УРОВЕНЬ ТЕХНИКИ
[01] Настоящее изобретение относится к подаче текучей среды в длиннозабойную систему разработки.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[02] В одном варианте осуществления изобретения предложена длиннозабойная выемочная комбайновая система, включающая выемочный комбайн, электронный контроллер и систему распределения текучей среды. Выемочный комбайн выполнен с возможностью перемещения вдоль рудного забоя. Выемочный комбайн включает в себя корпус выемочного комбайна, режущий барабан, связанный с корпусом выемочного барабана, и форсунку, расположенную на режущем барабане. Электронный контроллер выполнен с возможностью измерения параметра производительности работы длиннозабойного выемочного комбайна. Параметр производительности соответствует местонахождению выемочного комбайна вдоль рудного забоя. Система подачи текучей среды включает в себя устройство управления потоком и электронный процессор. Устройство управления потоком находится в сообщении по текучей среде с форсункой и с источником текучей среды. Электронный процессор связан с устройством управления потоком. Электронный процессор выполнен с возможностью приема показателя параметра производительности, определения модельного потока текучей среды на основании показателя параметра производительности, задания рабочего параметра устройства управления потоком на основании модельного потока текучей среды и приведения в действие устройства управления потоком с заданным рабочим параметром.
[03] В другом варианте осуществления изобретения предложен способ управления системой подачи текучей среды для длиннозабойной выемочной комбайновой системы. Способ включает в себя определение показателя параметра производительности и определение с помощью электронного процессора модельного потока текучей среды на основании показателя параметра производительности. Параметр производительности соответствует местонахождению выемочного комбайна вдоль рудного забоя. Способ также включает в себя задание с помощью электронного процессора параметра устройства управления потоком для подачи модельного потока текучей среды через форсунку, расположенную на режущем барабане выемочного комбайна, и приведение в действие с помощью электронного процессора устройства управления потоком с заданным параметром для распыления текучей среды через форсунку. Устройство управления потоком находится в сообщении по текучей среде с форсункой и с источником текучей среды.
[04] Кроме того, в еще одном варианте осуществления предложена система распределения текучей среды для длиннозабойного выемочного комбайна. Система распределения текучей среды включает в себя устройство управления потоком и электронный процессор. Устройство управления потоком находится в сообщении по текучей среде с форсункой, расположенной на выемочном комбайне, и в сообщении по текучей среде с источником текучей среды. Электронный процессор связан с устройством управления потоком. Электронный процессор выполнен с возможностью приема показателя параметра производительности и определения модельного потока текучей среды на основании показателя параметра производительности. Кроме того, электронный процессор выполнен с возможностью задания рабочего параметра устройства управления потоком на основании модельного потока текучей среды и приведения в действие устройства управления потока с измененным параметром. Параметр производительности соответствует местонахождению выемочного комбайна вдоль рудного забоя.
[05] Другие аспекты изобретения станут очевидными при рассмотрении подробного описания и сопровождающих чертежей.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
На чертежах:
[06] фиг. 1 - вид длиннозабойной системы разработки согласно одному варианту осуществления изобретения;
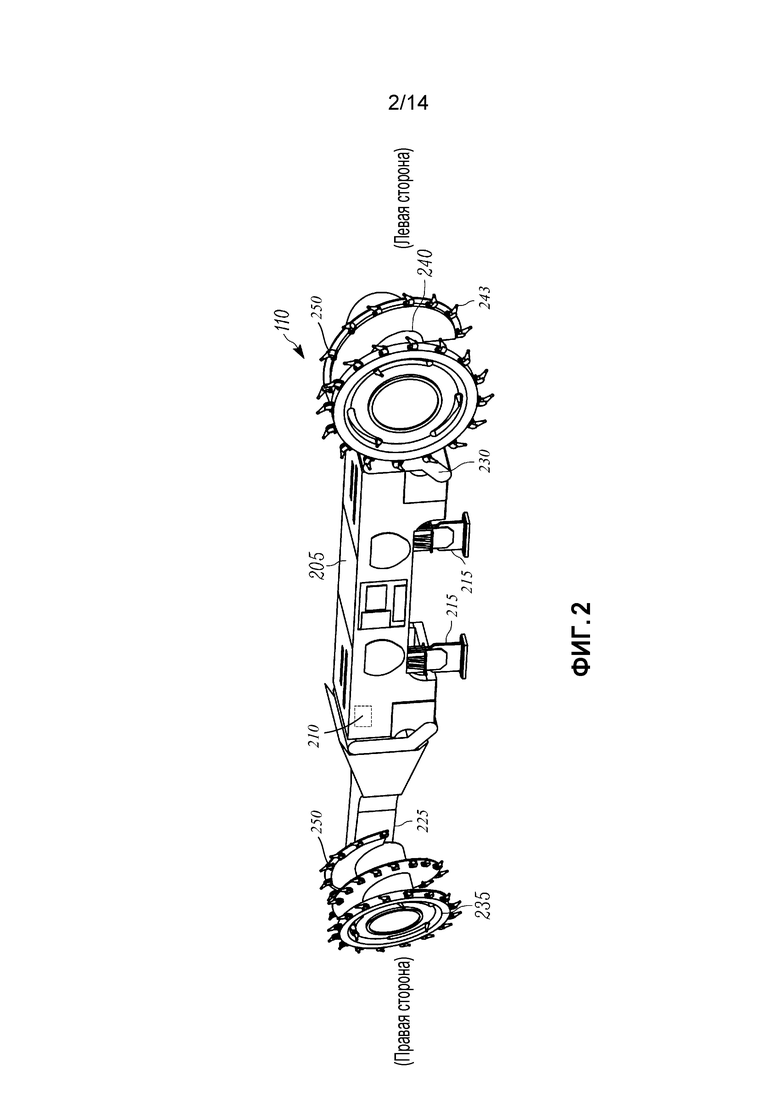
[07] фиг. 2 - перспективный вид сбоку длиннозабойного выемочного комбайна длиннозабойной системы разработки из фиг. 1;
[08] фиг. 3 - вид сбоку открытого длиннозабойного выемочного комбайна из фиг. 2;
[09] фиг. 4 - перспективный вид сверху длиннозабойного выемочного комбайна из фиг. 2;
[10] фиг. 5А-В - вид длиннозабойного выемочного комбайна при прохождении через угольный пласт;
[11] фиг. 6 - структурная схема системы управления выемочным комбайном из фиг. 2;
[12] фиг. 7 - структурная схема системы распределения текучей среды для выемочного комбайна из фиг. 2;
[13] фиг. 8 - блок-схема последовательности действий, иллюстрирующая принцип работы системы распределения текучей среды;
[14] фиг. 9 - блок-схема последовательности действий, иллюстрирующая способ регулирования устройства управления основным потоком из системы распределения текучей среды;
[15] фиг. 10 - блок-схема последовательности действий, иллюстрирующая способ определения модельного потока текучей среды для устройства управления основным потоком;
[16] фиг. 11 - блок-схема последовательности действий, иллюстрирующая способ регулирования устройства управления вторичным потоком из системы распределения текучей среды;
[17] фиг. 12 - блок-схема последовательности действий, иллюстрирующая способ определения модельного потока текучей среды для устройства управления вторичным потоком; и
[18] фиг. 13 - структурная схема забойной системы мониторинга согласно одному варианту осуществления изобретения.
ПОДРОБНОЕ ОПИСАНИЕ
[19] До подробного рассмотрения всех вариантов осуществления изобретения следует пояснить, что в случае применения изобретение не ограничено деталями конструкции и расположением компонентов, представленными в нижеследующем описании или показанными на сопровождающих чертежах. В изобретении допускаются другие варианты осуществления, применяемые на практике или реализуемые различными способами.
[20] Кроме того, следует понимать, что варианты осуществления изобретения могут включать в себя аппаратное обеспечение, программное обеспечение и электронные компоненты или модули, которые при рассмотрении могут быть иллюстративными и описываемыми так, как если бы большая часть компонентов была реализована исключительно аппаратным обеспечением. Однако специалист в данной области техники на основании чтения этого подробного описания должен признать, что в по меньшей мере одном варианте осуществления аспекты изобретения, основанные на электронике, могут входить в состав программного обеспечения (например, сохраняться на нетранзиторном машиночитаемом носителе), выполняемого одним или несколькими процессорами. В связи с этим следует отметить, что множество устройств, основанных на аппаратном обеспечении и программном обеспечении, а также множество других структурных компонентов могут использоваться для реализации изобретения. Кроме того, как описано в последующих абзацах, конкретные механические конфигурации, показанные на чертежах, предполагаются иллюстрирующими варианты осуществления изобретения. Однако возможны другие альтернативные механические конфигурации. Например, контроллеры и модули, рассматриваемые в описании, могут включать в себя стандартные компоненты обработки, такие как один или несколько процессоров, один или несколько модулей машиночитаемых носителей, один или несколько интерфейсов ввода-вывода и различные соединения (например, системную шину), соединяющие компоненты. В некоторых случаях контроллеры и модули могут быть реализованы в виде одного или нескольких процессоров общего назначения, цифровых процессоров сигналов (ЦПС), интегральных схем прикладной ориентации (ИСПО) и вентильных матриц, программируемых пользователем (ВМПП), которые выполняют инструкции или же реализуют функции, описанные в этой заявке.
