ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к визуализации информации об объекте, в частности к способу визуализации информации об объекте исследования, устройству для визуализации, медицинской системе изображения для визуализации и также к элементу компьютерной программы и машиночитаемому носителю.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Для визуализации информации о положении объекта, например пациента, известно наложение двухмерных живых изображений на предоперационные изображения. Данные предоперационных изображений содержат информацию, например, о сосудистой структуре, в то время как 2D живое изображение предоставляет информацию о текущем положении. Например, в документе WO 2008/107814А1, описывается способ для предоставления пользователю такой информации. Однако информация, представленная таким образом, обеспечивает только ограниченную информацию, например для указания для сердечно-сосудистого вмешательства. Однако с развитием новых процедур обследования и обработки, например для процедур сердечно-сосудистых вмешательств, особенно для сложных процедур, таких как абляции и имплантации устройств в кардиоэлектрофизиологии, потребность в предоставленной информации постоянно возрастает.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Таким образом, может быть необходимо обеспечить пользователю пространственную информацию и в дополнение особые данные о положении, в то же время гарантируя повышенную воспринимаемость.
В настоящем изобретении это решается с помощью объектов независимых пунктов формулы, причем дополнительные варианты осуществления включены в зависимые пункты формулы.
Следует отметить, что последующие описанные аспекты изобретения применяются также к устройству для визуализации информации об объекте исследования, медицинской системе изображения для визуализации информации об объекте исследования, элементу компьютерной программы и к машиночитаемому носителю.
В соответствии с примерным вариантом осуществления изобретения представлен способ визуализации информации об объекте исследования, который содержит следующие этапы:
а) предоставление предварительных навигационных данных области исследования объекта, причем предварительные навигационные данные содержат пространственные геометрические данные и поверхность функциональных параметров, в соответствии с пространственными геометрическими данными;
b) получение данных живого изображения области исследования;
с) обнаружение элемента в данных живого изображения;
d) определение пространственного отношения предварительных навигационных данных и данных живого изображения;
е) определение положения обнаруженного элемента в пространственных геометрических данных, причем это определение основано на пространственном отношении, и вычисление заранее заданной соответствующей точки местоположения на поверхности функциональных параметров;
f) генерирование комбинации упрощенного представления поверхности области исследования, где упрощенное представление поверхности основано на визуализации поверхности функциональных параметров, и маркера, указывающего вычисленную заранее заданную соответствующую точку местоположения; и
g) отображение комбинации как навигационного указания.
В соответствии с дополнительным примерным вариантом осуществления изобретения представлено устройство, содержащее блок обработки, блок интерфейса и дисплей.
Блок интерфейса предназначен для предоставления предварительных навигационных данных об области исследования объекта, причем предварительные навигационные данные содержат пространственные геометрические данные и поверхность функциональных параметров, в соответствии с пространственными геометрическими данными. Блок интерфейса дополнительно предназначен для предоставления данных живого изображения области исследования.
Блок обработки предназначен для обнаружения элемента в данных живого изображения. Блок обработки дополнительно предназначен для определения пространственного отношения предварительных навигационных данных и данных живого изображения. Блок обработки также предназначен для определения положения обнаруженного элемента в пространственных геометрических данных, при этом определение основывается на пространственном отношении, и для вычисления заранее заданной соответствующей точки местоположения на поверхности функциональных параметров. Блок обработки также дополнительно предназначен для генерирования комбинации упрощенного представления поверхности области исследования, при этом упрощенное представление поверхности основано на визуализации поверхности функциональных параметров, и маркера, указывающего вычисленную заранее заданную соответствующую точку местоположения.
Дисплей предназначен для отображения комбинации в качестве навигационного указания.
В соответствии с дополнительным примерным вариантом осуществления изобретения представлена медицинская система изображения для визуализации информации объекта исследования, содержащая устройство, в соответствии с вышеупомянутым примерным вариантом осуществления, и средство захвата изображения. Средство захвата изображения предназначено для захвата данных живого изображения.
Можно видеть, что сущность изобретения заключается как в предоставлении пространственной информации, так и функциональной информации. Оба типа информации представлены в одном изображении в форме навигационного указания. Чтобы дать возможность быстрого понимания, которое не требовало бы со стороны пользователя большого воображения, выбирается упрощенное представление поверхности, при котором визуализируется поверхность функциональных параметров, а маркер обеспечивает пространственную информацию о текущей ситуации.
Эти и другие аспекты настоящего изобретения станут понятны и очевидны со ссылкой на примерные варианты осуществления, описанные здесь далее.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Примерные варианты осуществления изобретения будут описаны дополнительно со ссылкой на последующие чертежи:
Фиг.1 иллюстрирует систему медицинского изображения с устройством в соответствии с примерным вариантом изобретения.
Фиг.2 схематически иллюстрирует основные этапы примерного варианта осуществления изобретения.
Фиг. 3-8 показывают этапы способа дополнительных примерных вариантов осуществления.
Фиг.9 схематически описывает дополнительный примерный вариант осуществления изобретения.
Фиг.10-20 показывают примерные варианты осуществления навигационного указания, предоставленного пользователю в соответствии с изобретением.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Фиг.1 схематически показывает медицинскую систему 10 изображения для использования в сердечно-сосудистой лаборатории, например. Медицинская система 10 изображения для визуализации информации об объекте исследования содержит средство 12 захвата изображения. Например, средство 12 захвата изображения представляет собой рентгеновское средство захвата изображения, снабженное источником рентгеновского излучения 14, чтобы генерировать рентгеновское излучение, указанное рентгеновским лучом 16. Дополнительно, модуль 18 обнаружения рентгеновского изображения расположен напротив источника рентгеновского излучения 14 таким образом, что, например, в течение процедуры облучения, объект, например пациент 20, может быть расположен между источником рентгеновского излучения 14 и модулем 18 обнаружения. Дополнительно, стол 22 предназначен для приема обследуемого объекта, т.е. пациента 20.
В соответствии с другим примерным вариантом осуществления, хотя и не показанным, медицинская система 10 изображения содержит средство 12 захвата изображения в виде ультразвукового средства захвата изображения. Конечно, в случае ультразвукового средства захвата изображения источник рентгеновского излучения, рентгеновский луч 16 так же, как модуль 18 обнаружения изображения, заменяются ультразвуковым преобразователем, излучающим ультразвуковые волны на объект, например на пациента, и принимающим отраженные ультразвуковые волны.
В соответствии с дополнительным примерным вариантом осуществления средство 12 захвата изображения захватывает пространственные геометрические данные с помощью MR (получение изображения с помощью магнитного резонанса MRI) или NMRI (получение изображения с помощью ядерного магнитного резонанса). Конечно, другое ядерное получение изображения, такое как SPECT (однофотонная эмиссионная компьютерная томография) или РЕТ (позитронная эмиссионная томография), также представлено в примерных вариантах осуществления изобретения (не показаны).
Дополнительно, медицинская система 10 изображения на Фиг.1 содержит устройство 24 для визуализации информации об объекте. Устройство 24 содержит блок 26 обработки, блок 28 интерфейса и дисплей 30.
Блок 28 интерфейса предназначен для предоставления предварительных навигационных данных области исследования объекта, где предварительные навигационные данные содержат пространственные геометрические данные и поверхность функциональных параметров, в соответствии с пространственными геометрическими данными. Блок 28 интерфейса дополнительно предназначен для предоставления данных живого изображения области исследования.
Блок 26 обработки предназначен для обнаружения элемента в данных живого изображения. Блок 26 обработки также предназначен для определения пространственного отношения предварительных навигационных данных и данных живого изображения. Блок 26 обработки также предназначен для определения положения обнаруженного элемента в пространственных геометрических данных, причем это определение основывается на пространственном отношении, и для вычисления заранее заданной соответствующей точки местоположения на поверхности функциональных параметров. Блок 26 обработки также дополнительно предназначен для генерирования комбинации упрощенного представления поверхности области исследования, причем упрощенное представление поверхности основывается на визуализации поверхности функциональных параметров, и маркера, указывающего вычисленную заранее заданную соответствующую точку местоположения.
Дисплей 30 предназначен для отображения комбинации как навигационного указания.
Дополнительно, средство 12 захвата предназначено для захвата данных живого изображения.
Данные захваченного живого изображения затем передаются в блок 28 интерфейса, который указан первой соединяющей линией 32 (линией связи). Блок 28 интерфейса затем обеспечивает данные живого изображения блоку обработки, который указан второй соединяющей линией 34. Генерированная комбинация обеспечивается блоком 26 обработки на дисплей 30, который указан третьей соединяющей линией 36. Конечно, связь данных вышеупомянутых блоков и средств может быть также реализована беспроводным соединением.
Отметим, что показанный пример представляет собой так называемое устройство захвата СТ-изображения. Конечно, изобретение также относится к другим типам рентгеновских средств захвата изображения, таким как рентгеновское устройство захвата изображения с С-рамой вместо круглой гентри, как показано на Фиг.1.
