1. Область техники
Изобретение относится к железнодорожному транспорту, а именно к способам определения скорости железнодорожного состава.
2. Уровень техники
Известен способ определения скорости железнодорожного подвижного состава (Т.Х.Mei, Н.Li, "Monitoring train speed using bogie mounted sensors - Accuracy and robustness", 4th IET International Conference on Railway Condition Monitoring, 18-20 June 2008, pp.1-6), основанный на определении сдвига сигналов, зарегистрированными двумя разнесенными на фиксированное расстояние инерционными датчиками (акселерометрами).
Известен также способ измерения скорости на локомотивах использованием колесных датчиков пути и скорости (ДПС) (Зорин В.И. Современные системы обеспечения безопасности // Железные дороги мира. 2000. №11. С 52-54). Недостатком данного способа измерения скорости является невысокая точность, на которую оказывают влияние проскальзование, пробуксовка и износ колес локомотива.
Наиболее близким аналогом (прототипом) является способ измерения линейной скорости локомотива (патент RU 2189599, 2001 г.), основанный на использовании двух идеентичных регистраторов, установленных под днищем локомотива со смещением относительно друг друга и непрерывно измеряющими информативный параметр, характеризующий одно из периодически изменяющихся вдоль пути свойств элементов конструкции железнодорожного полотна. Недостатком данного способа является то, что зависимость измерения информативного параметра от внешних условий (периодически изменяющихся вдоль пути свойств элементов конструкции железнодорожного пути), что ввлияет на точность определения скорости.
3. Перечень фигур, чертежей и иных материалов
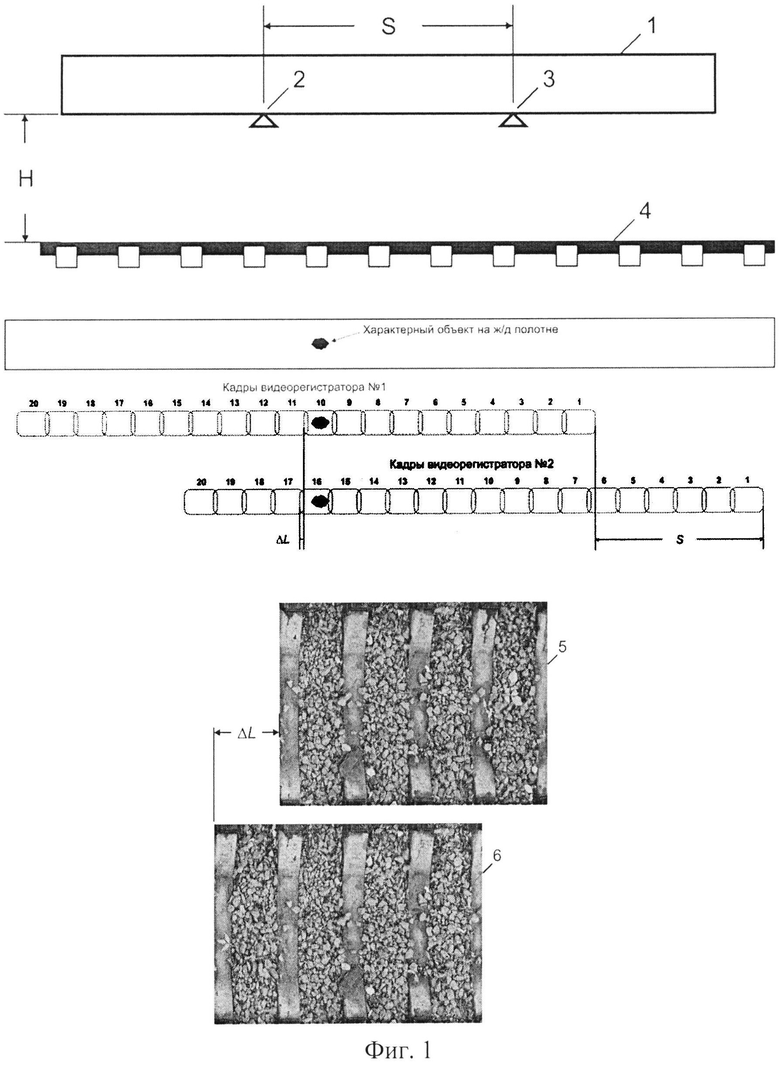
На фиг.1 показана схема расположения видиорегистраторов, где: 1 - подвижное основание; 2 - первый видеорегистратор; 3 - второй видеорегистратор; 4 - железнодорожный путь; 5 - кадр с первого видеорегистратора; 6 - кадр с тем же фрагментом железнодорожного пути со второго видеорегистратора.
