Область техники, к которой относится изобретение
Настоящее изобретение относится к составному транспортному средству (далее - автопоезду) для перевозки тяжеловесных грузов, содержащему по меньшей мере первый тягач, механически соединенный со вторым тягачом.
Уровень техники
Перевозка тяжеловесных грузов относится к перевозке по дорогам нестандартных грузов. Обычно это делается с помощью тягача и специального прицепа, рассчитанного на нестандартный груз. Груз может являться нестандартным, например, по весу и/или размеру. Перевозка даже еще более крупных грузов описана в заявке US 2001/0003393, в которой предложен комбинированный автопоезд, состоящий из тягача, содержащего первый источник энергии, который размещается в нем, и прицепа, механически соединенного с тягачом и содержащего второй источник энергии, который размещается в нем. За счет дополнительной мощности, обеспечиваемой вторым источником энергии, увеличивается удельная мощность автопоезда на единицу массы.
Одним из конкретных недостатков известного из уровня техники решения является необходимость специально конструировать такой автопоезд и затем производить его в очень небольших количествах в связи с ограниченным спросом на такое высокоспециализированное оборудование, что повышает его общую стоимость.
Соответственно, существует потребность в усовершенствованном автопоезде для перевозки тяжеловесных грузов, в котором преодолен упомянутый недостаток.
Краткое изложение сущности изобретения
В основу настоящего изобретения положена задача создания автопоезда для перевозки тяжеловесных грузов, в котором частично преодолены упомянутые недостатки. Решение этой задачи обеспечивается за счет признаков отличительной части п. 1, согласно которому каждый тягач представляет собой отдельно управляемый тягач, содержащий кабину водителя, устройство цифровой связи, рулевые колеса, тормозную систему и силовую передачу, содержащую источник энергии, фрикционное сцепление и автоматическую трансмиссию, при этом фрикционное сцепление рассчитано на включение и выключение с целью передачи крутящего момента на валу привода от источника энергии автоматической трансмиссии, между тягачами посредством упомянутых устройств цифровой связи установлена линия цифровой связи, а система управления первого тягача рассчитана на управление по меньшей мере нагрузкой на фрикционное сцепление первого и второго тягачей с целью снижения риска перегрева какого-либо из фрикционных сцеплений при их включении или выключении.
Задачей изобретения является создание способа эксплуатации автопоезда для перевозки тяжеловесных грузов, в котором частично преодолены упомянутые недостатки. Решение этой задачи обеспечивается за счет признаков отличительной части п. 12, который включает использование отдельно управляемого тягача в качестве каждого тягача, содержащего по меньшей мере кабину водителя, устройство цифровой связи, рулевые колеса, тормозную систему и силовую передачу, содержащую источник энергии, фрикционное сцепление и автоматическую трансмиссию, при этом фрикционное сцепление включается и выключается с целью передачи крутящего момента на валу привода от источника энергии автоматической трансмиссии. Кроме того, между тягачами посредством упомянутых устройств цифровой связи устанавливается линия цифровой связи, а система управления первого тягача управляет по меньшей мере нагрузкой на фрикционное сцепление первого и второго тягачей с целью снижения риска перегрева какого-либо из фрикционных сцеплений при их включении или выключении.
За счет формирования автопоезда по меньшей мере из двух отдельно управляемых тягачей не требуется дорогостоящий специально сконструированный прицеп. Вместо этого для выполнения особой задачи перевозки тяжеловесных грузов могут быть объединены два стандартных тягача, которые в противном случае используются по отдельности, за чего повышается общая грузоподъемность при перевозке тяжеловесных грузов. Могут использоваться стандартные тягачи различных типов и/или с различными характеристиками силовой передачи. Соответственно, задачи перевозки тяжеловесных грузов могут выполняться более гибко без необходимости использования дорогостоящего особого прицепа.
В связи с возможными относительно высокими уровнями пробуксовки трансмиссии тягачи для перевозки тяжеловесных грузов часто оснащают трансмиссиями гидротрансформатора во избежание чрезмерного износа или перегрева трансмиссии. Тем не менее, в силу присущей им конструкции трансмиссии гидротрансформатора имеют относительно высокие потери на трение, что приводит к увеличению расхода топлива. Автоматические трансмиссии на основе фрикционных сцеплений имеют относительно низкие потери на трение и, следовательно, также низкий расход топлива, но при этом повышается риск перегрева фрикционного сцепления, в частности сухих сцеплений.
Когда транспортное средство для перевозки тяжеловесных грузов трогается с места из неподвижного состояния, при включении фрикционного сцепления каждого тягача оно сначала пробуксовывает, пока не будет достигнута достаточная скорость для обеспечения одинаковой частоты вращения входного и выходного валов фрикционного сцепления. С учетом нестандартных тяжеловесных грузов для перевозки и потенциального уклона дороги фрикционное сцепление каждого тягача испытывает серьезную нагрузку, в связи с чем высок риск перегрева фрикционного сцепления. В случае автопоезда, содержащего по меньшей мере два отдельно управляемых тягача, этот риск также является высоким из-за отсутствия синхронизации нагрузки на сцепление каждого тягача. Например, ведущий тягач может работать на максимальной мощности, а ведомый тягач - на уровне всего 50% полной мощности. В этой ситуации быстро происходит повреждение фрикционного сцепления ведущего тягача. Разумеется, что аналогичная ситуация может возникать при выключении фрикционных сцеплений.
