Расходомер роторный относится к гидравлическому оборудованию, а конкретно к средствам измерения расхода жидкостей, преимущественно повышенной вязкости и малых расходов.
По уровню техники расходомер роторный относится к расходомерам с подвижными механическими частями, в частности к проточным устройствам.
Данное предложение является промышленно применимым, так как при разработке расходомера использовались известные в мировой технике конструктивные элементы, способы и приемы.
Известны аналоги - камерные устройства для контроля расхода жидкости, в частности счетчики с овальными шестернями [П.П. Кремлевский Расходомеры и счетчики количества веществ: Справочник: Кн. 1.-5-e изд. перераб. и доп. - СПб.: Политехника, 2002. - 409 с: ил., стр. 364]. Данные счетчики также предназначены для малых расходов жидкостей, в том числе и вязких. Однако они обладают значительным сопротивлением (до 500 кПа), рекомендуемые значения зазоров для вязких жидкостей - 0,05…0,1 мм. Это требует высокой степени очистки вязких жидкостей, что не всегда выполнимо и не всегда целесообразно. Соответственно, для их обслуживания нужна достаточно чистая обстановка, что затрудняет их эксплуатацию. Кроме того, ввиду сложной геометрии овальных шестерен и высокой точности деталей счетчиков для их изготовления требуется высокоточное специализированное оборудование.
Известно устройство, принятое за прототип: Патент RU 2079811 С1 «Расходомер жидких сред», опубликовано 20.05.1997. Устройство содержит корпус с рабочей полостью, в котором установлен чувствительный вращающийся элемент в виде крыльчатки, входное и выходное отверстия, связанные с этой полостью, образующие совместно с рабочей полостью охватывающий крыльчатку канал. Корпус имеет два выступающих сектора на внутренней поверхности полости с обеих сторон чуствительного элемента - крыльчатки для создания повышенного гидравлического сопротивления в той части полости, где жидкость движется навстречу вращению лопаткам крыльчатки. Таким образом, созданы условия для несимметричного протекания жидкости в полости корпуса по двум направлениям с разными скоростями и расходами, вследствие чего происходит закручивание чувствительного элемента - крыльчатки в направлении потока жидкости с максимальными скоростью и расходом. Этот расходомер как проточная система может иметь большие значения размеров зазоров и соответственно имеет меньшее гидравлическое сопротивление и менее чувствителен к засорениям, чем указанный ранее аналог - камерное устройство.
Недостатками прототипа являются следующие особенности:
- Погрешности измерений при изменении свойств жидкости (вязкость, плотность) при малых расходах. Поскольку два потока жидкости внутри корпуса направлены как по ходу вращения крыльчатки там, где выступов нет, так и навстречу ей в зоне расположения неподвижных выступов, то на крыльчатку будут действовать как движущие, так и тормозящие силы со стороны протекающей жидкости. Для возникновения силы, действующей на лопасть крыльчатки, скорость жидкости должна отличаться от скорости края лопасти. В связи с вышеуказанным, поток жидкости, движущей крыльчатку, будет опережать ее, двигаясь в зазоре между корпусом и крыльчаткой. На оба потока жидкости будут действовать силы торможения: с одной стороны - силы трения о неподвижные стенки корпуса и выступов; с противоположной - динамические силы о края движущихся лопаток (вихреобразование), которые можно рассматривать как последовательный набор местных сопротивлений. Но местные сопротивления пропорциональны плотности жидкости и квадрату ее относительной скорости, а сопротивление от сил трения при ламинарном режиме, соответствующем малым расходам вязкой жидкости пропорционально вязкости жидкости и ее относительной скорости [Т.М. Башта Машиностроительная гидравлика: Справочное пособие. - 2-е изд., перераб. и доп. - М.: Машиностроение. 1971. - 672 с: ил.; Стр. 79, Ф. (70); Стр. 69, Ф. (50)]. Расходомер-прототип можно настроить на точное измерение расхода жидкости при постоянных условиях, но при изменении свойств жидкости (вязкость, связанная с температурой, плотность) соотношение действующих на потоки жидкости и крыльчатку сил при малых расходах изменится и возникнет непредсказуемая погрешность измерения.
