Предлагаемое изобретение относится к области измерительной техники и может быть использовано для создания средств измерения координат, скорости и угловых величин объекта в автоматических схемах управления в прецизионном машиностроении и приборостроении.
Известно устройство, реализующее способ дистанционного определения положения объекта [1] . Известное устройство состоит из двух катушек индуктивности с взаимно ортогональными осями, генератора переменных напряжений, у которого первый и второй выходы подключены к выводам первой катушки индуктивности, а третий и четвертый выходы - к выводам второй катушки индуктивности, двух трехкомпонентных датчиков, шести усилителей переменных напряжений, вход каждого из которых подключен к соответствующему выходу одного из трехкомпонентных датчиков, и двенадцати преобразовательных блоков. Параллельно соединенные первые входы первого и седьмого, второго и восьмого, третьего и девятого, четвертого и десятого, пятого и одиннадцатого, шестого и двенадцатого преобразовательных блоков подключены соответственно к выходам первого, второго, третьего, четвертого, пятого и шестого усилителей переменных напряжений. Вторые входы первого, второго, третьего, четвертого, пятого и шестого преобразовательных блоков подключены к пятому, а вторые входы седьмого, восьмого, девятого, десятого, одиннадцатого и двенадцатого преобразовательных блоков подключены к шестому выходу генератора переменных напряжений. При этом оба трехкомпонентных датчика размещены на объекте.
Известное устройство работает следующим образом. Генератор переменных напряжений создает переменные напряжения с частотами f1 и f2, одно из которых подается на первую катушку индуктивности, а второе напряжение подается на вторую катушку индуктивности. Токи, протекающие в катушках индуктивности, создают переменные магнитные поля с соответствующими частотами f1 и f2. Магнитные поля индуцируют три переменные ЭДС в каждом из трехкомпонентных датчиков, пропорциональные составляющим векторов магнитной индукции. Эти ЭДС усиливаются усилителями переменных напряжений, которые одновременно выполняют роль согласующих узлов между датчиками и преобразовательными блоками. Каждый преобразовательный блок состоит из полосового фильтра и синхронного детектора. Полосовые фильтры первого, второго, третьего, четвертого, пятого и шестого преобразовательных блоков настроены на переменные напряжения с частотой f1, а на синхронные детекторы этих блоков подается переменное напряжение с частотой f1 с пятого выхода генератора переменных напряжений. Полосовые фильтры седьмого, восьмого, девятого, десятого, одиннадцатого и двенадцатого преобразовательных блоков настроены на переменные напряжения с частотой f2, а на синхронные детекторы этих блоков подается переменное напряжение с частотой f2 с генератора переменных напряжений. В результате этого преобразовательные блоки выделяют сигналы, пропорциональные составляющим векторов магнитной индукции, созданной катушками индуктивности в местах размещения датчиков. По измеренным в двух точках пространства значениям составляющих векторов магнитной индукции и взаимному расположению трехкомпонентных датчиков определяют координаты датчиков относительно катушек индуктивности, а значит, и координаты объекта и векторы дипольных магнитных моментов катушек индуктивности, например, по алгоритму, изложенному в работе [2]. Угловое положение катушек индуктивности, а значит, и объекта определяют по направляющим косинусам векторов магнитных моментов упомянутых катушек индуктивности
В известном устройстве при наличии электропроводящих поверхностей вблизи катушек индуктивности и датчиков переменное магнитное поле, созданное катушками индуктивности, отражается от электропроводящих поверхностей (магнитное поле вихревых токов) и индуцирует в трехкомпонентных датчиках переменные ЭДС ложного сигнала, что снижает точность определения положения объекта. Кроме того, в известном устройстве определение положения объектов осуществляется численным методом с большими затратами времени на обработку информации.
Известно устройство для дистанционного определения положения объекта [3] , которое по совокупности существенных признаков наиболее близко предлагаемому и принято за прототип. Известное устройство состоит из трехкомпонентного источника магнитного поля (три катушки индуктивности с взаимно ортогональными осями), трехкомпонентного магниточувствительного датчика с взаимно ортогональными осями чувствительности, размещенного на объекте, генератора переменных напряжений и девяти усилительно-преобразовательных блоков, из которых первые входы первого, второго и третьего усилительно-преобразовательных блоков подключены к первому выходу магниточувствительного датчика, первые входы четвертого, пятого и шестого усилительно-преобразовательных блоков подключены к второму выходу магниточувствительного датчика, первые входы седьмого, восьмого и девятого усилительно-преобразовательных блоков подключены к третьему выходу магниточувствительного датчика, а выходы всех усилительно-преобразовательных блоков являются выходами устройства. Первый и второй выходы генератора переменных напряжений подключены к выводам первой катушки индуктивности, третий и четвертый выходы генератора переменных напряжений подключены к выводам второй катушки индуктивности, пятый и шестой выходы генератора переменных напряжений подключены к выводам третьей катушки индуктивности, при этом вторые входы первого, четвертого и седьмого усилительно-преобразовательных блоков подключены к седьмому выходу генератора переменных напряжений, вторые входы второго, пятого и восьмого усилительно-преобразовательных блоков подключены к восьмому выходу генератора переменных напряжений, а вторые входы третьего, шестого и девятого усилительно-преобразовательных блоков подключены к девятому выходу этого генератора.
