ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к системам сети для текучей среды и, в частности, к управлению вентиляцией в таких системах.
УРОВЕНЬ ТЕХНИКИ
Большие системы сети для текучей среды могут в некоторых приложениях потреблять существенные количества энергии. Примером такой системы сети для текучей среды является вентиляционная система подземной шахты. Такая вентиляционная система может содержать множество вентиляторов, которые должны работать, чтобы поддерживать достаточное качество воздуха для здоровых рабочих условий в шахте.
Управление вентиляцией по требованию (VOD) иногда используется сегодня, чтобы уменьшать количество потребляемой энергии в подземных шахтах. Кратко, VOD означает, что свежий воздух направляется в конкретные местоположения в подземной шахте, только когда необходимо и в достаточном количестве, чтобы обеспечивать здоровую рабочую среду. Делались попытки использовать сетевые модели, т.е. модели, которые описывают динамические характеристики текучей среды сети подземной шахты, но они страдают от чувствительности к изменениям в инфраструктуре шахты и требуют существенных инженерных усилий для введения в эксплуатацию.
W02009/027815 раскрывает вентиляционную систему шахты, которая устанавливает динамическое требование к вентиляции как функцию отслеживания в реальном времени механизмов и/или местоположения персонала, и при этом это требование является распределенным в рабочих зонах через сеть вентиляции шахты, и при этом энергия, требуемая, чтобы осуществлять вентиляцию, минимизируется при удовлетворении требования для каждой рабочей зоны. Вентиляционная система шахты работает на основе предсказательной динамической имитационной модели сети вентиляции шахты вместе с моделированным оборудованием управления, таким как вентиляторы и регуляторы потока воздуха.
Однако определение динамической имитационной модели шахты является сложной обработкой, которая должна повторяться каждый раз, когда инфраструктура подземной шахты модифицируется.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Общая цель настоящего раскрытия состоит в том, чтобы упростить идентификацию сетевых характеристик системы сети для текучей среды.
Другая цель состоит в том, чтобы минимизировать потребление электрической энергии системы сети для текучей среды при остающейся способности обеспечивать достаточный поток текучей среды в упомянутой системе.
В результате, согласно первому аспекту настоящего раскрытия обеспечивается способ управления потоком текучей среды в системе сети для текучей среды посредством множества машин для текучей среды, при этом способ содержит:
a) эмпирическое определение отношения между изменением в скорости машины для текучей среды и соответствующим изменением в скорости потока текучей среды для каждой из множества машин для текучей среды,
b) определение минимальной общей мощности машин для текучей среды, которая обеспечивает минимальную требуемую скорость потока в системе сети для текучей среды, на основе ограничения, включающего в себя отношение между скоростью потока текучей среды и соответствующей скоростью машины для текучей среды, и
с) управление скоростью множества машин для текучей среды, так что достигается минимальная общая мощность машин для текучей среды в системе сети для текучей среды.
В результате, является возможной простая сетевая идентификация системы сети для текучей среды посредством эмпирического определения отношения между изменением в скорости машины для текучей среды и соответствующим изменением в скорости потока текучей среды для каждой машины для текучей среды в существующей системе сети для текучей среды. Эта обработка идентификации может легко повторяться, когда инфраструктура системы сети для текучей среды модифицируется, например расширяется, посредством повторения этапа a) выше. Определенное отношение может использоваться, чтобы определять общую минимальную электрическую мощность, которая должна обеспечиваться машинам для текучей среды в системе сети для текучей среды, посредством оптимизации, при остающейся способности обеспечивать минимальный требуемый поток текучей среды в системе сети для текучей среды.
Один вариант осуществления содержит изменение скорости машины для текучей среды каждой из множества машин для текучей среды до определения отношения на этапе a). Посредством изменения скорости вентилятора каждой машины для текучей среды упомянутое отношение между изменением в скорости машины для текучей среды и соответствующим изменением в скорости потока текучей среды может определяться для каждой машины для текучей среды. Тем самым могут получаться сетевые характеристики, включающие в себя каждую машину для текучей среды.
Один вариант осуществления содержит применение шаблона входного сигнала к множеству машин для текучей среды, чтобы тем самым изменять скорость машины для текучей среды множества машин для текучей среды, при этом шаблон входного сигнала применяется таким образом, что отношение между изменением в скорости машины для текучей среды и соответствующим изменением в скорости потока текучей среды может определяться для каждой машины для текучей среды.
В одном варианте осуществления шаблон входного сигнала является таким, что он обеспечивает возможность стабилизации потока текучей среды в системе сети для текучей среды, при этом обеспечивается отслеживание ступенек, применяемых к множеству машин для текучей среды.
В одном варианте осуществления изменение включает в себя последовательное изменение скорости машины для текучей среды каждой из множества машин для текучей среды.
В одном варианте осуществления последовательное изменение включает в себя изменение скорости машины для текучей среды каждой машины для текучей среды, так что только одна машина для текучей среды из множества машин для текучей среды подвергается изменению в скорости машины для текучей среды за один раз.
Один вариант осуществления содержит ожидание между двумя последовательными изменениями скорости машины для текучей среды до тех пор, когда поток текучей среды в системе сети для текучей среды вернется в исходное состояние, в котором система сети для текучей среды работала до этапа изменения скорости машины для текучей среды.
Тем самым, только вентилятор, который в текущее время подвергнут изменению скорости машины для текучей среды, обеспечивает данные измерения для определения отношения между скоростями машин для текучей среды и скоростями потока текучей среды.
В одном варианте осуществления этап a) содержит определение постоянной матрицы, определяющей отношение между изменением в скорости машин для текучей среды и соответствующим изменением в скорости потока текучей среды.