- Погрешность, связанная с трением в опорах, обусловленным нагружением крыльчатки разностью давлений на входе и выходе. Перепад давлений на воде и выходе устройства из-за гидравлических сопротивлений внутри него неизбежен. Площадь лопаток крыльчатки должна быть большой, чтобы обеспечить большой периметр для создания заметных движущих сил взаимодействия с потоком, особенно при малых расходах и соответственно малых относительных скоростях потока жидкости и кромок крыльчатки. Большая площадь лопаток обуславливает большую общую поперечную площадь крыльчатки, на которую действует разность давлений на входе и выходе, нагружая опоры крыльчатки в радиальном направлении.
- Падение точности устройства при малых расходах в связи с резким снижением сил, движущих крыльчатку, из-за уменьшения относительной скорости потока (как указывалось ранее, сила взаимодействия потока жидкости с лопастями крыльчатки пропорциональна квадрату скорости).
Предлагается устройство-прототип переработать таким образом, чтобы все силы взаимодействия между потоками жидкости и чувствительным элементом являлись исключительно силами вязкостного трения, как и силы взаимодействия между потоками жидкости и корпусом.
Расходомер роторный может быть использован для измерения малых расходов вязких жидкостей в различных гидравлических системах, особенно в тех, где по условиям эксплуатации и по требованиям к системе не может быть реализована и не требуется тонкая очистка жидкости.
Область применения данного устройства ограничена максимальным расходом и минимальной вязкостью жидкости, при которых внутри устройства не возникает турбулентных течений жидкости. Это связано с тем, что в районе критических значений числа Рейнольдса и выше из-за наличия турбулентных течений пропорциональность зависимости силы трения от вязкости жидкости не выполняется, и точность измерения не гарантируется. Кроме того, при высоких скоростях движения потока жидкости становится заметным влияние местных сопротивлений (например, сужение потока на входе на выступы, расширение на выходе с выступов).
Техническим результатом при использовании данного устройства являются:
- обеспечение высокой точности измерения во всем температурном диапазоне использования расходомера, так как при чисто ламинарном режиме течения жидкости в расходомере будет обеспечена независимо от температуры пропорциональность между движущими и основными тормозящими силами, действующими на ротор и потоки жидкости внутри расходомера;
- возможность замены измеряемой расходомером жидкости любой другой без его дополнительной калибровки;
- возможность измерения сверхмалых расходов вязких жидкостей, поскольку вязкостные силы взаимодействия жидкости и чувствительного элемента в нем пропорциональны относительной скорости поверхности чувствительного элемента и потока жидкости и с уменьшением расхода убывают в меньшей степени, чем в прототипе.
Технический результат от использования расходомера роторного достигается за счет замены крыльчатки ротором - телом вращения с гладкой поверхностью.
Устройство в своем составе содержит:
Корпус 1, Выступы 2, Отверстие входное 3, Отверстие выходное 4, Ротор 5, Опоры 6, Датчик скорости вращения 7.
Техническая сущность предлагаемой конструкции и ее устройство поясняется рисунком Фиг. 1 «Расходомер роторный».
Корпус 1 в своей конструкции на внутренних поверхностях, на всех или не на всех, имеет Выступы 2, создающие условия для несимметричного обтекания жидкостью Ротора 5, вращающегося в опорах 6. Ротор 5 в общем случае может быть любой формы (полый или сплошной, барабан, один или несколько дисков, сфера и т.д.), но по условиям точности измерений обязательно должен быль телом вращения с осью, проходящей через Опоры 6, и иметь гладкую рабочую поверхность без местных неровностей, канавок и выступов, поперечных направлению потоков жидкости Q1 и Q2. Отверстие входное 3 и Отверстие выходное 4 на периферии Корпуса 1 могут быть расположены как симметрично, так и несимметрично относительно оси вращения Ротора 5. Датчик скорости вращения 7, установленный в Корпусе 1, предназначен для контроля скорости вращения Ротора 5 и может быть любой конструкции, допустимой по условиям применения, но не создающим значительного тормозного усилия.
Предлагаемая конструкция устройства расходомера роторного работает следующим образом:
Жидкость, подаваемая через Отверстие входное 3, под действием разности давлений на входе Р1 и на выходе Р2 перемещается внутри Корпуса 1 в направлении Отверстия выходного 4. Течение жидкости ввиду малых скоростей и повышенной вязкости ламинарное. Разделяясь на два потока Q1 и Q2, она обтекает Ротор 5 по внутренней полости Корпуса 1 со стороны, где есть Выступ 2 (зазор А меньше Б), и с противоположной стороны (зазор Б больше А). Наибольшая часть жидкости будет проходить со стороны большего зазора Б (Q1>Q2) и иметь скорость движения больше, чем в зазоре А, поскольку расход жидкости через плоскую щель пропорционален третьей степени величины зазора [В.К. Свешников Станочные гидроприводы: Справочник. - 3-е изд., перераб. и доп. - М.: Машиностроение. 1995. - 448 с: ил.; Стр. 380, Ф. (10.2)]. Соответственно силы вязкостного трения жидкости о поверхность ротора в зазоре Б будут больше.
