Изобретение относится к области космической техники, а именно к контролю информационной исправности датчиков угловой скорости (ДУС), входящих в состав четырехканального гироскопического измерителя вектора угловой скорости (ГИВУС), используемого в составе системы управления (СУ) ориентацией космического аппарата (КА).
Известен способ определения неисправностей гироскопического измерителя вектора угловой скорости КА, заключающийся в непрерывном контроле выходных сигналов четырех ДУС путем формирования четырех сигналов базисов, пяти пороговых сигналов, сигналов норм четырех гирокватернионов, сигнала нормы астрокватерниона и шести сигналов неисправности [1].
Недостатком известного способа определения неисправностей ГИВУС является низкая точность определения угловой скорости КА и, как следствие, низкая точность и надежность определения неисправностей ГИВУС.
Известно устройство определения неисправностей ГИВУС КА, содержащее последовательно соединенные устройство управления, два переключателя, исполнительное устройство, космический аппарат, астродатчик, соединенный с пятым выходом космического аппарата и четыре группы блоков устройства, выполняющие формирование шести сигналов неисправности [1].
Первый, второй, третий и четвертый выходы космического аппарата соединены с соответственно первым, вторым, третьим и четвертым ДУС.
Первая группа блоков устройства включает в себя первый, второй, третий и четвертый блоки задержки, пятый, шестой, седьмой и восьмой сумматоры, первый второй, третий и четвертый нелинейные блоки, а также блок, реализующий логическую операцию по схеме «И». Данная группа блоков, называемая далее первым блоком контроля, выполняет непрерывный контроль выходных сигналов ДУС на несменяемость кодов.
Выход первого ДУС соединен с первым входом пятого сумматора и через первый блок задержки со вторым входом пятого сумматора. Выход пятого сумматора через первый нелинейный блок соединен с первым входом логического блока, работающего по схеме «И».
Выход второго ДУС соединен с первым входом шестого сумматора и через второй блок задержки со вторым входом шестого сумматора. Выход шестого сумматора через второй нелинейный блок соединен со вторым входом логического блока, работающего по схеме «И».
Выход третьего ДУС соединен с первым входом седьмого сумматора и через третий блок задержки со вторым входом седьмого сумматора. Выход седьмого сумматора через третий нелинейный блок соединен с третьим входом логического блока, работающего по схеме «И».
Выход четвертого ДУС соединен с первым входом восьмого сумматора и через четвертый блок задержки со вторым входом восьмого сумматора. Выход восьмого сумматора через четвертый нелинейный блок соединен с четвертым входом логического блока, работающего по схеме «И».
Выход логического блока, работающего по схеме «И», является первым выходом устройства - первым сигналом неисправности.
Вторая группа блоков устройства включает в себя первое, второе, третье и четвертое дифференцирующие устройства, пятый, шестой, седьмой и восьмой нелинейные блоки, а также блок, реализующий логическую операцию по схеме «ИЛИ». Данная группа блоков, называемая далее вторым блоком контроля, выполняет непрерывный контроль производных от выходных сигналов ДУС на принадлежность допустимым диапазонам значений.
Выход первого ДУС через первое дифференцирующее устройство и пятый нелинейный блок соединен с первым входом третьего логического блока, работающего по схеме «ИЛИ». Выход второго ДУС через второе дифференцирующее устройство и шестой нелинейный блок соединен со вторым входом третьего логического блока, работающего по схеме «ИЛИ». Выход третьего ДУС через третье дифференцирующее устройство и седьмой нелинейный блок соединен с третьим входом третьего логического блока, работающего по схеме «ИЛИ». Выход четвертого ДУС через четвертое дифференцирующее устройство и восьмой нелинейный блок соединен с четвертым входом третьего логического блока, работающего по схеме «ИЛИ». Выход третьего логического блока, работающего по схеме «ИЛИ», является вторым выходом устройства - вторым сигналом неисправности.
Третья группа блоков устройства включает в себя девятый, десятый, одиннадцатый и двенадцатый нелинейные блоки, а также блок, реализующий логическую операцию по схеме «ИЛИ». Данная группа блоков, называемая далее третьим блоком контроля, выполняет непрерывный контроль выходных сигналов ДУС на принадлежность допустимым диапазонам значений.
Выход первого ДУС через девятый нелинейный блок соединен с первым входом второго логического блока, работающего по схеме «ИЛИ». Выход второго ДУС через десятый нелинейный блок соединен со вторым входом второго логического блока, работающего по схеме «ИЛИ». Выход третьего ДУС через одиннадцатый нелинейный блок соединен с третьим входом второго логического блока, работающего по схеме «ИЛИ». Выход четвертого ДУС через двенадцатый нелинейный блок соединен с четвертым входом второго логического блока, работающего по схеме «ИЛИ». Выход второго логического блока, работающего по схеме «ИЛИ», является третьим выходом устройства - шестым сигналом неисправности.
Выход первого ДУС соединен с первыми входами первого, второго и третьего формирователей сигнала базиса. Выход второго ДУС соединен со вторыми входами первого, второго формирователей сигнала базиса и с первым входом четвертого формирователя сигнала базиса. Выход третьего ДУС соединен с третьим входом первого формирователя сигнала базиса и со вторыми входами третьего и четвертого формирователей сигнала базиса. Выход четвертого ДУС соединен с третьими входами второго, третьего и четвертого формирователей сигнала базиса.
Векторные (трехкомпонентные) выходы первого, второго, третьего и четвертого формирователей сигнала базиса поступают соответственно, с одной стороны, на первый, второй, третий и четвертый векторные входы второго переключателя, с другой стороны, на векторные входы первого, второго, третьего и четвертого формирователей сигнала нормы кватерниона.
Четвертая группа блоков устройства включает в себя первый, второй, третий и четвертый формирователи сигнала нормы гирокватерниона, формирователь сигнала нормы астрокватерниона, девятый, десятый, одиннадцатый, двенадцатый, тринадцатый и четырнадцатый сумматоры, тринадцатый, четырнадцатый, пятнадцатый, шестнадцатый, семнадцатый и восемнадцатый нелинейные блоки, а также блок, реализующий логическую операцию по схеме «ИЛИ». Данная группа блоков, называемая далее четвертым блоком контроля, выполняет непрерывный контроль согласованности гирокватернионов базисов ориентации между собой и согласованности гирокватернионов с астрокватернионом.
Выход астродатчика через формирователь сигнала нормы астрокватерниона соединен с первыми входами девятого, десятого, одиннадцатого, двенадцатого и тринадцатого сумматоров. Ко второму входу тринадцатого сумматора подключен выход первого формирователя сигнала нормы гирокватерниона, выход тринадцатого сумматора поступает на вход тринадцатого нелинейного блока, выход тринадцатого нелинейного блока является четвертым выходом устройства - четвертым сигналом неисправности.
Выходы третьего и четвертого формирователей сигнала нормы гирокватерниона поступают, соответственно, на первый и второй входы четырнадцатого сумматора, выход четырнадцатого сумматора поступает на вход восемнадцатого нелинейного блока, выход которого является пятым выходом устройства - третьим сигналом неисправности.
Выходы первого, второго, третьего и четвертого формирователей сигнала нормы гирокватерниона соединены соответственно со вторыми входами девятого, десятого, одиннадцатого и двенадцатого сумматоров, выходы которых через, соответственно, четырнадцатый, пятнадцатый, шестнадцатый и семнадцатый нелинейные блоки поступают на первый, второй, третий и четвертый входы первого логического блока, работающего по схеме «ИЛИ». Выход первого логического блока, работающего по схеме «ИЛИ», является шестым выходом устройства - пятым сигналом неисправности.
