Предлагаемое изобретение относится к области механических испытаний материалов, в частности к определению динамического коэффициента трения.
Известны различные способы определения статического и динамического коэффициентов внешнего трения. В большинстве случаев для определения статического и динамического коэффициентов внешнего трения требуется не только проведение отдельных опытов, но и использование различных устройств. Например, известен способ, применяемый для определения только статического коэффициента внешнего трения, состоящий в изменении угла наклона φ относительно горизонта двух образцов, расположенных один на другом, и измерении угла φ в момент, когда начинается скольжение одного образца относительно другого, с расчетом коэффициента m внешнего трения по формуле m=tgφ [патент США №3020744, кл. 73-9, кл. G01N 19/02, 1962]. Для определения динамического коэффициента внешнего трения этот способ неприменим.
Распространены способы определения динамического коэффициента внешнего трения, основанные на непосредственном измерении силы трения при известной или измеряемой силе прижатия образцов друг к другу. При использовании таких способов необходимы сложные силоизмерительные устройства, что затрудняет их применение, особенно при исследовании токсичных материалов, которые приходится исследовать в стесненных пространствах герметичных боксов.
Известны способы определения динамического коэффициента внешнего трения, не требующие применения силоизмерительных устройств, основанные на измерении геометрических параметров системы, связанных с величиной динамического коэффициента трения. Например, известен способ определения динамического коэффициента внешнего трения при наклоне двух образцов, нижний из которых, имеющий форму диска, приводят во вращение вокруг своей оси и наклоняют относительно горизонта, удерживая верхний образец в том месте диска, где его линейная скорость направлена вверх по уклону, при этом динамический коэффициент трения определяют по текущему значению угла наклона φ в тот момент, когда верхний образец начинает соскальзывать вниз [патент РФ №2444000, кл. G01N 19/02, опубл. 10.08.2012]. Недостатком способа является наличие усложняющего конструкцию устройства для вращения нижнего образца, а также необходимость использования в качестве одного из образцов диска с большими габаритами, что для ряда исследуемых материалов невозможно.
В тех случаях, когда габариты исследуемых образцов ограничены, более удобен «Способ экспериментального определения динамического коэффициента внешнего трения» [патент РФ №2458336, кл. G01N 19/02, опубл. 27.02.2012]. Способ позволяет ограничить путь относительного перемещения образцов при определении коэффициента трения их габаритами, однако в этом случае для достижения устойчивого относительного положения системы, необходимого для определения коэффициента трения, опыт приходится повторять многократно. Устройство для определения динамического коэффициента внешнего трения рассматриваемым способом, имеющее возможность регулируемого наклона расположенных друг на друге образцов, может быть использовано и для определения статического коэффициента внешнего трения, однако для этого требуется проведение самостоятельного опыта после переналадки устройства. Данный способ экспериментального определения динамического коэффициента внешнего трения принят в качестве прототипа.
Техническим результатом предлагаемого способа является возможность определения динамического и статического коэффициентов внешнего трения на образцах с ограниченными размерами в одном опыте, без измерения сил трения, на основании их взаимосвязи с геометрическими параметрами процесса и равенства работы, совершаемой образцом, соскальзывающим по плоской поверхности, уменьшению потенциальной энергии образца вследствие изменения его вертикального положения при соскальзывании с учетом увеличения потенциальной энергии деформируемого упругого элемента, удерживающего образец.
Технический результат достигается тем, что для определения динамического коэффициента внешнего трения используют два расположенных друг на друге образца с плоскими рабочими поверхностями, имеющие возможность наклона с изменяющимся углом относительно горизонтальной плоскости. Верхний образец имеет возможность перемещения вниз по уклону относительно рабочей поверхности нижнего образца, однако это перемещение ограничивается прикрепленным к образцу упругим элементом с постоянной жесткостью в используемом диапазоне его деформирования. В исходном положении устанавливают горизонтальное положение образцов и прикрепляют верхний из них таким образом, чтобы отсутствовала продольная деформация упругого элемента, сила воздействия которого на верхний образец при этом равна нулю. Для определения коэффициента трения наклоняют нижний образец вместе с расположенным на нем верхним образцом и измеряют угол наклона. С увеличением угла наклона возрастает скатывающая сила, действующая на подвижный образец, удерживаемый силой трения. При достижении углом наклона некоторого значения φ под действием скатывающей силы происходит соскальзывание и движение верхнего образца под уклон. Препятствующая движению образца сила трения при этом определяется уже динамическим коэффициентом внешнего трения, который обычно меньше статического, поэтому в начальный период движение верхнего образца ускоренное. При перемещении верхнего образца связанный с ним упругий элемент деформируется, в нем возникает пропорциональная величине деформации, т.