Изобретение относится к железнодорожному транспорту и может быть использовано в системах диспетчерского управления на однопутных и двухпутных железных дорогах, в которых обгон или скрещение поездов осуществляют во время нахождения поездов на промежуточных станциях, имеющих, по крайней мере, два железнодорожных пути.
Известны способ и реализующая его система для организации движения поездов на однопутных железных дорогах при диспетчерской централизации, в которых обгон или скрещение поездов осуществляют во время нахождения поездов на промежуточных станциях, имеющих, по крайней мере, два железнодорожных пути, при этом разрешение приема поезда на промежуточную станцию с примыкающего к станции однопутного перегона и разрешение отправления поезда на свободный, примыкающий к станции, однопутный перегон осуществляют путем открытия соответствующего входного или выходного светофора (международная заявка WO 0128839, B61L 23/00, 26.04.2001).
Недостатком известных способа и реализующей его системы являются низкая пропускная способность участков пути, большие задержки в осуществлении перевозки, отсутствие средств контроля излома рельсов.
Известна система для интервального регулирования движения, в том числе и при диспетчерской централизации, в которой безопасные скорость и интервал между попутно следующими поездами автоматически поддерживаются локомотивными бортовыми устройствами управления совместно с устройствами автоблокировки с рельсовыми цепями (Кравцов Ю.А. «Системы железнодорожной автоматики и телемеханики», М.: Транспорт, 1996, с. 255, рис 8.1, с. 136, рис. 5.7, 5.8, с. 141 рис. 5.10).
Недостатком данного технического решения является то, что задача обнаружения опасных повреждений рельсов не решается полностью. Например, такие опасные дефекты рельсов, как внутренние поперечные трещины в центральных и боковых частях головки рельса, приводящие к хрупкому разрушению рельса под поездом, не приводят к существенному возрастанию сопротивления протеканию сигнального тока и фиксации повреждения рельса путевым приемником рельсовой цепи.
В связи с ростом скорости и веса поездов, количество не обнаруживаемых электрическими рельсовыми цепями опасных дефектов, а также скорость развития этих дефектов возрастают. Требуемая частая периодичность проверки специализированными подвижными единицами, оборудованными средствами дефектоскопии, вступает в противоречие с возможностями выделения времени в графике движения.
Наиболее близким техническим решением, взятым за прототип, является система интервального регулирования движения поездов при диспетчерской централизации, содержащая аппаратуру блок-участков, соединенную с постовыми устройствами электрической централизации (ЭЦ) станций, ограничивающих перегон, и диспетчерский центр управления, который через линию магистральной связи соединен с постовыми устройствами ЭЦ, а через стационарный радиомодем посредством радиоканала цифровой связи соединен с первыми бортовыми радиомодемами, установленными на локомотивах поездов, вовлеченных в диспетчерское управление, на каждом локомотиве первый бортовой радиомодем подключен к бортовому устройству управления локомотивом, которое своим первым портом соединено с портом локомотивного блока контроля целостности состава поезда и с первым бортовым приемником спутниковой навигации, в последнем вагоне каждого из поездов размещен вагонный блок контроля целостности состава поезда, первый порт которого соединен с первым портом микропроцессорного блока центрального управления аппаратурой последнего вагона, вход питания которого соединен с выходом автономного источника питания, первый вход блока контроля целостности состава поезда соединен с выходом второго бортового приемника спутниковой навигации, второй порт соединен с портом второго радиомодема, связанного с радиоканалом цифровой связи, а первый выход через дополнительный клапан торможения соединен с тормозной магистралью поезда, где выходы локомотивного и вагонного блоков контроля целостности состава поезда соответственно через первый и второй электропневматические преобразователи соединены с тормозной магистралью поезда, которая соединена с входами этих блоков соответственно через первый и второй пневмоэлектрические преобразователи, причем в последнем вагоне каждого из поездов размещен блок сопряжения, первый, второй, третий и четвертый порты которого соединены соответственно с третьим портом вагонного блока контроля целостности состава поезда, с портом блока электронной регистрации, с портом блока ультразвукового контроля рельсов и со вторым портом микропроцессорного блока центрального управления аппаратурой последнего вагона (патент на изобретение РФ №2392156, B61L 27/04, B61L 3/00, 13.04.2009).