Выход второго переключателя представляет собой текущий вектор угловой скорости КА от рабочего базиса ориентации и соединен со вторым входом устройства управления. На первый вход устройства управления поступает заданная программа изменения вектора угловой скорости КА, выдерживание которой обеспечивает требуемый закон изменения ориентации КА (инерциальная, орбитальная стабилизация КА, заданный программный разворот в пространстве и т.п.).
Третий вход первого переключателя соединен с выходом задатчика тестового сигнала.
Недостатком известного устройства, как и известного способа, является низкая точность формирования векторов угловой скорости в осях визирной системы координат КА по сигналам базисов ориентации и, как следствие, низкая точность и надежность определения неисправностей ГИВУС.
Техническим результатом предлагаемого изобретения является повышение точности и надежности определения неисправностей ГИВУС.
Указанный технический результат достигается тем, что известный способ определения неисправностей гироскопического измерителя вектора угловой скорости космического аппарата, заключающийся в непрерывном контроле четырех выходных сигналов датчиков угловой скорости путем формирования четырех сигналов базисов ориентации, пяти пороговых сигналов, сигналов норм четырех гирокватернионов, сигнала нормы астрокватерниона и шести сигналов неисправности, в части процедур формирования сигналов базисов ориентации уточняют за счет учета калибровочных и паспортных значений масштабных коэффициентов, систематических дрейфов, перекосов осей чувствительности датчиков угловой скорости относительно приборной системы координат гироскопического измерителя вектора угловой скорости и угловых погрешностей установки гироскопического измерителя вектора угловой скорости относительно визирной системы координат космического аппарата.
Технический результат достигается также тем, что известное устройство определения неисправностей гироскопического измерителя вектора угловой скорости космического аппарата, содержащее устройство управления, два переключателя, исполнительное устройство, космический аппарат, астродатчик, первый, второй, третий и четвертый датчики угловой скорости, задатчик тестового сигнала, первый, второй, третий и четвертый блоки контроля и первый, второй, третий и четвертый формирователи сигнала базиса, первые входы устройства управления, первого и второго переключателей являются входами устройства, выход устройства управления соединен со вторым входом первого переключателя, третий вход которого подключен к выходу задатчика тестового сигнала, выход первого переключателя через исполнительное устройство соединен со входом космического аппарата, первый, второй, третий и четвертый выходы которого соединены соответственно с входами первого, второго, третьего и четвертого датчиков угловой скорости, а пятый выход - со входом астродатчика, выход первого датчика угловой скорости соединен с первыми входами первого, второго и третьего блоков контроля, выход второго датчика угловой скорости - со вторыми входами первого, второго и третьего блоков контроля, выход третьего датчика угловой скорости - с третьими входами первого, второго и третьего блоков контроля, а выход четвертого датчика угловой скорости - с четвертыми входами первого, второго и третьего блоков контроля, выходы первого, второго, третьего и четвертого формирователей сигнала базиса соединены соответственно с первым, вторым, третьим и четвертым входами второго переключателя и с первым, вторым, третьим и четвертым входами четвертого блока контроля, пятый вход которого соединен с выходом астродатчика, выход второго переключателя соединен со вторым входом устройства управления, выходы первого, второго, третьего блоков контроля и первый, второй и третий выходы четвертого блока контроля являются выходами устройства, дополнительно содержит четыре усилителя, четыре сумматора и четыре задатчика постоянного сигнала, входы первого, второго, третьего и четвертого усилителей соединены соответственно с выходами первого, второго, третьего и четвертого датчиков угловой скорости, выход первого усилителя соединен через первый сумматор с первыми входами первого, второго и третьего формирователей сигнала базиса, выход второго усилителя соединен через второй сумматор со вторыми входами первого и второго формирователей сигнала базиса и с первым входом четвертого формирователя сигнала базиса, выход третьего усилителя соединен через третий сумматор с третьим входом первого формирователя сигнала базиса и вторыми входами третьего и четвертого формирователей сигнала базиса, выход четвертого усилителя соединен через четвертый сумматор с третьими входами второго, третьего и четвертого формирователей сигнала базиса, выходы первого, второго, третьего и четвертого задатчиков постоянного сигнала соединены со вторыми входами первого, второго, третьего и четвертого сумматоров соответственно. При этом каждый формирователь сигнала базиса содержит девять усилителей и три сумматора, входы седьмого, десятого и тринадцатого усилителей соединены между собой и являются первым входом формирователя сигнала базиса, входы шестого, девятого и двенадцатого усилителей соединены между собой и являются вторым входом формирователя сигнала базиса, входы пятого, восьмого и одиннадцатого усилителей соединены между собой и являются третьим входом формирователя сигнала базиса, выходы пятого, шестого и седьмого усилителей соединены с первым, вторым и третьим входами пятнадцатого сумматора, выходы восьмого, девятого и десятого усилителей соединены с первым, вторым и третьим входами шестнадцатого сумматора, выходы одиннадцатого, двенадцатого и тринадцатого усилителей соединены с первым, вторым и третьим входами семнадцатого сумматора, выходы пятнадцатого, шестнадцатого и семнадцатого сумматоров являются выходами формирователя сигнала базиса.
На фиг. 1 показана структурная схема предлагаемого устройства, на фиг. 2 - структурная схема первого блока контроля, на фиг. 3 - структурная схема второго блока контроля, на фиг. 4 - структурная схема третьего блока контроля, на фиг. 5 - структурная схема четвертого блока контроля, на фиг. 6 - структурная схема формирователя сигнала базиса ориентации.
На представленных структурных схемах приняты следующие обозначения: 1 - устройство управления, 2 - первый переключатель, 3 - исполнительное устройство, 4 - КА, 5 - астродатчик, 6 - первый ДУС, 7 - второй ДУС, 8 - третий ДУС, 9 - четвертый ДУС, 10 - задатчик тестового сигнала, 11 - первый блок контроля, 12 - второй блок контроля, 13 - третий блок контроля, 14, 15, 16, 17 - первый, второй, третий и четвертый усилители, 18, 19, 20, 21 - первый, второй, третий и четвертый сумматоры, 22, 23, 24, 25 - первый, второй, третий и четвертый задатчики постоянного сигнала, 26, 27, 28, 29 - первый, второй, третий и четвертый формирователи сигнала базиса, 30 - четвертый блок контроля, 31 - второй переключатель, 32 - сигнал управления первым переключателем, 33 - сигнал управления вторым переключателем, 34 - первый блок задержки, 35 - пятый сумматор, 36 - первый нелинейный блок, 37 - второй блок задержки, 38 - шестой сумматор, 39 - второй нелинейный блок, 40 - третий блок задержки, 41 - седьмой сумматор, 42 - третий нелинейный блок, 43 - четвертый блок задержки, 44 - восьмой сумматор, 45 - четвертый нелинейный блок, 46 - блок логической операции по схеме «И», 47 - первое дифференцирующее устройство, 48 - пятый нелинейный блок, 49 - второе дифференцирующее устройство, 50 - шестой нелинейный блок, 51 - третье дифференцирующее устройство, 52 - седьмой нелинейный блок, 53 - четвертое дифференцирующее устройство, 54 - восьмой нелинейный блок, 55 - третий блок логической операции по схеме «ИЛИ», 56, 57, 58, 59 - девятый, десятый, одиннадцатый и двенадцатый нелинейные блоки, 60 - второй блок логической операции по схеме «ИЛИ», 61, 62, 63, 64 - первый, второй, третий и четвертый формирователи сигнала нормы гирокватерниона, 65 - формирователь сигнала нормы астрокватерниона, 66, 67, 68, 69, 70, 71 - девятый, десятый, одиннадцатый, двенадцатый, тринадцатый и четырнадцатый сумматоры, 72, 73, 74, 75, 76, 77 - тринадцатый, четырнадцатый, пятнадцатый, шестнадцатый, семнадцатый и восемнадцатый нелинейные блоки, 78 - первый блок логической операции по схеме «ИЛИ», 79, 80, 81, 82, 83, 84, 85, 86, 87 - пятый, шестой, седьмой восьмой, девятый, десятый, одиннадцатый, двенадцатый и тринадцатый усилители, 88, 89, 90 - пятнадцатый, шестнадцатый и семнадцатый сумматоры.