Известное устройство работает следующим образом. В катушках индуктивности, подключенных к генератору переменных напряжений, протекают переменные токи разных частот f1, f2, f3. В результате этого катушки индуктивности воспроизводят переменные магнитные поля с частотами f1, f2, f3. В трехкомпонентном магниточувствительном датчике индуцируются переменные ЭДС, каждая из которых пропорциональна составляющей вектора магнитной индукции, созданной катушками индуктивности с соответствующими частотами f1, f2, f3. Эти ЭДС усиливаются и детектируются девятью усилительно-преобразовательными блоками, каждый из которых состоит из избирательного усилителя и синхронного детектора. Для этого на вторые входы первого, четвертого и седьмого усилительно-преобразовательных блоков подается опорное напряжение с частотой f1 с генератора переменных напряжений, на вторые входы второго, пятого и восьмого усилительно-преобразовательных блоков подается опорное напряжение с частотой f2 с генератора переменных напряжений, на вторые входы третьего, шестого и девятого усилительно-преобразовательных блоков подается опорное напряжение с частотой f3 с генератора переменных напряжений, при этом на первые входы первого, второго и третьего усилительно-преобразовательных блоков подается сигнал с первого выхода датчика, на первые входы четвертого, пятого и шестого усилительно-преобразовательных блоков подается сигнал с второго выхода датчика, а на первые входы седьмого, восьмого и девятого усилительно-преобразовательных блоков подается сигнал с третьего выхода датчика. В результате этого на выходах первого, четвертого и седьмого усилительно-преобразовательных блоков будут сигналы, пропорциональные составляющим вектора магнитной индукции, созданной первой катушкой индуктивности, на выходах второго, пятого и восьмого усилительно-преобразовательных блоков будут сигналы, пропорциональные составляющим вектора магнитной индукции, созданной второй катушкой индуктивности, и на выходах третьего, шестого и девятого усилительно-преобразовательных блоков будут сигналы, пропорциональные составляющим вектора магнитной индукции, созданной третьей катушкой индуктивности. По известным магнитным моментам катушек индуктивности и измеренным составляющим векторов магнитной индукции определяют координаты и угловое положение датчика в системе координат, образованной взаимно ортогональными осями катушек индуктивности.
В известном устройстве при наличии электропроводящих поверхностей вблизи катушек индуктивности (трехкомпонентного источника магнитного поля) и датчика переменное магнитное поле, созданное катушками индуктивности, отражается от электропроводящих поверхностей (магнитное поле вихревых токов) и индуцирует в датчике переменные ЭДС ложного сигнала, что снижает точность определения положения объекта.
Задачей предлагаемого изобретения является создание устройства для дистанционного определения положения объекта, отличающегося от прототипа существенным уменьшением влияния магнитного поля вихревых токов электропроводящих поверхностей на результат дистанционного определения положения объекта.
Поставленная задача дистанционного определения положения объекта решается за счет измерения трехкомпонентным магниточувствительным датчиком, размещенным на объекте, составляющих векторов магнитной индукции, воспроизводимой источником магнитного поля, в частности, тремя катушками индуктивности и проекций вектора ускорения на оси чувствительности основных и дополнительных акселерометрических датчиков. Кроме того, поставленная задача дистанционного определения положения объекта решается за счет измерения трехкомпонентными магниточувствительным датчиком, размещенном на объекте, составляющих вектора магнитной индукции геомагнитного поля и составляющих векторов магнитной индукции переменного магнитного поля, воспроизводимого тремя взаимно ортогональными катушками индуктивности, составляющих вектора магнитной индукции геомагнитного поля вторым трехкомпонентным магниточувствительным датчиком, у которого оси чувствительности коллинеарны соответствующим осям катушек индуктивности, а также измерении составляющих вектора ускорения двумя трехкомпонентными акселерометрическими датчиками.
Предлагаемое изобретение представляет собой два устройства для дистанционного определения положения объекта, связанных между собой настолько, что они образуют единый общий изобретательский замысел.
Предлагаемое устройство для дистанционного определения положения объекта (по первому варианту), включающее трехкомпонентный источник магнитного поля, состоящий из трех катушек индуктивности с взаимно ортогональными осями, трехкомпонентный магниточувствительный датчик с взаимно ортогональными осями чувствительности, размещенный на объекте, девять усилительно-преобразовательных блоков, из которых первые входы первого, второго и третьего усилительно-преобразовательных блоков подключены к первому выходу магниточувствительного датчика, первые входы четвертого, пятого и шестого усилительно-преобразовательных блоков подключены к второму выходу магниточувствительного датчика, первые входы седьмого, восьмого и девятого усилительно-преобразовательных блоков подключены к третьему выходу магниточувствительного датчика, и генератор переменных напряжений, у которого первый и второй выходы подключены к выводам первой катушки индуктивности, третий и четвертый выходы подключены к выводам второй катушки индуктивности, пятый и шестой выходы подключены к выводам третьей катушки индуктивности, седьмой выход подключен к вторым входам первого, четвертого и седьмого усилительно-преобразовательных блоков, восьмой выход подключен к вторым входам второго, пятого и восьмого усилительно-преобразовательных блоков и девятый выход - к вторым входам третьего, шестого и девятого усилительно-преобразовательных блоков, снабжено тремя основными акселерометрическими датчиками с взаимно ортогональными осями чувствительности, размещенными на объекте, тремя дополнительными акселерометрическими датчиками с взаимно ортогональными осями чувствительности и блоком обработки измеренных сигналов, у которого первый, второй и третий входы подключены к соответствующим трем выходам основных акселерометрических датчиков, четвертый, пятый и шестой входы подключены к соответствующим трем выходам дополнительных акселерометрических датчиков, а седьмой, восьмой, девятый, десятый, одиннадцатый, двенадцатый, тринадцатый, четырнадцатый и пятнадцатый входы подключены к соответствующим выходам первого, второго, третьего, четвертого, пятого, шестого, седьмого, восьмого и девятого усилительно-преобразовательных блоков, при этом оси чувствительности основных акселерометрических датчиков коллинеарны соответствующим осям чувствительности магниточувствительного датчика, а оси чувствительности дополнительных акселерометрических датчиков коллинеарны соответствующим осям трех катушек индуктивности.