Недостатками данного технического решения являются сложность и высокая стоимость бортового оборудования и наземной инфраструктуры, что ограничивает возможность применения известной системы, особенно на малодеятельных и малодоступных участках железных дорог.
Задачей предлагаемого изобретения является разработка такого способа интервального регулирования движения поездов при диспетчерской централизации, который не требует привязки к глобальным спутниковым системам, не требует развертывания дорогостоящих инфраструктур системы GSM-R, а также специальных систем сигнализации и блокировки, размещаемых на перегоне.
Технический результат изобретения заключается в упрощении схемы управления движением поездов и в снижении стоимости оборудования, необходимого для обеспечения интервального регулирования движения поездов при диспетчерской централизации.
Технический результат достигается тем, заявляется способ интервального регулирования движения поездов при диспетчерской централизации, при котором обгон или скрещение поездов осуществляют во время нахождения поездов на промежуточных станциях, имеющих, по крайней мере, два железнодорожных пути, при этом прием поездов на промежуточную станцию с примыкающего к станции перегона и отправление поездов на примыкающий к станции перегон осуществляют при открытом входном и выходном светофоре соответственно, где аппаратура сигнализации и блокировки станций соединена с постовыми устройствами ЭЦ станций, ограничивающих перегон, а постовые устройства ЭЦ соединены между собой и с диспетчерским центром управления через линию магистральной связи, где на каждом локомотиве и поезде, обращаемом на данном участке и вовлеченном в диспетчерское управление, установлено бортовое устройство управления локомотива, которое по соответствующим каналам связи связано с первым приемопередатчиком цифрового канала радиосвязи, со средствами контроля целостности состава, со средствами контроля целостности рельсов и с контроллером устройства управления аппаратурой последнего вагона, а текущие координаты поезда непрерывно вычисляют в бортовом устройстве управления локомотива программными средствами в режиме реального времени методом учета пройденного пути с периодической их корректировкой по меткам, установленным вдоль железнодорожного полотна, согласно изобретению вдоль полотна устанавливают пассивные радиометки с возможностью многократной перезаписи информации, например RFID-типа, считывающее устройство информации пассивных RFID-меток устанавливают на локомотиве, а записывающее устройство, связанное с контроллером устройства управления аппаратурой последнего вагона, устанавливают на последнем вагоне поезда, кроме того, на поезде и в постовых устройствах ЭЦ устанавливают первые приемопередатчики локального цифрового радиоканала с дальностью действия не менее длины участков приближения для обмена информацией между собой и с постовыми устройствами ЭЦ, а в последнем вагоне поезда и дополнительно на локомотиве устанавливают вторые приемопередатчики локального цифрового радиоканала с дальностью действия не менее длины поезда для обеспечения связи бортового устройства управления локомотива с контроллером устройства управления аппаратуры заднего вагона поезда, ведение попутно следующих по перегону поездов осуществляют по предварительно составленным планам и графикам прохождения участков пути и их электронным картам, внесенным в блок электронной памяти локомотивных процессоров, а безопасные скорость и интервал между поездами контролируют и поддерживают программными средствами бортового устройства управления локомотива сзади идущего поезда, получающего исходную информацию о координатах впереди идущего поезда или о сигналах входного светофора приближающихся станций по первому цифровому радиоканалу от первых приемопередатчиков при сближении с ними на расстояние устойчивой радиосвязи и/или исходную информацию о параметрах движения впереди идущего поезда от устройства считывания пассивных RFID-меток, достаточную для расчета прогнозируемых координат его последнего вагона как для случая нормального следования поезда в соответствии с предварительно составленным планом и графиком, так и для случая экстренного или прицельного торможения.
