязательно должны быть отображены в соответствующем строении топологии схемы.
Преимущество модульного строения на фиг.1 состоит в том, что, например, модули 1 и 2 могут производиться разными изготовителями. Кроме того, к одному модулю 1 могут быть подключены также несколько модулей 2 в смысле режима «ведущий-подчиненный». При использовании тактируемых источников постоянного тока в качестве субмодуля С создается, тем самым, двухступенчатая система модульного строения, причем несколько модулей 2 могут быть подключены к одному модулю 1, а также обеспечивается работа разных светодиодных модулей F и/или разная работа одинаковых светодиодных модулей F в зависимости от происходящего через коммуникационный интерфейс 6 обмена данными.
Наконец, модульное строение позволяет также заменять соответствующие субмодули и, в частности, модуль 2 при сохранении остальных компонентов.
Если модуль 2 размещен в общем корпусе 12 с собственно светодиодным модулем F, то возникает то преимущество, что эта комбинация модулей 2 и F может юстироваться, так что ее характеристику излучения, количество света, цвет освещения и/или отклонение света можно параметризировать и, тем самым, настраивать. Модуль 1 и пользователь могут располагать, следовательно, одной или несколькими настроенными системами, которые тогда управляются одинаково и ведут себя соответственно. Эта внутренняя настройка комбинации модулей 2 и F может осуществляться, например, одним из следующих способов:
- настройка при изготовлении или пуске в эксплуатацию;
- замкнутая система регулирования внутри этой комбинации (например, посредством внутренней сенсорной системы);
- опорные значения;
- способ с охарактеризованием светодиодов;
- или комбинация названных способов.
Связь между модулями 1 и 2 через коммуникационный интерфейс 6 происходит в соответствии с этим преимущественно стандартным путем.
Команды или запросы, поступающие извне, например, по внешней шине 10 через интерфейс данных 11, подаются, как показано, только к модулю 1. Таким образом, это можно назвать также внешним обменом данных в противоположность внутреннему обмену данными через коммуникационный интерфейс 6 между модулями 1 и 2.
Это имеет то преимущество, что для согласования к разным внешним шинам 10 следует согласовать только модуль 1, тогда как строение и протокол данных для модуля 2 остаются незатронутыми.
Связь через внутренний коммуникационный интерфейс 6 является, тем самым, также стандартной, поскольку она не зависит от различных, прикладываемых к модулю 1 шинных протоколов или управляющих сигналов.
Связь через внутренний коммуникационный интерфейс 6 в комбинации с модульным строением системы дает то преимущество, что от модуля 2 могут передаваться эксплуатационные данные для его оптимального питания. Модуль 2 (преимущественно посредством блока управления Е) может передавать требуемые эксплуатационные данные через внутренний коммуникационный интерфейс 6 на модуль 1. Это дает то преимущество, что модуль 1 может комбинироваться с большим числом различных модулей 2, причем требуемые эксплуатационные данные могут при этом считываться из модуля 2.
Примерами величин 13 обратной связи от светодиодной цепи 8 являются непосредственно или косвенно измеренный ток светодиодов и/или напряжение над ней.
В памяти 4, приданной светодиодному модулю F, например у изготовителя, могут храниться эксплуатационные данные светодиодов светодиодной цепи 8. Этими данными в памяти 4 могут быть, например, параметры, допустимые максимальные значения тока и/или напряжения, температурная зависимость электрических или оптических (спектров) параметров светодиодов и т.д. Также эти эксплуатационные данные светодиодов (например, данные из памяти 4) могут передаваться через внутренний коммуникационный интерфейс 6 на модуль 1.
Как уже вкратце упоминалось выше, модуль 1 в смысле «ведущего» может питать несколько модулей 2. Это значит, что единственный модуль 1 питает несколько модулей 2 не только питающим напряжением 5 постоянного тока, но и двунаправленно связан с ними в смысле внутреннего коммуникационного интерфейса 6.
Как уже вкратце пояснялось выше, блок управления G в модуле 1 может управлять субмодулем В, который выполнен преимущественно тактируемьм. Тот же блок управления G или преимущественно также дополнительный блок управления (не показан) может регулировать также работу корректора коэффициента мощности субмодуля А, т.е., например, управлять выключателем корректора коэффициента мощности субмодуля А и для сигналов из зоны корректора коэффициента мощности принимать, например, входное напряжение, ток через индуктивность корректора коэффициента мощности, ток через выключатель корректора коэффициента мощности, выходное напряжение корректора коэффициента мощности, как это схематично обозначено стрелками на фиг.1.
Корректор коэффициента мощности может представлять собой, например, повышающий преобразователь, разделительный преобразователь (понижающе-повышающий преобразователь), изолированный разделительный преобразователь (обратноходовый преобразователь) или преобразователь SEPIC (преобразователь с несимметрично нагруженной первичной индуктивностью).
При этом обычно выходное напряжение (шинное напряжение) Vnus корректора коэффициента мощности субмодуля А лежит в диапазоне в несколько сот вольт. За счет трансформатора 19 в субмодуле В это напряжение постоянного тока может быть, тем самым, понижено, например до напряжения в диапазоне 20-60 В, преимущественно 40-50 В постоянного тока. Таким образом, питающее напряжение 5 постоянного тока после выхода модуля 1 лежит на более низком уровне, чем господствующие внутри модуля 1 напряжения, что предъявляет более низкие требования, например, к изоляции питающего напряжения 5 модуля 2 и к самому модулю 2. Дополнительно в модуле 1 может опционально вырабатываться второе выходное напряжение, например низкое напряжение постоянного тока для модуля 2, и подаваться к нему.
Как описано выше, преимущество модульного строения с внутренним коммуникационным интерфейсом 6 состоит в том, что модуль 2 (или при наличии нескольких модулей 2, по меньшей мере, отдельные из них) может быть отключен, тогда как модуль 1 доступен для внутреннего коммуникационного интерфейса 6 или, при необходимости, может также передавать через него сообщения. Таким образом, модуль 1 может выполнять обнаружение аварийного освещения (переключение с питания переменным током на питание постоянным током или на питание выпрямленным переменным током). Кроме того, блок управления G, например в виде микроконтроллера, модуля 1 может снабжаться в этом состоянии покоя мощностью только по внешней шине 10, если ее состояние покоя (например, по стандарту DALI) неравно 0 В. Следовательно, передаваемая по внешней шине 10 энергия может использоваться для питания управляющей схемы G (в частности, в виде пусковой энергии для управляющей схемы G или низковольтной питающей схемы). Таким образом, в этом состоянии покоя может быть отключено собственно питание напряжением модуля 1. Возможна также передача по этой внешней шине 10 только будящего сигнала, который вырабатывает пусковую энергию в виде мощности для кратковременного питания управляющей схемы G или низковольтной питающей схемы. В этом случае модуль 1 может быть полностью приведен в состояние покоя без энергопотребления. Будящим сигналом может быть также передача данных или кратковременное подключение напряжения.
