Изобретение относится к области систем управления нестационарными объектами, в частности к системам управления ориентацией космического аппарата (КА) по углу крена при отсутствии измерителя угловой скорости.
Известен способ ориентации КА по углу крена, заключающийся в том, что формируют сигнал задания, измеряют угол крена, определяют сигнал ошибки, из которого формируют сигнал управления [1].
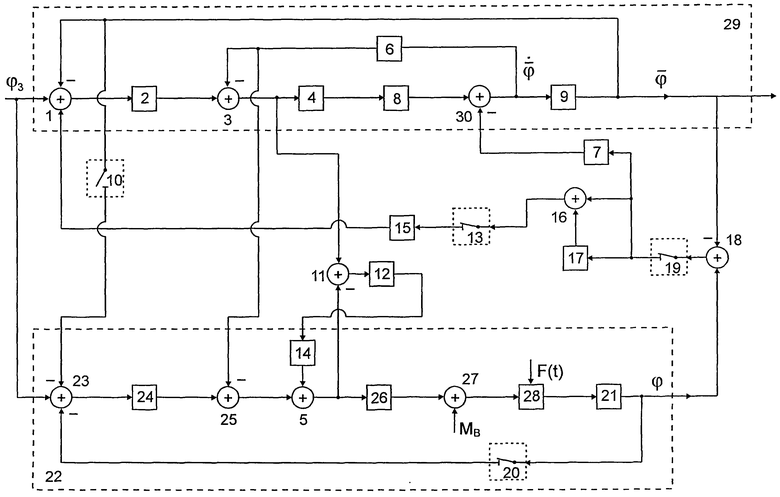
Известно также и устройство для ориентации КА по углу крена, содержащее последовательно соединенные первый сумматор, первый усилитель, второй сумматор, третий сумматор, двигатель-маховик, четвертый сумматор, космический аппарат и астродатчик, выход которого через первый нормально-замкнутый переключатель соединен с первым входом первого сумматора [1] (прототип).
Недостатками известных способа и устройства является низкая точность и надежность процедуры ориентации КА при отсутствии датчика угловой скорости и малой надежности астродатчика. С целью устранения указанных недостатков предложенный способ отличается тем, что определяют сигнал оценки угла крена, сигнал оценки угловой скорости, сигнал оценки ошибки и сигнал оценки управления, вычитают из сигнала ошибки сигнал оценки угловой скорости, определяют первый сигнал разности сигнала оценки управления и сигнала управления и суммируют сигнал управления и интеграл первого сигнала разности, определяют второй сигнал разности сигнала оценки угла крена и сигнала крена, формируют из второго сигнала разности сигнал суммы пропорциональной, дифференциальной и интегральной составляющих и сигнал суммы вычитают из сигнала оценки ошибки.
Устройство для реализации способа ориентации КА отличается тем, что оно дополнительно содержит четыре интегратора, два блока памяти, два нормально-замкнутых переключателя, нормально-разомкнутый переключатель, три усилителя, шесть сумматоров, второй вход первого сумматора через последовательно соединенные пятый сумматор, второй усилитель, шестой сумматор, модель двигателя-маховика, первый интегратор, седьмой сумматор, второй интегратор, восьмой сумматор, второй нормально-замкнутый переключатель, третий интегратор, девятый сумматор, третий нормально-замкнутый переключатель и первый блок памяти подключен ко второму входу пятого сумматора, выход второго нормально-замкнутого переключателя соединен со вторым входом девятого сумматора, а через второй блок памяти - со вторым входом седьмого сумматора, выход которого через третий усилитель соединен со вторыми входами второго и шестого сумматоров, выход астродатчика соединен со вторым входом восьмого сумматора, выход второго интегратора соединен с третьим входом пятого сумматора, а через нормально-разомкнутый переключатель - с третьим входом первого сумматора, выход шестого сумматора соединен через последовательно подключенные десятый сумматор, четвертый усилитель и четвертый интегратор со вторым входом третьего сумматора, выход которого соединен со вторым входом десятого сумматора.
Устройство для реализации способа ориентации КА приведено на чертеже.
Рассматривается случай, когда датчик угловой скорости 
1 - пятый сумматор;
2 - второй усилитель;
3 - шестой сумматор;
4 - модель двигателя-маховика;
5 - третий сумматор;
6 - третий усилитель;
7 - второй блок памяти;
8 - первый интегратор;
9 - второй интегратор;
10 - нормально-разомкнутый переключатель;
11 - десятый сумматор;
12 - четвертый усилитель;
13 - третий нормально-замкнутый переключатель;
14 - четвертый интегратор;
15 - первый блок памяти;
16 - девятый сумматор;
17 - третий интегратор;
18 - восьмой сумматор;
19 - второй нормально-замкнутый переключатель;
20 - первый нормально-замкнутый переключатель;
21 - астродатчик;
22 - основной контур ориентации (ОКО);
23 - первый сумматор;
24 - первый усилитель;
25 - второй сумматор;
26 - двигатель-маховик;
27 - четвертый сумматор;
28 - космический аппарат (КА);
29 - модель ОКО;
30 - седьмой сумматор.
Структура ОКО 22 описана в [1] и отличается лишь тем, что в ней отсутствует датчик угловой скорости 
Структура ОКО 22, как видно из чертежа, состоит из последовательно соединенных первого сумматора 23, первого усилителя 24, второго сумматора 25, третьего сумматора 5, двигателя-маховика 26, четвертого сумматора 27, КА 28 и астродатчика 21, выход которого соединен со входом первого сумматора 23 через первый нормально-замкнутый переключатель 20.
Для устойчивости ОКО 22 не хватает обратной связи по угловой скорости
Дифференциальные уравнения (ДУ), описывающие движение ОКО 22 и модели ОКО 29, имеют второй порядок [1], а параметры дифференциальных уравнений не равны, т.к. момент инерции J(t) КА 28 меняется во времени и является неизвестной величиной.
Параметры ДУ модели ОКО 29 выбраны так, чтобы они обеспечивали устойчивость движения. Для обеспечения устойчивости ОКО 22 на вход второго сумматора 25 подается через третий усилитель 6 оценка угловой скорости 
Для обеспечения точности определения оценки




