Изобретение относится к способу и устройству для управления операционным столом, содержащим множество перемещаемых с помощью органов ручного управления секций. Во время операции лежащего на операционном столе пациента его положение многократно изменяется для облегчения хирургического вмешательства. При этом часто требуется придать пациенту положение, которое он прежде уже однажды занимал. Также во время операции может потребоваться повторная смена двух или более положений.
Из DE 19955116 А1 известен блок управления приводами снимаемой с колонны операционного стола панели с перемещаемыми от электродвигателя секциями, состоящий из устройства электропитания, устройства управления и пульта управления. Последний встроен в тележку для транспортировки панели операционного стола.
Из DE 102007062200 А1 известен операционный стол с множеством перемещаемых с помощью элементов управления секций. Состояние и/или изменение состояния, по меньшей мере, части элементов управления регистрируется датчиками, причем формируемые датчиками сигналы подаются к устройству обработки.
Из DE 102005054230 А1 известны способ и устройство для двунаправленной инфракрасной передачи данных между операционным столом и пультом управления. Операционный стол и пульт управления являются соответственно участниками инфракрасной передачи данных и включают в себя соответственно инфракрасный передатчик и инфракрасный приемник.
Из DE 102005054223 А1 известно устройство для изменения положения операционного стола, содержащего колонну, на которой с возможностью снятия расположена перемещаемая панель. Устройство включает в себя пульт управления для подачи команд с целью перемещения секций операционного стола. Команды перемещения могут передаваться с пульта управления непосредственно на перемещаемую панель.
Из DE 102005053754 А1 известно устройство для перемещения панели операционного стола, включающей в себя несколько перемещаемых по отношению друг к другу секций. По меньшей мере, часть перемещаемых секций соединена с исполнительными элементами, которые выполнены с возможностью управления для перемещения соответствующих секций. Устройство ввода содержит средства для ввода относящихся к частям тела команд перемещения, которые ассоциируются с изменением положения части или участка тела лежащего на панели пациента.
Однако при проведении некоторых операций желательно восстановить положение пациента за счет соответствующего перемещения секций операционного стола, которое он уже прежде занимал, в частности тогда, когда это положение было достигнуто относительно сложно с помощью одного или нескольких элементов управления.
Задачей изобретения является создание способа и устройства для управления операционным столом, которые простым образом позволили бы восстановить положение перемещаемых секций операционного стола после его изменения с помощью элементов управления.
Эта задача решается посредством способа управления операционным столом с признаками п. 1 формулы и посредством устройства с признаками независимого пункта формулы на устройство. Предпочтительные варианты осуществления изобретения приведены в зависимых пунктах формулы.
В способе управления операционным столом приведением в действие по меньшей мере одного первого органа ручного управления выполняется первое действие по меньшей мере одного первого приводного блока для перемещения по меньшей мере одной первой секции. Далее приведением в действие второго органа ручного управления выполненное приведением в действие первого органа ручного управления действие автоматически полностью отменяется. За счет этого установленное в результате выполненного действия положение перемещаемых секций операционного стола можно восстановить простым приведением в действие второго органа ручного управления без необходимости сложного повторного установления положения секций оперирующим врачом или его ассистентом. Благодаря этому обеспечивается простое и надежное управление операционным столом. За счет автоматической отмены выполненного при первом действии движения секций предотвращаются также их движения, неблагоприятные для лежащего на панели пациента.
Особенно предпочтительно, если первое действие автоматически полностью отменяется вторым действием, при котором первый приводной блок и/или первая секция автоматически полностью совершает обратный процесс движения по сравнению с выполнением первого действия. В частности, обратный процесс движения гарантирует, что движение секций и вызванное этим движение пациента соответствует его точному обратному движению при первом действии, так что можно не ожидать угрожающего пациенту движения.
Далее предпочтительно, если приведением в действие третьего органа ручного управления выполняется по меньшей мере одно третье действие по меньшей мере одного второго приводного блока для перемещения первой секции и/или по меньшей мере одной второй секции или если приведением в действие второго органа ручного управления автоматически полностью отменяются первое и третье действия. Благодаря этому можно автоматически полностью отменить вызванное приведением в действие первого и третьего органа ручного управления изменение положения пациента простым приведением в действие второго органа ручного управления, так что можно простым образом автоматически полностью отменить также несколько совершенных действий, в результате чего можно простым образом восстановить прежде уже установленное положение секций операционного стола и вызванное этим положение пациента.