Если несколько модулей 2 питаются за счет одного модуля 1 (центральный модуль), то, разумеется, могут отключаться селективно выбранные из этих нескольких модулей 2. Также это приводит к экономии электрических потерь. Например, в случае аварийного освещения может быть предусмотрено, что для достижения меньшей основной яркости для режима аварийного освещения эксплуатируется только один модуль 2 или одна подгруппа из нескольких, питаемых модулем 1 модулей 2.
С общим корпусом 12 соединено пассивное или преимущественно активное, в частности, управляемое блоком управления G охлаждающее средство 40, например вентилятор или блок охлаждения.
Дополнительно к коммуникационному интерфейсу 6 модуль 2 (модуль управления лампами) может содержать также дополнительный интерфейс (не показан). Последний может быть выполнен, например, проводным или беспроводным. Через него из модуля 2 могут считываться, например, данные, в частности для обслуживания, например для замены модуля 2. Также через этот дополнительный интерфейс может осуществляться актуализация данных или управляющего программного обеспечения, в частности при беспроводной связи. Также может быть возможным считывание через этот дополнительный интерфейс даже при отсутствии постоянного питающего напряжения 5 (передача мощности) для модуля 2, в частности, данных из него. Преимущественно дополнительный интерфейс расположен на модуле 2, будучи пространственно отделен от коммуникационного интерфейса 6.
Адаптивное управления тактируемого РС/РС-преобразователя (субмодуль В) в виде энергопередающего преобразователя
Как уже пояснялось выше, модуль 1 содержит субмодуль B, выполняющий функцию изолирующего преобразователя. Субмодуль B, исходя, например, из корректора коэффициента мощности субмодуля A, питается напряжением постоянного тока (шинным напряжением) VBus.
Как поясняется ниже более подробно, субмодуль B содержит тактируемый изолирующий DC/DC-преобразователь. Он поясняется со ссылкой на фиг.2.
На фиг.2 показано, что выходное напряжение субмодуля A (например, корректора коэффициента мощности), а именно шинное напряжение VBus, подается к инвертору 14, который может быть выполнен, например, в виде полумостового инвертора с двумя выключателями S1, S2. Управляющие сигналы для тактирования выключателей S1, S2 могут формироваться блоком управления G модуля 1.
К средней точке 29 инвертора 14 подключен резонансный контур 15, здесь в виде последовательного резонансного контура, а именно LLC-резонансного контура. В данном примере резонансный контур 15 содержит первую индуктивность 16, связующий конденсатор 17 и трансформатор 19. К резонансному контуру 15 подключен трансформатор 19 с первичной 20 и вторичной 21 обмотками. Индуктивность 16 может быть интегрирована в трансформатор 19, что более подробно поясняется ниже.
В отношении данного примера следует отметить, что трансформатор 19 изображен в виде эквивалентной схемы. При этом первичная обмотка 20 содержит в действительности индуктивность 18 в виде интегрированной индуктивности рассеяния и главную индуктивность Lm, которая проводит намагничивающий ток.
За трансформатором 19 следует выпрямитель 22, на выходе которого вырабатывается пониженное питающее напряжение 5 постоянного тока для модуля 2 управления лампами. Следовательно, модуль 2 обеспечивает необходимую гальваническую развязку (изоляцию в отношении подаваемого к модулю 1 входного напряжения 9). Выпрямитель 22 может быть выполнен известным образом из двух или четырех диодов, однако вместо этого может быть предусмотрен так называемый «синхронный выпрямитель», содержащий два полевых МОП-транзистора. Этот синхронный выпрямитель выполняет известным образом с помощью обоих полевых МОП-транзисторов полномостовое выпрямление. Следовательно, выпрямитель 22 может быть выполнен активным (с активно включенными элементами, например полевыми МОП-транзисторами) или пассивным (с пассивно включенными элементами, например диодами). Может происходить двух или же только однополупериодное выпрямление. За выпрямителем следует накопительный конденсатор 23. На выходе могут быть предусмотрены также дополнительные фильтрующие элементы, например одна или несколько индуктивностей и/или дополнительные конденсаторы для сглаживания и стабилизации выходного напряжения (питающего напряжения 5 постоянного тока).
В отношении резонансного контура 15, выполненного в данном примере в виде LLC-резонансного контура, следует заметить, что индуктивность 16 необязательно должна быть отдельной деталью. Напротив, эту функцию может выполнять рассеяние первичной обмотки 20 реального трансформатора. Если, тем самым, индуктивность 16 должна быть образована рассеянием первичной обмотки 20 трансформатора 19, то следует обратить внимание на то, чтобы между первичной 20 и вторичной 21 обмотками трансформатора 19 отсутствовала связь. Например, за счет соответствующего расстояния между первичной 20 и вторичной 21 обмотками трансформатора 19 можно целенаправленно достичь эффекта рассеяния, который функционально позволяет достичь индуктивности 16. Если этого рассеивающего действия недостаточно, то индуктивность 16 предусматривается в виде отдельной детали.
Комбинация инвертора 14 с резонансным контуром 15 и последующим выпрямителем 22 образует, следовательно, изолированный трансформатором 19 DC/DC-преобразователь в виде энергопередающего преобразователя. При этом DC/DC-преобразователь питается стабилизированным постоянным напряжением (шинным напряжением VBus), и на его основе на выходе DC/DC-преобразователя вырабатывается питающее напряжение 5 постоянного тока, которое представляет собой также стабилизированное постоянное напряжение, причем оно изолировано от шинного напряжения VBus трансформатором 19 и имеет преимущественно другой потенциал.
Этот принцип применяется в других резонансных схемах, например параллельных резонансных схемах или комбинациях из последовательных и параллельных резонансных схем.
Преимущество применения резонансной схемы в таком энергопередающем DC/DC-преобразователе заключается в использовании превышения резонанса, чтобы при номинальной или высокой нагрузке с вторичной стороны обеспечить с как можно малыми потерями коммутацию выключателей S1, S2 инвертора 14. Для этого работают обычно вблизи резонансной частоты резонансного контура или вблизи гармонической составляющей резонанса выходного контура.
Таким образом, выходное напряжение (на накопительном конденсаторе 23) передающего преобразователя является функцией частоты управления выключателями S1, S2 инвертора 14, выполненного здесь, например, в виде полумостового инвертора.
Если на выходе схемы на фиг.2 имеется небольшая нагрузка (т.е. модуль 2 и светодиодные модули F на фиг.1 представляют собой небольшую электрическую нагрузку), то управляющая частота выключателей S1, S2 инвертора 14 становится выше резонансной частоты. С изменением управляющей частоты изменяется также фазовый угол между напряжением и переменным током в средней точке 29 инвертора 14.
При очень высокой нагрузке (например, большой ток через светодиоды) и, тем самым, при работе вблизи резонанса фазовый угол между током и напряжением в средней точке 29 очень маленький. Как уже сказано, при небольшой нагрузке и, тем самым, при работе вдали от резонанса, т.е. когда, например, через светодиодную цепь 8 течет малая мощность, и, тем самым, на вторичной стороне трансформатора 19 не снимается или снимается малая мощность, фазовый угол очень большой (фиг.3с) и может составлять, например, до 50°. В этом состоянии через инвертор 14 продолжают течь токи, приводящие к электрическим потерям, а в светодиодную цепь 8 не течет сколько-нибудь заметная мощность.