Силы и моменты сил, действующие в расходомере роторном, показаны на рисунке Фиг. 2.
Для потоков жидкости Q1 и Q2 разность давлений (Р1-Р2) одна и та же.
Силы сопротивления перемещению жидкости в зазоре Б:
Fдв+Fк1=S1x(P1-P2), где
Fдв - сила взаимодействия (сила вязкостного (поверхностного) трения, поскольку неровностей на поверхности Ротора 5 нет, нет и динамических составляющих сил взаимодействия) Ротора 5 и потока Q1 жидкости, стремящаяся вращать Ротор 5;
Fк1 - сила взаимодействия (сила вязкостного (поверхностного) трения, поскольку неровностей на внутренней поверхности Корпуса 1 в зазоре Б нет) Корпуса 1 и потока Q1 жидкости;
S1 - площадь проходного сечения зазора Б.
Силы сопротивления перемещению жидкости в зазоре А:
Fт+Fк2+Fвх+Fвых=S2x(P1-P2), где
Fт - сила взаимодействия (сила вязкостного (поверхностного) трения, поскольку неровностей на поверхности Ротора 5 нет) Ротора 5 и потока Q2 жидкости, стремящаяся затормозить Ротор 5;
Fк2 - сила взаимодействия (сила вязкостного (поверхностного) трения, поскольку неровностей на поверхности Выступов 2 в зазоре А нет) Корпуса 1 и потока Q2 жидкости;
S2 - площадь проходного сечения зазора А;
Fвх, Fвых - местные (динамические) сопротивления на входе в зазор А и на выходе из него. Поскольку, в отличие от всех остальных составляющих гидравлических сопротивлений, они квадратично зависят от расхода и не зависят от вязкости жидкости, вязкость жидкости повышенная, а расходы малые, расход Q2 значительно меньше Q1, по величине местные сопротивления значительно меньше остальных составляющих. Расчеты конкретного расходомера показали, что в общем балансе сил их доля не превышает 0,1%.
Поскольку S1 больше S2, то
(Fдв+Fк1)>(Fт+Fк2+Fвх+Fвых)
Пока ротор не вращается, силы трения жидкости о Корпус 1 и Ротор 5 Fк1 и Fдв примерно равны, поскольку площади Корпуса 1 и Ротора 5 в зоне протекания потока Q1 в зазоре Б примерно одинаковы. Аналогично сила трения жидкости о Ротор 5 Fт примерно равна силе трения о Корпус 1 Fк2 в зоне протекания потока Q2 в зазоре А. Но согласно указному ранее (Fдв+Fк1)>(Fт+Fк2+Fвх+Fвых), соответственно движущая сила ротора в зазоре Б больше тормозящей в зазоре A Fдв>Fт.
Ротор 5 начнет вращение по направлению стрелки и будет ускоряться, пока не наступит равновесие моментов сил:
MFдв=MFт+MFдат+MFгидр+MFупл+MFпт+MFпд, где
MFдв - момент движущей силы Fдв, обусловленной трением вязкой жидкости о поверхность Ротора 5 в зазоре Б;
MFт - момент силы тормозящей силы Fт трения жидкости о поверхность Ротора 5 в зазоре А;
MFдат - момент силы торможения со стороны датчика вращения Ротора 5;
MFгидр - момент силы гидравлического сопротивления жидкости в конструктивных полостях, примыкающих к Ротору 5;
MFупл - момент силы трения подвижных уплотнений, если такие имеются;
MFпт - момент силы трения в Опорах 6, обусловленной силой тяжести Ротора 5 Fст;
MFпд - момент силы трения в Опорах 6, обусловленной движущей силой Fдв, силой торможения Fт, силой взаимодействия с Датчиком скорости вращения 7, силой действия Fд от разности давлений Р1 и Р2 на входе и выходе на поперечное сечение Ротора 5 Sp.
