Уровень техники
Настоящее изобретение, в общем, относится к системе для привода рабочей рамы сельскохозяйственного орудия и, более конкретно, к приводу рабочей рамы, выполненному с возможностью переноса веса с рабочего бруса на рабочую раму, когда рабочая рама находится в опущенном положении, и поднятия рабочей рамы в транспортное положение.
Для культивации почвы, посева, уборки урожая и пр. разработан и применяется ряд сельскохозяйственных орудий. Сеялки, например, обычно буксируются тракторами и могут охватывать широкие полосы культивированной или не культивированной почвы. Такие устройства обычно вскрывают почву, вносят семена во вскрытую почву, и вновь закрывают почву за одну операцию. В сеялках семена обычно вносят из бункеров и распределяют по высевающим секциям с помощью системы распределения. Чтобы максимально повысить эффективность операции посева, можно охватывать очень широкие полосы почвы, расширяя полосу боковыми секциями сеялки по обе стороны от центральной балки прицепного орудия. Боковые секции обычно содержат рабочий брус, рабочие рамы, высевающие секции и опорные колеса. В некоторых конфигурациях рабочие рамы могут поворачиваться относительно рабочего бруса так, чтобы оставаться параллельными поверхности почвы независимо от ее наклона. К сожалению, тяговое усилие, прилагаемое для протягивания высевающих секций по почве, может создавать крутящий момент, который заставляет рабочие рамы поворачиваться вверх. Такой поворот вверх рабочих рам может уменьшить глубину проникновения в почву инструментов для взаимодействия с землей, что приводит к нежелательной глубине высева семян.
Краткое описание изобретения
Варианты настоящего изобретения включают привод рабочей рамы, выполненный с возможностью переноса веса с рабочего бруса на рабочую раму, когда рабочая рама находится в опущенном положении, и поднятия рабочей рамы в транспортное положение. В одном варианте сельскохозяйственное орудие содержит рабочий брус и рабочую раму, соединенную с рабочим брусом с возможностью поворота. Сельскохозяйственное орудие также содержит множество высевающих секций, соединенных с рабочей рамой, и привод рабочей рамы, проходящий между рабочим брусом и рабочей рамой. Привод рабочей рамы выполнен с возможностью поворота рабочей рамы между опущенным положением, в котором каждая высевающая секция опущена в контакт с почвой, и транспортным положением, в котором каждая высевающая секция поднята над почвой. Привод рабочей рамы также выполнен с возможностью переноса веса с рабочего бруса на рабочую раму, когда рабочая рама находится в опущенном положении. Каждая высевающая секция содержит инструмент для взаимодействия с землей, выполненный с возможностью избирательного зацепления и расцепления с почвой, когда рабочая рама находится в опущенном положении. Перенос веса с рабочего бруса на рабочую раму поджимает высевающие секции к почве, несмотря на изменения наклона почвы и/или крутящего момента, возникающего в результате тягового усилия, воздействующего на инструменты для взаимодействия с землей. Следовательно, инструменты для взаимодействия с землей могут сохранять требуемую глубину проникновения в почву во время операции посева и/или высадки.
Краткое описание чертежей
Эти и другие признаки, аспекты и преимущества настоящего изобретения станут более понятными при прочтении нижеследующего подробного описания со ссылкой на прилагаемые чертежи, на которых аналогичными позициями обозначены аналогичные элементы на всех чертежах и на которых:
Фиг. 1 представляет собой вид в перспективе складывающегося сельскохозяйственного орудия в рабочем положении.
Фиг. 2 представляет собой деталь вида в перспективе складывающегося сельскохозяйственного орудия по фиг. 1 по линии 2-2.
Фиг. 3 представляет собой вид сбоку складывающегося сельскохозяйственного орудия по фиг. 1, иллюстрирующий высевающую секцию в рабочем положении.
Фиг. 4 представляет собой вид сбоку складывающегося сельскохозяйственного орудия по фиг. 1, иллюстрирующий высевающую секцию в нерабочем положении.
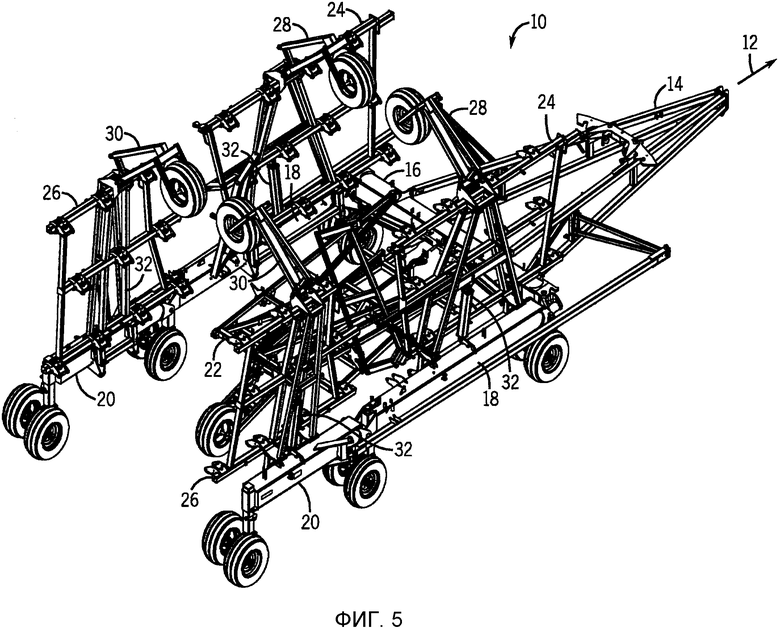
Фиг. 5 представляет собой вид в перспективе складывающегося сельскохозяйственного орудия по фиг. 1 в транспортном положении.