Предлагаемое устройство для дистанционного определения положения объекта (по второму варианту), включающее трехкомпонентный источник магнитного поля, состоящий из трех катушек индуктивности с взаимно ортогональными осями, трехкомпонентный магниточувствительный датчик с взаимно ортогональными осями чувствительности, размещенный на объекте, девять усилительно-преобразовательных блоков, из которых первые входы первого, второго и третьего усилительно-преобразовательных блоков подключены к первому выходу магниточувствительного датчика, первые входы четвертого, пятого и шестого усилительно-преобразовательных блоков подключены к второму выходу магниточувствительного датчика, первые входы седьмого, восьмого и девятого усилительно-преобразовательных блоков подключены к третьему выходу магниточувствительного датчика, и генератор переменных напряжений, у которого первый и второй выходы подключены к выводам первой катушки индуктивности, третий и четвертый выходы подключены к выводам второй катушки индуктивности, пятый и шестой выходы подключены к выводам третьей катушки индуктивности, седьмой выход подключен к вторым входам первого, четвертого и седьмого усилительно-преобразовательных блоков, восьмой выход подключен к вторым входам второго, пятого и восьмого усилительно-преобразовательных блоков и девятый выход - к вторым входам третьего, шестого и девятого усилительно-преобразовательных блоков, снабжено вторым трехкомпонентным магниточувствительным датчиком с взаимно ортогональными осями чувствительности, коллинеарными соответствующим осям катушек индуктивности, десятым, одиннадцатым и двенадцатым усилительно-преобразовательными блоками и блоком обработки измеренных сигналов, при этом у генератора переменных напряжений десятый выход подключен к третьим входам первого, четвертого и седьмого усилительно-преобразовательных блоков, одиннадцатый выход подключен к вторым входам десятого, одиннадцатого и двенадцатого усилительно-преобразовательных блоков, двенадцатый выход подключен к первому входу первого датчика, а тринадцатый выход - к первому входу второго датчика, причем первые и вторые выходы первого, четвертого и седьмого усилительно-преобразовательных блоков и выходы второго, третьего, пятого, шестого, восьмого, девятого, десятого, одиннадцатого и двенадцатого усилительно-преобразовательных блоков подключены к соответствующим входам блока обработки измеренных сигналов, вторые выходы первого, четвертого и седьмого усилительно-преобразовательных блоков подключены соответственно к второму, третьему и четвертому входам первого датчика, а выходы десятого, одиннадцатого и двенадцатого усилительно-преобразовательных блоков подключены соответственно к второму, третьему и четвертому входам второго датчика. Кроме того, устройство для дистанционного определения положения объекта по второму варианту может быть снабжено основным терхкомпонентным акселерометрическим датчиком, размещенным на объекте, и дополнительным трехкомпонентным акселерометрическим датчиком, при этом три выхода основного и три выхода дополнительного акселерометрических датчиков подключены к соответствующим входам блока обработки измеренных сигналов, оси чувствительности основного трехкомпонентного акселерометрического датчика коллинеарны соответствующим осям чувствительности первого трехкомпонентного магниточувствительного датчика, а оси чувствительности дополнительного трехкомпонентного акселерометрического датчика коллинеарны соответствующим осям чувствительности второго трехкомпонентного магниточувствительного датчика.
Применение в предлагаемом техническом решении по первому варианту трехкомпонентного источника магнитного поля, состоящего из трех катушек индуктивности с взаимно ортогональными осями, трехкомпонентного магниточувствительного датчика с взаимно ортогональными осями чувствительности, размещенного на объекте, девяти усилительно-преобразовательных блоков и генератора переменных напряжений в совокупности с блоком обработки измеренных сигналов, тремя основными и тремя дополнительными акселерометрическими датчиками, включенными между собой определенным образом, обеспечивает существенное уменьшение влияния магнитного поля вихревых токов электропроводящих поверхностей, размещенных вблизи трехкомпонентного источника магнитного поля и трехкомпонентного магниточувствительного датчика, на результаты дистанционного определения положения объекта.
Применение в предлагаемом техническом решении по второму варианту трехкомпонентного источника магнитного поля, состоящего из трех катушек индуктивности с взаимно ортогональными осями, трехкомпонентного магниточувствительного датчика с взаимно ортогональными осями чувствительности, размещенного на объекте, девяти усилительно-преобразовательных блоков и генератора переменных напряжений в совокупности с блоком обработки измеренных сигналов, вторым трехкомпонентным магниточувствительным датчиком, у которого оси чувствительности коллинеарны соответствующим осям катушек индуктивности, включенных между собой определенным образом, обеспечивает существенное уменьшение влияния магнитного поля вихревых токов электропроводящих поверхностей, размещенных вблизи трехкомпонентного источника магнитного поля и первого трехкомпонентного датчика на результат дистанционного определения положения объекта. Кроме того, применение основного трехкомпонентного акселерометрического датчика, размещенного на объекте, оси чувствительности которого коллинеарны соответствующим осям чувствительности первого трехкомпонентного магниточувствительного датчика, и дополнительного трехкомпонентного акселерометрического датчика, оси чувствительности которого коллинеарны соответствующим осям чувствительности второго трехкомпонентного магниточувствительного датчика, обеспечивает существенное уменьшение влияния вихревых токов электропроводящих поверхностей на результат дистанционного определения положения объекта.