Фиг.2. Место проведения экспериментов на полигоне в г. Щербинка.
Фиг.3. Съемка ж/д пути с автомотрисы АДМ.
Фиг.4. Истинная скорость поезда.
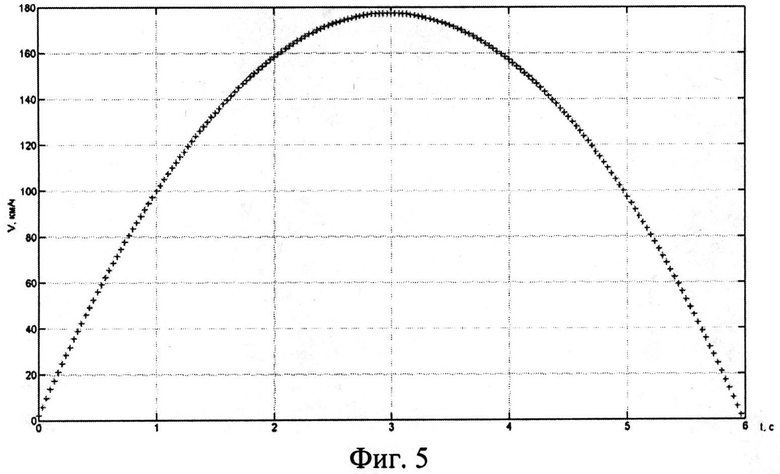
Фиг.5. Измеренная скорость поезда.
4. Сущность изобретения
4.1. Задача
Техническая задача состоит в устранении указанного недостатка, за счет фиксации в видимом диапазоне спектра электромагнитного излучения всей полосы железнодорожного пути расположенными на фиксированном расстоянии друг от друга и на заданной высоте от железнодорожного пути видеорегистраторами, производящими съемку железнодорожного полотна синхронно.
4.2. Отличительные признаки
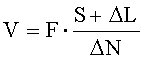
Технический результат достигается тем, что в отличие от известного способа, основанного на использовании двух идентичных регистраторов, установленных под днищем локомотива со смещением S относительно друг друга вдоль направления его движения и непрерывно измеряющих информативный параметр, регистраторы, представляющие собой два расположенные на заданной высоте от железнодорожного полотна видеорегистратора, производят съемку железнодорожного полотна синхронно, в каждый момент времени запоминается текущий кадр с первого видеорегистратора, определяется кадр с тем же фрагментом железнодорожного полотна в видеопоследовательности со второго видеорегистратора, вычисляется сдвиг между этими кадрами, и по разнице порядковых номеров кадров и сдвигу между ними определяется скорость по формуле

где
F - темп съемки видеорегистраторов (количество кадров в секунду),
S - смещение между видеорегистраторами,
ΔL - сдвиг между кадрами с одинаковым фрагментом железнодорожного полотна с двух видеорегистраторов,
ΔN - разность номеров кадров с одинаковым фрагментом железнодорожного полотна со второго и первого видеорегистраторов.
4.3. Сущность способа
Сущность оптического способа определения скорости железнодорожного состава показана на фиг.1: на подвижном основании 1 расположен видеорегистратор №1 - 2 и на расстоянии S от него видеорегистратор №2 - 3, находящиеся на высоте Н от железнодорожного пути 4, производящие съемку железнодорожного пути синхронно. В каждый момент времени запоминается текущий кадр 5 (по ходу движения) видиорегистратора №1 и сравнивать его с кадром 6, поступающими со второго видиорегистратора №2, с целью выбора кадра с одинаковым фрагментом железнодорожного пути 4. После нахождения кадра с одинаковым фрагментом железнодорожного пути 4 вычисляется сдвиг между кадрами. Зная характеристики камер, расстояние между ними, расстояние от камер до ж/д полотна, разницу порядковых номеров одинаковых кадров и сдвиг между одинаковыми кадрами, можно вычислить скорость.
5. Сведения, подтверждающие возможность осуществления изобретении
Для создания систем управления движением поездов и обеспечения безопасности железнодорожного движения конструкторам необходимо с высокой точностью знать скорость локомотива и его текущие координаты. Причем требования к этим параметрам повышаются год от года. Высокая точность измерений позволяет также правильно рассчитать величину тормозного пути, длина которого зависит от квадрата скорости. А точность порядка 2-3 м при определении текущей координаты или пройденного пути, отсчитываемого от какой-то реперной точки, особенно важна в условиях следования поезда в границах станции, в том числе при его остановке на ограниченном участке.
