Изобретение относится к двигателям, самоходным машинам, их трансмиссиям, движителям и способам движения над землей, может быть использовано для автоматического и адаптивного управления климато-, энерго-, металло-, человеко-, ресурсосберегающих технологий и техники.
Известны машины и их механические силовые передачи для адаптивного регулирования скорости, силы тяги, нагрузки двигателя /АС №1079477 А, 1092061 А, 1294646 A1, B60K/.
Недостатками известных машин и их силовых передач являются низкий КПД, высокая металлоемкость и зависимость от вязкости масла, температуры и условий местности.
Цель изобретения - повышение КПД, адаптивной управляемости и снижение металлоемкости.
Научной основой предлагаемого способа движения, самой машины и ее силовой передачи /трансмиссии/ мощности к потребителям является минимизация вращения - передача мощности пульсирующим потоком, замена деталей вращения /множества валов, шестерен/ деталями передачи энергии натяжением нити, каната, троса, тяги с возможностью широкого регулирования сил и скоростей /передаточного числа/ для автоматического адаптивного управления движением и технологическим процессом обработки земли и других материалов.
Цель достигается передачей силы импульсами с возможностью прерывания, плавного регулирования с учетом требований рабочего процесса, полезности вибрации рабочих органов и полезности эластичного привода и распределения сил с учетом реакций, курса. Двигатель содержит чашки и диски на поршнях, и штоки нитью и храповиками соединены с потребителями энергии.
Двигатель соединен с рабочими органами и движителями импульсной передачей и преобразователями сил растяжения в перемещение рабочих органов и вращение движителей с возможностью адаптивного управления курсом, скоростью и положением. Рабочие органы-потребители и источники силы преобразуют сопротивление в силу самозащиты от перегрузки и камней, а также для работы в режиме полуагроробота, применительно к внешним условиям. Движители бортов адаптивно взаимодействуют гибкой тягой повышения адаптивности к местности.
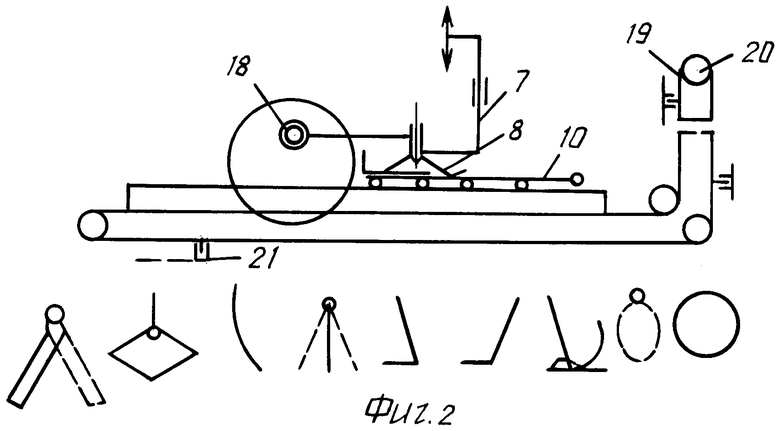
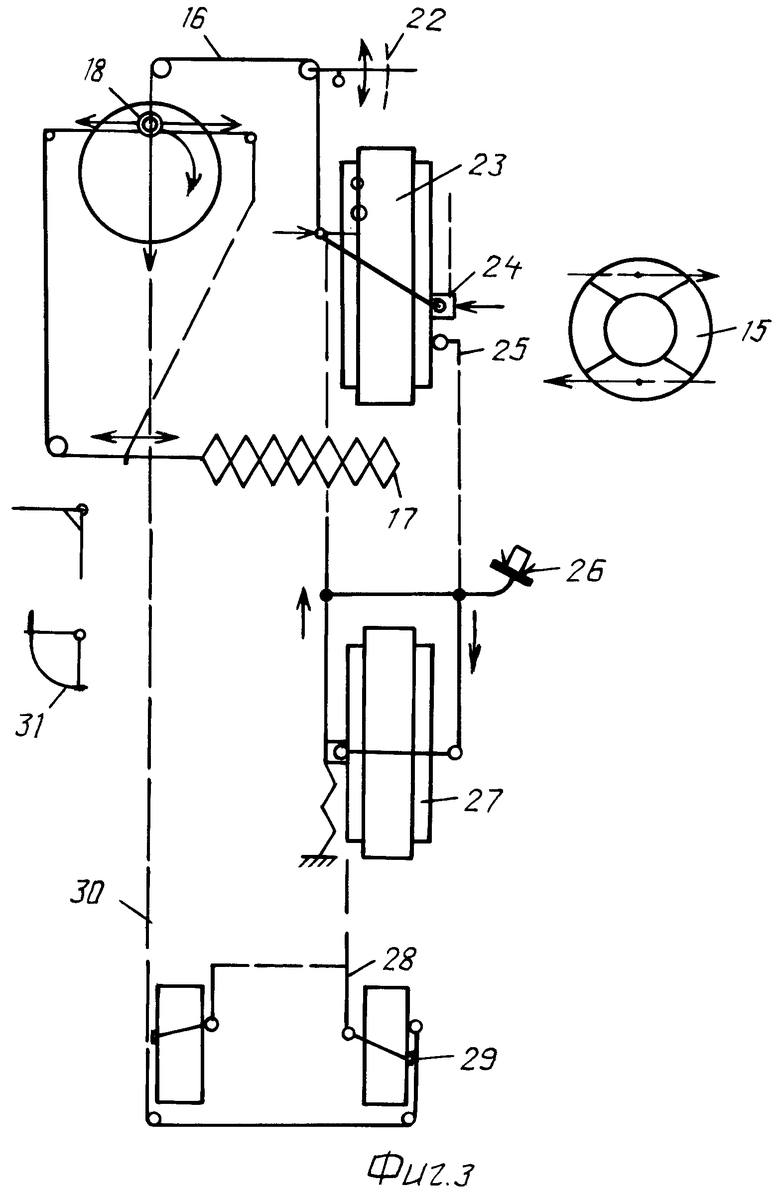
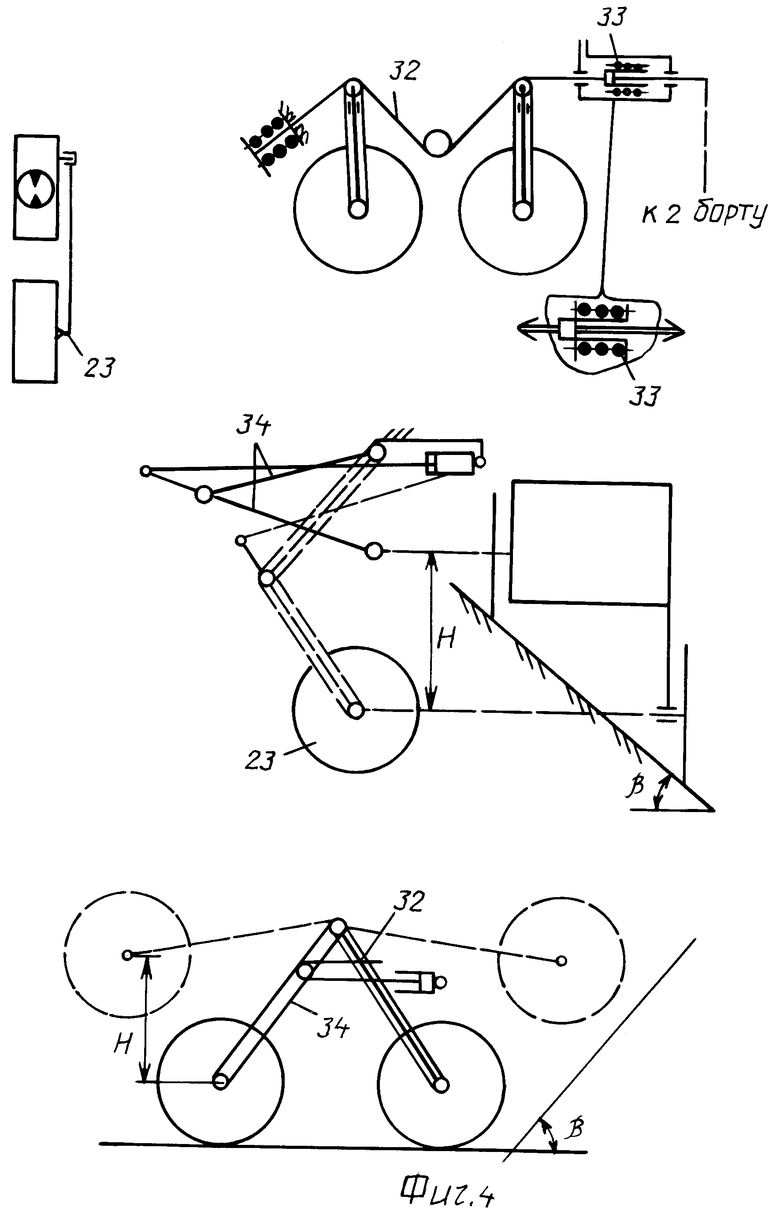
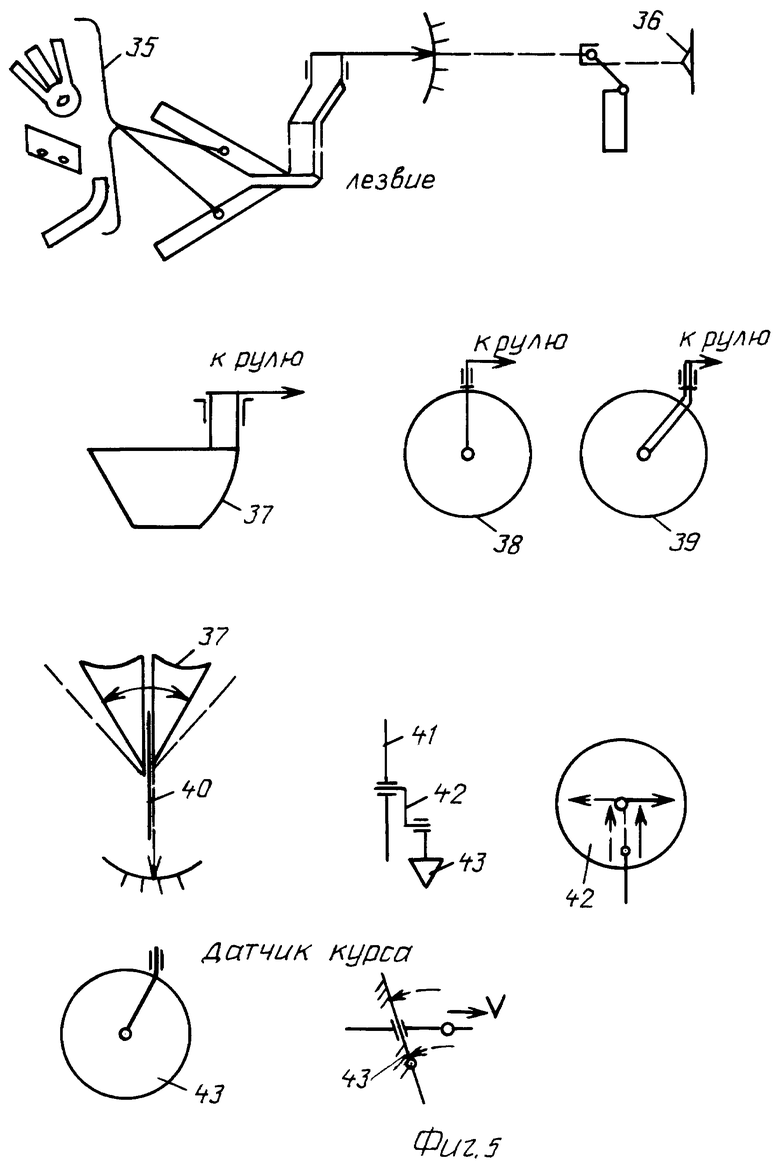
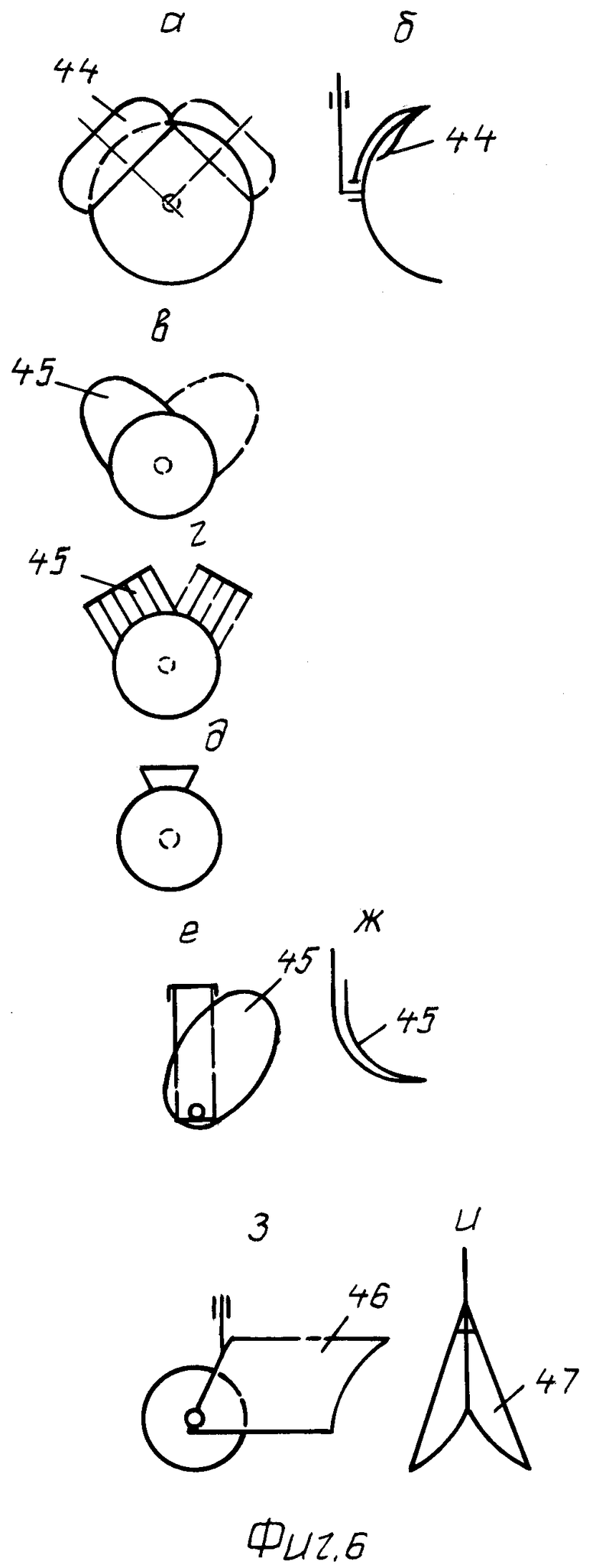
В графической части на фиг.1 изображена схема импульсной передачи силы от поршней к рабочим органам и движителям нитью, тросом, канатом к рычагам и храповикам или муфтам свободного хода, на фиг.2 - схема передачи силы от эксцентричной оси вала двигателя к потребителям - рабочим органам продольного и поперечного хода, на фиг.3 - схема отбора силы от эксцентрика в четыре