Способ определения неисправностей гироскопического измерителя вектора угловой скорости космического аппарата основан на одновременном применении двух групп частных видов контроля, которые в совокупности и взаимосвязи позволяют решать задачу обнаружения неисправного ДУС.
К первой группе относится непрерывный контроль выходных сигналов каждого из четырех ДУС с целью обнаружения и локализации их возможных отказов в виде:
- несменяемости кодов;
- выхода выходных сигналов за пределы допустимых значений;
- выхода производных выходных сигналов за пределы допустимых значений.
К первой группе также относятся контрольные измерения приращений угловой скорости в осях чувствительности каждого ДУС при выполнении специального режима тестовой закрутки КА.
Ко второй группе относится непрерывный контроль, который основан на том, что из имеющихся четырех ДУС формируют четыре тройки, называемые базисами ориентации.
Первый базис ориентации в своем составе содержит первый 6, второй 7, третий 8 ДУС и не содержит четвертый 9 ДУС.
Второй базис ориентации в своем составе содержит первый 6, второй 7, четвертый 9 ДУС и не содержит третий 8 ДУС.
Третий базис ориентации в своем составе содержит первый 6, третий 8, четвертый 9 ДУС и не содержит второй 7 ДУС.
Четвертый базис ориентации в своем составе содержит второй 7, третий 8, четвертый 9 ДУС и не содержит первый 6 ДУС.
Для каждого из указанных четырех базисов ориентации реализовано непрерывное формирование параметров вектора угловой скорости и кватерниона ориентации КА, называемого в дальнейшем гирокватернионом базиса ориентации.
Векторы угловой скорости и гирокватернионы базисов ориентации КА, будучи изначально согласованы, при отсутствии отказов ДУС должны в дальнейшем быть близки друг к другу. В случае отказа одного из ДУС неизбежно появятся отклонения векторов угловой скорости и гирокватернионов базисов ориентации друг от друга.
При формировании сигналов управления ориентацией КА используются данные только от одного базиса, который называется рабочим. В начале работы рабочим базисом назначается первый базис. В случае, если один из ДУС, входящих в состав рабочего базиса, окажется в состоянии отказа и процедура контроля определит отказавший ДУС, немедленно рабочим базисом будет назначен новый базис, который в своем составе отказавший ДУС не содержит.
Задачей процедур второй группы контроля является обнаружение события рассогласованности, т.е. возникновения отказа среди четырех ДУС и определение отказавшего ДУС.
Вторая группа частных видов контроля определяет скалярные меры текущих рассогласований между гирокватернионами базисов ориентации и выполняет их проверку на превышение заданных пороговых значений. Обнаружение события выхода за допустимые пределы наблюдаемых рассогласований базисов является свидетельством возникновения раскалиброванности или отказа в одном из четырех ДУС, при этом для определения отказавшего ДУС требуется дополнительная информация, которая является внешней по отношению к ГИВУС. В качестве внешней информации, позволяющей определить правильный базис ориентации и, следовательно, отказавший ДУС, используются данные о кватернионе ориентации КА, полученные от астродатчика 5, входящего в состав оборудования СУ. Процедура контроля выполняет сравнение астрокватерниона с четырьмя гирокватернионами базисов ориентации. В результате такого сравнения определяется исправный базис ориентации, который наиболее точно согласован с кватернионом от астроопределений. В случае если при обнаружении рассогласованности базисов ориентации немедленное выполнение астроопределений по каким-либо причинам является невозможным, СУ переводится в кратковременный режим задания приращения кинетического момента КА вокруг определенной оси визирной системы координат (СК) на заданную тестовую величину. Измеренные значения приращений угловой скорости, получаемые от ДУС на интервале закрутки КА, сравниваются с расчетными тестовыми значениями, приведенными к их осям чувствительности. В результате такого сравнения неисправным признается ДУС, который показывает наибольшее рассогласование между измеренным приращением угловой скорости вдоль собственной оси чувствительности и соответствующим расчетным значением этого приращения.
Первый сигнал неисправности формируют при несменяемости кодов в выходных сигналах ДУС, второй сигнал неисправности - при превышении первого порогового сигнала значениями скоростей изменения выходных сигналов ДУС, третий сигнал неисправности - при превышении второго порогового сигнала значением разности норм гирокватернионов третьего и четвертого базисов ориентации. После получения хотя бы одного сигнала неисправности определяют сигнал разности между сигналом нормы гирокватерниона первого базиса ориентации и сигналом нормы астрокватерниона и при превышении им третьего порогового сигнала формируют четвертый сигнал неисправности. Пятый сигнал неисправности формируют при превышении четвертого порогового сигнала значениями разности между сигналами норм гирокватернионов и сигналом нормы астрокватерниона. После получения третьего сигнала неисправности и при невозможности оперативного проведения астроопределений размыкают контур управления КА, на вход исполнительного устройства 3 подают сигнал тестовой закрутки КА, измеряют приращения выходных сигналов ДУС на интервале закрутки, определяют отклонения полученных приращений от соответствующих расчетных значений и при превышении ими пятого порогового сигнала формируют шестой сигнал неисправности.
Устройство определения неисправностей гироскопического измерителя вектора угловой скорости космического аппарата (фиг. 1) содержит устройство управления 1, два переключателя 2 и 31, исполнительное устройство 3, космический аппарат 4, астродатчик 5, первый 6, второй 7, третий 8 и четвертый 9 датчики угловой скорости, задатчик тестового сигнала 10, первый 11, второй 12, третий 13 и четвертый 30 блоки контроля и первый 26, второй 27, третий 28 и четвертый 29 формирователи сигнала базиса, первый 14, второй 15, третий 16 и четвертый 17 усилители, первый 18, второй 19, третий 20 и четвертый 21 сумматоры и первый 22, второй 23, третий 24 и четвертый 25 задатчики постоянного сигнала. Первые входы устройства управления 1, первого 2 и второго 31 переключателей являются входами устройства. Выход устройства управления 1 соединен со вторым входом первого переключателя 2, третий вход которого подключен к выходу задатчика тестового сигнала 10. Выход первого переключателя 2 через исполнительное устройство 3 соединен со входом космического аппарата 4, первый, второй, третий и четвертый выходы которого соединены соответственно с входами первого 6, второго 7, третьего 8 и четвертого 9 датчиков угловой скорости, а пятый выход - со входом астродатчика 5. Выход первого датчика угловой скорости 6 соединен с первыми входами первого 11, второго 12 и третьего 13 блоков контроля, выход второго датчика угловой скорости 7 - со вторыми входами первого 11, второго 12 и третьего 13 блоков контроля, выход третьего датчика угловой скорости 8 - с третьими входами первого 11, второго 12 и третьего 13 блоков контроля, а выход четвертого датчика угловой скорости 9 - с четвертыми входами первого 11, второго 12 и третьего 13 блоков контроля. Выходы первого 26, второго 27, третьего 28 и четвертого 29 формирователей сигнала базиса соединены соответственно с первым, вторым, третьим и четвертым входами второго переключателя 31 и с первым, вторым, третьим и четвертым входами четвертого блока контроля 30, пятый вход которого соединен с выходом астродатчика 5. Выход второго переключателя 31 соединен со вторым входом устройства управления 1. Входы первого 14, второго 15, третьего 16 и четвертого 17 усилителей соединены соответственно с выходами первого 6, второго 7, третьего 8 и четвертого 9 датчиков угловой скорости. Выход первого усилителя 14 соединен через первый сумматор 18 с первыми входами первого 26, второго 27 и третьего 28 формирователей сигнала базиса, выход второго усилителя 15 соединен через второй сумматор 19 со вторыми входами первого 26 и второго 27 формирователей сигнала базиса и с первым входом четвертого формирователя сигнала базиса 29, выход третьего усилителя 16 соединен через третий сумматор 20 с третьим входом первого формирователя сигнала базиса 26 и вторыми входами третьего 28 и четвертого 29 формирователей сигнала базиса, выход четвертого усилителя 17 соединен через четвертый сумматор 21 с третьими входами второго 27, третьего 28 и четвертого 29 формирователей сигнала базиса, выходы первого 22, второго 23, третьего 24 и четвертого 25 задатчиков постоянного сигнала соединены со вторыми входами первого 18, второго 19, третьего 20 и четвертого 21 сумматоров соответственно. Выходы первого 11, второго 12, третьего 13 блоков контроля и первый, второй и третий выходы четвертого блока контроля 30 являются выходами устройства - сигналами неисправности.
