Область техники, к которой относится изобретение
Изобретение относится к области машиностроения, а именно к механизмам - мехатронным комплексам, предназначенным для решения технологических задач с помощью инструментов, закрепленных в манипуляторы, управление которыми выполняется в ручном режиме с использованием цифрового контроллера оператора и/или в автоматическом режиме, когда управляющие команды задает система числового программного управления (ЧПУ). Мехатронный комплекс может быть применен в следующих областях: роботизация, телеоперация, минимальная инвазивная хирургия, тренажеры и других. Более конкретно, изобретение может относиться к области ассистирующих роботизированных хирургических комплексов для проведения минимально инвазивных хирургических операций и для симуляции таких хирургических операций в виртуальной среде.
Предпосылки создания изобретения
Возрастающие запросы к качеству хирургического лечения требуют существенного совершенствования хирургических технологий. Традиционные технологии хирургического лечения во многом исчерпали возможность быть усовершенствованными, и не могут решить поставленных задач. Это связано, прежде всего, с физиологическими возможностями человека/хирурга, ограниченной точностью перемещения его рук, тремором рук, ограниченностью остроты зрения, значительным размером рук, ограниченной скоростью рук и другими факторами. Требуется принципиально новая, способная преодолеть перечисленные ограничения и недостатки хирургическая технология, открывающая новые рубежи значительного совершенствования хирургии. Наиболее существенным параметром развития хирургии является показатель точности манипулирования хирургическим инструментом. Традиционно, когда инструмент удерживает хирург в руках, эта величина ограничивается величиной 0,1 мм. И это у лучших хирургов. Однако, предел/рубеж развития хирургии по этому параметру находится в диапазоне 0,01 мм, что соответствует размеру крупной клетки. Чем ближе к этой границе приблизится хирургическая технология, тем большим преимуществом она будет обладать, а именно, - позволит делать минимальным операционное поле, тем самым минимизировать травму тканей во время операции, сохранять нервные окончания, сшивать мелкие сосуды, полностью удалять мелкие, вплоть до размера клетки, новообразования и другое.
Наиболее активно развивающейся на сегодня альтернативой традиционной хирургии является роботохирургия. Роботохирургия - инновационная, ранее недоступная хирургическая технология, во многом ставшая возможной благодаря развитию мехатроники и информационных технологий, доказавшая свою состоятельность в клиниках мира и обеспечивающая новую, качественную медицину.
Использование в хирургии робота, а корректнее, ассистирующего мехатронного комплекса, позволяет получить недоступные ранее врачу функциональные возможности и качество: возможность проникать к труднодоступным областям и оперировать их; более высокую точность и заданную скорость перемещения миниатюрных инструментов; отсутствие тремора; жесткость и другое. Робот-ассистированные операции имеют множество преимуществ перед традиционными операциями: например, они позволяют, в значительной мере, уменьшить объем интраоперационной кровопотери и сократить частоту гемотрансфузий. Процедуры такого рода менее травматичны, и поэтому в реабилитационном периоде болевой синдром у пациентов не столь выражен как при традиционном подходе.
Традиционный роботохирургический комплекс реализует хирургическую технологию, при которой мини-инструмент, управляемый манипулятором, воздействует на операционное поле, будучи доставленным к нему через небольшие проколы в теле пациента. Возможность видеть операционное поле обеспечивает камера, которая транслирует сигнал на 3D монитор. Камера, как и инструмент, вводится через прокол и управляется отдельным манипулятором. Действия/команды инструментам и камере через манипуляторы задает контроллер оператора, управляемый руками хирурга. Рабочее место хирурга в составе двух контроллеров и 3D монитора находится на значительном расстоянии от хирургического стола. Это создает отличие и значительные преимущества в сравнении с традиционной лапароскопической операцией. Хирург оперирует сидя, в удобной позе, меньше утомляется и не теряет концентрацию. Также, в отличие от лапароскопии, перемещение управляющих движений рук хирурга может быть мультиплицировано при передаче на манипулятор и инструмент с коэффициентом больше и меньше 1.
Роботохирургия активно внедряется в клиники мира, прежде всего, благодаря роботу DA VINCI компании Intuitive Surgical Inc. Многие компании пытаются создать ему конкуренцию и также выйти на рынок.
Например, хирургический робот, разработанный испанской компанией Tecnalia и университетом Малага, раскрыт в международной заявке WO2017220822 A1. Цель проекта – обеспечение больниц доступной роботизированной хирургией, которая предлагает высокую точность проведения операций, в диапазоне требований лапароскопии. Робот состоит из трех шестиосевых (шестистепенных) рук-манипуляторов, которые могут функционировать совместно или по отдельности, в соответствии с требованиями операции. Роботизированные манипуляторы были выбраны для этого проекта из-за их простой системы программирования, которая позволяет инженерам адаптировать свое программное обеспечение к конкретным потребностям хирургических операций. Каждая рука весит не более 18 килограмм, что позволяет легко устанавливать их на вертикальной опоре, которая была адаптирована для избежания необходимости в прокладке длинного кабеля и тем самым позволяющая свободные и беспрепятственные движения медицинских работников по всей операционной. Робот также включает в себя экран для 3D Vision, что позволяет хирургу расширить свое поле зрения для лучшего контроля работы пары джойстиков, которые имитируют инструменты лапароскопии.
При сопоставлении уже выполненных разработок и запатентованных технических решений важно определить, с каких позиций, и по каким параметрам выполнять такое сравнение. Независимо от типа или вида технической реализации, роботохирургические технологии имеют свои базовые, формирующие их особенности и преимущественные параметры/признаки. Ими являются: снятие тремора, точность перемещения инструмента, в том числе превосходящее традиционную лапароскопию, и функциональные возможности/особенности. Именно с позиций сопоставления этих параметров целесообразно выполнять анализ патентов роботохирургических комплексов.
В конце сентября 2019 года компания Medtronic представила роботизированную хирургическую платформу Hugo, которая много лет находится в процессе разработки. Компания обещает, что новый робот-хирург с модульной системой комплектации позволит снизить себестоимость многих операций и расширит область применения хирургической робототехники. Платформа модуля состоит из открытой консоли хирурга, системы визуализации и роботизированных манипуляторов с хирургическими инструментами. При этом система визуализации и многие инструменты, такие как хирургические степлеры, могут использоваться как в роботизированных, так и в лапароскопических процедурах, а различные компоненты могут обновляться по мере финансовых возможностей больницы.
В середине ноября 2019 года робот-хирург компании Corindus, которую несколькими неделями ранее купила Siemens, провел первую нейрососудистую операцию. Процедуры выполнялись по беспроводной сети 5G, специально выделенным оптоволоконным соединениям и коммерческим сетям общего пользования, врачом, который находился в 3000 милях от пациентов. Сети обеспечивали соединение с малой задержкой и успешное проведение дистанционных процедур. Система CorPath GRX позволила врачу в реальном времени контролировать действия робота из удаленного местоположения. Полученные результаты позволят интервенционным кардиологам использовать роботизированные технологии для безопасного и эффективного дистанционного выполнения коронарных процедур в любой точке страны. Такой подход сократит время ожидания операции и расширит доступ к высококвалифицированной медицинской помощи. Данная технология раскрыта в международной заявке WO2019222641 A1.
Анализ уже созданных, создаваемых или только патентуемых роботохирургических комплексов позволяет отметить как их инновационные отличия, так и обратить внимание на существенные недостатки и замечания. Известные из уровня техники решения не позволяют в одной конструкции роботохирургического комплекса решить следующую совокупность проблем:
1. Реализовать одно из важнейших преимущество роботохирургии - создать условия, позволяющие хирургическому инструменту во время операции перемещаться/позиционироваться относительно тканей операционного поля в диапазоне точности, превосходящем точность руки хирурга, особенно при автоматическом, без компенсирующих команд врача, управлении.
2. Реализовать другое важнейшее преимущество роботохирургии - создать новые, ранее не существовавшие хирургические и технологические приемы, тем самым значительно обогатить и расширить функциональный арсенал хирурга.
3. Обеспечить условия для автоматизированного и автоматического выполнения роботохирургических операций.
4. Обеспечить легкость перемещения контроллера для управления хирургическим роботом на всей амплитуде рук хирурга.
5. Обеспечить преобразование команд от перемещения рук в отмасштабированные перемещения хирургического инструмента, при этом:
масштаб не ограничен и зависит только от задач на операцию;
масштабирование может происходить как в сторону увеличения, так и в сторону уменьшения.
6. Сократить, по сравнению с традиционной роботохирургией, подготовительно-заключительное время операции.
Перечисленные проблемы понижают эффективность работы роботохирургического комплекса и не дают возможность в полной мере реализовать преимущества роботохирургических технологий.
Именно решению перечисленных проблем посвящена данная заявка.
Суть изобретения
Техническая задача и достигаемый технический результат настоящего изобретения заключаются в создании ассистирующего хирургического комплекса, превосходящего по ключевым требованиям роботохирургии прототипы и аналоги на основе новой архитектуры, ставшей возможной благодаря новым свойствам ключевых блоков и новой структуре их взаимодействия, что обеспечивает:
- возможность достичь значений точности, превосходящих возможности рук хирурга, без компенсирующих команд врача при управлении;
- более полный набор роботохирургических функций, реализуемых комплексом, в том числе функций, выполняемых автоматизированно;
- возможность получать на руку, удерживающую контроллер оператора, тактильные ощущения от тканей пациента при соприкосновении с ними инструмента во время операции;
- удобство и легкость работы хирурга при управлении контроллером оператора на полной амплитуде движения рук для формирования команд, отмасштабированных (пропорционально увеличенных или уменьшенных по величине) перемещений инструмента, при этом масштаб не имеет ограничений;
- автоматизированное и автоматическое движение инструмента и других элементов комплекса по заданной команде от системы числового программного управления (ЧПУ);
- возможность управляемого поворота камеры во время проведения операции на любой допустимый угол поворота с одновременной коррекцией с учетом этого поворота системы координат инструментов и контроллера;
- значительное сокращение подготовительно-заключительного времени операции.
При этом разрабатываемый ассистирующий хирургический комплекс должен быть также универсальным и адаптироваться/локализоваться к различным видам хирургического вмешательства.
С целью решения поставленных задач был разработан ассистирующий хирургический комплекс, подробно описанный ниже.
Ассистирующий хирургический комплекс для выполнения высокоточных малоинвазивных хирургических операций содержит исполнительную консоль пациента, которая включает по меньшей мере один комбинированный манипулятор с установленным на нем хирургическим инструментом для выполнения хирургической операции, по меньшей мере один манипулятор камеры с закрепленной на нем камерой для обзора операционного поля, обеспечивающий ее перемещение по трем поступательным степеням свободы; систему позиционирования по меньшей мере одного манипулятора, закрепленную на по меньшей мере одной продольной стороне хирургического стола и сконфигурированную для хранения по меньшей мере одного манипулятора под хирургическим столом в нерабочем положении и автоматического независимого выдвижения и перемещения каждого из манипуляторов в заданной области операционной зоны в рабочем положении, средства для вычисления и оценки сил, действующих на дистальном конце хирургического инструмента, и сил, действующие на другие рабочие части хирургического инструмента, входную консоль оператора, которая включает: по меньшей мере один контроллер оператора для управления движением хирургического инструмента, установленного на указанном комбинированном манипуляторе, сконфигурированный для обеспечения независимых семи степеней свободы при возникновении соответствующих управляющих усилий и/или движений со стороны руки оператора для поворота и/или перемещения контроллера рукой оператора, при этом контроллер оператора выполнен с возможностью переключения в режим управления камерой с помощью педали управления; и цифровой блок управления контроллером оператора, который по каждой степени подвижности контроллера оператора формирует сигнал движения руки оператора и преобразует его в управляющий сигнал для последующего управления комбинированным манипулятором и/или хирургическим инструментом и/или манипулятором камеры, систему числового программного управления ассистирующего хирургического комплекса, связанную с по меньшей мере одним комбинированным манипулятором, манипулятором камеры, со средствами вычисления и оценки сил, с системой позиционирования манипуляторами, с цифровым блоком управления контроллером, выполненную с возможностью одновременного и независимого управления всеми элементами комплекса в целом, для формирования управляющих сигналов, характеризующих силовое воздействие по каждой степени подвижности хирургического инструмента и/или воздействие, рассчитанное на основе заданной модели, и передачи этих сигналов в цифровой блок управления контроллером оператора для их преобразования в механические движения элементов контроллера оператора,
причем комбинированный манипулятор включает механизм, снабженный приводными элементами и выполненный в виде соединенных между собой посредством трех штанг неподвижной опорной платформы и подвижной платформы, подвижная платформа механизма выполнена с возможностью размещения на ней хирургического инструмента, и портальный механизм, выполненный в виде модуля поперечного перемещения и модуля продольного перемещения, каждый из которых снабжен блоком приводов,
при этом приводные элементы и блоки приводов выполнены с возможностью передачи и/или получения данных от системы числового программного управления ассистирующего хирургического комплекса,
при этом механизм установлен на модуле поперечного перемещения с возможностью перемещения по нему в поперечном направлении, а модуль поперечного перемещения установлен на модуле продольного перемещения с возможностью перемещения по нему в продольном направлении;
причем все элементы системы позиционирования оснащены сервоприводами и контроллерами, выполненными с возможностью приема и передачи управляющих команд от системы числового программного управления ассистирующего хирургического комплекса для выполнения элементами системы согласованных движений,
причем средства для вычисления и оценки сил включают трехосевой нижний тензометрический датчик, расположенный на опоре манипулятора в месте закрепления троакара и находящийся в непосредственном контакте с ним, для измерения сил, приложенных к инструменту и направленных вдоль осей х и у, трехосевой верхний тензометрический датчик, расположенный на опоре манипулятора под приводом хирургического инструмента, для измерения силы, приложенной к инструменту и направленной вдоль оси z, датчик усилия захвата исполнительных поверхностей инструмента, выполненный в виде датчика силы тока для электродвигателя привода инструмента, обеспечивающего сжатие исполнительных поверхностей инструмента, датчик момента вращения хирургического инструмента, выполненный в виде датчика силы тока для электродвигателя привода инструмента, обеспечивающего вращение хирургического инструмента вокруг его продольной оси,
причем тензометрические датчики соединены с соответствующими модулями цифровой обработки данных, а датчик усилия захвата и датчик момента вращения соединены с соответствующими системами управления электродвигателем,
модули цифровой обработки и системы управления электродвигателями соединены с модулем обработки, который запрограммирован для осуществления вычисления посредством групповой обработки и синхронизации сигналов от тензометрических датчиков, датчика момента вращения и датчика усилия захвата: сил, направленных вдоль линейных осей, вращательных моментов инструмента вдоль осей х и у относительно точки ввода троакара в тело пациента, вращательного момента инструмента вдоль оси z относительно точки ввода троакара в тело пациента, усилия сжатия исполнительных поверхностей инструмента, модуль обработки выполнен с возможностью передачи данных на систему числового программного управления ассистирующего хирургического комплекса,
причем контроллер оператора включает дельта-робот, приводимый в движение с помощью приводного механизма, каждое звено которого выполнено в виде кривошипно-шатунного механизма, приводимого в движение сервоприводом с шарико-винтовой передачей; тензоплатформу, установленную между подвижной платформой и неподвижной опорной платформой дельта-робота, причем на тензоплатформе расположены сопряженные с каждой шарико-винтовой передачей тензодатчики; при этом к подвижной платформе прикреплена управляющая ручка с возможностью ее охвата кистью руки оператора и сконфигурированная для контроля и преобразования в цифровой сигнал движения руки оператора по меньшей мере по трем вращательным степеням свободы и силового воздействия на тензоплатформу по трем линейным степеням свободы,
при этом формирующийся на тензодатчиках сигнал передаётся на цифровой блок управления контроллером, который рассчитывает и передает на сервопривод соответствующего звена приводного механизма команды компенсации веса и/или перемещения по планируемой траектории, рассчитанной на основе полученных данных,
причем система числового программного управления ассистирующего хирургического комплекса выполнена с возможностью компенсации движения при управлении движением камеры.