В настоящее время на локомотивах для измерения скорости и пройденного пути в основном устанавливают колесные датчики пути и скорости (ДПС). Их крепят на оси колес локомотива, одному повороту колеса при этом соответствует определенное количество импульсов в выходной шине датчика. Поскольку колесо соприкасается с рельсом, то непредсказуемое влияние на точность показаний датчиков оказывают такие факторы, как проскальзывание и пробуксовывание колес локомотива. Влияют на качество измерений и ошибки в определении диаметра бандажа (соприкасающейся с рельсом рабочей части колеса) вследствие его уменьшения по причине износа в процессе эксплуатации и т.д. Кроме того, эксплуатационный ресурс ДПС довольно ограничен из-за наличия в них механических вращающихся деталей. В результате всех указанных недостатков сегодня при использовании таких датчиков погрешность составляет до 50-70 м на километр пути, что не удовлетворяет требованиям по точности.
Системы навигации ГЛОНАСС/GPS тоже имеют целый ряд недостатков. Погрешности измерений, проводимых с их помощью, зависят от многих факторов. Среди них - влияние ионосферы Земли, очень большая облачность, многократное переотражение сигналов от окружающих предметов и поверхностей, геометрия расположения спутников и даже преднамеренное ухудшение точности при использовании системы GPS и т.д. Нормальному приему сигналов спутниковых систем могут повредить помехи от многих наземных радиоисточников, а также от магнитных бурь. Кроме того, на практике часто получается так, что спутниковые сигналы могут просто исчезать по причине возникновения экранирования приемника в процессе движения. Погрешности в определении координат пользователя с помощью данных средств навигации на подвижных объектах могут достигать 15 м и больше. Повышает точность измерений так называемый двухчастотный способ с использованием довольно дорогих приемников. Он позволяет ослабить влияние ионосферы на погрешности определения параметров движения поезда. Еще один существующий способ - применение так называемого дифференциального режима, предполагающего строительство в районах прохождения железнодорожных линий дорогостоящих соответствующих станций, которые сейчас в нашей стране практически отсутствуют.
В последнее время на железнодорожном подвижном составе все больше утверждаются радарные технологии, основанные на доплеровском эффекте, для бесконтактного измерения скорости и пройденного пути. Излучаемые радаром волны отражаются от движущегося объекта со смещением частоты и попадают в приемник. Получаемая при этом разностная частота определяет скорость движения объекта. Интегрируя выражения для скорости, получают пройденный путь. Один период доплеровских колебаний с частотой 24,125 ГГц и углом излучения 35 градусов соответствует прохождению отрезка пути длиной 8 мм. Суммируя число колебаний (аналогично суммированию импульсов колесного датчика), получают величину пройденного пути. По сравнению со звуковыми и световыми волнами колебания микроволнового диапазона наиболее удобны для измерения скорости и пути, пройденного поездом.
Специфические особенности радарной технологии менее известны. На 95% протяженности железнодорожных линий, где она внедрена, скорость и пройденный путь измеряются с высокой точностью и надежностью (погрешность менее 0,5%). При этом на результаты измерения не воздействуют процессы юза, буксования и виляния колесных пар, а также износ колес. В то же время на остальных 5% протяженности линий в силу ряда причин, обусловленных физикой процесса измерений, погрешность последних может возрастать до 1%. При особо неблагоприятных условиях может происходить дальнейшее снижение точности вплоть до полного исчезновения сигнала. В связи с этим радарные системы должны иметь резерв, например в виде колесного датчика.
Оптический способ измерения скорости локомотива, представленный на фиг.1, использует два расположенных по ходу движения локомотива на его корпусе 1 видеорегистратора №1-2 и видеорегистратор №2-3. При движении локомотива видеорегистраторами производится непрерывная съемка железнодорожного полотна 4. Полученные видеоизображения поступают в вычислитель системы. По сигналам первого по ходу видеорегистратора №1 в вычислителе формируется «портрет» проносящейся под локомотивом подстилающей поверхности. Такой же «портрет», но со сдвигом во времени, формируется по сигналу видеорегистратора №2. Затем в вычислителе с использованием специальных алгоритмов с высокой точностью определяется временной сдвиг между обоими «портретами». По измеренному временному сдвигу, с учетом известного расстояния S между видеорегистратором №1 и видеорегистратором №2, рассчитывается скорость движения.