Подробное описание изобретения
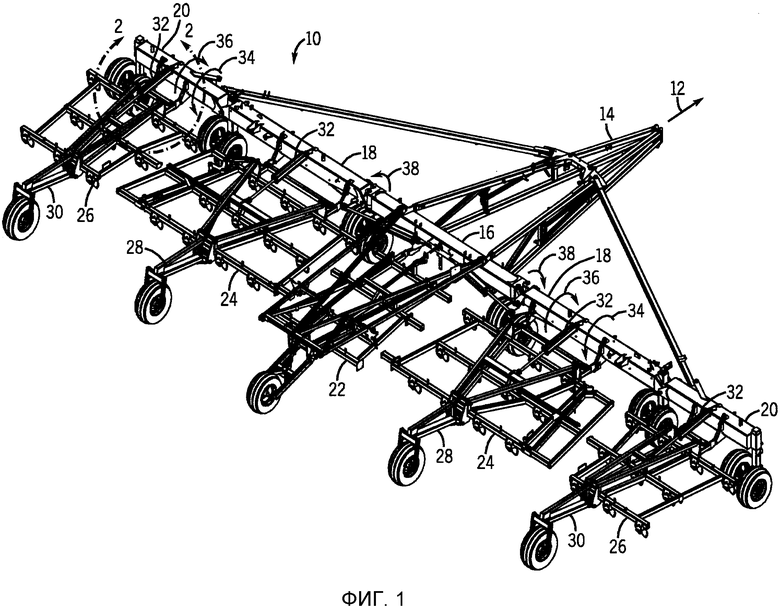
На фиг. 1 приведен вид в перспективе складывающегося орудия 10 в рабочем положении. Орудие 10 предназначено для буксировки за рабочей машиной, например, трактором, в направлении 12 движения. Орудие 10 содержит буксирный тяговый узел 14, который показан в форме А-образного рамного сцепного узла. Буксирный тяговый узел 14 может содержать сцепку, используемую для соединения с соответствующей сцепкой трактора через шаровое соединение, серьгу и т.п. Буксирный тяговый узел 14 соединен с центральным рабочим брусом 16 и двумя первыми боковыми рабочими брусьями 18, каждый из которых соединен с центральным рабочим брусом 16. Кроме того, с каждым первым боковым рабочим брусом 18 соединен второй боковой рабочий брус 20. Как показано на чертеже, и первые боковые рабочие брусья 18, и вторые боковые рабочие брусья 20 по существу выровнены с продольной осью центрального рабочего бруса 16. Другими словами, каждый рабочий брус 16, 18, 20 расположен перпендикулярно буксирному тяговому узлу 14. В альтернативных вариантах центральный рабочий брус может отсутствовать, а первые боковые рабочие брусья 18 могут крепиться непосредственно к буксирному тяговому узлу 14. Как более подробно описано ниже, и первые боковые рабочие брусья 18, и вторые боковые рабочие брусья 20 могут поворачиваться назад или вперед для транспортировки.
В данном варианте осуществления центральная рабочая рама 22 соединена с центральным рабочим брусом 16, первые боковые рабочие рамы 24 соединены с первыми боковыми рабочими брусьями 18, а вторые боковые рабочие рамы 26 соединены со вторыми боковыми рабочими брусьями 20. Как более подробно описано ниже, к каждой рабочей рамой 22, 24 и 26 прикреплены высевающие секции для внесения в почву семян и/или удобрений. В показанном рабочем положении каждая первая боковая рабочая рама 24 поддерживается колесным узлом 28, а каждая вторая боковая рабочая рама 26 поддерживается колесным узлом 30. В такой конфигурации буксировка орудия 10 в направлении 12 позволяет высевающим секциям зацепляться с почвой, внося в нее семена и/или удобрения. Кроме того, привод 32 рабочей рамы проходит от каждой рабочей рамы 24 и 26 к соответствующему рабочему брусу 18 и 20 для переноса веса с рабочих брусьев 18 и 20 на рабочие рамы 24 и 26. Приводы 32 рабочей рамы также служат для подъема рабочих рам 24, 26 в транспортное положение. Хотя каждый рабочий брус показанного варианта осуществления содержит одну рабочую раму, следует понимать, что в альтернативных вариантах каждый рабочий брус может иметь множество рабочих рам (например, 2, 3, 4 и т.д.).