Процедура в соответствии с изобретением описана более подробно ниже со ссылкой на Фиг.2.
Сначала, на этапе 112 обеспечения, обеспечивают предварительные навигационные данные 114 области исследования объекта 22. Предварительные навигационные данные 114 содержат пространственные геометрические данные 116 и поверхность 118 функциональных параметров, в соответствии с пространственными геометрическими данными 116, где термин «соответствие» относится к пространственному соответствию.
Дополнительно, на этапе 120 захвата, получают данные 122 живого изображения области исследования.
На этапе 124 обнаружения, обнаруживают элемент 126 в живом изображении.
Дополнительно, на этапе 128 определения, определяют пространственное отношение 130 предварительных навигационных данных 114 и данных 122 живого изображения.
На другом этапе, обеспечивают подэтап 132 определения, на котором определяют положение 134 обнаруженного элемента в пространственных геометрических данных, причем это определение основано на пространственном отношении 130. Дополнительно, на подэтапе 136 вычисления, вычисляют заранее заданную соответствующую точку местоположения 138 на поверхности 118 функциональных параметров.
Затем, на этапе 140 генерирования, генерируют комбинацию 142 упрощенного представления 144 поверхности области исследования, причем упрощенное представление 144 поверхности основано на визуализации поверхности 118 функциональных параметров. Дополнительно, на этапе 140 генерирования, генерируют маркер 146, указывающий вычисленную заранее заданную соответствующую точку местоположения 138.
На этапе 148 отображения, отображают комбинацию как навигационное указание 150.
Отметим, что этапы, описанные выше, на Фиг.2 показаны только в качестве примерного порядка выполнения этапов. Конечно, другие порядки этапов также возможны. Например, этап d) выполняется перед этапом с). Еще дополнительно, этапы а) и b) захвата обеспечивают данные изображения, которые уже совмещены друг с другом. В этом случае дополнительное определение пространственного отношения, как на этапе d), уже больше не требуется.
Согласно дополнительному аспекту этапы могут быть повторены постоянно с заранее заданной частотой.
Как упоминалось выше, пространственные геометрические данные могут быть получены с помощью компьютерной томографии.
В соответствии с другим аспектом пространственные геометрические данные получают с помощью ультразвука.
В соответствии с дополнительным аспектом пространственные геометрические данные 116 получают с помощью магнитно-резонансной томографии или ядерно-магнитной резонансной томографии. Пространственные геометрические данные могут быть также получены с помощью ядерной томографии, такой как однофотонная эмиссионная компьютерная томография или позитронная эмиссионная томография.
В соответствии с дополнительным аспектом пространственные геометрические данные 116 содержат трехмерную информацию, т.е. объемную информацию об области исследования.
В соответствии с дополнительным аспектом пространственные геометрические данные также содержат временную информацию. Другими словами, в качестве пространственных геометрических данных представлены данные 3D+t изображения или данные 4D изображения.
В соответствии с одним аспектом изобретения поверхность функциональных параметров содержит вид типа «бычий глаз», который показан и описан ниже.
В соответствии с дополнительным аспектом поверхность функциональных параметров содержит вид трехмерного сита.
В соответствии с дополнительным аспектом функциональные параметры относятся к местоположениям анатомических структур объекта, т.е. пациента.
В соответствии с дополнительным аспектом поверхность функциональных параметров находится в известном пространственном отношении к пространственным геометрическим данным.
Например, для регистрации пространственных геометрических данных и поверхности функциональных параметров используется одно и то же средство получения изображения для захвата пространственных геометрических данных и поверхности функциональных параметров.
В соответствии с другим аспектом изобретения используются разные средства получения изображения для захвата пространственных геометрических данных и поверхности функциональных параметров.
Отметим, что в контексте описания настоящего изобретения этап обеспечения 112 также рассматривается как этап a), этап 120 получения - как этап b), этап 124 обнаружения - как этап с), этап 128 определения - как этап d), этап 132 определения - как этап е), этап 140 генерирования - как этап f) и этап 148 отображения - как этап g).
В соответствии с дополнительным аспектом изобретения объект исследования содержит трубчатую структуру, например сосудистую структуру. Например, активная область поиска является способами расширенного указания или процедурами сердечно-сосудистых вмешательств. В особенности, для сложных процедур, таких как абляции или имплантации устройств в сердечной электрофизиологии (ЕР), в соответствии с изобретением информация о предварительном процедурном изображении может быть зарегистрирована и наложена на рентгеновские изображения для вмешательства.
В соответствии с одним аспектом изобретения местоположение элемента, например катетера, направляющего провода или проводника, визуализируется по отношению к целевым зонам для абляции или размещения провода кардиостимулятора.
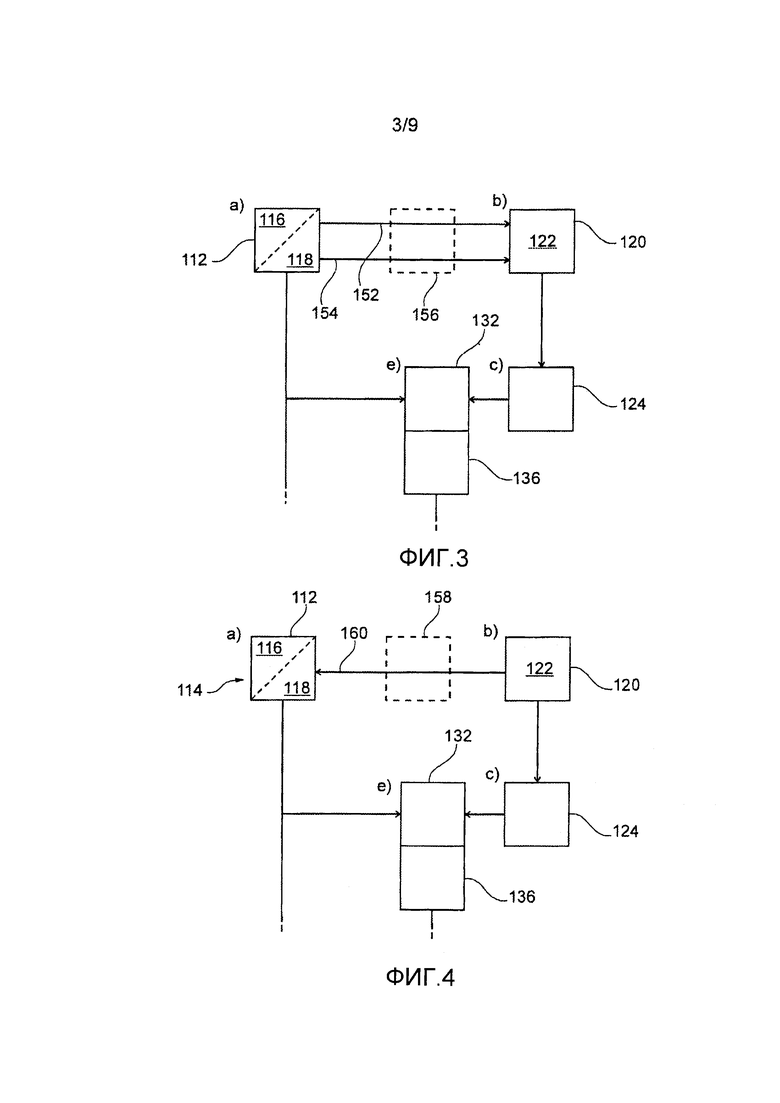
В соответствии с дополнительным аспектом поверхность 118 функциональных параметров и пространственные геометрические данные 116 этапа 112 предоставления, каждая, регистрируются в данных 122 живого изображения этапа 120 получения, который указан первой стрелкой 152 и второй стрелкой 154. Этап регистрации двух типов данных дополнительно обозначается прямоугольником, перекрывающимся с первой и второй стрелками 152, 154, причем этот прямоугольник показан пунктирной линией и указан ссылочным номером 156.
В соответствии с одним аспектом изобретения, для кардиологической проверки, функциональные параметры поверхности 118 функциональных параметров содержат, например, по меньшей мере, одну из групп или их комбинацию, содержащую местоположение рубца и бляшки, механическую функцию, электрическое возбуждение, перфузию/жизнеспособность или другие. Функциональные параметры могут также содержать любую комбинацию параметров, вычисленную на их основании.
Поскольку элемент 126 обнаруживают в данных 122 живого изображения, в соответствии с дополнительным аспектом элемент может также быть видимым в пространственных геометрических данных 116.
В отношении этапа b), в соответствии с одним аспектом изобретения данные 122 живого изображения содержат данные 2D изображения, например 2D флюороскопические изображения.
В соответствии с дополнительным аспектом данные 122 живого изображения также содержат пространственные геометрические данные.
В отношении этапа с), обнаружение 124 содержит отслеживание элемента в последовательности живых изображений, захваченных на этапе b).