На фигуре представлена структурная схема системы для реализации предложенного способа управления движением поездов.
Система для реализации предложенного способа управления движением поездов включает перегон 1, устройства регистрации, сигнализации и блокировки станций 2, прилегающих к перегону 1, соединенные с постовыми устройствами ЭЦ 3, которые через линию магистральной связи 4 связаны между собой и с диспетчерским центром управления 5. Вдоль перегона 1 на некотором расстоянии l друг от друга размещены идентификационные пассивные RFID-метки 6 с возможностью многократной перезаписи информации. Постовые устройства ЭЦ 3 в своем составе имеют приемопередатчики 7, которые при приближении к станциям поездов 9 посредством цифрового радиоканала 8 и установленного на поезде 9 приемопередатчика 7 обеспечивают связь постовых устройств ЭЦ 3 с бортовыми устройствами управления 10 локомотивов 11 приближающихся поездов 9. Бортовое устройство управления 10 локомотива 11 связано с локомотивным приемопередатчиком 7, с блоком электронной памяти 12 для хранения карты маршрута, плана и графика прохождения отдельных участков пути, с локомотивным устройством считывания 13 пассивных RFID-меток 6 и со вторым приемопередатчиком 14, установленным на локомотиве 11. Локомотивный приемопередатчик 14 посредством второго радиоканала цифровой связи 15 и приемопередатчика 14, установленного в последнем вагоне 16 поезда 9, осуществляет связь бортового устройства управления 10 локомотивом 11 с контроллером устройства управления аппаратуры 17 последнего вагона 16, связанного с записывающим устройством 18 пассивных RFID-меток 6.
Система для реализации предложенного способа управления движением поездов функционирует следующим образом. Предварительно перед началом движения в блок электронной памяти 12 бортового устройства управления 10 локомотива 11 заносят все необходимые данные для автоматического управления движением поезда 9: электронную карту маршрута с перечнем станций, размещенных на станциях светофоров и стрелок, перечнем идентификационных пассивных RFID-меток 6 и всех инфраструктурных особенностей, включая встречающиеся уклоны, подъемы, и сооружения вдоль маршрута с их точной координатной привязкой к железнодорожному пути, а также соответствующие план и график прохождения отдельных участков пути. В память бортового устройства управления 10 заносят также идентификационные параметры локомотива 11 и все энергодинамические и другие данные поезда 9 и локомотива 11, позволяющие в режиме реального времени рассчитывать и поддерживать оптимальную скорость в соответствии с планом и графиком и при необходимости осуществлять служебное, прицельное или экстренное торможение вплоть до полной остановки поезда 9. По этим данным в бортовом устройстве управления 10 при движении поезда 9 в режиме реального времени постоянно осуществляется также расчет и определение минимально возможного и максимально возможного расстояния до полной остановки поезда 9 в случае применения экстренного торможения. Обмен оперативной и диагностической информацией с диспетчерским центром управления 5, необходимой для безопасного управления движением поезда 9, осуществляется на станциях посредством первого локального цифрового радиоканала 8 и приемопередатчиков 7, установленных на поезде 9 и в постовом устройстве диспетчерской централизации, и соответствующих последующих связей с диспетчерским центром управления 5 через линию магистральной связи 4. В исходном состоянии на путях станции может находиться несколько поездов 9 и все выходные светофоры на станции закрыты, то есть имеют красный сигнал. Движение одного из поездов 9 на перегон 1 начинают по указанию диспетчерского центра управления 5 при включении зеленого сигнала выходного светофора на одном из путей станции. С этого момента бортовое устройство управления 10 локомотива 11 в режиме реального времени непрерывно определяет текущие координаты локомотива 11 и последнего вагона 16 методом учета пройденного пути с периодической их корректировкой по идентификационным пассивным RFID-меткам 6. Эти данные бортовым устройством управления 10 посредством цифрового радиоканала 8 и приемопередатчиков 7 передаются в постовое устройство ЭЦ 3, где они используются для временной блокировки движения других поездов 9 на перегон 1 и освободившийся путь. Из постового устройства ЭЦ 3 по линии магистральной связи 4 эти данные поступают также в постовые устройства ЭЦ 3 смежных станций и в диспетчерский центр управления 5.