Один вариант осуществления содержит использование характеристик машин для текучей среды для определения минимальной общей мощности машин для текучей среды. Предпочтительно, характеристики машин для текучей среды, такие как характеристики вентиляторов для машин для текучей среды в форме вентиляторов, обеспеченные производителем вентиляторов, могут использоваться, чтобы определять электрическую мощность, потребляемую каждой машиной для текучей среды для конкретной скорости потока текучей среды, и, следовательно, характеристики машин для текучей среды могут предпочтительно использоваться для определения минимальной общей мощности машин для текучей среды. Характеристики машин для текучей среды предпочтительно загружаются и сохраняются в системе управления, в которой исполняется алгоритм или способ, здесь представленный.
В одном варианте осуществления этап b) включает в себя минимизацию суммы каждой индивидуальной мощности машины для текучей среды.
В одном варианте осуществления система сети для текучей среды является вентиляционной системой подземной шахты и при этом машины для текучей среды являются вентиляторами.
В одном варианте осуществления этап a) определения содержит определение отношения между изменением в скорости машины для текучей среды и соответствующим изменением в мощности машины для текучей среды для каждой из множества машин для текучей среды.
Один вариант осуществления содержит:
на этапе b) определение:
b1) оценку минимальной общей мощности машин для текучей среды, которая обеспечивает минимальную требуемую скорость потока в системе (1) сети для текучей среды, на основе отношения между изменением в скорости машины для текучей среды и соответствующим изменением в мощности машины для текучей среды для каждой из множества машин для текучей среды с ограничением, включающим в себя отношение между скоростью потока текучей среды и соответствующей скоростью машины для текучей среды;
и после этапа c) управление:
интерацией этапа b1) оценки и этапа c) управления до тех пор, когда различие между последовательными оцененными значениями минимальной общей мощности машин для текучей среды, полученными в итерационной обработке, будет меньше, чем предварительно определенное значение.
Во втором аспекте настоящего раскрытия обеспечивается компьютерный программный продукт, содержащий машиночитаемый носитель, на котором сохранен компьютерный код, при этом компьютерный код, когда исполняется, выполняет способ согласно первому аспекту, здесь представленному.
В третьем аспекте настоящего раскрытия обеспечивается система управления для управления потоком текучей среды в системе сети для текучей среды, содержащей множество машин для текучей среды, при этом система управления содержит:
систему обработки, выполненную с возможностью эмпирически определять отношение между изменением в скорости машины для текучей среды и соответствующим изменением в скорости потока текучей среды для каждой из множества машин для текучей среды, при этом система обработки выполнена с возможностью определять для каждой машины для текучей среды минимальную мощность, которая обеспечивает минимальную требуемую скорость потока в системе сети для текучей среды, на основе ограничения, включающего в себя отношение между скоростью потока текучей среды и соответствующей скоростью машины для текучей среды, при этом система управления выполнена с возможностью управлять скоростью множества машин для текучей среды, так что достигается минимальная общая мощность машин для текучей среды в системе сети для текучей среды.
В одном варианте осуществления система обработки выполнена с возможностью применять шаблон входного сигнала к множеству машин для текучей среды, чтобы тем самым изменять скорость машины для текучей среды множества машин для текучей среды, при этом шаблон входного сигнала применяется таким образом, что отношение между изменением в скорости машины для текучей среды и соответствующим изменением в скорости потока текучей среды может определяться для каждой машины для текучей среды.
В одном варианте осуществления шаблон входного сигнала является таким, что он обеспечивает возможность стабилизации потока текучей среды в системе сети для текучей среды, при этом обеспечивается отслеживание ступенек, применяемых к множеству машин для текучей среды.
В одном варианте осуществления система обработки выполнена с возможностью, чтобы определять отношение между изменением в скорости машины для текучей среды и соответствующим изменением в мощности машины для текучей среды для каждой из множества машин для текучей среды.
В одном варианте осуществления система обработки выполнена с возможностью, чтобы оценивать минимальную общую мощность машин для текучей среды, которая обеспечивает минимальную требуемую скорость потока в системе сети для текучей среды, на основе отношения между изменением в скорости машины для текучей среды и соответствующим изменением в мощности машины для текучей среды для каждой из множества машин для текучей среды с ограничением, включающим в себя отношение между скоростью потока текучей среды и соответствующей скоростью машины для текучей среды; при этом система управления выполнена с возможностью итерации оценки и управления скоростями машин для текучей среды до тех пор, когда различие между последовательными оцененными значениями минимальной общей мощности машин для текучей среды, полученными в итерационной обработке, будет меньше, чем предварительно определенное значение.
Дополнительные признаки и преимущества будут раскрыты далее.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Изобретение и его преимущества теперь будут описываться посредством неограничивающих примеров со ссылкой на сопровождающие чертежи, на которых:
Фиг.1 схематически показывает пример системы сети для текучей среды.
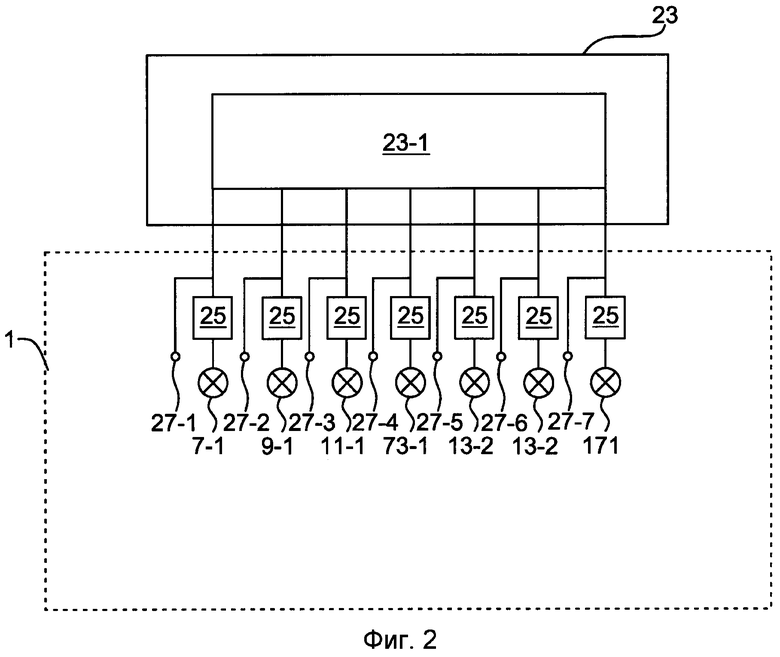
Фиг.2 является схематическим изображением блок-схемы системы управления для системы сети для текучей среды.