Для предотвращения перегрузки фрикционного сцепления какого-либо из тягачей согласно изобретению система управления первого тягача рассчитана на регулирование нагрузки на фрикционные сцепления с целью снижения риска перегрева какого-либо из фрикционных сцеплений первого и второго тягачей при их включении или выключении.
Дополнительные преимущества достигаются за счет реализации одного или нескольких признаков зависимых пунктов формулы изобретения. Система управления может быть рассчитана на управление фрикционным сцеплением каждого из тягачей таким образом, чтобы различие в относительных нагрузках на каждое из фрикционных сцеплений не превышало определенной величины.
Система управления может быть дополнительно рассчитана на синхронизацию относительного крутящего момента на валу привода каждого из тягачей по меньшей мере между фазами переключений передач.
Система управления может быть дополнительно рассчитана на регулирование режима работы автоматической трансмиссии каждого из тягачей.
Система управления может быть дополнительно рассчитана на управление тормозной системой каждого из тягачей с целью выравнивания тормозной нагрузки каждого из тягачей.
Система управления может быть дополнительно рассчитана на асинхронное переключение передач автоматической трансмиссии каждого из тягачей таким образом, чтобы по меньшей мере один тягач приводил в движение автопоезд на протяжении фаз переключений передач другого тягача.
Автопоезд может действовать в режиме ведущий-ведомый, при этом второй тягач подчиняется выходным командам системы управления первого тягача.
Система управления первого тягача может быть дополнительно рассчитана на регулирование по меньшей мере уровня энергии фрикционного сцепления первого и второго тягачей с учетом также времени пробуксовки каждого фрикционного сцепления с целью снижения риска перегрева какого-либо из фрикционных сцеплений.
Система управления предпочтительно учитывает индивидуальный верхний предельный уровень энергии каждого из фрикционных сцеплений при регулировании нагрузки на каждое фрикционное сцепление.
Система управления предпочтительно учитывает индивидуальную скорость рассеяния мощности каждого фрикционного сцепления при регулировании нагрузки на каждое фрикционное сцепление.
Предусмотрено, что водитель первого тягача обеспечивает направление рулевого управления, запрос крутящего момента и запрос замедления, а водитель второго тягача обеспечивает направление рулевого управления, а также предпочтительно ручное торможение второго тягача.
Краткое описание чертежей
Настоящее изобретение будет подробно описано далее со ссылкой на чертежи, на которых:
на фиг. 1 показан автопоезд для перевозки тяжеловесных грузов согласно изобретению,
на фиг. 2 - функциональная блок-схема автопоезда для перевозки тяжеловесных грузов согласно изобретению.
Ссылочные номера
Подробное описание
Далее просто в качестве иллюстрации одного из способов осуществления изобретения представлен и рассмотрен лишь один вариант осуществления изобретения. Для обозначения одинаковых функциональных элементов каждого автопоезда используются одинаковые ссылочные позиции.
На фиг. 1 схематически показан автопоезд перевозки тяжеловесных грузов, содержащий по меньшей мере первый тягач 1, механически соединенный со вторым тягачом 2. Механическое соединительное устройство 14 для соединения друг с другом тягачей 1, 2 предпочтительно образовано жесткой тягой или балкой, способной выдерживать высокие растягивающие усилия и критические усилия при продольном изгибе, которые могут возникать во время эксплуатации автопоезда. Например, при асинхронном переключении переда первого и второго тягачей 1, 2 на соединительное устройство 14 воздействуют попеременные растягивающие и сжимающие усилия.
Одной из важных особенностей изобретения является использование стандартных тягачей для формирования автопоезда согласно изобретению, при этом каждый тягач 1, 2 может по меньшей мере частично управляться водителем. За счет использования стандартных тягачей 1, 2 повышается экономичность и гибкость перевозки тяжеловесных грузов, поскольку не требуются дорогостоящие специально сконструированные или изготовленные автоприцепы, а доступ к дополнительному тягачу чаще всего является быстрым и простым. После выполнения задачи перевозки тяжеловесных грузов тягачи 1, 2 могут быть снова разделены, и затем их непосредственно готовят к выполнению других задач совместно или по отдельности.
Термин стандартный тягач или грузовой автомобиль означает автотранспортное средство, более точно, автомобиль для коммерческих перевозок, обычно используемый для перевозки товаров и материалов, при этом тягачи сконструированы и рассчитаны в основном на отдельное управление водителем. Следовательно, считается, что известный из уровня техники автоприцеп не представляет собой стандартный тягач. Стандартный тягач 1, 2 представляет собой отдельно управляемый тягач 1, 2 и содержит кабину 3, 3′ водителя, в которой находится водитель тягача, рулевые колеса 5, 5′, задние колеса 18, 18′ и заднюю часть 19, 19′ для соединения с прицепом. Как показано на фиг. 2, стандартный тягач 1, 2 дополнительно имеет тормозную систему 6, 6′ и силовую передачу, содержащую источник 7, 7′ энергии, фрикционное сцепление 8, 8′ и автоматическую трансмиссию 9, 9′. Фрикционное сцепление 8, 8′ способно выключаться или включаться с целью передачи крутящего момента на валу привода от источника 7, 7′ энергии автоматической трансмиссии 9, 9′.