Таким образом, технический результат предлагаемого устройства для дистанционного определения положения объекта (его варианты) выражается в существенном уменьшении влияния магнитного вихревых токов электропроводящих поверхностей на результат дистанционного определения положения объекта, что повышает точность определения положения объекта.
Сущность предлагаемого изобретения поясняется следующими графическими материалами.
На фиг. 1 изображена структурная схема устройства для дистанционного определения положения объекта по первому варианту.
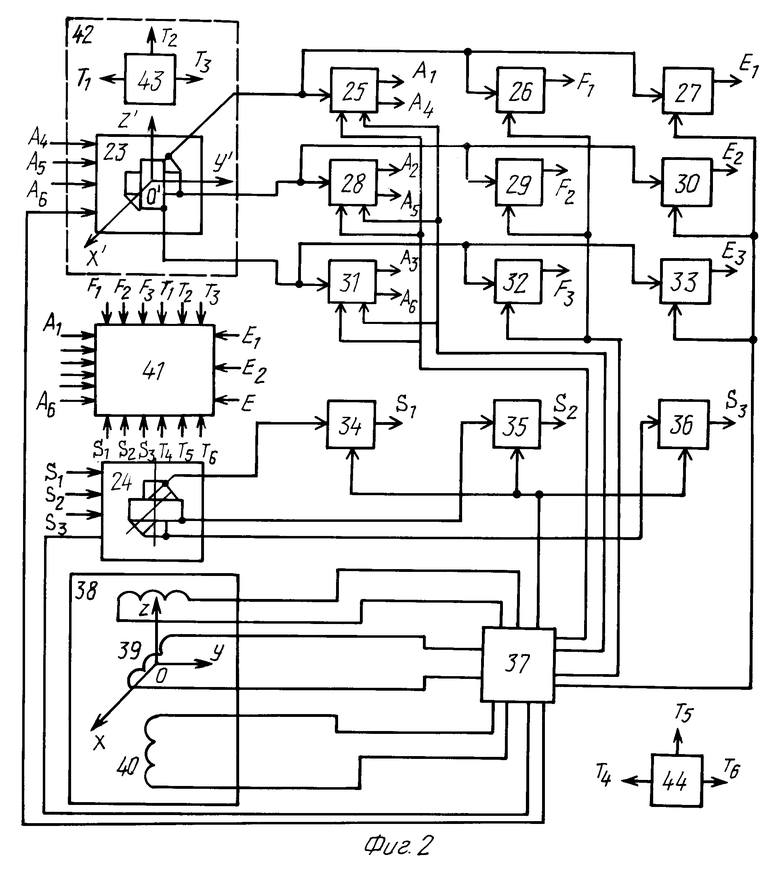
На фиг. 2 изображена структурная схема устройства для дистанционного определения положения объекта по второму варианту.
Предлагаемое устройство для дистанционного определения положения объекта по первому варианту состоит (фиг. 1) из трехкомпонентного магниточувствительного датчика 1 с взаимно ортогональными осями чувствительности, являющихся осями декартовой системы координат O'X'Y'Z', девяти усилительно-преобразовательных блоков 2-10, генератора переменных напряжений 11, источника магнитного поля, выполненного в виде трех катушек индуктивности 12-14 с взаимно ортогональными осями, совпадающими с осями декоративной системы координат OXYZ, трех основных акселерометрических датчиков 15-17, оси чувствительности которых коллинеарны соответствующим осям O'X', O'Y', O'Z' датчика 1, трех дополнительных акселерометрических датчиков 18-20,оси чувствительности которых коллинеарны соответствующим осям OX, OY, OZ катушек индуктивности 13, 12, 14, блока обработки измеренных сигналов 21, входы которого подключены к соответствующим выходам датчиков 15-20, и подвижного объекта 22, на котором размещены датчики 1, 15-17. При этом первые входы блоков 2-4 подключены к первому выходу датчика 1 , первые входы блоков 5-7 подключены к второму выходу датчика 1, первые входы блоков 8-10 подключены к третьему выходу датчика 1, первый и второй выходы генератора 11 подключены к выводам катушки 13, третий и четвертый выходы генератора 11 подключены к выводам катушки 12, пятый и шестой выходы генератора 11 подключены к выводам катушки 14, седьмой выход генератора 11 подключен к вторым входам блоков 2, 5 и 8, восьмой выход генератора 11 подключен к вторым входам блоков 2, 6 и 9, а девятый выход генератора 11 подключен к вторым входам блоков 4, 7 и 10.
