Изобретение относится к области неразрушающего контроля и может быть использовано для измерения расстояний, в частности в качестве датчика в дефектоскопах, профилемерах, нефтяной и газовой промышленности, для измерения геометрии трубопровода и положения дефектоскопа в трубопроводе.
Известен двухканальный индукционный измеритель расстояний и линейных перемещений (2-канальный пневмограф) (Автор: Миняев В.И. http://imlab.narod.ru), который предназначен для измерения и контроля перемещений различных объектов или изменений их размеров. Он также позволяет сравнивать между собой изменения двух расстояний или находить их отношение. Прибор может комплектоваться различными индуктивными датчиками в зависимости от конфигурации исследуемого объекта. Диапазон измеряемых перемещений 0-100 мм в любую сторону. Средняя чувствительность прибора (на внешнем выходе) 200 мВ/мм. Прибор состоит из двух идентичных приемо-передающих каналов. Рассмотрим работу одного из них (первого). С помощью генератора синусоидальных колебаний Г1 вырабатывается переменное напряжение частотой 5000 Гц. С целью устранения взаимного влияния каналов частоты генераторов Г1 и Г2 должны отличаться примерно в 1.5-2 раза. Форма колебаний выбрана синусоидальной, чтобы не создавались взаимные помехи за счет высших гармоник. Усилитель мощности УМ1 служит для создания в катушке возбуждения КВ1 переменного тока, достаточного для надежной работы прибора. Обычно этот ток выбирается максимально возможным для данной катушки возбуждения, лишь бы катушка не перегревалась. За счет взаимной индукции в катушке датчика (приемной катушке) Д1 наводится ЭДС. Напряжение с катушки подается на резонансный усилитель УР1, настроенный на частоту генератора Г1. С выхода усилителя переменное напряжение подается на детектор Д1. Через устройство сдвига нуля УС1 выпрямленное напряжение, зависящее от расстояния между катушками, подается на выходной разъем прибора ("Выход 1"). Далее оно поступает на осциллограф, самописец, вольтметр или другой регистрирующий прибор. Устройство сдвига нуля служит для установки нулевого напряжения на выходе прибора при переведении возбуждающей катушки и катушки датчика в исходное положение. Генераторы, усилители мощности и катушки возбуждения составляют передающую часть прибора, остальные узлы - приемную часть. Блок питания БП вырабатывает все необходимые для работы прибора напряжения.
В качестве недостатка можно отметить большое энергопотребление (40 Вт), измерительная катушка закрепляется на перемещаемом объекте и низкое быстродействие время изменения сигнала от минимального до максимального примерно 2 мсек.
Известен преобразователь линейных перемещений (RU 2131591, МПК G01H 11/02, G01B 7/00), в LC-генератор введен следящий токозадающий узел, в узел буферного усилителя выходного нормализующего усилителя введен согласующий каскад, включающий p-n-p транзистор и два резистора, а конфигурация каркаса катушки индуктивности в конструкции индукционного датчика выбрана таким образом, чтобы обеспечивала однорядную намотку катушки индуктивности, при этом второй выход генератора соединен в следящем токозадающем узле с первым выводом второго резистора, второй вывод которого соединен с первым выводом проволочного потенциометра, шунтированного первым резистором, подвижный контакт потенциометра соединен с первым выводом четвертого резистора и коллектором первого n-p-n транзистора, соединенного своим эмиттером с коллектором и базой второго n-p-n транзистора, база первого n-p-n транзистора соединена со вторым выводом четвертого резистора и первым выводом первого терморезистора, второй вывод которого связан с первым выводом второго терморезистора и через пятый резистор заземлен, второй вывод проволочного потенциометра соединен с первым выводом третьего резистора, эмиттер второго n-p-n транзистора соединен с первым выводом третьего резистора, вторым выводом второго терморезистора, является выходом следящего токозадающего узла и подключен к второму входу LC-генератора, второй выход выходного нормализующего усилителя соединен в узле буферного усилителя с неинвертирующим входом операционного усилителя, а третий выход - с инвертирующим входом операционного усилителя и первым выводом первого резистора, второй вывод которого соединен с эмиттером p-n-р транзистора и через третий резистор заземлен, выход операционного усилителя через второй резистор связан с базой упомянутого транзистора, коллектор которого через четвертый резистор подключен к источнику напряжения питания, эмиттер p-n-р транзистора является выходом узла буферного усилителя и подключен ко второму входу выходного нормализующего усилителя.