В соответствии с одним аспектом изобретения элемент вынужден перемещаться внутри подобъема области исследования, например внутри трубчатой структуры такой, как сосудистое дерево. Это обеспечивает то преимущество, что в случае, когда получают такой подобъем в данных захваченного живого изображения, например путем анализа изображения, этот элемент может быть расположен только внутри такого объема, как сосудистое дерево, например, что ведет к улучшению обнаружения элемента.
В отношении этапа d), определение 128 может содержать проекционное преобразование 158 элемента в данных живого изображения в пространственные геометрические данные, которое указано с помощью прямоугольника преобразования, показанного прерывистой линией и стрелкой 160 от этапа b) до этапа а), т.е. от прямоугольника 120 захвата до прямоугольника 112 предоставления.
В соответствии с дополнительным аспектом этап d) содержит регистрацию пространственных геометрических данных 116 и данных 122 живого изображения.
В соответствии с дополнительным аспектом этап d) содержит 2D-3D регистрацию, основанную, по меньшей мере, на трех маркерных точках, которые определяются в данных живого изображения и которые определяются в пространственных геометрических данных (не показано).
В соответствии с дополнительным аспектом этап d) содержит регистрацию, основанную на интенсивности изображения.
В соответствии с дополнительным аспектом этап d) определения пространственного отношения 130 содержит локализацию элемента.
Например, пространственное отношение 130 основывается на регистрации элемента.
В соответствии с дополнительным аспектом пространственное отношение 130 основано на регистрации ориентиров.
Например, пространственное отношение может быть также получено, используя одно и то же средство получения изображения для захвата пространственных геометрических данных 116 и данных 122 живого изображения.
В соответствии с дополнительным аспектом этап d) содержит коррекцию отклонения границ, например компенсацию дыхания или биения сердца.
В соответствии с дополнительным аспектом в случае когда пространственные геометрические данные 116 также содержат временную информацию, для определения пространственного отношения определяется временное пространственное отношение, хотя это дополнительно не показано.
В отношении этапа е), в соответствии с дополнительным аспектом заранее заданное отношение может быть заранее установлено пользователем.
В соответствии с дополнительным аспектом заранее заданное отношение содержит, по меньшей мере, один параметр.
В соответствии с примерным вариантом осуществления изобретения заранее заданная соответствующая точка местоположения является ближайшей точкой.
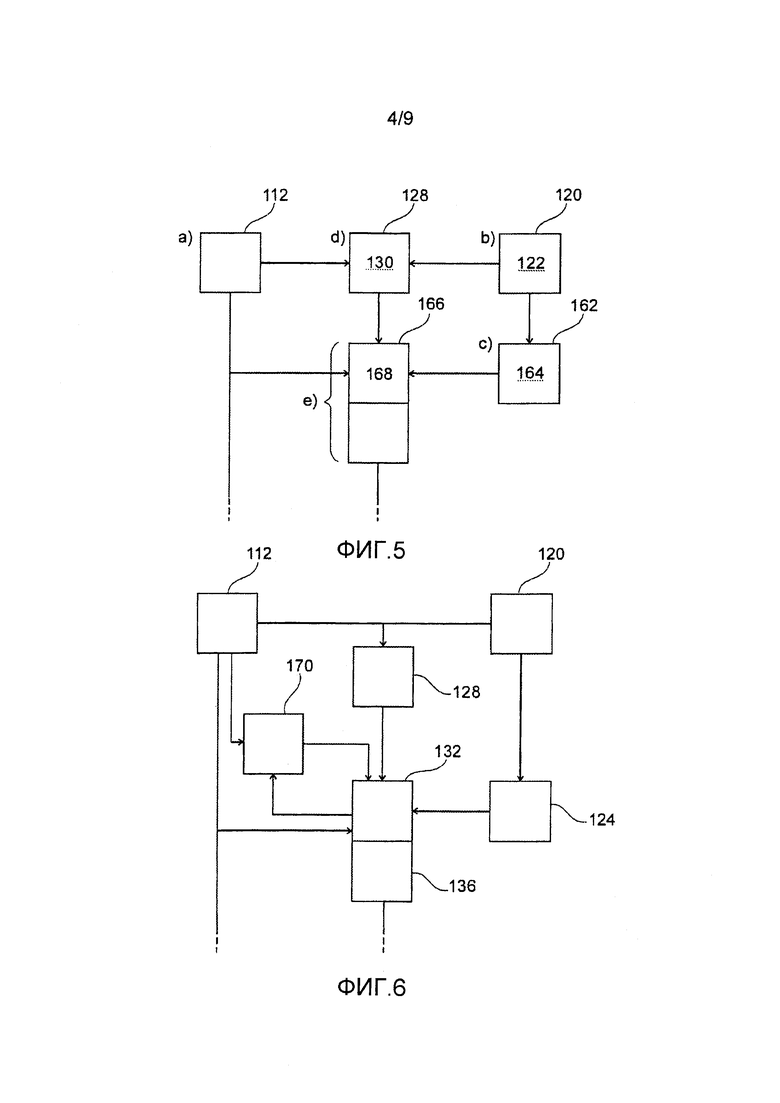
В соответствии с дополнительным примерным вариантом осуществления, показанным на Фиг.5, обнаружение элемента на этапе с) содержит определение 162 2D положения 164 элемента в данных живого изображения и для определения положения на этапе е), обнаруженное 2D положение преобразовывается 166 в пространственных геометрических данных посредством прямой линии проецирования 168.
В соответствии с дополнительным аспектом для определения положения, пространственные параметры обеспечивают с помощью средства захвата. Например, пространственные параметры обеспечивают с помощью электромагнитной локализации или одним или двумя 2D изображениями с разных плоскостей наблюдения.
В соответствии с дополнительным аспектом этап е) содержит коррекцию отклонения границ, например, компенсацию дыхания или биения сердца.
В соответствии с дополнительным примерным вариантом осуществления, показанным на Фиг.6, этап е) содержит обратное проецирование 170 отслеживаемого местоположения сквозь пространственные геометрические данные, чтобы оценить пространственное положение 172 элемента.
В соответствии с примерным аспектом это может быть выполнено в виде петли, указанной двумя стрелками 174a и 174b, входящими и выходящими из прямоугольника 170 обратного проецирования.
В соответствии с примерным вариантом осуществления изобретения в случае когда обратное проецирование не пересекается с анатомической структурой, согласно пространственным геометрическим данным 116, используется ближайшая или статистически наиболее похожая точка в анатомической структуре (не показано).
В соответствии с дополнительным примерным вариантом осуществления упрощенное представление поверхности представляет собой развернутое изображение карты (примеры расширенного изображения карты описаны дополнительно ниже).
В соответствии с дополнительным аспектом визуализация функциональных параметров также рассматривается как функциональные данные изображения.
В соответствии с дополнительным аспектом для генерирования комбинации представление 3D изображения пространственных геометрических данных 116 и определенное 3D положение преобразуются в плоское представление (смотри ниже).
В соответствии с дополнительным аспектом представление содержит 2D карту с цветной кодированной информацией в качестве еще одной размерности, кроме двух геометрических размерностей.
В соответствии с дополнительным примерным вариантом осуществления изобретения представлена ось проецирования от обнаруженного элемента в пространственных геометрических данных до вычисленной соответствующей точки местоположения на поверхности функциональных параметров. Дополнительно, упрощенное представление поверхности в 3D изображении и 3D изображении выравнивается по оси проецирования.
В соответствии с дополнительным аспектом этап f) содержит вычисление положения маркера на развернутом представлении, на основе определенного положения этапа е).
В соответствии с дополнительным аспектом представление поверхности также рассматривается как параметрическая поверхность.
В соответствии с дополнительным аспектом развернутая 2D карта кодирует информацию поверхности 118 функциональных параметров, например функциональную сетку.
В соответствии с дополнительным аспектом этап f) содержит генерирование сегментированной сетки.
В соответствии с дополнительным примерным вариантом осуществления изобретения развернутая карта, как указано выше, представляет собой вид «бычий глаз» (смотри дополнительно ниже, в качестве примера такого вида «бычий глаз»).
В соответствии с дополнительным аспектом упрощенное представление поверхности содержит 2D карту поверхности, например левого предсердия, в случае сердечно-сосудистых вмешательств.