[21] На фиг. 1 показана длиннозабойная система 100 разработки. Длиннозабойная система 100 разработки включает в себя длиннозабойную выемочную комбайновую систему 105 и систему 110 мониторинга. Длиннозабойная система 100 разработки выполнена с возможностью эффективного извлечения продукта или руды, например угля, из залежи. Длиннозабойная выемочная комбайновая система 105 физически извлекает рудный материал (например, уголь) из подземного месторождения и имеет связь с системой 110 мониторинга относительно работы длиннойзабойной выемочной комбайновой системы 105.
[22] Как показано на фиг. 1, длиннозабойная выемочная комбайновая система 105 включает в себя секции 115 крепи и длиннозабойный выемочный комбайн 120. Секции 115 крепи расположены параллельно рудному забою (непоказанному) и соединены помощью электрических и гидравлических соединений. Кроме того, секции 115 крепи защищают выемочный комбайн 120 от перекрывающих геологических напластований. Количество секций 115 крепи, используемых в длиннозабойной выемочной комбайновой системе 105, зависит от ширины разрабатываемого рудного забоя, поскольку секции 115 крепи обычно предназначены для защиты рудного забоя от напластований по всей ширине. Выемочный комбайн 120 продвигается вдоль рудного забоя в соответствии со скребковым забойным конвейером (СЗК) 125, который имеет специальную зубчатую рейку для выемочного комбайна 120, проходящую параллельно рудному забою между самим забоем и секциями 115 крепи. Скребковый забойный конвейер 125 также включает в себя конвейер, параллельный зубчатой рейке выемочного комбайна, так что извлекаемый рудный материал (например, уголь) может падать на конвейер для транспортировки из рудного забоя. Конвейер и зубчатая рейка скребкового забойного конвейера 125 приводятся в движение приводами 130 скребкового забойного конвейера, расположенными в главном штреке 135 и хвостовом штреке 140. Главный штрек 135 и хвостовой штрек 140 привязаны к дистальным концам скребкового забойного конвейера 125. Приводы 130 скребкового забойного конвейера позволяют конвейеру 125 непрерывно транспортировать рудный материал к главному штреку 135 (на левой стороне фиг. 1) и позволяют выемочному комбайну 120 перемещаться вдоль зубчатой рейки скребкового забойного конвейера 125 в двух направлениях через рудный забой. В зависимости от конкретного плана горных работ компоновка длиннозабойной выемочной комбайновой системы 105 может отличаться от описанной выше, например, главный штрек 135 может быть на правом дистальном конце скребкового забойного конвейера 125 и хвостовой штрек 140 может быть на левом дистальном конце скребкового забойного конвейера 125.
[23] Кроме того, длиннозабойная выемочная комбайновая система 105 включает в себя консольный перегружатель (КП) 145, расположенный перпендикулярно на конце главного штрека 135 скребкового забойного конвейера 125. Когда добытый рудный материал, транспортируемый скребковым забойным конвейером 125, достигает главного штрека 135, рудный материал направляется с поворотом на 90° на консольный перегружатель 145. В некоторых вариантах осуществления консольный перегружатель 145 сопряжен со скребковым забойным конвейером 125 под косым углом (например, не под прямым углом). В таком случае консольный перегружатель 145 подготавливает и загружает рудный материал на конвейер главного штрека (непоказанный), который транспортирует рудный материал на поверхность. Рудный материал подготавливается к загрузке в дробилке (или измельчителе) 150, в которой рудный материал разбивается для облегчения загрузки на конвейер главного штрека. Аналогично конвейеру скребкового забойного конвейера 125 конвейер консольного перегружателя 145 приводится в движение приводом консольного перегружателя (непоказанным).
[24] Система 110 мониторинга обменивается информацией с длиннозабойной выемочной комбайновой системой 105 относительно, например, физических размеров рудной залежи, скорости работы длиннозабойной выемочной комбайновой системы 105, работы системы 210 распределения текучей среды (фиг. 2) длиннозабойной выемочной комбайновой системы 105 и других рабочих функций длиннозабойной выемочной комбайновой системы 105. В некоторых вариантах осуществления с системы 110 мониторинга посылаются управляющие сигналы на длиннозабойную выемочную комбайновую систему 105 для изменения работы длиннозабойной выемочной комбайновой системы 105. Система 110 мониторинга будет описана более подробно с обращением к фиг. 6.
[25] На фиг. 2-4 показан выемочный комбайн 120. На фиг. 2 показан перспективный вид сбоку выемочного комбайна 120. Выемочный комбайн 120 включает в себя удлиненный центральный корпус 205, который содержит и защищает средства управления работой выемочного комбайна 120. В показанном варианте осуществления центральный корпус 205 также включает в себя средства управления системой распределения 210 текучей среды. Под центральным корпусом 205 находятся подкладочные башмаки 215 и захватывающие башмаки 220 (фиг. 3). Подкладочные башмаки 215 поддерживают выемочный комбайн 120 на стороне рудного забоя скребкового забойного конвейера 125 (например, стороне, ближайшей к рудному забою) и захватывающие башмаки 220 поддерживают выемочный комбайн 120 на завальной стороне скребкового забойного конвейера 125. В частности, захватывающие башмаки 220 и транспортирующие зубчатые барабаны находятся в зацеплении с зубчатой рейкой скребкового забойного конвейера 125, что позволяет выемочному комбайну 120 перемещаться вдоль скребкового забойного конвейера 125 и рудного забоя. Как также показано на фиг. 2, правый поворотный редуктор 225 и левый поворотный редуктор 230 вытянуты из центрального корпуса 205. Правый поворотный редуктор 225 и левый поворотный редуктор 230 поднимаются и опускаются гидравлической подсистемой 233 правого редуктора и гидравлической подсистемой 234 левого редуктора (фиг. 6), соответственно. Гидравлические подсистемы 233, 234 (фиг. 6) включают в себя гидравлические цилиндры, прикрепленные к нижней стороне правого поворотного редуктора 225 и левого поворотного редуктора 230, для поднятия и опускания поворотных редукторов 225, 230.
[26] Как показано на фиг. 2-4, правый поворотный редуктор 225 на своем дистальном конце поддерживает правый режущий барабан 235. По аналогии левый поворотный редуктор 230 на своем дистальном конце поддерживает левый режущий барабан 240. Каждый режущий барабан 235, 240 приводится в движение электродвигателем 245, 247 (показанным на фиг. 3), соответственно. Электродвигатели 245, 247 приводят в движение правый режущий барабан 235 и левый режущий барабан 240 через посредство зубчатых передач в поворотных редукторах 225, 230. Каждый из режущих барабанов 235, 240 включает в себя множество выемочных режущих инструментов 243 (например, режущих зубков), которые обдирают рудный забой, когда режущие барабаны 235, 240 вращаются, в результате чего срезается рудный материал. Кроме того, каждый из режущих барабанов 235, 240 включает в себя множество распылительных форсунок 250. Каждая из распылительных форсунок 250 соответствует одному из выемочных режущих инструментов 243 и поэтому распылительные форсунки 250 расположены по окружности режущих барабанов 235, 240 вблизи выемочных режущих инструментов 243. Из распылительных форсунок 250 распыляется текучая среда (например, вода) во время процесса добычи для рассеяния одного или нескольких вредных и/или горючих газов, которые появляются на участке экскавации, улавливания пыли и улучшения охлаждения. Распылительные форсунки 250 находятся в сообщении по текучей среде с системой 210 распределения текучей среды, которая регулирует количество текучей среды, распыляемой по время работы выемочного комбайна 120. На фиг. 3 показан вид сбоку открытого выемочного комбайна 120, включающего правый транспортировочный электродвигатель 255 и левый транспортировочный электродвигатель 260, которые приводят в движение выемочный комбайн 120 вдоль скребкового забойного конвейера 125.