стороны для привода рабочих органов и движителей одной нитью или двумя, на фиг.4 - схема гибкой связи колес и бортов для адаптации машины к неровностям и горной местности, на фиг.5 - схемы рулевых и самозащитных рабочих органов, шагающее движение которых повышает адаптивность машины к условиям работы, на фиг.6 - схемы рабочих органов с диском, маятником и антимаятником адаптивного действия, обкатывания камня.
Двигатель содержит в цилиндрах 1 /фиг.1/ поршни 2 с чашками 3 и дисками 4 /кольцами/ уплотнения на штоке 5, связанном с рычагами 6 и регулятором 7 соотношений плеч /передаточного числа/. Шток упорами разгружен от боковых сил, а поршни от перекладки.
Храповики 8 поочередного действия или реверсивный храповик прямого и обратного действия установлены на рычагах с возможностью отключения /включения/ выключателями 9 перемещения рейки 10 с рабочими органами или вращать рычагом 11 зубчатку 12 колеса аналогично муфте и дифференциалу свободного хода /обгонной муфте/. Рычаг 13 включения храповиков 14 привода зубчатки 15 колеса от нити 16 или привода ножей 17 косилок, использования сил - импульсов для выполнения различных работ.
В другом варианте отбора силы от оси 18 /фиг.2/ канат 19 или трос, нить огибает шкивы 20 и может перемещать секции 21 рабочих органов /лап, плуга, лопаты, зубьев, плоскорезов с наклоном стойки вперед или назад или носком, отогнутым кверху, граблин, дисков и т.д/. В каждом случае отбора мощности от поршней или от вала сила передается через шкив рычага 22 регулирования натяжения к обгонной муфте колеса 23, тяги 24, связи 25 с педалью 26 управления колодками 27 и нитью 28 тормозами 29. Нить 30 замыкает поток энергии иногда через рычаги 31 или секторы. Нить 32 /трос, канат/ на фиг.4 соединяет колеса и их оси с упругостью 33 /рессорой/ для двух бортов. Колена 34 могут перемещать колеса бортов и обеспечить выравнивание рамы и колес для движения поперек склона, как это показано на фиг.4.
Векторные рабочие органы - датчики курса и самоустанавливающиеся указатели направления движения и отклонения от целевой траектории содержат сменные отвалы 35 /фиг.5/ и связь с рулем 36 для формирования траектории по команде автоводителя и водителя. Окучник 37 бороздорез-плуг, окучник и др. рабочие органы имеют 38, 39, 40 диски защиты курса обкатыванием камней и корней. Шагающее колесо 41 или диск на кривошипе 42 с упором 43 самоповорота или самоподъема могут дать сигнал о сцеплении, преобразовать колебания и создать реакцию /тормозить отход назад/ и утилизировать энергию колебания рамы или передать колебания рабочим органам. Диск 43 поворотом может стать якорем при шагающем движении.
