Изобретение относится к области механических испытаний материалов, в частности к определению динамического коэффициента трения при взаимном перемещении образцов.
Известны способы определения динамического коэффициента внешнего трения, состоящие в измерении силы трения на образцах при их взаимном перемещении. Недостатком таких способов является необходимость применения силоизмерительных механизмов, усложняющих применяемые устройства.
Существуют способы и устройства, позволяющие исключить измерение силы трения. Например, распространен способ определения статического коэффициента внешнего трения путем измерения угла наклона φ относительно горизонтальной плоскости двух образцов, расположенных один на другом, в момент начала скольжения одного образца относительно другого, с расчетом коэффициента m внешнего трения по формуле m=tgφ [патент США №3020744, кл. 73-9, кл. G01N 19/02, 1962]. Известен способ определения динамического коэффициента внешнего трения скольжения при наклоне двух образцов, нижний из которых, имеющий форму диска, приводят во вращение вокруг своей оси и постепенно наклоняют относительно горизонта, а верхний образец удерживают в том месте диска, где его линейная скорость направлена вверх по уклону, при этом коэффициент трения определяют, используя ту же формулу, по текущему значению угла наклона φ в тот момент, когда верхний образец начинает соскальзывать вниз [патент РФ №2458336, кл. G01N 19/02, опубл. 10.08.2012].
Недостатком рассмотренных способов определения коэффициента трения является погрешность определения угла трения, выполняемого при изменении угла наклона образцов. С одной стороны, вследствие инерционности системы, момент начала соскальзывания образца определяется с погрешностью. С другой стороны, результат эксперимента проявляется одномоментно, для набора статистических данных требуются приведение системы в исходное положение и повторение опытов.
Известен также выбранный в качестве прототипа способ определения динамического коэффициента внешнего трения между двумя расположенными друг на друге и совершающими относительное перемещение образцами, нижний из которых располагают с некоторым фиксированным в опыте углом наклона φ относительно горизонтального положения, а верхний образец подвешивают с помощью шарнирной связи и перемещают относительно нижнего по горизонтали до образования установившегося угла α между шарнирной связью и направлением перемещения, при этом динамический внешний коэффициент трения определяют по формуле 