[27] На фиг. 4 представлен перспективный вид сверху выемочного комбайна 120. Как показано на фиг. 4, выемочный комбайн 120 также включает в себя различные датчики для обеспечения автоматического управления выемочным комбайном 120 во время добычи. Например, выемочный комбайн 120 включает в себя измеритель 265 угла наклона правого поворотного редуктора, измеритель 270 угла наклона левого поворотного редуктора, датчики 275 правого транспортирующего механизма и датчики 280 левого транспортирующего механизма. В показанном варианте осуществления выемочный комбайн 120 также включает в себя датчики 285 угла наклона и угла крена. На фиг. 4 показаны приблизительные местоположения различных датчиков. В других вариантах осуществления датчики могут быть расположены на иных местах в выемочном комбайне 120. Измерители 265, 270 угла наклона обеспечивают информацию относительно угла или наклона поворотных редукторов 225, 230. В некоторых вариантах осуществления в дополнение к измерителям 265, 270 угла наклона или вместо них выемочный комбайн 120 включает в себя датчики перемещений, установленные между каждым поворотным редуктором 225, 230 и центральным корпусом 205, для получения информации относительно положения поворотных редукторов 225, 230. Датчики 275, 280 транспортирующих механизмов обеспечивают информацию относительно местонахождения выемочного комбайна 120 вдоль скребкового забойного конвейера 125, а также скорости и направления перемещения выемочного комбайна 120. В показанном варианте осуществления выемочный комбайн 120 также включает в себя правый тахометр 287, связанный с правым транспортировочным электродвигателем 255, и левый тахометр 290, связанный с левым транспортировочным электродвигателем 260. Выходные сигналы с правого тахометра 287 и левого тахометра 290 могут использоваться для оценивания скорости перемещения выемочного комбайна 120 вдоль скребкового забойного конвейера 125. В других вариантах осуществления правый тахометр 287 и левый тахометр 290 заменяют датчики 275, 280 транспортирующих механизмов. В некоторых вариантах осуществления правый тахометр 287, левый тахометр 290, датчики 275, 280 правого и левого транспортирующих механизмов определяют скорость и местонахождение выемочного комбайна 120 в соответствии с обнаружением местонахождения и/или вращения правого транспортировочного электродвигателя 255 и левого транспортировочного двигателя 260.
[28] Датчик 285 наклона и крена обеспечивает информацию относительно углового выравнивания центрального корпуса 205. Как показано на фиг. 4, наклон выемочного комбайна 120 отражает угловой поворот к рудному забою и от него, тогда как крен выемочного комбайна 120 отражает угловое смещение между правой стороной выемочного комбайна 120 и левой стороной выемочного комбайна 120, что более ясно показано осями на фиг. 4.
[29] На фиг. 5А-В показан выемочный комбайн 120, проходящий через рудный пласт (например, угольный пласт). Как показано на фиг. 5А, выемочный комбайн 120 перемещается латерально из конца в конец рудного пласта 300 в двух направлениях, хотя нет необходимости в том, чтобы выемочный комбайн 120 осуществлял выемку в двух направлениях. Например, при некоторых операциях по добыче полезных ископаемых выемочный комбайн 120 перемещается в двух направлениях вдоль рудного забоя 300, но срезает руду только при перемещении в одном направлении. В ином случае выемочный комбайн 120 может быть выполнен с возможностью извлечения одной полосы руды во время каждого из прямого прохода и обратного прохода, вследствие чего может выполнять операцию резания в двух направлениях. На фиг. 5В на виде с концевого участка забоя показан выемочный комбайн 120, когда он проходит по рудному забою 300. Как показано на фиг. 5В, правый режущий барабан 235 и левый режущий барабан 240 расположены уступами для согласования с полной высотой разрабатываемого рудного пласта. В частности, поскольку выемочный комбайн 120 перемещается горизонтально вдоль скребкового забойного конвейера 125, правый режущий барабан 235 показан срезающим руду в сторону от верхнего участка (например, верхней половины) рудного забоя 300, тогда как левый режущий барабан 240 показан срезающим в сторону от нижнего участка рудного забоя 300.
[30] В зависимости от высоты угольного пласта, правый режущий барабан 235 и левый режущий барабан 240 могут срезать неодинаковое количество добываемого материала с рудного забоя. Скорее, один из режущих барабанов 235, 240 может срезать больше или меньше добываемого материала, чем противоположный режущий барабан 235, 240. Кроме того, правый режущий барабан 235 и левый режущий барабан 240 могут срезать разные количества руды в зависимости, например, от местонахождения выемочного комбайна 120 вдоль рудного забоя 300. Например, выемочный комбайн 120 может срезать больше руды при срезании на участке линии забоя, чем при срезании на участке главного штрека или участке хвостового штрека. Участок главного штрека рудного забоя 300 относится к участку рудного забоя 300, который находится ближе всего к главному штреку 135 скребкового забойного конвейера 125. В одном примере участок главного штрека рудного забоя имеет отношение к 20 секциям 115 крепи, ближайшим к главному штреку 135 скребкового забойного конвейера 125, и участок хвостового штрека рудного забоя имеет отношение к 20 секциям 115 крепи, ближайшим к хвостовому штреку 140 скребкового забойного конвейера 125. Участок линии забоя имеет отношение к участку рудного забоя между участком главного штрека и участком хвостового штрека. Например, если длиннозабойная выемочная комбайновая система 105 включает в себя в сумме 100 секций крепи, пронумерованных 1-100, начиная с главного штрека 135, то участок рудного забоя, соответствующий 1-20 секциям крепи, относится к участку главного штрека, участок рудного забоя, соответствующий 21-80 секциям крепи, относится к участку линии забоя и участок рудного забоя, соответствующий 81-100 секциям крепи, относится к участку хвостового штрека. В некоторых вариантах осуществления участок линии забоя дополнительно подразделяется на основании, например, числового индекса, соответствующего секции крепи в этой конкретной области рудного забоя 300. Например, рудный забой может включать в себя участок главного штрека, первый участок линии забоя, второй участок линии забоя и участок хвостового штрека.
[31] На фиг. 6 представлена структурная схема системы 400 управления выемочным комбайном, предназначенной для управления работой выемочного комбайна 120. Система 400 управления выемочным комбайном включает в себя основной контроллер 405. Основной контроллер 405 включает в себя аппаратное обеспечение (например, электронный процессор) и программное обеспечение (например, сохраняемое в запоминающем устройстве основного контроллера 405) для выполнения локально сохраняемых инструкций/логических операций по управлению выемочным комбайном 120 на основании команд от оператора по радиоканалу и/или на основании команд, передаваемых с другого процессора системы 110 мониторинга, или на основании сочетаний их. Основной контроллер 405 поддерживает связь с различными датчиками 265, 270, 275, 280, 285, 287, 290 выемочного комбайна для приема выходных сигналов, показывающих местонахождение и/или перемещение выемочного комбайна 120. В основном контроллере 405 принимаемые выходные сигналы используются для формирования управляющих сигналов, подаваемых на правый транспортировочный электродвигатель 255, левый транспортировочный электродвигатель 260, гидравлическую подсистему 233 правого поворотного редуктора, гидравлическую подсистему 234 левого поворотного редуктора и систему 210 распределения текучей среды. В показанном варианте осуществления основной контроллер 405 также передает выходные сигналы датчиков с датчиков 265, 270, 275, 280, 285, 287, 290 к системе 210 распределения текучей среды. Система 210 распределения текучей среды может представлять общую рабочую информацию в основной контроллер 405. Например, основной контроллер 405 определяет, какой режущий барабан 235, 240 срезает верхний участок руды с рудного забоя, и скорость, с которой вращаются режущие барабаны 235, 240. Основной контроллер 405 также передает соответствующие сигналы к гидравлической подсистеме 233 правого поворотного редуктора, гидравлической подсистеме 234 левого поворотного редуктора, правому транспортировочному электродвигателю 255 и левому транспортировочному электродвигателю 260 для достижения заданных высот захвата и скоростей резания. В некоторых вариантах осуществления основной контроллер 405 также управляет гидравлическими системами для приведения в движение секций 115 крепи и связанного с ними оборудования (например, перекрытия механизированной крепи, распорок и т.д.). В некоторых вариантах осуществления система управления 400 выемочным комбайном может быть включена в подземную забойную систему 1005 управления (фиг. 11).