Может быть предусмотрено комбинированное регулирование. Оно состоит в том, что для регулируемой величины «выходное напряжение энергопередающего преобразователя» используются две управляющие величины, а именно помимо тактирования, по меньшей мере, одного выключателя S1, S2 инвертора 14 изменение его шинного напряжения VBus. Изменение шинного напряжения VBus может достигаться, например, за счет соответствующего управления корректором коэффициента мощности субмодуля А.
Дополнительно или в качестве альтернативы можно согласовывать не только шинного напряжения VBus за счет соответствующего управления корректором коэффициента мощности субмодуля A. В зависимости от состояния нагрузки или рабочего состояния корректор коэффициента мощности субмодуля A может изменять режим работы либо самостоятельно, либо за счет соответствующего управления, в частности посредством блока управления G. В частности, корректор коэффициента мощности субмодуля A при работе с высокой нагрузкой может работать либо в так называемом пограничном режиме между прерывистым и непрерывным токовыми режимами, либо в непрерывном токовом режиме, а при работе с небольшой нагрузкой или в режиме ожидания - в прерывистом токовом режиме. Однако возможно также, чтобы корректор коэффициента мощности субмодуля A при работе с небольшой нагрузкой или в режиме ожидания (т.е. в режиме работы «импульс-пауза», называемом также «импульсный режим») переходил в так называемый «пакетный режим». При этом питающее напряжение (шинное напряжение VBus) продолжает поддерживаться постоянным, однако после определенного числа управляющих импульсов для выключателя или выключателей корректора коэффициента мощности делается более длительная пауза, прежде чем будет приложен следующий «пакет» (импульс) в качестве управляющего сигнала для выключателей корректора коэффициента мощности. При этом пауза между последовательностями импульсов существенно длиннее, т.е., например, по меньшей мере, вдвое больше суммы продолжительностей включения выключателей корректора коэффициента мощности.
Следовательно, имеет место комбинированная концепция регулирования, при которой в зависимости от восприятия нагрузки сигналом обратной связи, который непосредственно или косвенно отражает это восприятие нагрузки, комбинируются названные управляющие величины.
Другая возможность заключается в том, чтобы в управляющей величине «частота выключателей» при неизменной частоте увеличить время запаздывания между продолжительностями включения выключателей S1, S2 инвертора 14. Следовательно, повышение частоты создания мощности можно повысить до максимально допустимой управляющей частоты выключателей S1, S2 инвертора 14. При этой максимально допустимой частоте (соответствующей максимально допустимому фазовому углу) вторая управляющая величина используется для дальнейшего уменьшения потребления мощности, а именно увеличение времени запаздывания между продолжительностями включения выключателей S1, S2.
Другая возможность заключается в том, чтобы при неизменной частоте изменить отношение продолжительности включения выключателей S1, S2 инвертора 14 к продолжительности их выключения (т.е. отношение включения). Преимущественно отношение включения уменьшается с уменьшением нагрузки. Следовательно, уменьшение частоты создания мощности можно повысить до максимально допустимой управляющей частоты выключателей S1, S2 инвертора 14. При этой максимально допустимой частоте (соответствующей максимально допустимому фазовому углу) вторая управляющая величина используется для дальнейшего уменьшения потребления мощности, а именно изменение продолжительности включения выключателей S1, S2 (при неизменной частоте).
Другой возможностью ввода дополнительной управляющей величины является ввод так называемого пакетного режима (называемого режимом работы «импульс-пауза» или также импульсным режимом) (фиг.3а). При этом питающее напряжение (шинное напряжение VBus) поддерживается постоянным, однако, по меньшей мере, тогда, когда управляющая частота достигает максимально допустимого значения, а для уменьшения создания нагрузки частота больше не повышается. Напротив, после определенного числа управляющих импульсов для обоих выключателей S1, S2 (при этом число больше 1) делается более длительная пауза, прежде чем будет приложен следующий «пакет» (импульс) в качестве управляющего сигнала для выключателей S1, S2. При этом пауза между последовательностями импульсов существенно длиннее, т.е., например, по меньшей мере, вдвое больше суммы продолжительностей включения выключателей S1, S2.
В этом пакетном режиме, в котором управляющая величина является длительностью времени запаздывания между двумя продолжительностями импульсов, возникнет, разумеется, определенная «пульсация» напряжения на выходной стороне, т.е. на накопительном конденсаторе 23 (фиг.3d). Согласно изобретению, может быть предусмотрено, что на заданное значение задан допустимый диапазон пульсации напряжения на накопительном конденсаторе 23. Если напряжение после определенного числа импульсов последовательности импульсов (пакета) достигает верхнего предельного значения диапазона пульсации, то делается более длительная пауза между ними. Во время этой паузы в пакетном режиме работы напряжение на накопительном конденсаторе 23 тогда падает, пока не достигнет нижнего предельного значения диапазона пульсации. По достижении нижнего предельного значения прикладывается следующая последовательность импульсов, так что это возрастание и падение напряжения (пульсация) на накопительном конденсаторе 23 циклически повторяется. Следовательно, имеет место гистерезисное регулирование. Пакеты (т.е. промежуток времени, в течение которого происходит кратковременное тактирование) могут поддерживаться при этом относительно короткими. Таким образом, можно противодействовать помехам и слышимым шумам. В качестве альтернативы пакеты могут создаваться также с изменяемой частотой повторения и/или продолжительностью. Если субмодуль C выполнен в виде тактируемого источника постоянного тока, то возникающая в пакетном режиме работы пульсация питающего напряжения 5 постоянного тока может компенсироваться за счет соответствующего управления источником постоянного тока. Это может осуществляться, например, посредством регулирующего контура для отрегулирования тока светодиодов или работы тактируемого источника постоянного тока в зависимости от амплитуды питающего напряжения 5 постоянного тока.
Как уже сказано, адаптивная настройка режима работы (управляющая величина) DC/DC-преобразователя происходит в зависимости от нагрузки на вторичной стороне, т.е. нагрузки, питаемой напряжением на накопительном конденсаторе 23. Для этого отражающий нагрузку сигнал отводится обратно на управляющую схему (интегральная схема в блоке управления G на фиг.1), или используется подаваемый извне светорегулирующий сигнал. Потребление мощности нагрузкой может при этом измеряться на вторичной и первичной сторонах трансформатора 19. Например, в качестве отражающего потребление мощности нагрузкой сигнала можно использовать падение напряжения через измерительный резистор 24, включенный последовательно с выключателями S1, S2 инвертора 14 или, по меньшей мере, с одним из них. Собственно потребление мощности представляет собой тогда, в основном, произведение питающего напряжения (шинного напряжения VBus), измеренного или поддерживаемого постоянным, по меньшей мере, за счет корректора коэффициента мощности, на этот измеренный через падение напряжения на измерительном резисторе 24 ток через инвертор 14.
