1. Область техники.
Изобретение относится к области подповерхностной радиолокации, а именно к способам определения расположения и формы неоднородностей и включений в конденсированных средах.
2. Уровень техники.
Известен способ подповерхностного зондирования (Финкельштейн М.И., Кутев В.А., Золотарев В.П. Применение радиолокационного подповерхностного зондирования в инженерной геологии. М.: Недра, 1986, с.46). Он основано на использовании непрерывного сигнала с изменением частоты по симметричному или несимметричному пилообразному закону. Частота биений между опорным /прямым/ и отраженным сигналами является функцией расстояния до объекта.
Известен также способ зондирования конденсированных сред (Journal of Applied Physics, v.56, №9, 1984, p.2575) со ступенчатым изменением частоты в заданном диапазоне. Недостатком аналогов является невозможность определения глубины залегания объекта и его геометрических размеров.
Наиболее близким аналогом (прототипом) является способ зондирования конденсированных сред (заявка на изобретение RU 2000103678, G01V 3/12, G01N 22/00, от 17.02.2000) со ступенчатым изменением сигнала в заданном диапазоне частот при этом частоты зондирующего сигнала выбираются с равномерным шагом в диапазоне
от 
до 
где:
kmin=0,72;
kmax=0,81;
D - диаметр антенны;
с - скорость света, при этом количество отдельных частот в диапазоне от fmin до fmax должно быть не менее пяти. Недостатком прототипа является невозможность определения глубины залегания объекта и его геометрических размеров.
3. Сущность изобретения.
3.1. Задача.
Техническая задача состоит в устранении указанного недостатка за счет сканирования исследуемого участка поверхности, фокусировки радиоголограммы исследуемого объекта и определения ориентации проводящего заглубленного цилиндра, при этом сначала антенна ориентируется по отношению к оси цилиндра так, что вектор напряженности электрического поля, излучаемого антенной, располагается перпендикулярно оси заглубленного цилиндра и сканируется поверхность при перпендикулярной поляризации, антенна ориентируется по отношению к оси цилиндра так, что вектор напряженности электрического поля располагается параллельно оси цилиндра и сканируется поверхность при параллельной поляризации, в заключение производится фокусировка радиоголограмм цилиндра при перпендикулярной и параллельной поляризации и определяется глубина фокусировки изображений заглубленного цилиндра при перпендикулярной и параллельной поляризациях.
3.2. Отличительные признаки.
В отличие от известного способа, включающего в себя ступенчатое изменение сигнала в заданном диапазоне частот с равномерным шагом в диапазоне
от 
до 
где:
kmin=0,72;
kmax=0,81;
D - диаметр антенны;
с - скорость света, количество отдельных частот в диапазоне от fmin до fmax не меньше пяти, дополнительно фокусируется радиоголограмма исследуемого участка и определяется ориентация проводящего заглубленного цилиндра, при этом сначала антенна ориентируется по отношению к оси заглубленного цилиндра так, что вектор напряженности электрического поля располагается перпендикулярно оси цилиндра, сканируется поверхность при перпендикулярной поляризации, затем антенна ориентируется по отношению к оси цилиндра так, что вектор напряженности электрического поля располагается параллельно оси заглубленного цилиндра, сканируется поверхность при параллельной поляризации, в заключение производится фокусировка радиоголограмм цилиндра при перпендикулярной и параллельной поляризациях, определяется глубина фокусировки изображений заглубленного цилиндра при перпендикулярной поляризации и параллельной поляризации, радиус заглубленного цилиндра и глубина заложения находится из выражений:
r=l⊥-l||;
h=l⊥,
где r - радиус заглубленного цилиндра, h - глубина заложения, l⊥ - глубина фокусировки изображений заглубленного цилиндра при перпендикулярной поляризации, l|| - глубина фокусировки изображений заглубленного цилиндра при параллельной поляризации
3.3. Сущность способа.
Сущность способа состоит в том, что определяется глубина фокусировки изображений заглубленного цилиндра при перпендикулярной поляризации и параллельной поляризации, радиус заглубленного цилиндра и глубина заложения находится из выражений:
r=l⊥-l||;
h=l⊥,
где r - радиус заглубленного цилиндра, h - глубина заложения, l⊥ - глубина фокусировки изображений заглубленного цилиндра при перпендикулярной поляризации, l|| - глубина фокусировки изображений заглубленного цилиндра при параллельной поляризации
4. Перечень фигур, чертежей и иных материалов.