При этом первое и третье действия могут выполняться последовательно, причем третье действие выполняется после первого. При одноразовом приведении в действие второго органа ручного управления автоматически полностью отменяется третье действие, преимущественно за счет четвертого действия. При повторном приведении в действие второго органа ручного управления автоматически полностью отменяется первое действие, преимущественно за счет второго действия. Благодаря этому несколько последовательно выполненных действий можно снова автоматически отменить многократным приведением в действие второго органа ручного управления, в результате чего вызванное первым и третьим действиями движение пациента происходит в обратном направлении, так что следует исходить из того, что не будут выполняться никакие неподходящие для пациента движения секций операционного стола.
В качестве альтернативы или дополнительно во время выполнения первого действия можно нажать третий орган ручного управления, в результате чего выполняется, по меньшей мере, часть третьего действия во время первого действия, т.е. одновременно с ним. При приведении в действие второго органа ручного управления первое и третье действия выполняются в обратной последовательности, так что первое и третье действия отменяются, по меньшей мере, частично одновременно, преимущественно за счет второго и четвертого действий. Благодаря этому можно щадящим пациента образом автоматически восстановить прежде уже установленное положение после его изменения за счет нескольких управляющих действий.
Особенно предпочтительно, если приведением в действие четвертого органа ручного управления прежде автоматически полностью отмененное действие повторно выполняется или если приведением в действие четвертого органа ручного управления прежде автоматически полностью отмененные действия повторно полностью выполняются. Благодаря этому после отмены действия его можно автоматически снова выполнить, так что, в частности, очень просто чередовать два разных положения. Далее этим достигается то, что при случайной отмене действия его можно легко выполнить снова. Автоматическая полная отмена действия называется ″UNDO″, а повторное выполнение отмененного действия - ″REDO″.
Далее предпочтительно, если при отмене действия управляющим его выполнение приводным блоком автоматически управляют таким образом, что происходит полностью обратный процесс выполненного во время действия движения секций. За счет этого обеспечивается надежное движение пациента, поскольку происходит лишь обратный процесс уже выполненного движения, а не отличающийся от него процесс движения, при известных условиях угрожающий пациенту и при известных условиях не предусмотренный для оперирующего врача.
Далее предпочтительно, если при выполнении каждого действия регистрируются и накапливаются в качестве информации протекание по времени изменения и/или протекание по времени скорости изменения углового положения выходного вала приводного блока или выходных валов нескольких приводных блоков, протекание по времени изменения и/или протекание по времени скорости изменения углового положения приводимой в действие секции или приводимых в действие секций, причем при автоматической полной отмене действия на основе накопленной информации приводным блоком или приводными блоками управляют таким образом, что он сам автоматически выполняет полную обратную последовательность движений, нежели в случае отменяемого действия. Этим достигается то, что за счет зарегистрированной информации выполняется фактически тот же процесс движения в обратной последовательности, благодаря чему предотвращается нежелательное движение пациента.
Далее при выполнении каждого действия регистрируются и накапливаются в качестве информации последовательность шагов и/или протекание по времени последовательности шагов служащего приводным блоком шагового двигателя. При автоматической полной отмене действия на основе накопленной информации шаговым двигателем управляют с обратной по времени последовательностью шагов и/или с противоположным направлением вращения. За счет этого можно простым образом достичь обратного движения секции, которое прежде было выполнено во время отменяемого действия.
В качестве альтернативы или дополнительно при выполнении каждого действия можно регистрировать и хранить в памяти в качестве информации действие перемещения, путь перемещения, протекание по времени пути перемещения, скорость перемещения и/или протекание по времени скорости перемещения служащего в качестве приводного блока линейного привода. При отмене действия на основе хранящейся информации линейным приводом управляют таким образом, что по меньшей мере одна секция выполняет обратную последовательность движений, нежели в случае автоматически полностью отменяемого действия.
Дополнительно или в качестве альтернативы можно регистрировать и хранить в памяти в качестве информации продолжительность активирования приводного блока и/или активированной для него ступени скорости. С помощью этой информации можно простым образом управлять приводным блоком так, что можно легко вызвать обратный процесс движения.