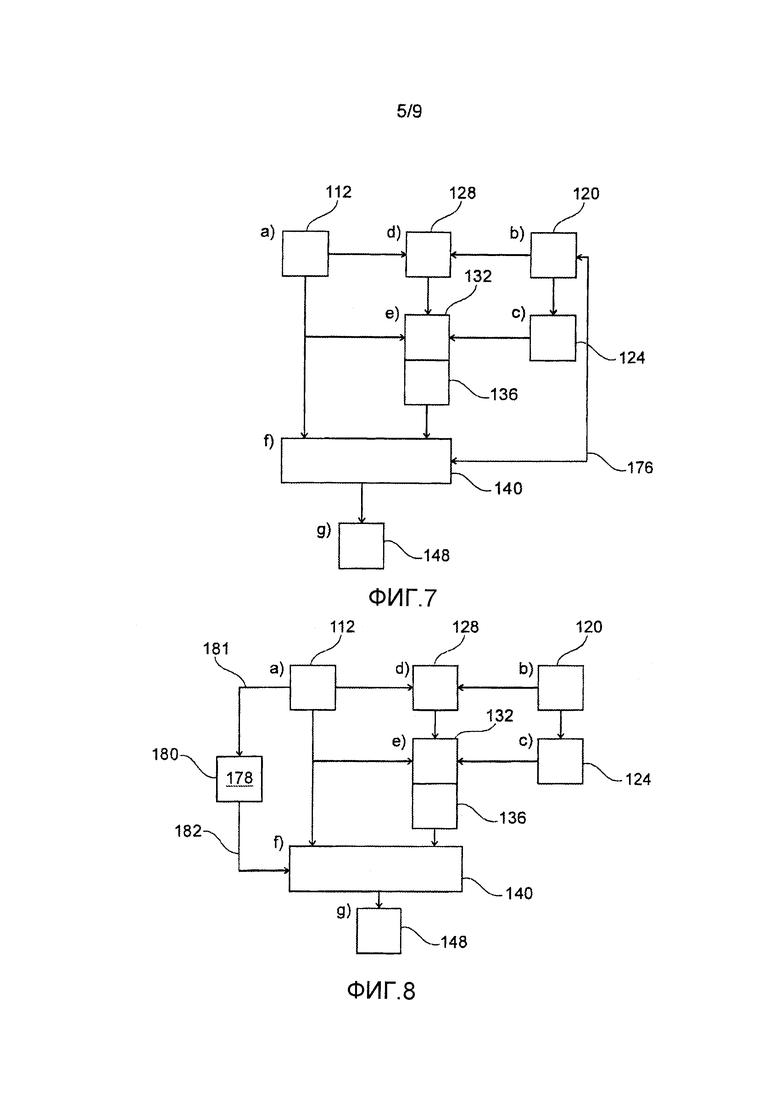
В соответствии с дополнительным примерным вариантом осуществления изобретения этап f) содержит комбинацию навигационной анатомической структуры с упрощенным представлением 144 поверхности. Например, как показано на Фиг.7, этап f) содержит комбинирование данных 122 живого изображения, обеспеченных на этапе b) в качестве навигационной анатомической структуры. На Фиг.7 это показано стрелкой 176 от прямоугольника 120 захвата до прямоугольника 140 генерирования. Например, навигационная анатомическая структура содержит данные живого изображения в виде флюороскопического 2D изображения.
В соответствии с дополнительным примерным вариантом осуществления навигационная анатомическая структура содержит проекцию 178 сосудистой структуры.
В соответствии с одним аспектом, показанным на Фиг.8, проекция 178 выводится с помощью сегментирования или моделирования 180 пространственных геометрических данных 116, полученных на этапе е), который указан стрелкой 181 от прямоугольника этапа 112 предоставления до этапа 180 сегментирования или моделирования. Проекция 178, созданная таким образом, или соответственно вычисленная, затем вводится в прямоугольник 140 генерирования, который указан стрелкой 182, вводящей в прямоугольник этапа f).
В соответствии с примерным вариантом осуществления изобретения навигационное указание 150 представляет собой 2D представление, содержащее информацию о поверхности функциональных параметров и информацию о 3D позиционировании элемента по отношению к области исследования. В качестве примера 2D представления, см. ниже.
В соответствии с одним аспектом изобретения, навигационное указание также представляет временную информацию в случае, когда предварительные навигационные данные содержат данные 3D+t изображения.
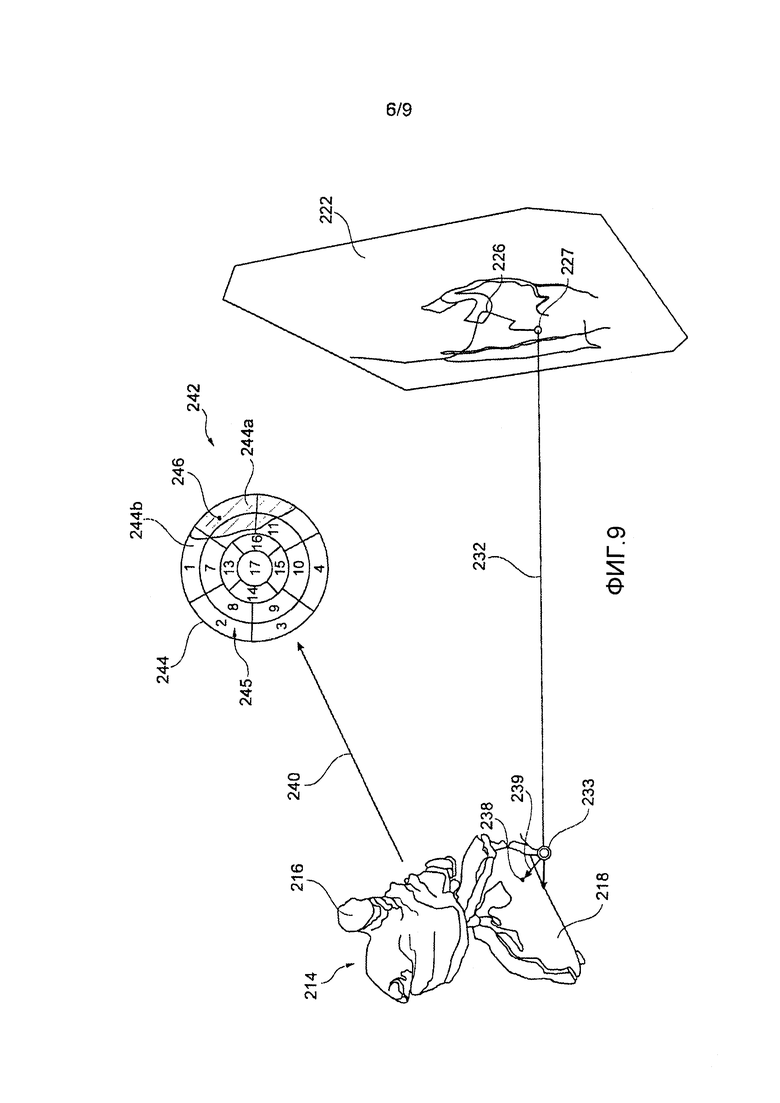
В последующем, примерный вариант осуществления изобретения описан со ссылкой на Фиг.9. В левой части изображения представлены предварительные навигационные данные 214 области исследования объекта. Предварительные навигационные данные содержат пространственные геометрические данные 216, или, другими словами, предварительные навигационные данные 214 содержат данные трехмерного изображения области исследования. Например, геометрические данные 216, показанные на Фиг.9, представляют трехмерную анатомическую информацию, например при сердечно-сосудистом вмешательстве. Предварительные навигационные данные 214 также содержат поверхность 218 функциональных параметров, в соответствии с пространственными геометрическими данными 216. В качестве примерного варианта осуществления, показанного на Фиг.9, поверхность 218 функциональных параметров содержит функциональную сетку. Как можно видеть, функциональная сетка отслеживает контур, т.е. трехмерную форму анатомической структуры, и предоставляет дополнительную информацию о функциональных параметрах, как упоминалось выше. Эти функциональные параметры предоставлены, например, цветным кодированием. Например, целевая область показана зеленым, в то время как другие поверхности показаны красным цветом. Конечно, этого можно также достигнуть разными моделями.
В правой части Фиг.9, представлены перспектива или слегка искаженные данные 222 живого изображения области исследования, например в форме 2D флюороскопического изображения. В флюороскопическом изображении 222 элемент 226 видим и может, таким образом, быть обнаружен. Например, элемент 226 представляет собой направляющий провод или наконечник 227 проводника, указанный, например, красной точкой. Как указано кодированной линией 225, элемент 226 уже был обнаружен на Фиг.9.
Дополнительно, пространственное отношение предварительных навигационных данных 214 и данных 222 живого изображения также уже определены. Наконечник 227 затем принимается за положение 224 элемента 226 так, что положение 224 обнаруженного элемента может быть определено в пространственных геометрических данных 216. Поскольку пространственное отношение двух типов данных известно, определение достигается линейным проецированием в рентгеновской геометрии, которое указано прямой стрелкой 232 от положения 224 наконечника в направлении пространственных геометрических данных 216. Как указано точкой 233, положение направляющего провода в 3D достигается проекционным преобразованием в сетку ограничивающей анатомической структуры, которая является представлением пространственных геометрических данных 216. Таким образом, положение обнаруженного элемента определяется в пространственных геометрических данных.
Дополнительно, на этапе вычисления, вычисляется заранее заданная соответствующая точка местоположения на поверхности функциональных параметров. В соответствии с показанным примером, заранее заданная соответствующая точка местоположения может быть ближайшей точкой 238 на функциональной сетке по отношению к обнаруженному положению проводника, указанному точкой 233. Вычисление обозначается стрелкой 239.