Фиг.1. Антенный блок радиоголографического локатора RASKAN (1 - передатчик; 2 - приемник; 3 - антенна; 4 - цилиндрический объект).
Фиг.2. График зависимости фазы отраженного сигнала от расстояния между антенной и осью цилиндра при перпендикулярной поляризации зондирующего сигнала.
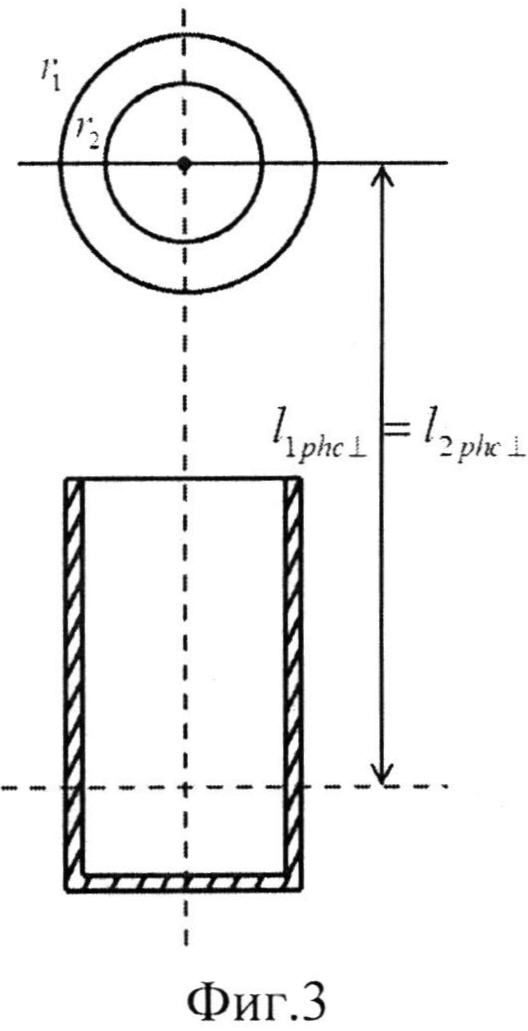
Фиг.3. Положение фазовых центров при перпендикулярной поляризации зондирующего сигнала.
Фиг.4. График зависимости фазы отраженного сигнала от расстояния между антенной и осью цилиндра при параллельной поляризации зондирующего сигнала.
Фиг.5. Положение фазовых центров при параллельной поляризации зондирующего сигнала.
Фиг.6. Положения фазовых центров для арматуры диаметром 36 мм.
Фиг.7. Результаты сканирования цилиндрического образца диаметром 28 мм (среда - воздух).
Фиг.8. Результаты измерений для образцов арматуры в воздухе.
Фиг.9. Результаты измерений для арматуры, помещенной в бетон.
5. Сведения, подтверждающие возможность осуществления изобретения.
Экспериментальные исследования проводились в два этапа. На первом этапе исследований в воздушной среде использовались стандартная антенна локатора RASCAN и векторный анализатор цепей. Эксперименты проводились на нескольких образцах арматуры разных диаметров. Измерения проводились векторным анализатором цепей «Vector Network Analyzer R&S ZVA24 1145.1110.26» фирмы Rohde&Schwarz с диапазоном частот от 10 МГц до 24 ГГц. В качестве излучающей антенны использовался полуоткрытый волновой резонатор. На фиг.1 представлено схематическое изображение антенного блока радиоголографического локатора RASCAN.
Выход передатчика анализатора подключен к излучающему электроду передатчика 1, а вход приемника 2 подключен к диагностическому электроду 2. Оба электрода изолированы от корпуса антенны 3 и расположены на расстоянии l2 от проводящего донышка излучателя и на расстоянии l2 от объекта. Изменение поляризации падающей волны достигается поворотом цилиндрического объекта 4 на 90° относительно оси антенны.