Особенно предпочтительно, если по меньшей мере одним приводным блоком и/или множеством приводных блоков управляют посредством блока управления в зависимости от введенных приведением в действие органов ручного управления управляющих команд. За счет этого возможно простое управление приводными блоками, так что обратный процесс движения выполняется просто, если вызванное органами ручного управления действие активируется приведением в действие другого органа ручного управления для отмены действия.
Особенно предпочтительно, если блок управления сохраняет параметры выполненного действия и/или выполненных действий. За счет этого блок управления может легко гарантировать, что будет обеспечен действительно обратный процесс движения для автоматической полной отмены уже выполненного действия, что исключает угрозу пациенту.
Особенно предпочтительно, если органы ручного управления являются частью пульта дистанционного управления, преимущественно беспроводного. При этом пульт дистанционного управления в качестве альтернативы или дополнительно может хранить в памяти параметры выполненного действия и/или выполненных действий, чтобы с помощью этой хранящейся в памяти информации надежно управлять автоматической полной отменой уже выполненного действия. За счет этого существующие операционные столы могут быть снабжены также предложенной функцией для полной автоматической отмены действия.
Далее предпочтительно, если при приведении в действие первого органа ручного управления выполняются несколько действий и если при приведении в действие второго органа ручного управления несколько действий автоматически полностью отменяются в обратном порядке. Этим достигается простая и надежная последовательность движений, которая не угрожает пациенту.