[32] На фиг. 7 представлена для примера структурная схема системы 210 распределения текучей среды. Система 210 распределения текучей среды осуществляет мониторинг и регулирование количества текучей среды (например, воды), распыляемой форсунками 250 на режущих барабанах 235, 240, на основании по меньшей мере одного параметра производительности, принимаемого, например, с системы 400 управления выемочным комбайном. Система 210 распределения текучей среды включает в себя электронный процессор 600, устройство 605 управления основным потоком, первый расходомер 610, манифольд 615 потока, набор устройств управления вторичными потоками (то есть, устройство 625 управления вторым потоком и устройство 635 управления третьим потоком), второй расходомер 620 и третий расходомер 630. На структурной схеме из фиг. 7 сплошными линиями представлены линии сообщения по текучей среде и пунктирными линиями представлены линии передачи данных и/или управляющих сигналов. Устройство 605 управления основным потоком связано с электронным процессором 600 для приема управляющих сигналов с электронного процессора 600. Устройство 605 управления основным потоком находится в сообщении по текучей среде с источником 640 текучей среды, первым расходомером 610 и манифольдом 615 потока. Когда устройство 605 управления основным потоком принимает сигнал активации с электронного процессора 600, устройство 605 управления основным потоком пропускает текучую среду из источника 640 текучей среды в манифольд 615 потока для распределения текучей среды по форсункам 250 правого режущего барабана 235 и левого режущего барабана 240. Устройство 605 управления основным потоком может быть, например, насосом с переменным числом оборотов и/или клапаном с переменным расходом. Управляющими сигналами устройству 605 управления основным потоком показывается удельная величина или расход текучей среды, проходящей из источника 640 текучей среды в манифольд 615 потока. Когда устройство 605 управления основным потоком включает в себя насос с переменным числом оборотов, управляющими сигналами может показываться рабочее число оборотов насоса с переменным числом оборотов. Когда устройство 605 управления основным потоком включает в себя клапан с переменным расходом, управляющими сигналами может показываться размер впускного отверстия клапана с переменным расходом.
[33] Манифольд 615 потока расположен между устройством 605 управления основным потоком и устройствами 625, 635 управления вторым и третьим потоками. Манифольд 615 потока получает текучую среду из устройства 605 управления основным потоком, когда устройство 605 управления основным потоком приведено в действие (то есть, открыто) с помощью управляющих сигналов с электронного процессора 600. В таком случает манифольд 615 потока распределяет текучую среду из устройства 605 управления основным потоком по первому пути 645, ведущему к форсункам 250 на правом режущем барабане 235, и второму пути 650, ведущему к форсункам 250 на левом режущем барабане 240. В частности, манифольд 615 потока пропускает текучую среду из устройства 605 управления основным потоком к устройству 625 управления вторым потоком и к устройству 635 управления третьим потоком.
[34] Устройства 625, 635 управления вторичными потоками расположены ниже по потоку от устройства 605 управления основным потоком и манифольда 615 потока. Устройство управления 625 вторым потоком связано с электронным процессором 600, соединено с манифольдом 615 потока и форсунками 250 на правом режущем барабане 235. В частности, устройство 625 управления вторым потоком расположено между манифольдом 615 потока и форсунками 250 на правом режущем барабане 235. Устройство 625 управления вторым потоком принимает управляющие сигналы с электронного процессора 600, показывающие удельную величину или расход текучей среды, проходящей к форсункам 250 на правом режущем барабане 235. На основании принимаемых управляющих сигналов устройство 625 управления вторым потоком регулирует расход из манифольда 615 потока в форсунки 250 на правом режущем барабане 235.
[35] Устройство 635 управления третьим потоком связано с электронным процессором 600, соединено с манифольдом 615 потока и форсунками 250 на левом режущем барабане 240. Устройство 635 управления третьим потоком расположено между манифольдом 615 потока и форсунками 250 на левом режущем барабане 240. Устройство 635 управления третьим потоком принимает управляющие сигналы с электронного процессора 600, показывающие удельный расход текучей среды, передаваемой в форсунки 250 на левом режущем барабане 240. На основании принимаемых управляющих сигналов устройство 635 управления третьим потоком регулирует расход из манифольда 615 потока в форсунки 250 на левом режущем барабане 240.
[36] В показанном варианте осуществления устройство 625 управления вторым потоком и устройство 635 управления третьим потоком включают в себя клапаны с переменным расходом. Однако в других вариантах осуществления устройства 625, 635 вторым и третьим потоками могут включать в себя устройства управления потоком других видов, такие как, например, насос с переменным числом оборотов. Кроме того, поскольку как устройство 625 управления вторым потоком, так и устройство 635 управления третьим потоком соединено с манифольдом 615 потока, при регулировании рабочего параметра, например, устройства 625 управления вторым потоком автоматически регулируется расход в устройство 635 управления третьим потоком. Аналогично этому, при регулировании рабочего параметра устройства 635 управления третьим потоком автоматически регулируется расход в устройство 625 управления вторым потоком.
[37] Первый расходомер 610 расположен между устройством 605 управления основным потоком и манифольдом 615 потока. Первый расходомер 610 измеряет расход основного потока из системы 210 распределения текучей среды. Первый расходомер 610 связан с электронным процессором 600 для представления в электронный процессор 600 показания расхода основного потока из системы 210 распределения текучей среды. Второй расходомер 620 расположен между манифольдом 615 потока и устройством 625 управления вторым потоком. Второй расходомер 620 измеряет расход по первому пути 645 из системы 210 распределения текучей среды. То есть, второй расходомер 620 измеряет расход текучей среды, направляемой в форсунки 250 на правом режущем барабане 235. Второй расходомер 620 также связан с электронным процессором 600 для представления показания расхода по первому пути 645 из системы 210 распределения текучей среды. Третий расходомер 630 расположен между манифольдом 615 потока и устройством 635 управления третьим потоком. Третий расходомер 630 измеряет расход по второму пути 650 из системы 210 распределения текучей среды. То есть, третий расходомер 630 измеряет расход текучей среды, направляемой в форсунки 250 на левом режущем барабане 240. Третий расходомер 630 также связан с электронным процессором 600 для представления электронному процессору показания расхода по второму пути 650 из системы 210 распределения текучей среды.
[38] Электронный процессор 600 связан с основным контроллером 405 системы управления 400 выемочным комбайном, устройством 605 управления основным потоком, первым расходомером 610, вторым расходомером 620, третьим расходомером 630, устройством 625 управления вторым потоком и устройством 635 управления третьим потоком. В показанном варианте осуществления электронный процессор 600 принимает параметры производительности с системы 400 управления выемочным комбайном (например, с основного контроллера 405). Параметрами производительности называются параметры, относящиеся к количеству руды (например, угля), которая добывается (например, извлекается). Чем больше руды добывается выемочным комбайном 120, тем большее количество вредных газов может выделяться. Поэтому, когда количество добываемой руды возрастает, система 210 распределения текучей среды также повышает расход текучей среды через форсунки 250 правого режущего барабана 235 и левого режущего барабана 240. Параметры производительности показывают электронному процессору 600 примерное количество руды, которое добывается в течение конкретного периода времени. В показанном варианте осуществления параметры производительности включают в себя, например, местонахождение выемочного комбайна 120 вдоль рудного забоя 300 (например, участок угольного забоя 300, где находится выемочный комбайн 120, в данный момент срезающий руду), скорость движения выемочного комбайна 120 вдоль рудного забоя, высоту каждого из режущих барабанов 235, 240, направление перемещения выемочного комбайна 120 вдоль рудного забоя 300 и глубину захвата выемочного комбайна 120. При более быстром перемещении выемочного комбайна 120 вдоль рудного забоя 300 большее количество руды извлекается выемочным комбайном 120. Аналогично этому, когда высота захвата каждого из режущих барабанов 235, 240 и/или глубина захвата выемочного комбайна 120 возрастает, количество извлекаемой руды также повышается. Местонахождение выемочного комбайна 120 также влияет на количество руды, извлекаемой выемочным комбайном 120. Например, когда направление выемочного комбайна 120 изменяется в главном штреке 135 или хвостовом штреке 140, выемочный комбайн 120 не извлекает столько же руды. Однако, когда выемочный комбайн проходит по остальной части рудного забоя 300 (например, участку линии забоя), выемочный комбайн 120 извлекает большее количество руды. Кроме того, при изменении направления движения выемочного комбайна 120 также изменяется количество руды, извлекаемой выемочным комбайном 120. Например, когда выемочный комбайн 120 срезает руду в одном направлении (например, срезает руду только в случае, когда он перемещается из главного штрека 135 в хвостовой штрек 140), количество руды, извлекаемой при перемещении в одном направлении, значительно больше, чем количество руды, извлекаемой при движении в противоположном направлении. В некоторых вариантах осуществления параметры производительности могут включать в себя другие параметры выемочного комбайна 120, относящиеся к количеству извлекаемой руды. На основании принимаемых параметров производительности и на основании расходов, принимаемых с первого, второго и третьего расходомеров 610, 620, 630, электронный процессор 600 генерирует управляющие сигналы для каждого из устройства 605 управления основным потоком, устройства 625 управления вторым потоком и устройства 635 управления третьим потоком.