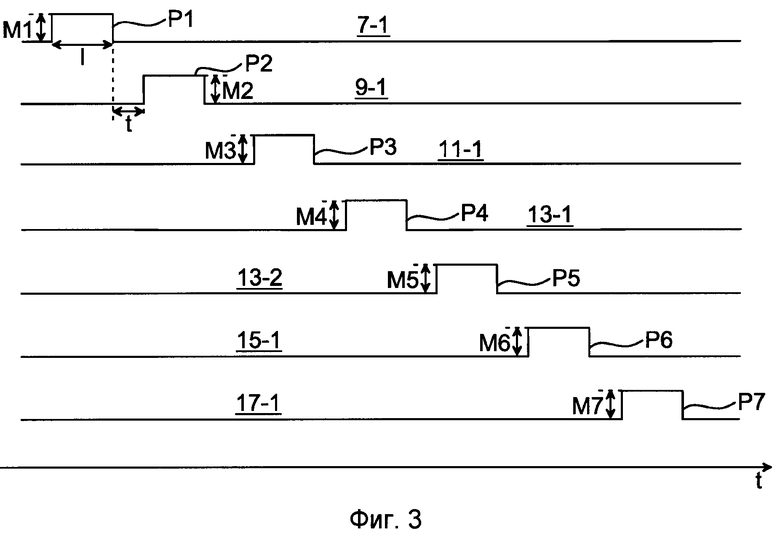
Фиг.3 является диаграммой, показывающей последовательное изменение скорости вентиляторов в системе сети для текучей среды на Фиг.1.
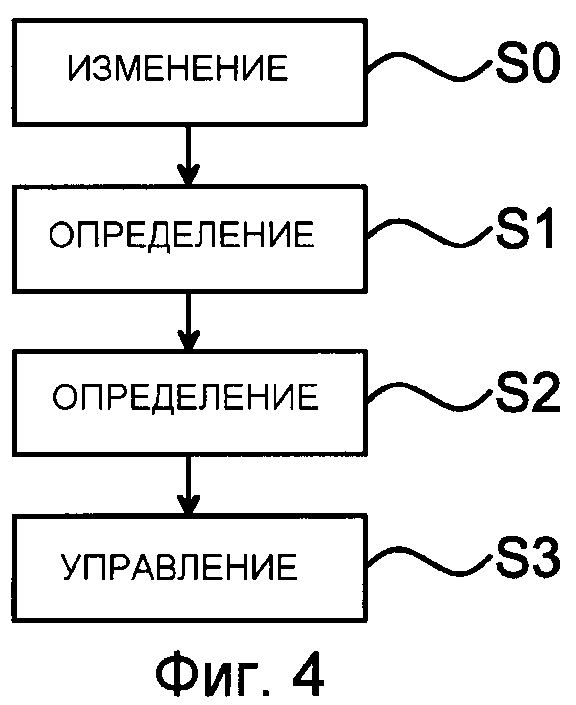
Фиг.4 является блок-схемой последовательности операций способа управления вентиляцией в системе сети для текучей среды.
ПОДРОБНОЕ ОПИСАНИЕ
В последующем описании, в целях описания и не ограничения, излагаются конкретные детали, такие как конкретные способы и приложения, чтобы обеспечивать полное понимание настоящего раскрытия. Однако для специалиста в данной области техники должно быть ясно, что настоящее раскрытие может использоваться в других вариантах осуществления, которые отходят от этих конкретных деталей. В других случаях, подробное описание хорошо известных способов и устройств пропускается с тем, чтобы не загромождать описание излишними деталями.
Настоящее раскрытие может использоваться для управления потоком текучей среды в системе сети для текучей среды, такой как вентиляционная система подземной шахты, вентиляционная система здания, централизованное теплоснабжение/холодоснабжение, дренажная система, например, для подземных шахт и аналогичных систем, как должно быть ясно специалистам в данной области техники. Только в иллюстративных целях, система сети для текучей среды будет в последующем иллюстрироваться посредством вентиляционной системы подземной шахты. Однако способы и системы, здесь раскрытые, могут равным образом хорошо осуществляться в других системах сети для текучей среды.
В общем, текучая среда, протекающая через систему сети для текучей среды, может быть газом, таким как воздух, или жидкостью, такой как вода в зависимости от приложения.
Предпочтительно, способы и системы управления, здесь представленные, обеспечивают управления машинами для текучей среды в системе сети для текучей среды таким образом, что полное потребление мощности машин для текучей среды может минимизироваться, в то время как обеспечиваемый поток текучей среды удовлетворяет минимальной требуемой скорости потока текучей среды в системе сети для текучей среды.
В зависимости от приложения, машина для текучей среды может быть вентилятором или насосом. Если приложение касается вентиляции, машины для текучей среды являются вентиляторами. Если приложение относится к управлению потоком текучей среды жидкостей, машины для текучей среды являются насосами.
В последующем раскрытии, пример приложения заявленного способа будет даваться для вентиляционной системы подземной шахты. Следует, однако, отметить, что представленные способы и системы управления также могут использоваться в других системах сети для текучей среды, как упомянуто ранее. Следует, таким образом, отметить, что описываемые ниже этапы способа и система управления, которая осуществляет способ в приложении вентиляции шахты, также могут применяться аналогичным образом в других приложениях, касающихся управления потоком как газа, так и жидкости, при этом в последнем случае вентиляторы сменяются на насосы.