По мере разгона Ротора 5 доля потока Q1 будет увеличиваться, а доля потока Q2 - уменьшаться [Т.М. Башта Машиностроительная гидравлика: Справочное пособие. - 2-е изд., перераб. и доп. - М.: Машиностроение. 1971. - 672 с: ил.; Стр. 95, Ф. (89)]. Соответственно влияние сил на распределение потоков жидкости сил Q1 и Q2 Fвх и Fвых в силу их квадратичной зависимости от расхода Q2 будет стремиться к нулю. Согласно этой формуле возможен такой режим, при котором Q2=0. Соответственно Fвх+Fвых=0. Можно подобрать такое соотношение длины зазоров А и Б и их ширины, при котором Q2=0 во всем диапазоне измерений.
Расчеты показали, что если величины MFдат, MFупл, MFпт свести к минимуму или удалить совсем, т.е.
MFдв=MFт+MFгидр+MFпд,
то расходомер не будет чувствителен к изменениям вязкости жидкости и ее температуры, поскольку и движущие силы, и тормозящие пропорциональны вязкости жидкости и их соотношение с изменением вязкости не меняется. Выполнение этого равенства зависит лишь от общего расхода жидкости и скорости движения одной из стенок зазоров, т.е. от скорости вращения Ротора 5. В результате при соблюдении этих условий скорость вращения Ротора 5 всегда пропорциональна общему расходу жидкости через расходомер, хотя и несколько меньше скорости движения жидкости по широкому зазору.
Для устранения влияния момента силы трения подвижных уплотнений MFупл следует отказаться от них и расположить Датчик скорости вращения 5 непосредственно в Корпусе 1. Влияние момента MFдат от Датчика скорости вращения 7 на вращение Ротора 5 удаляется подбором типа датчика или иными конструктивными приемами (применение оптического датчика для прозрачных и полупрозрачных жидкостей, применение дополнительных разгружающих магнитов при применении датчиков Холла и т.п.). Момент трения MFпт от нагруженности Опор 6 силой тяжести Ротора 5 может быть устранен, как и в описании прототипа, гидростатической уравновешенностью Ротора 5. Нагруженность Опор 6 силами давления Fд на Ротор 5 со стороны Окна входного 3, движущей силой Fдв и силой торможения Fт хотя теоретически и не влияет на точность измерения расхода, конструктивно может внести погрешности. Можно уменьшить составляющую силы Fд за счет исполнения Ротора 5 в виде тонкого диска с минимальным поперечным сечением (Фиг. 3):
Sp=BхГ, где
В - толщина диска;
Г - диаметр диска.
Толщину диска В следует принимать минимальной, исходя из конструктивных соображений и из условий прочности и устойчивости диска в потоке жидкости. Полностью нагруженность Опор 6 устраняется симметричной схемой подвода и отвода жидкости с двумя Отверстиями входными 3 и двумя Отверстиями выходными 4, с двумя широкими и двумя узкими зазорами (Фиг. 4). При этом силы Fд, Fдв, Fт полностью скомпенсированы. Но при этом усложняется конструкция корпуса.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК ЖИДКИХ СРЕД, А ИМЕННО ОБЪЕМНОГО РАСХОДА И ВЯЗКОСТИ, И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2379632C1 |