В некоторых вариантах осуществления изобретения управляющая ручка контроллера оператора включает контроллер запястья, обеспечивающий две вращательные степени свободы в ортогональных плоскостях, и контроллер кисти, обеспечивающий две другие вращательные степени свободы.
В некоторых вариантах осуществления изобретения контроллер кисти оснащен рукояткой и пальцевыми схватами.
В некоторых вариантах осуществления изобретения внутри рукоятки контроллера кисти установлен по меньшей мере один приводной элемент и датчик поворота.
В некоторых вариантах осуществления изобретения контроллер запястья оснащен, по меньшей мере, одним приводным элементом и датчиком поворота.
В некоторых вариантах осуществления изобретения по меньшей мере один манипулятор в нерабочем положении находится под хирургическим столом в части для расположения ног.
Теоретические обоснования, подтверждающие достижение поставленных технической задачи и технического результата при использовании ассистирующего хирургического комплекса.
Одним из главных и безусловно востребованных преимуществ роботохирургии являются значительные, недоступные при прежних техниках выполнения операций (открытая или лапароскопическая), технологические возможности инструмента для выполнения операции. Наиболее значимыми, сущностными для роботохирургии технологическими возможностями являются: перемещения по семи (три поворота, три линейных перемещения и одно открытие браншей) и более осям исполнительных поверхностей хирургического инструмента во время операции; перемещение хирургического инструмента, при необходимости, во время операции с точностью, превосходящей предельно допустимую точность руки хирурга. В последний показатель входит как непосредственно точность перемещения удерживающей инструмент руки хирурга, так и косвенное воздействие на этот показатель из-за наличия тремора руки.
Современная роботохирургия имеет два выраженных направления развития:
По роботохирургическому типу движения хирургического инструмента – семь осей перемещения исполнительных поверхностей инструмента. По лапароскопическому типу движения хирургического инструмента – четыре (три линейных перемещения и одно открытие браншей) оси перемещения исполнительных поверхностей инструмента.
Для вышедших или выходящих на рынок хирургических роботов заявляемая (паспортная) точность перемещения инструмента уступает точности перемещения руки хирурга. Этот факт значительно сокращает функционал таких роботов и не позволяет раскрыть возможности роботохирургии в полной мере.
Такая ситуация имеет общую тенденцию по всем роботам, разрабатываемым как функциональный конкурент робота Da Vinci. Основная причина такой ситуации связана со сложностью конструкции роботохирургичсеких комплексов, имеющих значительное количество звеньев/элементов, влияющих на точность. Преодолеть этот барьер возможно только принципиально изменив архитектуру хирургического робота. Новая архитектура должна содержать как новый структуру (архитектуру) и состав мехатронных блоков и элементов и механических связей между ними, так и новую, полностью цифровую архитектуру управления роботохирургическим комплексом.
Данная заявка имеет целью предложить новую архитектуру ассистирующего комплекса, потенциально способную, при необходимости у хирурга, преодолеть точностный барьер и снять ограничения развития роботохирургии.
Поставленные задача и технический результат достигаются благодаря тому, что в комплексе в качестве модульных элементов используются новые, разработанные под задачи роботохирургии, блоки, составляющие ассистирующий хирургический комплекс, а также более совершенные архитектуры их механических и информационных связей, при этом информационное взаимодействие всех элементов комплекса полностью цифровое, в единой цифровой среде.
1. Достижение значений точности, превосходящей возможности рук хирурга, обеспечивается как результат сочетания свойств и особенностей блоков хирургического комплекса, взаимодействующих во время работы. При этом отдельными блоками, свойства и особенности которых создают условия для решения поставленной задачи, являются:
A. Комбинированный манипулятор ассистирующего хирургического комплекса, влияющий на достижение поставленной задачи повышенными характеристиками жесткости конструкции и динамической точности за счет выполнения конструкции манипулятора в виде двухкомпонентного пространственного механизма, который представляет собой усовершенствованный трипод в сочетании с портальным механизмом его линейных перемещений над рабочей областью. Такая кинематическая схема позволяет обеспечить достаточную подвижность хирургического инструмента и угол поворота хирургического инструмента.
B. Контроллер оператора ассистирующего хирургического комплекса, влияющий на достижение поставленной задачи и поставленного технического результата повышенной точностью определения положения рук оператора/хирурга во всем возможном диапазоне их перемещения за счет использования в конструкции контроллера оператора механизма дельта – робота, тензоплатформы, расположенной между подвижной и неподвижной площадками механизма дельта-робота и цифрового блока управления контроллером.
C. Система позиционирования манипулятора ассистирующего хирургического комплекса, влияющая на достижение поставленной задачи и поставленного технического результата благодаря жесткости конструкции и возможности крепления манипулятора непосредственно на операционный стол к стандартным точкам присоединения дополнительного оборудования, что обеспечивает минимальное количество звеньев/элементов, погрешность которых влияет на точность перемещения инструмента.
D. Система числовая программного управления (ЧПУ) ассистирующего хирургического комплекса, влияющая на достижение поставленной задачи и поставленного технического результата благодаря контролю, коррекции и компенсации положения инструмента при его перемещении и отклонении от нужного положения, задаваемого хирургом. Система ЧПУ обеспечивает преобразование координат каждого элемента контроллера оператора при его управлении хирургом в координаты исполнительного устройства, в качестве которого выступает манипулятор с закрепленным в него хирургическим инструментом и /или непосредственно сам хирургический инструмент. Также система ЧПУ осуществляет формирование сигналов управления приводами по каждой степени подвижности исполнительного устройства таким образом, чтобы его движение соответствовало направлению, в котором оператор-хирург воздействовал на механизм управляющего контроллера, и оно было для него интуитивно понятно.
E. Система оценки усилий на роботохирургическом инструменте ассистирующего хирургического комплекса, влияющая на достижение поставленной задачи и поставленного технического результата благодаря выявлению природы, направления и величины сил, воздействующих на хирургический инструмент во время работы (во время проведения хирургической операции) на основании измерения величины перемещения инструмента в зоне используемых многоосевых тензометрических датчиков, один из которых расположен на опоре манипулятора под приводом хирургического инструмента, а другой – в месте закрепления троакара, и каждый из которых соединен с модулем цифровой обработки поступающих данных.
2. Достижение более полного набора роботохирургических функций, реализуемых предлагаемым хирургическим комплексом, в том числе функций, выполняемых автоматизировано, обеспечивается как результат сочетания свойств и особенностей блоков комплекса взаимодействующих во время работы. При этом свойствами и особенностями отдельных блоков, которые создают условия для решения поставленной задачи и поставленного технического результата, являются:
Комбинированный манипулятор ассистирующего хирургического комплекса, влияющий на достижение поставленной задачи и поставленного технического результата тем, что конструкция его спроектирована из возможности наиболее полно реализовать роботохирургические технологии, при этом блок является полностью мехатронным и цифровым и имеет контур как прямой, так и обратной связи.
Контроллер оператора ассистирующего хирургического комплекса, влияющий на достижение поставленной задачи и поставленного технического результата тем, что конструкция его спроектирована из возможности наиболее полно реализовывать роботохирургические технологии, при этом блок является полностью мехатронным и цифровым и имеет контур как прямой, так и обратной связи.
Система позиционирования манипулятора ассистирующего хирургического комплекса, влияющая на достижение поставленной задачи и поставленного технического результата тем, что обладает свойствами позиционировать манипуляторы в различные, необходимые для выполнения роботических операций позиции, при этом являясь полностью мехатронной и цифровой и имеет контур как прямой, так и обратной связи.
Система числового программного управления (ЧПУ) ассистирующего хирургического комплекса, влияющая на достижение поставленной задачи и поставленного технического результата тем, что обеспечивает полностью цифровое управление как отдельных блоков и узлов, так и комплекса в целом.
3. Достижение возможности получать на руку хирурга, удерживающую контроллер, тактильные ощущения от тканей пациента при соприкосновении с ними инструмента во время операции, обеспечивается как результат сочетания свойств и особенностей блоков комплекса, взаимодействующих во время работы. При этом свойствами и особенностями отдельных блоков, которые создают условия для решения поставленной задачи, являются:
Комбинированный манипулятор ассистирующего хирургического комплекса, который влияет на достижение поставленной задачи и поставленного технического результата тем, что является полностью мехатронным и цифровым и имеет контур как прямой, так и обратной связи.
Контроллер оператора ассистирующего хирургического комплекса, который влияет на достижение постеленной задачи и поставленного технического результата тем, что является полностью мехатронным и цифровыми, и имеет контур как прямой, так и обратной связи.
Система числового программного система управления (ЧПУ) ассистирующего хирургического комплекса, которая влияет на достижение поставленной задачи и поставленного технического результата тем, что обеспечивает полностью цифровое управление контроллером оператора, манипулятором и системой оценки усилия на инструменте, отдельно по каждому блоку и при их взаимодействии.
Система оценки усилия на роботохирургическом инструмента, которая влияет на достижение поставленной задачи и поставленного технического результата благодаря оценке усилий на инструменте и повышению достоверности выявления их источников, а также благодаря наличию в конструкции следующих свойств: возможностью оценки сил, действующих на хирургический инструмент роботизированной хирургической системы, приложенных к любой части его конструкции; возможности однозначно определять направление и численное значение приложенной к хирургическому инструменту силы; возможностью бесперебойной работы системы оценки сил в условиях использования электрокоагуляции хирургическим инструментом; возможностью измерения силы захвата, возникающей при смыкании браншей хирургического инструмента; обеспечению возможности передачи данных об измеренных силах на внешние системы управления роботохирургическим комплексом; устойчивостью к электромагнитным помехам от бытовой сети; возможностью использования измерительных датчиков различного типа и принципа действия для разных степеней свободы.
4. Достижение удобства и легкости работы хирурга при управлении контроллером на полной амплитуде движения рук для формирования команд отмасштабированных (пропорционально увеличенных или уменьшенных по величине) перемещений инструмента при масштабе, не имеющем ограничений, обеспечивается как результат сочетания свойств и особенностей блоков комплекса, взаимодействующих во время работы. При этом свойствами и особенностями отдельных блоков, которые создают условия для решения поставленной задачи, являются:
Комбинированный манипулятор ассистирующего хирургического комплекса, который влияет на достижение поставленной задачи повышенными характеристиками жесткости конструкции и ее динамической точности.
Контроллер оператора ассистирующего хирургического комплекса, который влияет на достижение поставленной задачи полностью цифровой мехатронной реализованной конструкцией, позволяющей осуществлять взаимодействие оператора/хирурга посредством руки, в любом диапозоне их перемещеия, с хирургическим комплексом и непосредственно с входящим в состав комплекса манипулятором, как задавая ему команду, так и получая обратные реакции в ответ.
Система числового программного управления (ЧПУ) ассистирующего хирургического комплекса, которая влияет на достижение поставленной задачи благодаря полностью цифровой системе управления и алгоритму расчета движения манипулятора, преобразование его в команды для манипулятора.
5. Достижение значительного сокращения подготовительно-заключительного времени операции обеспечивается как результат сочетания свойств и особенностей блоков комплекса, взаимодействующих во время работы. При этом свойствами и особенностями отдельных блоков, которые создают условия для решения поставленной задачи, являются:
Комбинированный манипулятор ассистирующего хирургического комплекса, который влияет на достижение поставленной задачи тем, что является компактным, имеет малый вес, полностью мехатронным и цифровым.
Система позиционирования манипуляторов ассистирующего хирургического комплекса, которая влияет на достижение поставленной задачи благодаря жесткости крепления манипуляторов при одновременном увеличении возможных положений манипуляторов относительно пациента и повышении скорости и снижении времени переведения манипуляторов в рабочее положение (рабочую зону) и обратно в зону хранения, расположенную под ножной частью столешницы операционного стола таким образом, чтобы сохранить традиционные функциональные возможности стола, что позволяет быстро прервать роботохирургическую операцию и продолжить ее в режиме полостной операции.
Система числового программного управления (ЧПУ) ассистирующего хирургического комплекса, которая влияет на достижение поставленной задачи тем, что обеспечивает полностью цифровое управление системой позиционирования манипулятора и комбинированным манипулятором, как отдельными блоками, так и их совместной работой.
6. Достижение автоматизированного и автоматического движения инструмента и других элементов комплекса по заданной команде от системы числового программного управления (ЧПУ) обеспечивается как результат сочетания свойств и особенностей блоков комплекса, взаимодействующих во время работы. При этом свойствами и особенностями отдельных блоков, которые создают условия для решения поставленной задачи, являются:
A. Комбинированный манипулятор ассистирующего хирургического комплекса, который влияет на достижение поставленной задачи тем, что является полностью мехатронным и цифровым
B. Контроллер оператора ассистирующего хирургического комплекса, который влияет на достижение поставленной задачи полностью цифровой мехатронной реализованной конструкцией.