Фрикционным сцеплением 8, 8′ предпочтительно является сухое фрикционное сцепление, но в качестве альтернативы также может являться фрикционное сцепление, работающее в масляной ванне. Фрикционное сцепление 8, 8′ предпочтительно является частью автоматической трансмиссии 9, 9′, также называемое автоматической ручной трансмиссией (АМТ), которая представляет собой систему с использованием электронных датчиков, пневматических устройств, процессоров и исполнительных механизмов для переключения передач по команде водителя или компьютера. Обычно в автоматической трансмиссии 9, 9′ предусмотрено автоматическое управление фрикционным сцеплением 8, 8′. Следовательно, тягач 1, 2 с автоматической трансмиссией обычно не имеет предназначенного для водителя исполнительного механизма сцепления, все переключения передач и включения сцепления выполняются исполнительными механизмами автоматической трансмиссии и управляются системой 11, 11′ управления.
Силовые передачи автомобилей генерируют крутящий момент на валу привода, который передается посредством цепи привода автомобиля для приведения его в движение. Обычно силовая передача содержит источник 7, 7′ энергии, включая без ограничения двигатель внутреннего сгорания и/или электрическую машину. Работа источника 7, 7′ энергии часто регулируется с использованием системы управления по крутящему моменту, в которой приведение водителем в действие педали 15, 15′ акселератора рассматривается как запрос 12, 12′ крутящего момента на валу привода, и источник 7, 7′ энергии регулируется с целью выполнения запроса 12, 12′ крутящего момента на валу привода. Приведение водителем в действие педали 16, 16′ тормоза рассматривается как запрос 13, 13′ замедления, и тормозная система 6, 6′, в частности, электронная тормозная система (EBS) управляет главным и вспомогательными тормозами с выполнения принятого запроса 13, 13′ замедления. На фиг. 2 проиллюстрированы только линии электронного управления между педалью 15, 15′ акселератора, педалью 16, 16′ тормоза, переключателем 17, 17′ режимов трансмиссии и системой 11, 11' управления. Не показанная пневматическая тормозная система обычно также является частью общей тормозной системы 6, 6′.
Каждый тягач 1, 2 дополнительно содержит устройство 4, 4′ цифровой связи для установления линии 10 цифровой связи между первым и вторым тягачами 1, 2. Линия 10 цифровой связи может представлять собой, например, линию беспроводной связи, такую как, например, беспроводная локальная сеть (WLAN), или может быть реализована путем соединения друг с другом шин CAN каждого тягача 1, 2 или посредством физических кабелей, трассированных посредством механического соединительного устройства 14, и т.п. Устройство 4 цифровой связи каждого тягача 1, 2, которое используется для установления линии 10 цифровой связи между первым и вторым тягачами 1, 2, необходимо, поскольку согласно изобретению система 11 управления первого тягача 1 рассчитана на регулирование по меньшей мере нагрузки как на фрикционное сцепление 8 первого тягача 1, так и на фрикционное сцепление 8′ второго тягача 2. Соответственно, система 11 управления первого тягача 1 приспособлена регулировать нагрузку на оба фрикционных сцепления 8, 8′. Основной задачей является снижение риска перегрева фрикционных сцеплений 8, 8′ первого и второго тягачей 1, 2 при их включении или выключении.
Предусмотрено, что направление рулевого управления, запрос 12 крутящего момента и запрос 13 замедления первого тягача 1 обеспечиваются водителем первого тягача 1. При управлении по меньшей мере источником 7′ энергии и фрикционным сцеплением 8′ посредством системы 11 управления первого тягача 1 предусмотрено, что водитель второго тягача 2 обеспечивает только направление рулевого управления и предпочтительно также ручное торможение второго тягача 2. Предусмотрено, что запрос 12′ крутящего момента и предпочтительно также запрос 13′ замедления второго тягача 2 обеспечиваются системой 11 управления первого тягача 1. Это проиллюстрировано на фиг.2 пунктирными линиями электронного управления между педалью 15′ акселератора, тормозной педалью 16′, переключателем 17′ режимов трансмиссии и системой 11′ управления.
Без такого синхронизированного регулирования нагрузки на фрикционные сцепления 8, 8′ тягачей 1, 2 автопоезда индивидуальные нагрузки на каждое фрикционное сцепление 8, 8′ будут, вероятнее всего, значительно различаться в зависимости от входных команд 12, 12′, 13, 13′, принимаемых от водителей тягачей 1, 2. Например, рассмотрим два взаимосвязанных тягача 1, 2 без синхронизированной нагрузки на сцепления. В этом случае водитель каждого тягача 1, 2 индивидуально регулирует нагрузки на сцепление каждого тягача 1, 2 посредством большего или меньшего запроса 12, 12′ крутящего момента. Соответственно, водитель первого тягача 1 может передавать запрос 12 максимального крутящего момента, а водитель второго тягача 2 может передавать запрос 12′ крутящего момента, составляющего 50% максимального крутящего момента. Эта ситуация может впоследствии быстро приводить к перегреву фрикционного сцепления 8 первого тягача 1.