[39] На фиг. 8 представлена блок-схема последовательности действий, иллюстрирующая способ 655 работы системы 210 распределения текучей среды. Прежде всего система управления выемочным комбайном (то есть, основной контроллер 405) и/или электронный процессор 600 системы 210 распределения текучей среды определяют (блок 670) показатели различных параметров производительности. В некоторых вариантах осуществления электронный процессор 600 системы 210 распределения текучей среды определяет показатели параметров производительности путем приема показателей параметров производительности с основного контроллера 405 и/или с датчиков 265, 270, 275, 280, 285, 287, 290 выемочного комбайна. В других вариантах осуществления электронный процессор 600 определяет показатели параметров производительности путем выполнения вычисления, основанного на выходных сигналах, принимаемых с датчиков 265, 270, 275, 280, 285, 287, 290 выемочного комбайна. Затем электронный процессор 600 осуществляет (блок 675) регулирование устройства 605 управления основным потоком на основании показателя первого параметра производительности. Электронный процессор 600 также осуществляет (блок 680) регулирование набора устройств 625, 635 управления вторичными потоками на основании показателя второго параметра производительности. При регулировании устройства 605 управления основным потоком и устройств 625, 635 управления вторичными потоками электронный процессор 600 регулирует количество текучей среды, распыляемой форсунками 250 как на правом режущем барабане 235, так и на левом режущем барабане 240.
[40] На фиг. 9 представлена блок-схема последовательности действий, иллюстрирующая способ 700 регулирования устройства 605 управления основным потоком. В частности, способ 700 можно использовать для реализации блока 675 из фиг. 8. Как описывалось относительно блока 670 из фиг. 8, электронный процессор 600 сначала определяет показатели параметров производительности. В показанном варианте осуществления электронный процессор 600 определяет скорость выемочного комбайна 120 вдоль рудного забоя 300 и местонахождение выемочного комбайна 120 вдоль рудного забоя 300. Затем на основании скорости выемочного комбайна 120 электронный процессор 600 определяет (блок 710) модельный поток текучей среды. Модельный поток текучей среды показывает желательный поток для устройства 605 управления основным потоком, при котором обеспечивается достаточное количество текучей среды для рассеяния вредных газов при снижении расхода текучей среды. Электронный процессор 600 переходит (блок 715) к заданию рабочего параметра (например, скорости насоса с переменным числом оборотов или размера отверстия клапана с переменным расходом) устройства 605 управления основным потоком на основании модельного потока текучей среды. В одном примере при задании рабочего параметра электронный процессор 600 прежде всего вычисляет изменение рабочего параметра на основании текущего потока текучей среды через систему 210 распределения текучей среды, измеряемого первым расходомером 610, вторым расходомером 620 и/или третьим расходомером 630. Затем электронный процессор 600 приводит (блок 720) в действие устройство 605 управления основным потоком с заданным рабочим параметром. Электронный процессор 600 продолжает мониторинг параметров производительности для регулирования текущего потока текучей среды из системы 210 распределения текучей среды до тех пор пока система 210 распределения текучей среды не переходит в нерабочее состояние, например, когда выемочный комбайн 120 перестает работать. Таким образом, система 210 распределения текучей среды регулирует количество текучей среды (например, воды), поступающей в форсунки 250 правого и левого режущих барабанов 235, 240, на основании измеренного параметра (параметров) производительности.
[41] На фиг. 10 представлена для примера блок-схема последовательности действий, иллюстрирующая способ 800 определения модельного потока текучей среды для устройства 605 управления основным потоком. В частности, способ 800 может использоваться для реализации блока 710 из фиг. 9. Как рассматривалось выше, в показанном варианте осуществления электронный процессор 600 определяет (блок 670 из фиг. 8) показатель скорости выемочного комбайна 120 вдоль рудного забоя 300 и показатель местонахождения выемочного комбайна 120 вдоль рудного забоя 300. Затем электронный процессор 600 определяет (блок 805) первый поток (или расход) текучей среды, соответствующий принятой скорости выемочного комбайна 120 и определяет (блок 810) отклонение величины потока (или расхода) текучей среды, соответствующее принятому местонахождению выемочного комбайна 120 вдоль рудного забоя 300. После этого электронный процессор 600 объединяет (блок 820) (например, суммирует) первый поток текучей среды с отклонением величины потока текучей среды для образования объединенного потока текучей среды. Поэтому объединенный поток текучей среды основан как на скорости выемочного комбайна 120, так и на местонахождении выемочного комбайна 120 вдоль рудного забоя 300. В одном примере модельный поток текучей среды изменяется более значительно вследствие изменения скорости выемочного комбайна 120, чем вследствие изменения местонахождения выемочного комбайна 120. Однако в других примерах изменения скорости выемочного комбайна 120 имеют такое же или меньшее влияние, чем изменения местонахождения выемочного комбайна 120 вдоль рудного забоя.
[42] В показанном варианте осуществления в соответствии с блоком 805 электронный процессор 600 обращается к первой просмотровой таблице, сохраняющей множество скоростей выемочного комбайна, связанных с соответствующими потоками текучей среды. Кроме того, в соответствии с блоком 810 электронный процессор 600 обращается к второй просмотровой таблице, сохраняющей множество местонахождений выемочного комбайна вдоль рудного забоя 300, связанных с соответствующими отклонениями величины потока текучей среды. В показанном варианте осуществления местонахождение выемочного комбайна 120 вдоль рудного забоя 300 может быть на одном из участка главного штрека, участка хвостового штрека и участка линии забоя. В показанном варианте осуществления первый поток текучей среды, основанный на скорости выемочного комбайна 120, и отклонение величины потока текучей среды, основанное на местонахождении выемочного комбайна 120 вдоль рудного забоя 300, ограничены минимальным потоком. Минимальный поток соответствует минимальному потоку текучей среды, подаваемой системой 210 распределения текучей среды в форсунки 250 на правом режущем барабане 235 и в форсунки 250 на левом режущем барабане 240. Поэтому в первой просмотровой таблице сохраняется наименьший поток текучей среды, соответствующий минимальному потоку, или в некоторых вариантах осуществления соответствующий потоку текучей среды, который больше, чем минимальный поток. Отклонение величины наименьшего потока текучей среды, сохраняемое во второй просмотровой таблице, соответствует отклонению величины потока текучей среды, при объединении которого с наименьшим потоком текучей среды, сохраняемым в первой просмотровой таблице, образуется поток текучей среды, который больше, чем минимальный поток, или равен ему.
[43] Электронный процессор 600 переходит к определению (блок 825) изменения потока текучей среды на основании объединения первого потока текучей среды, и отклонения величины потока текучей среды, и текущего потока текучей среды из системы 210 распределения текучей среды. Затем электронный процессор 600 определяет (блок 830), находится ли изменение потока текучей среды выше заданного порога минимального изменения. Заданный минимальный порог изменения обозначает минимальное ступенчатое изменение, осуществляемое устройством управления 605 основным потоком. В показанном варианте осуществления заданный порог минимального изменения находится приблизительно в пределах от одного до пяти литров в минуту. В других вариантах осуществления заданный порог минимального изменения может быть выше или ниже в зависимости, например, от технических характеристик устройства 605 управления основным потоком.
[44] Когда изменение потока текучей среды, определяемое электронным процессором 600, превышает заданный порог минимального изменения, электронный процессор 600 определяет (блок 835) модельный поток текучей среды для устройства 605 управления основным потоком на основании изменения потока текучей среды. С другой стороны, когда изменение потока текучей среды не превышает (например, равно или меньше, чем) заданный порог минимального изменения, электронный процессор 600 определяет (блок 840) модельный поток текучей среды на основании заданного порога минимального изменения. Электронный процессор 600 продолжает мониторинг параметров производительности и текущего расхода из системы 210 распределения текучей среды для обновления расхода через форсунки 250.
[45] На фиг. 11 представлена блок-схема последовательности действии способа 850 регулирования устройств 625, 635 управления вторичными потоками. В частности, способ 850 можно использовать для реализации блока 680 из фиг. 8. Как описано относительно блока 670 из фиг. 8, электронный процессор 600 прежде всего определяет показатели параметров производительности. Параметры производительности, определяемые для регулирования устройств 625, 635 управления вторичными потоками, являются иными, чем параметры производительности, используемые для регулирования устройства 605 управления основным потоком. В то время как электронный процессор 600 регулирует устройство 605 управления основным потоком на основании скорости выемочного комбайна и/или местонахождения выемочного комбайна 120 вдоль рудного забоя 300 (например, на основании первого параметра производительности), электронный процессор 600 регулирует устройства 625, 635 управления вторичными потоками на основании высоты захвата правого режущего барабана 235, высоты захвата левого режущего барабана 240, глубины захвата выемочного комбайна 120 и направления перемещения выемочного комбайна 120 (например, на основании второго параметра производительности). Поэтому при регулировании устройства 605 управления основным потоком обеспечивается возможность широких регулировок текучей среды, распыляемой форсунками 250, при независимом регулировании устройств 625, 635 управления вторым и третьим потоками на основании иных параметров производительности электронный процессор 600 более тонко регулирует текучую среду, распыляемую форсунками 250 на каждом из правого режущего барабана 235 и левого режущего барабана 240. Как рассматривалось относительно фиг. 8, эти параметры производительности могут приниматься, например, с системы 400 управления выемочным комбайном.