Предположим, что максимальная скорость, которую требуется измерять предлагаемым способом, составляет V=200 км/ч=55,56 м/с. Пусть видеорегистратор выдает FPS=30 кадров/с. При максимальной скорости, за временной интервал между соседними кадрами поезд смещается на расстояние L=VIFPS=1.85 м. Следовательно, для съемки без пропусков в кадр должен попадать фрагмент ж/д пути длиной не менее чем fW=1.85 м. Обычно соотношение сторон кадров, получаемых видеорегистраторами, составляет 1.333. Будем располагать видеорегистратор широкой стороной кадра вдоль ж/д путей. Размер фрагмента, попадающего в кадр видеорегистратора, зависит от ее угла зрения (который однозначно связан с фокусным расстоянием видеорегистратора) и от расстояния до объекта:
fW=2*H*tg(FOV/2).
В таблице приведены рассчитанные значения угла зрения FOV и фокусного расстояния F (рассчитанного на кадр 24×36 мм) видеорегистратора для различных высот H его установки.
Диаметр колеса ж/д вагона равен 1050 мм, поэтому считаем оптимальным закреплять видеорегистраторы с фокусным расстоянием 20 мм на тележках вагона на высоте порядка 1 м. Необходимо использовать видеорегистратор с большим фокусным расстоянием, т.к. чем больше фокусное расстояние, тем меньше дисторсия (аберрация оптических систем, при которой линейное увеличение изменяется по полю зрения, при этом нарушается подобие между объектом и его изображением).
На фиг.1 приведено изображение ж/д полотна с неким характерным объектом, расположенным на железнодорожном полотне. Также приведены кадр 5 с видеорегистратора 2 и аналогичный кадр 6 с видеорегистратора 3. Кадры с одинаковыми номерами получены синхронно.
Видно, что характерный объект попал на 10-й кадр с видеорегистратора №1 (N1=10) и на 16-й кадр с видеорегистратора №2 (N2=10). Также видно, что из этих двух кадров кадр с видеорегистратора №2 опережает кадр с видеорегистратора №1 на расстояние L. За время, прошедшее между 16-м и 10-м кадрами, поезд прошел расстояние S+L. Исходя из этого, получаем выражение для его скорости:
V=FPS*(S+L)/(N2-N1).
Кадр с видеорегистратора №2 может как опережать кадр с видеорегистратора №1, так и отставать от него. В случае опережения на кадре с видеорегистратора №2 нужно искать фрагмент, совпадающий с левой половиной кадра с видеорегистратора №1, в случае отставания нужно искать фрагмент, совпадающий с правой половиной.
Принимая во внимание все вышесказанное, скорость движения железнодорожного состава определяется по следующму алгоритму. Имеется два идентичных видеорегистратора, получающие FPS кадров в секунду каждый. Видеорегистраторы установлены широкой стороной кадра вдоль направления движения поезда. Длина фрагмента ж/д пути (вдоль направления движения), попадающего в кадр, равна fW. Видеорегистраторы разнесены на расстояние S такое, что fW/2<S<fW. Видеорегистраторы снимают синхронно, кадр с номером N1=i (с видеорегистратора №1) и кадр N2=i (с видеорегистратора №2) получены в один и тот же момент времени. Для каждого момента времени (кадра i):
1) Вычленяем левую половину (ЛП) кадра N1=i с видеорегистратора №1.
2) Ищем степень «похожести» (C1) между ЛП и следующим кадром с видеорегистратора №1 (N1=i+1), а также сдвиг кадров L1.
3) Ищем степень «похожести» (С2) между ЛП и следующим кадром с видеорегистратора №2 (N2=i+1), а также сдвиг кадров L2.
4) Вычленяем правую половину (ПП) кадра N1=i с видеорегистратора №1.
5) Ищем степень «похожести» (C3) между ПП и следующим кадром с видеорегистратора №2 (N2=i+1), а также сдвиг кадров L3.
6) Среди значений C1, С2, C3 и выбираем максимальное.
7) Вычисляем скорость:
- если максимально C1, то V=FPS*L1;
- если максимально C2, то V=FPS*(S+L2);
- если максимально C3, то V=FPS*(S-L3).