Предлагаемое устройство для дистанционного определения положения объекта по второму варианту состоит (фиг. 2) из трехкомпонентного магниточувствительного датчика 23 с взаимно ортогональными осями чувствительности, являющихся осями декартовой системы координат O'X'Y'Z', трехкомпонентного магниточувствительного датчика 24 с взаимно ортогональными осями чувствительности, двенадцати усилительно-преобразовательных блоков 25-36, генератора переменных напряжений 37, источника магнитного поля, выполненного в виде трех катушек индуктивности 38-40 с взаимно ортогональными осями, совпадающими с осями декартовой системы координат OXYZ и коллинеарных осям чувствительности датчика 24, блока обработки измеренных сигналов 41 и подвижного объекта 42, на котором размещен датчик 23. При этом первые входы блоков 25-27 подключены к первому выходу датчика 23, первые входы блоков 28-30 подключены к второму выходу датчика 23, первые входы блоков 31-33 подключены к третьему выходу датчика 23, первый и второй выходы генератора 37 подключены к выводам катушки 39, третий и четвертый выходы генератора 37 подключены к выводам катушки 38, пятый и шестой выходы генератора 47 подключены к выводам катушки 40, седьмой выход генератора 37 подключен к вторым входам блоков 25, 28 и 31, восьмой выход генератора 37 подключен к вторым входам блоков 26, 29 и 32, девятый выход генератора 37 подключен к вторым входам блоков 27, 30 и 33, десятый выход генератора 37 подключен к третьим входам блоков 25, 28 и 31, одиннадцатый выход генератора 37 подключен к вторым входам блоков 34-36, двенадцатый выход генератора 37 подключен к первому входу датчика 23, а тринадцатый выход генератора 37 подключен к первому входу датчика 24, причем выходы A1 и A4 блока 25, выходы A2 и A5 блока 28, выходы A3 и A6 блока 31, выходы F1, F2, F3 блоков 26, 29 и 32, выходы E1, E2, E3 блоков 27, 30 и 33 подключены к соответствующим входам блока 41. Выход A4 блока 25, выход A5 блока 28 и выход A6 блока 31 подключены к соответствующим входам датчика 23, а выход S1 блока 34, выход S2 блока 35 и выход S3 блока 36 подключены к соответствующим входам датчика 24. Для ослабления влияния вихревых токов электропроводящих поверхностей предлагаемое устройство по второму варианту дополнено основным трехкомпонентным акселерометрическим датчиком 43, размещенным на объекте 42, и дополнительным трехкомпонентным акселерометрическим датчиком 44. Выходы T1, T2, T3 датчика 43 и выходы T4, T5, T6 датчика 44 подключены к соответствующим входам блока 41.
Предлагаемое устройство для дистанционного определения положения объекта по первому варианту работает следующим образом. В катушках 12-14 (фиг. 1), подключенных к генератору 11, протекают переменные токи разных частот. В результате этого катушки 12-14 воспроизводят переменные магнитные поля с частотами f1, f2, f3. В трехкомпонентном датчике 1 (например, в пассивном индукционном датчике) индуцируются переменные ЭДС с соответствующими частотами f1, f2, f3, каждая из которых пропорциональна составляющей вектора магнитной индукции, созданной катушками 12-14. Эти ЭДС усиливаются и детектируются блоками 2-10, каждый из которых состоит из избирательного усилителя и синхронного детектора. Для этого на вторые входы блоков 2-10 подаются опорные напряжения с соответствующими частотами f1, f2, f3 с генераторами 11, а на первые входы этих блоков 2-10 подаются с соответствующих выходов датчика 1 переменные ЭДС. В результате этого на выходах A1-A3, F1-F3, E1-E3 блоков 2-10 будут сигналы соответствующих полярностей, пропорциональные амплитудам составляющих векторов магнитной индукции, созданной катушками 12-14: проекциям векторов магнитной индукции B'x1, B'x2, B'x3 на ось O'X' с выходов A1, F1, E1 блоков 2-4, подключенных к первому выходу датчика 1; проекциям векторов магнитной индукции B'y1, B'y2, B'y3 на ось O'Y' с выходов A2, F2, E2 блоков 5-7, подключенных к второму выходу датчика 1; проекциям векторов магнитной индукции B'z1, B'z2, B'z3 на ось O'Z' с выходом A3, F3, E3 блоков 8-10, подключенных к третьему выходу датчика 1, где O'X', O'Y', O'Z' оси системы координат O'X'Y'Z', жестко связанные с осями датчика 1, а значит, и с объектом 22. По измеренным B'x1, B'x2, B'x3, B'y1, B'y2, B'y3, B'z1, B'z2, B'z3 и магнитным моментам Mx, My, Mz, созданным соответствующими катушками 13, 12, 14 получим следующие три системы уравнений [4]:
[Bx1 Bx2 Bx3]т = D[l1 l2 l3]т;
[By1 By2 By3]т = D[m1 m2 m3]т;
[Bz1 Bz2 Bz3]т = D[n1 n2 n3]т,
где т - знак транспонирования; Bx1, By1, Bz1 - проекции вектора магнитной индукции, коллинарные соответствующие осям OX, OY, OZ системы координат OXYZ и созданные магнитным моментом Mx; Bx2, By2, Bz2 - проекции вектора магнитной индукции, коллинеарные соответствующим осям OX, OY, OZ системы координат OXYZ и созданные магнитным моментом My; Bx3, By3 и Bz3 - проекции вектора магнитной индукции, коллинеарные соответствующим осям OX, OY, OZ системы координат OXYZ и созданные магнитным моментом Mz; Bx1, Bx2, Bx3, By1, By2, By3, Bz1, Bz2, Bz3 определяют из выражений, приведенных в работе [4]
(l1, m1, n1), (l2, m2, n2), (l2, m3, n3) - направляющие косинусы соответствующих осей O'X', O'Y', O'Z' системы координат O'X'Y'Z' [5].