В данном примере описана регистрация на первичной стороне сигнала, отражающего потребление мощности нагрузкой. Разумеется, в качестве сигнала обратной связи можно использовать также сигналы обратной связи на вторичной стороне, например ток через светодиодную цепь 8 и/или напряжение над ней, каковой сигнал обратной связи отражает потребление мощности нагрузкой.
Предпочтительным процессом адаптивного комбинированного регулирования является при этом уменьшение нагрузки за счет непрерывного повышения управляющей частоты выключателей S1, S2 инвертора 14 до тех пор, пока не будет достигнута твердо заданная максимальная частота. Если эта максимальная частота достигнута, однако подводимая мощность для нагрузки должна продолжать уменьшаться, то тогда адаптивно управляющая схема одного из приведенных выше эксплуатационных режимов будет выбирать. Если, например, по достижении допустимой максимальной частоты шинное напряжение VBus понижается, то тогда допустимая максимальная частота управления выключателями S1, S2 может быть сохранена, или если это можно перекомпенсировать за счет понижения шинного напряжения VBus или другой выбранной управляющей величины, то управляющую частоту можно даже снова уменьшить до более низкого диапазона заданных значений.
Таким образом, следует переключение управляющей величины для подвода мощности для вторичной стороны по достижении максимальной частоты. В качестве примеров дополнительной управляющей величины, которая тогда используется дополнительно или в качестве альтернативы изменению управляющей частоты, уже называлось изменение (понижение) питающего напряжения (шинного напряжения VBus), изменение времени запаздывания между продолжительностями включения обоих выключателей S1, S2 или увеличение времени запаздывания между двумя последовательностями импульсов в пакетном режиме. При этом можно использовать также комбинацию дополнительных управляющих величин, например можно изменить как отношение включения, так и время запаздывания.
Следовательно, имеет место, в принципе, альтернативное управление тактируемым DC/DC-преобразователем в качестве субмодуля B, причем адаптивность относится к адаптации управляющих величин в зависимости от восприятия нагрузки вторичной стороной DC/DC-преобразователя. Субмодуль B может быть образован также инвертором с выключателем, например в виде преобразователя класса E или квазирезонансного обратноходового преобразователя, причем на выходе происходят соответственно выпрямление и сглаживание.
Как показано на фиг.1 и 2, к накопительному конденсатору 23 может быть подключен модуль 2 с дополнительной преобразовательной ступенью (дополнительный субмодуль C в качестве источника постоянного тока), причем модуль 2 (модуль управления лампами) может содержать блок управления E, например в виде интегральной схемы. Субмодуль C может быть выполнен в виде тактируемого источника постоянного тока (т.е., например, в виде понижающего преобразователя или в виде линейного регулятора, реализованного с транзисторами или интегральными схемами). Однако к выходу субмодуля B могут быть подключены также непосредственно светодиоды.
Как показано на фиг.1, внешние команды на регулирование яркости могут подаваться к блоку управления G модуля 1 и к блоку управления Е модуля 2. Во втором случае блок управления Е может передавать информацию о регулировании яркости на блок управления G, так что для потребления мощности не требуется измерительного сигнала, а, напротив, из одной блока управления G для DC/DC-преобразователя в модуле В можно использовать имеющуюся информацию о регулировании яркости.
Адаптивная настройка субмодуля В может осуществляться также на основе подаваемой извне команды на регулирование яркости или квитирования посредством модуля 2.
Управление выключателями S1, S2 инвертора 14 может осуществляться блоком G через задающий каскад. Преимущественно, по меньшей мере, задающий каскад выполнен для лежащих на высоком потенциале выключателей инвертора для управления на высоком потенциале напряжения. Например, этот задающий каскад представляет собой каскад сдвига уровня, задающий каскад с трансформатором или задающий каскад с воздушной катушкой. Этот задающий каскад может быть также интегрирован в блок управления G.
Блок управления G может также содержать средства для предотвращения ошибок при работе инвертора. Так, например, могут быть предусмотрены отключения сверхтока или ограничения тока через, по меньшей мере, один выключатель. Также может регулироваться время запаздывания для управления инвертором, т.е. промежуток времени между размыканием одного выключателя, например S1, и замыканием другого выключателя, например S2. Преимущественно это время запаздывания может регулироваться также адаптивно, например в зависимости от напряжения в средней точке инвертора 14 или от тока или напряжения над одним его выключателем.
Блок управления G может контролировать также шинное напряжение VBus, в частности также его пульсацию (т.е. колебания в течение определенного времени), в зависимости от оценки пульсации шинного напряжения VBus блок управления G может влиять на управление инвертором 14. В частности, он может согласовывать частоту инвертора 14 с оценкой пульсации шинного напряжения VBus, чтобы уменьшить ее на выходе инвертора 14. При этом преимущественно повышается частота последнего при возрастающем шинном напряжении VBus и уменьшается при его снижении. Таким образом, можно достичь того, чтобы эта пульсация на шинном напряжении VBus в меньшей степени передавалась на выход инвертора 14.
Обмен данными между модулем 1 и модулем 2 (модуль управления лампами)
Со ссылкой на фиг.4 следует пояснить коммуникационный интерфейс 6 (внутренняя шина) между модулем 1 и одним или несколькими модулями 2, 2' в качестве модулей управления лампами.
На основе того факта, что через внутреннюю шину несколько модулей 2, 2' находятся в связи не только с мощностью (тракт передачи 5), но и одно- или двунаправленно с обменом данными (коммуникационный интерфейс 6), модуль 1 может называться также центральным блоком или «ведущим». Модули 2, 2' могут называться также «подчиненными».
Как уже упоминалось выше, в отношении внутренней шины для коммуникационного интерфейса 6 имеет место преимущественно стандартная связь, предусмотренная дополнительно к питающему напряжению 5 постоянного тока. Под термином «стандартная» следует понимать то, что протокол коммуникационного интерфейса 6 не зависит от протокола внешней связи через интерфейс 11 данных модуля 1.
Преимущественно связь через коммуникационный интерфейс 6 является двунаправленной и может происходить, например, по протоколу SPI (Serial Peripheral Interface).
Также обмен данными через коммуникационный интерфейс 6 (внутреннюю шину) происходит преимущественно с разделением потенциалов, например с использованием оптокопплеров или трансформаторов. Например, при использовании одного или нескольких трансформаторов для коммуникационного интерфейса 6 с разделением потенциалов трансформатор может тактироваться высокочастотно, благодаря чему данные передаются пакетами высокочастотных тактов. За счет использования коммуникационного интерфейса 6 с разделением потенциалов пользователь и подключенные дополнительные модули могут быть защищены от возможных перенапряжений, например из-за повреждения одного из модулей. Также благодаря выполненному с разделением потенциалов коммуникационному интерфейсу 6 можно повысить прочность системы освещения, например за счет отделения и замены модуля 2.