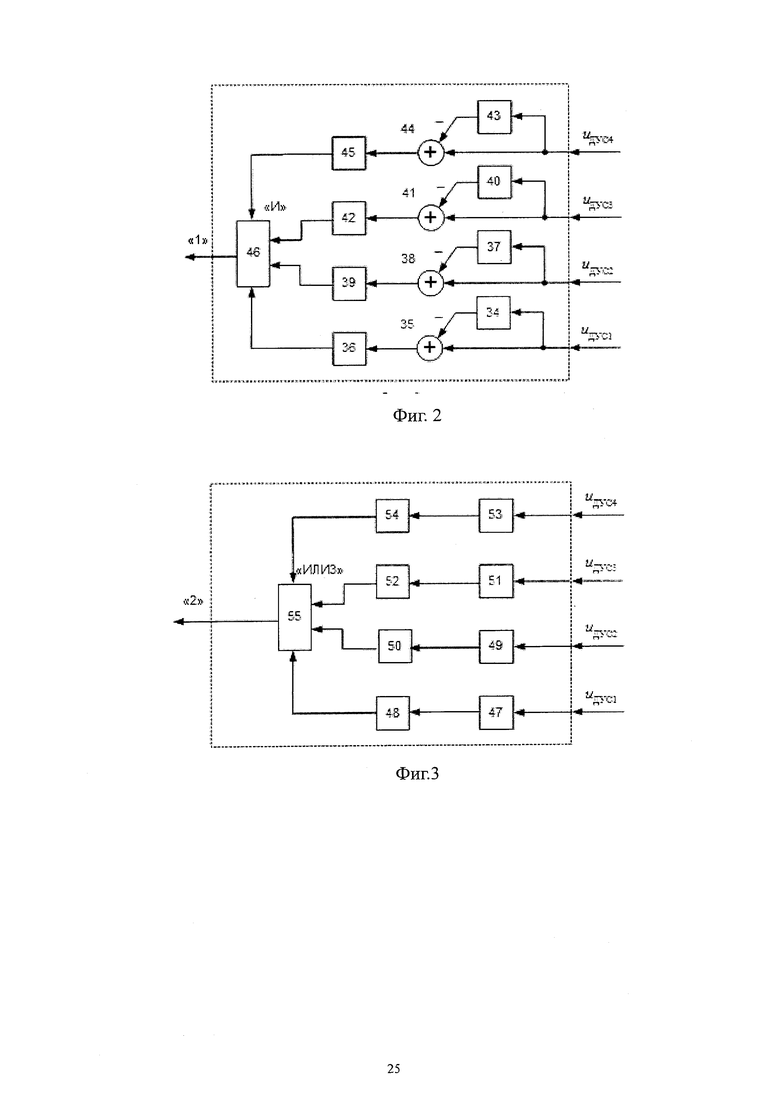
Первый блок контроля 11 (фиг. 2) является блоком контроля несменяемости кодов и имеет первый 34, второй 37, третий 40 и четвертый 43 блоки задержки, пятый 35, щестой 38, седьмой 41 и восьмой 44 сумматоры, первый 36, второй 39, третий 42 и четвертый 45 нелинейные блоки и блок логической операции по схеме «И» 46. Первые входы пятого 35, щестого 38, седьмого 41 и восьмого 44 сумматоров соединены с выходами первого 6, второго 7, третьего 8 и четвертого 9 датчиков угловой скорости непосредственно, и, соответственно, через первый 34, второй 37, третий 40 и четвертый 43 блоки задержки - со вторыми входами пятого 35, щестого 38, седьмого 41 и восьмого 44 сумматоров, выходы сумматоров соединены через первый 36, второй 39, третий 42 и четвертый 45 нелинейные блоки с первым, вторым, третьим и четвертым входами блока логической операции по схеме «И» 46 соответственно, выход которого является первым выходом устройства определения неисправностей ГИВУС - первым сигналом неисправности.
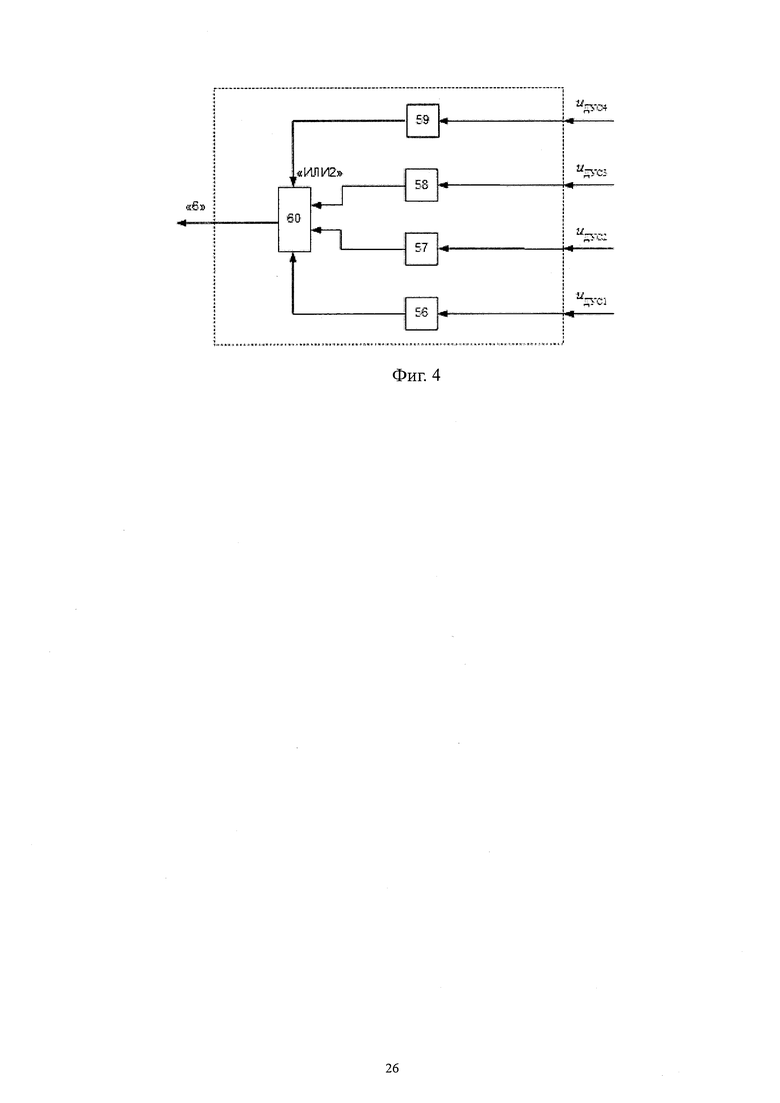
Второй блок контроля 12 (фиг. 3) является блоком контроля скоростей изменения выходных сигналов ДУС и имеет первое 47, второе 49, третье 51 и четвертое 53 дифференцирующих устройства, пятый 48, шестой 50, седьмой 52 и восьмой 54 нелинейные блоки и третий блок логической операции по схеме «ИЛИ» 55. Входы первого 47, второго 49, третьего 51 и четвертого 53 дифференцирующих устройств соединены с выходами первого 6, второго 7, третьего 8 и четвертого 9 датчиков угловой скорости, а выходы дифференцирующих устройств 47, 49, 51 и 53 через пятый 48, шестой 50, седьмой 52 и восьмой 54 нелинейные блоки - с первым, вторым, третьим и четвертым входами третьего блока логической операции по схеме «ИЛИ» 55 соответственно, выход которого является вторым выходом устройства определения неисправностей ГИВУС - вторым сигналом неисправности.