Как будет подробно описано ниже, некоторые высевающие секции содержат инструмент для взаимодействия с землей и привод инструмента, выполненный с возможностью изменения глубины проникновения инструмента в почву. Например, привод может перемещать инструмент для взаимодействия с землей между рабочим положением и нерабочим положением. В рабочем положении инструмент для взаимодействия с землей вскрывает борозду в почве для внесения семян. В нерабочем положении инструмент для взаимодействия с землей извлечен из почвы для снижения силы тяги на орудие 10. Например, когда рабочие рамы 24 и 26 находятся в показанном опущенном положении, инструменты для взаимодействия с землей можно перевести в рабочее положение для формирования в почве борозды для внесения семян. Однако, когда орудие 10 достигает поворотной полосы, приводы инструмента для взаимодействия с землей могут перевести каждый инструмент для взаимодействия с землей в нерабочее положение, тем самым, извлекая инструменты для взаимодействия с землей из почвы. Таким образом орудие можно повернуть в поворотной полосе, не формируя нежелательных борозд. После того как орудие будет выставлено по следующему ряду, приводы инструментов перемещают инструменты для взаимодействия с землей в рабочее положение для продолжения операций высева или посева.
В данном варианте осуществления рабочие рамы 24 и 26 соединены с возможностью поворота с соответствующими рабочими брусьями 18 и 20 так, что рабочие рамы 24, 26 могут поворачиваться вниз (в направлении, показанном стрелкой 34) и/или вверх (в направлении, показанном стрелкой 36) относительно рабочих брусьев 18 и 20. Таким образом, рабочие рамы 24 и 26 могут сохранять положение, по существу параллельное почве, несмотря на различные уклоны почвы. Однако, как будет подробно описано ниже, тяговое усилие, связанное с протягиванием инструментов для взаимодействия с землей по почве, может привести к повороту рабочих рам 24 и 26 вверх в направлении, показанном стрелкой 36. Следовательно, приводы 32 рабочих рам должны поджимать рабочие рамы 24, 26 вниз в направлении 34, тем самым перенося вес с рабочих брусьев 18, 20 на рабочие рамы 24, 26. В результате к высевающим секциям можно приложить достаточную направленную вниз силу, чтобы поддерживать контакт между этими высевающими секциями и поверхностью почвы. Кроме того, приводы 32 рабочих рам выполнены с возможностью поворота рабочих рам 24, 26 вверх в направлении 36, тем самым, поднимая рабочие рамы 24 и 26 для транспортировки.
В данном варианте осуществления орудие 10 выполнено с возможностью перемещения из показанного рабочего режима в транспортный режим путем складывания первого и второго боковых рабочих брусьев 18 и 20 назад в направлении, показанном стрелкой 38, или вперед, и складывания первой и второй боковых рабочих рам 24 и 26 вверх в направлении, показанном стрелкой 36. Более конкретно, первые боковые рабочие рамы 24 и вторые боковые рабочие рамы 26 можно складывать приблизительно на 90 градусов вверх в направлении, показанном стрелкой 36 из опущенного положения в транспортное положение. Затем, первые боковые рабочие брусья 18 и вторые боковые рабочие брусья 20 можно сложить приблизительно на 90 градусов назад в направлении, показанном стрелкой 38. В альтернативных вариантах рабочие брусья 18, 20 можно складывать приблизительно на 90 градусов вперед. Как подробно описано ниже, сельскохозяйственное орудие в транспортном положении будет иметь существенно меньшие габариты.