Фиг.1 показывает пример инфраструктуры системы 1 сети для текучей среды, т.е. вентиляционной системы подземной шахты. Система 1 сети для текучей среды имеет подземную инфраструктуру 3 ниже поверхности 5 земли. Система 1 сети для текучей среды содержит множество стволов 7, 9 и 11. Стволы 7, 9, 11 определяют разные уровни стволов в подземной инфраструктуре 3. В представленном случае первый ствол 7 определяет первый уровень ствола. Второй ствол 9 определяет второй уровень ствола. Третий ствол 11 определяет третий уровень ствола. В каждом стволе, может быть необходимо собственное требование к скорости потока текучей среды, как проиллюстрировано посредством разных скоростей Q1, Q2 и Q3 потока текучей среды. Требуемая скорость потока текучей среды может, например, зависеть от добычных агрегатов, находящихся в стволе.
Иллюстративная система 1 сети для текучей среды дополнительно содержит нисходящий ствол 13, который простирается сверху от поверхности 5 земли и соединяется со стволами 7, 9 и 11 ниже поверхности 5 земли. Нисходящий ствол 13 имеет впускной вентилятор 13-1, который обеспечивает воздух из поверхностной атмосферы в подземную инфраструктуру 3. Нисходящий ствол 13 необязательно также имеет один или более вентиляторов 13-2 увеличения давления для увеличения давления воздуха более глубоко внизу в подземной инфраструктуре 3. Система 1 сети для текучей среды также имеет выпускной ствол воздуха, т.е. направленный вверх ствол 15, который обеспечивает отработанный воздух в поверхностную атмосферу через выпускной вентилятор 15-1. В результате, свежий воздух входит в систему 1 сети для текучей среды через впускной вентилятор 13-1 и нисходящий ствол 13, при этом свежий воздух распределяется в стволах 7, 9 и 11 согласно требованиям потока воздуха, и отработанный воздух выходит из системы 1 сети для текучей среды через направленный вверх ствол 15 и выпускной вентилятор 15-1, как показано посредством стрелок A.
Система 1 сети для текучей среды может необязательно дополнительно содержать зоны добычи, такие как зона 17 добычи, соединенная со стволом 9, и наклонные участки 19, 21. Разработка недр может выполняться в зоне 17 добычи и/или любом из стволов 7, 9 и 11. Наклонные участки 17, 19 обеспечивают возможность перемещения оборудования, такого как добычные агрегаты и подобное, с одного уровня на другой. В иллюстративной системе 1 сети для текучей среды, наклонный участок 19 соединяет третий ствол 11 со вторым стволом 9. Наклонный участок 21 соединяет второй ствол 9 с первым стволом 7.
Каждый ствол 7, 9, 11 обеспечивается соответствующим вентилятором 7-1, 9-1 и 11-1. Вентиляторы 7-1, 9-1 и 11-1 обеспечивают свежий воздух из нисходящего ствола 13 в их соответствующий ствол 7, 9, 11. Дополнительно, зона 17 добычи ассоциирована с вентилятором 17-1, который обеспечивает свежий воздух в зону 17 добычи из ствола 9, с которым соединена зона 17 добычи.
Может, конечно, быть меньше или больше стволов, направленных вверх стволов, нисходящих стволов, зон добычи и вентиляторов в подземной шахте, в которой может использоваться управление вентиляцией согласно настоящему раскрытию.
Теперь после описания упрощенного примера подземной инфраструктуры системы сети для текучей среды, далее со ссылкой на Фиг.2-4 будет описываться ее функционирование по отношению к вентиляции.
Фиг.2 показывает пример системы 23 управления для управления вентиляцией в системе 1 сети для текучей среды. Система 23 управления содержит систему 23-1 обработки. При работе система 23 управления соединяется с системой сети для текучей среды, которой она должна управлять.
Система 23 управления является примером системы управления, выполненной с возможностью определять сетевые характеристики, т.е. модель системы сети для текучей среды, такой как система 1 сети для текучей среды.
На основе определенных сетевых характеристик система 23 управления обеспечивает управление вращательной скоростью вентиляторов 7-1, 9-1, 11-1, 13-1, 13-2 и 17-1 в системе 1 сети для текучей среды таким образом, что выполняются минимальные требования к потоку текучей среды в стволах 7, 9, 11, и зоне 17 добычи и, следовательно, в системе 1 сети для текучей среды, в то время как вентиляторы 7-1, 9-1, 11-1, 13-1, 13-2 и 17-1 потребляют минимальное количество электрической мощности.
Система 23-1 обработки может быть объединенной системой, содержащей одиночный процессор для управления всеми вентиляторами системы сети для текучей среды. Альтернативно, система обработки может формировать распределенную систему с индивидуальным процессором для каждого вентилятора. Система 23-1 обработки предпочтительно осуществляется в программном обеспечении. Система 23 управления может быть аппаратным устройством, которое обеспечивает возможность пользовательского взаимодействия между, например, оператором или инженером и системой сети для текучей среды.
Система 23 управления управляет вентиляторами 7-1, 9-1, 11-1, 13-1, 13-2 и 17-1 посредством соответствующего мотора 25. Каждый мотор 25 выполнен с возможностью, чтобы приводить в действие ротор или роторы его ассоциированного вентилятора. Каждый вентилятор 7-1, 9-1, 11-1, 13-1, 13-2 и 17-1 ассоциирован с соответствующим датчиком 27-1, 27-2, 27-3, 27-4, 27-5, 27-6 и 27-7. Каждый датчик выполнен с возможностью измерять изменение скорости потока текучей среды в канале потока текучей среды, например стволе, в котором располагается соответствующий вентилятор. Например, датчик 27-1 выполнен с возможностью измерять скорость потока текучей среды в канале потока текучей среды, в котором располагается вентилятор 7-1, т.е. в стволе 7. Оставшиеся пары датчик/вентилятор расположены аналогично.