Принципиальной функцией коммуникационного интерфейса 6 может быть передача от модуля 1 на модули 2 команд на регулирование яркости, принятые, например, через внешнюю шину 10. При этом из принятых через внешнюю шину 10 команд на регулирование яркости может быть выведена новая управляющая информация или новые команды для модулей 2.
Один случай применения двунаправленного обмена данными через внутреннюю шину (коммуникационный интерфейс 6) заключается в том, что данные, хранящиеся в одном из модулей 2, 2', могут передаваться через внутреннюю шину (коммуникационный интерфейс 6) к блоку управления G модуля 1. Это имеет то преимущество, что память данных в модулях 2, 2' лежит ближе к светодиодной цепи 8, в результате чего там происходит более сильный нагрев, который может привести к невосстановимой потере данных в памяти в зоне модулей управления лампами (модули 2, 2'). Также за счет передачи через коммуникационный интерфейс 6 к модулю 1 эти данные могут быть еще раз записаны в модуле 1 в виде копии.
Примерами этих передаваемых через коммуникационный интерфейс 6 данных являются эксплуатационные данные светодиодной цепи 8, например температуры, продолжительность эксплуатации, электрические параметры и т.д.
После передачи данных от одного из модулей управления лампами (модули 2, 2', …, 2n') к модулю 1 они, разумеется, могут быть, при необходимости, подвергнуты дальнейшей обработке, например считываться через внешнюю, подключенную к интерфейсу 11 данных шину 10. Следовательно, через внешнюю шину 10 может происходить дальнейший анализ эксплуатационных данных, например анализ отказа, компенсация старения в зависимости от переданной продолжительности эксплуатации светодиодной цепи 8 и т.д.
Стандартная концепция внутренней шины (коммуникационный интерфейс 6) имеет то преимущество, что модули управления лампами (модули 2, 2') могут быть заменены простым образом. Хранящиеся в заменяемом модуле управления лампами (модули 2, 2') данные, как уже описано выше, могут быть после передачи через коммуникационный интерфейс 6 сохранены в модуле 1. Если модуль управления лампами заменен, то хранящиеся в модуле 1 эксплуатационные данные могут быть переданы в новый модуль управления лампами, так что последний конфигурирован тогда идентично замененному.
Другими примерами таких эксплуатационных данных являются цветовые координаты, цветовое место и другие влияющие на спектр светодиодной цепи 8 параметры.
Через коммуникационный интерфейс 6 с модуля 2, Т на модуль 1 могут передаваться также изменения нагрузки или особые эксплуатационные состояния или сопоставимые события. Следовательно, может происходить предварительная сигнализация ожидаемых изменений нагрузки или эксплуатационного состояния, так что блок управления G в модуле 1 соответственно адаптивно согласует управление корректором коэффициента мощности в субмодуле A и/или управление субмодулем B. Например, в зависимости от передаваемого через коммуникационный интерфейс 6 с модуля 2, 2', ожидаемого изменения нагрузки или эксплуатационного состояния блок управления G может согласовывать параметры для изображенного на фиг.2 инвертора 14 и/или регулировочные характеристики для управления корректором коэффициента мощности в субмодуле A.
Разумеется, подобие предварительной информации может передаваться наоборот, т.е. от модуля 1 к модулю 2, 2'. Если, например, модуль 1 получает через внешнюю шину 10 и интерфейс 11 данных или интерфейсную схему D команды на регулирование яркости, означающие изменение нагрузки светодиодной цепи 8, то такая информация или отражающий изменение эксплуатационного состояния сигнал может передаваться через шину или коммуникационный интерфейс 6 на модули 2, 2', так что предусмотренный в них блок управления Е может согласовывать управляющие параметры, например для источника постоянного тока (субмодуль С) в соответствии с ожидаемым изменением нагрузки.
Изображенная на фиг.4 система «ведущий-подчиненный» имеет также преимущества в отношении уменьшения электрических потерь, поскольку может быть предусмотрено подобие режима ожидания, в котором один, несколько или все подключенные к модулю 1 модули 2, 2' отключаются, тогда как, по меньшей мере, блок управления G модуля 1 может продолжать контролировать внешнюю подключенную шину 10 через интерфейс 11 данных или интерфейсную схему D.
Изображенная на фиг.4 система «ведущий-подчиненный» выполнена с возможностью срабатывания преимущественно только через шину 10, подключенную к интерфейсу 11 данных или интерфейсной схеме D модуля 1. Однако может существовать внутреннее иерархическое разделение, при необходимости, включая адресацию через внутреннюю шину (коммуникационный интерфейс 6) к нескольким подключаемым модулям 2, 2'.
Таким образом, с одной стороны, может происходить адресная связь с модулями 2, 2'. Однако в качестве альтернативы или дополнительно может быть предусмотрен также режим рассылки, т.е. неадресная передача данных от модуля 1 ко всем подключенным модулям 2, 2'. В этом режиме рассылки посланная от модуля 1 через внутреннюю шину (коммуникационный интерфейс 6) команда принимается и обрабатывается всеми модулями 2, 2'.
В случае аварийного освещения может быть предусмотрено, что после обнаружения модулем 1 аварийного освещения через коммуникационный интерфейс 6 передается соответствующая управляющая команда и модули 2, 2' соответственно согласуют свою работу. Например, для достижения меньшей основной яркости и, тем самым, меньшего энергопотребления для режима аварийного освещения может работать только один модуль 2 или одна подгруппа из нескольких питаемых модулем 1 модулей 2.
Коммуникационный интерфейс 6 может использоваться также для передачи низковольтного питания (в этом случае происходят обмен данными и передача энергии, например через питание низким напряжением Vccs постоянного тока на вторичной стороне). Например, можно использовать так называемую низкоактивную передачу данных, причем в состоянии покоя приложен уровень в несколько воль, например 12 В. В случае связи, например через трансформаторы, энергия могла бы, тем не менее, передаваться даже при гальванической развязке коммуникационного интерфейса 6.
Низковольтное питание
Со ссылкой на фиг.5 следует пояснить низковольтное питание в модульной системе на фиг.1.
Ниже поясняется, как посредством такого низковольтного питания, например также за счет модуля 2 (модуль управления лампами), можно питать также активные охлаждающие средства 40, например вентилятор, насос, элемент Пельтье и т.д. Такое активное охлаждающее средство 40 снабжается электрической мощностью, следовательно, не непосредственно модулем 1, а преимущественно индивидуально через каждый подключенный модуль 2.
На фиг.5 далее показано, как шинное напряжение VBus вырабатывается, например, корректором коэффициента мощности модуля 1 и подается к инвертору. В этом примере инвертор содержит только один выключатель S1 в противоположность инвертору 14 в виде полумостового инвертора на фиг.2. За инвертором с выключателем S1 следует первичная обмотка 20 трансформатора 19. Его вторичная обмотка 21 питает выпрямитель 22, выходное напряжение которого непосредственно или косвенно подается к светодиодной цепи 8. Таким образом, первичная 20 и вторичная 21 обмотки представляют собой уже поясненный выше тракт для питания электрической мощностью (питающее напряжение 5 постоянного тока) светодиодной цепи светодиодного модуля F,
Инвертор на фиг.5 может представлять собой преобразователь с одним или несколькими выключателями, например полумостовой инвертор (фиг.2) или изолированный разделительный преобразователь (обратноходовый преобразователь). Преимущественно он имеет резонансный или квазирезонансный принцип действия.