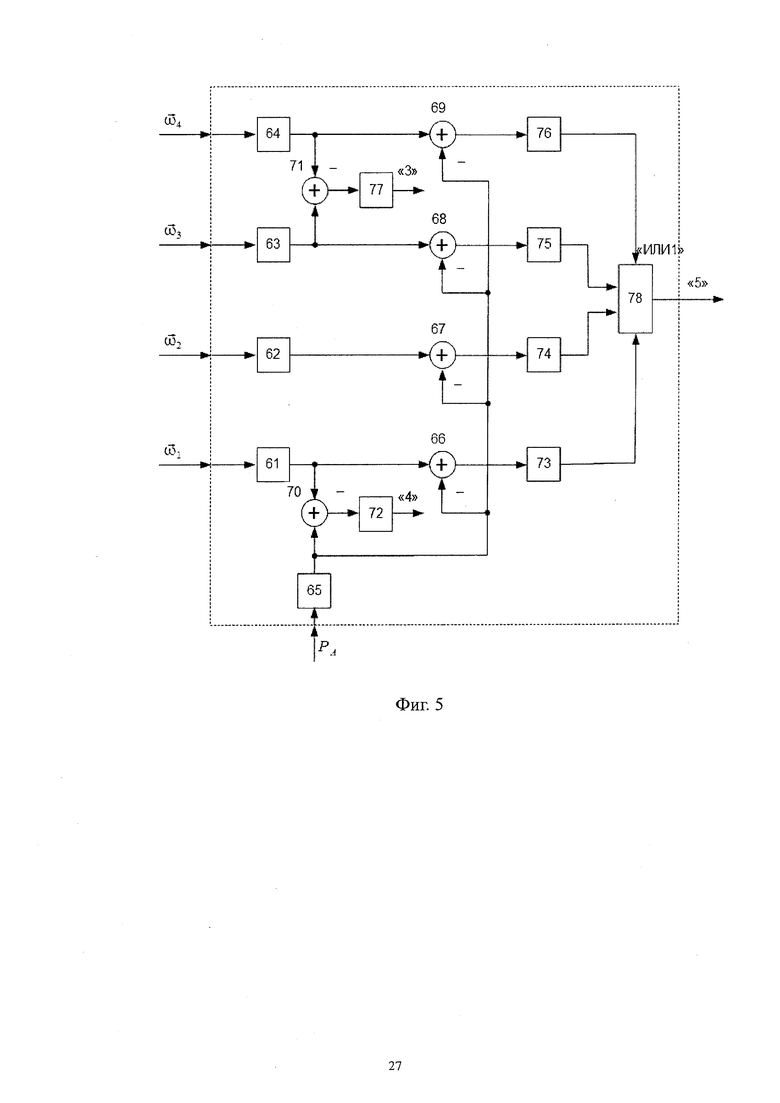
Третий блок контроля 13 (фиг. 4) является блоком контроля выходных сигналов ДУС и имеет девятый 56, десятый 57, одиннадцатый 58 и двенадцатый 59 нелинейные блоки и второй блок логической операции по схеме «ИЛИ» 60. Входы девятого 56, десятого 57, одиннадцатого 58 и двенадцатого 59 нелинейных блоков соединены с выходами первого 6, второго 7, третьего 8 и четвертого 9 датчиков угловой скорости, а выходы нелинейных блоков - с первым, вторым, третьим и четвертым входами второго блока логической операции по схеме «ИЛИ» 60 соответственно, выход которого является третьим выходом устройства определения неисправностей ГИВУС - шестым сигналом неисправности.
Четвертый блок контроля 30 (фиг. 5) является блоком контроля согласованности гирокватернионов между собой и согласованности каждого из гирокватернионов с астрокватернионом и имеет первый 61, второй 62, третий 63 и четвертый 64 формирователи сигнала нормы гирокватерниона, формирователь сигнала нормы астрокватерниона 65, девятый 66, десятый 67, одиннадцатый 68, двенадцатый 69, тринадцатый 70 и четырнадцатый 71 сумматоры, тринадцатый 72, четырнадцатый 73, пятнадцатый 74, шестнадцатый 75, семнадцатый 76 и восемнадцатый 77 нелинейные блоки и первый блок логической операции по схеме «ИЛИ» 78. Вход формирователя сигнала нормы астрокватерниона 65 соединен с выходом астродатчика 5, а входы первого 61, второго 62, третьего 63 и четвертого 64 формирователей сигнала нормы гирокватерниона соединены с первым 26, вторым 27, третьим 28 и четвертым 29 формирователями сигнала базиса соответственно. Выходы первого 61, второго 62, третьего 63 и четвертого 64 формирователей сигнала нормы гирокватерниона подключены через последовательно соединенные девятый 66, десятый 67, одиннадцатый 68, двенадцатый 69 сумматоры и четырнадцатый 73, пятнадцатый 74, шестнадцатый 75, семнадцатый 76 нелинейные блоки с первым, вторым, третьим и четвертым входами первого блока логической операции по схеме «ИЛИ» 78 соответственно. Выход формирователя сигнала нормы астрокватерниона 65 соединен со вторыми входами девятого 66, десятого 67, одиннадцатого 68, двенадцатого 69 сумматоров и через тринадцатый сумматор 70 - с входом тринадцатого нелинейного блока 72, выход которого является четвертым выходом устройства определения неисправностей ГИВУС - четвертым сигналом неисправности. Выход третьего формирователя сигнала нормы гирокватерниона 74 (39) через семнадцатый сумматор 81 (44) соединен со входом восемнадцатого нелинейного блока 87 (43), выход которого является пятым выходом устройства определения неисправностей ГИВУС - третьим сигналом неисправности. Выходы первого 61 и четвертого 64 формирователей сигнала нормы гирокватерниона соединены со вторыми входами девятого 66 и двенадцатого 69 сумматоров соответственно. Выход первого блока логической операции по схеме «ИЛИ» 78 является шестым выходом устройства определения неисправностей ГИВУС - пятым сигналом неисправности.