Альтернативный способ, чтобы определять изменение скорости потока текучей среды, состоит в том, чтобы измерять перепад давления по каждому вентилятору посредством соответствующего датчика и использовать характеристики вентиляторов для вентиляторов, чтобы оценивать изменения скорости потока текучей среды. Характеристики вентиляторов предпочтительно загружаются в систему обработки для этой цели.
Каждый вентилятор 7-1, 9-1, 11-1, 13-1, 13-2 и 17-1 посредством соответствующего мотора 25 выполнен с возможностью осуществления связи с системой 23 управления, и, в частности, с системой 23-1 обработки. Тем самым, система 23 управления может обеспечивать инструкции управления вентиляторам 7-1, 9-1, 11-1, 13-1, 13-2 и 17-1 относительно вращательной скорости каждого вентилятора системы 1 сети для текучей среды. Связь между системой 23 управления и вентиляторами 7-1, 9-1, 11-1, 13-1, 13-2 и 17-1 может либо быть посредством проводов, либо быть беспроводной.
Когда имеется необходимость идентифицировать сетевые характеристики системы сети для текучей среды, в которой располагается система 23 управления, как, например, во время введения в эксплуатацию системы сети для текучей среды, система 23 управления обеспечивает сигналы управления для каждого из вентиляторов 7-1, 9-1, 11-1, 13-1, 13-2, 15-1 и 17-2 на первом этапе S0, как показано на Фиг.4. Сигналы управления содержат инструкции, что каждый вентилятор должен изменить свою вращательную скорость. Инструкции предпочтительно обеспечиваются последовательным образом, так что один вентилятор за один раз изменяет свою скорость.
Изменение скорости каждого вентилятора может обеспечиваться посредством шаблонов входного сигнала от системы 23 управления. Такое изменение скорости может, например, достигаться посредством преобразователей частот для обеспечения ступенек изменения скорости в соответствующий мотор и соответствующий вентилятор, или посредством ступенчатых функций напряжения или тока от соответствующего мотора 25, когда мотор 25 принял инструкции от системы 23 управления. Ступеньки или ступенчатые функции могут быть положительными или отрицательными. Ступенька или ступенчатая функция может обеспечивать увеличение или альтернативно уменьшение в скорости вентилятора. Другие сигналы мотора нежели ступеньки или ступенчатые функции, являются также возможными для изменения скорости вентиляторов.
Когда мотор обеспечивает ступеньку в вентилятор, измеряется изменение в скорости потока текучей среды, ассоциированной с этим вентилятором. Таким образом, например, когда скорость вентилятора для вентилятора 7-1 изменяется посредством его мотора 25, соответствующее изменение в скорости потока текучей среды измеряется посредством датчика 27-1, который ассоциирован с вентилятором 7-1.
Изменение в скорости вентиляторов 7-1, 9-1, 11-1, 13-1, 13-2, 15-1 и 17-2 в одном варианте осуществления осуществляется последовательным образом, как показано на Фиг.3. Каждый вентилятор 7-1, 9-1, 11-1, 13-1, 13- 2, 15-1 и 17-2 последовательно обеспечивается соответствующей ступенькой или импульсом P1, P2, P3, P4, P5, P6 и P7.
Для целей определения сетевых характеристик, т.е. определения отношения между изменением в скорости вентилятора и соответствующим изменением в скорости потока текучей среды, величина M1-M7 ступенек не является важной. Является достаточным обеспечивать ступеньки, имеющие величину, которая обеспечивает измеримое изменение скорости потока текучей среды. Более того, каждая ступенька может иметь независимо определенную величину. Таким образом, каждая величина ступеньки может отличаться от величины других ступенек. Альтернативно, величина каждой ступеньки P1-P7 может, по существу, быть одной и той же.
Продолжительность 1 каждой ступеньки должна быть достаточно длительной для затрагиваемого вентилятора, чтобы достигать работы устойчивого состояния, т.е. состояния, где упомянутый вентилятор получил скорость, соответствующую ступеньке, примененной к вентилятору посредством мотора.
Дополнительно, время t между последовательными ступеньками должно быть достаточно длительным, так что может получаться нормальное рабочее состояние, т.е. устойчивое состояние, в котором система 1 сети для текучей среды работала до изменения какой-либо скорости вентилятора. В результате, система 23 управления ожидает достаточно долго между каждой последовательной ступенькой P1-P2, P2-P3, P3-P4, P4-P5, P5-P6 и P6-P7 с обеспечением сигналов управления в моторы 25, так что нормальное состояние может получаться между каждой ступенькой P1-P7.
Посредством изменения скоростей вентиляторов каждого из множества вентиляторов один за один раз, отношение между параметром управления ΔB, относящимся к изменению скорости вентиляторов, и изменением в скорости потока текучей среды ΔQ может определяться на этапе S1.
Альтернативно и предпочтительно, отношение между параметром управления ΔB, относящимся к изменению скорости вентиляторов, и изменением в скорости потока текучей среды ΔQ может определяться посредством изменения скорости множества вентиляторов посредством обеспечения входных сигналов в моторы и, следовательно, вентиляторы в соответствии с любым шаблоном таким образом, что для каждой ступеньки, т.е. для каждого изменения скорости вентилятора, обеспечивается стабилизация потока текучей среды в системе сети для текучей среды при отслеживании ступенек, применяемых к множеству вентиляторов.
С этой целью, когда каждый вентилятор в системе сети для текучей среды подвергается изменению скорости, уравнение (1) ниже может быть решено, так как векторы ΔB и ΔQ известны.