Задачей изобретения является предотвращение такой неодинаковой нагрузки на фрикционные сцепления 8, 8′ путем регулирования также нагрузки на фрикционное сцепление 8′ второго тягача 2 посредством системы 11 управления первого тягача 1. Соответственно, в этом режиме водитель второго тягача 2 не может регулировать нагрузку на фрикционное сцепление 8′ второго тягача 2.
Нагрузка на сцепление определяется как функция крутящего момента М на входе сцепления и скорости ωslip пробуксовки сцепления, при этом нагрузка на сцепление равна M, умноженному на ωslip (нагрузка на сцепление = M×ωslip). Крутящий момент М на входе сцепления преимущественно соответствует крутящему моменту на выходе источника 7, 7′ энергии за вычетом возможных небольших потерь. Скорость ωslip пробуксовки сцепления определяется на основании частоты ωin вращения входного вала сцепления минус частота ωout вращения выходного вала сцепления (ωslip=ωin-ωout).
Соответственно, регулирование нагрузки на сцепление предусматривает управление исполнительным механизмом включения обоих фрикционных сцеплений, который регулирует способность фрикционных сцеплений 8, 8′ передавать крутящий момент и тем самым определяет скорость ωslip пробуксовки сцепления и крутящий момент M на входе сцепления, который преимущественно соответствует крутящему моменту на выходе источника 7, 7′ энергии. Система 11 управления первого тягача 1 управляет источником 7 энергии и фрикционным сцеплением 8 на основании запроса 12 крутящего момента водителем первого тягача 1. Соответственно, система 11 управления первого тягача 1 также регулирует нагрузку на сцепление фрикционного сцепления 8 первого тягача 1 в соответствии с данным выше определением нагрузки на сцепление. С целью обеспечения синхронизированной нагрузки на каждое фрикционное сцепление 8, 8′ автопоезда система 11 управления первого тягача 1 рассчитана на регулирование также нагрузки на фрикционное сцепление 8′ второго тягача 2. Это регулирование может осуществляться различными способами, один из которых проиллюстрирован на фиг. 2. В данном случае используется режим ведущий-ведомый, в котором система 11 управления первого тягача 1 действует как ведущий регулятор, а система 11′ управления второго тягача 2 действует как ведомый регулятор. Соответственно, система 11′ управления второго тягача 2 действует на основании выходных команд система управления 1 первого тягача 1, а не водителя второго тягача 2. Эта система обеспечивает эффективную синхронизацию нагрузки на сцепление каждого тягача 1, 2 и, соответственно, снижает риск перегрева и дальнейшего повреждения фрикционных сцеплений 7, 7′.
Следует отметить, что тягачи 1, 2 на фиг. 2 проиллюстрированы лишь схематически, и структура функциональных блоков на фиг. 2 может быть реализована множеством различных способов. Например, системы 11, 11′ управления могут состоять из нескольких различных в большей и меньшей степени взаимосвязанных блоков управления, которые в большей и меньшей степени связаны с одним из функциональных блоков. Функциональные блоки также могут быть в большей и меньшей степени объединены друг с другом. Фрикционное сцепление 8, 8′ и трансмиссия 9, 9′ могут быть выгодно объединены, например, в одном блоке в силу их тесной функциональной взаимосвязи. Система 11, 11′ управления может быть, главным образом связана, например, с блоком сцепления/трансмиссии, при этом система 11, 11′ управления дополнительно управляет источником 7, 7′ энергии посредством отдельного блока управления двигателем.
С целью повышения гибкости первый и второй тягачи 1, 2 различных типов и с различными компонентами силовой передачи могут быть соединены друг с другом в автопоезд согласно изобретению. В случае регулирования абсолютной нагрузки на сцепление система 11, 11′ управления рассчитана на регулирование нагрузки на сцепление в абсолютных величинах, таких как Дж/сек, абсолютные нагрузки на сцепления первого и второго тягачей 1, 2 не должны различаться более, чем на определенную величину, предпочтительно должны являться преимущественно одинаковыми. Тем не менее, при объединении двух или более тягачей 1, 2 с неодинаковыми силовыми передачами при регулировании абсолютной нагрузки на сцепление может снижаться уровень синхронизации, в частности, при объединении более мощного тягача 1, 2 с менее мощным тягачом 1, 2. Во избежание такого снижения уровня синхронизации система 11 управления первого тягача 1 может быть рассчитана на регулирование относительной нагрузки на сцепление вместо абсолютной нагрузки на сцепление, при этом относительная нагрузка на фрикционные сцепления 8, 8′ не должна различаться более, чем на определенную величину. Относительная нагрузка на сцепление предпочтительно выражается в процентах от 0 до 100%, при этом 100% соответствуют максимальной абсолютной передаваемой нагрузке на каждое конкретное фрикционное сцепление 8, 8′.