Техническим результатом предлагаемого технического решения является возможность непрерывного и точного определения динамического коэффициента внешнего трения, а также оценки его вариации при изменении скорости относительного перемещения образцов, с измерением только геометрических параметров системы, без определения силы трения.
Технический результат достигается тем, что для определения динамического коэффициента внешнего трения используются два образца, расположенных друг на друге и имеющих возможность наклоняться относительно горизонта на некоторый угол φ, величина которого в ходе опыта остается неизменной. Нижний образец приводят во вращение вокруг оси, перпендикулярной его плоской рабочей поверхности, а центр опорной поверхности верхнего образца совмещают с одной из точек на поверхности нижнего, где скорость последнего направлена горизонтально, т.е. на линии наибольшего ската, проходящей через ось вращения. При этом верхний образец удерживают с помощью шарнирной связи, имеющей возможность свободного поворота в плоскости, параллельной поверхности нижнего образца. Для придания верхнему образцу необходимого положения регулируют положение точки подвески шарнирной связи или длину шарнирной связи. После достижения заданного стабильного положения образца определяют установившийся при этом угол α между шарнирной связью и проходящей через точку ее подвески горизонталью, после чего определяют динамический внешний коэффициент трения по формуле 
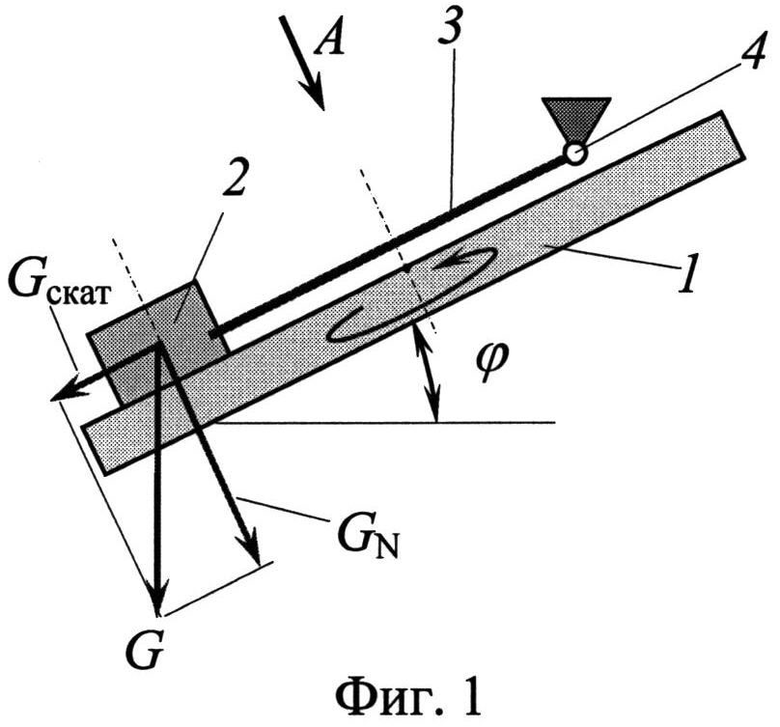
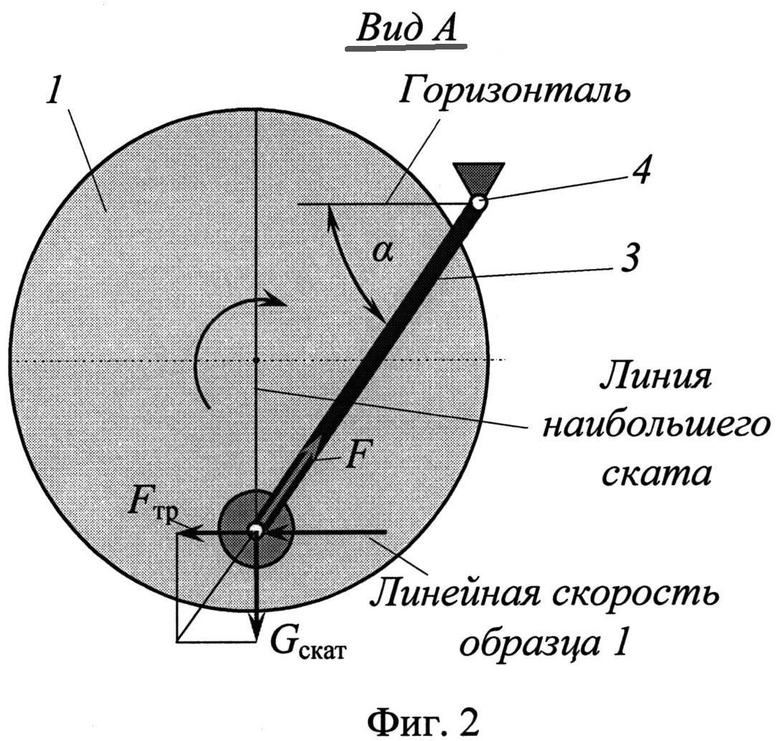
На фиг.1 показан пример исполнения устройства для реализации предлагаемого способа определения динамического коэффициента внешнего трения с двумя подвижными образцами, на фиг.2 показана схема движения образца и действующих при этом усилий в плоскости вращающегося образца, где: 1 - нижний образец; 2 - верхний образец; 3 - шарнирная связь; 4 - точка подвески шарнирной связи.