 (1)
(1)
ΔB является параметром управления, содержащимся в сигналах управления, обеспечиваемых системой 23 управления в вентиляторы 7-1, 9-1, 11-1, 13-1, 13-2, 15-1 и 17-2 посредством моторов 25. Вектор ΔQ содержит изменения скорости потока текучей среды, измеренные посредством всех датчиков 27-1, 27-2, 27-3, 27-4, 27-5, 27-6 и 27-7. В частности, может быть определена постоянная матрица H, которая является аппроксимацией отношения между изменениями скоростей вентиляторов и соответствующими изменениями скорости потока текучей среды. Матрица H может, например, определяться посредством способа наименьших квадратов.
Когда отношение между изменением скорости потока текучей среды и изменением в скорости вентиляторов определяется, вентиляторы могут управляться оптимальным образом, как будет описываться в последующем.
Каждый вентилятор ассоциирован с электрической мощностью E. Электрическая мощность каждого вентилятора может аналитически определяться посредством уравнения (2).
 (2)
(2)
Δp является перепадом давления для вентилятора, Q является скоростью потока текучей среды, и η является эффективностью вентилятора. Мощность E может, например, определяться из диаграмм характеристик вентиляторов, обеспеченных производителем вентиляторов. Предпочтительно, характеристики вентиляторов каждого вентилятора загружаются в память системы 23 управления.
Посредством использования выражения в уравнении (2) для мощности E каждого вентилятора или альтернативно оцененной общей мощности, вместе с ограничением, что скорость потока текучей среды Q должна равняться или быть более большой, чем минимальная требуемая скорость потока текучей среды Qreq, может определяться минимальная общая рабочая мощность вентиляторов, при том что вентиляторы 7-1, 9-1, 11-1, 13-1, 13-2, 15-1 и 17-2 доставляют достаточную скорость потока текучей среды в каждом канале потока текучей среды или стволе системы 1 сети для текучей среды. В результате, посредством минимизации выражения в уравнении (3), приведенном ниже, может определяться значение общей минимальной мощности всех вентиляторов, в то время как индивидуальное значение минимальной мощности для каждого вентилятора задано, например, посредством характеристик вентиляторов в этой точке минимума общей мощности вентиляторов.
 (3)
(3)
Целое число n является количеством вентиляторов в сети потока текучей среды. Так как  и,
и,  , уравнение (3) может быть выражено следующим образом.
, уравнение (3) может быть выражено следующим образом.
 (4)
(4)
Таким образом, минимальная мощность, которая обеспечивает минимальную требуемую скорость потока в системе сети для текучей среды, может на этапе S2 определяться посредством минимизации выражения в уравнении (4), где ограничение в выражении минимизации включает в себя отношение между скоростью потока текучей среды и соответствующей скоростью вентилятора, как определено на этапе S1.
Альтернатива вышеописанному подходу определения минимальной общей мощности вентиляторов может осуществляться следующим образом. На первом этапе отношение между изменением в мощности и изменением в скорости вентилятора для каждого вентилятора оценивается, по существу, одновременно с определением отношения между изменением в скорости вентилятора и соответствующим изменением в скорости потока текучей среды. На втором этапе, изменение общей мощности вентиляторов, т.е. сумма оцененного изменения мощности для каждого вентилятора, минимизируется с ограничением, включающим в себя отношение между скоростью потока текучей среды и соответствующей скоростью вентилятора. В результате, получается оценка минимальной общей мощности вентиляторов. Обработка определения или оценки минимальной общей мощности вентиляторов этим путем содержит оценку минимальной общей мощности вентиляторов с использованием вышеупомянутого ограничения, и затем управление скоростью вентиляторов согласно оцененной минимальной общей мощности вентиляторов, и итерацию этой обработки до тех пор, когда различие между последовательными оцененными значениями минимальной общей мощности вентиляторов, полученными в итерационной обработке, будет меньше, чем предварительно определенное значение.
Таким образом, согласно вышеописанной альтернативе, отношение в уравнении (5), приведенном ниже, определяется как
 (5)
(5)
где ΔE является вектором, описывающим изменение в мощности для каждого вентилятора, когда имеется изменение скорости в вентиляторах. Чтобы определять изменение в мощности, ΔEk, для каждого вентилятора может измеряться мощность каждого мотора, например, посредством преобразователя частот, ассоциированного с каждым вентилятором 7-1, 9-1, 11-1, 13-1, 13-2, 15-1 и 17-2.
Оценка отношения в уравнении (5) включает в себя определение постоянной матрицы K. Отношение в уравнении (5) минимизируется по отношению к одному и тому же ограничению, как представлено в уравнении (4), как показано в уравнении 6, приведенном ниже.
 (6)
(6)
Как упомянуто выше, минимизация выражения в уравнении (6) обеспечивает оцененную минимальную общую мощность вентиляторов. Вентиляторы могут управляться посредством системы 23 управления соответственно, так как ΔB, который обеспечивает оцененный минимум, является известным из минимизации, где ΔB является параметром управления, содержащимся в сигналах управления, обеспечиваемых системой 23 управления в вентиляторы 7-1, 9-1, 11-1, 13-1, 13-2, 15-1 и 17-2 посредством моторов 25. Обработка минимизации выражения в уравнении (6) итерируется вместе с этапом S3 управления скоростью множества вентиляторов 7-1, 9-1, 11-1, 13-1, 13-2, 15-1 и 17-2 до тех пор, когда различие между последовательными оцененными значениями минимальной общей мощности вентиляторов, полученными в итерационной обработке, будет меньше, чем предварительно определенное значение, т.е. когда минимизация обеспечивает только незначительно более хорошие результаты для каждой итерации.
Когда минимальная общая мощность вентиляторов определяется, система 23 управления управляет каждым вентилятором, чтобы иметь такую скорость вентиляторов, что получается минимальное или, по существу, минимальное общее потребление мощности для системы 1 сети для текучей среды. Таким образом, также в первом случае, т.е. когда минимальная общая мощность вентиляторов определяется посредством первого примера, как объяснено в отношении к уравнению (4), этап S3 выполняется, чтобы получать минимальное потребление мощности в системе 1 сети для текучей среды.