Система 11 управления первого тягача 1 сконфигурирована на обеспечение того, чтобы абсолютная или относительная нагрузки на каждое фрикционное сцепление 8, 8′ различались не более, чем на определенную величину. Степень различия может выражаться в процентах нагрузки на сцепление или в абсолютной нагрузке на сцепление и т.п. Например, система 11 управления первого тягача 1 сконфигурирована на обеспечение того, чтобы абсолютная или относительная нагрузки на каждое фрикционное сцепление 8, 8′ различались не более, чем на 30%, предпочтительно менее, чем на 20%, более предпочтительно менее, чем на 10%. Система 11 управления первого тягача 1 наиболее предпочтительно сконфигурирована на обеспечение того, чтобы абсолютная или относительная нагрузка на каждое фрикционное сцепление 8, 8′ была преимущественно одинаковой.
Система 11 управления первого тягача 1 сконфигурирована на регулирование не только уровня мгновенной нагрузки на сцепление, но также уровня энергии Е фрикционных сцеплений 8, 8′ тягачей 1, 2. Уровень энергии Е каждого фрикционного сцепления 8, 8′ определяется как уровень мгновенной нагрузки на сцепление, умноженный на время tslip пробуксовки сцепления, т.е. E = нагрузка на сцепление × tslip. С учетом также времени 8, 8′ пробуксовки каждого фрикционного сцепления 8, 8′ автопоезда может обеспечиваться более точная синхронизация фрикционного сцепления и дополнительно снижаться риск перегрева фрикционных сцеплений 8, 8′. Если система управления 11 первого тягача 1 впоследствии также учитывает индивидуальную скорость рассеяния мощности каждого фрикционного сцепления 8, 8′ при регулировании нагрузки на каждое фрикционное сцепление 8, 8′, скорость рассеяние может сохраняться и обновляться индивидуальный уровень энергии E каждого фрикционного сцепления 8, 8′. Эта конкретная система может быть выгодной, когда осуществляется несколько последовательно троганий автопоезда с места, между которыми уровень энергии E фрикционных сцеплений 8, 8′ остается на повышенном уровне. Индивидуальная скорость рассеяния мощности фрикционного сцепления 8, 8′ зависит от того, насколько фрикционное сцепление 8, 8′ способно передавать тепловую энергию окружающей среде. Система управления 11 первого тягача 1 предпочтительно учитывает индивидуальный верхний предельный уровень энергии Elimit каждого фрикционного сцепления 8, 8′ при регулировании нагрузки на каждое фрикционное сцепление 8, 8′ во избежание риска его повреждения или перегрева при включении или выключении.
Система управления 11 первого тягача 1 дополнительно сконфигурирована на синхронизацию крутящих моментов на валу привода каждого из тягачей 1, 2 с целью уменьшения пробуксовки колес какого-либо из тягачей 1, 2 и распределения общего крутящего момента на валу привода автопоезда между отдельными тягачами 1, 2. Относительные крутящие моменты на валу привода синхронизируются, чтобы позволить эффективно объединять тягачи 1, 2 с различными характеристиками силовой передачи. Разумеется, что в случае асинхронных переключений передач в тягачах 1, 2 синхронизация крутящих моментов на валу привода возможна только между фазами переключений передач.
Система управления 11 первого тягача 1 дополнительно сконфигурирована также на регулирование режима автоматической трансмиссии 9, 9′ каждого из тягачей 1, 2. Каждая автоматическая трансмиссия 9, 9′ иметь несколько различных режимов, приспособленных к различным условиям, таким как перевозка тяжеловесных грузов, полностью загруженный автомобиль, порожний автомобиль, снегопад, экономичная работа и т.д., и водитель первого тягача 1 выбирает желательный режим работы посредством переключателя 17 режимов трансмиссии, который размещается в кабине 3 первого тягача 1. Каждый режим трансмиссии предусматривает выбор особой передачи для трогания с места, соответствующих последовательностей переключения передач, частоты вращения двигателя и крутящего момента, инициирующего переключения передача, и т.д. Следовательно, каждая автоматическая трансмиссия 9, 9′, управляемая системой 11 управления первого тягача 1, по возможности действует в одном и том же режиме.
Система 11 управления первого тягача 1 дополнительно сконфигурирована на управление тормозной системой 6, 6′ каждого из тягачей 1, 2 с целью выравнивания тормозной нагрузки между тягачами 1, 2. Это относится, в частности, к главному фрикционному тормозу каждого тягача 1, 2 и имеет целью предотвращать перегрев фрикционного тормоза одного тягача 1, 2 в то время, как фрикционный тормоз другого тягача 1, 2 далек от перегрева. Кроме того, также предпочтительно синхронизируются тормоза-замедлители и/или моторные тормоза-замедлители с целью улучшенного распределения степени износа и нагрева вследствие замедления под действием аномальной нагрузки. Ручное торможение и рулевое управление второго тягача 2 могут оставаться под контролем водителя второго тягача 2, что дает его водителю возможность осуществлять некоторое управляющее воздействие в случае системной ошибки. В качестве альтернативы или в сочетании с этим, работа автопоезда в режиме ведущий-ведомый может прерываться по соображениям безопасности путем приведения водителем в действие средств управления, таких как педаль 15′ акселератора и тормозная педаль 16′ второго тягача 2.