C. Система позиционирования манипулятора ассистирующего хирургического комплекса, которая влияет на достижение поставленной задачи тем, что является полностью мехатронной и цифровой.
D. Система числового программного управления (ЧПУ) ассистирующего хирургического комплекса, которая влияет на достижение поставленной задачи благодаря полностью цифровой системе управления манипулятором, контроллером оператора и системой позиционирования комплекса.
7. Достижение возможности управляемого поворота камеры во время проведения операции на любой допустимый угол поворота с одновременной коррекцией с учетом этого поворота системы координат инструментов и контроллера обеспечивается как результат сочетания свойств и особенностей блоков комплекса, взаимодействующих во время работы. При этом свойствами и особенностями отдельных блоков, которые создают условия для решения поставленной задачи, являются:
A. Комбинированный манипулятор ассистирующего хирургического комплекса, который влияет на достижение поставленной задачи тем, что является полностью мехатронным и цифровым
B. Контроллер оператора ассистирующего хирургического комплекса, который влияет на достижение поставленной задачи тем, что является полностью цифровой мехатронной реализованной конструкцией.
C. Система компенсации камерой ассистирующего хирургического комплекса, которая влияет на достижение поставленной задачи тем, что является полностью мехатронной и цифровой и имеет специальный блок расетов и управления.
Объекты и преимущества настоящего изобретения станут более очевидны специалистам после рассмотрения следующего подробного описания и чертежей.
Краткое описание чертежей
Прилагаемые чертежи, которые включены в состав настоящего описания и являются его частью, иллюстрируют варианты осуществления изобретения и совместно с вышеприведенным общим описанием изобретения и нижеприведенным подробным описанием вариантов его осуществления служат для пояснения принципов настоящего изобретения.
Фиг. 1 изображает структурную модель робохирургического комплекса, которая применяется для настоящего изобретения.
Фиг. 2 иллюстрирует схематическое изображение конкретного варианта осуществления ассистирующего хирургического комплекса.
Фиг. 3 иллюстрирует перспективный вид контроллера, предназначенного для управления оператором мехатронными устройствами ассистирующего хирургического комплекса.
Фиг. 4 иллюстрирует разработанную модель контроллера оператора с блоком-позиционирования, выполненным в виде дельта-робота.
Фиг. 5 иллюстрирует блок позиционирования контроллера оператора.
Фиг. 6 иллюстрирует общий вид конструкции манипулятора.
Фиг. 7 изображает общий вид модели трипода с установленным на его подвижной платформе хирургическим инструментом.
Фиг. 8 иллюстрирует общий вид конструкции манипулятора с установленным на его подвижной платформе хирургическим инструментом.
Фиг. 9 иллюстрирует схематическое изображение хирургического инструмента, расположенного на опоре, закрепленной на манипуляторе.
Фиг. 10 изображает архитектуру системы оценки сил.
Фиг. 11 иллюстрирует механизм системы позиционирования манипуляторов и крепления ее к операционному хирургическому столу.
Фиг. 12 иллюстрирует общий вид сборки системы позиционирования манипуляторов в рабочем положении.
Фиг. 13 отражает блок-схему алгоритма работы системы автоматического управления манипулятором камеры.
Фиг. 14 иллюстрирует взаимодействие рук хирурга с контроллером управления при нефрэктомии.
Фиг. 15 иллюстрирует наиболее частое расположение рук хирурга при проведении операции.
Термины и определения
Для лучшего понимания настоящего изобретения ниже приведены некоторые термины, использованные в настоящем описании изобретения. Если не определено отдельно, технические и научные термины в данной заявке имеют стандартные значения, общепринятые в научной и технической литературе.
В настоящем описании и в формуле изобретения термины «включает», «включающий» и «включает в себя», «имеющий», «снабженный», «содержащий» и другие их грамматические формы не предназначены для истолкования в исключительном смысле, а, напротив, используются в неисключительном смысле (т.е., в смысле «имеющий в своем составе»). В качестве исчерпывающего перечня следует рассматривать только выражения типа «состоящий из».
В настоящих материалах заявки под терминами «роботизированный технологический комплекс», «роботизированная система», «роботизированный комплекс», «роботохирургический комплекс», «роботохирургическая система», «ассистирующий хирургический комплекс» понимают сложные системы или комплексы в хирургии с использованием робота-ассистента во время операции. «Робот-ассистивные системы» или «робот-ассистированные хирургические системы» - это роботизированные системы, предназначенные для проведения медицинских операций. Это не автономные, автоматическое устройства, робот-ассистирующая системами при проведении операции управляют хирурги.
В настоящих материалах заявки под термином «мехатронный комплекс» или «мехатронная система» понимают комплекс или систему с компьютерным управлением движения, которые базируются на знаниях в области механики, электроники и микропроцессорной техники, информатики и компьютерного управления движением машин и агрегатов.
В настоящей заявке под термином «оператор» понимают производящего операции врача-хирурга. Признаки «оператор» и «хирург» в настоящем описании изобретения являются синонимами.
В настоящих материалах заявки под термином «манипулятор» понимают мехатронный механизм, предназначенный для закрепления и перемещения (изменения положения) хирургического инструмента во время выполнения хирургической операции в соответствии с заданными командами от системы управления роботохирургического комплекса.
В настоящих материалах заявки под термином «портальный механизм» понимают механизм роботизированной системы, состоящий из двух опорных (портальных) рам, имеющих возможность по команде от системы управления роботохирургического комплекса перемещаться одна относительно другой по осям, расположенным под углом 90° друг относительно друга.
В настоящих материалах заявки под терминами «модуль продольного перемещения» и «модуль поперечного перемещения» понимают механизмы, обеспечивающие взаимно-перпендикулярное движение того или иного элемента относительно друг друга.
В настоящей заявке под термином «хирургический инструмент», «инструмент» понимают специальный инструмент небольшого размера, который закрепляют в хирургическом роботе для проведения операций. Во время хирургической операции инструменты могут перемещаться, поворачиваться и вращаться в гораздо большем диапазоне и гораздо точнее, чем человеческая рука. В зависимости от типа операции используется соответствующий инструмент, который позволяет ее выполнить наиболее эффективно. Миниатюрный роботохирургический инструмент производит рассечение тканей, перемещение тканей, зажим, наложение швов и прочее, что позволяет работать с труднодоступными участками органов без риска повреждения здоровых тканей.
В настоящей заявке под признаком «исполнительные поверхности инструмента», «исполнительная часть инструмента» понимают поверхности инструмента или часть инструмента, с помощью которых инструмент выполняет свое служебное назначение. Как правило, исполнительные поверхности, например, бранши, расположены на конце вводимого в тело пациента инструмента и совершают сложные движения, инициируемые и контролируемые хирургом.
Под термином «универсальный» в части его использования относительно контроллера в данном документе поднимают контроллер, который «оцифровывает» - переводит в числовые значение/координаты положение перемещаемой руку оператора и позволяет интегрировать в комплекс новый инструмент и управлять им, без последующих изменений конструкции контроллера. Освоив контроллер один раз, оператор использует его на протяжении длительного периода своей практики, благодаря свойству контроллера интегрироваться ("представлять" руку хирурга) в различных, в том числе удаленных мехатронных устройствах.
Пот термином «абсолютное положение» в данной документе понимают координату, определенную относительно неподвижного элемента конструкции.
Под термином «датчик поворота» в данном документе понимают устройство, предназначенное для преобразования угла поворота вращающегося объекта в электрические или аналоговые сигналы, позволяющие определить угол его поворота. Для определения значения угла поворота того или иного элемента в принципе подходят все виды угловых датчиков. Однако, в большинстве используемых датчиков требуется, прежде всего, постоянная регистрация и сохранение текущих данных о повороте элемента. Датчики поворота могут быть использованы на основе инкрементальных и абсолютных энкодеров. Датчики имеют цифровые выходные сигналы Linedriver (TTL, RS422), Push-Pull (HTL), SSI, CAN, Profibus, Profinet и другие. Также могут быть использованы датчики на основе аналоговых датчиков угла поворота и/или магнитных датчиков угла поворота.
Термин «соединенный» означает функционально соединенный, при этом может быть использовано любое количество или комбинация промежуточных элементов между соединяемыми компонентами (включая отсутствие промежуточных элементов).
Кроме того, термины «первый», «второй», «третий» и т.д. используются просто как условные маркеры, не накладывая каких-либо численных или иных ограничений на перечисляемые объекты.
Подробное описание изобретения
Описание примерных вариантов осуществления настоящего изобретения, приведенное ниже, приводится исключительно в качестве примера и предназначено для иллюстративных целей и не предназначено для ограничения объема раскрываемого изобретения.
Настоящее решение относится в целом к ассистирующему хирургическому комплексу, общая структура которого изображена на фиг. 1. Роботохирургический комплекс включает в себя три основных узла. Первым узлом являются контроллеры, служащие задающим устройством и с которыми непосредственно взаимодействует хирург. Вторым исполнительным узлом являются манипуляторы, на которых установлены медицинские инструменты. В зависимости от выполняемой процедуры имеется возможность смены медицинского инструмента на более подходящий. Третьим узлом роботохирургического комплекса является вычислительный блок, с помощью которого осуществляются все взаимодействия системы. Роботохирургический комплекс может быть использован при проведении различных хирургических вмешательств, в том числе в урологии, гинекологии, абдоминальной, нейро- и кардиохирургии.
Более подробно, роботохирургический комплекс 1000 состоит из трех взаимосвязанных основных узлов: тележка пациента (исполнительное устройство) 1300, система автоматического управления 1200 и консоль управления (задающее устройство) 1100, которая получает команды от хирурга 1130 для дальнейшего преобразования их в движение закрепленных в манипуляторе хирургических инструментов или для обеспечения генерации управляющих команд от хирурга для других блоков роботохирургического комплекса.
Также одним из узлов в роботохирургическом комплексе является система стереоизображения (система визуализации), которая включает камеру 1400 для получения изображения операционного поля 1330 и монитор системы визуализации 1140 для отображения полученного от камеры трехмерного изображения операционного поля. От качества получаемого хирургом изображения зависит эффективность проводимой операции. Современное развитие мехатронных систем и постоянное совершенствование роботохирургии предъявляет новые требования к разрабатываемым устройствам системы визуализации.
Консоль управления 1100 находится вне стерильной зоны хирургического блока и выполнена с возможностью управления: манипуляторами 1310, 1311, 1312 с закрепленными на них хирургическими инструментами; манипулятором 1320 с закрепленной на нем камерой 1400; непосредственно самими хирургическими инструментами. В управлении участвует контроллер 1110, управляемый руками хирурга, и педали 1120, управляемые ногами хирурга.
Обычно манипуляторы с хирургическими инструментами и камерой смонтированы на тележке пациента, которая предназначена для их поддержки и расположения относительно пациента. Следует понимать, что роботохирургический комплекс может иметь любое число манипуляторов, так, например, один или более манипуляторов. На фиг. 1 показаны три манипулятора 1310, 1320, 1330, выполненные с возможностью перемещения в трех плоскостях и вращения в трех плоскостях, а также манипулятор 1320 камеры 1400. Все манипуляторы, указанные на структурной схеме и являющиеся частью тележки пациента, обладают общими механическими характеристиками и конструкционным особенностями. Каждый манипулятор имеет корпус и соединительный узел манипулятора, к которому съемно может быть присоединен хирургический инструмент или камера, движение и положение которых имеет возможность изменять хирург, манипулируя/управляя с помощью контроллера управления, который оцифровывает движение рук хирурга.
Контроллер управления 1110 хирурга (контроллер оператора) позволяет управлять хирургическими инструментами и камерой, расположенных внутри пациента при проведении хирургической операции. Контроллер оператора 1110 преобразует механические движения руки хирурга на всей естественной амплитуде движений по шести степеням свободы для генерирования управляющих команд для роботохирургического комплекса.
Контроллер управления хирурга (контроллер оператора) 1110 формирует команду на перемещение хирургического инструмента. Дополнительно контроллер выполняет управление поворотами и открытием-закрытием бранша на хирургическом инструменте. Хирург 1130 имеет возможность генерировать по меньшей мере три поступательные и три вращательные степени свободы и дополнительно как минимум одну степень свободы при смыкании/размыкании браншей, что достаточно для управления хирургическим инструментом, выполняющим хирургическую операцию.
Под педалью 1120 в настоящей заявке понимают контактный коммутационный аппарат (механический или электронный), способный включать/выключать прохождения тока в цепи. В качестве такого аппарата может выступать педаль, кнопка, выключатель, переключатель и тому подобное. Здесь и далее в рамках данной настоящей заявки педалью 1120 является ножной педальный выключатель, который замыкает электрическую цепь при нажатии хирургом на педаль ногой. В составе консоли управления педалей может быть несколько. Педали предназначены для смены режимов работы контроллера управления, либо для переключения дополнительного функционала, например коагуляции, лазера и тому подобное. Ножные педальные выключатели позволяют хирургу управлять камерой, инструментами, электрохирургическими инструментами.
Система автоматического управления 1200 на основе полученных данных от контроллеров управления 1110 и сигнала с педалей 1120 генерирует управляющие команды, которые могут быть направлены как на манипуляторы 1310, 1311, 1312 с хирургическими инструментами, так и на манипулятор 1320, в котором закреплена камера. Нажатие и удерживание ножного выключателя 1120 отключает контроллеры управления 1110 от управления хирургическими инструментами (от управления манипуляторами 1310, 1311, 1312 с хирургическими инструментами) и включает и позволяет выполнить управление движением манипулятора 1320 с камерой 1400. В этом режиме оба контроллера 1110, правый и левый, работают одновременно. Когда педаль 1120 будет отпущена, контроллеры управления 1110 опять будут управлять хирургическими инструментами. В этом случае система автоматического управления 1200 получает от контроллера управления 1110 данные о трех поступательных и трех вращательных степенях свободы и генерирует на их основе три поступательных и три вращательных перемещения манипулятора с хирургическим инструментом.
Поскольку хирург может управлять движением и ориентацией хирургических инструментов, не держа фактически хирургические инструменты непосредственно в руках, то он (хирург) может эксплуатировать комплекс как в сидячем, так и стоячем положении. В качестве приспособления для сидячего положения комплекс может быть обеспечен креслом.