Выходные сигналы с акселерометрических датчиков 15-20 (фиг. 1) пропорциональны проекциям вектора ускорения силы тяжести и вектора ускорения движущейся платформы, на котором размещено предлагаемое устройство, на оси чувствительности этих датчиков [6, 7]. Так как объект 22 изменяет свое положение относительно системы координат OXYZ, то измеренные проекции результирующего вектора ускорения датчиками 15, 16, 17 будут иметь соответствующие значения g'x, g'y, g'z, а измеренные значения проекции результирующего вектора ускорения датчиками 18, 19, 20 будут соответственно равны gx, gy, gz. Проекции вектора ускорения на оси системы координат OXYZ можно представить в виде системы трех уравнений [5]:
gx = g'xl1 + g'yl2 + g'zl3;
gy = g'xm1 + g'ym2 + g'zm3;
gz = g'xn1 + g'yn2 + g'zn3;
Значения проекций вектора ускорения на оси систем координат O'X'Y'Z' и OXYZ (фиг. 1) не зависят от влияния вихревых токов электропроводящих поверхностей, обусловленных источником переменного магнитного поля (катушками 12-14).
Решая первую систему уравнений совместно с уравнением для gx, получим: по три значения l1, которые обозначены через l11, l12, l13; по три значения l2, которые обозначим через l21, l22, l23; по три значения l3, которые обозначим через l31, l32, l33. В таком случае, каждые из l1, l2, l3 можно определить как среднее значение, которые будут соответственно равны:
l1 = (l11 + l12 + l13)/3;
l2 = (l21 + l22 + l23)/3;
l3 = (l31 + l32 + l33/3.
Аналогично, решая вторую систему уравнений совместно с уравнением для gy и решая третью систему уравнений совместно с уравнением для gz, определим значения m1, m2, m3 и n1, n2, n3.
Определение направляющих косинусов осей системы координат O'X'Y'Z' (фиг. 1) относительно системы координат OXYZ, а следовательно, и положения объекта 22 осуществляется блоком 21, на входы которого подаются выходные сигналы с блоков 2-10 и акселерометрических датчиков 15-20.
Таким образом, каждый направляющий косинус есть среднее значение трех решений, каждое из которых получено путем решения трех систем уравнений, при этом каждая система уравнений состоит из уравнения, измеренные параметры которого не зависят от влияния вихревых токов электропроводящих поверхностей, и двух уравнений, измеренные параметры которых зависят от вихревых токов электропроводящих поверхностей, что обеспечивает существенное уменьшение влияния вихревых токов электропроводящих поверхностей на дистанционное определение положения объекта по сравнению с прототипом.
Предлагаемое устройство для дистанционного определения положения объекта по второму варианту работает следующим образом. В катушках 38-40 (фиг. 2), подключенных к генератору 37, протекают переменные токи разных частот. В результате этого катушки 38-40 воспроизводят переменные магнитные поля с частотами f1, f2, f3. На входы трехкомпонентных датчиков 23 и 24, например, феррозондовых датчиков, подается переменное напряжение с генератора 37, перемагничивающее магниточувствительные элементы этих датчиков. В результате этого на трех выходах каждого из датчиков 23 и 24 появляются ЭДС с удвоенной частотой перемагничивания, которые пропорциональны проекциям вектора магнитной индукции геомагнитного поля и проекциям векторов магнитной индукции магнитного поля, воспроизводимого катушками 38-40. При этом частота магнитного поля, воспроизводимого каждой из катушек 38-40, много меньше частоты напряжения перемагничивающего магниточувствительные элементы датчиков 23 и 24 [8, с. 139, рис. 50 "а"]. Выходные сигналы с датчиков 23 и 24 усиливаются и детектируются блоками 25-36. Для этого каждый из блоков 25, 28 и 31 состоит из усилителя напряжения, синхронного детектора, на вход которого подается опорное напряжение с генератора 37 с удвоенной частотой напряжения перемагничивания магниточувствительных элементов датчиков 23 и 24, фильтра нижних частот и низкочастотного синхронного детектора [8, с. 139, рис. 50 "а"]; каждый из блоков 26-33 состоит из усилителя напряжения и низкочастотного синхронного детектора, а каждый из блоков 34-36 состоит из усилителя напряжения, синхронного детектора и фильтра нижних частот. С генератора 37 подаются напряжения: опорное напряжение на низкочастотные синхронные детекторы блоков 25-27 с частотой, равной частоте напряжения на катушке 39; опорное напряжение на низкочастотные синхронные детекторы блоков 28-30 с частотой, равной частоте напряжения на катушке 38; опорное напряжение на низкочастотные синхронные детекторы блоков 31-33 с частотой, равной частоте напряжения на катушке 40; опорное напряжение на синхронные детекторы блоков 34-36 с частотой напряжения, равной удвоенной частоте напряжения перемагничивания магниточувствительных элементов датчиков 23 и 24. Сигналы с выходов A4, A5, A6 с фильтров нижних частот блоков 25, 28 и 31 подаются на входы датчика 23, осуществляя компенсацию вектора магнитной индукции геомагнитного поля в объеме магниточувствительного элемента датчика [8, 9], а сигналы с выходов S1, S2, S3 с фильтров нижних частот блоков 34-36 подаются на входы датчика 24, осуществляя компенсацию вектора магнитной индукции геомагнитного поля в объеме магниточувствительного элемента датчика. В результате этого на выходах A4, A5, A6 и S1, S2, S3 будут сигналы, пропорциональные проекциям вектора магнитной индукции геомагнитного поля на оси чувствительности датчиков 23 и 24, соответственно равные B'x, B'y, B'z и Bx, By, Bz; на выходах A1, A2, A3 будут сигналы, пропорциональные проекциям векторов магнитной индукции B'x1, B'x2, B'x3 на ось O'X', созданные соответствующими катушками 39, 38, 40; на выходах F1, F2, F3 будут сигналы, пропорциональные проекциям векторов магнитной индукции B'y1, B'y2, B'y3 на ось O'Y', созданные соответствующими катушками 39, 38, 40, а на выходах E1, E2, E3 будут сигналы, пропорциональные проекциям векторов магнитной индукции B'z1, B'z2, B'z3 на ось O'Z', созданные соответствующими катушками 39, 38, 40. Выходные сигналы с блоков 25-36 подаются на входы блока 41. По измеренным B'x1, B'x2, B'x3, B'y1, By2, B'y3, B'z1, B'z2, B'z3 и магнитным моментам Mx, My, Mz, созданным соответствующими катушками 39, 38, 40 получим три системы уравнений, как и для устройства дистанционного определения положения объекта по первому варианту.