Второй аспект изобретения касается устройства для управления операционным столом, включающим в себя большое число перемещаемых с помощью кнопок секций. Устройство содержит по меньшей мере один орган ручного управления, при приведении в действие которого выполняется первое действие по меньшей мере одного первого приводного блока для перемещения по меньшей мере одной первой секции операционного стола. Устройство содержит второй орган ручного управления, при приведении в действие которого выполненное приведением в действие первого органа ручного управления первое действие автоматически полностью отменяется. За счет этого можно простым образом сделать обратной последовательность движений секций операционного стола и, тем самым, изменить положение пациента и снова отменить ее, так что простым образом можно восстановить имевшееся до выполнения отменяемого действия положение секций операционного стола.
Особенно предпочтительно, если устройство передает соответствующую информацию для автоматической полной отмены действия на блок управления операционного стола. За счет этого можно легко реализовать функцию автоматической полной отмены действия.
Согласно второму аспекту изобретения устройство может быть усовершенствовано за счет приведенных выше предпочтительных вариантов способа, причем указанные признаки достигаются, в частности, при соединении устройства с операционным столом.
Другие признаки и преимущества изобретения приведены в нижеследующем описании, которое более подробно поясняет изобретение на примерах его осуществления со ссылкой на прилагаемые чертежи, на которых представляют:
- фиг. 1а: операционный стол с несколькими секциями в исходном положении, перемещаемыми с помощью органов ручного управления, являющихся частью беспроводного пульта дистанционного управления;
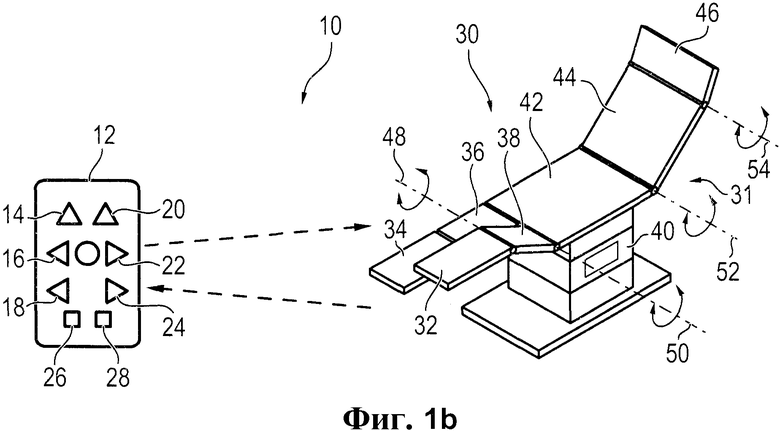
- фиг. 1b: пульт дистанционного управления и операционный стол из фиг. 1а в первом положении перемещения;
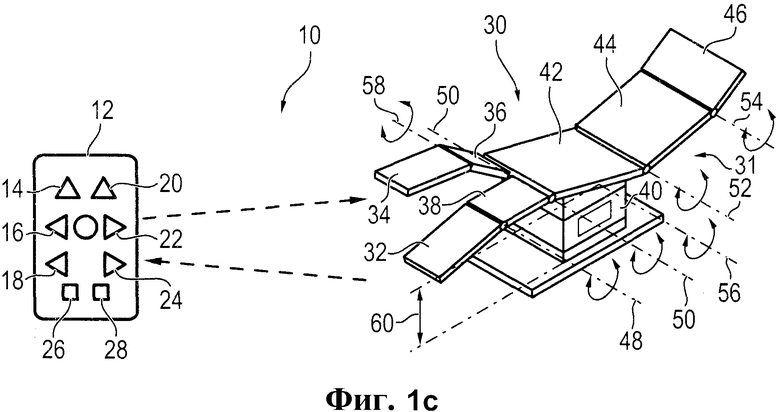
- фиг. 1с: пульт дистанционного управления и операционный стол из фиг. 1а и 1b во втором положении перемещения;
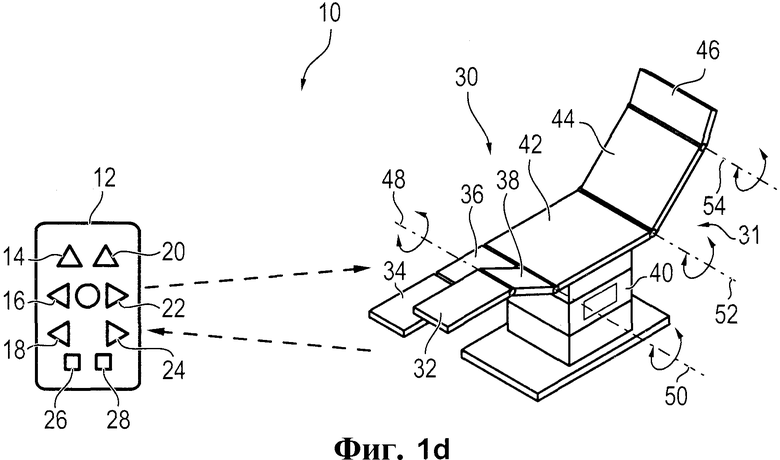