Осталось решить задачу определения степени «похожести» кадров и сдвига между ними. Для этого будем использовать корреляционную функцию изображений, запечатленных на двух разных кадрах. Корреляция (корреляционная функция) двух изображений f(x, y) и h(x, y) определяется следующим выражением:

где f - функция, комплексно сопряженная функции f, M и N - размеры изображений. В случае, если изображения имеют разные размеры, необходимо расширить области их определения (дополнить нулями до необходимого размера). Если нужно определить содержит ли изображение f(x, y) конкретную область, то формируется изображение h(x, y) этой области (обычно это изображение называется эталоном) и вычисляется корреляционная функция изображения и эталона. Тогда, если данное изображение содержит область, совмещаемую с эталоном, то корреляция двух функций будет иметь максимум, расположенный там где обнаружено соответствие между эталоном h и изображением f. В нашем случае эталоном является левая или правая половины кадра с видеорегистратора №1, а изображением - целый следующий кадр с видеорегистратора №1 или видеорегистратора №2.
Оценка достигаемой точности определения скорости осуществлялась с помощью моделирования с использованием изображения реального железнодорожного полотна на железнодорожном кольце ВНИИЖТ в подмосковной Щербинке (фиг.2). Съемка проводилась с высоты порядка 10 метров с монтажной автомотрисы АДМ зеркальной фотокамерой Canon 40D с установленным объективом Canon EF-S 17-55 f/2.8 IS USM (фиг.3).
Полученные фотографии фрагмента ж/д пути длиной около 200 м были сшиты в единое изображение шириной 3 м. Это изображение в пакете для создания и редактирования трехмерной графики и анимации Autodesk 3ds Мах использовалось в качестве карты диффузных отражений для прямоугольного параллелепипеда, моделирующего ж/д пути. Два видеорегистратора с фокусными расстояниями 20 мм были размещены на высоте 1 м над железнодорожным полотном. Разрешение видеорегистраторов (размер кадра) составляло 800×600 пикселей. Видеопоследовательность с каждого видеорегистратора состояла из 181-го кадра и имела длительность 6 секунд.
За время моделирования (6 секунд) поезд перемещался на расстояние 196.9 метров, соответственно, средняя скорость составляла 32.8 м/с или 118.1 км/ч. Но скорость поезда была неравномерной, моделировался разгон поезда после остановки и далее торможение также до полной остановки. При этом максимальная скорость составляла 49.2 м/с или 177.1 км/ч. Зависимость скорости поезда от времени приведена на фиг.4.
На фиг.5 показаны измеренные значения скорости в каждый момент времени. Интервал между отсчетами - 1/30 секунды. В реальных условиях движения железнодорожного состава интервал может быть порядка секунды. В качестве дополнительной возможности внутри секундного интервала можно проводить несколько измерений и усреднять их для повышения точности.
Если совместить графики, приведенные на фиг.4 и фиг.5, будет видно, что измеренные отсчеты хорошо ложатся на кривую истинной скорости. В таблице приведены значения полученных ошибок.
Как видно изполученных результатов, предложенный метод обладает хорошей точностью. Максимальное абсолютное значение ошибки измерения скорости составляет 115 м/ч, и во всем диапазоне скоростей от 0 до 176.9 км/ч ошибка не превышает 1%. Необходимо заметить, что ошибка измерения скорости вызвана ошибкой измерения сдвига между кадрами. При моделировании кадр был выбран размером 800×600 пикселей. Если увеличить размер до 1600×1200 пикселей, ошибка будет меньше в два раза.
Предложенный способ позволяет с высокой точностью измерять скорость движения железнодорожных составов. При правильной установке видеорегистраторов и предварительной калибровке системы погрешность измерения скорости не превышает нескольких сотен метров в час, соответственно, точность метода на порядок превосходит точность, достигаемую с помощью колесных датчиков. По сравнению с системами навигации ГЛОНАСС/GPS, достоинства предлагаемой системы заключаются в ее замкнутости (не требуются внешние устройства) и, соответственно, более высокой надежности (не может быть проблем с пропаданием сигнала).