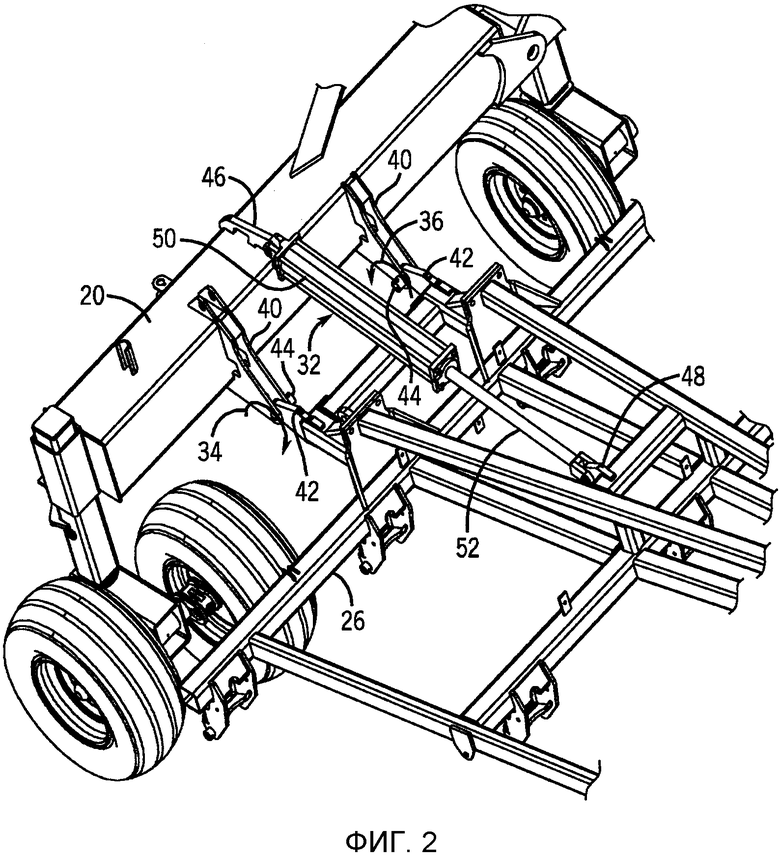
На фиг.2 показана деталь вида в перспективе по фиг.1 по линии 2-2. Как описано выше, рабочая рама 26 соединена с возможностью поворота с рабочим брусом 20 так, что рабочая рама 26 может подстраиваться под контуры грунта и перемещаться в транспортное положение. В данном варианте осуществления предусмотрены первый кронштейн 40, соединенный с рабочим брусом 20, второй кронштейн 42, соединенный с рабочей рамой 24, и палец 44, соединяющий с возможностью вращения первый кронштейн 40 со вторым кронштейном 42. В такой конфигурации рабочая рама 26 может поворачиваться вокруг пальца 44 вниз, в направлении, показанном стрелкой 34, и/или вверх, в направлении, показанном стрелкой 36. На чертеже показано, что для поворотного соединения рабочей рамы 26 с рабочим брусом 20 используются два первых кронштейна 40, два вторых кронштейна 42 и два пальца 44. Однако следует понимать, что в альтернативных вариантах может использоваться большее или меньшее количество первых кронштейнов 40, вторых кронштейнов 42 и пальцев 44. Например, в некоторых вариантах можно использовать 1, 2, 3, 4, 5, 6 или больше групп, состоящих из кронштейнов 40 и 42 и пальца 44.
В данном варианте осуществления привод 32 рабочей рамы содержит линейный приводной цилиндр. Следует понимать, что линейный приводной цилиндр может приводиться в действие гидравлическим или пневматическим давлением от системы нагнетания рабочей среды. Однако следует понимать, что можно использовать и альтернативные варианты, например, электрический линейный привод и/или электрический, гидравлический или пневматический вращающийся привод, способствующий повороту рабочей рамы 26 относительно рабочего бруса 20. В данном варианте осуществления приводной цилиндр 32 соединен с рабочим брусом 20 первым кронштейном 36 и с рабочей рамой 26 вторым кронштейном 48. Таким образом, выдвижение или втягивание штока 52 поршня относительно цилиндра 50 приводит к повороту рабочей рамы 26 вниз по стрелке 34 или вверх по стрелке 36. Хотя поворотное соединение и привод 32 рабочей рамы были описаны выше применительно ко второму боковому рабочему брусу 20 и второй боковой рабочей раме 26, следует понимать, что такую же конструкцию можно использовать для первого бокового рабочего бруса 18 и первой боковой рабочей рамы 24.
Как более подробно описано ниже, хотя рабочая рама 26 находится в показанном опущенном положении, привод 32 рабочей рамы выполнен с возможностью создания первого крутящего момента, направленного вниз по стрелке 34, тем самым поджимая высевающие секции к почве. Поэтому прикатывающие катки высевающих секций могут поддерживать контакт с почвой, несмотря на изменение высоты почвы и/или крутящего момента, направленного вверх по стрелке 36, создаваемого тяговым усилием, воздействующим на инструменты для взаимодействия с землей на высевающих секциях. Следовательно, во время проведения операций высева или посева инструменты для взаимодействия с землей можно удерживать на требуемой глубине проникновения в почву. Кроме того, привод 32 рабочей рамы выполнен с возможностью перемещения рабочей рамы 26 в транспортное положение, поворачивая его вверх по стрелке 36, тем самым поднимая инструменты для взаимодействия с землей над поверхностью почвы.