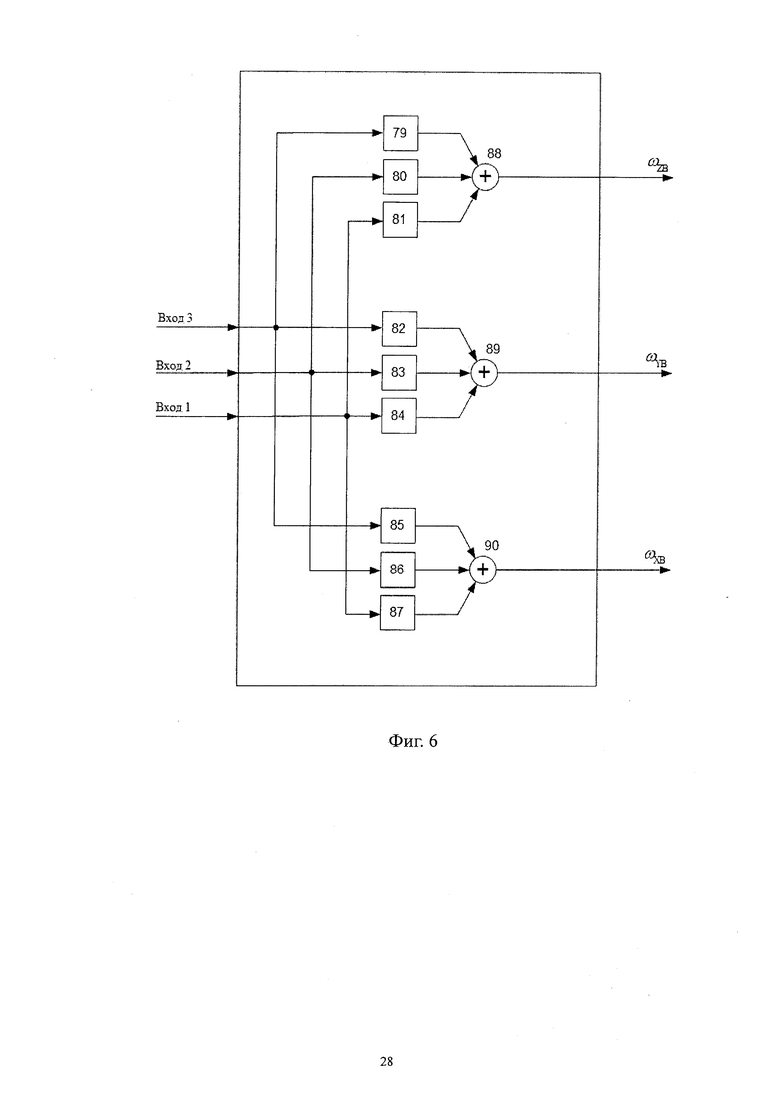
Формирователь сигнала базиса (фиг. 6) содержит пятый 79, шестой 80, седьмой 81, восьмой 82, девятый 83, десятый 84, одиннадцатый 85, двенадцатый 86 и тринадцатый 87 усилители и пятнадцатый 88, шестнадцатый 89 и семнадцатый 90 сумматоры. Входы седьмого 81, десятого 84 и тринадцатого 87 усилителей соединены между собой и являются первым входом формирователя сигнала базиса, входы шестого 80, девятого 83 и двенадцатого 86 усилителей соединены между собой и являются вторым входом формирователя сигнала базиса, входы пятого 79, восьмого 82 и одиннадцатого 85 усилителей соединены между собой и являются третьим входом формирователя сигнала базиса. Выходы пятого 79, шестого 80 и седьмого 81 усилителей соединены с первым, вторым и третьим входами пятнадцатого 88 сумматора, выходы восьмого 82, девятого 83 и десятого 84 усилителей соединены с первым, вторым и третьим входами шестнадцатого сумматора 89, выходы одиннадцатого 85, двенадцатого 86 и тринадцатого 87 усилителей соединены с первым, вторым и третьим входами семнадцатого сумматора 90. Выходы пятнадцатого 88, шестнадцатого 89 и семнадцатого 90 сумматоров являются векторными выходами формирователя сигнала базиса.
Устройство определения неисправностей ГИВУС космического аппарата, реализующее заявленный способ, работает следующим образом.
Уточняющая коррекция выходных сигналов ДУС, обеспечивающая учет калибровочных значений их масштабных коэффициентов и систематических дрейфов, выполняется за счет внедрения в выходные каналы каждого ДУС дополнительных блоков корректирующих преобразований. Дополнительные блоки показаны на структурной схеме предлагаемого устройства фиг. 1. К ним относятся первый, второй, третий и четвертый усилительные блоки (14, 15, 16, 17), первый, второй, третий и четвертый сумматоры (18, 19, 20, 21), первый, второй, третий и четвертый задатчики постоянного сигнала (22, 23, 24, 25). Коэффициенты усиления усилительных блоков задаются равными калибровочным значениям масштабных коэффициентов, значения задатчиков постоянных сигналов задаются равными калибровочным значениям систематических дрейфов тех ДУС, к выходным каналам которых указанные блоки подключены. Преобразования выходных сигналов ДУС, представленные на структурной схеме устройства фиг. 1, имеют следующий вид

где  - выходной сигнал ДУС_к,
- выходной сигнал ДУС_к,
 - калибровочное значение масштабного коэффициента ДУС_к,
- калибровочное значение масштабного коэффициента ДУС_к,
 - калибровочное значение систематического дрейфа ДУС_к,
- калибровочное значение систематического дрейфа ДУС_к,
 - уточненные значения проекции угловой скорости КА на ось чувствительности ДУС_к,
- уточненные значения проекции угловой скорости КА на ось чувствительности ДУС_к,
к=1÷4 - номер ДУС.
Уточняющая коррекция преобразований угловых скоростей КА от осей чувствительности ДУС базисов ориентации к осям визирной СК КА, обеспечивающая учет паспортизованных значений углов установки осей чувствительности ДУС каждого из базисов ориентации относительно приборной СК ГИВУС в совокупности с паспортизованными значениями углов установки ГИВУС относительно визирной СК КА, выполняется за счет изменения структурных схем устройств первого, второго, третьего и четвертого формирователей сигналов базисов, представленных на фиг. 1 блоками 26, 27, 28, 29. Каждый из указанных блоков выполняет формирование вектора угловой скорости КА в осях визирной СК КА (сигнала базиса) для соответствующего базиса ориентации
_  -- сигнал первого базиса ориентации;
-- сигнал первого базиса ориентации;
-  - сигнал второго базиса ориентации;
- сигнал второго базиса ориентации;
-  - сигнал третьего базиса ориентации;
- сигнал третьего базиса ориентации;
-  - сигнал четвертого базиса ориентации.
- сигнал четвертого базиса ориентации.
При формировании сигналов базисов ориентации в качестве исходных данных используются откорректированные выходные сигналы ДУС, входящие в состав базиса:
-  - вектор выходных сигналов ДУС первого базиса;
- вектор выходных сигналов ДУС первого базиса;
-  - вектор выходных сигналов ДУС второго базиса;
- вектор выходных сигналов ДУС второго базиса;
-  - вектор выходных сигналов ДУС третьего базиса;
- вектор выходных сигналов ДУС третьего базиса;
-  - вектор выходных сигналов ДУС четвертого базиса.
- вектор выходных сигналов ДУС четвертого базиса.
Структурные схемы блоков 26, 27, 28, 29 являются одинаковыми для всех четырех базисов ориентации, индивидуальными характеристиками для каждого блока являются значения коэффициентов усиления, входящих в его состав усилителей. На фиг. 6 показана типовая структурная схема формирователя сигнала базиса. Преобразования, представленные структурной схемой фиг. 6, являются матричными преобразованиями


Значения элементов матриц M_1, M_2, M_3, M_4 определяют расчетным образом по известным паспортизованным значениям углов установки осей чувствительности ДУС каждого из базисов ориентации относительно приборной СК ГИВУС в совокупности с паспортизованными значениями углов установки ГИВУС относительно визирной СК КА. Полученные таким образом значения девяти элементов каждой из матриц M_1, M_2, M_3, M_4 используются в качестве соответствующих значений коэффициентов усиления для каждого набора из девяти усилительных блоков (79, 80, 81, 82, 83, 84, 85, 86, 87) соответствующего формирователя сигнала базиса.