[46] При использовании высоты захвата правого режущего барабана 235 и левого режущего барабана 240, глубины захвата выемочного комбайна 120 и направления перемещения выемочного комбайна 120 электронный процессор 600 настраивает поток для каждого из первого пути 645 и второго пути 650 из системы 210 распределения текучей среды. Иначе говоря, на основании направления перемещения, высот захвата и глубины захвата выемочного комбайна 120 электронный процессор 600 определяет (блок 855) второй модельный поток текучей среды для первого пути 645 и определяет (блок 860) третий модельный поток текучей среды для второго пути 650. Как описывалось относительно фиг. 9, модельный поток текучей среды показывает желательный поток для устройств 625, 635 управления вторым и третьим потоками, так что достаточное количество текучей среды распыляется для рассеяния вредных газов при одновременном снижении расхода текучей среды. Электронный процессор 600 переходит (блок 865) к заданию рабочего параметра (например, размера отверстия клапана переменного регулирования) устройства 625 управления вторым потоком на основании второго модельного потока текучей среды. В одном примере электронный процессор 600 определяет изменение рабочего параметра для устройства 625 управления вторым потоком на основании модельного потока текучей среды для первого пути 645 и текущего потока текучей среды по первому пути 645, измеряемого вторым расходомером 620. Кроме того, электронный процессор 600 задает (блок 870) рабочий параметр (например, размер отверстия клапана переменного регулирования) устройства 635 управления третьим потоком на основании третьего модельного потока текучей среды. В одном примере электронный процессор 600 прежде всего задает рабочий параметр путем определения изменения рабочего параметра для устройства 635 управления третьим потоком на основании модельного потока текучей среды для второго пути 650 и текущего потока текучей среды по второму пути 650, измеряемого третьим расходомером 630. Затем электронный процессор 600 приводит в действие (блок 875) устройства 625, 635 управления вторым и третьим потоками с заданными рабочими параметрами. Кроме того, электронный процессор 600 продолжает мониторинг текущего расхода из системы 210 распределения текучей среды и параметров производительности для периодического регулирования по мере необходимости устройств управления вторым и третьим потоками до тех пор пока система 210 распределения текучей среды не переводится в неактивное состояние (например, деактивируется).
[47] На фиг. 12 представлена блок-схема последовательности действий способа 900 определения второго модельного потока текучей среды для форсунок 250 на правом режущем барабане 235 (например, для первого пути 645) и третьего модельного потока текучей среды для форсунок 250 на левом режущем барабане 240 (например, для второго пути 650). Иначе говоря, способ 900 можно использовать для реализации блоков 855 и 860 из фиг. 11. Как описано выше и относительно блока 670 из фиг. 8, электронный процессор прежде всего определяет показатели параметров производительности. Электронный процессор 600 определяет (блок 905) поток (или расход) текучей среды для форсунок 250 на правом режущем барабане 235, соответствующий принимаемым высоте захвата правого режущего барабана 235, глубине захвата выемочного комбайна 120 и направлению перемещения выемочного комбайна 120. Кроме того, электронный процессор 600 определяет (блок 910) поток (или расход) текучей среды для форсунок 250 на левом режущем барабане 240, соответствующий принимаемым высоте захвата левого режущего барабана 240, глубине захвата выемочного комбайна 120 и направлению перемещения выемочного комбайна 120. В одном примере электронный процессор 600 обращается к просмотровой таблице, сохраняющей множество высот захвата, связанных с направлением перемещения и с соответствующими потоками текучей среды. Благодаря просмотровой таблице электронный процессор 600 может определять поток текучей среды для правого режущего барабана 235 и поток текучей среды для левого режущего барабана 240. На основании найденных потоков текучей среды электронный процессор 600 определяет (блок 915) изменение потока текучей среды для форсунок 250 на правом режущем барабане 235 для получения определенного потока текучей среды, соответствующего высоте захвата правого режущего барабана 235, направлению перемещения выемочного комбайна 120 и глубине захвата выемочного комбайна 120.
[48] Другие параметры производительности иным образом влияют на поток текучей среды. В одном примере электронный процессор 600 увеличивает поток текучей среды по первому пути 645 или второму пути 650 при перемещении по направлению к главному штреку и при повышении высоты захвата выемочного комбайна 120. По аналогии электронный процессор 600 может уменьшать поток текучей среды по первому или второму пути 645, 650 при снижении высоты захвата выемочного комбайна. Однако, когда выемочный комбайн 120 перемещается к главному штреку (при этом обычно поток текучей среды увеличивается), но снижается высота захвата и/или глубина захвата выемочного комбайна 120, поток текучей среды по первому или второму пути 645, 650 может несколько уменьшаться или оставаться неизменным. Электронный процессор 600 назначает приоритеты параметрам производительности и изменяет поток текучей среды по первому или второму пути 645, 650 на основании изменения каждого параметра производительности и относительного приоритета, связанного с параметром. Иначе говоря, изменение, например, высоты захвата выемочного комбайна 120 приводит к иному изменению потока текучей среды по первому или второму пути 645, 650, чем, например, изменение направления перемещения выемочного комбайна 120. В одном примере изменения высоты захвата и/или глубины захвата выемочного комбайна 120 более значительно влияют на поток текучей среды по первому или второму пути 645, 650, чем изменения направления перемещения выемочного комбайна 120.
[49] Затем электронный процессор 600 определяет (блок 925), превышает ли изменение потока текучей среды в правый режущий барабан 235 порог минимальной дельты. Под заданным порогом минимальной дельты имеется в виду минимальное ступенчатое изменение, осуществляемое устройством 625 управления вторым потоком. В одном примере порог минимальной дельты является таким же, как порог минимального изменения из фиг. 10. В других вариантах осуществления порог минимальной дельты и порог минимального изменения соответствуют различным значениям вследствие, например, различий между устройством 605 управления основным потоком и устройствами 625, 635 управления вторичными потоками.
[50] Когда изменение потока текучей среды по первому пути 645 превышает порог минимальной дельты, электронный процессор 600 определяет (блок 930) модельный поток текучей среды для первого пути 645 при использовании изменения потока текучей среды, определенного электронным процессором 600. Однако, когда изменение потока текучей среды по первому пути 645 не превышает порог минимальной дельты, электронный процессор 600 определяет (блок 935) модельный поток текучей среды для первого пути 645 при использовании порога минимальной дельты вместо определенного изменения потока текучей среды.
[51] На основании определенного потока текучей среды для второго пути 650 электронный процессор 600 определяет (блок 940) изменение потока текучей среды по второму пути 650 для получения определенного потока текучей среды, соответствующего высоте захвата левого режущего барабана 240, направлению перемещения выемочного комбайна 120 и глубине захвата выемочного комбайна 120. Как рассматривалось выше относительно потока текучей среды для первого пути 645, различные параметры производительности могут различным образом влиять на поток текучей среды. Затем электронный процессор 600 определяет (блок 950), превышает ли изменение потока текучей среды по второму пути 650 порог минимальной дельты. Порог минимальной дельты, используемый применительно к первому пути 645, может быть таким же, как порог минимальной дельты, используемый применительно к второму пути 650, или может отличаться от него. Когда изменение потока текучей среды в левый режущий барабан 240 превышает порог минимальной дельты, электронный процессор 600 определяет (блок 955) модельный поток текучей среды для второго пути 650 при использовании определенного изменения потока текучей среды. С другой стороны, когда изменение потока текучей среды для второго пути 650 не превышает порог минимальной дельты, электронный процессор 600 определяет (блок 960) модельный поток текучей среды для второго пути 650 на основании порога минимальной дельты вместо определенного изменения потока текучей среды.
[52] Как рассматривалось выше относительно фиг. 8-12, система 210 распределения текучей среды (например, электронный процессор 600) осуществляет регулирование устройств 605, 625, 635 управления тремя различными потоками на основании различных параметров производительности. Параметры производительности принимаются с системы 400 управления выемочным комбайном (например, с основного контроллера 405) или вычисляются и/или определяются электронным процессором 600. В соответствии с регулированием устройств 605, 625, 635 управления тремя потоками система 210 распределения текучей среды выполнена с возможностью получения модельного потока текучей среды для первого пути 645 (например, к правому режущему барабану 235) и другого модельного потока текучей среды для второго пути 650 (например, к левому режущему барабану 240). Кроме того, в этом примере параметры производительности, принимаемые во внимание при регулировании устройства 605 управления основным потоком, отличаются от параметров производительности, принимаемых во внимание при регулировании устройства 625 управления вторым потоком и устройства 635 управления третьим потоком. В некоторых осуществлениях сочетание параметров производительности, используемое для регулирования устройства 605 управления основным потоком и каждого из устройств 625, 635 управления вторичными потоками, может отличаться от сочетания параметров производительности, описанного выше относительно фиг. 8-12. В общем случае устройство 605 управления основным потоком и устройства 625, 635 управления вторичными потоками регулируются при использовании различных сочетаний параметров производительности (например, первым сочетанием регулируется устройство 605 управления основным потоком, вторым сочетанием регулируется устройство 625 управления вторым потоком и третьим сочетанием регулируется устройство 635 управления третьим потоком), хотя некоторое перекрытие может встречаться в каждом из различных сочетаний.