Рабочие органы с диском /фиг.6/ крылом 44 или 45, или 46 реверсивного типа могут самоповорачиваться сопротивлением почвы, обладают свойством антимаятника. Диск с отвалами /фиг.6, з/ может работать в качестве плуга, бороздореза, окучника. Отвал или крыло-антимаятник допускают работу в качестве оборотного плуга, шагающего вдоль и поперек рабочего органа в ведущем и тормозном режимах. Работа отвалов поочередно в ведущем и тормозном режимах допускает настройку на работу двумя отвалами одновременно при нарезке борозд, окучивании и культивации на желаемую глубину по настройке.
На фиг.6а, б, в, г, д, е, ж, з, и отвалы и крылья-антимаятники имеют ось поворота /качения/, расположенную ниже центра тяжести и центра сопротивления так, чтобы после заглубления сопротивление материала могло повернуть между ограничителями, как и сами рабочие органы и их секции.
Машина работает следующим образом.
Импульсы сил поршней 2 /фиг.1, 2/ или оси 18 передаются рабочим органам или колесам храповиками 8 от нити 16, рейки 10 и рычага 22 включения импульсной передачи путем натяжения нити. Ослабление нити 16 рычагом 22 выключает передачу. Нить 16 с пружиной на конце может передать силу, но замкнутый контур нити 16 рычагами 11 передает силу без вращающихся деталей трансмиссии. Двигатель двух- или четырехтактного типа формирует на поршнях 2 и штоках 5 импульсы сил. Прямолинейное перемещение поршней 2 с чашками 3 и кольцами или дисками 4 снижает износ, компенсирует его, исключает боковые силы - повышает ресурс двигателя. Двигатель без шатунов и коленчатого вала снижает металлоемкость, износ и потери энергии, передает импульсы рабочим органам и дает эффект виброобработки.
Пульсирующая передача энергии работает аналогично известным механическим выпрямителям и отличается от электро- и гидропередач отсутствием двойного преобразования мощности и потерь энергии, а от механических передач заменой вращения валов и шестерен растяжением нити, многократным снижением массы и потерь энергии и применением вибраций /колебаний/ сил для эффективной обработки земли. Перемещением рычагов - точек крепления нити и храповиков изменяется передаточное число - сила и скорость. Ослабление нити размыкает поток мощности, например, рычагом 22 /фиг.3/. Сепаратор отделяет храповики от зубьев привода колес или от рейки привода рабочих органов. Плавное перемещение сепаратора между храповиками и зубьями соответственно плавно регулирует скорость движения. В итоге передаточное число регулируется натяжением нитей и рабочим ходом храповиков. Передача импульсов сил давления газов двигателя рабочим органам и движителям без шатунов, коленчатого вала, сложнейшей трансмиссии упрощает конструкцию, управление, использование без смазочных жидкостей в любое время года. Передается мощность двигателя к ходовой системе и рабочим органам трактора, автомобиля, комбайна и других уборочных машин.
Совмещение приводов колес и тормозов повышает безопасность работы скоростной машины, а сочетание функций ходовой системы и рабочих органов векторного действия повышает управляемость.
Поворот машины осуществляется изменением разностей сил и скоростей бортов, ослаблением и усилением натяжений бортов, поворотом колес, рабочими органами, тормозами в конечном итоге.
Гибкая нить, канат - тело растяжения легко изменяет направление, облегчает доступ к удаленным и многоприводным потребителям, прицепам, рабочим органам, средствам роботизации.
Машина - склоноход - полуробот применительно к внешним условиям копирует неровности поверхности перемещением колес за счет гибкости троса 32 /фиг.4/ и упругости пружин на его концах. Установка гидроцилиндра 33 и межбортовая связь колен 34 гарантируют взаимно-противоположное перемещение колес, выравнивание рамы и колес на склонах большой крутизны. Это зависит от высоты Н и ширины колеи. Возможен привод колеса от другого колеса с гидромотором.
Транспортное движение на склонах с такой системой стабилизации положения колес и рамы требует и копирования рабочими органами поверхности поля. Поэтому ведущие и шагающие рабочие органы передней навески со своими колесами-ограничителями глубины копируют поверхность и подают упреждающий сигнал для выравнивания рамы. Такой сигнал может подать водитель на поворотном сидении аналогично действиям мотоциклиста при повороте в конце кона. После поворота такое управление блокируется фиксатором, и безопасность резервируется. Замена колес дисками или передачей боковых сил раме устраняет и боковое сползание.