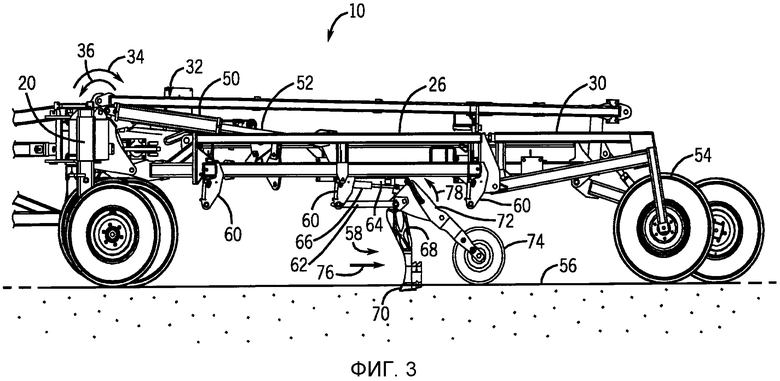
На фиг. 3 показан вид сбоку складывающегося сельскохозяйственного орудия 10 по фиг. 1, иллюстрирующий высевающую секцию в рабочем положении. Как показано на чертеже, колесный узел 30 содержит колесо 54, которое контактирует с поверхностью 56 почвы. Поскольку рабочая рама 26 может поворачиваться в направлениях, показанных стрелками 34 и 36, контакт между колесом 54 и поверхностью 56 почвы может переводить рабочую раму 26 в ориентацию, по существу параллельную поверхности 56 почвы. Следовательно, каждая высевающая секция 58 может быть правильно позиционирована для внесения в почву семян и/или удобрений. В данном варианте осуществления высевающие секции 58 соединены с соответствующими крепежными кронштейнами 60 на рабочей раме 26. Хотя для ясности на чертеже показана только одна высевающая секции 58, следует понимать, что высевающая секция может крепиться к каждому крепежному кронштейну 60 на рабочей раме 26. Например, в некоторых вариантах осуществления к каждой второй боковой рабочей раме 26 и/или первой боковой рабочей раме 24 может крепиться по меньшей мере 2, 4, 6, 8, 10, 12, 18, 20 и более высевающих секций 58.
Как показано на чертеже, высевающая секция 58 содержит первый элемент 62, второй элемент 64 и привод инструмента, например, приводной цилиндр 66 (например, гидравлический и/или пневматический узел поршень-цилиндр), соединенный с крепежным кронштейном 60. Цилиндр 66 может быть соединен с системой подачи среды, которая создает поток среды под давлением, которая смещает шток поршня, выходящий из цилиндра. Следует понимать, что система подачи среды может быть гидравлической или пневматической, и, следовательно, цилиндр 66 может быть гидравлическим или пневматическим. Крепежный кронштейн 60 имеет такую конфигурацию, чтобы взаимодействовать с рабочей рамой 26, тем самым закрепляя высевающую секцию 58 на орудии 10. Например, к рабочей раме 26 можно параллельно прикрепить множество высевающих секций 58. В показанной конфигурации первый элемент 62, второй элемент 64 и крепежный кронштейн 60 образуют элементы параллельного рычажного механизма, также известного как шарнирный четырехугольник. Следует понимать, что элементы высевающей секции 58, такие как крепежный кронштейн 60, первый элемент 62 и второй элемент 64 могут быть выполнены из любого подходящего материала, например, стали.
Цилиндр 66 прикреплен к хвостовику 68 с помощью пальца на конце штока поршня. Хвостовик, в свою очередь, соединен с инструментом 70 для взаимодействия с землей крепежными элементами, которые позволяют регулировать высоту инструмента 70 для взаимодействия с землей так, чтобы можно было изменять глубину посева. Палец соединен с первым элементом 62 и хвостовиком 68, что позволяет хвостовику 68 поворачиваться вокруг пальца, когда цилиндр 66 выдвигается и втягивается. Соответственно инструмент 70 для взаимодействия с землей движется вниз или вверх на основании выдвижения или втягивания цилиндра 66. Следовательно, привод инструмента/цилиндр 66 выполнен с возможностью изменения глубины проникновения инструмента 70 для взаимодействия с землей в почву 56, независимо от расстояния между рабочей рамой 26 и почвой 56. Хвостовик 68 может иметь несколько отверстий для приема пальца, соединяющего конец цилиндра 66 с хвостовиком 68. Такие отверстия могут быть полезными для регулирования угла цилиндра 66 относительно параллельного рычажного механизма, в результате чего меняются угол и величина сил, действующих на цилиндр.
В настоящем варианте частичный сброс давления на конце цилиндра 66 со стороны крышки приводит к снижению направленной вниз силы, прилагаемой узлом 72 прикатывающего катка. Подача давления на конец цилиндра 66 со стороны штока приводит к подъему узла 72 прикатывающего катка и, в итоге, к подъему прикатывающего катка 74 над поверхностью. Следует понимать, что узел 72 прикатывающего катка выполнен с возможностью создания требуемой глубины проникновения инструмента 70 для взаимодействия с землей в почву 56. В данном варианте осуществления узел 72 прикатывающего катка может способствовать регулированию высоты прикатывающего катка 74 с помощью прорези и крепежного элемента или эквивалентной конструкции. Для облегчения внесения семян во время работы инструмент 70 для взаимодействия с землей может быть соединен с системой подачи продукта.
Благодаря такой приведенной в качестве примера конструкции высевающей секции инструмент 70 для взаимодействия с землей можно перемещать между рабочим положением и нерабочим положением на основании выдвижения и втягивания привода/цилиндра 66. Как описано выше, втягивание цилиндра 66 заставляет инструмент 70 для взаимодействия с землей повернуться вверх, в результате чего осуществляется извлечение инструмента 70 для взаимодействия с землей из почвы и перевод инструмента 70 для взаимодействия с землей в нерабочее положение. Перемещение каждого инструмента 70 для взаимодействия с землей в нерабочее положение облегчает транспортировку сеялки 10 за счет снижения тягового усилия, действующего на каждый инструмент 70. Кроме того, поток продукта (семян, удобрений и пр.) к высевающей секции 58 можно временно остановить, когда инструмент 70 для взаимодействия с землей находится в нерабочем положении. Следовательно, сеялка может перемещаться по полю (например, поворачивать в конце гона), не внося продукт в почву.