Предпочтительный вариант выполнения ассистирующего хирургического комплекса 2000 согласно настоящему изобретению изображен на фиг. 2. Комплекс состоит из следующих основных компонентов:
2110 - Контроллер управления хирурга (контроллер оператора), используемый в комплексе согласно настоящему изобретению, который получает команды от хирурга, преобразует их в движение хирургического инструмента внутри тела пациента во время проведения хирургической операции и/или обеспечивает все управляющие команды от хирурга комплектующим роботохирургического комплекса.
2150 - Цифровой блок управления контроллером оператора.
2200 - Система автоматического управления, выполненная в виде системы числового программного управления (ЧПУ) ассистирующего хирургического комплекса, и обеспечивающая числовое управление всем комплексом и отдельными блоками, такими как система наблюдения за операционным полем, хирургический инструмент, вспомогательное технологическое оборудование, операционный стол, оборудование.
2310 – Манипулятор хирургического инструмента, используемый в комплексе согласно настоящему изобретению.
2340 – Система позиционирования манипулятора относительно оперируемого.
2320 – Манипулятор камеры, которая позволяет получить изображение операционного поля во время проведения хирургической операции.
При этом контроллер управления (контроллер оператора) 2110 взаимодействует с механическим манипулятором 2320, входящим в состав роботохирургического комплекса, с закрепленной на нем камерой, таким образом, чтобы уменьшить или убрать совсем количество совершаемых хирургом компенсационных движений при управлении камерой, тем самым обеспечив сокращение продолжительности операции, уменьшение рисков ошибок хирурга, а также сокращение утомляемости хирурга на основе максимально интуитивного понятного порядка управления камерой.
Также в контуре силовой обратной связи настоящего роботохирургического комплекса интегрирована система оценки сил воздействия на ткани и органы пациента инструментом в процессе роботохиругической операции. Использование такой системы позволяет реализовать тактильные ощущения для хирурга от контакта поверхностей инструмента с тканями пациента, не создавая ощущений от контакта инструмента с троакаром, которые вынужденно возникают в виде трения и различных боковых сил при перемещении инструмента в троакаре во время работы.
Ниже представлено подробное описание конструкции усовершенствованных блоков, которые являются составляющими элементами ассистирующего хирургического комплекса, а также их информационных связей между собой.
Контроллер оператора 3000 (фиг. 3) относится к классу механизмов, обеспечивающих преобразование в электронный цифровой сигнал команд, которые человек задает движением руки. Общий вид контроллера оператора изображен на фиг. 3. Контроллер оператора 3000 в целом состоит из управляющей ручки 3100, блока-платформы позиционирования 3200 и цифрового блока управления (не показан на чертеже).
Указанный контроллер 3000 имеет контур прямой связи для того, чтобы задавать команды от оператора (хирурга) через движение его руки мехатронному устройству, и контур обратной связи для передачи в обратном порядке на руку оператора ответных команд-реакций от мехатронного устройства. Контур обратной связи контроллера 3000 предназначен для передачи на руку тактильных ощущений.
Контакт контроллера 3000 с рукой реализуется на управляющей ручке 3100. Управляющая ручка 3100 в целом состоит из контроллера кисти 3110 и контроллера запястья 3120, каждый из которых обеспечивает две вращательные степени свободы контроллера 3000.
Блок-платформа позиционирования контроллера 3200 представляет собой контроллер руки, обеспечивающий три поступательные степени свободы контроллера 3000 путем возвратно-поступательного движения механизма контроллера 3000 по трем взаимно ортогональным осям. При этом на контроллере руки 3200 закреплен контроллер запястья 3120, входящий в состав управляющей ручки контроллера 3100. Таким образом, контроллер оператора 3000 контролирует и преобразует в цифровой сигнал движения руки по шести степеням свободы.
На фиг. 4 изображен перспективный вид контроллера управления мехатронными устройствами, позволяющий считывать шесть степеней свободы и состоящий из контроллера руки, контролера запястья и контроллера кисти.
Контроллер руки (или блок-платформа позиционирования) 3200 состоит из по меньшей мере двух платформ - неподвижной опорной и подвижной - и блока позиционирования. К неподвижной опорной платформе прикреплена подвижная платформа посредством механизма компенсации веса, включающего блок позиционирования, выполненный на принципах параллельной структуры, предпочтительно, на основе механизма типа «дельта» (дельта-робота или дельтапода), и приводного механизма, который приводит в движение дельта-робот, обеспечивая при этом минимальный люфт.
Механизм параллельной структуры может быть использован любой. В предпочтительном варианте осуществления контроллера блок позиционирования представляет собой замкнутую кинематическую цепь, состоящую из штанг постоянной длины, расположенных попарно параллельно и соединенных одними концами с соответствующими приводами, закрепленными на неподвижной опорной платформе, а другими концами - с подвижной платформой. Дельта-механизмы обладают повышенной маневренностью и расширенной границей рабочей зоны.
Более того, контроллер на основе механизма параллельной структуры в сравнении с контроллерами последовательной структуры и иными контроллерами имеет значительно меньший вес и размер при одновременно большей точности, жесткости и мощности.
Дельта-робот (фиг. 5) представляет собой вид параллельного робота, который состоит из трех рычагов 410, расположенных под углом 120є относительно друг друга и прикрепленных к опорной платформе 420. Преимуществом конструкции дельта-робота является использование параллелограммов 440, содержащих штанги постоянной длины, расположенные попарно параллельно и соединенные между собой с помощью карданных шарниров 450. Параллелограммы 440 одним концом соединены за соответствующие рычаги 410, а вторым концом связаны с подвижной платформой 430. Такая конструкция позволяет сохранять пространственную ориентацию механизмов робота. При этом подвижная платформа 430 всегда расположена параллельно опорной платформе 420.
Соединение рычагов 410 с опорной платформой 420 производится через верхние подшипниковые узлы 460, чтобы обеспечить необходимые углы для исходного состояния дельта-робота. Верхние подшипниковые узлы 460 закреплены на опорной платформе 420. Установленные на верхние подшипниковые узлы 460 рычаги 410 на центрах соединения образуют равносторонний треугольник, углы которого влияют на размер полезной рабочей области дельта-робота. За перемещения по оси Z отвечает рычаги 410. Увеличивая длину рычага 410, увеличивается ход по оси Z. Размеры при перемещении по осям X и Y задаются параллелограммами 440.
Приводной механизм контроллера, который приводит в движение блок позиционирования контроллера, в частности, рычаги 410, может быть выполнен в виде любого известного механизма, обеспечивающего сокращение потерь точности из-за люфтов при работе механизма. В предпочтительном варианте осуществления контроллера приводной механизм может быть выполнен как кривошипно-шатунный механизм. Он приводится в движение с помощью шарико-винтовой передачи, исполняющей вращательные движения за счет сервопривода с встроенным электромагнитным тормозом и датчиком положения углов. Сервопривод - электромеханическое устройство, которое осуществляет динамические движения с постоянным контролем угла поворота вала, а также предоставляет возможность управления угловыми скоростями в различных исполнительных устройствах. В зависимости от получаемого на управляемый вход сервопривода значения управляющего параметра в результате сравнения данного параметра со значением датчика положения углов (энкодера) или с математической моделью (алгоритм вычислений вшит в памяти частотного преобразователя) изменяются параметры работы электропривода и осуществляется некоторое корректирующее действие для сервомотора (или серия действий), например поворот вала, ускорение или замедление, так, чтобы значение с датчика положения стало как можно ближе к значению внешнего управляющего параметра. Используемый тип сервопривода может быть любым. В некоторых вариантах осуществления контроллера используется интегрированный сервопривод.
В некоторых вариантах осуществления контроллера в качестве приводного механизма может быть использован любой известный безлюфтовой редуктор с нулевым механическим люфтом, например, безлюфтовый прецизионный редуктор, предпочтительно волнового типа или планетарный редуктор с угловым люфтом менее 6’.
В предпочтительном варианте осуществления приводной механизм включает сервопривод 510 с шарико-винтовой передачей и кривошипно-шатунным механизмом. В зависимости от шага шарико-винтовой передачи и радиуса кривошипа можно увеличить или уменьшить передаточное число приводного механизма.
На цилиндрических направляющих 570 между подвижной платформой 430 и направляющей платформой (не показана на чертеже) установлена и закреплена тензоплатформа 610, которая выполнена с возможностью получения цифровой информации в трехмерном пространстве о прикладываемой силе, векторе приложения силы и ускорении приложения силы, передаваемой на кисть от предплечья и иных, вышерасположенных частей руки оператора во время управления мехатронным комплексом. На тензоплатформе 610 установлены тензометрические датчики (тензодатчики) 600 для точного и эффективного определения прикладываемых сил со стороны оператора, которые крепятся к тензоплатформе через подшипниковые узлы 620. Тензодатчики 600 преобразуют величину деформации в электрический сигнал.
Тензодатчик 600 с одной стороны своим подвижным концом соединен с корпусом опорного подшипника 620, а с другой стороны другим концом соединен с тензоплатформой 610 через подшипниковый узел тензоплатформы 660. Тензодатчики 600 расположены на тензоплатформе 610 и сопряжены с каждой шарико-винтовой передачей, а именно, с валом шарико-винтовой передачи, через опорные подшипниковые узлы 620.
При возникновении усилий со стороны оператора механическая сила, прикладываемая оператором и передаваемая от предплечья на кисть оператора, проходит через подвижную платформу 430 контроллера руки по штангам параллелограммов 440 равной длины, расположенным попарно параллельно и соединенными одними концами за приводной кривошипно-шатунный механизм. Кривошипно-шатунный механизм, в свою очередь, соединен с шарико-винтовой передачей. В частности, рычаг 410 соединен с верхним подшипниковым узлом 460 и через шатун с нижним подшипниковым узлом. Таким образом, вращательные движения рычага 410 переводятся в поступательные движения направляющей платформы, на которой установлены нижние подшипниковые узлы и гайка шарико-винтовой передачи. Поступательные движения от гайки передаются во вращательные движения вала шарико-винтовой передачи, который воздействует на опорный подшипниковый узел 620. Следовательно, через шарико-винтовую передачу кривошипно-шатунный механизм действует на опорно-подшипниковый узел 620. Установленный тензодатчик 600 на тензоплатформе 610 своим подвижным концом соединен с корпусом опорного подшипника 620. Тензодатчик 600 преобразует величину деформации в электрический сигнал и передает его через свои выходы на цифровой блок управления контроллером (не показан на чертеже).
Цифровой блок управления контроллером, в свою очередь, на основании полученного сигнала по заданной программе рассчитывает траекторию перемещения дельта-робота по трем линейным координатам и при помощи сервоприводов перемещает блок позиционирования в требуемую позицию. Например, цифровой блок управления может быть выполнен с возможностью сравнения получаемого значения сигнала о деформации, а, следовательно, о перемещении, с заранее заданным значением, которое определяет положение дельта-робота в равновесии и подачи такого управляющего сигнала на сервопривод, чтобы значение с датчика положения углов стало как можно ближе к значению внешнего управляющего параметра. Такой механизм позволяет реализовать механизм регулируемого противодействия естественному опусканию дельта-робота под воздействием силы тяжести подвижных частей контроллера - систему «виртуального веса» (СВВ). СВВ позволяет регулировать вес, ощущаемый человеком на управляющей ручке контроллера в диапазоне от фактического (100%) до 0% - «нулевая плавучесть».
Система «виртуального веса» мультиплицирует величину усилия, прикладываемую рукой оператора к управляющей ручке контроллера, что позволяет индивидуально подбирать и всегда обеспечивать комфортное и постоянное для человека усилие при воздействии на контроллер, независимо от размера и веса составляющих контроллер деталей.
Цифровой блок управления контроллером сконфигурирован и построен таким образом, что позволяет сосредоточить максимум усилий на алгоритмах управления высокого уровня, освобождая пользователя от необходимости разработки и отладки устройств и приложений для управления отдельными сервоприводами. Цифровой блок управления контроллером имеет возможность записи всех управляющих команд и передачи их на систему числового программного управления (ЧПУ) ассистирующего хирургического комплекса, которая может быть выполнена на основе ЭВМ.
Таким образом, конфигурация контроллера руки позволяет перемещать его рукой оператора по трем линейных координатам, не затрачивая значительных сил руки оператора, компенсируя недостающую силу работой исполнительных двигателей, управляемых сигналами от цифрового блока управления контроллера для получения точных координат положения кисти от перемещения предплечья и иных, вышерасположенных, частей руки оператора-хирурга по как минимум трем степеням свободы, и компенсации веса контроллера руки в статике или при движении.
Контроллер запястья 3120 прикрепляется к подвижной платформе контроллера кисти (фиг. 4). Главным предназначением контроллера запястья 3120 является реализация контакта и взаимодействия с запястьем оператора и обеспечение по меньшей мере двух вращательных степеней свободы, как для реализации ориентации элемента мехатронного комплекса в ответ на поворот запястья оператора, так и для передачи усилий на запястье оператора при симуляции того или иного действия для обучения оператора.
Контроллер запястья 3120 выполнен с возможностью наиболее точно на всей амплитуде определять угол поворота запястья в двух ортогональных направлениях относительно заданного центра вращения (относительно места крепления контроллера запястья к контроллеру руки) для получения цифровой информации о поворотах в запястье руки оператора во время управления мехатронным комплексом. Конструкция контроллера запястья ограничена и задана физиологическим углом возможного поворота запястьем кисти в этих плоскостях.
Контроллер запястья 3120 имеет в составе по меньшей мере два блока: блок механизма поворота и блок подвижной консоли, каждый из которых обеспечивают две степени свободы запястья, и по меньшей мере один блок управления контроллера запястья.
Блок механизма поворота закреплен на контроллере кисти 3110 таким образом, чтобы иметь возможность вращения относительно продольной оси контроллера кисти, обеспечивая при этом одну степень свободы контроллера кисти. Структура блока подвижной консоли обеспечивает одну степень свободы относительно блока механизма поворота.
Использование по меньшей мере одного датчика определения угла поворота для каждой вращательной степени свободы позволяет определять абсолютное положение угла наклона контроллера запястья. В некоторых вариантах осуществления в дополнение к датчикам поворота для определения абсолютного положения того или иного элемента, входящих в состав контроллера, указанные элементы могут быть оснащены тахометрами, измерителями ускорения и нагрузочными элементами индикации силы, каждый из которых может обеспечивать электрические сигналы, относящиеся к скорости, ускорению и силе, прилагаемым к соответствующему элементу.