Рабочие органы в шагающем режиме поочередно шагают вперед и удерживают других за счет большого сопротивления отходу назад. Этому способствуют списки 39, упоры 43 и машины задней навески, тормоза колес. Такой режим шагания прицепов облегчает работу автопоездов на подъемах, при плохом сцеплении колес с дорогой и недостаточном сцепном весе тягача. В этом режиме динамический фактор машины возрастает пропорционально весу прицепов к груза.
Во всех режимах согласование сопротивлений и сил с курсом повышает адаптивность, экономичность и безопасность.
Управляемость и целевая проходимость зависят от опор, сил и геометрии, высоты приемника сигнала, числа координат, крена, запаздываний действий, усилителя, инертности, обратной связи, радиуса поворота, радиуса и скорости поворота, увода, плоскости координат. Ошибка Глонасс превышает допуск по отклонению многократно и опасно для любой мобильной техники.
Две координаты снижают опасность и зависят от скорости и плоскости. Машины на земле и воздухе более опасны по навигации, чем на воде. Запаздывание остановки, инертность в воздухе и воде влияет больше.
Человек и машина остро требуют потенциала надежности по быстродействию и соблюдению соотношений скоростей движения и поворота, управления и исполнения. В каждом случае снижение массы, скорости, запаздывания из-за влияния вращающихся масс повышает безопасность. Потребность в ее потенциале велика. Импульсы сил снижают опасность вращающихся деталей и гироскопичности.
Благоприятное сочетание курса, выравнивания рамы, слитности проходов, снижения высоты, устойчивости достигнуто тяговой нитевой, малоинертной импульсной передачей к движителям и рабочим органам их реверсивной передачей и работой без буксования и махового момента.
Саморегуляция сопротивления, преобразование технологического сопротивления в движущую в нужном направлении / кибернетическую и защитную силы для управления курсом до создания потенциала устойчивости для формирования траектории и нагрузки.
Спелость, зрелость почвы снижает кратность ее обработки, повышает адаптивность к растениям. С учетом их связей повышается уровень потенциала функций и их связей. Силы повышают уровень.
Технология - широту возможностей техники нельзя отрывать от явлений снижения плодородия на склоне и дополнения у подножия горы. Эффекты: холодоспелости, регулирования спелости, использования биоспелости шагающими средствами, малоэнергозатратности и ресурсосбережения прокатом деталей высокой готовности притирочного действия, экономичное конвертирование машин и решение проблем универсализации и специализации.
Суммирование ходов поршней с учетом направления, аналогично электроэнергии, замещает множество видов привода, легко автоматизирует скоростно-силовое управление /соотношением плеч-рычагов/, а в поле еще изменение сопротивления /глубины/ почвообработки/.
Площадь сдвига и перекос оси трехзвенного /двух осей и рабочих органов/ агрегата, каждое звено которого требует двухкоординатного управления, при изменении направления крена на склоне удваивает нарушение слитности проходов. Поэтому об автовождении таких агрегатов при однокоординатном управлении и удержании ведущей оси дисками противосползания говорить нельзя /сдвиг рабочих органов достигает 20 допусков/. Это исключает междурядную обработку. Технологическая динамика и управление потенциалом устойчивости дает эффект очувствления и совмещения функций рабочих органов - эффект рулевого и силового безопасного предотвращения ошибок и их отработок.
Ввиду того, что уборка кормов без обработки земли и совмещение операций кошения и сгребания снижает число проходов, слежение за слитностью проходов имеет эколого-экономическое значение. Изменение степени сжатия - адаптация к топливу повышает экологичность двигателя и машины.
Желаемое передаточное число получают, плавно перемещая точки связи рычагов, нитей и храповиков.
Плавное регулирование скорости V разности скоростей бортов ΔV, ширины колеи В, радиуса поворота R=BV/ΔV облегчает копирование базовой линии слитности проходов рабочих органов. На склонах содействие рабочих органов создает потенциал устойчивости и энергосбережения.
Конвертируемость приводов и функций открывает неограниченные возможности. Нить и рычаги изменения передаточного числа в широких пределах заменяют функции муфты сцепления, коробки передач, реверс-редуктора, ходоуменьшителя, главной, карданной и бортовой передач, дифференциала, блокировочного механизма, делителя энергии между колесами с учетом реакций и курса.