В то же время каждый инструмент 70 для взаимодействия с землей можно перевести в рабочее положение, выдвинув привод/цилиндр 66, тем самым заставляя инструмент 70 для взаимодействия с землей повернуться вниз. Следует понимать, что когда инструмент 70 для взаимодействия с землей находится в рабочем положении, при движении орудия 10 по полю он может выкапывать борозду в почве. Когда борозда сформирована, система подачи продукта может вносить в почву семена и/или удобрения по подающей трубке. Прикатывающий каток закрывает борозду, тем самым формируя рядок семян, необходимый для развития растений.
Следует понимать, что контакт между инструментом 70 для взаимодействия с землей и почвой 56 создает тяговое усилие в направлении 76. Из-за вертикального смещения инструмента 70 для взаимодействия с землей относительно крепежного кронштейна 60 тяговое усилие создает крутящий момент в направлении, показанном стрелкой 78. Возникающий крутящий момент через кронштейн 60 передается на рабочую раму 26, создавая тем самым крутящий момент, направленный вверх по стрелке 36. В некоторых вариантах вес рабочей рамы 26 может быть недостаточен, чтобы преодолеть этот крутящий момент и поддерживать контакт между прикатывающим катком 74 и почвой 56. В результате рабочая рама 26 может повернуться в направлении, показанном стрелкой 36, тем самым уменьшая глубину проникновения инструмента 70 для взаимодействия с землей в почву. Следовательно, семена и/или удобрения могут быть внесены на нежелательную глубину. Для компенсации крутящего момента, создаваемого тяговым усилием, привод 32 рамы может прилагать противодействующий крутящий момент в направлении, показанном стрелкой 34, тем самым перенося вес с рабочего бруса 20 на рабочую раму 26. Этот дополнительный крутящий момент может быть достаточен для удержания прикатывающего катка 74 на почве, тем самым поддерживая требуемую глубину проникновения.
Кроме того, как описано выше, привод 32 рамы может поворачивать рабочую раму 26 вверх по стрелке 36 для перевода рамы из показанного рабочего положения в транспортное положение. Например, на штоковый конец цилиндра 50 можно подать давление, заставляя шток 52 втянуться. Поскольку шток поршня соединен с рабочей рамой 26 кронштейном 48, втягивание штока 52 поршня приведет к повороту рамы 26 вверх по стрелке 36. Как более подробно описано ниже, и первые боковые рабочие рамы 24, и вторые боковые рабочие рамы 26 можно поворачивать вверх вокруг их соответствующих рабочих брусьев 18, 20 для перевода орудия 109 в транспортное положение.
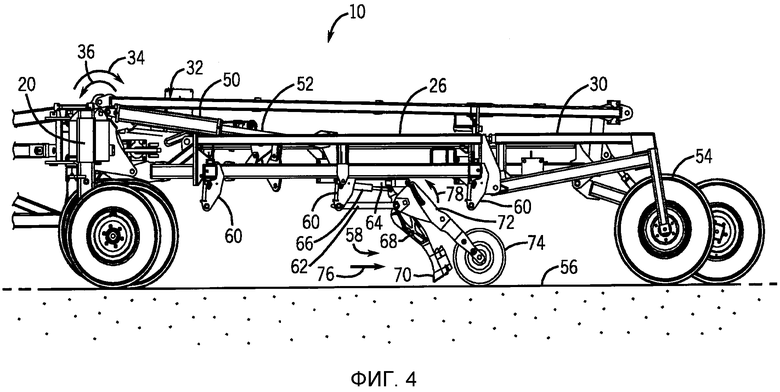
На фиг. 4 показан вид сбоку бокового сельскохозяйственного орудия 10 по фиг. 1, иллюстрирующий высевающую секцию 58 в нерабочем положении. Как описано выше, инструмент 70 для взаимодействия с землей может поворачиваться в показанное нерабочее положение, при втягивании штока привода/цилиндра 66. Например, давление среды можно подать на штоковый конец цилиндра 66, чтобы поднять хвостовик 68 и инструмент 70 для взаимодействия с землей относительно узла 72 прикатывающего катка. Таким образом, инструмент 70 для взаимодействия с землей можно извлечь из почвы 56, даже когда рама 26 находится в опущенном положении. Например, когда орудие 10 достигает конца гона, цилиндры 66 могут перевести инструменты 70 для взаимодействия с землей в нерабочее положение, тем самым, извлекая инструменты 70 для взаимодействия с землей из почвы 56, не поднимая рабочие рамы 24 и 26. Такая конструкция позволяет повернуть орудие 10 в поворотной полосе, не создавая ненужных борозд и не переводя рабочие рамы 24 и 26 в транспортное положение. По завершении операций высева и/или посева приводы 32 рам могут втянуться, переводя рабочие рамы 24 и 26 в транспортное положение для облегчения перемещения орудия по полю.