Чтобы было возможно обеспечить пользователю легкое восприятие информации, генерируется упрощенное представление 244 поверхности области исследования. В соответствии с показанным примером, упрощенное представление поверхности представляет собой так называемое представление «бычий глаз», которое также указывается как пятно «бычий глаз». Такое представление в виде «бычьего глаза» показывает объемную информацию области исследования в двухмерном виде, т.е. плоскую развернутую карту. Отдельные объемные части, заключенные в объем в пространственных геометрических данных 216, разделяются на несколько сегментов 245, как указано на пятне «бычий глаз» в середине Фиг.9. Части поверхности из пространственных геометрических данных 216 численно кодируются. Дополнительно, возможно передавать вычисленное положение на развернутую проекцию карты с помощью прямого преобразования. Как было видно на упрощенном представлении 244 поверхности сегменты, указанные числами, также перекрываются кодированными образцами или цветами. Например, заданная область указывается определенным заранее заданным образцом 244а, тогда как оставшаяся кодируется другим заранее заданным кодированным образцом 244b. Ближайшая точка, вычисленная ранее на этапе определения, указывается маркером 246. Прямое преобразование указывается стрелкой 240. Таким образом, генерируется комбинация 242, которая затем может быть отображена в качестве навигационного указания.
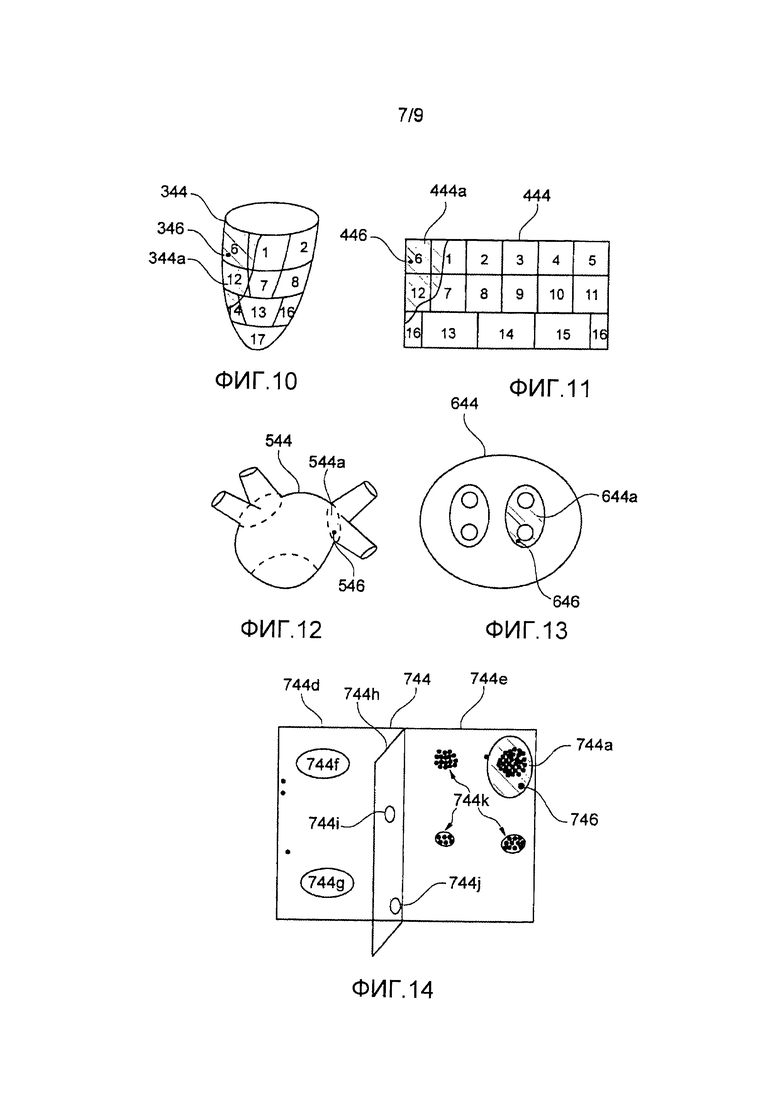
В соответствии с дополнительным аспектом изобретения вместо развернутой карты, например вида «бычий глаз», также возможно генерировать трехмерную фигуру левого желудочка, как показано на Фиг.10 для упрощенного представления поверхности. В соответствии с номерами ссылок, используемыми в отношении вида «бычий глаз», Фиг.10 показывает комбинацию 342 упрощенного представления 344 поверхности с маркером 36, указывающим вычисленную заранее заданную соответствующую точку местоположения. Дополнительно, также возможно указывать целевую область с кодированным образцом 344а.
В другом примере, показанном на Фиг.11, левое предсердие, показано в развернутом виде как упрощенное представление 444 поверхности с маркером 446, указывающим вычисленную заранее заданную соответствующую точку местоположения, и также заданную область, указанную кодированным образцом 444а.
В соответствии с другим примером упрощенный перспективный вид левого предсердия показан на Фиг.12. Таким образом, левое предсердие представляет упрощенное представление 544 поверхности с маркером 546 и целевой областью 544а.
Левое предсердие с Фиг.12 может также быть отображено на развернутой карте, показанной на Фиг.13. Развернутая карта представляет собой упрощенное представление 644 поверхности с маркером 646 и целевой областью 644а.
В соответствии с дополнительным примером, показанным на Фиг.14, в качестве упрощенного представления 744 поверхности, оба правое и левое предсердия показаны в развернутом виде. Также здесь, маркер 746 обозначен наряду с целевой областью 744а. Фиг.14 показывает развернутую карту левого 744d и правого 744е предсердий с дополнительной анатомической информацией, например верхней полой веной 744f, внутренней полой веной 744е, перегородкой 744h, овальной ямкой 744i, венечным синусом 744j и легочными венами 744k.
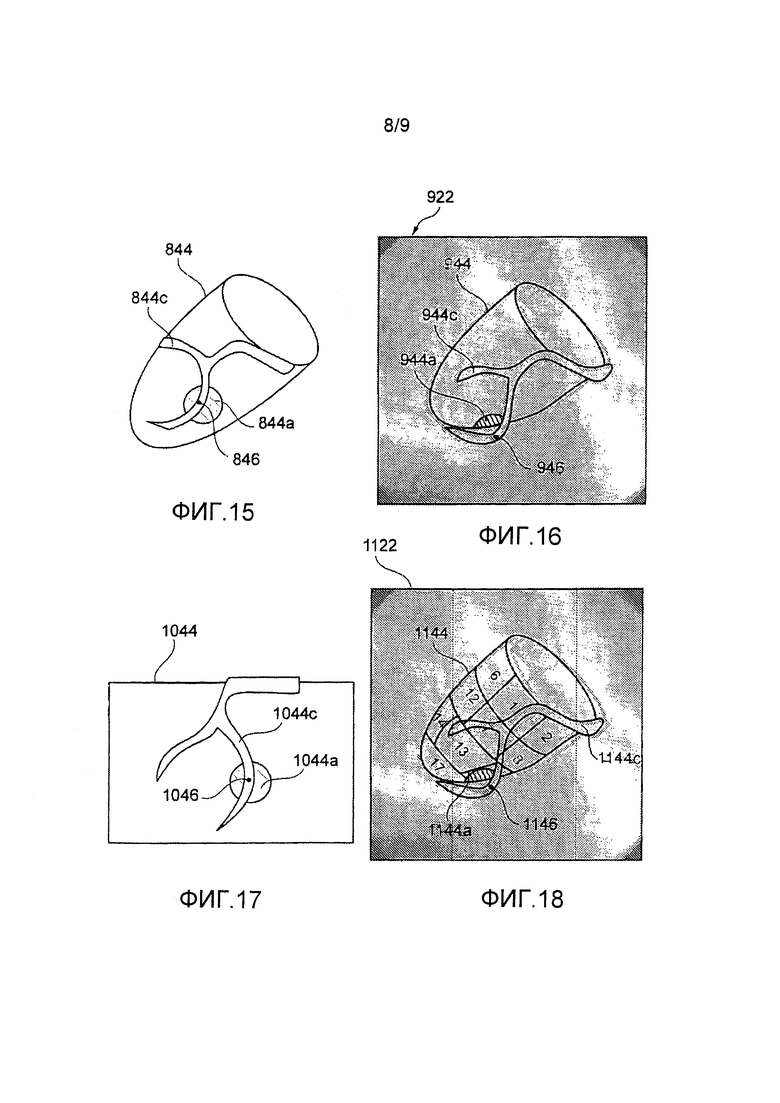
Фиг.15 показывает дополнительный пример упрощенного представления 844 поверхности в форме перспективной проволочной рамки левого желудочка, например. Как можно видеть, маркер 846 указывается наряду с целевой областью 844а. Дополнительно проволочная рамка, указываемая отсылочным номером 844с, дополняется анатомической информацией, например, с помощью представления 844b сосудистой структуры.