С учетом обозначений, принятых на фиг.1, можно определить величину принимаемого приемником сигнала. Если пренебречь емкостной связью между электродами излучателя, то принимаемый сигнал можно рассматривать как суперпозицию волн, отраженных от объекта и проводящего донышка излучателя. При малом значении модуля коэффициента отражения от объекта (порядка 0,1) будем считать вклад второго отражения от объекта малым. Считаем, что коэффициент отражения от донышка равен единице по модулю и имеет фазу минус π. Комплексный коэффициент отражения волны от объекта Г будем считать по модулю меньше единицы и с некоторой фазой φ. Для настроенного резонатора примем l2=λ/4, где λ длина волны в резонаторе.
С учетом того, что

получим сигнал в приемнике Unp:

При резонансе показатель степени экспоненты в выражении (8) равен нулю или кратен 2 π. Обозначим расстояние l1, соответствующее резонансному значению принимаемого сигнала, как lphc=(2πn-φ)/2k.
Изменение значения фазы отраженного сигнала при этом может быть измерено по изменению расстояния lphc. Таким образом, расстояние lphc характеризует положение усредненного фазового центра рассеиваемого сигнала.
Определение положения резонанса осуществлялось экспериментально путем перемещения облучаемого предмета при неподвижной антенне до получения максимального сигнала в приемнике. Были проведены резонансные исследования для образцов арматуры диаметром 36, 24, 12, 10 мм. Частота передатчика 1 изменялась от 2,8 до 3,8 ГГц с шагом 0,2 ГГц. Облучение объекта проводилось при параллельной и перпендикулярной поляризациях падающей волны. Из измерений следовало, что при параллельной поляризации положение фазового центра определяется минимальным расстоянием до объекта, а при перпендикулярной поляризации - положением оси облучаемого цилиндра.
Тогда разность положений фазовых центров равна радиусу облучаемого цилиндра:

На фиг.2 и фиг.4 представлена теоретическая зависимость фазы отраженного сигнала от расстояния между антенной и осью цилиндра при двух ортогональных поляризациях для цилиндров разного радиуса. Соответствующее расположение цилиндров и положение фазовых центров рассеяния показано на фиг.3 и фиг.5.
Как видно из графиков, при перпендикулярной поляризации для цилиндров различных диаметров значение фазы отраженного сигнала практически совпадает и определяется положением оси цилиндра. Для параллельной поляризации положения резонансов для цилиндров разных радиусов отличаются на величину, пропорциональную разности радиусов.
Графики экспериментальных зависимостей положения фазовых центров от частоты падающей волны при двух ее ортогональных поляризациях для арматуры диаметром 36 мм представлены на фиг.6.
После усреднения по всем частотам получаем, что rэксп=21,83±1,83 мм при истинном значении r=18 мм.
На втором этапе экспериментальные исследования проводились с помощью радиоголографического локатора RASCAN в полосе частот 6,4-6,8 ГГц для образцов арматуры в воздухе и в бетоне. Полученные в результате сканирования радиоголограммы обрабатывались стандартным пакетом обработки локатора RASCAN, основанным на разложении функции апертуры по плоским волнам и обратном преобразовании Фурье.
Фокусировка изображения в радиолокаторе RASCAN осуществляется по критерию максимальной яркости. И при смещении положения фазового центра при изменении поляризации изображение фокусируется на разной глубине.
Результаты эксперимента для образца арматуры диаметром 28 мм представлены на фиг.7. Данные получены для параллельной и перпендикулярной поляризации падающей волны в воздухе.
При параллельной поляризации фокусировка производилась на глубину l||=49 мм. При перпендикулярной поляризации фокусировка производилась на глубину l⊥=62 мм, таким образом, получаем радиус арматуры rэксп=l⊥- l||=13 мм, при истинном значении r=14 мм.
Аналогично получим радиусы для других образцов арматуры (фиг.8).
Аналогичные эксперименты были проведены с арматурой, помещенной в бетон, диэлектрическая проницаемость бетона была принятой ε=3.
Полученные после обработки данных результаты приведены на фиг.9.
Полученные результаты позволяют косвенным методом определить диаметр арматуры по разности глубины фокусировки изображений при двух ортогональных поляризациях зондирующей волны.