е. возрастающая по мере перемещения образца, упругая сила, которая противоположна направлению скатывающей гравитационной силы и стремится удержать образец. В результате движение образца начинает замедляться и в некотором его положении прекращается.
По значению угла φ известным рассмотренным выше способом можно определить статический коэффициент трения как mст=tgφ.
Для определения динамического коэффициента трения определяют путь l, пройденный верхним образцом по поверхности нижнего. После этого проводят калибровочный опыт, в котором наклоняют систему с образцами до угла φ=90°, т.е. приводят упругий элемент вместе с подвешенным к нему верхним образцом в вертикальное положение и измеряют возникшую при этом деформацию L упругого элемента по отношению к его исходному ненагруженному состоянию. Наличие нижнего образца в калибровочном опыте не требуется.
Динамический коэффициент внешнего трения определяют по формуле 
На фиг.1 показано исходное горизонтальное положение системы;
на фиг.2 показано конечное положение верхнего образца после соскальзывания при достижении угла наклона φ и действующая система сил;
на фиг.3 показано вертикальное положение упругого элемента с верхним образцом в калибровочном опыте, где:
1 - нижний образец;
2 - верхний образец;
3 - упругий элемент.
Для определения динамического коэффициента внешнего трения используют нижний образец 1 и устанавливаемый на него верхний образец 2. Рабочим поверхностям образцов, которыми они контактируют друг с другом, придают плоскую форму.
Перед проведением опыта образцы приводят в исходное состояние. Для этого нижний образец 1 устанавливают в положение, при котором его рабочая поверхность горизонтальна (фиг.1). Верхний образец 2 устанавливают на рабочую поверхность нижнего образца 7 и прикрепляют его к упругому элементу 3 таким образом, чтобы исключить продольную деформацию последнего, что, в свою очередь, исключает силовое взаимодействие между верхним образцом 2 и упругим элементом 3. При ограниченных габаритах рабочей поверхности нижнего образца 1 в пробных опытах жесткость упругого элемента подбирают так, чтобы путь l верхнего образца 2 из исходного положения в конечное был оптимальным, при котором верхний образец 2 смещается на максимальную величину (для повышения точности результатов опыта), но гарантирующую при этом его устойчивость верхнего образца 2 относительно нижнего образца 1 (фиг.2).
При проведении опыта по определению коэффициентов трения наклоняют нижний образец 1 вместе с расположенным на нем верхним образцом 2 и измеряют угол наклона. В начальный период опыта верхний образец 2 неподвижно удерживается на поверхности нижнего образца 7 статической силой трения. С увеличением угла наклона скатывающая сила, действующая на верхний образец 2, возрастает и при достижении углом наклона некоторого значения φ под ее воздействием происходит соскальзывание верхнего образца 2 и начинается его движение вниз по уклону. Препятствующая движению образца сила трения при этом определяется уже динамическим коэффициентом внешнего трения, который обычно меньше статического, поэтому в начальный период движение верхнего образца ускоренное. По мере перемещения верхнего образца 2 связанный с ним упругий элемент 3 деформируется, в нем возникает пропорциональная величине деформации, т.е. возрастающая упругая сила, которая противоположна направлению скатывающей гравитационной силы и стремится удержать верхний образец 2. В результате движение верхнего образца 2 начинает замедляться и в определенном положении прекращается.
По значению угла φ известным, рассмотренным выше способом определяют статический коэффициент трения как mст=tgφ.
Для определения динамического коэффициента трения определяют путь l, пройденный верхним образцом 2 по поверхности нижнего образца 1 от исходного положения в конечное.
В конечном положении системы на верхний образец 2 действуют следующие силы (фиг 2).
Сила тяжести G верхнего образца 2 может быть представлена как результирующая двух составляющих по отношению к плоскости рабочих поверхностей образцов - скатывающей Gскат и нормальной GN.
Скатывающая составляющая силы тяжести
Gскат=G·sinφ.
Нормальная составляющая силы тяжести верхнего образца 2, действующая на поверхность нижнего образца 7, при значении угла наклона φ составляет