Для обеспечения равенства 

где 
λ, а 0, а 1=const>0,
и который может быть представлен в виде составляющих 


где 

Сигнал коррекции 
Сигнал коррекции 



В этом случае корректирующий сигнал -λε(t) не требует наличия датчика угловой скорости
Наличие первого 20 и второго 19 нормально-замкнутых переключателей, а также нормально-разомкнутого переключателя 10 позволяет на некоторое время (как показывает практика использования процесса ориентации КА 28, на время приблизительно 5-10 минут) отключать астродатчик 21 и использовать для организации функционирования ОКО 29 только информацию об оценках угловой скорости

Таким образом, в случае выхода из строя гироскопического измерителя вектора угловой скорости (который может применяться вместо астродатчика 21 [1]) или астродатчика 21 путем переключения ОКО 22 на измерения с помощью исправного измерителя угловой скорости

Изобретательский уровень предложенного технического решения подтверждается отличительными частями формулы изобретения.
Литература
1. Васильев В.Н. Системы ориентации космических аппаратов / В.Н. Васильев. - М.: ФГУП «НПП ВНИИЭМ», 2009. С.149-156 (прототип).
2. Лащев А.Я. Метод синтеза адаптивных систем управления с эталонной моделью. Приборы и системы. Управление, контроль, диагностика. 2007. №1. С.2-6.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА ПО УГЛУ КРЕНА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2567312C2 |
| СПОСОБ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2536010C1 |
| СПОСОБ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2514649C2 |
| СПОСОБ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2519288C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЕКТОРА УГЛОВОЙ СКОРОСТИ КОСМИЧЕСКОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2519603C2 |
| СПОСОБ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2514650C2 |
| СПОСОБ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2501720C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НЕИСПРАВНОСТЕЙ ГИРОСКОПИЧЕСКОГО ИЗМЕРИТЕЛЯ ВЕКТОРА УГЛОВОЙ СКОРОСТИ КОСМИЧЕСКОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2017 |
|
RU2655008C1 |
| Система восстановления курсовой ориентации космического аппарата с использованием орбитального гирокомпаса | 2017 |
|
RU2676844C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НЕИСПРАВНОСТЕЙ ГИРОСКОПИЧЕСКОГО ИЗМЕРИТЕЛЯ ВЕКТОРА УГЛОВОЙ СКОРОСТИ КОСМИЧЕСКОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2495379C2 |
Изобретение относится к космической технике и может быть использовано для ориентации космических аппаратов (КА). Устройство ориентации КА по углу крена содержит десять сумматоров, четыре усилителя, четыре интегратора, модель двигателя-маховика, двигатель-маховик, два блока памяти, нормально-разомкнутый переключатель, три нормально-замкнутых переключателя, астродатчик, основной контур ориентации (ОКО), КА, модель ОКО. Изобретение позволяет повысить точность и надежность ориентации КА по углу крена. 1 ил.
Устройство ориентации космического аппарата по углу крена, содержащее последовательно соединенные первый сумматор, первый усилитель, второй сумматор, третий сумматор, двигатель-маховик, четвертый сумматор, космический аппарат и астродатчик, выход которого через первый нормально-замкнутый переключатель соединен с первым входом первого сумматора, отличающееся тем, что оно дополнительно содержит четыре интегратора, два блока памяти, два нормально-замкнутых переключателя, нормально-разомкнутый переключатель, три усилителя, шесть сумматоров, второй вход первого сумматора через последовательно соединенные пятый сумматор, второй усилитель, шестой сумматор, модель двигателя-маховика, первый интегратор, седьмой сумматор, второй интегратор, восьмой сумматор, второй нормально-замкнутый переключатель, третий интегратор, девятый сумматор, третий нормально-замкнутый переключатель и первый блок памяти подключен ко второму входу пятого сумматора, выход второго нормально-замкнутого переключателя соединен со вторым входом девятого сумматора, а через второй блок памяти - со вторым входом седьмого сумматора, выход которого через третий усилитель соединен со вторыми входами второго и шестого сумматоров, выход астродатчика соединен со вторым входом восьмого сумматора, выход второго интегратора соединен с третьим входом пятого сумматора, а через нормально-разомкнутый переключатель - с третьим входом первого сумматора, выход шестого сумматора соединен через последовательно подключенные десятый сумматор, четвертый усилитель и четвертый интегратор со вторым входом третьего сумматора, выход которого соединен со вторым входом десятого сумматора.
| СПОСОБ ОРИЕНТАЦИИ ЦЕЛЕВОЙ АППАРАТУРЫ КОСМИЧЕСКИХ АППАРАТОВ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2009 |
|
RU2412873C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ УПРАВЛЕНИЯ СИММЕТРИЧНОЙ РАКЕТОЙ | 2007 |
|
RU2374602C2 |
| СПОСОБ ПОВЫШЕНИЯ ПРОДУКТИВНОСТИ МОЛОДНЯКА КРОЛИКОВ | 2018 |
|
RU2694626C1 |
| US 4012018 A, 15.03.1977 | |||