- фиг. 1d: пульт дистанционного управления и операционный стол из фиг. 1а-1с после отмены перемещения секций, произошедшей между первым и вторым положениями перемещения;
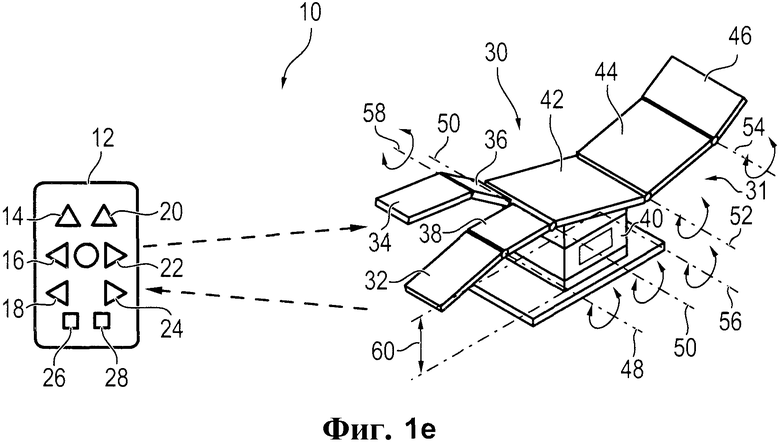
- фиг. 1е: пульт дистанционного управления и операционный стол из фиг. 1а-1d после повторного выполнения отмененного действия;
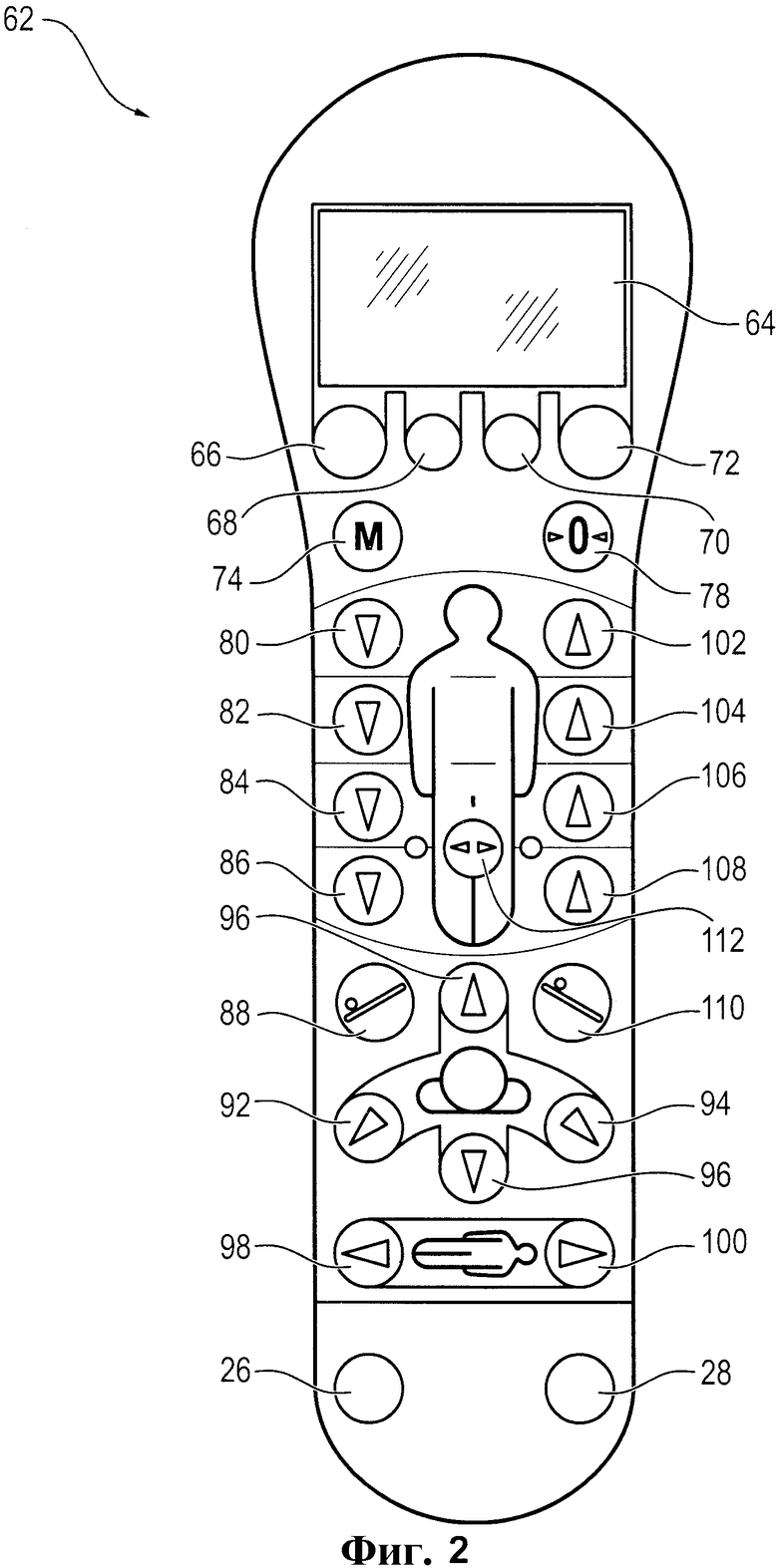
- фиг. 2: конкретный вариант выполнения пульта дистанционного управления операционным столом.
На фиг. 1а изображено устройство 10 с пультом дистанционного управления 12, содержащим несколько органов 14-28 ручного управления, с помощью которых секции 32-46 операционного стола 30 могут перемещаться, т.е. изменять свое положение в пространстве и/или по отношению к другим секциям 32-46. Отдельные секции 32-46 или их группы приданы органам ручного управления 14-24, так что при приведении в действие органов ручного управления 14-24 выполняется соответствующее действие перемещения приданной этому органу ручного управления 14-24 секции или группы секций.
За счет ввода соответствующих управляющих команд органами ручного управления 14-24 панель 31 операционного стола 30 перемещается из исходного положения на фиг. 1а в первое положение перемещения на фиг. 1b. При этом секции 32-46 с помощью встроенных в панель 31 приводных блоков были повернуты вокруг осей вращения 48, 50, 52, 54, заняв первое положение перемещения на фиг. 1b. Для этого осуществляют ввод нескольких управляющих команд органами ручного управления 14-24. Затем осуществляют ввод дальнейших управляющих команд органами ручного управления 14-24, пока секции 32-46 не займут второе положение перемещения на фиг. 1с. Для этого секции были повернуты также вокруг осей вращения 48-54 и дополнительно вокруг осей вращения 56, 58. Далее высота колонны 40 операционного стола была уменьшена, так что высота панели 31 уменьшилась из первого положения перемещения на фиг. 1b во второе положение перемещения на фиг. 1с до высоты 60.