Дополнительно к этому тракту передачи, согласно изобретению, имеется дополнительный низковольтный тракт передачи. Он содержит дополнительную вторичную обмотку 30, которая также магнитно связана с первичной обмоткой 20. Через выпрямительную схему с диодом 31 и конденсатором 32 за счет соответствующего выбора отношения числа витков обмоток 20, 30 вырабатывается низкое питающее напряжение Vccs постоянного тока на вторичной стороне, которое также подается к модулю 2. Последний может использовать это низкое питающее напряжение по-разному:
- для питания интегрированного блока управления Е в модуле управления лампами (модуль 2);
- для выборочного управления активными охлаждающими средствами и/или для активного питания других подключенных исполнительных органов или датчиков, схематично обозначенных поз.41.
Как видно на фиг.5, с первичной обмоткой 20 трансформатора 19 магнитно связана еще одна (и, тем самым, третья) вторичная обмотка 33. Она питает выпрямитель с диодом 42 и конденсатором 43 и служит для вырабатывания низкого питающего напряжения Vccp на первичной стороне. При этом под термином «первичная сторона» следует понимать, что это низкое питающее напряжение Vccp используется в модуле 1 (следовательно, на сетевой стороне, т.е. перед разделением потенциалов), например в качестве низкого питающего напряжения для внутреннего интегрированного блока управления G модуля 1.
В то время как передача мощности через тракт питающего напряжения 5 постоянного тока для питания светодиодного модуля F может составлять, например, 48 В, уровень напряжений Vccs и Vccp заметно ниже и лежит в диапазоне 2-12 В.
Следовательно, от модуля 1 к каждому подключенному модулю 2 могут подаваться два разных питающих напряжения постоянного тока.
Система освещения может эксплуатироваться также таким образом, что субмодуль В дезактивирует питание напряжением 5 и поддерживает только низковольтное питание, например напряжение Vccs). Это может происходить, например, в ошибочном режиме или режиме покоя. Таким образом, могут продолжать оцениваться, например, имеющиеся датчики, такие как датчик 41, и может оставаться активированным, например, также коммуникационный интерфейс 6. Преимущественно для этого блок управления Е продолжает эксплуатироваться, по меньшей мере, в уменьшенном режиме работы, например с уменьшенной функциональностью).
Датчиком 41, функционально приданным модулю 2, может быть датчик яркости, например фотодиод с опциональной обрабатывающей логикой, или датчик цвета.
Датчиком 41 может быть, разумеется, также температурный датчик, выходной сигнал которого может использоваться, например, для определения температуры соединения светодиодов светодиодного модуля F. С другой стороны, этот датчик 41 в качестве температурного датчика может использоваться также для регулирования работы активного охлаждения, например охлаждающего средства 40 (преимущественно в виде вентилятора).
В качестве альтернативы или дополнительно определение температуры соединения светодиодов может осуществляться за счет оценки характеристики и измерения электрических параметров светодиодной цепи светодиодного модуля F.
За счет того, что питание низким питающим напряжением Vccp на первичной стороне происходит через обмотку 33, независимую для вырабатывания низкого питающего напряжения Vccs на первичной стороне, имеет место, тем самым, разделение потенциалов.
Как показывает обзор фиг.2 и 5, инвертор может быть выполнен с одним выключателем S1 или несколькими выключателями S1, S2. В качестве других примеров, помимо изображенного на фиг.2 инвертора 14 в виде полумостового инвертора, следует привести обратноходовый преобразователь, преобразователь SEPIC или повышающий преобразователь. Следовательно, в любом случае имеет место изолированный преобразователь.
Для фазы пуска блока управления G модуля 1 можно известным сам по себе образом питать входным напряжением 9 пусковой резистор R1, который снабжает блок управления G энергией, пока не будет выработано низкое питающее напряжение Vccp на первичной стороне, поскольку вырабатывание напряжений Vccs и Vccp предполагает тактирование субмодуля В (DC/DC-преобразователь). Если собственно питание низким напряжением тогда запущено, исходя из изолированного преобразователя (субмодуль В), то омический пусковой резистор R1 может быть снова отключен выключателем S3, чтобы, тем самым, избежать электрических потерь через пусковой резистор R1 в правильном режиме работы схемы.
Преимущественно напряжения Vccs и Vccp вырабатываются посредством двухполупериодного выпрямителя. Однако для выпрямления может использоваться также только один диод.
Напряжение Vccs может подаваться в модуле 2 блоку управления Е и/или использоваться для питания приданного модулю 2 активного охлаждающего средства 40.
Вторичное низкое питающее напряжение Vccs постоянного тока для модуля 2 может подаваться для стабилизации напряжения, как показано на фиг.5, к блоку управления 50 охлаждающим средством, например DC/DC-преобразователю или же линейному регулятору, причем тогда стабилизированное выходное напряжение этого DC/DC-преобразователя или линейного регулятора 50 питает блок управления Е модуля 2.
В зависимости от подаваемой через коммуникационный интерфейс 6 команды на регулирование яркости (информация о регулировании яркости), от заданного блоком управления Е значения или же в зависимости от температуры светодиодного модуля F, полученной непосредственно (через температурный датчик) или косвенно (например, определение температуры соединения светодиодов), блок управления 50 может управлять или регулировать активное охлаждающее средство 40.
Таким образом, преимущественно активные охлаждающие средства 40 могут питаться за счет такого низковольтного питания через блок управления 50, расположенный соответственно на модуле 2. В этом случае такие активные охлаждающие средства 40 снабжаются электрической мощностью, следовательно, не непосредственно, исходя из модуля 1, а преимущественно индивидуально через каждый подключенный модуль 2 управления лампами. Это дает то преимущество, что при работе нескольких модулей 2, 2', … через модуль 1 для каждого из них возможно независимое управление активными охлаждающими средствами 40. Это может быть, в частности, предпочтительным, если яркость отдельных светодиодных модулей F разная или вследствие пространственного расположения отдельных светодиодных модулей F происходит их разный по силе нагрев.
Как уже сказано, низковольтное питание может служить также коммуникационным интерфейсом 6, т.е. дополнительно к передаваемой энергии могут передаваться также данные.
Связь с коррекцией памяти между модулем управления лампами и светодиодным модулем
Как показано на фиг.1, светодиодный модуль F может быть снабжен памятью 4, например, EPROM, флэш-памятью или ОТР (однократно программируемая память).
Как схематично обозначено на фиг.1 поз.3, блок управления Е, например интегральная схема или микроконтроллер модуля 2, может прибегать к памяти 4 светодиодного модуля F, чтобы, тем самым, выборочно считывать ее содержимое. Считываемые из этой памяти 4 данные могут затем передаваться также от блока управления E модуля 2 через коммуникационный интерфейс 6 (внутренняя шина) на модуль 1. Данными в памяти 4 могут быть, например, время прохождения, производственные данные, логинг ошибок, максимальное значение, минимальные значения (например, тока и напряжения) и/или температура.