Фиг.15 также показывает другой аспект изобретения: в соответствии с дополнительным примерным вариантом осуществления изобретения ось проекции предусмотрена от обнаруженного элемента в пространственных геометрических данных до вычисленной соответствующей точки местоположения на поверхности функциональных параметров. Например, эта ось проекции используется для определения ближайшей точки. Дополнительно, упрощенное представление поверхности на Фиг.15 является 3D изображением. Как можно видеть это 3D изображение выравнивается по оси проекции. Другими словами, 3D изображение автоматически ориентируется так, что ось визуализации выравнивается в направлении проецирования, например катетер/направляющий провод/проводник к заданной поверхности. При такой ориентации катетер/направляющий провод/проводник всегда виден и накладывается на свою проекцию поверхности без ошибки параллакса. По этой причине становится очень легко проверить, что катетер/направляющий провод/проводник достиг заданного местоположения по отношению к поверхности.
Фиг.16 показывает похожее упрощенное представление 944 поверхности с маркером 946, образец, указывающий целевую область 944а наряду с анатомической информацией с помощью представления 944с сосудов. В дополнение, комбинация упрощенного представления 944 поверхности и маркера 946 перекрывается живым изображением, например флюороскопическим изображением 922, которое используется как данные 122 живого изображения, в соответствии с вышеописанными вариантами осуществления.
В соответствии с дополнительным примером упрощенное представление 844 поверхности на Фиг.15 может также быть отображено в развернутом виде, показанном на Фиг.17. Упрощенное представление 1044 поверхности комбинируется с маркером 1046, указывающим вычисленную заранее заданную соответствующую точку местоположения. Дополнительно, также возможно указывать целевую область кодированным образцом 1044а. В соответствии с Фиг.15, анатомическая структура, например сосудистое дерево 1044с, также показано.
В соответствии с дополнительным аспектом, показанным на Фиг.18, флюорографическое изображение 1122 комбинируется с перспективным видом левого желудочка, например, в соответствии с Фиг.10. Таким образом, упрощенное представление 1144 поверхности в форме левого желудочка комбинируется с маркером 1146. В дополнение также возможно указывать целевую область с кодированным образцом 1144а. Дополнительно, как обозначено ссылочным номером 1144с, сосудистое дерево также обозначается.
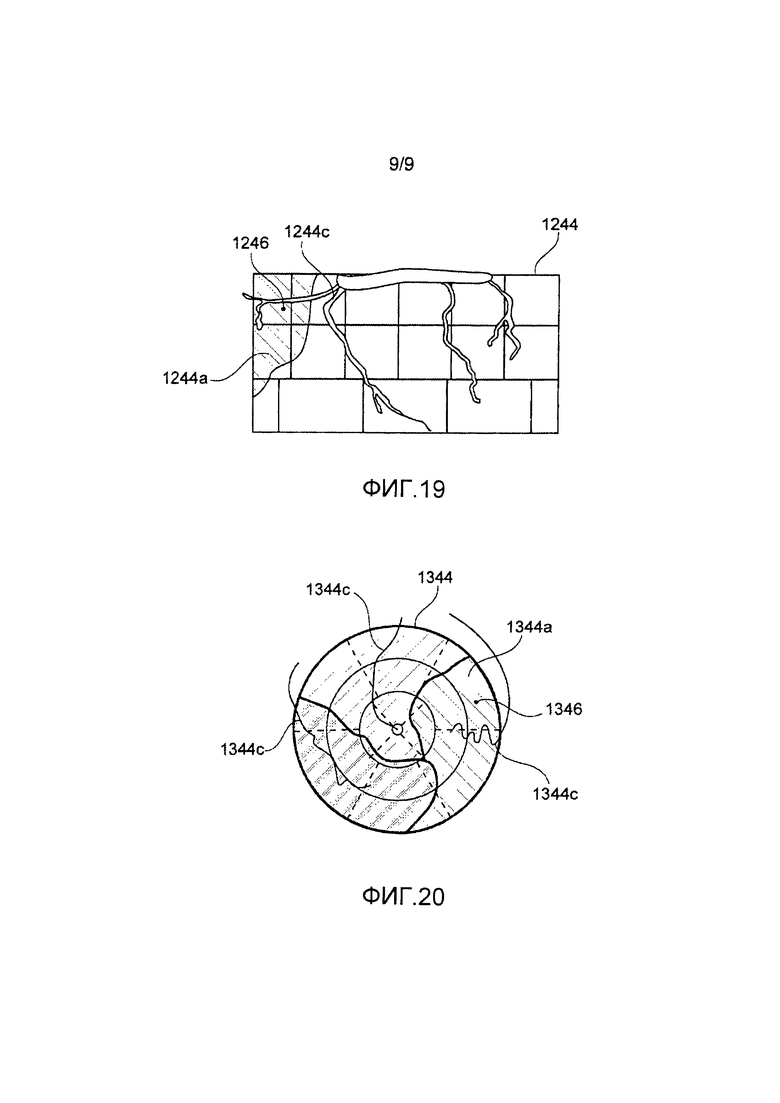
В соответствии с дополнительным примерным вариантом осуществления, показанным на Фиг.19, развернутая карта 1244 комбинируется с маркером 1246 так же, как и кодированный образец, представляющий целевую область 1244а. Дополнительно, представление 1244с сосудистого дерева перекрывается с этой комбинацией.
В соответствии с дополнительным примером, показанным на Фиг.20, вид 1344 «бычий глаз» представляет упрощенное представление поверхности, которое комбинируется с маркером 1346 так же, как и целевой областью 1344а. Дополнительно, анатомическая информация накладывается в виде проекции сосудистого дерева или имитации 1344с.
В соответствии с одним аспектом изобретения, например в отношении способов расширенной навигации для процедур сердечно-сосудистого вмешательства, представлена визуализация местоположения катетеров/направляющих проводов/проводников по отношению к целевым зонам для абляции или развертывания провода кардиостимулятора. Было показано, что наложение и регистрация 3D предоперационной поверхности на 2D рентгеновскую проекцию требует повторной переориентации плоскости рентгеновского изображения, чтобы дать возможность полного понимания действительного местоположения запроса, главным образом из-за скрытых частей и/или ошибок параллакса. Настоящее изобретение по этой причине обеспечивает более точную информацию, например о положении катетера в 3D пространстве, для хирурга. В качестве преимущества, нагрузка перемещения катетера/направляющего провода/проводника в 3D по направлению к запрашиваемой цели минимальна.
В соответствии с одним аспектом настоящее изобретение осуществлено в программном обеспечении указания для вмешательства, что может помочь легче идентифицировать и достигать целей поиска. Уменьшение переориентации рентгеновских систем требуется, чтобы получить удовлетворительную информацию по 3D местоположению катетера/направляющего провода/проводника по отношению к целевым зонам.
В соответствии с одним аспектом изображение, представляющее 2D проекцию 3D области, создается и отображается в реальном времени совместно с вычисленным положением, например, наконечника катетера.
В соответствии с одним аспектом используются альтернативно другие известные методики проецирования, такие как те, которые обычно использованы для получения планисфер. Таким образом, навигация имеет место в таком 2D развернутом изображении карты.
Как преимущество, этот подход упрощает навигацию в сложной 3D анатомической структуре и помогает очень эффективно достичь терапевтических целей.
В примерном варианте осуществления, где используются 3D изображения, способ может содержать следующие этапы: обеспечение зарегистрированного 3D изображения области исследования; обеспечение рентгеновского флюороскопического 2D изображения в реальном времени, которое регистрируется для навигационной анатомической структуры (это изображение может показать инвазивный инструмент); определение/отслеживание положения в реальном времени; могут быть различные пути для выполнения этого, например, с помощью анализа флюороскопического изображения; вычисление маркерного положения инструмента в развернутом представлении на основании положения, определенного на предыдущем этапе; и отображение изображения, показывающего развернутое представление, включающее в себя маркер в вычисленном положении.
Например, получена 2D интраоперативная рентгеновская проекция введенного инструмента (например, наконечника катетера). Дополнительно, получают предварительный или интраоперационный захват 3D анатомической структуры, где введенный инструмент ограничен в перемещении, например в коронарных венах. В соответствии с другим аспектом это может быть заменено другим способом локализации катетера в 3D, например электромагнитной локализацией или двумя рентгеновскими проекциями под разными углами. Также, дополнительно, получают представление поверхности области введения, например левого желудочка, на котором может быть отображена дополнительная информация, например местоположение рубца или бляшки, механическая функция, электрическая активация и т.д. Эта поверхность может также быть отображена в развернутых представлениях, например в виде «бычьего глаза».
В соответствии с одним аспектом представлена регистрация 3D анатомической структуры, где катетер/направляющий провод/проводник перемещается, и поверхности, где определяется заданная область. Навигационная анатомическая структура и параметрическая поверхность регистрируются вместе. Если используется одна и та же техника получения изображения, чтобы получить эти два элемента (например, MRI для эндокарда левого желудочка и коронарных вен), то подразумевается регистрация. В другом случае (например, СТА для коронарных вен и эхографии для функции левого желудочка) нужен особый способ регистрации, который должен быть применен (например, жесткое преобразование, оцененное по общим ориентирам). Альтернативно, регистрация навигационной анатомической структуры и параметрической поверхности может быть получена регистрированием их обоих независимо для 2D рентгеновской проекции, как описано выше.