Одной из выгод регулирования нагрузок на оба сцепления и автоматических трансмиссий системой 11 управления одного тягача 1 является возможность асинхронного переключения передач автоматических трансмиссий 9, 9′ тягачей 1, 2. За счет такого асинхронного переключения передач по меньшей мере один тягач 1, 2 всегда приводит в движение автопоезд во время фаз переключений передач другого тягача 1, 2 автопоезда, и тем самым осуществляется силовое переключение передач, что повышает комфорт для водителя, и обеспечивается более непрерывный крутящий момент на валу привода автопоезда.
Компоновка и эксплуатация автопоезд предпочтительно осуществляется следующим образом. Располагают первый и второй отдельно управляемые тягачи 1, 2 на одной линии и соединяют их друг с другом механическим соединительным устройством 14, приспособленным передавать значительные растягивающие и сжимающие усилия. Устанавливают линию 10 цифровой связи между тягачами 1, 2 с помощью устройств 4, 4′ цифровой связи. Устанавливают режим ведущий-ведомый, в котором система 11 управления первого тягача 1 сконфигурирована на регулирование по меньшей мере нагрузки на фрикционное сцепление 8, 8′ первого и второго тягачей 1, 2 и тем самым снижение риска перегрева фрикционных сцеплений 8, 8′ при их включении или выключении. Кроме того, также предпочтительно конфигурируют систему 11 управления первого тягача 1 на управление тормозной системой 6, 6′, а также режимом автоматических трансмиссий обоих тягачей 1, 2. При трогании с места система 11 управления первого тягача 1 принимает запрос 12 крутящего момента от водителя первого тягача 1, на основании которого управляет источником 7, 7′ энергии, фрикционным сцеплением 8, 8′ и автоматической трансмиссией 9, 9′ обоих тягачей 1, 2 таким образом, чтобы во время включения фрикционных сцеплений 8, 8′ нагрузка на фрикционное сцепление 8 первого тягача 1 отличалась от нагрузки на фрикционное сцепление 8′ второго тягача 2 не более, чем на определенную величину. В режиме ведущий-ведомый водитель второго тягача 2 осуществляет рулевое управление вторым тягачом 2, но не его силовой передачей.
После того, как автопоезд достигает скорости, при которой система 11 управления первого тягача 1 инициирует переключение передачи, приостанавливается крутящий момент на валу привода только одного из тягачей 1, 2, выполняется переключение передачи, и снова включается соответствующее фрикционное сцепление 8, 8′ с целью обеспечения автопоезда крутящим моментом на валу привода. Вскоре после этого такая же процедура выполняется в другом тягаче 1, 2. За счет асинхронного переключения передач осуществляется силовое переключение передач, что повышает комфорт для водителя, увеличивает экономию топлива и улучшает ездовые характеристики. В случае приема системой 11 управления первого тягача 1 запроса 13 замедления от водителя система 11 управления первого тягача 1 оказывает управляющее воздействие по меньшей мере на главный фрикционный тормоз тормозной системы 6, 6′ первого и второго тягачей 1, 2 с тем, чтобы обеспечить эффективное, преимущественно равномерно распределенное и безопасное замедление автопоезда. Используемый термин ведущий-ведомый означает режим управления, в котором система 11 управления первого тягача 1 берет на себя управления несколькими функциями второго тягача 2. Система 11 управления первого тягача 1 может, например, передавать команды системе 11′ управления второго тягача 2 с тем, чтобы водитель второго тягача 2 не имел возможности управлять, например, источником 7′ энергии, фрикционным сцеплением 8′ и автоматической трансмиссией 9′.
Используемый термин тягач означает главным образом грузовой автомобиль с полуприцепом, сконфигурированный на то, чтобы тянуть полуприцеп посредством соединительного механизма быстрого расцепления в задней части тягача. Если прицепом, используемым для перевозки тяжеловесных грузов, является полный прицеп, имеющий передние колеса, термин также может означать автомобили для коммерческих перевозок других типов, способные тянуть такой прицеп для перевозки тяжеловесных грузов.
Ссылочные обозначения в формуле изобретения не следует считать ограничивающими объем объекта, охраняемого формулой изобретения, и их единственным назначением является облегчение понимания формулы изобретения.