Это имеет то преимущество, что уменьшается возможное, нарушение содержимого памяти 4 светодиодного модуля F, например за счет воздействия температуры из-за большой физической близости к светодиодной цепи 8. Таким образом, блок управления E модуля 2 может считывать эти данные и сохранять их в приданной ему памяти в виде копии. Кроме того, блок управления E может периодически или в зависимости от эксплуатационного состояния или события регенерировать память 4 светодиодного модуля F.
Также возможно, чтобы сам светодиодный модуль F не содержал никакой памяти. Соответствующие данные, например допустимый прямой ток для его светодиодов, могут быть в этом случае записаны в приданную блоку управления E память 51. Это может осуществляться, например, при изготовлении модуля 2.
Еще одна альтернатива или дополнительная опция заключается в том, что светодиодный модуль F снабжен идентификационным признаком, который представляет, например, эксплуатационные данные или является, по меньшей мере, идентификацией светодиодного модуля F. Идентификационный признак считывается тогда блоком управления E и записывается, например, в приданную блоку управления Е память. Это считанное, тем самым, только один раз содержимое идентификационного признака может использоваться затем для дальнейшей работы светодиодного модуля F.
Как уже сказано, в случае идентификационного признака речь может идти также только о чистой идентификации. Модуль управления лампами (модуль 2) определял бы в этом случае идентификационные данные, а затем определял бы соответствующие эксплуатационные данные от независимой от светодиодного модуля F памяти, например также имеющее возможность доступа через внешнюю шину 10 содержимое базы данных. Этот подход имеет, разумеется, то преимущество, что, тем самым, можно сократить расходы на дополнительную память 4 светодиодного модуля F, например EPROM.
Возможность считывания содержимого памяти 4 посредством блока управления E дает то преимущество, что совершенно разные светодиодные модули F могут комбинироваться с модулем управления лампами (модуль 2), причем требуемые эксплуатационные данные могут считываться из светодиодного модуля F, а модуль управления лампами (модуль 2) может, тем самым, гибко приспосабливаться к подключенному светодиодному модулю F.
Калибровка световой мощности
Как схематично показано на фиг.6а, 6b, светодиодный модуль F имеет преимущественно два, три или более управляемых независимо друг от друга каналов 53, 53', 53”. Каждый из них может содержать светодиодную цепь 8, 8', 8” с одним или несколькими светодиодами. Преимущественно светодиоды светодиодной цепи 8, 8', 8” почти идентичны в отношении своего спектра.
Цель заключается в том, чтобы разные светодиодные каналы 53, 53', 53” светодиодного модуля F образовывали в световом пространстве пространство, в пределах которого лежат нужные управляемые цветовые координаты.
При этом два или более светодиодных каналов 53, 53', 53” выполнены предпочтительно так, что образованное пространство охватывает, по меньшей мере, большие участки кривой белого света Планка.
Примерным выполнением может быть, следовательно, такое:
- первый канал с одним или несколькими монохроматическими синими светодиодами;
- второй канал с одним или несколькими монохроматическими красными светодиодами;
- третий канал с одним или несколькими светодиодами конвертированного цвета, преимущественно в зеленовато-белом спектре.
Следовательно, при наличии трех разных светодиодных каналов в цветовой координатной системе (CIE) образуется треугольник. За счет разного индивидуального управления интенсивностями разных светодиодных каналов можно управлять каждым цветовым местом в пределах этого треугольника.
В данном примере в цветовом пространстве образован треугольник, покрывающий, по меньшей мере, большие участки кривой белого света Планка. Таким образом, за счет индивидуального управления тремя названными светодиодными каналами можно управлять, в основном, каждой точкой этой кривой, т.е. может излучаться белый свет разной цветовой температуры. Как результат смешивания света нескольких светодиодных каналов.
Как уже сказано, чтобы управлять разными цветовыми местами, в частности на кривой белого света Планка, следует управлять разными светодиодными каналами с разной интенсивностью (потоком).
В случае известной полученной или заранее известной эффективности светодиодов светодиодных каналов это возможно расчетным путем, т.е. исходя из координаты X/Y нужного цветового места, можно непосредственно вычислить управляемую интенсивность отдельных каналов.
Проблема заключается в том, что разные светодиоды имеют разный к.п.д. (люмен). В частности, кривая светоотдачи (яркость для заданной длины волны) или ее подъем неодинаковы для всех светодиодов. Если управлять разными цветовыми местами в пределах треугольника в цветовой координатной системе, в частности для Abfahren кривой белого света Планка, то нужный спектр, правда, достигается, однако изменится общая светоотдача. При этом она как тенденция будет уменьшаться, чем выше доля интенсивности менее эффективных светодиодов.
Согласно одному аспекту изобретения, при Abfahren разных цветовых мест, в частности на упомянутой кривой, общая светоотдача должна оставаться постоянной.
Для этого предварительно расчетным или экспериментальным путем определяется, в какой точке в пределах abzufahrenden цветовых мест в пределах цветового треугольника светоотдача минимальная. Зная минимальную светоотдачу, можно тогда калибровать управляющие интенсивности для всех других anzufahrenden цветовых мест, т.е. интенсивности для каждого отличающегося от минимальной светоотдачи цветового места «искусственно» калибруются вниз, так что, в конце концов, в образованном цветовом пространстве везде постоянно вырабатывается свет с минимально достигаемой светоотдачей.
Эта калибровка до минимально достигаемой светоотдачи осуществляется, следовательно, посредством калибровочного коэффициента, применяемого в равной мере к интенсивностям всех светодиодных каналов.
При этом калибровочный коэффициент может быть вычислен на основе известных к.п.д. используемых светодиодов.
В случае, если к.п.д. разных светодиодов светодиодных цепей 8, 8', 8” неизвестны, можно, например, посредством фотодатчика измерить общую светоотдачу при Abfahren разных цветовых мест, в частности по типу сканирования кривой белого света Планка при одновременном измерении общей светоотдачи. Такое измерение обеспечивает, следовательно, минимальную общую светоотдачу в пределах abzufahrenden цветовых мест и зависимость общей светоотдачи от цветового места.
Например, калибровочный коэффициент может использоваться для уменьшения интенсивностей отдельных светодиодных цепей в виде ШИМ-светорегулирования (за счет изменения ширины импульсов управления). Таким образом, калибровка осуществляется преимущественно за счет уменьшения скважности ШИМ-управления. Однако это может осуществляться также за счет согласования амплитуды (в виде амплитудного светорегулирования). Именно когда светорегулирование или настройка интенсивности происходит посредством ШИМ, калибровка может осуществляться за счет согласования амплитуды.