При приведении в действие органа ручного управления 26 “UNDO“ в положении на фиг. 1с изменение положения секций 32-46 из первого положения перемещения на фиг. 1b во второе положение перемещения на фиг. 1с автоматически полностью отменяется, так что секции 32-46 снова занимают первое положение перемещения на фиг. 1d. При последующем приведении в действие органа ручного управления 28 ″REDO″ положение секций 32-46 снова изменяется из первого положения перемещения на фиг. 1d во второе положение перемещения на фиг. 1с.
В описанном варианте несколько выполненных в течение определенного отрезка времени операций управления объединяются в одно действие перемещения, которые затем все в обратной последовательности движений автоматически отменяются приведением в действие органа ручного управления 26 ″UNDO″. В другом варианте для ввода каждой управляющей команды можно хранить в памяти информацию о вызванном за счет ввода управляющей команды действии для перемещения соответствующей секции 32-46, причем тогда при приведении в действие органа ручного управления 26 ″UNDO″ можно отменить только выполненное последним действие, а прежде выполненные действия отменяются только повторным приведением в действие органа ручного управления 26 ″UNDO″. Дальнейшее дифференцирование операций управления и соответствующее хранение в памяти выполненных действий имеют то преимущество, что простым образом могут автоматически восстанавливаться различные промежуточные положения.
На фиг. 2 изображен пульт дистанционного управления 62, который может использоваться в качестве альтернативы пульту 12. Пульт 62 содержит дисплей 64 для отображения информации. Далее пульт 62 содержит множество кнопок 66-112, с помощью которых можно удобно вводить различные управляющие команды для изменения положения секций 32-46 операционного стола 30. С помощью этих органов 66-112 ручного управления можно легко вводить положение отдельных секций 32-46 или одновременно изменять положение нескольких секций. Дополнительно пульт 62 содержит орган ручного управления 26 ″UNDO″ и орган ручного управления 28 ″REDO″, выполняющие функцию, описанную выше в сочетании с пультом 12 на фиг. 1а-1е.
Перечень ссылочных позиций
10 - устройство
12, 62 - пульт дистанционного управления
14-28, 66-112 - органы ручного управления
30 - операционный стол
31 - панель операционного стола
40 - колонна операционного стола
32-46 - секции операционного стола
50-58 - оси вращения
60 - указатель высоты
64 - дисплей
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО И СПОСОБ ДЛЯ УПРАВЛЕНИЯ ОПЕРАЦИОННЫМ СТОЛОМ | 2014 |
|
RU2675442C2 |
| УСТРОЙСВО ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ, СПОСОБ ОБРАБОТКИ ИНФОРМАЦИИ И ПРОГРАММА | 2016 |
|
RU2694281C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ МОБИЛЬНЫМ ОПЕРАЦИОННЫМ СТОЛОМ | 2014 |
|
RU2635791C2 |
| Способ и устройство для удаления интеллектуального сценария | 2015 |
|
RU2635237C2 |
| СПОСОБ ПРЕДОСТАВЛЕНИЯ ЧАСТОТ БАЗОВЫМ СТАНЦИЯМ СЕТИ МОБИЛЬНОЙ ТЕЛЕФОННОЙ СВЯЗИ | 2002 |
|
RU2275757C2 |
| Операционный стол | 1973 |
|
SU536747A3 |
| СИСТЕМА ОПЕРАЦИОННОГО СТОЛА | 2014 |
|
RU2660001C2 |
| ОПЕРАЦИОННЫЙ СТОЛ | 2006 |
|
RU2338500C2 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| СИСТЕМА ПОЗИЦИОНИРОВАНИЯ МАНИПУЛЯТОРА РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2720841C1 |
Изобретение относится к способу и устройству для управления операционным столом (30), содержащим множество перемещаемых с помощью органов ручного управления секций (32-46), и направлено на упрощение перевода элементов стола в исходное положение. Приведением в действие по меньшей мере одного первого органа (14-24) ручного управления выполняется первое действие по меньшей мере одного первого приводного блока для перемещения по меньшей мере одной первой секции (32-46). Приведением в действие второго органа (26) ручного управления автоматически полностью отменяется первое действие, выполненное приведением в действие первого органа (14-24) ручного управления. 2 н. и 14 з.п. ф-лы, 6 ил.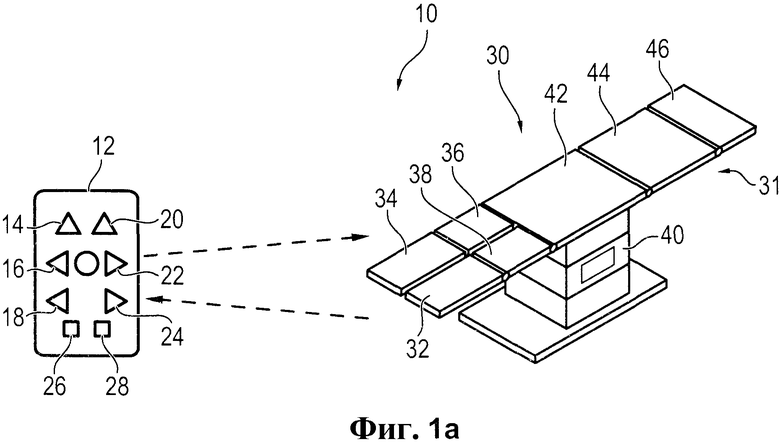