Проекции вектора магнитной индукции геомагнитного поля на оси системы координат OXYZ являются функциями проекций вектора магнитной индукции на оси системы координат O'X'Y'Z' и направляющих косинусов осей системы координат O'X'Y'Z' относительно опорной системы координат OXYZ, которые можно представить в виде системы трех уравнений [5]:
Bx = B'xl1 + B'yl2 + B'zl3;
By = B'xm1 + B'ym2 + B'zm3;
Bz = B'xn2 + B'zn3.
Значения проекций вектора магнитной индукции геомагнитного поля на оси системы координат O'X'Y'Z' и OXYZ (фиг. 2) не зависят от влияния вихревых токов электропроводящих поверхностей, обусловленных источников переменного магнитного поля (катушками 38-40).
Определение направляющих косинусов осей системы координат O'X'Y'Z' (фиг. 2) относительно системы координат OXYZ, а следовательно, и положения объекта 42 осуществляется блоком 41. Решая три системы уравнений для устройства по первому варианту с соответствующими уравнениями для Bx, By, Bz определим каждый направляющий косинус, как среднее значение трех решений, каждое из которых получено путем решения трех систем уравнений, при этом каждая система уравнений состоит из уравнения, измеренные параметры которого не зависят от влияния вихревых токов электропроводящих поверхностей, и двух уравнений, измеренные параметры которых зависят от влияния вихревых токов электропроводящих поверхностей, что обеспечивает существенное уменьшение влияния вихревых токов электропроводящих поверхностей на дистанционное определение положения объекта по сравнению с прототипом.
Предлагаемое устройство по второму варианту, включающее трехкомпонентный акселерометрический датчик 43 (фиг. 2), размещенный на объекте 42, и трехкомпонентный акселерометрический датчик 44, выходы которых T1, T2, T3 и T4, T5, T6 подключены к соответствующим входам блока 41, обеспечивает существенное уменьшение влияния вихревых токов электропроводящих поверхностей, размещенных вблизи трехкомпонентного источника магнитного поля и первого трехкомпонентного магниточувствительного датчика, на результат дистанционного определения положения объекта. Это обусловлено тем, что наличие датчиков 43 и 44 для устройства по второму варианту позволяет реализовать, как и для устройства по первому варианту, уравнения для проекций вектора ускорения gx, gy, gz, так и для устройства по второму варианту уравнения для проекций вектора магнитной индукции геомагнитного поля Bx, By, Bz, а также общие для устройств по первому и второму вариантам три системы уравнений для проекций векторов магнитной индукции переменных магнитных полей (Bx1, By1, Bz1), (Bx2, By2, Bz2), (Bx3, By3, Bz3). Решая три системы уравнений для проекций векторов магнитной индукции переменных магнитных полей с уравнениями проекций вектора ускорения и проекций вектора магнитной индукции геомагнитного поля определим каждый направляющий косинус, как среднее значение трех решений, каждое из которых получено путем решения трех систем уравнений, при этом каждая система уравнений состоит из двух уравнений (например, для gx и Bx), измеренные параметры которых не зависят от влияния вихревых токов электропроводящих поверхностей, и одного уравнения (например, для Bx1), измеренные параметры которого зависят от влияния вихревых токов электропроводящих поверхностей, что обеспечивает существенное уменьшение влияния магнитного поля вихревых токов электропроводящих поверхностей на дистанционное определение положения объекта по сравнению с прототипом.
Таким образом, технический результат предлагаемого устройства (его варианты) выражается в существенном уменьшении влияния магнитного поля вихревых токов электропроводящих поверхностей на результат дистанционного определения положения объекта, что повышает точность дистанционного определения положения объекта.