Для считывания данных с датчиков определения угла поворота и осуществления поворота блока подвижной консоли и/или блока механизма поворота контроллер кисти включает приводные элементы.
Для определения координат кистевого аппарата хирурга в составе контроллера оператора 3000 управления мехатронным комплексом используют контроллер кисти 3110. Контроллер кисти 3110 предназначен для контакта и взаимодействия с кистью хирурга и наиболее точно, на всей амплитуде движения руки и при всех углах движения рук, контролирует как минимум один угол поворота кисти руки и перемещение, взаимоположение друг относительно друга как минимум двух пальцев, преобразуя эту информацию в цифровой сигнал.
Дополнительно контроллер кисти 3110 обеспечивает минимальную нагрузку веса на кисть оператора при управлении, имеет и реализует канал обратной связи от элемента роботизированного технологического комплекса или системы управления в целом.
Контроллер кисти 3110 характеризуется тем, что содержит рукоятку с пальцевыми схватами. Рукоятка имеет корпус, охватываемый и удерживаемый оператором во время работы. Пальцевые схваты выполнены с возможностью расположения на них пальцев оператора во время работы. Контроллер кисти включает датчики поворота пальцевых схватов для определения абсолютного положения пальцевых схватов относительно оси вращения пальцевых схватов и датчик поворота рукоятки для определения абсолютного положения рукоятки относительно ее продольной оси, приводные элементы рукоятки и пальцевых схватов, блок управления контроллером запястья.
При возникновении усилий со стороны оператора контроллер кисти 3110 контролирует и оцифровывает отклонение кисти оператора, а также положение (приближение/смыкание/удаление) как минимум двух пальцев, охватывающих вместе с кистью оператора рукоятку контроллера кисти в области пальцевых схватов.
При повороте рукоятки кистью руки оператора датчик поворота рукоятки формирует цифровой сигнал об угле поворота и передает его в блок управления контроллера кисти, который рассчитывает угол отклонения рукоятки относительно ее продольной оси и передает эту информацию в цифровой блок управления контроллером, который выполнен с возможностью передачи полученных сигналов на систему числового программного управления (ЧПУ) ассистирующего хирургического комплекса, которая может быть выполнена на основе ЭВМ.
Пальцевые схваты работают в сочетании. В одном из вариантов осуществления один пальцевой схват выполнен за одно целое с корпусом рукоятки и неподвижен относительно него. Другой пальцевой схват подвижен и имеет один поворот, вращаясь вокруг своей оси, совпадающей с продольной осью рукоятки. Во время работы датчик поворота пальцевых схватов считывает угол поворота подвижного пальцевого схвата вокруг своей оси вращения и передает цифровой сигнал в блок управления контроллера кисти, который рассчитывает его положение относительно неподвижного пальцевого схвата и передает эту информацию на цифровой контроллер, который выполнен с возможностью передачи полученных сигналов на систему числового программного управления (ЧПУ) ассистирующего хирургического комплекса, которая может быть выполнена на основе ЭВМ.
При возникновении усилий со стороны оператора контроллер запястья контролирует и оцифровывает отклонение запястья относительно переднезадней оси, находящейся в сагиттальной плоскости (отведение или приведение кисти, которое также иногда называется лучевой девиацией кисти), а также поворот запястья вокруг заранее заданного центра, повторяющий поворот лучевой кости вместе с кистью вокруг локтевой кости относительно продольной оси руки оператора.
При отклонении блока подвижной консоли запястьем руки оператора от переднезадней оси, лежащей в сагиттальной плоскости, датчик поворота блока подвижной консоли формирует цифровой сигнал об угле поворота и передает его в блок управления контроллера запястья, который рассчитывает угол отклонения консоли и передает эту информацию в цифровой блок управления контроллером, который выполнен с возможностью передачи полученных сигналов на систему числового программного управления (ЧПУ) ассистирующего хирургического комплекса, которая может быть выполнена на основе ЭВМ.
При повороте блока механизма поворота вокруг заранее заданного центра запястьем руки оператора датчик поворота блока механизма поворота формирует цифровой сигнал об угле поворота и передает его в блок управления контроллера запястья, который рассчитывает угол отклонения блока относительно продольной оси руки оператора и передает эту информацию в цифровой блок управления контроллером, который выполнен с возможностью передачи полученных сигналов на систему числового программного управления (ЧПУ) ассистирующего хирургического комплекса, которая может быть выполнена на основе ЭВМ.
Цифровой блок управления контроллером на основе полученных данных планирует траекторию поворота рукоятки и/или пальцевых схватов и/или блока механизма поворота и/или блока подвижной консоли и при помощи подачи управляющего сигнала, подаваемого на приводной элемент рукоятки и/или приводной элемент пальцевых схватов и/или приводной элемент блока механизма поворота и/или блока подвижной консоли, перемещает рукоятку и/или пальцевые схваты и/или блок механизма поворота и/или блок подвижной консоли и непосредственно саму кисть и/или запястье оператора в требуемую позицию.
Блоки управления контроллера кисти и/или управления контроллера запястья, тензоплатформа, цифровой блок управления контроллером могут быть сопряжены с цифровым блоком управления контроллером посредством общей шины передачи данных. Цифровой блок управления контроллером выполнен с возможностью записи данных о получаемых/передаваемых командах. Цифровой блок управления контроллером в свою очередь через общую шину передачи данных сопряжен с системой ЧПУ ассистирующего хирургического комплекса.
Таким образом, цифровой блок управления контроллером имеет возможность повторить/продемонстрировать перемещения записанных команд как в свободном режиме, так и передавая движения на находящуюся на рукоятке контроллера руке оператора.
Средства передачи данных выбираются из устройств, предназначенных для реализации процесса коммуникации между различными устройствами посредством проводной и/или беспроводной связи, в частности, такими устройствами могут быть: GSM модем, Wi–Fi приемопередатчик, Bluetooth или BLE модуль, GPRS модуль, Глонасс модуль, NFS, Ethernet и т.п.
Контроллер оператора служит для управления манипулятора с хирургическими инструментами или камерой. Поэтому любое движение кисти или запястья или руки хирурга приводит к движения манипуляторов или хирургических инструментов. Управляющие сигналы с цифрового блока управления контроллером поступают в систему ЧПУ ассистирующего хирургического комплекса, в цифровой блок управления системой позиционирования манипуляторами и непосредственно в приводные элементы, блоки приводов манипуляторов для приведения их в движение.
Комбинированный манипулятор 4000 (фиг 6), используемый в ассистирующем хирургическом комплексе, представляет собой двухкомпонентный пространственный механизм, а точнее усовершенствованную конструкцию трипода в сочетании с портальным механизмом его линейных перемещений над рабочей областью. Такая гибридная кинематическая схема позволяет создать манипулятор, обладающий необходимой подвижностью и углом поворота выходного звена, на котором в итоге устанавливается хирургический инструмент.
В общем случае комбинированный манипулятор 4000 включает механизм 4100, снабженный приводными элементами 4200 (механизм типа «трипод» или трипод) и портальный механизм для обеспечения перемещения механизма 4100 вдоль двух линейных осей, снабженный блоками приводов 4400. При этом приводные элементы 4200 и блоки приводов 4400 выполнены с возможностью передачи данных системе управления роботохирургическим комплексом (системе ЧПУ ассистирующего хирургического комплекса) при перемещении элементов или получения управляющих сигналов от системы управления роботохирургическим комплексом (от системы ЧПУ ассистирующего хирургического комплекса) для перемещения выходного звена манипулятора в требуемую позицию согласно расчетным данным.
Трипод 4100 состоит из двух платформ: неподвижной опорной платформы (основания) 4110 и подвижной платформы 4120, которые соединены между собой посредством трех штанг 4130 постоянной длины.
Три штанги 4130 соединены одними концами через подшипниковой узел с соответствующими приводными элементами 4200, а другими концами штанги 4130 соединены через шарниры с подвижной платформой 4120. Штанги 4130 представляют собой универсальные валы, а шарниры в предпочтительном варианте изобретения являются карданными шарнирами (шарнирами Гука), которые обеспечивают две степени свободы в точке крепления (две вращательные степени свободы).
Механизм 4100 типа «трипод» приводится в движение приводными элементами 4200. Управляя взаимосвязанно тремя приводными элементами 4200 по определенному закону, возможно осуществлять перемещения подвижной платформы 4120 трипода манипулятора в пространстве (два поворота и одно линейное перемещение). Подвижная платформа 4120 трипода является его конечным звеном, следовательно, является выходным звеном трипода.
В некоторых вариантах осуществления манипулятора приводной элемент 4200 может быть выполнен в виде любого известного механизма, обеспечивающего сокращение потерь точности из-за люфтов. Например, в качестве приводного элемента 4200 может быть использован любой известный сервопривод совместно с безлюфтовым редуктором с нулевым механическим люфтом, например, с безлюфтовым прецизионным редуктором предпочтительно волнового типа или с планетарным редуктором с угловым люфтом менее 6’.
В предпочтительном варианте осуществления приводной элемент 4200 включает динамичный и точный синхронный сервопривод с шарико-винтовой передачей. В зависимости от шага шарико-винтовой передачи можно увеличить или уменьшить передаточное число приводного элемента.
Конструкция портального механизма обеспечивает дополнительно два линейных перемещения для трипода 4100 в пространстве - продольное и поперечное. Портальный механизм состоит из модуля поперечного перемещения, по которому в поперечном направлении перемещается трипод 4100, и модуля продольного перемещения, по которому в продольном направлении перемещается модуль поперечного перемещения. Конструкции модулей расположены в параллельных плоскостях. Каждый из модулей выполнен в виде прямоугольной рамы.
Блок приводов 4400 портального механизма может быть выполнен в виде любого известного механизма, обеспечивающего сокращение потерь точности из-за люфтов при работе.
В предпочтительном варианте осуществления манипулятора каждая из осей линейного перемещения портального механизма приводится в движение точным синхронным сервоприводом 4410 совместно с ременной передачей. Сервопривод 4410 работает в паре с прецизионным планетарным редуктором 4411. Он необходим для повышения момента двигателя и большей грузоподъемности конструкции. В качестве редуктора 4411 может быть использован любой известный редуктор с нулевым механическим люфтом. В качестве ременной передачи используется полиуретановый зубчатый ремень в паре с зубчатыми шкивами 4412. Данные приводные ремни не растягиваются благодаря запрессованному корду, и таким образом не подвержены остаточной деформации. Удлинение, вызываемое периферийными силами и предварительным натяжением, чрезвычайно мало. Такое решение подходит для передач высокой мощности и обеспечения необходимой точности.
В результате получается манипулятор, как сочетание кинематического решения в виде механизма трипода 4100 и портального механизма его линейных перемещений. Трипод обладает двумя вращательными и одной поступательной степенью свободы. Поступательное движение (ось Z) обеспечивается благодаря синхронной работе трех серводвигателей в одном направлении. Механизм линейных перемещений трипода обеспечивает дополнительные две степени свободы (по осям X, Y).
Таким образом, разработанный манипулятор позволяет наиболее точно, при максимально необходимых углах поворота, при минимальном весе и размере конструкции, обеспечить перемещение выходного звена (подвижной платформы трипода) вокруг удаленного центра движения - точки «0».
На выходное звено комбинированного манипулятора устанавливают хирургический инструмент 4500 (фиг. 7), например, выполненный в виде концевого эффектора 4510 с браншами и приводом 4550 для управления концевым эффектором хирургического инструмента. Привод 4550 закреплен на платформе хирургического инструмента (не показана не чертеже), для передвижения которой по одной линейной оси предусмотрен отдельный приводной элемент 4600.
Приводной элемент 4600 может быть выполнен в виде любого известного механизма, обеспечивающего сокращение потерь точности из-за люфтов при работе. В предпочтительном варианте осуществления манипулятора платформа хирургического инструмента совместно с хирургическим инструментом приводится в движение линейно точным синхронным сервоприводом 4610 совместно с ременной передачей. Он обеспечивает дополнительный ход по оси Z хирургическому инструменту 4500 в те моменты, когда движение по этой оси благодаря одновременной работе серводвигателей 4210 трипода 4100 будет недостаточным, нежелательным или невозможным.
Для осуществления описанного выше линейного перемещения хирургического инструмента 4500 вдоль оси Z к подвижной платформе 4120 трипода жестко присоединяют площадку 4620 с установленной на ней линейной направляющей 4630, по которой с помощью сервопривода 4610 перемещается каретка (не показана на чертеже) с закрепленной на ней платформой хирургического инструмента 4500.
Такая кинематическая схема позволяет обеспечить ввод инструмента в тело пациента в точке «0» (точка входа хирургического инструмента в тело пациента) и с помощью разработанного математического аппарата системы управления обеспечить движение всего механизма вокруг этой точки.
При возникновении необходимости движения манипулятора хирург перемещает «ручку» управляющего контроллера оператора. Формируется цифровой сигнал и передается в цифровой блок управления контроллером, а далее в систему ЧПУ ассистирующего хирургического комплекса. Система ЧПУ обеспечивает преобразование координат всех элементов контроллера оператора в координаты исполнительного устройства (манипулятора). Она осуществляет формирование сигналов управления приводами по каждой степени подвижности исполнительного устройства таким образом, чтобы то или иное его движение соответствовало направлению, в котором оператор-хирург воздействовал на механизм управляющего контроллера, и оно было для него интуитивно понятно. Возможные движения комбинированного манипулятора приведены на фиг.8.
Блоки приводов (приводные элементы) манипулятора и хирургического инструмента связаны с системой ЧПУ. Они сопряжены посредством общей шины передачи данных. Система ЧПУ выполнена с возможностью записи данных о получаемых командах. Средства передачи данных выбираются из устройств, предназначенных для реализации процесса коммуникации между различными устройствами посредством проводной и/или беспроводной связи, в частности, такими устройствами могут быть: GSM модем, Wi-Fi приемопередатчик, Bluetooth или BLE модуль, GPRS модуль, NFS, Ethernet и т.п.
Система оценки сил.