В соответствии с другим аспектом представлена регистрация объектов анатомической структуры, как описано выше, с получением живого изображения, используемая в процессе вмешательства (например, 2D рентгеновская проекция или «флюоро»). Навигационная анатомическая структура и поверхность, где определяется целевая область, регистрируются отдельно или совместно, для 2D рентгеновской проекции. Например, может быть использована точка на основании подхода регистрации 2D3D перспективы. После захвата рентгеновской ангиограммы коронарных вен определяют, по меньшей мере, 3 маркерных точки на 2D проекции на особых анатомических местоположениях таких, как раздвоение вены, CS, крутых изгибах в сосудах и т.д. Местоположение одних и тех же анатомических точек определяют в сегментированном 3D коронарном венозном дереве, например, и из сердечной MR. 2D-3D регистрация выполняется с использованием, например метода регистрации с 6-тью степенями свободы (6DOF, перемещение и вращение), используя оптимизацию. Отсюда, квадрат расстояния между точками в 2D рентгеновской проекции и проецируемыми 3D CMR точками нужно минимизировать (методом наименьших квадратов расстояний проецируемых точек): minT = 


В соответствии с другим аспектом представлено обнаружение или отслеживание катетера/направляющего провода/проводника в живых изображениях, используемых в процессе вмешательства. Это может содержать обнаружение или отслеживание наконечника катетера (или направляющего провода или наконечника проводника) в реальном времени внутри 2D рентгеновской проекции. С этой целью может быть использован подходящий корреляционный фильтр подходящего образца. В особом случае CRT, направляющий провод/проводник кардиостимулятора может быть отслежен внутри системы коронарных вен.
В соответствии с другим аспектом представлена 3D локализация катетера/направляющего провода/проводника. Она может содержать обратную проекцию отслеживаемого местоположения по навигационной анатомической структуре, когда наконечник катетера ограничен в навигации. Используя обратную проекцию отслеживаемой точки в рентгеновской геометрии, может быть идентифицировано соответствующее 3D местоположение (например, вдоль центральной линии коронарной вены из предоперационного изображения) внутри 3D навигационной анатомической структуры. Для CRT таким путем может быть определено особое местоположение в 3D направляющего провода/проводника внутри системы коронарных вен. Если линия обратной проекции не пересекает навигационную анатомическую структуру, например из-за 2D3D пропущенной регистрации или движения, то может быть использована ближайшая (или статистически наиболее близкая) точка в ограничивающей анатомической структуре. Деформации из-за дыхания и движения сердца могут быть учтены с помощью образца, основанного на отслеживании движения дыхания, ECG стробирования или других методов компенсации движения.
В соответствии с дополнительным аспектом используется другой способ для 3D местоположения наконечника катетера, например, электромагнитная локализация (ЕМ локализация) или 2 рентгеновские проекции под разными углами. В этом случае нет необходимости в ограничивающей навигационной анатомической структуре, и это изобретение может быть применено к навигации в больших анатомических областях, таких как сердечные камеры (левое предсердие для AF абляции или левый желудочек для VT абляции).
В соответствии с другим аспектом представлена проекция катетера/направляющего провода/проводника на поверхности, где определяется целевая область. Это может содержать вычисление ближайшей точки определяемого 3D местоположения к заданному местоположению на 3D параметрической поверхности. В особом случае CRT ближайшая точка на поверхности левого желудочка (LV) (предполагая, что она представлена дискретной сеткой) определяется из текущего положения внутри коронарной венозной системы с помощью: mint


В соответствии с другим аспектом представлено отображение катетера/направляющего провода/проводника и целевой области на упрощенном виде (развернутом 2D виде или автоматически ориентированном 3D). Желательно, чтобы навигационная анатомическая структура, т.е. коронарные вены, также отображались на этом же самом виде.
Как только определены оба местоположения - наконечника 

Для особого случая CRT, ближайшая точка на LV в отношении к отслеживаемому направляющему проводу/проводнику в системе коронарных вен отображается в виде уже упоминавшегося пятна типа «бычий глаз». Согласно Американской Ассоциации Сердца, LV может быть разделен на 17 сегментов, 6 базальных, 6 экваториальных и 5 верхушечных сегментов. Функциональный Ультразвук или MR позволяют визуализировать важную функциональную информацию в таких диаграммах типа «бычий глаз». Таким образом, текущее местоположение направляющего провода/проводника может быть визуализировано в реальном времени по отношению к заданным пятнам в «бычьем глазу». Для CRT, «бычий глаз» должен частично содержать информацию, такую как механическое возбуждение, бляшки рубцов и электрическое возбуждение.
В соответствии с другим аспектом изобретения может быть использовано для CRT или любой другой процедуры вмешательства, запрашивающей положение катетера/проводника/направляющего провода по отношению к анатомической структуре и особым параметрам, т.е. функции, рубцовая нагрузка, электрическому возбуждению и т.д. (например абляция венозного тромбоза (VT) при васкулярной тахикардии, введении стволовых клеток и т.д.). Применительно к VT абляции, «бычий глаз» может содержать информацию такую, как рубцовая нагрузка и электрическое возбуждение. Применительно к абляции фибрилляции предсердия, 2D карта поверхности левого предсердия может быть использована вместо LV «бычьего глаза», указывая устье легочных вен.
В другом примерном варианте осуществления настоящего изобретения (не показано) представлена компьютерная программа или элемент компьютерной программы, например, характеризуемый тем, что выполнен с возможностью исполнения этапов способа в соответствии с одним из предыдущих вариантов осуществления, на подходящей системе.
Элемент компьютерной программы, таким образом, должен храниться в компьютерном блоке, который также может быть частью варианта осуществления настоящего изобретения. Этот компьютерной блок может быть выполнен с возможностью исполнять или инициировать исполнение этапов способа, описанных выше. Более того, от может быть выполнен с возможностью управлять компонентами вышеописанных устройств. Компьютерный блок может быть выполнен с возможностью автоматической работы и/или выполнения команд пользователя. Компьютерная программа может быть загружена в рабочую память процессора данных. Процессор данных может, таким образом, быть оборудован для выполнения способа изобретения.
Этот примерный вариант осуществления изобретения охватывает обе: компьютерную программу, которая с самого начала используется в изобретении, и компьютерную программу, которая посредством обновления преобразует существующую программу в программу, которую используется в изобретении.
Дополнительно, элемент компьютерной программы может быть способен обеспечить все необходимые этапы, чтобы полностью выполнить примерный вариант осуществления способа, как описано выше.
В соответствии с другим примерным осуществлением настоящего изобретения (не показано) представлен машиночитаемый носитель, такой как CD-ROM, где машиночитаемый носитель содержит элемент компьютерной программы, хранимый в нем, причем элемент компьютерной программы описан в предыдущем разделе.
Компьютерная программа может быть сохранена и/или распределена на подходящем носителе таком, как оптическое запоминающее устройство или твердотельное устройство, поставляемое совместно с или как часть другого аппаратного обеспечения, но может также быть распространено в других формах, таких как через Интернет или другие проводные или беспроводные телекоммуникационные системы.
Однако в соответствии с другим аспектом компьютерная программа может быть также представлена по сети, такой как World Wide Web и может быть загружена в рабочую память процессора данных из такой сети. В соответствии с дополнительным примерным вариантом осуществления настоящего изобретения представлен носитель для получения элемента компьютерной программы, подходящего для загрузки, причем элемент компьютерной программы предназначен для выполнения способа в соответствии с одним из ранее описанных вариантов осуществления изобретения.
Следует отметить, что варианты осуществления изобретения описаны со ссылкой на разные объекты. В частности, некоторые варианты осуществления описаны со ссылкой на пункты формулы, описывающие способ, в то время как другие варианты осуществления описаны со ссылкой на пункты формулы, описывающие устройство. Однако специалист в данной области техники заключит из вышеописанного и последующего описания, что если не указано обратное, в дополнение к любой комбинации признаков, относящихся к одному типу объекта, допускается также любая комбинация признаков, относящихся к разным типам объектов, которые должны быть раскрыты в этой заявке.
Однако все признаки могут быть объединены, обеспечивая взаимно усиливающиеся эффекты, которые являются более чем простым суммированием признаков.
В патентной формуле слово «содержащий» не исключает других элементов или этапов, а единственное число не исключает множественности. Единственный процессор или другое устройство может полностью выполнить функции нескольких устройств, перечисленных в формуле. Простой факт, что некоторые средства совместно перечисляются в разных зависимых пунктах формулы, не означает, что комбинация этих средств не может быть использована для получения преимуществ.