Каждый из вышеописанных этапов S0-S3 обычно выполняется посредством системы 23-1 обработки.
Настоящее раскрытие, таким образом, обеспечивает простой способ определять сетевые характеристики системы сети для текучей среды посредством эмпирического определения отношения между изменениями в скорости вентиляторов и соответствующими изменениями в скорости потока текучей среды. Предпочтительно, это отношение может использоваться, чтобы минимизировать общую мощность, которая используется вентиляторами в системе сети для текучей среды. Тем самым, может сохраняться электричество и может уменьшаться воздействие на окружающую среду. Дополнительно, более низкое потребление энергии также дает результатом более низкие затраты для операторов системы сети для текучей среды.
Специалист в данной области техники должен понимать, что настоящее раскрытие никоим образом не ограничено примерами, описанными выше. Наоборот, являются возможными многие модификации и изменения в пределах объема прилагаемой формулы изобретения.
Группа изобретений относится к системам сети для текучей среды. Технический результат - упрощение идентификации сетевых характеристик системы сети для текучей среды. Для этого представлен способ управления потоком текучей среды в системе сети для текучей среды посредством множества машин для текучей среды. Сетевые характеристики используются для обеспечения требуемой скорости потока текучей среды в системе сети для текучей среды с использованием минимальной мощности машины для текучей среды. Способ содержит этапы эмпирического определения (S1) отношения между изменением в скорости машины и соответствующим изменением в скорости потока текучей среды для каждой из множества машин; определения (S2) минимальной общей мощности машин, которая обеспечивает минимальную требуемую скорость потока в системе сети для текучей среды, на основе ограничения, включающего в себя отношение между скоростью потока текучей среды и соответствующей скоростью машины и управления (S3) скоростью множества машин, так что достигается минимальная общая мощность машин для текучей среды в системе сети для текучей среды. 3 н. и 16 з.п. ф-лы, 4 ил.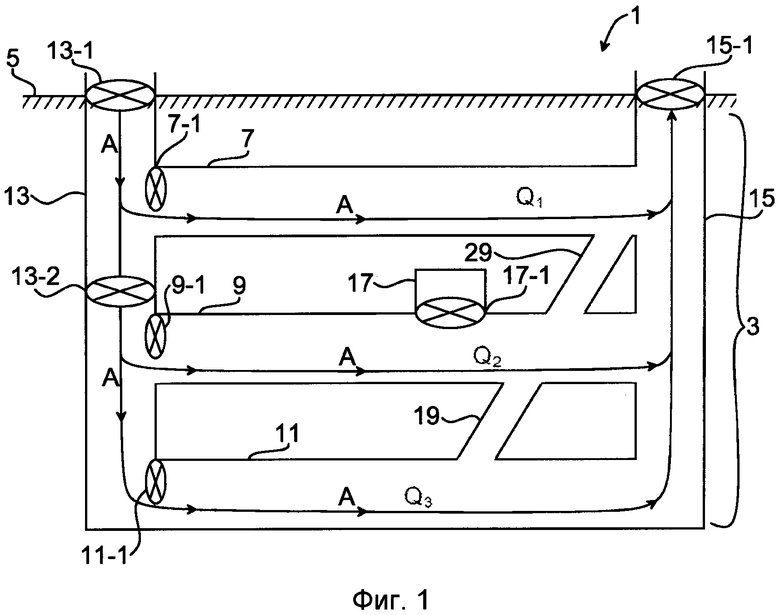
1. Способ управления потоком текучей среды в системе (1) сети для текучей среды посредством множества машин (7-1, 9-1, 11-1, 13-1, 13-2, 15-1, 17-2) для текучей среды, при этом способ содержит:
a) эмпирическое определение (S1) отношения между изменением в скорости машины для текучей среды и соответствующим изменением в скорости потока текучей среды для каждой из множества машин (7-1, 9-1, 11-1, 13-1, 13-2, 15-1, 17-2) для текучей среды,
b) определение (S2) минимальной общей мощности машин для текучей среды, которая обеспечивает минимальную требуемую скорость потока в системе (1) сети для текучей среды, на основе ограничения, включающего в себя отношение между скоростью потока текучей среды и соответствующей скоростью машины для текучей среды, и
c) управление (S3) скоростью множества машин (7-1, 9-1, 11-1, 13-1, 13-2, 15-1, 17-2) для текучей среды, так что достигается минимальная общая мощность машин для текучей среды в системе (1) сети для текучей среды.
2. Способ по п. 1, содержащий до определения отношения на этапе а) изменение (S0) скорости машины для текучей среды каждой из множества машин (7-1, 9-1, 11-1, 13-1, 13-2, 15-1, 17-2) для текучей среды.
3. Способ по п. 1 или 2, содержащий применение шаблона входного сигнала к множеству машин для текучей среды, чтобы тем самым изменять скорость машины для текучей среды множества машин для текучей среды, при этом шаблон входного сигнала применяется таким образом, что отношение между изменением в скорости машины для текучей среды и соответствующим изменением в скорости потока текучей среды может определяться для каждой машины для текучей среды.
4. Способ по п. 3, в котором шаблон входного сигнала является таким, что он обеспечивает возможность стабилизации потока текучей среды в системе (1) сети для текучей среды, при этом обеспечивается отслеживание ступенек, применяемых к множеству машин для текучей среды.
5. Способ по п. 2, в котором изменение (S0) включает в себя последовательное изменение скорости машины для текучей среды каждой из множества машин (7-1, 9-1, 11-1, 13-1, 13-2, 15-1, 17-2) для текучей среды.
6. Способ по п. 5, в котором последовательное изменение включает в себя изменение скорости машины для текучей среды каждой машины (7-1, 9-1, 11-1, 13-1, 13-2, 15-1, 17-2) для текучей среды, так что только один вентилятор (7-1, 9-1, 11-1, 13-1, 13-2, 15-1, 17-2) из множества машин для текучей среды подвергается изменению в скорости машины для текучей среды за один раз.