Для измерения сил, воздействующих на хирургический инструмент в процессе проведения роботохирургической операции, и передачи информации, содержащей результаты измерений, в комплексе используется система оценки сил. Система является составной частью исполнительного механизма робот-ассистированного хирургического комплекса и реализует функционал измерения для реализации комплексом тактильной обратной связи. Система оценки сил, используемая в контуре силовой обратной связи, должна обладать следующими функциями:
• Измерение данных прикладываемых к инструменту сил с использованием нескольких многоосевых тензометрических датчиков;
• Первичная обработка данных о прикладываемых силах с обеспечением условия ограничения частотных характеристик сигналов с целью уменьшения измерительных шумов и подавления влияния электромагнитных наводок;
• Передача обработанных данных в режиме реального времени на вышестоящую систему управления с использованием проводного или беспроводного интерфейса связи.
На фиг. 9 приведено схематическое изображение конструкции крепления хирургического инструмента. Конструкция крепления представляет собой опору, сконфигурированную для расположения и закрепления на ней троакара и закрепления инструмента путем закрепления привода инструмента. Для точного позиционирования инструмента в конструкции крепления используется держатель троакара. На фиг. 9 цифрами обозначены следующие конструктивные элементы: 5100 – трехосевой тензометрический датчик (верхний тензометрический датчик); 5200 – трехосевой тензометрический датчик (нижний тензометрический датчик); 5300 – держатель троакара. Принятые обозначения на фиг. 9: О1 – точка ввода троакара в тело пациента, вокруг которой осуществляются два поворота введенного в троакар инструмента во время операции (нулевая точка), точка находится внутри троакара, А – положение конца хирургического инструмента, который вводится в тело пациента, В – положение противоположного конца хирургического инструмента, установленного в привод хирургического инструмента. Углы ориентации (углы вращения) хирургического инструмента в горизонтальной плоскости и наклона рассматриваются относительного точки вращения (нулевая точка). Нулевая точка O1 определяется как начало отсчета.
Механическое взаимодействие элементов инструмента, конструкции крепления хирургического инструмента и элементов манипулятора реализуется через два многоосевых тензометрических датчика, один из которых расположен на одном конце инструмента под приводом инструмента, а другой – в месте закрепления троакара. Расположение тензометрических датчиков представлено на фиг.9.
Такое расположение тензометрических датчиков обладает следующими преимуществами:
• Физическое отдаление чувствительных элементов датчиков от зоны помех электрокоагуляции;
• Предоставляет возможность использования различных инструментов без изменения их конструкции;
• Позволяет производить оценку сил по нескольким степеням свободы.
В качестве многоосевых тензометрических датчиков могут быть применены датчики изгиба на основе тензорезисторов, емкостные датчики деформации или датчики любого иного принципа действия, позволяющие произвести измерение приложенного к ним усилия.
В предпочтительном варианте осуществления изобретения в качестве тензометрических датчиков могут быть использованы датчики деформации с чувствительным элементом в виде тензорезистора. Датчики такого типа обладают высоким выходным сопротивлением, а сигнал имеет малую мощность, что ограничивает его распространение в пространстве.
Конструкция позволяет реализовать следующие возможности:
• Производить оценку сил, действующих на инструмент как минимум в пяти степенях свободы с использованием двух трехосевых тензометрических датчиков (три линейные степени свободы вдоль осей Х, Y, Z и вращательные моменты вокруг осей X и Y);
• Производить оценку усилия захвата (усилия сжатия), контролируя одну степень свободы (степень свободы при захвате, сжатии исполнительных поверхностей хирургического инструмента);
• Производить оценку вращательной/скручивающей силы, действующей на инструмент (три вращательные степени свободы вокруг осей Х, Y, Z);
• При оценке сил учитывать силы, возникающие в месте контакта троакара с телом пациента;
• Обеспечивать достаточную достоверность данных об усилиях в условиях электромагнитных помех, создаваемых электрокоагуляцией.
Во время работы исполнительные поверхности, расположенные на конце инструмента, введенного в тело пациента (исполнительная часть инструмента), совершают сложные движения, инициируемые и контролируемые хирургом. При возникновении сопротивления движению исполнительной части инструмента или при соприкосновении частей инструмента с тканью пациента возникает изгиб чувствительного элемента тензометрического датчика по соответствующей оси. Так как инструмент, располагаясь в конструкции крепления хирургического инструмента, контактирует с манипулятором в двух точках, одной из которых является зона расположения троакара, а другая – зона расположения привода хирургического инструмента, то выполняется измерение усилий в обоих точках и дальнейшая совместная обработка данных сигналов.
Выходы тензометрических датчиков подключены непосредственно к модулям цифровой обработки, которые производят усиление сигналов и их перевод в цифровую форму. Модули цифровой обработки могут быть расположены непосредственно возле тензометрических датчиков. Указанное расположение не является обязательным и может быть изменено при необходимости, например, при использовании тензометрических датчиков с платой усиления сигнала. Однако, расположение модуля цифровой обработки сигналов тензометрических датчиков в непосредственной близости к каждому используемому тензометрическому датчику является предпочтительным, так как обеспечивается высокое отношение сигнал-шум и устойчивость к внешним электромагнитным возмущениям.
Для измерения силы захвата/сжатия на исполнительных поверхностях хирургического инструмента, например, браншей, могут быть использованы датчики силы тока для двигателей, реализующих захват/сжатие. Принцип измерения усилия сжатия заключается в увеличении потребления тока двигателями при возникновении сопротивления движению захватывающих элементов конструкции инструмента. Двигатели, реализующие сжатие, являются частью привода хирургического инструмента.
Для измерения вращательного момента вокруг оси Z может быть применен датчик тока электродвигателя, обеспечивающего вращения вокруг данной оси. Принцип измерения вращательного момента заключается в увеличении потребляемого электродвигателем тока при возникновении сопротивления движению. Двигатели, реализующие вращение вокруг оси Z, являются частью привода хирургического инструмента.
В предпочтительном варианте осуществления изобретения в качестве двигателей используют электрические двигатели (электродвигатели). Каждый из датчиков тока двигателей привода хирургического инструмента может быть соединен с системой управления электродвигателем.
Модули цифровой обработки и системы управления электродвигателем соединены с модулем обработки за счет шины данных. Шина данных может представлять собой интерфейс RS485, CAN, Bluetooth или какой-либо другой проводной или беспроводной интерфейс передачи данных. Модуль обработки предназначен для групповой обработки и синхронизации сигналов от тензометрических датчиков, датчика вращательного момента и датчика усилия захвата. Использование отдельного устройства в качестве модуля обработки не является обязательным. Он может быть совмещен с каким-либо модулем цифровой обработки или с системой управления. Система управления (система ЧПУ ассистирующего хирургического комплекса) использует данные, полученные от модуля обработки для дальнейшей организации обратной связи и передачи сигналов хирургу. Архитектура системы оценки сил представлена на фиг. 10.
Данные с модуля обработки данных поступают на систему управления роботохирургическим комплексом (система ЧПУ ассистирующего хирургического комплекса) и передаются в цифровой блок управления контроллером хирурга.
Хирург удерживает в руках контроллер и, перемещая его, формирует цифровой сигнал, с помощью которого через систему управления роботохиругическим комплексом и манипулятор происходит управление инструментом. При соприкосновении инструмента с тканями пациента или троакаром возникают силы, воздействующие на инструмент. Система оценки сил определяет эти силы, преобразует информацию в цифровой сигнал, который через систему управления роботохирургическим комплексом в обратном порядке передается на контроллер хирурга. Контроллер хирурга устроен таким образом, что получает эти сигналы и преобразовывает их в механические движения контроллера по направлению, противоположному движениям руки хирурга, управляющей инструментом.
Возникающее сопротивление создает на руке ощущение, как если бы она касалась тканей. Интуитивно понятное и совпадающее с движениями руки перемещение инструмента, а также осязание касания инструментом тканей создает у хирурга ощущения, что он во время операции на роботохирургическом комплексе удерживает инструмент непосредственно в руке.
Система позиционирования манипуляторами.
Система позиционирования манипуляторами обеспечивает крепление манипуляторов к операционному столу и увеличивает количество возможных позиций манипулятора относительно пациента, и, кроме того, позволяет убирать манипуляторы из операционной зоны в кратчайшие сроки в автоматизированном или ручном режиме.
Крепежный механизм (см Фиг. 11) системы позиционирования манипуляторов к хирургическому столу, в целом, представляет собой два фартука 6007, каждый из которых имеет возможность крепиться к стороне хирургического стола съемным образом так, чтобы на противоположных сторонах стола было по одному фартуку 6007 (дальнейшее описание конструкции системы идет в отношении одного из фартуков, при этом конструкция второго фартука и его систем идентична).
В целом на одном фартуке 6007 можно установить по меньшей мере одну гитару 6006, а на ней по меньшей мере одну телескопическую вертикальную колонну 6008, на каждой из которых размещена своя рука позиционирования (механизм позиционирования) с закрепленным манипулятором (на чертеже не показан). На Фиг. 11 приведен пример с одной колонной 6008 и соответственно с одной рукой позиционирования. Подробное описание вышеуказанных элементов приведено ниже.
На фартуке 6007 вертикально относительно стола закреплены направляющие 6011, которые служат для вывода манипуляторов из зоны хранения в рабочую зону и вдоль которых вертикально перемещается горизонтальный элемент 6006, который в дальнейшем в материалах заявки будет называться «гитара» 6006.
Гитара 6006 с одной стороны прикрепляется к установочной платформе, а с другой стороны снабжена направляющими 6012. Установочная платформа 6022 соединена с соответствующими каретками, установленными на направляющих 6011 фартука 6007. Установочная платформа может перемещаться по направляющим 6011 фартука 6007 под воздействием привода любого типа (электрический, гидравлический, пневматический и др.). Привод на фиг. 11 не показан. Направляющие 6012 гитары 6006 установлены на протяжении всей длины гитары 6006.
На гитаре 6006 расположена по меньшей мере одна вертикальная колонна 6008, которая выполнена с возможностью горизонтального перемещения вдоль гитары 6006. Вертикальная колонна 6008 представляет собой телескопическую двухкомпонентную стойку. Причем компоненты стойки идентичны и симметричны. Компонент, ориентированный в сторону гитары 6006, является внутренней стороной вертикальной колонны 6008, а компонент, ориентированный в сторону от хирургического стола, является лицевой стороной вертикальной колонны. Каждая сторона снабжена направляющими, простирающимися вдоль всей длины вертикальной колонны 6008, и приводными механизмами в виде шарико-винтовой передачи 6013 с приводом 6009. На внутреннею сторону колонны 6008 установлены одни направляющие, а на лицевую сторону колонны 6008 установлены направляющие 6016.
Вертикальная колонна 6008 соединена с гитарой 6006 следующим образом. На направляющих 6012 гитары 6006 установлены каретки 6010. На каретках 6010 установлен соединительный модуль 6015, выполняющий функцию перемещения системы позиционирования вдоль хирургического стола. Соединительный модуль 6015 состоит из двух частей, которые между собой образуют надежное, жесткое быстросъемное соединение. Соединительный модуль 6015 с одной стороны крепится на каретки 6010, а с другой стороны соединительного модуля 6015 на него крепятся каретки 6014. Каретки 6014 входят в направляющие, которые в свою очередь установлены на внутренней стороне вертикальной колонны 6008. Вертикальная колонна 6008 перемещается по горизонтали за одно целое с соединительным модулем 6015 по направляющим 6012 гитары 6006 под воздействием приводного механизма, выполненного в виде привода 6009 и шарико-винтовой передачи (ШВП) 6013, расположенных на гитаре.
На вертикальной колонне 6008 закреплен посредством соединительного элемента 6004 механизм позиционирования на последовательной структуре, который состоит из двух консолей и поворотной площадки 6003 крепления и позиционирования манипулятора 6018 (см. Фиг.12). Соединительный элемент 6004 прикреплен через направляющие 6016 на лицевой стороне колонны 6008 таким образом, что образует кинематическую пару с механизмом позиционирования на последовательной структуре. При этом в сочленении элемента 6004 и консоли 6002 находятся несколько независимых приводов с датчиками положения, а в сочленении консоли 6002 и консоли 6005 также находятся несколько независимых приводов с датчиками положения. Перечисленные приводы образуют блок приводов 6017. В сочленении консоли 6005 и площадки 6003 также находится независимый привод с датчиками положения. Соединительный элемент 6004, благодаря кареткам, имеет возможность совершать вертикальные поступательные движения вдоль направляющих 6016 на лицевой стороне вертикальной колонны 6008, а сама колонна 6008 имеет возможность перемещаться вертикально вдоль соединительного модуля 6015 по направляющим. Движения могут выполняться совместно или попеременно.
Позиционирующий механизм манипулятора осуществляет перемещение в плоскости хирургического стола, поворачиваясь относительно соединительного элемента. Поворотные консоли 6002 и 6005 выполнены с возможностью поворота в горизонтальной плоскости таким образом, чтобы консоль 6002, находясь над поверхностью хирургического стола в рабочем положении, совершала полный оборот на 360 градусов и имела возможность ограниченного поворота под поверхностью стола в нерабочем состоянии. На указанной консоли 6005 установлен узел крепления и позиционирования 6003 манипулятора 6018 с хирургическим инструментом, выполненный с возможностью поворота вокруг своей оси для приведения манипулятора 6018 в рабочее положение (см. Фиг.12).
Приводные механизмы могут быть выполнены в виде любого известного механизма, обеспечивающего линейные перемещения и обеспечивающего сокращение потерь точности из-за люфтов. В предпочтительном варианте осуществления системы позиционирования манипуляторов за все описанные выше перемещения по направляющим отвечают шарико-винтовые передачи (ШВП) 6013, которые приводят в движения сервомоторы 6009, каждый из которых соединен со своей передачей.
В качестве блока приводов 6017 используется сервопривод в паре с любыми известными редукторами с нулевым механическим люфтом, например, безлюфтовые планетарные редукторы. Такие приводные механизмы, используемые на поворотных осях в конструкции механизма, обеспечивают высокую точность позиционирования манипуляторов.
Совокупность движений всего механизма обеспечивает необходимое перемещение системы позиционирования по вертикальной плоскости боковой поверхности хирургического стола и осуществляет возврат манипуляторов в зону хранения.
Преимущество такого исполнения состоит в обеспечении линейных движений по боковой поверхности хирургического стола, осуществлении необходимого для позиционирования манипулятора объёма движения и в создании конструкцией жесткого каркаса для достижения высокой точности. Такая компоновка линейных перемещений обеспечивает большой охват операционного поля, при этом имеет более компактный габаритный размер всего механизма позиционирования.