Введенная совокупность признаков существенна, т.к. позволила существенно расширить диапазон преобразующих перемещений (с d=0,5-2,1 мм до d=0-5 мм), с одной стороны, и снизить погрешность преобразования (с ±5% до ±2%), а мощность равна 18·30=540 мВт.
В этом устройстве диапазон перемещений от 0-5 мм, что недостаточно для изменения расстояний между трубой газопровода и снарядом с измерителем расстояний для больших участков с временем работы 10-30 часов.
Наиболее близким аналогом, принятым за прототип, является устройство для измерения расстояния RU 2023978, G01B 7/4, опубл. 30.11.1994, которое содержит источник 1 питания переменного тока, первичный преобразователь с двумя катушками индуктивности 2 и 3, три детектора 6, 7 и 8, блок 9 вычитания напряжений, блок 20 деления, хотя бы один корректирующий канал 11. Такой канал содержит две дополнительные катушки индуктивности 13 и 14, два дополнительных детектора 17 и 18, дополнительный блок 19 вычитания и 20 выделения модуля. Напряжение на выходе блока вычитания корректирующего канала несет информацию о степени близости первичного преобразователя к краю поверхности контролируемого объекта. Наиболее целесообразно применение предлагаемого устройства для измерения в диапазоне от долей миллиметра до 40-100 мм в транспорте на магнитном подвесе, воздушной подушке, а также вибраций, толщины неметаллических покрытий и т.п.
В качестве недостатка можно отметить наличие катушек, которые попарно имеют идентичные параметры и расположены с высокой точностью относительно третьей, взаимное влияние датчиков друг на друга при близком расположении, низкое быстродействие датчиков, обработка постоянного напряжения после детектирования приводит к значительным погрешностям, особенно при выполнении деления сигналов при измерении больших расстояний, большие температурные дрейфы.
Задача предлагаемого решения: увеличение быстродействия, уменьшение взаимного влияния датчиков друг на друга при применении в многоканальных измерительных системах.
Это достигается тем, что измеритель расстояния между датчиком и объектом из электропроводящего материала, содержащий индуктивный преобразователь зазора с двумя катушками индуктивности, одна из которых соединена с генератором, а вторая является катушкой приемника, катушки генератора и приемника выполнены с взаимно перпендикулярным расположением осей, причем катушка генератора расположена в середине катушки приемника и ее ось параллельна поверхности объекта, до которого измеряется расстояние, при этом на генераторную катушку подается трапецеидальный сигнал от генератора, параллельно приемной катушке подсоединены конденсатор и резистор, усилитель, сигнал с которого подается на логарифмический усилитель с детектором и далее на блок линеаризации.
Измеритель расстояния между датчиком и объектом из электропроводящего материала по п. 1, блок линеаризации выполнен в виде контроллера с алгоритмом аппроксимации нелинейной зависимости в виде полинома с коэффициентами, которые получены после калибровки в лабораторных условиях.
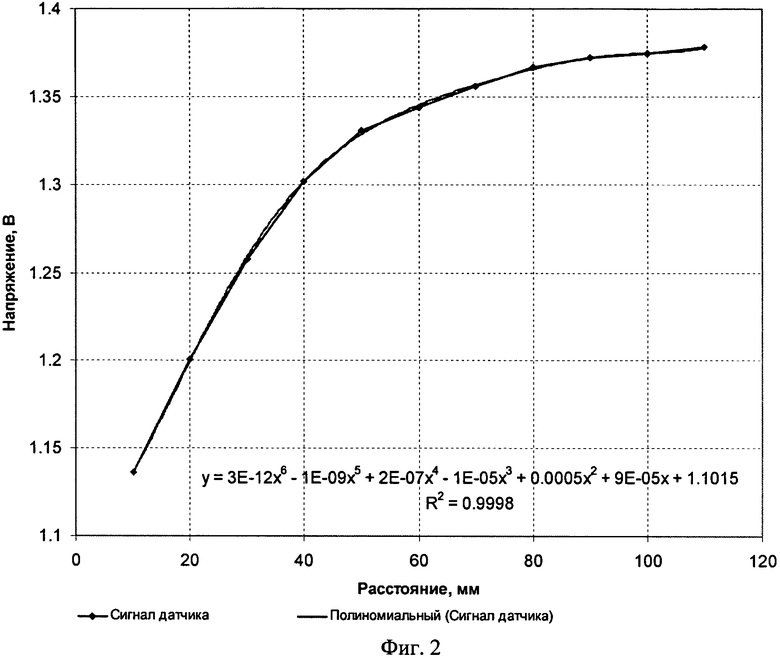
На фиг. 1 представлена условная схема измерителя расстояния до объектов из электропроводящего материала, а на фиг. 2 - градуировочная характеристика датчика.