Очевидно, что в изобретение могут быть внесены различные очевидные модификации, во всех случаях в пределах объема прилагаемой формулы изобретения. Соответственно, чертежи и их описание следует считать иллюстративными по природе, а не ограничивающими изобретение.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД КОЛЕС ПОЛУПРИЦЕПА АКТИВНОГО АВТОПОЕЗДА | 1999 |
|
RU2167779C1 |
| СИСТЕМА И СПОСОБ ЭКСПЛУАТАЦИИ ДВИГАТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2562289C2 |
| АВТОПОЕЗД | 2012 |
|
RU2539702C2 |
| Трансмиссия активного автопоезда | 2020 |
|
RU2736189C1 |
| Гидрообъемно-механическая трансмиссия тяжеловозного транспортного средства | 2016 |
|
RU2613143C1 |
| СПОСОБ ЭКСПЛУАТАЦИИ СИЛОВОГО АГРЕГАТА ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2569212C1 |
| СПОСОБ ЭФФЕКТИВНОГО ТОРМОЖЕНИЯ АВТОПОЕЗДА С ТЯГАЧОМ, ОСНАЩЕННЫМ ГИДРАВЛИЧЕСКИМ ПРИВОДОМ ТОРМОЗОВ | 2005 |
|
RU2291081C1 |
| ДВИГАТЕЛЬ САМОХОДНОЙ МАШИНЫ | 2010 |
|
RU2450135C2 |
| СПОСОБ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ И УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2015 |
|
RU2673306C1 |
| СПОСОБ РАБОТЫ СИЛОВОЙ ПЕРЕДАЧИ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) И СИСТЕМА УПРАВЛЕНИЯ ДВИГАТЕЛЕМ | 2013 |
|
RU2573537C2 |

Группа изобретений относится к составному транспортному средству для перевозки тяжеловесных грузов. Составное транспортное средство для перевозки тяжеловесных грузов содержит первый тягач (1), механически соединенный со вторым тягачом (2). Каждый тягач (1, 2) представляет собой отдельно управляемый тягач (1, 2), имеющий кабину (3, 3′) водителя, устройство (4) цифровой связи, рулевые колеса (5, 5′), тормозную систему (6, 6′) и силовую передачу, содержащую источник (7, 7′) энергии, фрикционное сцепление (8, 8′) и автоматическую трансмиссию (9, 9′). Фрикционное сцепление (8, 8′) выполнено для включения и выключения с целью передачи приводного крутящего момента от источника (7, 7′) энергии к автоматической трансмиссии (9, 9′), а между тягачами (1, 2) посредством устройств (4, 4′) цифровой связи обеспечена линия (10) цифровой связи. Система (11) управления первого тягача (1) выполнена с возможностью управления нагрузкой на фрикционное сцепление (8, 8′) каждого из первого и второго тягачей (1, 2) с целью снижения риска перегрева какого-либо из фрикционных сцеплений (8, 8′) при их включении или выключении. Достигается усовершенствование автопоезда для перевозки тяжеловесных грузов. 2 н. и 12 з.п. ф-лы, 2 ил.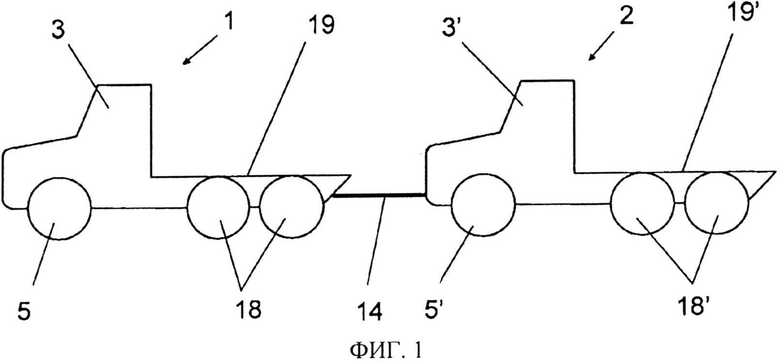
1. Составное транспортное средство для перевозки тяжеловесных грузов, содержащее по меньшей мере первый тягач (1), механически соединенный со вторым тягачом (2), отличающееся тем, что каждый тягач (1, 2) представляет собой отдельно управляемый тягач (1, 2), имеющий кабину (3, 3′) водителя, устройство (4) цифровой связи, рулевые колеса (5, 5′), тормозную систему (6, 6′) и силовую передачу, содержащую источник (7, 7′) энергии, фрикционное сцепление (8, 8′) и автоматическую трансмиссию (9, 9′), при этом фрикционное сцепление (8, 8′) выполнено для включения и выключения с целью передачи приводного крутящего момента от источника (7, 7′) энергии к автоматической трансмиссии (9, 9′), а между тягачами (1, 2) посредством устройств (4, 4′) цифровой связи обеспечена линия (10) цифровой связи, и система (11) управления первого тягача (1) выполнена с возможностью управления по меньшей мере нагрузкой на фрикционное сцепление (8, 8′) каждого из первого и второго тягачей (1, 2) с целью снижения риска перегрева какого-либо из фрикционных сцеплений (8, 8′) при их включении или выключении.
2. Составное транспортное средство по п. 1, отличающееся тем, что система (11) управления первого тягача (1) рассчитана на управление фрикционным сцеплением (8, 8′) каждого из тягачей (1, 2) таким образом, чтобы относительная нагрузка на фрикционное сцепление (8) первого тягача (1) отличалась от относительной нагрузки на фрикционное сцепление (8′) второго тягача (2) не более чем на определенную величину.