Группа изобретений относится к визуализации информации об объекте. Способ содержит этапы, на которых обеспечивают предварительные навигационные данные области исследования объекта, причем предварительные навигационные данные содержат пространственные геометрические данные и поверхность функциональных параметров, получают данные живого изображения области исследования, обнаруживают инструмент в данных живого изображения, определяют пространственное отношение предварительных навигационных данных и данных живого изображения, определяют положение обнаруженного инструмента в пространственных геометрических данных и вычисляют заранее заданную соответствующую точку местоположения на поверхности функциональных параметров, генерируют комбинацию упрощенного представления поверхности области исследования, при этом упрощенное представление поверхности основано на визуализации поверхности функциональных параметров, и маркера, указывающего вычисленную заранее заданную соответствующую точку местоположения инструмента. Упрощенное представление поверхности представляет собой изображение развернутой карты, после чего отображают комбинацию как навигационное указание. Устройство содержит блоки обработки, интерфейса и дисплей. Медицинская система изображения содержит устройство и средство захвата изображения для захвата данных живого изображения области исследования. Машиночитаемый носитель содержит сохраненные на нем элементы компьютерной программы. Использование изобретений позволяет расширить пространственную информацию о положении объекта. 4 н. и 9 з.п. ф-лы, 20 ил. 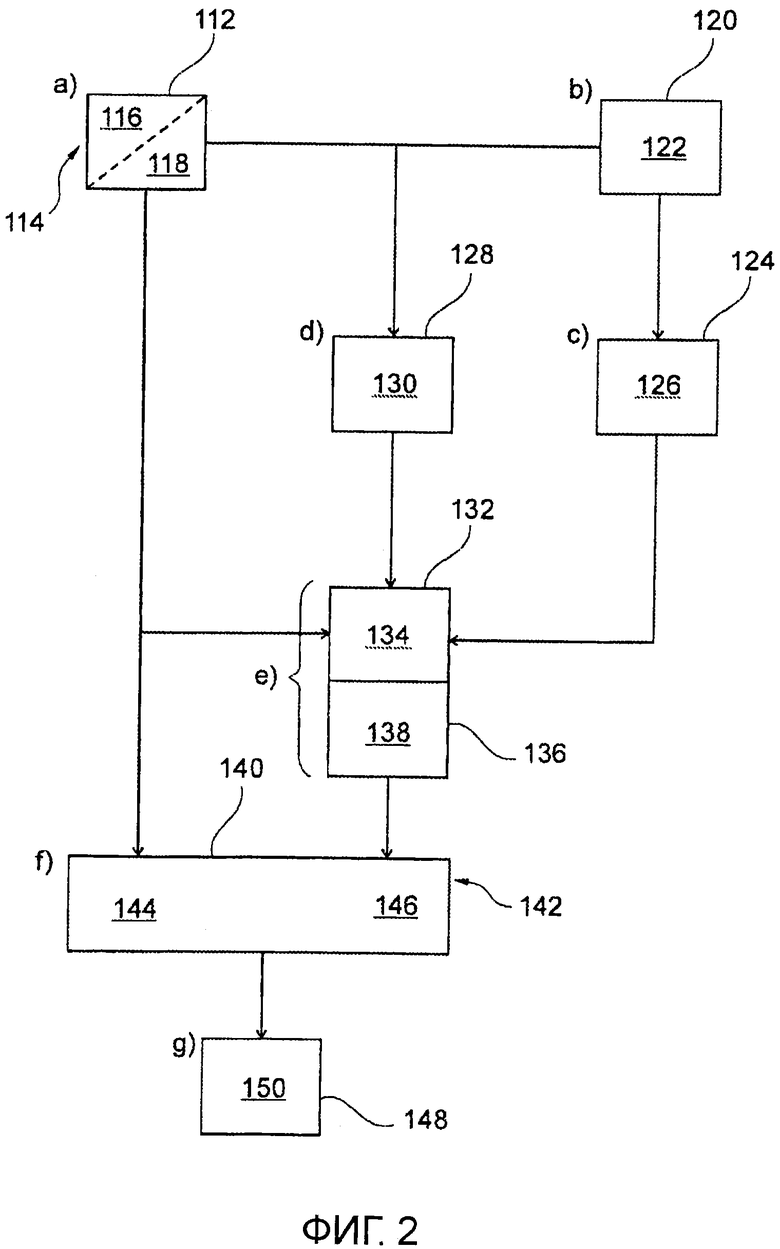
1. Способ (110) визуализации информации об объекте исследования, при этом способ содержит этапы, на которых:
a) обеспечивают (112) предварительные навигационные данные (114) области исследования объекта (22); причем предварительные навигационные данные содержат пространственные геометрические данные (116) и поверхность (118) функциональных параметров, в соответствии с пространственными геометрическими данными;
b) получают (120) данные (122) живого изображения области исследования;
c) обнаруживают (124) инструмент (126) в данных живого изображения;
d) определяют (128) пространственное отношение (130) предварительных навигационных данных и данных живого изображения;
e) определяют (132) положение (134) обнаруженного инструмента в пространственных геометрических данных, причем определение основано на пространственном отношении, и вычисляют (136) заранее заданную соответствующую точку местоположения (138) на поверхности функциональных параметров;
f) генерируют (140) комбинацию (142) упрощенного представления (144) поверхности области исследования, при этом упрощенное представление поверхности основано на визуализации поверхности функциональных параметров, и маркера (146), указывающего вычисленную заранее заданную соответствующую точку местоположения инструмента; причем упрощенное представление поверхности представляет собой изображение развернутой карты; и
g) отображают (148) комбинацию как навигационное указание (150).
2. Способ по п. 1, в котором развернутая карта представляет собой мишень.
3. Способ по п. 1, в котором заранее заданная соответствующая точка местоположения является ближайшей точкой на поверхности функциональных параметров.
4. Способ по п. 1, в котором обнаружение инструмента содержит определение (162) 2D положения (164) инструмента в данных живого изображения и для определения положения на этапе е) обнаруженное 2D положение преобразовывается (166) в пространственные геометрические данные с помощью прямой проекционной линии (168).
5. Способ по п. 1, в котором этап е) содержит обратное проецирование (170) определенного положения через пространственные геометрические данные, чтобы оценить (172) пространственное положение инструмента.
6. Способ по п. 5, в котором в случае, когда обратное проецирование не пересекается с анатомической структурой, в соответствии с пространственными геометрическими данными, используется ближайшая точка или статистически наиболее близкая точка в анатомической структуре.
7. Способ по п. 1, в котором обеспечивают ось проецирования от обнаруженного инструмента в пространственных геометрических данных до вычисленной соответствующей точки местоположения (138) на поверхности функциональных параметров; причем упрощенное представление поверхности представляет собой 3D изображение; и причем 3D изображение выровнено по оси проецирования.
8. Способ по п. 1, в котором этап f) содержит комбинирование навигационной анатомической структуры с упрощенным представлением поверхности.
9. Способ по п. 1, в котором навигационная анатомическая структура содержит проекцию сосудистой структуры.
10. Способ по п. 1, в котором навигационное указание представляет собой 2D представление, содержащее поверхность функциональных параметров и информацию о 3D позиционировании инструмента по отношению к области исследования.
11. Устройство (24) для визуализации информации об объекте исследования, содержащее
- блок (26) обработки;
- блок (28) интерфейса; и
- дисплей (30);
причем блок (28) интерфейса предназначен для обеспечения предварительных навигационных данных области исследования объекта, причем предварительные навигационные данные содержат пространственные геометрические данные и поверхность функциональных параметров, в соответствии с пространственными геометрическими данными; и для обеспечения данных живого изображения области исследования;
причем блок (26) обработки предназначен для обнаружения инструмента в данных живого изображения; для определения пространственного отношения предварительных навигационных данных и данных живого изображения; для определения положения обнаруженного инструмента в пространственных геометрических данных, причем это определение основано на пространственном отношении, и для вычисления заранее заданной соответствующей точки местоположения на поверхности функциональных параметров; и для генерирования комбинации упрощенного представления поверхности области исследования, причем это упрощенное представление поверхности основано на визуализации поверхности функциональных параметров, и маркера, указывающего вычисленную заранее заданную соответствующую точку местоположения; причем упрощенное представление поверхности представляет собой изображение развернутой карты; и
причем дисплей (30) предназначен для отображения комбинации как навигационного указания.
12. Медицинская система (10) изображения для визуализации информации об объекте исследования, содержащая:
- устройство (24) по п. 11; и
- средство (12) захвата изображения;
причем средство (12) захвата изображения предназначено для захвата данных живого изображения области исследования.
13. Машиночитаемый носитель, содержащий сохраненные на нем элементы компьютерной программы, которые при выполнении процессорным блоком обеспечивают выполнения этапов способа по любому из пп. 1-10.
| US 2006253029 A1, 09.11.2006 | |||
| US 6650927 B1, 18.11.2003 | |||
| US 2009208079 A1, 20.08.2009 | |||
| Зубная щетка | 1989 |
|
SU1837828A3 |
| СПОСОБ ВЫБОРА ДОСТУПА ДЛЯ ВЫПОЛНЕНИЯ ОПЕРАТИВНОГО ВМЕШАТЕЛЬСТВА | 2007 |
|
RU2353324C2 |