Замена деталей вращения нитево-рычажно-храповым приводом с возможностью широкого регулирования передаточного числа для адаптивного управления движением и технологическим процессом обработки земли и других материалов создает условия для роботизации.
Двигатель соединен с потребителями энергии импульсной передачей в виде нити, протянутой между рычагами связи источника к потребителя силы. Рычаг с храповиком - преобразователь импульса силы во вращение колеса или перемещение секций рабочих органов преобразуют трансмиссии-передачи и крутящего момента в трансмиссии передачи импульса силы - количества движения. Общеизвестно, что передача крутящего момента обходится очень дорого и очевидно, что натяжение нити обходится очень дешево. Это удобно для шагания в воде / уборки камыша, веточного корма, плодов и ягод, бура в шахте, туннелях.
Двигатель - источник импульсов содержит цилиндр 1 с рабочим пространством внутри для прямолинейно-возвратно-поступательного движения комплекта поршня 2 с чашками 3 и дисками 4 уплотнения под действием сил упругости и давления рабочего материала (газов или жидкости) для снижения или устранения утечки этого материала и потерь энергии при выполнении рабочих промессов в рабочих пространствах перемещением штока 5, на котором жестко установлен поршень. Чашки 3 и диски 4 присоединены к торцам поршня и выполняет функции колец уплотнения, имеют в середине отверстия, передают поршню и на поверхность цилиндра давление, создают эффект самоуплотнения с двух сторон (торцов) поршня для протекания рабочих процессов в двух (штоковой и нештоковой) полостях, аналогично работе гидроцилиндра двухстороннего действия.
Ход поршня регулируется для изменения степени сжатия и применения различных типов топлива. Это делает двигатель многотопливным, исключает детонацию при несоответствии актанового числа, исключает разрушение подшипников коленчатого вала, которых здесь нет. Крутящий момент заменен энергопотоком импульсов сил - растяжением нити или шнура для работы без систем смазки и перемещения шагающих рабочих органов и вращения колес храповиками. Импульсная передача передает импульсы давления газов на поршень растяжением нити к храповику, движителям и рабочим органам без сложнейшей трансмиссии. Соединение нити и передача силы общеизвестными способами и средствами в сотни раз упрощает конструкцию, познание, производство и применение. Такой новый результат применения нити передачи импульсов (дерганий) повышает уровень техники, методов, средств простейшего опознания.
Импульсная передача включает в другом варианте исполнения, допускает перемещение храповика и регулирование передаточного числа, нагрузки, силы и скорости. Такой вариант действует аналогично домкрату - преобразователю поворотных импульсов рычага во вращение винта или подачи импульсами (дозами) жидкости в рабочую полость при подъеме груза. Плечи рычага и храповика изменяются настройкой. Каждая доза, импульс передает энергию. Частота, время, амплитуды регулируются и натяжением нити, смещением храповика на рычаге. Импульсами-дозами передают силу электротрансмиссии, гидрообъемные передачи. Импульсы тока частотой 50 Герц, импульсы горения топлива двигателя просто передаются колесам, сглаживаются инерцией колес и машин.
Длина энергопотока с нитью допускает передачу энергии прицепам, бортам и ногам. Импульсная нитевая передача широко используется кукловодами при совершении сложнейших ходов, а в трансмиссии эти движения не имеют такого разнообразия.
Прямая пропорциональность сил импульсов силам прижатия дисков-колец гарантирует компенсацию износа трущихся поверхностей, следовательно, ресурс самовосстанавливается. Передача импульсов и натяжений нити в любом положении в пространстве.