Блокировка движения на перегон 1 других поездов 9 с других путей станции или попутно следующего поезда 9, прибытие которого на данную станцию ожидается, остается до тех пор, пока задний вагон 16 уходящего поезда 9 не покинет зону приближения/удаления к этой станции. Если из центра диспетчерского управления 5 поступила информация о принудительной блокировке движения других поездов 9, находящихся на этой станции, выходной светофор перед ними остается закрытым, а на выходном светофоре освободившегося пути станции и на соответствующем входном светофоре станции включается зеленый сигнал для безостановочного прохождения поезда 9, прибытие которого на данную станцию ожидается. Если из центра диспетчерского управления 5 поступила информация, что следующий поезд 9 стоит на одном из путей станции, перед ним включается зеленый сигнал выходного светофора и следующий поезд 9 начинает движение в попутном направлении на перегон 1.
Бортовое устройство управления 10 каждого поезда 9 поддерживает параметры движения и скорость в соответствии с планом и графиком прохождения маршрута и, исходя из текущей скорости, в режиме реального времени производит автоматический расчет кривой торможения и определение минимально возможного и максимально возможного расстояния поезда 9 до полной его остановки в случае применения экстренного торможения. При прохождении очередной пассивной RFID-метки 6 в нее из бортового устройства управления 10 заносят следующие данные: направление движения D, показатель применения экстренного торможения EmBr, время прохождения пассивной RFID-метки 6 последним вагоном 16 поезда 9 t, скорость поезда 9 на этот момент времени V и минимально возможное расстояние тормозного пути в случае применения экстренного торможения. При прохождении локомотивом 11 пассивной RFID-метки 6 сначала эти данные, оставленные впереди идущим поездом 9 считываются, а при прохождении последним вагоном 16 такие же данные своего поезда 9 записываются в пассивную RFID-метку 6.
По этим данным известными методами, например в соответствии с [1 и 2], в локомотивном устройстве управления 10 производится расчет прогнозируемого и действительного межпоездного интервала между своим и ранее прошедшем мимо этой метки поездом 9. Действительный межпоездной интервал Sд сравнивается с минимально допустимым межпоездным интервалом по условиям безопасного движения SM и принимается решение о возможном ускорении поезда или применении служебного или экстренного торможения. При сближении поездов 9 на расстояние, при котором между ними восстанавливается устойчивая радиосвязь, координаты заднего вагона 16 впереди идущего поезда 9 в бортовое устройство управления 10 сзади идущего поезда 9 принимаются посредством цифрового радиоканала 8. В случае считывания из пассивной RFID-метки 6 признака экстренного торможения впереди идущего поезда 9, при отсутствии информации о его координатах по первому цифровому радиоканалу 8 применяется экстренное торможение своего поезда 9.
При приближении к станции на расстояние не менее длины участка приближения восстанавливается устойчивая связь приемопередатчиков 7 по первому цифровому радиоканалу 8. В бортовое устройство управления 10 начинают поступать значения сигналов входного, предупредительного и выходного светофоров приближающейся станции. В соответствии со значениями сигналов этих светофоров, а также планом и графиком прохождения маршрута в бортовом устройстве управления 10 принимается решение о проследовании данной станции без остановки с соответствующими ограничениями по скорости или применяется служебное торможение с прицельной остановкой поезда 9 перед входным или выходным светофором.