Анализ, проведенный заявителем по известному ему уровню техники, показал, что предлагаемое изобретение, обладающее новизной и промышленной применимостью, отвечает в отношении совокупности его существенных признаков требованию критерия «изобретательский уровень». Из уровня техники неизвестен также механизм достижения технического результата, раскрытого в материалах заявки.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПТИЧЕСКОГО ОПРЕДЕЛЕНИЯ НЕРОВНОСТЕЙ И ДЕФЕКТОВ РЕЛЬСОВОГО ПУТИ | 2012 |
|
RU2489291C1 |
| СПОСОБ ДОСМОТРА СКРЫТЫХ ПРЕДМЕТОВ ПОД ОДЕЖДОЙ И В ПЕРЕНОСИМОМ БАГАЖЕ ЧЕЛОВЕКА, ПЕРЕДВИГАЮЩЕГОСЯ ЕСТЕСТВЕННО | 2014 |
|
RU2564693C1 |
| Способ восстановления радиоголограмм подповерхностных объектов, находящихся в средах с неровной поверхностью | 2018 |
|
RU2701880C1 |
| Способ увеличения эффективного времени накопления сигнала в системах досмотра, формирующих изображение скрытых предметов | 2015 |
|
RU2615516C1 |
| СПОСОБ ПОЛУЧЕНИЯ РАДИОГОЛОГРАММ ПОДПОВЕРХНОСТНЫХ ПРОВОДЯЩИХ ОБЪЕКТОВ ЦИЛИНДРИЧЕСКОЙ ФОРМЫ | 2014 |
|
RU2564454C1 |
| СПОСОБ ПОЛУЧЕНИЯ РАДИОГОЛОГРАММ ПОДПОВЕРХНОСТНЫХ ОБЪЕКТОВ | 2011 |
|
RU2482518C1 |
| Способ получения радиолокационного изображения и геометрии поверхности рельсового полотна | 2018 |
|
RU2683120C1 |
| СПОСОБ ПУТЕВОЙ НАВИГАЦИИ И ИЗМЕРЕНИЯ СКОРОСТИ ЛОКОМОТИВА ПО ГЕОМЕТРИИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2017 |
|
RU2679268C1 |
| Устройство для позиционирования и определения скорости железнодорожных подвижных единиц | 2020 |
|
RU2738768C1 |
| УСТРОЙСТВО ЗОНДИРОВАНИЯ КОНДЕНСИРОВАННЫХ СРЕД | 2011 |
|
RU2460099C1 |


Изобретение относится к области железнодорожного транспорта, а именно к способам определения скорости железнодорожного состава. Способ заключается в том, что регистраторы, представляющие собой два расположенные на заданной высоте от железнодорожного полотна видеорегистратора, производят съемку железнодорожного полотна синхронно, в каждый момент времени запоминается текущий кадр с первого видеорегистратора, определяется кадр с тем же фрагментом железнодорожного полотна в видеопоследовательности со второго видеорегистратора, вычисляется сдвиг между этими кадрами, и по разнице порядковых номеров кадров и сдвигу между ними определяется скорость по формуле
где
F - темп съемки видеорегистраторов (количество кадров в секунду),
S - смещение между видеорегистраторами,
ΔL - сдвиг между кадрами с одинаковым фрагментом железнодорожного полотна с двух видеорегистраторов,
ΔN - разность номеров кадров с одинаковым фрагментом железнодорожного полотна со второго и первого видеорегистраторов. 5 ил.
Оптический способ определения скорости железнодорожного состава, основанный на использовании двух идентичных регистраторов, установленных под днищем локомотива со смещением S относительно друг друга вдоль направления его движения и непрерывно измеряющих информативный параметр, отличающийся тем, что регистраторы, представляющие собой два расположенные на заданной высоте от железнодорожного полотна видеорегистратора, производят съемку железнодорожного полотна синхронно, в каждый момент времени запоминается текущий кадр с первого видеорегистратора, определяется кадр с тем же фрагментом железнодорожного полотна в видеопоследовательности со второго видеорегистратора, вычисляется сдвиг между этими кадрами, и по разнице порядковых номеров кадров и сдвигу между ними определяется скорость по формуле
 ,
,
где
F - темп съемки видеорегистраторов (количество кадров в секунду),
S - смещение между видеорегистраторами,
ΔL - сдвиг между кадрами с одинаковым фрагментом железнодорожного полотна с двух видеорегистраторов,
ΔN - разность номеров кадров с одинаковым фрагментом железнодорожного полотна со второго и первого видеорегистраторов.
| СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНОЙ СКОРОСТИ ЛОКОМОТИВА | 2001 |
|
RU2189599C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНОЙ СКОРОСТИ ЛОКОМОТИВА | 2001 |
|
RU2189600C1 |
| ЛОКОМОТИВНАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ СКОРОСТИ ДВИЖЕНИЯ И ПРОЙДЕННОГО ПУТИ | 2008 |
|
RU2378654C1 |
| Устройство для измерения скорости подвижного состава | 1969 |
|
SU515472A3 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| DE 102010022592 A1, 01.12.2011 | |||
| JP 2011209026 A, 20.10.2011 | |||