[53] В показанном варианте осуществления система 400 управления выемочным комбайном и система распределения текучей среды связаны с системой 110 мониторинга для получения доступа к рабочим данным длиннозайбойной выемочной комбайновой системы 105 пользователям, удаленным от места добычи. На фиг. 13 представлена структурная схема забойной системы мониторинга 110, которая может использоваться для регулирования и/или мониторинга системы 210 распределения текучей среды, а также других составных частей системы 100 разработки. Забойная система 110 мониторинга связана с подземной забойной системой 1005 управления и системой 210 распределения текучей среды. В показанном варианте осуществления система 400 управления выемочным комбайном включена в подземную забойную систему 1005 управления. Кроме того, в некоторых вариантах осуществлениях система 210 распределения текучей среды может быть включена в подземную забойную систему 1005 управления.
[54] Забойная система 110 мониторинга включает в себя сетевой переключатель 1015, наземный компьютер 1020, удаленный сервер 1025 и удаленный терминал 1030. Подземная забойная система 1005 управления расположена на месте добычи и включает в себя различные компоненты и средства управления выемочным комбайном 120. В некоторых вариантах осуществления забойная система 1005 управления также включает в себя различные компоненты и средства управления секциями 115 крепи, скребковым забойным конвейером 125 и т.п. Забойная система 1005 управления имеет связь с наземным компьютером 1020 через посредство сетевого переключателя 1015 и сети Ethernet или подобной сети 1035, которые также могут находиться на месте добычи.
[55] Кроме того, система 210 распределения текучей среды имеет связь с подземной забойной системой 1005 управления и с наземным компьютером 1020 через сетевой переключатель 1015. В показанном варианте осуществления система 210 распределения текучей среды независимо связана с сетевым переключателем 1015 и подземной забойной системой 1005 управления. Однако в других вариантах осуществления система 210 распределения текучей среды может быть связана с подземной забойной системой 1005 управления, но не с сетевым переключателем 1015. Независимо от того, как связана система 210 распределения текучей среды с сетевым переключателем 1015, непосредственно или косвенно, наземный компьютер 1020, удаленный сервер 1025 и/или удаленный терминал 1030 могут иметь доступ к информации, относящейся к системе 210 распределения текучей среды (например, к параметрам производительности и/или расходам из устройства 605 управления основным потоком, устройства 625 управления вторым потоком и/или устройства 635 управления третьим потоком), и может быть выполнен с возможностью изменения параметров и/или порогов, используемых в системе 210 распределения текучей среды. В других вариантах осуществления система 210 распределения текучей среды может быть объединена с (например, частично) с подземной забойной системой 1005 управления.
[56] Через сетевой переключатель 1015 передаются данные из забойной системы 1005 управления в наземный компьютер 1020. Наземный компьютер 1020 также имеет связь с удаленным сервером 1025, который может включать в себя различные вычислительные устройства и процессоры 1040 для обработки данных, принимаемых от наземного компьютера 1020. Удаленный сервер 1025 может также включать в себя различные базы 1045 данных для хранения данных, принимаемых от наземного компьютера 1020. В удаленном сервере 1025 сохраняются и обрабатываются данные, принимаемые от наземного компьютера 1020. Удаленный сервер 1025 также обеспечивает доступ к базам 1045 данных для удаленного терминала 1030. Кроме того, в некоторых вариантах осуществления удаленный сервер 1025 может генерировать уведомления, относящиеся к работе длиннозабойной системы разработки, на основании данных, принимаемых от наземного компьютера 1020.
[57] Каждый из компонентов в системе 110 мониторинга соединен с возможностью обеспечения двунаправленной связи. Каналы связи между любыми двумя компонентами системы 110 мониторинга могут быть проводными (например, по Ethernet-кабелю или иным образом), беспроводными (например, в соответствии с протоколами Wi-Fi, сотовой связи, Bluetooth) или комбинированными. В некоторых вариантах осуществления система 400 управления выемочным комбайном и система 210 распределения текучей среды могут не поддерживать связь с системой 110 мониторинга.
[58] Различные признаки и преимущества изобретения изложены в нижеследующей формуле изобретения.













Настоящее изобретение относится к подаче текучей среды в длиннозабойную систему разработки. Длиннозабойная выемочная комбайновая система содержит выемочный комбайн, выполненный с возможностью перемещения вдоль рудного забоя, при этом выемочный комбайн включает в себя корпус выемочного комбайна, режущий барабан, соединенный с корпусом выемочного барабана, и форсунку, расположенную на режущем барабане. Первый электронный контроллер, содержащий первый процессор и первую память и выполненный с возможностью измерения параметра производительности работы длиннозабойного выемочного комбайна, при этом параметр производительности соответствует местонахождению выемочного комбайна вдоль рудного забоя и указывает примерное количество руды, которое добывается в течение конкретного периода времени. Систему подачи текучей среды, включающую устройство управления потоком в сообщении по текучей среде с форсункой и с источником текучей среды. Второй электронный контроллер, содержащий второй процессор и вторую память и соединенный с устройством управления потоком, при этом электронный контроллер выполнен с возможностью приема показателя параметра производительности, определения модельного потока текучей среды на основании показателя параметра производительности, и задания рабочего параметра устройства управления потоком на основании модельного потока текучей среды, и приведения в действие устройства управления потоком с заданным рабочим параметром. Технический результат заключается в улучшении управления потоком на основании модельного потока текучей среды. 3 н. и 16 з.п. ф-лы, 14 ил.
1. Длиннозабойная выемочная комбайновая система, содержащая
выемочный комбайн, выполненный с возможностью перемещения вдоль рудного забоя, при этом выемочный комбайн включает в себя
корпус выемочного комбайна,
режущий барабан, соединенный с корпусом выемочного барабана, и
форсунку, расположенную на режущем барабане;
первый электронный контроллер, содержащий первый процессор и первую память и выполненный с возможностью измерения параметра производительности работы длиннозабойного выемочного комбайна, при этом параметр производительности соответствует местонахождению выемочного комбайна вдоль рудного забоя и указывает примерное количество руды, которое добывается в течение конкретного периода времени;
систему подачи текучей среды, включающую
устройство управления потоком в сообщении по текучей среде с форсункой и с источником текучей среды, и
второй электронный контроллер, содержащий второй процессор и вторую память и соединенный с устройством управления потоком, при этом электронный контроллер выполнен с возможностью
приема показателя параметра производительности,
определения модельного потока текучей среды на основании показателя параметра производительности, и
задания рабочего параметра устройства управления потоком на основании модельного потока текучей среды, и
приведения в действие устройства управления потоком с заданным рабочим параметром.
2. Длиннозабойная выемочная комбайновая система по п. 1, в которой система подачи текучей среды также включает в себя
устройство управления вторым потоком, присоединенное между устройством управления первым потоком и форсункой,
в которой второй электронный контроллер также соединен с устройством управления вторым потоком и в которой второй электронный контроллер также выполнен с возможностью
приема показателя второго параметра производительности, при этом второй параметр производительности отличается от первого параметра производительности,
определения второго модельного потока текучей среды на основании показателя второго параметра производительности,
изменения второго рабочего параметра устройства управления вторым потоком на основании второго модельного потока текучей среды, и
приведения в действие устройства управления вторым потоком с измененным параметром.
3. Длиннозабойная выемочная комбайновая система по п. 2, в которой второй параметр производительности является по меньшей мере одним, выбранным из группы, состоящей из направления перемещения выемочного комбайна, высоты захвата режущего барабана выемочного комбайна и глубины захвата выемочного комбайна.
4. Длиннозабойная выемочная комбайновая система по п. 1, в которой местонахождение выемочного комбайна вдоль рудного забоя включает в себя по меньшей мере одно, выбранное из группы, состоящей из участка хвостового штрека, участка главного штрека и участка линии забоя.