7. Способ по п. 5 или 6, содержащий ожидание между двумя последовательными изменениями скоростей машин для текучей среды до тех пор, когда поток текучей среды в системе сети для текучей среды возвратится в исходное состояние, в котором система сети для текучей среды работала до этапа изменения скорости машины для текучей среды.
8. Способ по п. 1, в котором этап а) содержит определение постоянной матрицы, определяющей отношение между изменением в скорости машины для текучей среды и соответствующим изменением в скорости потока текучей среды.
9. Способ по п. 1 или 6, содержащий использование характеристик вентиляторов для определения минимальной общей мощности машин для текучей среды.
10. Способ по п. 1, в котором этап b) включает в себя минимизацию суммы каждой индивидуальной мощности машины для текучей среды.
11. Способ по п. 1, в котором система (1) сети для текучей среды является вентиляционной системой подземной шахты, и при этом машины для текучей среды являются вентиляторами.
12. Способ по п. 1, в котором этап а) определения (S1) содержит определение отношения между изменением в скорости машины для текучей среды и соответствующим изменением в мощности машины для текучей среды для каждой из множества машин для текучей среды.
13. Способ по п. 12, содержащий:
на этапе b) определение:
b1) оценки минимальной общей мощности машин для текучей среды, которая обеспечивает минимальную требуемую скорость потока в системе (1) сети для текучей среды, на основе отношения между изменением в скорости машины для текучей среды и соответствующим изменением в мощности машины для текучей среды для каждой из множества машин для текучей среды с ограничением, включающим в себя отношение между скоростью потока текучей среды и соответствующей скоростью машины для текучей среды;
и после этапа с) управление:
итерацией этапа b1) оценки и этапа с) управления до тех пор, когда различие между последовательными оцененными значениями минимальной общей мощности машин для текучей среды, полученными в итерационной обработке, будет меньше, чем предварительно определенное значение.
14. Машиночитаемый носитель, содержащий компьютерную программу, содержащую компьютерный код, при этом компьютерный код, когда исполняется на компьютере, позволяет компьютеру выполнять способ по любому из пп. 1-13.
15. Система (23) управления для управления потоком текучей среды в системе (1) сети для текучей среды, содержащей множество машин (7-1, 9-1, 11-1, 13-1, 13-2, 15-1, 17-2) для текучей среды, при этом система (23) управления содержит:
систему (23-1) обработки, выполненную с возможностью эмпирически определять отношение между изменением в скорости машины для текучей среды и соответствующим изменением в скорости потока текучей среды для каждой из множества машин (7-1, 9-1, 11-1, 13-1, 13-2, 15-1, 17-2) для текучей среды, при этом система обработки выполнена с возможностью определять общую минимальную мощность, которая обеспечивает минимальную требуемую скорость потока в системе (1) сети для текучей среды, на основе ограничения, включающего в себя отношение между скоростью потока текучей среды и соответствующей скоростью машины для текучей среды,
при этом система (23) управления выполнена с возможностью управления скоростью множества машин (7-1, 9-1, 11-1, 13-1, 13-2, 15-1, 17-2) для текучей среды, так что достигается минимальная общая мощность машин для текучей среды в системе (1) сети для текучей среды.
16. Система (23) управления по п. 15, в которой система (23-1) обработки выполнена с возможностью применения шаблона входного сигнала к множеству машин (7-1, 9-1, 11-1, 13-1, 13-2, 15-1, 17-2) для текучей среды, чтобы тем самым изменять скорость машины для текучей среды из множества машин (7-1, 9-1, 11-1, 13-1, 13-2, 15-1, 17-2) для текучей среды, при этом шаблон входного сигнала применяется таким образом, что отношение между изменением в скорости машины для текучей среды и соответствующим изменением в скорости потока текучей среды может определяться для каждой машины (7-1, 9-1, 11-1, 13-1, 13-2, 15-1, 17-2) для текучей среды.
17. Система (23) управления по п. 16, в которой шаблон входного сигнала является таким, что он обеспечивает возможность стабилизации потока текучей среды в системе (1) сети для текучей среды, при этом обеспечивается отслеживание ступенек, применяемых к множеству машин для текучей среды.
18. Система (23) управления по любому из пп. 15-17, в которой система (23-1) обработки выполнена с возможностью определять отношение между изменением в скорости машины для текучей среды и соответствующим изменением в мощности машины для текучей среды для каждой из множества машин для текучей среды.
19. Система управления по п. 18, в которой система (23-1) обработки выполнена с возможностью оценивать минимальную общую мощность машин для текучей среды, которая обеспечивает минимальную требуемую скорость потока в системе (1) сети для текучей среды, на основе отношения между изменением в скорости машины для текучей среды и соответствующим изменением в мощности машины для текучей среды для каждой из множества машин для текучей среды с ограничением, включающим в себя отношение между скоростью потока текучей среды и соответствующей скоростью машины для текучей среды; при этом система управления выполнена с возможностью итерации оценки и управления скоростями машин для текучей среды до тех пор, когда различие между последовательными оцененными значениями минимальной общей мощности машин для текучей среды, полученными в итерационной обработке, будет меньше, чем предварительно определенное значение.
| US 5269660 A1, 14.12.1993 | |||
| WO 2009027815 A2, 05.03.2009 | |||
| RU 94037958 A1, 20.08.1996 | |||
| СИСТЕМА ВЕНТИЛЯЦИИ И ЕЁ КОМБИНАЦИЯ С ФАСАДОМ И ВНУТРЕННЕЙ ЧАСТЬЮ КОМНАТЫ, РАСПОЛОЖЕННОЙ РЯДОМ С ФАСАДОМ | 2004 |
|
RU2315917C2 |