Нижний образец 1 наклоняют относительно горизонта с некоторым углом φ и приводят во вращение вокруг оси, перпендикулярной его плоской рабочей поверхности, в связи с чем предпочтительно изготовление нижнего образца 1 в форме диска. На рабочую поверхность нижнего образца 1 устанавливают верхний образец 2, который удерживают от вращения под воздействием нижнего образца 1 при помощи шарнирной связи 3. Шарнирная связь 3 имеет возможность свободного поворота относительно точки подвески 4 в плоскости, параллельной поверхности нижнего образца 1. Удерживаемый шарнирной связью 3 верхний образец 2 занимает на поверхности вращающегося нижнего образца 1 некоторое положение, при котором все действующие на верхний образец 2 силы уравновешиваются. Изменяя положение точки подвески 4 или длину шарнирной связи 3, приводят верхний образец 2 в такое положение, чтобы направленный через его центр массы вектор силы тяжести проходил через точку рабочей поверхности нижнего образца 1, в которой вектор линейной скорости направлен горизонтально. Такие точки расположены на линии наибольшего ската, проходящей через ось вращения нижнего образца 1. В случае правильной формы верхнего образца это условие обеспечивается при совмещении с линией наибольшего ската центра его опорной поверхности.
Определение динамического коэффициента внешнего трения по предлагаемому способу заключается в следующем. При достигнутом стабильном положении верхнего образца 2 шарнирная связь 3 принимает положение, определяемое некоторым углом α относительно горизонтали, проходящей через точку поворота шарнирной связи 4. Условием стабильного положения верхнего образца 2 является равновесие действующих на него сил. В плоскости, перпендикулярной вектору линейной скорости (фиг.1), сила тяжести G образца 2 может быть представлена как геометрическая сумма двух сил: силы нормального давления GN образца 2 на образец 1 и тангенциальной к поверхности нижнего образца 1 скатывающей силы Gφ. Обе составляющие зависят от угла наклона системы φ:
GN=G·cosφ
Gφ=G·sinφ.
Между образцами 1 и 2 возникает сила трения Fтр вследствие вращения нижнего образца 1, совпадающая с вектором его линейной скорости, направленным горизонтально. Сила трения Fтр пропорциональна силе нормального давления GN и динамическому коэффициенту трения m:
Fтр=GN·m=G·cosφ·m.
Из рассмотренной совокупности сил в плоскости рабочей поверхности на верхний образец 2 действуют сила трения Fтр и скатывающая сила Gφ, образующие геометрическим суммированием равнодействующую F. Равнодействующая F уравновешивается реакцией шарнирной связи 3. Вектор реакции шарнирной связи 3, в соответствии с законами механики, совпадает с ее направлением. Таким образом, условие равновесия имеет вид
На основании полученного условия равновесия системы определяется коэффициент трения между образцами 7 и 2 в зависимости от установившегося угла α наклона шарнирной связи 3 с учетом величины угла наклона φ образцов:
С точкой опоры шарнирной связи 3 совмещают начало координат угловой шкалы для отсчета угла α. Возможно применение как угловой, так и специальной шкалы, на которой вместо значений угла α проставлены соответствующие значения коэффициента трения m. Для этого в требуемой дискретности должен быть произведен предварительный пересчет угловых координат для ряда последовательных величин m в соответствии с формулой, полученной из предыдущего выражения
Естественно, что такая шкала применима только при конкретном значении угла наклона образцов φ, поэтому при перемене угла наклона используют сменные шкалы. Можно также использовать электронный датчик угла поворота α с логическим устройством для автоматического вычисления коэффициента трения m с учетом полученного значения α и установленной величины угла наклона φ, при этом обеспечивается непосредственная индикация величины коэффициента трения на цифровом табло.