На фиг. 5 показан вид в перспективе складывающегося сельскохозяйственного орудия 10 по фиг. 1, в транспортном положении. Как показано на чертеже, первые боковые рабочие рамы 24 и вторые боковые рабочие рамы 26 повернут приблизительно на 90 градусов вверх из их рабочего положение. Как описано выше, приводы 32 рам могут поворачивать рабочие рамы 24 и 26 вверх по стрелке 36 вокруг пальцев 44, тем самым, поднимая высевающие секции 58 над поверхностью 56 почвы. Кроме того, первые боковые рабочие брусья 18 и вторые боковые рабочие брусья 20 повернуты приблизительно на 90 градусов назад из их рабочего положения. Кроме того, колесные узлы 28 и 30 повернуты вниз, поскольку нагрузку, создаваемую рабочими рамами 24 и 26, в транспортном положении несут рабочие брусья 18 и 20. Такая конструкция орудия 10 позволяет создать компактный профиль для транспортировки.
Хотя здесь были показаны и описаны только некоторые признаки изобретения, специалистам в данной области техники будут очевидны множество дополнений и изменений. Поэтому следует понимать, что прилагаемая формула изобретения охватывает все такие дополнения и изменения.
Изобретение относится к области сельского хозяйства и может быть использовано в сеялках. В одном из вариантов сельскохозяйственное орудие содержит рабочий брус и рабочую раму, соединенную с рабочим брусом с возможностью поворота. Сельскохозяйственное орудие также содержит множество высевающих секций, соединенных с рабочей рамой, и привод рамы, проходящий между рабочим брусом и рабочей рамой. Привод рамы выполнен с возможностью поворота рабочей рамы между опущенным положением, в котором каждая высевающая секция находится в контакте с почвой, и транспортным положением, в котором каждая высевающая секция поднята над почвой. Привод рамы также выполнен с возможностью переноса веса с рабочего бруса на рабочую раму, когда рабочая рама находится в опущенном положении. Этот вес является достаточным для поддержания контакта между каждой высевающей секцией и почвой без дополнительного смещающего узла, проходящего между рабочим брусом и рабочей рамой. Каждая высевающая секция содержит инструмент для взаимодействия с землей, выполненный с возможностью избирательного зацепления и расцепления с почвой, когда рабочая рама находится в опущенном положении. Изобретение позволит сохранять требуемую глубину проникновения в почву во время операции посева. 3 н. и 17 з.п. ф-лы, 5 ил.
1. Сельскохозяйственное орудие, содержащее:
рабочий брус,
рабочую раму, соединенную с рабочим брусом с возможностью поворота,
множество высевающих секций, соединенных с рабочей рамой, и
привод рамы, проходящий между рабочим брусом и рабочей рамой и выполненный с возможностью поворота рабочей рамы между опущенным положением, в котором каждая высевающая секция входит в контакт с почвой, и транспортным положением, в котором каждая высевающая секция поднята над почвой, при этом привод рамы выполнен с возможностью переноса веса с рабочего бруса на рабочую раму, когда рабочая рама находится в опущенном положении, и вес, перенесенный с рабочего бруса на рабочую раму приводом рамы, является достаточным для поддержания контакта между каждой высевающей секцией и почвой без дополнительного смещающего узла, проходящего между рабочим брусом и рабочей рамой,
причем каждая высевающая секция содержит инструмент для взаимодействия с землей, выполненный с возможностью избирательного зацепления и расцепления с почвой, когда рабочая рама находится в опущенном положении.
2. Орудие по п. 1, в котором привод рамы содержит линейный привод, проходящий между первым установочным кронштейном на рабочем брусе и вторым установочным кронштейном на рабочей раме.
3. Орудие по п. 1, в котором привод рамы содержит гидравлический привод.
4. Орудие по п. 1, содержащее множество рабочих брусьев и множество рабочих рам, при этом привод рамы проходит между каждой рабочей рамой и соответствующим рабочим брусом.
5. Орудие по п. 4, в котором множество рабочих брусьев содержит два первых боковых рабочих бруса, каждый из которых имеет первый конец и второй конец, при этом первый конец шарнирно соединен с буксирным тяговым узлом, и два вторых боковых рабочих бруса, каждый из которых соединен со вторым концом соответствующего первого бокового рабочего бруса, причем множество рабочих рам содержит две первые боковые рабочие рамы, каждая из которых соединена с соответствующим первым боковым рабочим брусом, и две вторые боковые рабочие рамы, каждая из которых соединена с соответствующим вторым боковым рабочим брусом.
6. Орудие по п. 1, в котором каждая высевающая секция содержит привод инструмента, соединенный с инструментом для взаимодействия с землей и выполненный с возможностью перемещения инструмента между рабочим положением, в котором инструмент для взаимодействия с землей зацепляется с почвой, и нерабочим положением, в котором инструмент для взаимодействия с землей расцепляется с почвой, когда рама находится в опущенном положении.