Под воздействием нормальной составляющей силы тяжести возникает сила трения между верхним 2 и нижним 7 образцами, которая в процессе движения верхнего образца 2 определяется динамическим коэффициентом трения mдин.

Удерживающая верхний образец 2 в его конечном положении сила упругого элемента 3, деформированного на величину l, составляет

где с - жесткость пружины, численное значение которой при проведении опыта неизвестно.
Для учета жесткости пружины проводят калибровочный опыт, в котором наклоняют систему с образцами до угла φ=90°, т.е. приводят упругий элемент 3 вместе с подвешенным к нему верхним образцом в вертикальное положение и измеряют возникшую при этом деформацию L упругого элемента 3 по отношению к исходному состоянию. Жесткость пружины определяется как

Для определения динамического коэффициента трения с использованием формулы (2) находят работу, затрачиваемую верхним образцом 2 на преодоление силы трения

Эта работа совершается за счет уменьшения потенциальной энергии скатывающегося вниз верхнего образца 2

Одновременно с этим увеличивается потенциальная энергия ПU упругого элемента 3. Величину этой энергии можно определить как работу по деформированию упругого элемента 3 силой, линейно изменяющейся от нулевого значения в исходном состоянии до величины U в конечном положении. Таким образом, с учетом (3) и (4)

Суммируя определенные в (6) и (7) значения, на основании закона сохранения энергии получим
А=Побр-ПU,
или, с учетом (5), (6) и (7)

После преобразования выражения (8) получим

Полученное выражение (9) для определения динамического коэффициента внешнего трения исключает необходимость взвешивания верхнего образца 2 и определения жесткости упругого элемента 3 как исходного параметра системы. Определение динамического коэффициента внешнего трения предлагаемым способом сводится к определению лишь геометрических параметров, т.е. угла наклона, при котором произойдет соскальзывание верхнего образца 2, и пройденного им до остановки в конечном положении пути l, а также к установлению в калибровочном опыте деформации упругого элемента 3 под действием силы тяжести свободно подвешенного верхнего образца 2.
Таким образом, предложен простой в реализации способ определения динамического коэффициента внешнего трения. Достоинством способа является также то, что одновременно с определением динамического коэффициента внешнего трения в том же опыте известным способом определяется и статический коэффициент внешнего трения, что исключает необходимость проведения двух разных опытов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ СТАТИЧЕСКОГО И ДИНАМИЧЕСКОГО КОЭФФИЦИЕНТОВ ВНЕШНЕГО ТРЕНИЯ | 2013 |
|
RU2537745C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКОГО КОЭФФИЦИЕНТА ВНЕШНЕГО ТРЕНИЯ МЕЖДУ ДВУМЯ ПОДВИЖНЫМИ ОБРАЗЦАМИ | 2013 |
|
RU2545073C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКОГО КОЭФФИЦИЕНТА ВНЕШНЕГО ТРЕНИЯ ОТНОСИТЕЛЬНО ВРАЩАЮЩЕЙСЯ СФЕРИЧЕСКОЙ ПОВЕРХНОСТИ | 2014 |
|
RU2565359C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТОВ ТРЕНИЯ ПОКОЯ И СКОЛЬЖЕНИЯ | 2019 |
|
RU2727330C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКОГО КОЭФФИЦИЕНТА ВНЕШНЕГО ТРЕНИЯ | 2015 |
|
RU2589955C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА ВНЕШНЕГО ТРЕНИЯ | 2011 |
|
RU2458336C1 |
| СПОСОБ ЭКСПЕРИМЕНТАЛЬНОГО ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКОГО КОЭФФИЦИЕНТА ВНЕШНЕГО ТРЕНИЯ | 2010 |
|
RU2444000C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА ТРЕНИЯ СКОЛЬЖЕНИЯ | 2021 |
|
RU2778049C1 |
| Установка для определения коэффициентов внешнего трения покоя и скольжения токсичных материалов при повышенных температурах | 2021 |
|
RU2758930C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТОВ ТРЕНИЯ | 2021 |
|
RU2754204C1 |