Таким образом, заявленный способ и устройство, его реализующее, позволяют выполнять контроль каналов измерения угловой скорости КА путем формирования шести сигналов неисправности с улучшенной точностью. Данные сигналы неисправности поступают на вход вычислителя системы управления КА, являются исходными данными для обнаружения состояния отказа среди измерителей ГИВУС и определения отказавшего ДУС. В результате обработки указанных шести сигналов неисправности вычислитель системы управления КА формирует сигналы управления первым 32 и вторым 33 переключателями, обеспечивающими, при обнаружении и локализации отказа одного из ДУС, перевод в статус рабочего базиса нового базиса, который в своем составе отказавший ДУС не содержит. Схемные решения реализации процедуры определения отказавшего ДУС по наблюдаемым шести сигналам неисправности в заявке не указаны.
Источники информации
1. Патент RU 2495379 C2, 28.12.2011, G01C 21/24.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ НЕИСПРАВНОСТЕЙ ГИРОСКОПИЧЕСКОГО ИЗМЕРИТЕЛЯ ВЕКТОРА УГЛОВОЙ СКОРОСТИ КОСМИЧЕСКОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2495379C2 |
| СПОСОБ ИЗМЕРЕНИЯ ВЕКТОРА УГЛОВОЙ СКОРОСТИ КОСМИЧЕСКОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2519603C2 |
| СПОСОБ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА ПО УГЛУ КРЕНА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2567312C2 |
| СПОСОБ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА ПО УГЛУ КРЕНА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2564936C1 |
| СПОСОБ УПРАВЛЕНИЯ ДАТЧИКОМ ИНФРАКРАСНОЙ ВЕРТИКАЛИ ЗЕМЛИ С АВТОПОДСТРОЙКОЙ УГЛА КРУГОВОГО СКАНИРОВАНИЯ | 2023 |
|
RU2814305C1 |
| СПОСОБ ФОРМИРОВАНИЯ 4-КАНАЛЬНОЙ ОТКАЗОУСТОЙЧИВОЙ СИСТЕМЫ БОРТОВОГО КОМПЛЕКСА УПРАВЛЕНИЯ ПОВЫШЕННОЙ ЖИВУЧЕСТИ И ЭФФЕКТИВНОГО ЭНЕРГОПОТРЕБЛЕНИЯ И ЕГО РЕАЛИЗАЦИЯ ДЛЯ КОСМИЧЕСКИХ ПРИМЕНЕНИЙ | 2011 |
|
RU2449352C1 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2013 |
|
RU2563333C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СИСТЕМЫ УГЛОВОЙ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2004 |
|
RU2265876C1 |
| СИСТЕМА УПРАВЛЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2013 |
|
RU2560204C2 |
| СПОСОБ КАЛИБРОВКИ ДАТЧИКОВ УГЛОВОЙ СКОРОСТИ БЕСПЛАТФОРМЕННОГО ИНЕРЦИАЛЬНОГО ИЗМЕРИТЕЛЬНОГО МОДУЛЯ | 2010 |
|
RU2447404C2 |
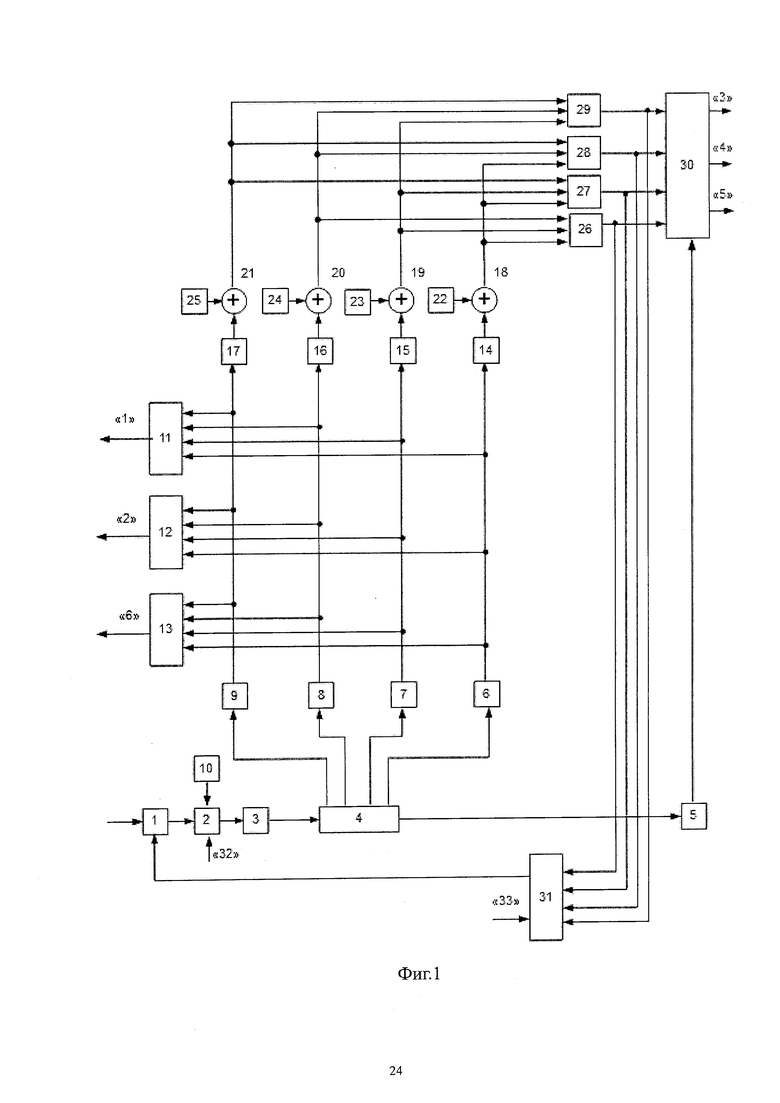
Изобретение относится к области бортового приборостроения и может найти применение для определения неисправностей гироскопического измерителя вектора угловой скорости (ГИВУС) космического аппарата. Технический результат – расширение функциональных возможностей на основе повышения точности и надежности определения неисправностей ГИВУС. Для этого осуществляется контроль каналов измерения угловой скорости космического аппарата путем формирования шести сигналов неисправности, которые поступают на вход вычислителя системы управления космического аппарата и являются исходными данными для обнаружения состояния отказа среди измерителей гироскопического измерителя вектора угловой скорости и определения отказавшего датчика угловой скорости. При этом используют устройство управления 1, первый переключатель 2, исполнительное устройство 3, космический аппарат 4, астродатчик 5, четыре датчика угловой скорости 6, 7, 8 и 9, задатчик тестового сигнала 10, первый 11, второй 12, третий 13 блоки контроля, четыре усилителя 14, 15, 16 и 17, четыре сумматора 18, 19, 20 и 21, четыре задатчика постоянного сигнала 22, 23, 24 и 25, четыре формирователя сигнала базиса 26, 27, 28 и 29, четвертый блок контроля 30 и второй переключатель 31. 2 н. и 1 з.п. ф-лы, 6 ил.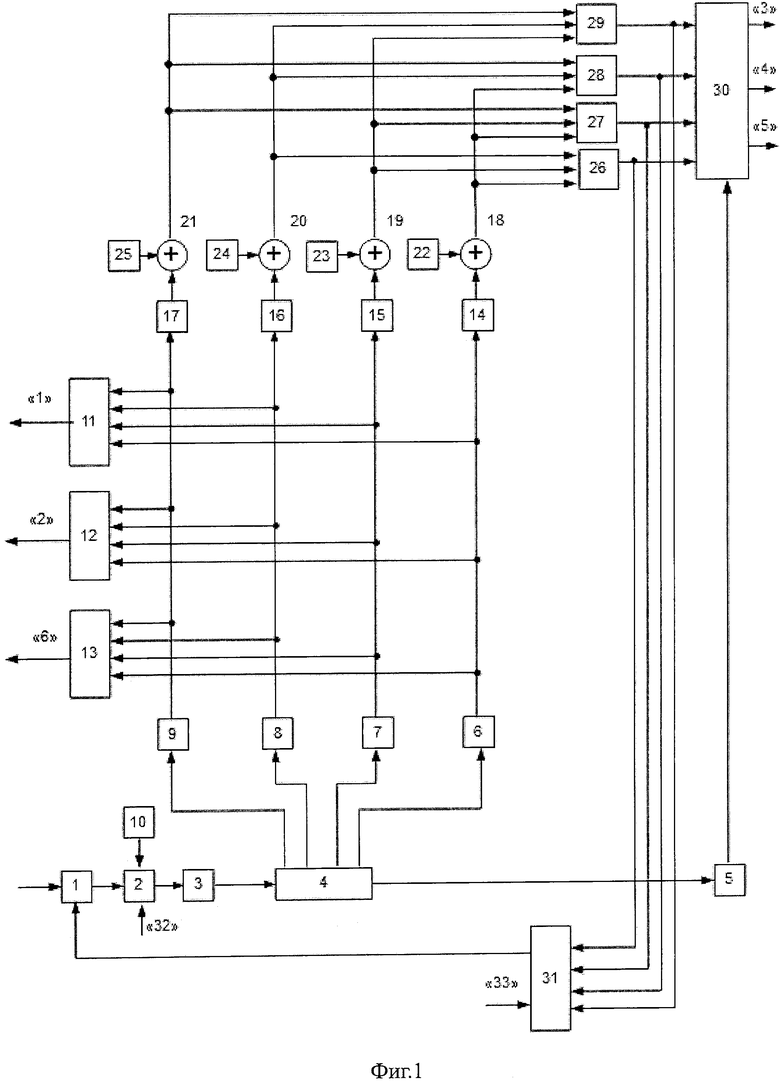
1. Способ определения неисправностей гироскопического измерителя вектора угловой скорости космического аппарата, заключающийся в непрерывном контроле четырех выходных сигналов датчиков угловой скорости путем формирования четырех сигналов базисов ориентации, пяти пороговых сигналов, сигналов норм четырех гирокватернионов, сигнала нормы астрокватерниона и шести сигналов неисправности, отличающийся тем, что сигналы базисов ориентации формируют с учетом калибровочных и паспортных значений масштабных коэффициентов, систематических дрейфов, перекосов осей чувствительности датчиков угловой скорости относительно приборной системы координат гироскопического измерителя вектора угловой скорости и угловых погрешностей установки гироскопического измерителя вектора угловой скорости относительно визирной системы координат космического аппарата.