1. Способ управления операционным столом, содержащим множество перемещаемых с помощью органов (14-28) ручного управления секций (32-46), отличающийся тем, что приведением в действие по меньшей мере одного первого органа (14-24) ручного управления выполняют первое действие по меньшей мере одного первого приводного блока для перемещения по меньшей мере одной первой секции (32-46), при этом приведением в действие второго органа (26) ручного управления автоматически полностью отменяют действие, выполненное приведением в действие первого органа (14-24) ручного управления, причем первое действие автоматически полностью отменяют вторым действием, при котором первый приводной блок и/или первая секция (32-46) автоматически полностью совершает обратный процесс движения, нежели при выполнении первого действия.
2. Способ по п. 1, отличающийся тем, что приведением в действие третьего органа (14-24) ручного управления выполняют по меньшей мере одно третье действие по меньшей мере одного второго приводного блока для перемещения первой секции (32-46) и/или по меньшей мере одной второй секции (32-46) или приведением в действие второго органа (26) ручного управления автоматически полностью отменяют первое и третье действия.
3. Способ по п. 2, отличающийся тем, что приводят в действие первый орган (14-24) ручного управления, в результате чего совершается первое действие, третий орган (14-24) ручного управления приводят в действие после приведения в действие первого (14-24) органа ручного управления, в результате чего совершается третье действие после первого действия, причем при одноразовом приведении в действие второго органа (26) ручного управления автоматически полностью отменяют третье действие, а повторным приведением в действие второго органа (26) ручного управления автоматически полностью отменяют первое действие.
4. Способ по любому из пп. 1-3, отличающийся тем, что приводят в действие первый орган (14-24) ручного управления, в результате чего совершается первое действие, третий орган (14-24) ручного управления приводят в действие во время выполнения первого действия, в результате чего, по меньшей мере, часть третьего действия выполняется во время первого действия, при этом приведением в действие второго органа (26) ручного управления, по меньшей мере, частично одновременно отменяют третье действие.
5. Способ по п. 2, отличающийся тем, что приводят в действие первый орган (14-24) ручного управления, в результате чего совершается первое действие, третий орган (14-24) ручного управления приводят в действие во время выполнения первого действия, в результате чего, по меньшей мере, часть третьего действия выполняется во время первого действия, при этом приведением в действие второго органа (26) ручного управления, по меньшей мере, частично одновременно отменяют третье действие.
6. Способ по п. 1, отличающийся тем, что приведением в действие четвертого органа (28) ручного управления повторно выполняют предварительно автоматически полностью отмененное действие и/или приведением в действие четвертого органа (28) ручного управления повторно полностью выполняют предварительно автоматически полностью отмененные действия.
7. Способ по п. 2, отличающийся тем, что приведением в действие четвертого органа (28) ручного управления повторно выполняют предварительно автоматически полностью отмененное действие и/или приведением в действие четвертого органа (28) ручного управления повторно полностью выполняют предварительно автоматически полностью отмененные действия.