Измеритель расстояния до объекта 1 состоит из экрана 2; генератора 3; усилителя 4; источника питания с гальванической развязкой 5, логарифмического усилителя 6; детектора 7; АЦП 8; блока линеаризации (контроллера) 9; источника питания 10, катушки генератора L1; катушка приемника L2, резистора R, конденсатора С.
Катушка генератора L1 расположена внутри в середине катушки (на фиг. 1 условно не показано конструктивное решение катушек генератора L1, катушки приемника L2 и экрана) приемника L2, параллельно которой подсоединен конденсатор и резистор, при отсутствии объекта настроен резонанс на частоту генератора: стенка вдоль объекта измерения выполнена из диэлектрика, остальные стенки выполнены из электропроводящего парамагнетика. Ось катушки L1 расположена параллельно поверхности измеряемого объекта и перпендикулярно оси катушки L2.
Устройство работает следующим образом. RC-генератор 3 на микросхеме AD8615AUJZ формирует сигнал трапецеидальной формы частотой 2 МГц и амплитудой 3,3 В, который подается на многослойную катушку L1 размерами: диаметр 11 мм, высота 8 мм, ось которой параллельна объекту, до которого измеряется расстояние, причем катушка находится в середине приемной катушки L2 в экране 2 из проводящего парамагнетика, а сторона, обращенная в сторону измерения расстояния, открыта, ось которой перпендикулярна объекту 1, до которого производится измерение расстояние, намотка катушки рядовая, 35 витков, диаметр намотки 44 мм, ширина 7 мм, провод ПЭВ-2 диаметром 0,18 мм, параллельно катушке подключен конденсатор С и настроен резонанс 2МГц, далее сигнал усилителем 4 на микросхеме AD8615AUJZ в 10 раз, и с целью уменьшения динамического диапазона поступающего сигнала, и подается на логарифмический усилитель 6 с детектором 7 на микросхеме AD8307ARZ, после чего сигнал поступает на блок линеаризации 9 в виде контроллера ADUC834, который производит выдачу сигнала по шине SPI, внешним устройствам. Генератор питается от источника питания с гальванической развязкой 5 RM-0505S, один из выводов источника питания 5 и соединен с экраном 2 усилитель 4, логарифмический усилитель 6, АЦП 8, блок линеаризации 9, которые соединены с источником питания 10 в виде импульсного стабилизатора LM2397IPM.
При отсутствии объекта, до которого производится измерение, выходное напряжение резонансного контура, состоящего из катушки L2 конденсатора C, имеет максимальное значение, при приближении к объекту происходит изменение индуктивности катушки L2, в результате изменяется выходное напряжение резонансного контура. Резистором R задается добротность резонансного контура таким образом, чтобы при изменении расстояния в рабочем диапазоне напряжение менялось в пределах 0,1÷0,9 от максимального значения. Зависимость выходного сигнала от расстояния показана на Фиг 2.