В предлагаемом устройстве (его вариантах) катушки индуктивности могут быть выполнены в виде мер магнитного момента, трехкомпонентный пассивный магниточувствительный датчик может быть реализован из пассивных однокомпонентных индукционных датчиков, а трехкомпонентные феррозондовые датчики и усилительно-преобразовательные блоки могут быть выполнены аналогично как и в известном устройстве [9, с. 108-110, 117, 127-139, 162-168; 8, с. 139, рис. 50 "а"] . Акселерометрические датчики могут быть выполнены аналогично известным датчикам [6, 7], а блоком обработки измеренных сигналов может быть преобразователь измерительный многоканальный (ПИМ-1, сертификат N 15660-96, Госстандарт России), разработанный АО "АТИС" (г. С.-Петербург).
Литература
1. Смирнов Б.М. Магнитометрический метод определения углового положения объекта // Измерительная техника, 1996, N 12, с. 34-37.
2. Смирнов Б. М. Метод определения координат и магнитного момента дипольного источника поля // Измерительная техника, 1998, N 9, c. 40-42.
3. Пат N 2103664 РФ. МКИ G 01 C 21/08. Устройство для дистанционного определения положения объекта (его варианты) / Б.М. Смирнов // Открытия. Изобретения, 1998, N 3.
4. Смирнов Б.М. Определение координат и углового положения объекта при наличии и отсутствии контакта с ним // Измерительная техника,1998, N 2, с. 30-34.
5. Ефимов Н.В. Квадратичные формы и матрицы. М.: Наука, 1975, 160 с.
6. Шваб И.А., Селезнев А.В. Измерение угловых ускорений. М.: Машиностроение, 1983, 160 с.
7. Мельников В.Е. Электромеханические преобразователи на базе кварцевого стекла. М.: Машиностроение, 1984, 159 с.
8. Афанасьев Ю.В. Феррозонды. Л.: Энергия, 1969, 168 с.
9. Афанасьев Ю.В. Феррозондовые приборы. Л.: Энергоатомиздат, 1986, 188 с.
\ \1 Изобретение может быть использовано для создания средств измерения координат, скорости и угловых величин объекта в автоматических схемах управления в прецизионном машиностроении и приборостроении. Устройство для дистанционного определения положения объекта, по первому варианту включает трехкомпонентный источник магнитного поля, состоящий из трех катушек индуктивности с взаимно ортогональными осями, трехкомпонентный магниточувствительный датчик с взаимно ортогональными осями чувствительности, размещенный на объекте, девять усилительно-преобразовательных блоков, генератор переменных напряжений, три основных акселерометрических датчика, оси чувствительности которых коллинеарны соответствующим осям чувствительности трехкомпонентного магниточувствительного датчика, три дополнительных акселерометрических датчика, оси чувствительности которых коллинеарны соответствующим осям катушек индуктивности, и блок обработки измеренных сигналов. Устройство по второму варианту содержит второй трехкомпонентный магниточувствительный датчик, оси чувствительности которого коллинеарны осям катушек индуктивности, двенадцать усилительно-преобразовательных блоков и снабжено основным трехкомпонентным акселерометрическим датчиком, размещенным на объекте, и дополнительным трехкомпонентным акселерометрическим датчиком, выходы которых подключены к соответствующим входам блока обработки измеренных сигналов. Уменьшено влияние магнитного поля вихревых токов электропроводящих поверхностей на точность измерения. 2 с. и 1 з.п.ф-лы, 2 ил.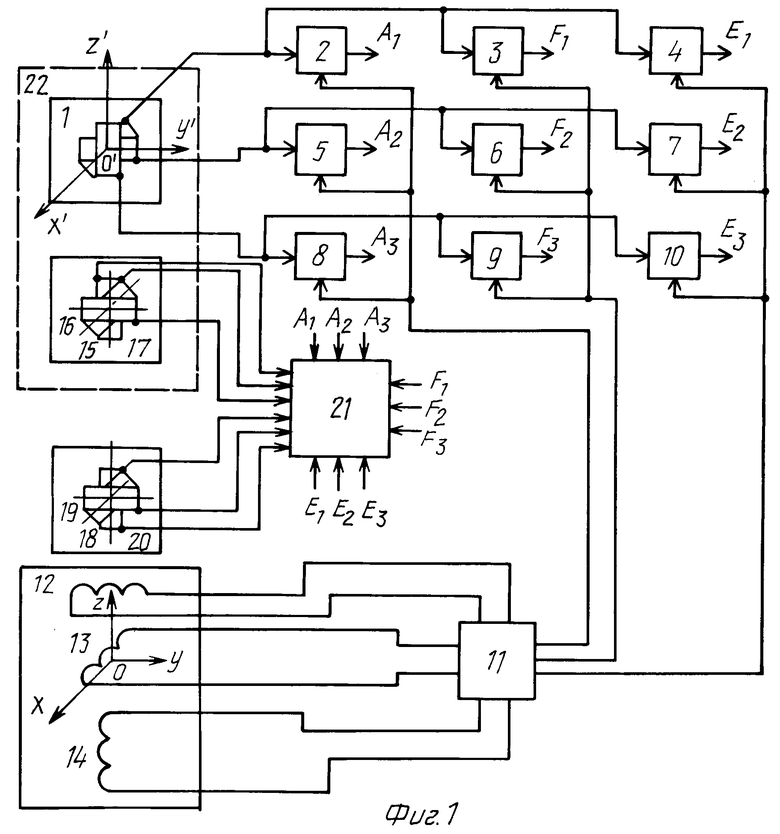
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА (ЕГО ВАРИАНТЫ) | 1996 |
|
RU2103664C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1996 |
|
RU2098764C1 |
| US 3744312 A, 10.07.1973. | |||