2. Устройство определения неисправностей гироскопического измерителя вектора угловой скорости космического аппарата, содержащее устройство управления, два переключателя, исполнительное устройство, космический аппарат, астродатчик, первый, второй, третий и четвертый датчики угловой скорости, задатчик тестового сигнала, первый, второй, третий и четвертый блоки контроля и первый, второй, третий и четвертый формирователи сигнала базиса, первые входы устройства управления, первого и второго переключателей являются входами устройства, выход устройства управления соединен со вторым входом первого переключателя, третий вход которого подключен к выходу задатчика тестового сигнала, выход первого переключателя через исполнительное устройство соединен с входом космического аппарата, первый, второй, третий и четвертый выходы которого соединены соответственно с входами первого, второго, третьего и четвертого датчиков угловой скорости, а пятый выход - с входом астродатчика, выход первого датчика угловой скорости соединен с первыми входами первого, второго и третьего блоков контроля, выход второго датчика угловой скорости - со вторыми входами первого, второго и третьего блоков контроля, выход третьего датчика угловой скорости - с третьими входами первого, второго и третьего блоков контроля, а выход четвертого датчика угловой скорости - с четвертыми входами первого, второго и третьего блоков контроля, выходы первого, второго, третьего и четвертого формирователей сигнала базиса соединены соответственно с первым, вторым, третьим и четвертым входами второго переключателя и с первым, вторым, третьим и четвертым входами четвертого блока контроля, пятый вход которого соединен с выходом астродатчика, выход второго переключателя соединен со вторым входом устройства управления, выходы первого, второго, третьего блоков контроля и первый, второй и третий выходы четвертого блока контроля являются выходами устройства, отличающееся тем, что оно дополнительно содержит четыре усилителя, четыре сумматора и четыре задатчика постоянного сигнала, входы первого, второго, третьего и четвертого усилителей соединены соответственно с выходами первого, второго, третьего и четвертого датчиков угловой скорости, выход первого усилителя соединен через первый сумматор с первыми входами первого, второго и третьего формирователей сигнала базиса, выход второго усилителя соединен через второй сумматор со вторыми входами первого и второго формирователей сигнала базиса и с первым входом четвертого формирователя сигнала базиса, выход третьего усилителя соединен через третий сумматор с третьим входом первого формирователя сигнала базиса и вторыми входами третьего и четвертого формирователей сигнала базиса, выход четвертого усилителя соединен через четвертый сумматор с третьими входами второго, третьего и четвертого формирователей сигнала базиса, выходы первого, второго, третьего и четвертого задатчиков постоянного сигнала соединены со вторыми входами первого, второго, третьего и четвертого сумматоров соответственно.
3. Устройство определения неисправностей гироскопического измерителя вектора угловой скорости космического аппарата по п. 1, отличающееся тем, что формирователь сигнала базиса содержит девять усилителей и три сумматора, входы седьмого, десятого и тринадцатого усилителей соединены между собой и являются первым входом формирователя сигнала базиса, входы шестого, девятого и двенадцатого усилителей соединены между собой и являются вторым входом формирователя сигнала базиса, входы пятого, восьмого и одиннадцатого усилителей соединены между собой и являются третьим входом формирователя сигнала базиса, выходы пятого, шестого и седьмого усилителей соединены с первым, вторым и третьим входами пятнадцатого сумматора, выходы восьмого, девятого и десятого усилителей соединены с первым, вторым и третьим входами шестнадцатого сумматора, выходы одиннадцатого, двенадцатого и тринадцатого усилителей соединены с первым, вторым и третьим входами семнадцатого сумматора, выходы пятнадцатого, шестнадцатого и семнадцатого сумматоров являются выходами формирователя сигнала базиса.
| СПОСОБ ОПРЕДЕЛЕНИЯ НЕИСПРАВНОСТЕЙ ГИРОСКОПИЧЕСКОГО ИЗМЕРИТЕЛЯ ВЕКТОРА УГЛОВОЙ СКОРОСТИ КОСМИЧЕСКОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2495379C2 |
| СПОСОБ КОМПЕНСАЦИИ СИСТЕМАТИЧЕСКИХ СОСТАВЛЯЮЩИХ ДРЕЙФА ГИРОСКОПИЧЕСКИХ ДАТЧИКОВ | 2015 |
|
RU2598155C1 |
| US 7801694 B1, 21.09.2010 | |||
| JP 2000111348 A, 18.04.2000 | |||
| "Буран" | |||
| Основы проектирования интеллектуальной системы управления орбитальным кораблем на атмосферном участке полета | |||
| / Под ред | |||
| д.т.н., проф | |||
| А.С | |||
| Сырова | |||
| - М.: Изд-во МОКБ "Марс", 2013, с.154-189. | |||