7. Орудие по п. 1, в котором каждая высевающая секция содержит прикатывающий каток, выполненный с возможностью установки глубины проникновения инструмента для взаимодействия с землей в почву, при этом привод рамы выполнен с возможностью расположения рабочей рамы так, что каждый прикатывающий каток контактирует с почвой, когда рабочая рама находится в опущенном положении.
8. Орудие по п. 1, содержащее сцепной узел, соединенный с рабочим брусом, при этом сельскохозяйственное орудие выполнено с возможностью буксирования с помощью сцепного узла.
9. Сельскохозяйственное орудие, содержащее:
рабочий брус,
рабочую раму, соединенную с рабочим брусом с возможностью поворота,
множество высевающих секций, соединенных с рабочей рамой, при этом каждая высевающая секция содержит инструмент для взаимодействия с землей и привод инструмента, выполненный с возможностью изменения глубины проникновения инструмента для взаимодействия с землей в почву независимо от расстояния между рабочей рамой и почвой,
привод рамы, проходящий между рабочим брусом и рабочей рамой, причем привод рамы выполнен с возможностью прикладывания первого крутящего момента к рабочей раме для поджатия множества высевающих секций к почве и прикладывания второго крутящего момента в противоположном направлении относительно первого крутящего момента для поднятия рабочей рамы в транспортное положение, в котором высевающие секции подняты над почвой, при этом привод рамы выполнен с возможностью переноса веса с рабочего бруса на рабочую раму, когда рабочая рама находится в опущенном положении, и вес, перенесенный с рабочего бруса на рабочую раму приводом рамы, является достаточным для поддержания контакта между каждой высевающей секцией и почвой без дополнительного смещающего узла, проходящего между рабочим брусом и рабочей рамой.
10. Орудие по п. 9, в котором привод рамы содержит приводной цилиндр.
11. Орудие по п. 10, в котором приводной цилиндр содержит гидравлический цилиндр.
12. Орудие по п. 9, содержащее множество рабочих брусьев и соответствующее множество рабочих рам, при этом привод рамы проходит между каждым рабочим брусом и каждой рабочей рамой.
13. Орудие по п. 9, в котором привод рамы выполнен с возможностью поворота рабочей рамы приблизительно на 90 градусов вверх для поднятия рабочей рамы в транспортное положение.
14. Орудие по п. 13, в котором рабочий брус выполнен с возможностью поворота приблизительно на 90 градусов назад после поднятия рабочей рамы в транспортное положение.
15. Сельскохозяйственное орудие, содержащее:
рабочий брус,
рабочую раму, соединенную с рабочим брусом,
множество высевающих секций, соединенных с рабочей рамой, и
привод рамы, проходящий между рабочим брусом и рабочей рамой и выполненный с возможностью перемещения рабочей рамы между опущенным положением, в котором каждая высевающая секция контактирует с почвой, и транспортным положением, в котором каждая высевающая секция поднята над почвой, при этом привод рамы выполнен с возможностью переноса веса с рабочего бруса на рабочую раму, когда рабочая рама находится в опущенном положении, и вес, перенесенный с рабочего бруса на рабочую раму приводом рамы, является достаточным для поддержания контакта между каждой высевающей секцией и почвой без дополнительного смещающего узла, проходящего между рабочим брусом и рабочей рамой,
причем каждая высевающая секция содержит инструмент для взаимодействия с землей и приводной цилиндр инструмента, выполненный с возможностью перемещения инструмента для взаимодействия с землей между зацепленным с землей рабочим положением и расцепленным с землей нерабочим положением, когда рабочая рама находится в опущенном положении.
16. Орудие по п. 15, в котором привод рамы содержит гидравлический цилиндр.
17. Орудие по п. 15, в котором привод рамы выполнен с возможностью перемещения рабочей рамы между опущенным положением и транспортным положением путем поворота рабочей рамы вверх относительно рабочего бруса.
18. Орудие по п. 15, в котором каждая высевающая секция содержит прикатывающий каток, выполненный с возможностью установки глубины проникновения инструмента для взаимодействия с землей в почву, при этом привод рамы выполнен с возможностью расположения рабочей рамы так, что каждый прикатывающий каток контактирует с почвой, когда рабочая рама находится в опущенном положении.
19. Орудие по п. 15, содержащее множество рабочих брусьев и множество рабочих рам, при этом привод рамы проходит между каждой рабочей рамой и соответствующим рабочим брусом.
20. Орудие по п. 15, содержащее сцепной узел, соединенный с рабочим брусом, при этом сельскохозяйственное орудие выполнено с возможностью буксирования с помощью сцепного узла.
| US 20100025056 A1, 02.04.2010; | |||
| US 7555990 B2, 07.07.2009; | |||
| US 20070240889 A1, 18.10.2007; | |||
| ПОЧВООБРАБАТЫВАЮЩЕЕ ОРУДИЕ | 1995 |
|
RU2092994C1 |
| US 3548954 A1, 22.12.1970 | |||