На участках перегона 1, где расстояние устойчивой связи по первому цифровому радиоканалу 8 между попутно следующими поездами 9 ввиду особенностей рельефа может быть уменьшено, например при крутых поворотах или в тоннелях, на соответствующее расстояние необходимо уменьшить расстояние между пассивными RFID-метками 6. В особых случаях на участках, где устойчивая связь по первому цифровому радиоканалу 8 вообще не может быть реализована, предложенный способ управления движением поездов 9 на перегоне 1 при диспетчерской централизации обеспечивает ведение поездов 9 и поддержание безопасной скорости и интервала между попутно следующими поездами 9 бортовым устройством управления 10 сзади идущего поезда 9 только по данным, которые записываются и считываются с пассивных RFID-меток 6.
Заявляемый способ управления движением поездов на перегоне при диспетчерской централизации не требует привязки к глобальным спутниковым системам, развертывания дорогостоящих инфраструктур системы GSM-R, специальных систем сигнализации и блокировки, размещаемых на перегоне. При этом обеспечивается повышение пропускной способности, эффективности и стоимости осуществления перевозок.
Использованные источники
1. М.Н. Айкумбеков, Способы интервального регулирования поездов. 2009 г. Интернет ресурс http://vestnik.kazntu.kz/?q=ru/node/289
2. Асадченко В.Р. Автоматические тормоза подвижного состава, учебное пособие, изд., Маршрут, Москва, 2006 г., стр. 243-256.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ НА ПЕРЕГОНЕ ПРИ ДИСПЕТЧЕРСКОЙ ЦЕНТРАЛИЗАЦИИ | 2015 |
|
RU2601496C1 |
| Система управления распределенная автоматизированная для организации интервального регулирования движения поездов | 2021 |
|
RU2806570C2 |
| Система для управления движением поездов | 2021 |
|
RU2766016C1 |
| СИСТЕМА ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ ПРИ ДИСПЕТЧЕРСКОЙ ЦЕНТРАЛИЗАЦИИ | 2009 |
|
RU2392156C1 |
| СИСТЕМА ДЛЯ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДА НА ПЕРЕГОНЕ | 2014 |
|
RU2548645C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ ПО ЖЕЛЕЗНОЙ ДОРОГЕ, ПРОХОДЯЩЕЙ ЧЕРЕЗ ТОННЕЛИ | 2015 |
|
RU2591552C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДА ПО НЕКОДИРУЕМЫМ СТАНЦИОННЫМ ПУТЯМ И СИСТЕМА ДЛЯ ЕГО ИСПОЛЬЗОВАНИЯ | 2012 |
|
RU2497703C1 |
| СПОСОБ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2008 |
|
RU2387563C1 |
| СПОСОБ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2385248C1 |
| Система управления движением поездов по перегону | 2022 |
|
RU2783558C1 |
Изобретение относится к железнодорожному транспорту и может быть использовано в системах диспетчерского управления. Предлагаемый способ включает автоматическое поддержание локомотивными бортовыми устройствами управления безопасных скоростей и интервала между поездами, оборудованными устройствами контроля целостности состава и ультразвуковым устройством контроля целостности рельсов, и определение текущих координат поезда методом учета пройденного пути с периодической их корректировкой по пассивным радиометкам, установленным вдоль железнодорожного полотна. Причем радиометки используют с возможностью многократной перезаписи информации, запись осуществляют устройством, установленным на последнем вагоне каждого поезда, связанным с бортовым устройством управления посредством локального канала цифровой радиосвязи, а считывание информации осуществляют с помощью считывающего устройства, установленного и связанного с бортовым устройством управления на локомотиве. Ведение попутно следующих по перегону поездов осуществляют по предварительно составленным планам и графикам прохождения участков пути и их электронным картам, внесенным в блок электронной