| ТУРБИННЫЙ РАСХОДОМЕР | 1969 |
|
SU241724A1 |
| ТУРБИННЫЙ РАСХОДОМЕР | 2000 |
|
RU2196304C2 |
| Расходомер-вискозиметр | 1985 |
|
SU1307237A1 |
| СПОСОБ ИЗМЕРЕНИЯ РАСХОДА ЖИДКОСТИ В ДЕЙСТВУЮЩИХ НЕФТЕГАЗОВЫХ СКВАЖИНАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2260692C2 |
| Датчик контроля утечек | 2020 |
|
RU2757979C1 |
| Вязкостной датчик степени полиме-РизАции | 1979 |
|
SU813198A1 |
| СПОСОБ ИЗМЕРЕНИЯ МАССОВОГО РАСХОДА ЖИДКОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2247948C2 |
| Массовый расходомер | 1959 |
|
SU130204A1 |
| МАССОВЫЙ РАСХОДОМЕР НА ЭФФЕКТЕ КОРИОЛИСА (ВАРИАНТЫ) С ИСПОЛЬЗОВАНИЕМ КОНЦЕНТРИЧЕСКИХ РОТОРОВ И СПОСОБ ИЗМЕРЕНИЯ МАССОВОГО РАСХОДА (ВАРИАНТЫ) | 1996 |
|
RU2162207C2 |
Изобретение относится к гидравлическому оборудованию, а конкретно к средствам измерения расхода жидкостей, преимущественно повышенной вязкости и малых расходов. Расходомер состоит из корпуса с внутренней полостью и имеющимися внутри корпуса на поверхности полости выступами, с входным и выходным отверстиями, с расположенным внутри его полости вращающимся чувствительным элементом. Вращающийся чувствительный элемент является телом вращения с гладкой поверхностью с осью, проходящей через опоры элемента. Вращение этого элемента производится за счет сил вязкого трения движущейся в ламинарном режиме измеряемой жидкости о поверхность элемента. Технический результат - обеспечение высокой точности измерения во всем температурном диапазоне использования расходомера, возможность замены измеряемой расходомером жидкости любой другой без его дополнительной калибровки; возможность измерения сверхмалых расходов вязких жидкостей. 5 ил.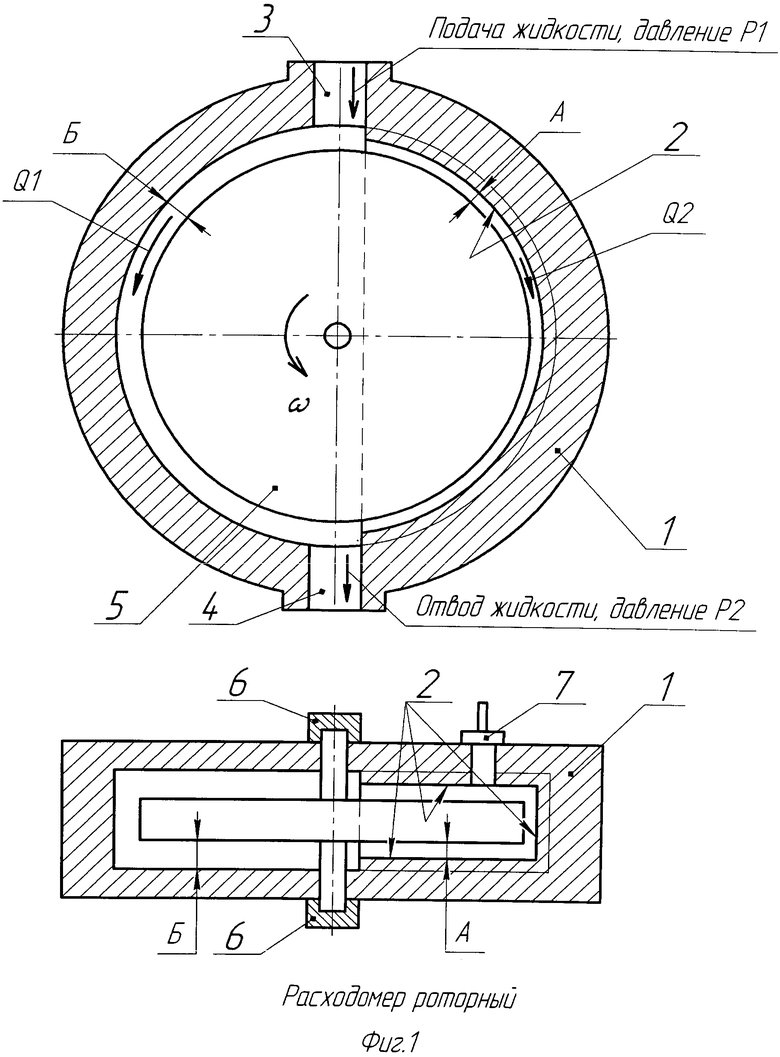
Расходомер, состоящий из корпуса с внутренней полостью и имеющимися внутри корпуса на поверхности полости выступами, с входным и выходным отверстиями, с расположенным внутри его полости вращающимся чувствительным элементом, отличающийся тем, что вращающийся чувствительный элемент является телом вращения с гладкой поверхностью с осью, проходящей через опоры элемента, а вращение этого элемента производится за счет сил вязкого трения движущейся в ламинарном режиме измеряемой жидкости о поверхность элемента.
| РАСХОДОМЕР ЖИДКИХ СРЕД | 1994 |
|
RU2079811C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ РАСХОДА ЖИДКОСТИ ИЛИ ГАЗА | 1992 |
|
RU2037142C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАСХОДА ВЕЩЕСТВА | 2000 |
|
RU2283477C2 |
| Способ возбуждения упругого импульса в воде | 1978 |
|
SU894637A1 |
| Тахометрический расходомер жидкости и газа | 1991 |
|
SU1830451A1 |