5. Длиннозабойная выемочная комбайновая система по п. 1, в которой режущий барабан является первым режущим барабаном и в которой выемочный комбайн включает в себя второй режущий барабан, а вторая форсунка расположена на втором режущем барабане, и в которой система подачи текучей среды также включает в себя
устройство управления вторым потоком, соединенное с форсункой,
устройство управления третьим потоком, соединенное с второй форсункой,
манифольд, выполненный с возможностью соединения устройства управления первым потоком с устройством управления вторым потоком и устройством управления третьим потоком,
в которой второй электронный контроллер выполнен с возможностью
определения показателя второго параметра производительности, при этом второй параметр производительности связан с первым режущим барабаном,
определения показателя третьего параметра производительности, при этом третий параметр производительности связан с вторым режущим барабаном,
определения второго модельного потока текучей среды на основании второго параметра производительности,
определения третьего модельного потока текучей среды на основании третьего параметра производительности, при этом третий модельный поток текучей среды отличается от второго модельного потока текучей среды,
изменения первого рабочего параметра устройства управления второй текучей средой в соответствии с моделью второго потока текучей среды,
изменения второго рабочего параметра устройства управления третьей текучей средой в соответствии с моделью третьего потока текучей среды,
приведения в действие устройства управления второй текучей средой и устройства управления третьей текучей средой с измененными параметрами.
6. Длиннозабойная выемочная комбайновая система по п. 5, в которой второй параметр производительности включает в себя высоту захвата первого режущего барабана и в которой второй электронный контроллер повышает второй модельный поток текучей среды при направлении перемещения выемочного комбайна к главному штреку и при возрастании высоты захвата выемочного комбайна.
7. Длиннозабойная выемочная комбайновая система по п. 1, в которой первый режущий барабан включает в себя множество выемочных режущих инструментов, расположенных по окружности на первом режущем барабане, и множество форсунок, расположенных по окружности на первом режущем барабане так, что каждая форсунка соответствует выемочному режущему инструменту из множества режущих зубцов.
8. Способ управления системой подачи текучей среды для длиннозабойной выемочной комбайновой системы, при этом способ содержит этапы, на которых:
определяют показатель параметра производительности, при этом параметр производительности соответствует местонахождению выемочного комбайна вдоль рудного забоя и указывает примерное количество руды, которое добывается в течение конкретного периода времени;
определяют с помощью электронного процессора модельный поток текучей среды на основании показателя параметра производительности;
задают с помощью электронного процессора параметр устройства управления потоком на основании модельного потока текучей среды, при этом устройство управления потоком находится в сообщении по текучей среде с форсункой, расположенной на режущем барабане выемочного комбайна, и с источником текучей среды; и
приводят в действие с помощью электронного процессора устройство управления потоком с заданным параметром для распыления текучей среды через форсунку.
9. Способ по п. 8, в котором также определяют с помощью электронного процессора показатель второго параметра производительности, при этом второй параметр производительности отличается от первого параметра производительности;
определяют второй модельный поток текучей среды на основании показателя второго параметра производительности;
осуществляют изменение второго рабочего параметра устройства управления вторым потоком, присоединенного между устройством управления первым потоком и форсункой, на основании второго модельного потока текучей среды; и
приводят в действие устройство управления вторым потоком с измененным параметром.
10. Способ по п. 8, в котором также
определяют с помощью электронного процессора показатель второго параметра производительности, при этом второй параметр производительности связан с первым режущим барабаном выемочного комбайна;
определяют показатель третьего параметра производительности, при этом третий параметр производительности связан с вторым режущим барабаном выемочного комбайна;
определяют второй модельный поток текучей среды на основании второго параметра производительности;
определяют третий модельный поток текучей среды на основании третьего параметра производительности, при этом третий модельный поток текучей среды отличается от второго модельного потока текучей среды;
осуществляют изменение первого рабочего параметра устройства управления второй текучей средой, соединенного с первой форсункой, расположенной на первом режущем барабане выемочного комбайна;
осуществляют изменение второго рабочего параметра устройства управления третьей текучей средой, соединенного с второй форсункой, расположенной на втором режущем барабане выемочного комбайна; и
приводят в действие устройство управления второй текучей средой и устройства управления третьей текучей средой с измененными параметрами.
11. Способ по п. 10, в котором определение второго модельного потока текучей среды включает в себя повышение второго модельного потока текучей среды при направлении перемещения выемочного комбайна к главному штреку и при возрастании высоты захвата первого режущего барабана.
12. Система подачи текучей среды к длиннозабойному выемочному комбайну, содержащая:
устройство управления потоком в сообщении по текучей среде с форсункой, расположенной на выемочном комбайне, и в сообщении по текучей среде с источником текучей среды;
второй электронный контроллер, содержащий второй процессор и вторую память и связанный с устройством управления потоком, при этом второй электронный контроллер выполнен с возможностью
приема показателя параметра производительности, при этом параметр производительности соответствует местонахождению выемочного комбайна вдоль рудного забоя и указывает примерное количество руды, которое добывается в течение конкретного периода времени,
определения модельного потока текучей среды на основании показателя параметра производительности,
задания рабочего параметра устройства управления потоком на основании модельного потока текучей среды, и
приведения в действие устройства управления потоком с заданным рабочим параметром.
13. Система подачи текучей среды по п. 12, также содержащая
устройство управления вторым потоком, присоединенное между устройством управления первым потоком и форсункой,
в которой второй электронный контроллер также связан с устройством управления вторым потоком и в которой второй электронный контроллер также выполнен с возможностью
приема показателя второго параметра производительности, при этом второй параметр производительности отличается от первого параметра производительности,
определения второго модельного потока текучей среды на основании показателя второго параметра производительности,
изменения второго рабочего параметра устройства управления вторым потоком на основании второго модельного потока текучей среды, и
приведения в действие устройства управления вторым потоком с измененным параметром.
14. Система подачи текучей среды по п. 13, в которой второй параметр производительности является по меньшей мере одним, выбранным из группы, состоящей из направления перемещения выемочного комбайна, высоты захвата режущего барабана выемочного комбайна и глубины захвата выемочного комбайна.
15. Система подачи текучей среды по п. 12, в которой местонахождение выемочного комбайна вдоль рудного забоя включает в себя по меньшей мере одно, выбранное из группы, состоящей из участка хвостового штрека, участка главного штрека и участка линии забоя.
16. Система подачи текучей среды по п. 12, в которой режущий барабан является первым режущим барабаном, при этом система подачи текучей среды также включает в себя
устройство управления вторым потоком, соединенное с форсункой,
устройство управления третьим потоком, соединенное с второй форсункой, расположенной на втором режущем барабане выемочного комбайна,
манифольд, соединяющий устройство управления первым потоком с устройством управления вторым потоком и устройством управления третьим потоком,
в которой второй электронный контроллер выполнен с возможностью
определения показателя второго параметра производительности, при этом второй параметр производительности связан с первым режущим барабаном,
определения показателя третьего параметра производительности, при этом третий параметр производительности связан с вторым режущим барабаном,
определения второго модельного потока текучей среды на основании второго параметра производительности,
определения третьего модельного потока текучей среды на основании третьего параметра производительности, при этом третий модельный поток текучей среды отличается от второго модельного потока текучей среды,
изменения первого рабочего параметра устройства управления вторым потоком в соответствии с вторым модельным потоком текучей среды,
изменения второго рабочего параметра устройства управления третьим потоком в соответствии с третьим модельным потоком текучей среды, и
приведения в действие устройства управления вторым потоком и устройством управления третьим потоком с измененными параметрами.
17. Система подачи текучей среды по п. 16, в которой второй электронный контроллер повышает по меньшей мере один, выбранный из группы, состоящей из второго модельного потока текучей среды и третьего модельного потока текучей среды при направлении перемещения к главному штреку и при возрастании высоты захвата выемочного комбайна.
18. Система подачи текучей среды по п. 12, в которой второй электронный контроллер выполнен с возможностью определения модельного потока текучей среды путем
определения первого потока текучей среды на основании показателя параметра производительности;
определения второго потока текучей среды на основании скорости перемещения выемочного комбайна вдоль рудного забоя;
определения результирующего изменения потока текучей среды на основании первого потока текучей среды и второго потока текучей среды;
определения модельного потока текучей среды на основании результирующего изменения потока текучей среды.
19. Система подачи текучей среды по п. 18, в которой второй электронный контроллер также выполнен с возможностью
определения, превышает ли результирующее изменение текучей среды порог минимального изменения,
определения модельного потока текучей среды на основании результирующего изменения потока текучей среды при превышении результирующим изменением порога минимального изменения; и
определения модельного потока текучей среды на основании порога минимального изменения, когда результирующее изменение меньше, чем порог минимального изменения, или равно ему.
| ПРОДВИЖЕНИЕ СИСТЕМЫ СПЛОШНОЙ ОТКРЫТОЙ РАЗРАБОТКИ | 2011 |
|
RU2571463C2 |
| US 20100237683 А1, 23.09.2010 | |||
| US 9046895 B2, 02.06.2015 | |||
| US 4921306 A1, 01.05.1990 | |||
| US 5518299 A, 21.05.1996. | |||