Названное сканирование интенсивности может выполняться повторно, поскольку разные светодиоды в отношении своего к.п.д. (интенсивность на поток) имеют разные явления старения, которые должны компенсироваться и могут привести к разным к.п.д. В частности, светодиод конвертированного цвета будет иметь более высокую степень старения, чем монохроматические светодиоды.
Однако названное сканирование интенсивности может использоваться также для контроля старения, эксплуатационные данные светодиода известны (например, хранятся в памяти 4 светодиодного модуля F).
Такие параметры старения могут также определяться еще изготовителем и храниться, например, в приданной светодиодному модулю F памяти 4.
Перечень ссылочных позиций
1 - первый модуль
2, 2' - второй модуль
3 - доступ блока управления Е к памяти 4
4 - память
5 - питающее напряжение постоянного тока
6 - коммуникационный интерфейс
7 - выход
8, 8', 8” - светодиодная цепь
9 - входное напряжение
10 - внешняя шина
11 - интерфейс данных
12 - корпус
13 - величина обратной связи светодиодной цепи 8
14 - инвертор
15 - резонансный контур
16 - индуктивность
17 - связующий конденсатор
18 - индуктивность
19 - трансформатор
20 - первичная обмотка
21 - вторичная обмотка
22 - выпрямитель
23 - накопительный конденсатор
24 - измерительный резистор
29 - средняя точка
30 - вторичная обмотка
31 - диод
32 - конденсатор
33 - вторичная обмотка
40 - охлаждающее средство
41 - исполнительные органы или датчики
42 - диод
43 - конденсатор
50 - блок управления охлаждающим средством
51 - память
52 - память, связанная с блоком управления G
53, 53', 53” - светодиодный канал
А - первый субмодуль
B - второй субмодуль
С - дополнительный субмодуль
D - интерфейсная схема
Е - блок управления
F - светодиодный модуль
G - блок управления
Lm - главная индуктивность
R1 - пусковой резистор
S1 -выключатель
S2 - выключатель
S3 - выключатель
VBus - шинное напряжение
Vccp - низкое питающее напряжение на первичной стороне
Vccs - низкое питающее напряжение постоянного тока на вторичной стороне
Изобретение относится к модульной светодиодной системе освещения, содержащей первый модуль (1), на который подается входное напряжение (9), предпочтительно питающее напряжение переменного тока, и который содержит второй субмодуль (В), предпочтительно изолирующий блок, на выходе которого вырабатывается гальванически развязанное от питающего напряжения напряжение постоянного тока, и блок управления (G), а также содержащей второй модуль (2), предпочтительно модуль управления лампами, содержащий питаемый выходным напряжением постоянного тока первого модуля (1) дополнительный субмодуль (С), предпочтительно тактируемый источник постоянного тока, управляемый блоком управления (Е) второго модуля (2), и светодиодный модуль (F), содержащий по меньшей мере одну светодиодную цепь (8) и питаемый субмодулем (С). Техническим результатом является обеспечение комбинированного регулирования работы светодиодной цепи. 9 з.п. ф-лы, 7 ил.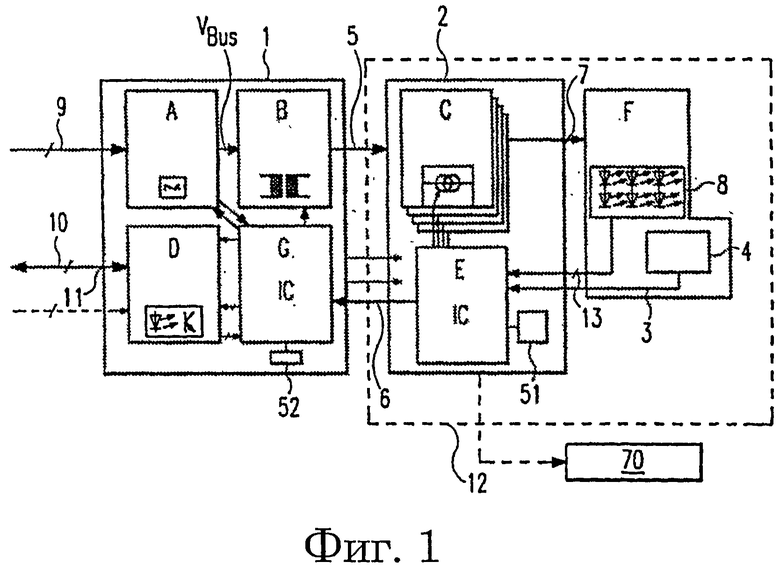
1. Модульная светодиодная система освещения, содержащая
первый модуль (1), выполненный с возможностью подачи к нему входного напряжения (9), предпочтительно питающего напряжения переменного тока, и содержащий:
второй субмодуль (В), предпочтительно изолирующий блок, выполненный с возможностью вырабатывать на своем выходе гальванически развязанное от питающего напряжения напряжение постоянного тока, и
блок управления (G);
второй модуль (2), предпочтительно модуль управления лампами, содержащий питаемый выходным напряжением постоянного тока первого модуля (1) дополнительный субмодуль (C), являющийся тактируемым источником постоянного тока, управляемым блоком управления (E) второго модуля (2);
и светодиодный модуль (F), содержащий по меньшей мере одну светодиодную цепь (8) и питаемый дополнительным субмодулем (C).
2. Система по п. 1, в которой блок управления (G) первого модуля (1) и блок управления (E) второго модуля (2) выполнены с возможностью обмена данными через коммуникационный интерфейс (6).
3. Система по п. 2, в которой внутренний обмен данными между первым модулем (1) и вторым модулем (2) стандартизирован, т.е. не зависит от внешней шинной связи первого модуля (1).
4. Система по п. 1, в которой первый модуль (1) выполнен с возможностью выработки помимо питающего напряжения (5) постоянного тока для дополнительного субмодуля (C) также низкого питающего напряжения (Vccs) постоянного тока для второго модуля (2).
5. Система по п. 1, в которой второй модуль (2) и светодиодный модуль (F) размещены в общем корпусе (12).
6. Система по п. 5, в которой с общим корпусом (12) соединено активное и/или пассивное охлаждающее средство (40).
7. Система по п. 1, в которой блок управления (G) первого модуля (1), предпочтительно с развязкой по напряжению, выполнен с возможностью срабатывания посредством интерфейсной схемы (D) через внешнюю шину (10).
8. Система по п. 1, в которой второй модуль (2) является изолированным энергопередающим DC/DC-преобразователем.
9. Система по п. 1, в которой несколько вторых модулей (2) выполнены с возможностью питания напряжением постоянного тока от первого модуля (1).
10. Система по п. 1, в которой первый модуль (1) выполнен с возможностью питания одного или более подключенных вторых модулей (2) параллельно по меньшей мере двумя напряжениями постоянного тока разного уровня.
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| DE 202008012421 U1, 18.03.2010 | |||
| Затяжной замок для соединения рештаков сотрясательного конвейера | 1934 |
|
SU43334A1 |
| Устройство для определения удельного сопротивления жидких тел | 1948 |
|
SU78899A1 |
| DE 102004002018 A1, 04.08.2005 | |||