Использование относится к области механических испытаний материалов, в частности к определению динамического коэффициента трения. Способ определения динамического коэффициента внешнего трения заключатся в том, что используют два образца, верхний из которых помещают на плоской рабочей поверхности нижнего. Образцам обеспечивают возможность совместного наклона относительно горизонтальной плоскости. В исходном положении верхний образец прикрепляют к находящемуся в разгруженном состоянии упругому элементу, обладающему постоянной жесткостью в направлении соскальзывания верхнего образца по наклонной поверхности нижнего. Для определения динамического коэффициента внешнего трения образцы наклоняют до соскальзывания верхнего из них по уклону, измеряют угол наклона φ образцов в момент соскальзывания и путь l. пройденный верхним образцом по рабочей поверхности нижнего относительно исходного положения. Динамический коэффициент внешнего трения рассчитывают по формуле

где L - определяемая в калибровочном опыте деформация вертикально расположенного упругого элемента при свободном подвешивании к нему верхнего образца. Техническим результатом изобретения является простота определения динамического коэффициента внешнего трения, сводящегося только к экспериментальному установлению геометрических параметров без измерения усилий. 3 ил.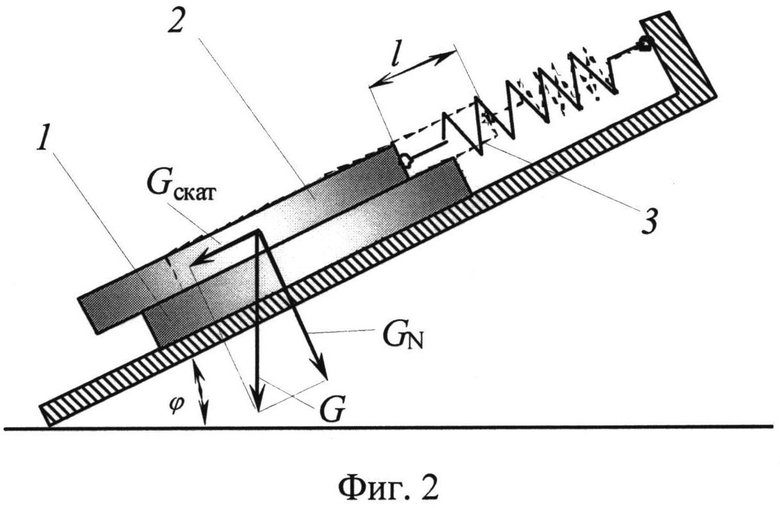
Способ определения динамического коэффициента внешнего трения с удержанием образцов на наклонной поверхности упругим элементом, имеющих возможность совместного наклона относительно горизонтальной плоскости, отличающийся тем, что верхний образец в исходном положении прикрепляют к находящемуся в разгруженном состоянии упругому элементу, обладающему постоянной жесткостью в направлении соскальзывания верхнего образца по рабочей поверхности нижнего, наклоняют образцы до соскальзывания верхнего из них вниз по уклону, измеряют угол наклона φ образцов в момент соскальзывания и путь l, пройденный верхним образцом по рабочей поверхности нижнего относительно исходного положения, после чего динамический коэффициент внешнего трения рассчитывают по формуле
где L - определяемая в калибровочном опыте деформация вертикально расположенного упругого элемента при свободном подвешивании к нему верхнего образца.
| СПОСОБ ЭКСПЕРИМЕНТАЛЬНОГО ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКОГО КОЭФФИЦИЕНТА ВНЕШНЕГО ТРЕНИЯ | 2010 |
|
RU2444000C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА ВНЕШНЕГО ТРЕНИЯ | 2011 |
|
RU2458336C1 |
| Способ изготовления нагревателей печей сопротивления | 1947 |
|
SU75041A1 |
| CN102944512 A 27.02.2013-02 | |||