8. Способ по п. 1, отличающийся тем, что при отмене действия управляющим его выполнение приводным блоком управляют таким образом, что вызывают полностью обратный процесс движения секции (32-48).
9. Способ по п. 1, отличающийся тем, что при выполнении каждого действия регистрируют и хранят в памяти в качестве информации протекание по времени изменения и/или скорости изменения углового положения выходного вала приводного блока, выходных валов приводных блоков, приводимой в движение секции и/или приводимых в движение секций (32-48), причем при автоматической полной отмене действия на основе хранящейся в памяти информации приводным блоком управляют таким образом, что с его помощью автоматически выполняют полностью обратную последовательность движений, нежели при отменяемом действии.
10. Способ по п. 1, отличающийся тем, что при выполнении каждого действия регистрируют и хранят в памяти в качестве информации последовательность шагов и/или протекание по времени последовательности шагов служащего в качестве приводного блока шагового двигателя, причем при автоматической полной отмене действия на основе хранящейся в памяти информации шаговым двигателем управляют с обратной по времени последовательностью шагов и/или с противоположным направлением вращения.
11. Способ по п. 1, отличающийся тем, что при выполнении каждого действия регистрируют и хранят в памяти в качестве информации действие перемещения, путь перемещения, протекание по времени пути перемещения, скорость перемещения и/или протекание по времени скорости перемещения служащего в качестве приводного блока линейного привода, причем при отмене действия на основе хранящейся информации линейным приводом управляют таким образом, что по меньшей мере одна секция выполняет обратную последовательность движений, нежели при автоматически полностью отменяемом действии.
12. Способ по одному из пп. 10-11, отличающийся тем, что дополнительно или в качестве альтернативы регистрируют и хранят в памяти в качестве информации продолжительность активирования приводного блока и/или активированной для этого приводного блока ступени скорости.
13. Способ по п. 1, отличающийся тем, что по меньшей мере одним приводным блоком и/или несколькими приводными блоками управляют посредством блока управления в зависимости от управляющих команд, введенных приведением в действие органов (14-24) ручного управления.
14. Способ по п. 1, отличающийся тем, что в памяти блока управления хранят параметры выполненного действия и/или выполненных действий.
15. Способ по п. 1, отличающийся тем, что приведением в действие первого органа (14-24) ручного управления выполняют несколько действий, при этом приведением в действие второго органа (26) ручного управления несколько действий автоматически полностью отменяют в обратном порядке.
16. Устройство для управления операционным столом, содержащим множество перемещаемых с помощью органов ручного управления секций (32-46), отличающееся тем, что устройство (12) содержит по меньшей мере один первый орган (14-24) ручного управления, приведение в действие которого вызывает выполнение первого действия по меньшей мере одного первого приводного блока для перемещения по меньшей мере одной первой секции (32-48) операционного стола (30), при этом устройство (12) содержит второй орган (26) ручного управления, приведение в действие которого вызывает автоматически полную отмену первого действия, выполненного приведением в действие первого органа (14-24) ручного управления, причем устройство выполнено с возможностью автоматической полной отмены первого действия посредством второго действия, при котором совершается автоматический полный обратный процесс движения первого приводного блока и/или первой секции (32-46), нежели при выполнении первого действия.
| US 2006080777 A1, 20.04.2006 | |||
| СТОЙКИЕ ПРИ ХРАНЕНИИ ПРОДУКТОВЫЕ СИСТЕМЫ ДЛЯ ПРЕМИКСОВ | 2009 |
|
RU2508160C2 |
| US 6000076 A, 14.12.1999 | |||
| УСТРОЙСТВО ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ПРОДОЛЬНОГО И ВЕРТИКАЛЬНОГО ПЕРЕМЕЩЕНИЯ ПОЗИЦИОННОГО С РАЗВОРОТНЫМ МЕХАНИЗМОМ ИНСТРУМЕНТАЛЬНОГО СТОЛА МНОГОФУНКЦИОНАЛЬНОГО ДИАГНОСТИКО-ХИРУРГИЧЕСКОГО ОПЕРАЦИОННОГО СТОЛА С ВОЗМОЖНОСТЬЮ ИНФОРМАЦИОННО-КОМПЬЮТЕРНОГО УПРАВЛЕНИЯ ИМ. Ю.И. РУСАНОВА | 2011 |
|
RU2468781C1 |