Выходная характеристика датчика линеаризуется с помощью котроллера по полиномам, получаемым при калибровке датчика в лабораторных условиях. Датчик при диаметре измерительной катушки 50 мм обеспечивает измерение расстояний до проводящих объектов от 1 мм до 110 мм. А мощность, потребляемая измерителем, не превышает 40 мВт. Данная схема обеспечивает при частоте генератора 2 МГц время изменения выходного сигнала от минимального до максимального 2 мксек.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 1997 |
|
RU2131591C1 |
| Автогенераторный измеритель параметров контролируемых веществ | 1976 |
|
SU613269A1 |
| Устройство для бесконтактного измерения расстояний | 1989 |
|
SU1760310A1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА (ВАРИАНТЫ) | 1998 |
|
RU2152002C1 |
| ВИХРЕТОКОВЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2020 |
|
RU2747915C1 |
| УНИВЕРСАЛЬНЫЙ СЕЛЕКТИВНЫЙ ИНДУКЦИОННЫЙ МЕТАЛЛОИСКАТЕЛЬ | 2021 |
|
RU2772406C1 |
| СПОСОБ ВИХРЕТОКОВОГО КОНТРОЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2365910C2 |
| СПОСОБ ДИСТАНЦИОННОГО ИЗМЕРЕНИЯ ТЕМПЕРАТУРЫ В ГЛУБИНЕ ОБЪЕКТА И АКУСТИЧЕСКИЙ ТЕРМОМЕТР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2061408C1 |
| РАДИОКОМПЛЕКС РОЗЫСКА МАРКЕРОВ | 1994 |
|
RU2108596C1 |
| УСТРОЙСТВО ДЛЯ ВЫЯВЛЕНИЯ ГАЗОНАСЫЩЕННЫХ СЛОЕВ НА ТИТАНОВЫХ СПЛАВАХ | 2000 |
|
RU2216728C2 |
Изобретение относится к области неразрушающего контроля и может быть использовано для измерения расстояний, в частности в качестве датчика в дефектоскопах, профилемерах, нефтяной и газовой промышленности, для измерения геометрии трубопровода и положения дефектоскопа в трубопроводе. Задача предлагаемого решения: увеличение быстродействия, уменьшение взаимного влияния датчиков друг на друга при применении в многоканальных измерительных системах. Это достигается тем, что в измерителе расстояния между датчиком и объектом из электропроводящего материала, содержащем источник питания переменного тока, присоединенный к нему измерительный канал, состоящий из индуктивного резонансного преобразователя зазора с двумя катушками, блок линеаризации выходного сигнала от перемещения, катушки выполнены с взаимно перпендикулярным расположением осей катушки генератора и катушки приемника, причем ось катушки приемника расположена перпендикулярно поверхности объекта, параллельно катушке приемника подсоединены конденсатор, резистор и соединены с генератором, усилителем, логарифмическим усилителем, детектором, аналого-цифровым преобразователем, блоком линеаризации и введен экран. Блок линеаризации выполнен в виде контроллера с алгоритмом аппроксимации нелинейной зависимости в виде полинома с коэффициентами, которые получены после калибровки в лабораторных условиях. Экран выполнен из проводящего парамагнетика, а со стороны, обращенной к объекту, со стенкой из диэлектрика. 1 з.п. ф-лы, 2 ил.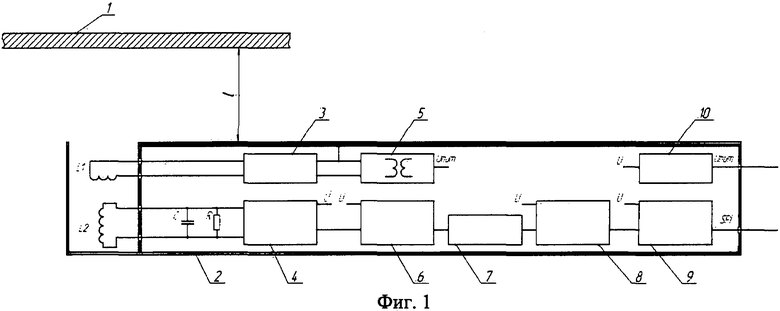
1. Измеритель расстояния между датчиком и объектом из электропроводящего материала, содержащий индуктивный преобразователь зазора с двумя катушками индуктивности, одна из которых соединена с генератором, а вторая является катушкой приемника, блок линеаризации выходного сигнала от перемещения, отличающийся тем, что катушки генератора и приемника выполнены с взаимно перпендикулярным расположением осей, причем катушка генератора расположена в середине катушки приемника и ее ось параллельна поверхности объекта, до которого измеряется расстояние, при этом на генераторную катушку подается трапецеидальный сигнал от генератора, параллельно приемной катушке подсоединены конденсатор и резистор, усилитель, сигнал с которого подается на логарифмический усилитель с детектором и далее на блок линеаризации.
2. Измеритель расстояния между датчиком и объектом из электропроводящего материала по п. 1, отличающийся тем, что блок линеаризации выполнен в виде контроллера с алгоритмом аппроксимации нелинейной зависимости в виде полинома с коэффициентами, которые получены после калибровки в лабораторных условиях.
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ РАССТОЯНИЯ | 1991 |
|
RU2023978C1 |
| Устройство для бесконтактного измерения расстояний | 1989 |
|
SU1760310A1 |
| Дифференциальный индуктивный датчик микроперемещений | 1990 |
|
SU1747869A1 |
| JP 2010164472 А, 29.07.2010 | |||
| JP 2001183106 А, 06.07.2001 | |||