При исследовании различных пар материалов, когда коэффициент трения измеряется в широких пределах, целесообразна оптимизация угла наклона платформы φ. Если наклон платформы не менять, при больших коэффициентах трения угол α может быть весьма малым, а при малых значениях коэффициента трения будет стремиться к 90°. В подобных экстремальных случаях погрешность определения коэффициента трения увеличивается. Погрешность опыта минимальна при углах α, близких к 45°, что, в соответствии с вышеприведенным выражением, при известном приближенном или предварительно определенном значении m легко обеспечивается выполнением условия
Достоинством предлагаемого способа экспериментального определения динамического коэффициента внешнего трения является фиксация искомого значения коэффициента трения в процессе проведения опыта, что позволяет наблюдение его в течение продолжительного времени, оценивая стабильность или пределы вариации. Изменяя частоту вращения нижнего образца, можно оценивать вариацию динамического коэффициента внешнего трения в широком диапазоне скоростей относительного перемещения образцов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЭКСПЕРИМЕНТАЛЬНОГО ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКОГО КОЭФФИЦИЕНТА ВНЕШНЕГО ТРЕНИЯ | 2010 |
|
RU2444000C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКОГО КОЭФФИЦИЕНТА ВНЕШНЕГО ТРЕНИЯ ОТНОСИТЕЛЬНО ВРАЩАЮЩЕЙСЯ СФЕРИЧЕСКОЙ ПОВЕРХНОСТИ | 2014 |
|
RU2565359C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СТАТИЧЕСКОГО И ДИНАМИЧЕСКОГО КОЭФФИЦИЕНТОВ ВНЕШНЕГО ТРЕНИЯ | 2013 |
|
RU2537745C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКОГО КОЭФФИЦИЕНТА ВНЕШНЕГО ТРЕНИЯ | 2015 |
|
RU2589955C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКОГО КОЭФФИЦИЕНТА ВНЕШНЕГО ТРЕНИЯ С УДЕРЖАНИЕМ ОБРАЗЦА НА НАКЛОННОЙ ПОВЕРХНОСТИ УПРУГИМ ЭЛЕМЕНТОМ | 2014 |
|
RU2563904C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА ТРЕНИЯ СКОЛЬЖЕНИЯ | 2021 |
|
RU2778049C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТОВ ТРЕНИЯ | 2021 |
|
RU2754204C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТОВ ТРЕНИЯ СКОЛЬЖЕНИЯ И ПОКОЯ | 2017 |
|
RU2672809C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА ТРЕНИЯ СКОЛЬЖЕНИЯ | 2017 |
|
RU2677110C1 |
| СТЕЛЬКА С АНТИФРЕТТИНГОВЫМИ СВОЙСТВАМИ | 2013 |
|
RU2546447C2 |
Изобретение относится к области механических испытаний материалов, в частности к определению динамического коэффициента трения при взаимном перемещении образцов. Сущность: нижний образец наклоняют относительно горизонта с некоторым углом φ, верхний образец устанавливают на рабочую поверхность нижнего, удерживают при помощи шарнирной связи, имеющей возможность свободного поворота относительно точки подвески в плоскости, параллельной поверхности нижнего образца, организуют относительное перемещение образцов в горизонтальном направлении, измеряют установившийся при этом угол α поворота шарнирной связи и определяют динамический внешний коэффициент трения по формуле
1. Способ определения динамического коэффициента внешнего трения между двумя расположенными друг на друге образцами, нижний из которых наклоняют относительно горизонта с некоторым углом φ, верхний образец устанавливают на рабочую поверхность нижнего, удерживают при помощи шарнирной связи, имеющей возможность свободного поворота относительно точки подвески в плоскости, параллельной поверхности нижнего образца, организуют относительное перемещение образцов в горизонтальном направлении, измеряют установившийся при этом угол α поворота шарнирной связи и определяют динамический внешний коэффициент трения по формуле
2. Способ по п.1, отличающийся тем, что нижний образец выполнен в виде диска.
| СПОСОБ ЭКСПЕРИМЕНТАЛЬНОГО ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКОГО КОЭФФИЦИЕНТА ВНЕШНЕГО ТРЕНИЯ | 2010 |
|
RU2444000C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА ВНЕШНЕГО ТРЕНИЯ | 2011 |
|
RU2458336C1 |
| Устройство для определения коэффициента трения плоских образцов материала | 1990 |
|
SU1718050A1 |
| JP 2007127551 A 24.05.2007 | |||