Из графической части очевидно, что уплотнение сопряжений поршня и цилиндра кольцами (дисками и чашками) с возможностью использования давления рабочего материала для уплотнения допускает применение керамики. Установка поршня на штоке и наличие регулятора хода, степени сжатия для работы на различных топливах открывает новые пути решения проблем энергосбережения, снижения полициклических ароматических углеводородов, чистоты дыхания машин и климата. Нитями с пружинами решаются проблемы адаптации машины к неровностям и склонам для обработки горных территорий.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАШИНА И СПОСОБ ЕЕ ПРИМЕНЕНИЯ | 2011 |
|
RU2474502C2 |
| МАШИНА (ВАРИАНТЫ) | 2009 |
|
RU2472951C2 |
| СПОСОБ УПРАВЛЕНИЯ МАШИНОЙ (ВАРИАНТЫ) | 2010 |
|
RU2489581C2 |
| СПОСОБЫ ОБРАБОТКИ ПОЧВЫ И УПРАВЛЕНИЯ И МАШИНА ДЛЯ ИХ РЕАЛИЗАЦИИ | 2007 |
|
RU2370007C2 |
| СПОСОБ УПРАВЛЕНИЯ МАШИНОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2337851C2 |
| АГРОМАШИНА И СПОСОБ ЕЕ ИСПОЛЬЗОВАНИЯ | 2003 |
|
RU2264320C2 |
| МАШИНА | 2011 |
|
RU2499720C2 |
| СПОСОБ ОЦЕНКИ ПАРАМЕТРОВ СЕЛЬХОЗМАШИНЫ | 1989 |
|
RU2023359C1 |
| СПОСОБ УПРАВЛЕНИЯ И ОЦЕНКИ ПАРАМЕТРОВ СЕЛЬСКОХОЗЯЙСТВЕННОГО АГРЕГАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2021654C1 |
| СПОСОБ ОБРАБОТКИ ЗЕМЛИ И АГРОМАШИНА | 2003 |
|
RU2265298C2 |
Изобретение относится к устройству двигателя самоходной машины. Двигатель содержит чашки и диски уплотнения поршня давлением рабочего материала. Достигается повышение КПД и снижение металлоемкости. 2 з.п. ф-лы, 6 ил.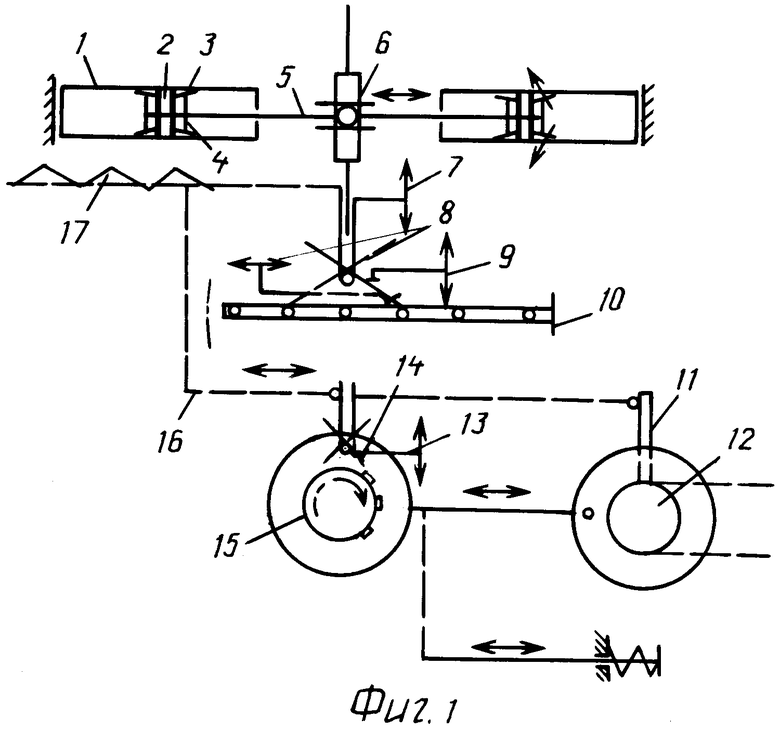
1. Машина, содержащая двигатель и потребители энергии, механизмы управления и рабочие органы для выполнения различных работ, отличающаяся тем, что двигатель содержит чашки и диски уплотнения поршня давлением рабочего материала.
2. Машина по п.1, отличающаяся тем, что содержит рабочие органы реверсивного хода шагающего и рулевого действия.
3. Машина по п.1, отличающаяся тем, что установлена канатная связь между коленами бортов при перевозке грузов на склонах.
| Анализатор гармоник на тензомостах | 1976 |
|
SU577471A1 |
| СПОСОБ УПРАВЛЕНИЯ И ОЦЕНКИ ПАРАМЕТРОВ СЕЛЬСКОХОЗЯЙСТВЕННОГО АГРЕГАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2021654C1 |
| Устройство для направления навесного культиватора по междурядьям пропашных культур при автоматическом его вождении | 1961 |
|
SU143254A1 |
| JP 5153837 A, 22.06.1993 | |||
| КЕРАМИЧЕСКАЯ МАССА ДЛЯ ИЗГОТОВЛЕНИЯ ОБЛИЦОВОЧНОЙ ПЛИТКИ | 2012 |
|
RU2508270C1 |
| JP 2009156179 A, 16.07.2009 | |||
| Почвообрабатывающая машина | 1989 |
|
SU1695835A1 |
| САМОУПЛОТНЯЮЩЕЕСЯ УСТРОЙСТВО | 0 |
|
SU302904A1 |