Анализ, проведенный заявителем по известному ему уровню техники, показал, что предлагаемое изобретение, обладающее новизной и промышленной применимостью, отвечает в отношении совокупности его существенных признаков требованию критерия «изобретательский уровень», из уровня техники не известен также механизм достижения технического результата, раскрытого в материалах заявки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ восстановления радиоголограмм подповерхностных объектов, находящихся в средах с неровной поверхностью | 2018 |
|
RU2701880C1 |
| СПОСОБ ПОЛУЧЕНИЯ РАДИОГОЛОГРАММ ПОДПОВЕРХНОСТНЫХ ОБЪЕКТОВ | 2011 |
|
RU2482518C1 |
| СПОСОБ ДЕФЕКТОСКОПИИ ТЕПЛОЗАЩИТНЫХ И ТЕПЛОИЗОЛЯЦИОННЫХ ПОКРЫТИЙ ИЗДЕЛИЙ | 2013 |
|
RU2532414C1 |
| УСТРОЙСТВО ЗОНДИРОВАНИЯ КОНДЕНСИРОВАННЫХ СРЕД | 2011 |
|
RU2460099C1 |
| Способ получения радиолокационного изображения и геометрии поверхности рельсового полотна | 2018 |
|
RU2683120C1 |
| СПОСОБ ДОСМОТРА СКРЫТЫХ ПРЕДМЕТОВ ПОД ОДЕЖДОЙ И В ПЕРЕНОСИМОМ БАГАЖЕ ЧЕЛОВЕКА, ПЕРЕДВИГАЮЩЕГОСЯ ЕСТЕСТВЕННО | 2014 |
|
RU2564693C1 |
| ОПТИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ЖЕЛЕЗНОДОРОЖНОГО СОСТАВА | 2013 |
|
RU2518078C1 |
| ПОДПОВЕРХНОСТНЫЙ ЛОКАТОР | 1998 |
|
RU2158015C2 |
| СПОСОБ ОПТИЧЕСКОГО ОПРЕДЕЛЕНИЯ НЕРОВНОСТЕЙ И ДЕФЕКТОВ РЕЛЬСОВОГО ПУТИ | 2012 |
|
RU2489291C1 |
| УСТРОЙСТВО ЗОНДИРОВАНИЯ СТРОИТЕЛЬНЫХ КОНСТРУКЦИЙ | 1997 |
|
RU2121671C1 |







Изобретение относится к области подповерхностной радиолокации, а именно к определению расположения и формы неоднородностей и включений в конденсированных средах. Сущность: способ заключается в ступенчатом изменение сигнала, в заданном диапазоне частот с равномерным шагом от

Способ получения радиоголограмм подповерхностных проводящих объектов цилиндрической формы, включающий в себя ступенчатое изменение сигнала в заданном диапазоне частот с равномерным шагом:
от
до
где:
kmin=0,72;
kmax=0,81;
D - диаметр антенны;
с - скорость света, количество отдельных частот в диапазоне от fmin до fmax не менее пяти, отличающийся тем, что сканируется исследуемый участок поверхности, радиоголограмма исследуемого участка фокусируется и определяется ориентация проводящего заглубленного цилиндра, сначала антенна ориентируется по отношению к оси заглубленного цилиндра так, что вектор напряженности электрического поля располагается перпендикулярно оси цилиндра, сканируется поверхность при перпендикулярной поляризации, затем антенна ориентируется по отношению к оси цилиндра так, что вектор напряженности электрического поля располагается параллельно оси заглубленного цилиндра, и сканируется поверхность при параллельной поляризации, производится фокусировка радиоголограмм цилиндра при перпендикулярной и параллельной поляризациях, определяется глубина фокусировки изображений заглубленного цилиндра при перпендикулярной и параллельной поляризациях, радиус заглубленного цилиндра и глубина заложения находятся из выражений:
r=l⊥-l||;
h=l⊥,
где r - радиус заглубленного цилиндра, h - глубина заложения, l⊥ - глубина фокусировки изображений заглубленного цилиндра при перпендикулярной поляризации, l|| - глубина фокусировки изображений заглубленного цилиндра при параллельной поляризации.
| СПОСОБ ПОЛУЧЕНИЯ РАДИОГОЛОГРАММ ПОДПОВЕРХНОСТНЫХ ОБЪЕКТОВ | 2011 |
|
RU2482518C1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ РАДИОГОЛОГРАММ | 1989 |
|
SU1626929A1 |
| RU 2000103678 A, 10.01.2002 | |||
| US 7675289 B1, 09.03.2010 | |||
| WO 1994027168 A1, 24.11.1994 | |||
| US 8253619 B2, 28.08.2012 | |||
| US 5896102, 20.04.1999 | |||