3. Составное транспортное средство по любому из предшествующих пунктов, отличающееся тем, что система (11) управления первого тягача (1) дополнительно рассчитана на синхронизацию относительных приводных крутящих моментов каждого из тягачей (1, 2) по меньшей мере между фазами переключений передач.
4. Составное транспортное средство по п. 1, отличающееся тем, что система (11) управления первого тягача (1) дополнительно рассчитана на регулирование режима автоматической трансмиссии (9, 9′) каждого из тягачей (1, 2).
5. Составное транспортное средство по п. 1, отличающееся тем, что система (11) управления первого тягача (1) дополнительно рассчитана на управление тормозной системой (6, 6′) каждого из тягачей (1, 2) с целью выравнивания тормозной нагрузки каждого из тягачей (1, 2).
6. Составное транспортное средство по п. 1, отличающееся тем, что система (11) управления первого тягача (1) дополнительно рассчитана на асинхронное переключение передач автоматической трансмиссии (9, 9′) каждого из тягачей (1, 2) таким образом, чтобы по меньшей мере один тягач (1, 2) приводил в движение автопоезд во время фаз переключений передач другого тягача (1, 2).
7. Составное транспортное средство по п. 1, отличающееся тем, что оно предназначено для работы в режиме ведущий-ведомый, в котором второй тягач (2) подчиняется выходным командам системы (11) управления первого тягача (1).
8. Составное транспортное средство по п. 1, отличающееся тем, что система управления (11) первого тягача (1) дополнительно рассчитана на регулирование по меньшей мере уровня энергии (E) фрикционного сцепления (8, 8′) каждого из первого и второго тягачей (1, 2) с учетом также времени (tslip) пробуксовки сцепления каждого фрикционного сцепления (8, 8′) с целью снижения риска перегрева какого-либо из фрикционных сцеплений (8, 8′).
9. Составное транспортное средство по п. 8, отличающееся тем, что система (11) управления первого тягача (1) учитывает индивидуальный верхний предельный уровень энергии (Elimit) каждого из фрикционных сцеплений (8, 8′) при регулировании нагрузки на каждое фрикционное сцепление (8, 8′).
10. Составное транспортное средство по любому из пп. 8 или 9, отличающееся тем, что система (11) управления первого тягача (1) учитывает индивидуальную скорость рассеяния мощности каждого фрикционного сцепления (8, 8′) при регулировании нагрузки на каждое фрикционное сцепление (8, 8′).
11. Составное транспортное средство по п. 1, отличающееся тем, что направление рулевого управления, запрос (12) крутящего момента и запрос (13) замедления первого тягача (1) обеспечиваются водителем первого тягача (1), а направление рулевого управления и предпочтительно также ручное торможение второго тягача (2) обеспечиваются водителем второго тягача (2).
12. Способ эксплуатации составного транспортного средства для перевозки тяжеловесных грузов, содержащего по меньшей мере первый тягач (1), механически соединенный со вторым тягачом (2), отличающийся тем, в котором:
обеспечивают каждый тягач (1, 2) в качестве отдельно управляемого тягача (1, 2), содержащего по меньшей мере кабину (3, 3′) водителя, устройство (4, 4′) цифровой связи, рулевые колеса (5, 5′), тормозную систему (6, 6′) и силовую передачу, содержащую источник (7, 7′) энергии, фрикционное сцепление (8, 8′) и автоматическую трансмиссию (9, 9′), при этом фрикционное сцепление (8, 8′) выполнено для включения и выключения с целью передачи крутящего момента на валу привода от источника (7, 7′) энергии автоматической трансмиссии (9, 9′);
обеспечивают линию (10) цифровой связи между тягачами (1, 2) посредством устройств (4, 4′) цифровой связи; и
осуществляют регулирование по меньшей мере нагрузки на фрикционное сцепление (8, 8′) каждого из первого и второго тягачей (1, 2) посредством системы (11) управления первого тягача (1) с целью снижения риска перегрева какого-либо из фрикционных сцеплений (8, 8′) при их включении или выключении.
13. Способ по п. 12, отличающийся тем, что он включает дополнительную стадию регулирования фрикционного сцепления (8, 8′) каждого из тягачей (1, 2) таким образом, чтобы относительные нагрузки на каждое фрикционное сцепление (8, 8′) различались не более чем на определенную величину.
14. Способ по любому из пп. 12 или 13, отличающийся тем, что включает дополнительную стадию поддержания постоянного приводного крутящего момента по меньшей мере одного из тягачей (1, 2) во время фаз переключений передач другого из тягачей (1, 2) с тем, чтобы составное транспортное средство всегда обеспечивалось тяговой мощностью после приема запроса (12) крутящего момента от водителя первого тягача (1).
| ЛИНЗОВЫЙ ОБЪЕКТИВ ДЛЯ ИНФРАКРАСНОЙ ОБЛАСТИ СПЕКТРА | 0 |
|
SU277305A1 |
| DE 4324211 A1, 26.01.1995 | |||
| AU 2002350555 B2, 07.06.2007 | |||
| US 2001003393 A1, 14.06.2001 | |||
| US 2004226760 A1, 18.11.2004 | |||