памяти локомотивного устройства управления. Причем безопасные скорость и интервал между поездами контролируют и поддерживают программными средствами бортового устройства управления локомотива сзади идущего поезда, получающего исходную информацию от устройств считывания пассивных радиометок о параметрах движения впереди идущего поезда, достаточную для расчета текущих прогнозируемых координат его последнего вагона как для случая нормального следования поезда в соответствии с планом и графиком, так и для случая экстренного или прицельного торможения, и/или исходную информацию о координатах впереди идущего поезда или о сигналах входного и выходного светофоров приближающихся станций, при сближении на расстояние устойчивой радиосвязи. При этом на поезде и станциях должны быть установлены приемопередатчики цифрового радиоканала с дальностью действия не менее длины участков приближения, связанные с локомотивным бортовым устройством управления или постовым устройством электрической централизации соответственно. Достигается упрощение схемы управления движением поездов и повышение безопасности движения. 1 ил.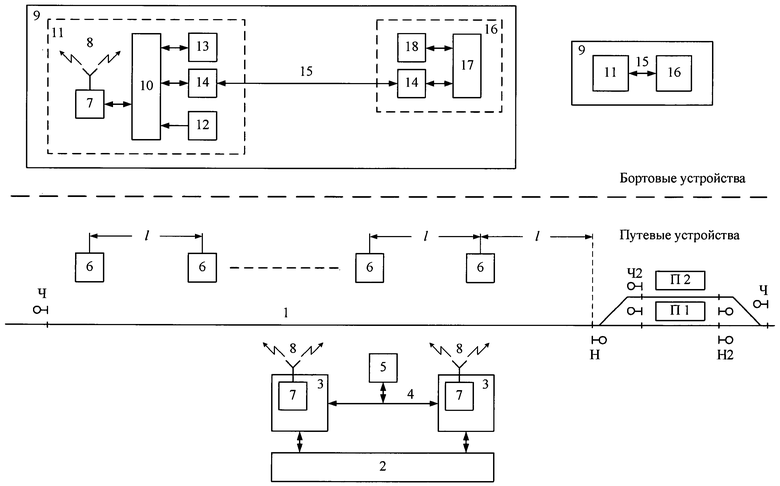
Способ управления движением поездов на перегоне при диспетчерской централизации, оборудованных устройствами контроля целостности состава и ультразвуковым устройством контроля целостности рельсов, включающий автоматическое поддержание локомотивными бортовыми устройствами управления безопасных скоростей и интервала между поездами и определение текущих координат поезда методом учета пройденного пути с периодической их корректировкой по пассивным радиометкам, установленным вдоль железнодорожного полотна, отличающийся тем, что пассивные радиометки используют с возможностью многократной перезаписи информации, запись информации в пассивные радиометки осуществляют устройством, установленным на последнем вагоне каждого поезда, связанным с бортовым устройством управления посредством локального канала цифровой радиосвязи, а считывание информации с пассивных радиометок осуществляют с помощью считывающего устройства, установленного и связанного с бортовым устройством управления на локомотиве, ведение попутно следующих по перегону поездов осуществляют по предварительно составленным планам и графикам прохождения участков пути и их электронным картам, внесенным в блок электронной памяти локомотивного устройства управления, а безопасные скорость и интервал между поездами контролируют и поддерживают программными средствами бортового устройства управления локомотива сзади идущего поезда, получающего исходную информацию от устройств считывания пассивных радиометок о параметрах движения впереди идущего поезда, достаточную для расчета текущих прогнозируемых координат его последнего вагона как для случая нормального следования поезда в соответствии с планом и графиком, так и для случая экстренного или прицельного торможения, и/или исходную информацию о координатах впереди идущего поезда или о сигналах входного и выходного светофоров приближающихся станций, при сближении на расстояние устойчивой радиосвязи, при этом на поезде и станциях должны быть установлены приемопередатчики цифрового радиоканала с дальностью действия не менее длины участков приближения, связанные с локомотивным бортовым устройством управления или постовым устройством электрической централизации соответственно.
| СИСТЕМА ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ ПРИ ДИСПЕТЧЕРСКОЙ ЦЕНТРАЛИЗАЦИИ | 2009 |
|
RU2392156C1 |
| US 20080068164 A1, 20.03.2008 | |||
| Передвижное устройство для истребления бабочек лугового мотылька электрическим током | 1930 |
|
SU23689A1 |
| RU 2008109009 A, 10.10.2009 | |||