Система компенсации работы камеры.
В одном из манипуляторов ассистирующего хирургического комплекса закреплена камера для наблюдения за операционным полем в процессе хирургической операции. Изображение оперируемой области, транслируемое стереоскопической камерой, доступно хирургу на мониторе системы визуализации.
Камера широко определяется в данной заявке как любое устройство, структурно сконфигурированное с возможностью формирования стереоизображения, будучи введенной в тело пациента. Изображение операционного поля может быть получено оптически с помощью волоконной оптики, объективов и миниатюризированных систем формирования изображений, например, с помощью видеоэндоскопа (далее – эндоскоп).
Камера вводится в организм через отверстие в теле пациента. Точка/плоскость входа определяется как «нулевая точка», поскольку все перемещения инструмента или камеры в теле пациента обеспечиваются двумя вращательными степенями свободы относительно этой точки и одной линейной степенью свободы. В «нулевой точке» располагается троакар для дополнительной фиксации инструментов и камеры. Также существует «нулевая точка камеры» в локальной системе координат камеры, относительно которой изменяет свое положение вектор положения камеры с началом в «нулевой точке» и с концом, совпадающим с фактическим положением конца камеры. У камеры есть поле обзора, зависящее от характеристик объектива камеры. Камера передает изображение только той части операционного поля, которая попала в поле обзора.
Поле зрения камеры может иметь область, сконфигурированную для того, чтобы быть видимой камерой в любой момент времени.
Когда камера движется, область поля зрения перемещается вместе с камерой, что позволяет визуально обследовать операционную область. От особенностей перемещения камеры зависит и изменение области видимости. При этом хирургу должна быть гарантирована однозначность в понимании перемещения камеры и связанного с этим перемещения/изменения поля зрения в пределах операционного поля.
Система автоматического управления (система ЧПУ ассистирующего хирургического комплекса) выполнена с возможностью реализовывать компенсацию движения камеры, а именно реализовывать способ для управления перемещением камерного манипулятора, входящего в состав роботизированной хирургической системы для уменьшения количества перемещений стереокамеры, визуализирующей хирургическую область, в операционном поле.
Детальные шаги заявленного способа представлены ниже.
Локальная система координат, связанная с контроллером управления, содержит информацию о положении контроллера в виде трех поступательных декартовых координат  и трех вращательных координат
и трех вращательных координат  .
.
От правого контроллера хирурга (контроллера оператора) в систему автоматического управления передаются вектора  От левого контроллера хирурга в систему автоматического управления передаются вектора
От левого контроллера хирурга в систему автоматического управления передаются вектора 
При нажатии педали управления камерным манипулятором включается режим управления камерой, сигнал с педали передается не только в систему автоматического управления, но и в контроллеры, которые блокируют вращательные степени свободы, а вектора  обнуляются:
обнуляются:

Для управления камерным манипулятором достаточно трех поступательных степеней свободы, описываемых вектором  .
.
Полученные системой автоматического управления вектора обрабатываются с использованием алгоритма дифференцирования и объединения движения. Управление осуществляется при помощи относительного перемещения контроллера с момента начала управления камерой, инициализированного нажатием на педаль. Таким образом, увеличивается гибкость системы управления.

Управление камерой осуществляется обоими контроллерами одновременно. Таким образом, далее суммируется относительное перемещение каждого из контроллеров:

Полученный вектор  можно масштабировать, инвертировать, вращать вокруг ортогональных осей, составлять композиции поворотов. Любую из перечисленных математических операций можно осуществить при помощи векторного произведения.
можно масштабировать, инвертировать, вращать вокруг ортогональных осей, составлять композиции поворотов. Любую из перечисленных математических операций можно осуществить при помощи векторного произведения.
Далее осуществляют масштабирование. Масштабирование представляет собой векторное произведение  и строки
и строки  , содержащей коэффициенты масштабирования для каждой координаты.
, содержащей коэффициенты масштабирования для каждой координаты.

Операция масштабирования происходит в блоке масштабирования и интегрирования. Полученное на предыдущем этапе отмасштабированное приращение сигналов контроллеров хирурга прибавляется к текущему положению камерного манипулятора в его локальной декартовой системе координат.

Таким образом, в блок компенсации движения в плоскости поступает расчетное положение камерного манипулятора в локальной декартовой системе координат.
Для управления манипулятором необходимо перевести рассчитанные декартовы координаты в сферические. В связи с этим важны операции перевода векторов из одной системы координат в другую. Перевод из декартовой в сферическую систему координат осуществляется следующими алгебраическими преобразованиями:
Помимо алгоритма компенсации движения манипулятора в плоскости, необходимо также реализовать алгоритм сопоставления линии горизонта со средней линией кадра, заключающийся в вычислении величины угла расхождения между линией горизонта и средней линией кадра, зависящей от углов наклона  и
и  . Расхождение средней линии кадра с линией горизонта вычисляется в блоке компенсации горизонта согласно формуле:
. Расхождение средней линии кадра с линией горизонта вычисляется в блоке компенсации горизонта согласно формуле:
На заключительном этапе способа полученные данные одновременно передают на блок управления движениями манипулятора с закрепленной на нем камерой, для ее перемещения внутри пациента с целью отображения операционного поля. При этом манипулятор с камерой осуществляет как поступательные движения для компенсации движения камеры и контроллеров управления, так и поворот вокруг своей продольной оси для нивелирования линии горизонта и средней линии кадра получаемого с камеры изображения. Перечисленные выше этапы предлагаемого способа, осуществляемые с помощью автоматической системы управления камерным манипулятором, описаны согласно блок-схеме, представленной на фигуре 13.
Сначала получают данные о перемещении правого и левого контроллеров управления хирурга. На следующем этапе определяют, поступал ли сигнал с педали. В том случае, если на систему автоматического управления поступает сигнал с педали, переключающей контроллеры в режим управления камерой, инициируется сигнал о начале работы системы автоматического управления камерным манипулятором.
На следующем этапе актуальные данные, поступившие с контроллера, поступают последовательно в вычислительный блок производных для правого и левого контроллеров, по приращению которых находится суммарное перемещение.
На следующем этапе данное перемещение обязательно масштабируют с учетом отдаления эндоскопа от нулевой точки.
Далее происходит интегрирование полученного приращения с позицией манипулятора в его декартовой системе координат. Данная скомпенсированная плоскость движения переводится в сферические координаты манипулятора , , на основе которых на следующем этапе вычисляют величину компенсации линии горизонта
, на основе которых на следующем этапе вычисляют величину компенсации линии горизонта  . Полученный набор данных
. Полученный набор данных  ,
, передают на манипулятор камеры. После чего этапы повторяют.
передают на манипулятор камеры. После чего этапы повторяют.
Предложенный способ управления движением камеры добавляет интуитивно понятное взаимодействие с роботохирургическим комплексом и повышает эффективность проведения роботохирургической операции.
Пример осуществления ассистирующего хирургического комплекса.
Была проведена экспериментальная роботохирургическая операция на животном – нефрэктомия. Проводилась видеозапись рабочего места оператора-хирурга для отслеживания расположения рук на различных этапах операции для последующего анализа удобства управления и взаимодействия. Оптимальная посадка оператора-хирурга за управляющую консоль производилась таким образом, что исключается возможность расположения рук в анатомически неестественных позах, которые приводят к повышенной утомляемости.
Конструкция контроллера управления позволяет осуществлять перемещение и вращение по заданным осям, обеспечивая при этом максимальную амплитуду движения в рабочей области хирурга. Рабочая область не сковывает движения хирурга, конструктивные особенности позволяют при необходимости использовать все пространство, ограниченное по ширине размахом рук, по глубине - длиной рук, по высоте - расстоянием до колен.
Эргономически выгодные решения, такие как максимальное использование пространства над коленями хирурга и отсутствие выступающих элементов конструкции, предотвращающее возможные столкновения, гарантируют удобство управления, что является важным фактором при проведении длительных операций.
Реализованные шесть степеней свободы контроллера позволяют в полной мере реализовать минимально необходимые для проведения роботохирургической операции операционные действия – захват ткани, резекция, наложение швов. Взаимодействие хирурга с контроллером при проведении нефрэктомии на свинье приведено на фиг.14.
После проведения операционного вмешательства было выявлено, что:
• хирургу не приходилось прилагать дополнительных усилий для совершения хирургических воздействий;
• рабочее поле хирурга не было ограниченно конструкцией контроллера – все необходимые перемещения и вращения осуществлялись с максимальной амплитудой;
• эргономичность конструкции позволила снизить утомляемость и усталость по сравнению с аналогами при проведении длительных операций;
• предложенная конструкция контроллера повысила удобство управления роботохирургическим комплексом по сравнению с аналогами;
• более 50 % времени запястья хирурга находятся в положении, представленном на фиг.15.
Хотя настоящая патентная заявка относится к определенному в прилагаемой ниже в формуле изобретения, важно отметить, что настоящая заявка на патент содержит основание для формулировки других изобретений, которые могут, например, быть заявлены как объект уточненной формулы изобретения настоящей заявки или как объект формулы изобретения в выделенной и/или продолжающей заявке. Такой объект может быть охарактеризован любым признаком или комбинацией признаков, описанных в настоящем документе.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОНТРОЛЛЕР ОПЕРАТОРА ДЛЯ УПРАВЛЕНИЯ РОБОТОХИРУРГИЧЕСКИМ КОМПЛЕКСОМ | 2019 |
|
RU2718595C1 |
| КОНТРОЛЛЕР ЗАПЯСТЬЯ ДЛЯ ИСПОЛЬЗОВАНИЯ В КОНТРОЛЛЕРЕ ОПЕРАТОРА РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2718568C1 |
| КОНТРОЛЛЕР КИСТИ ДЛЯ ИСПОЛЬЗОВАНИЯ В КОНТРОЛЛЕРЕ ОПЕРАТОРА РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2716353C1 |
| СПОСОБ УПРАВЛЕНИЯ КАМЕРОЙ В РОБОТОХИРУРГИЧЕСКОМ КОМПЛЕКСЕ | 2020 |
|
RU2721461C1 |
| ОЦЕНКА УСИЛИЯ НА РОБОТОХИРУРГИЧЕСКОМ ИНСТРУМЕНТЕ | 2019 |
|
RU2721462C1 |
| Ведущий манипулятор роботохирургического комплекса | 2022 |
|
RU2803231C1 |
| СИСТЕМА ПОЗИЦИОНИРОВАНИЯ МАНИПУЛЯТОРА РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2720841C1 |
| КОМБИНИРОВАННЫЙ МАНИПУЛЯТОР РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2721485C1 |
| Устройство управления манипуляторами роботохирургического комплекса | 2020 |
|
RU2757969C1 |
| Манипулятор роботизированного хирургического комплекса | 2020 |
|
RU2754219C1 |

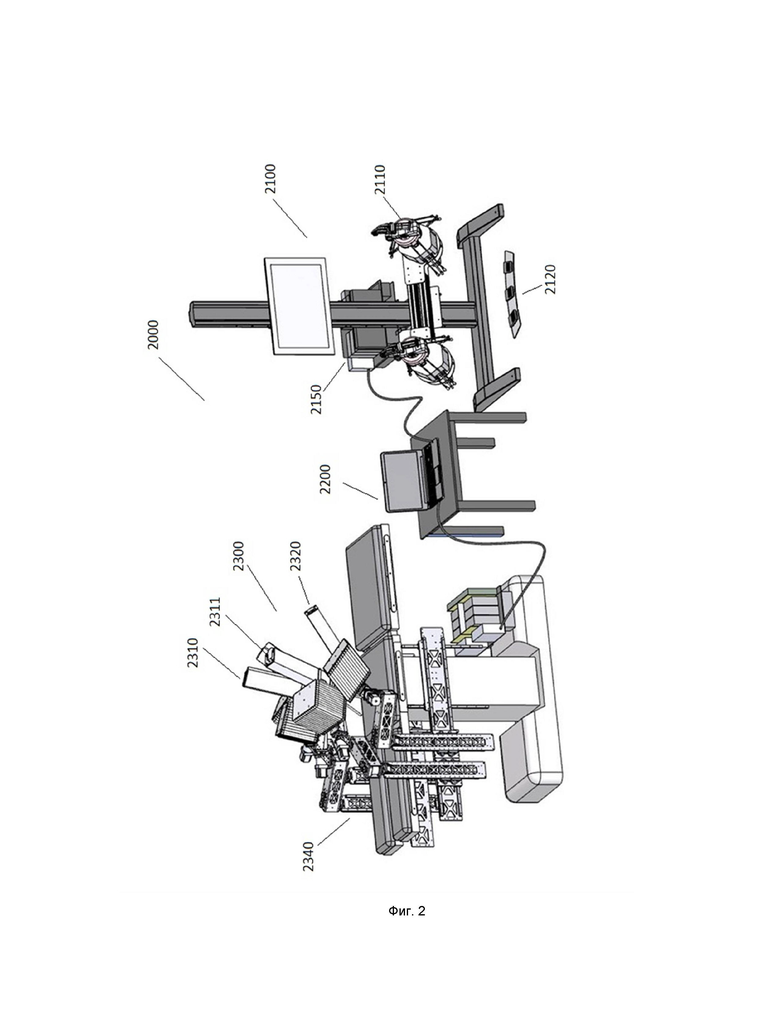

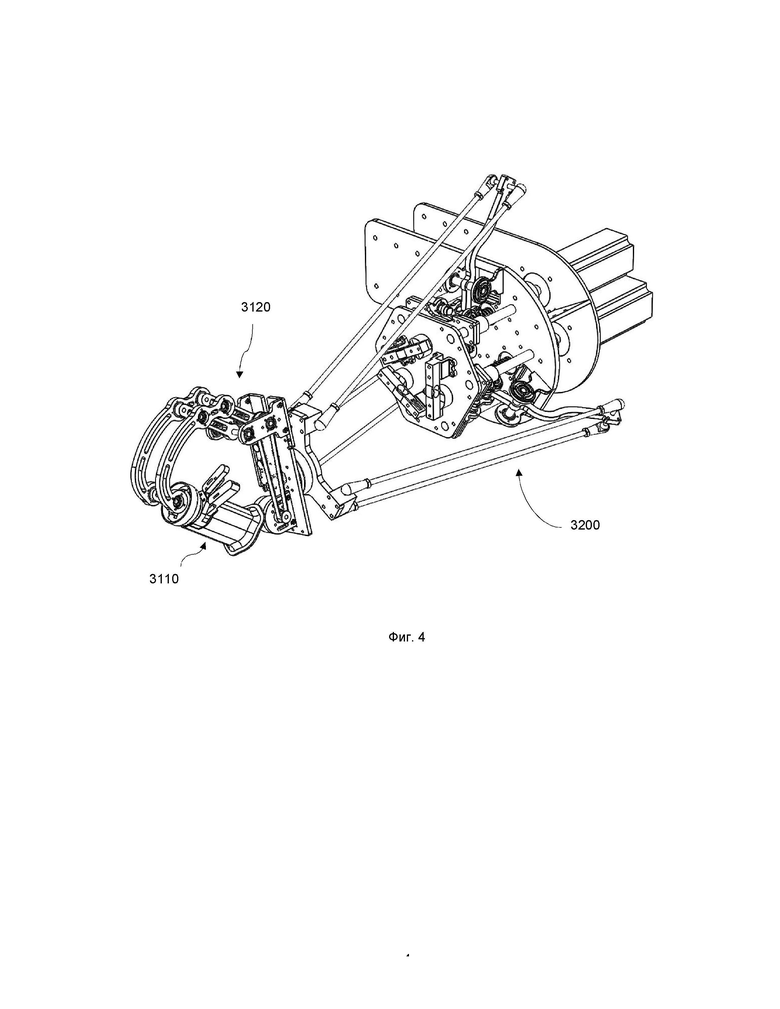
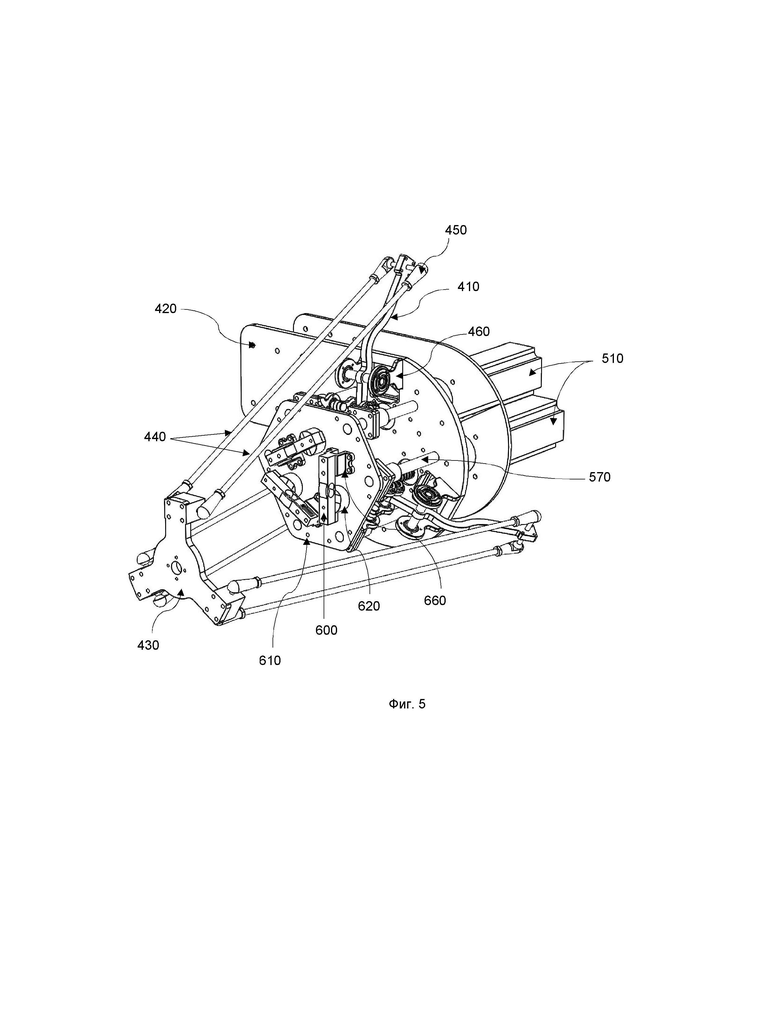
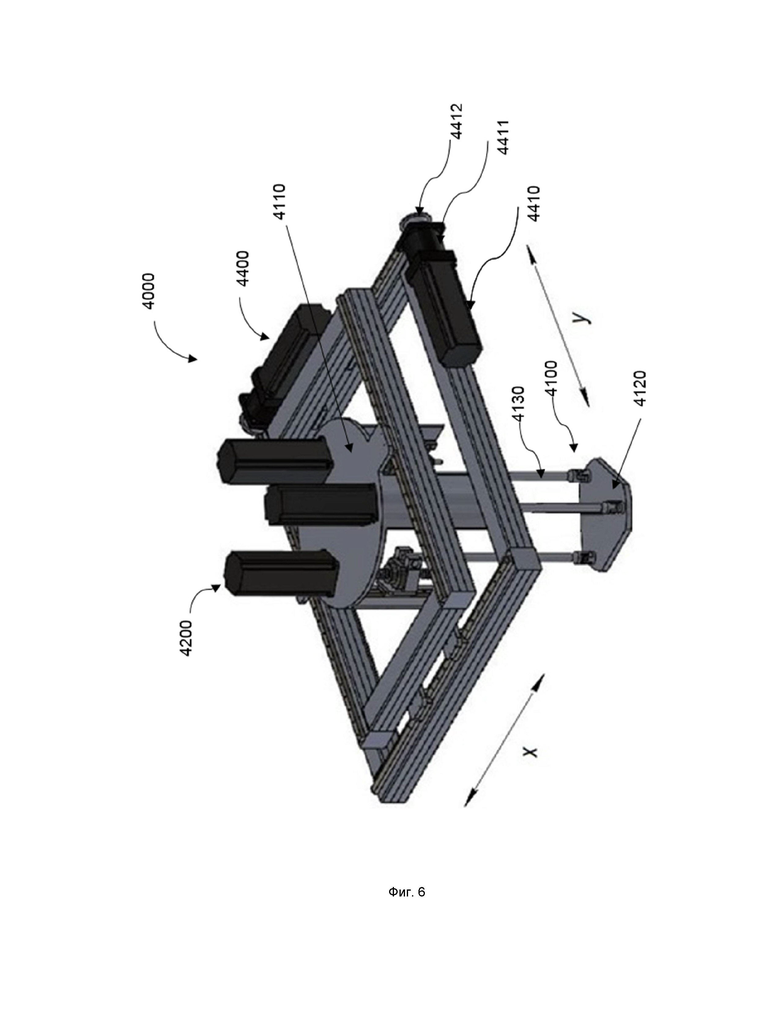
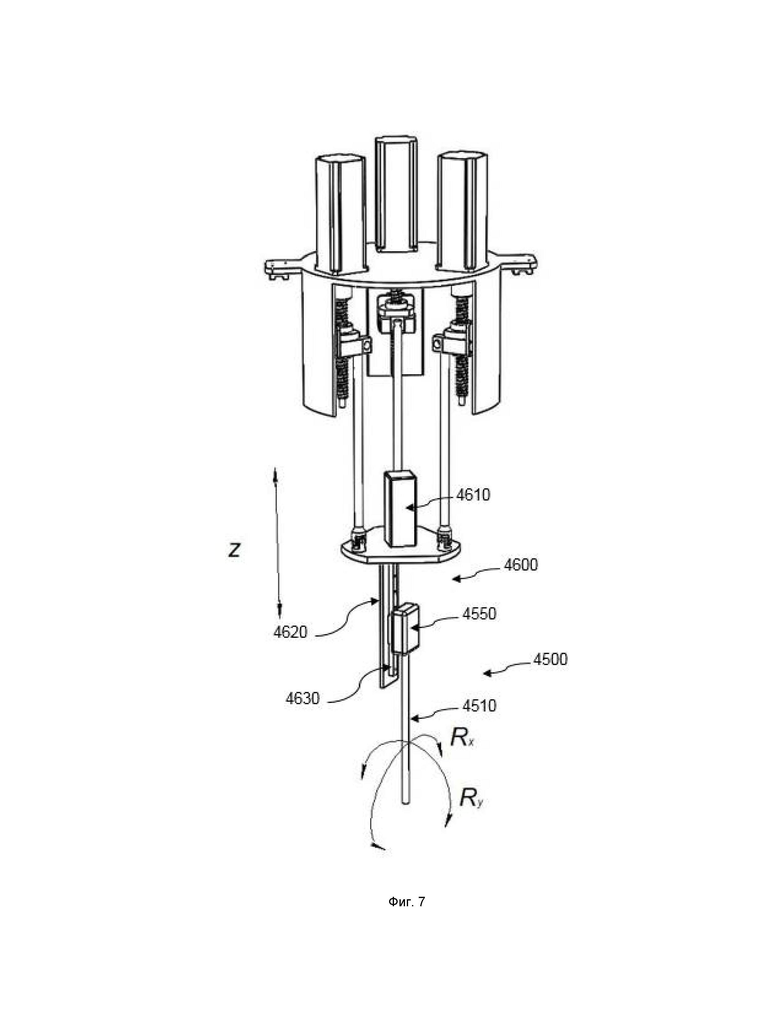
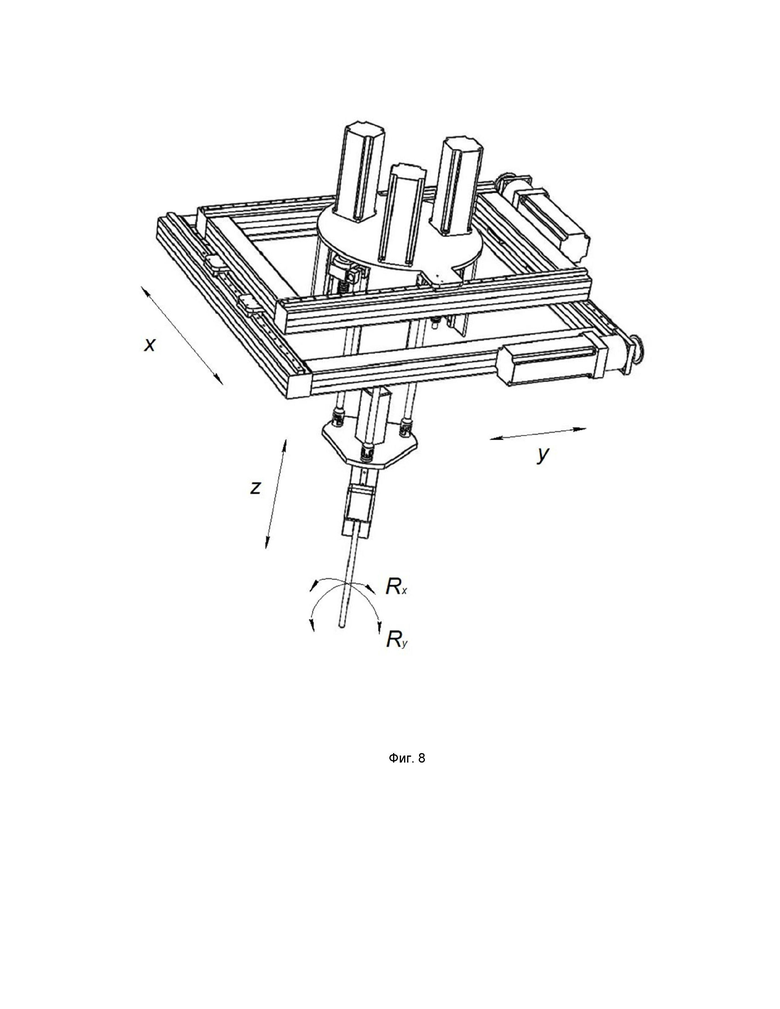
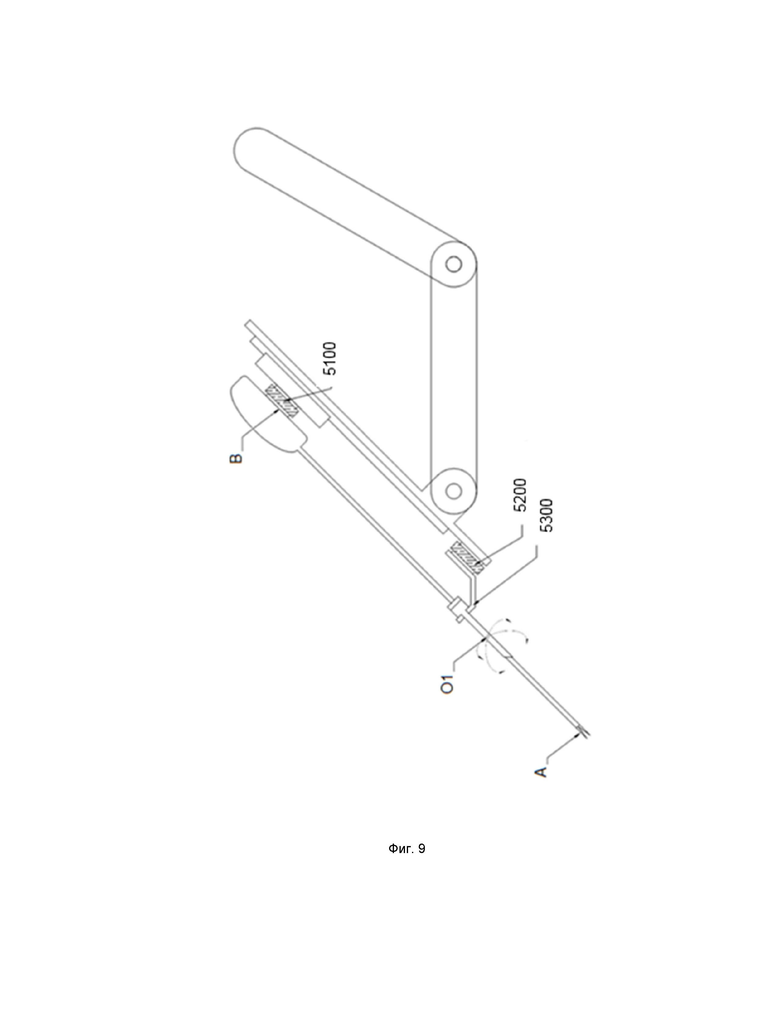
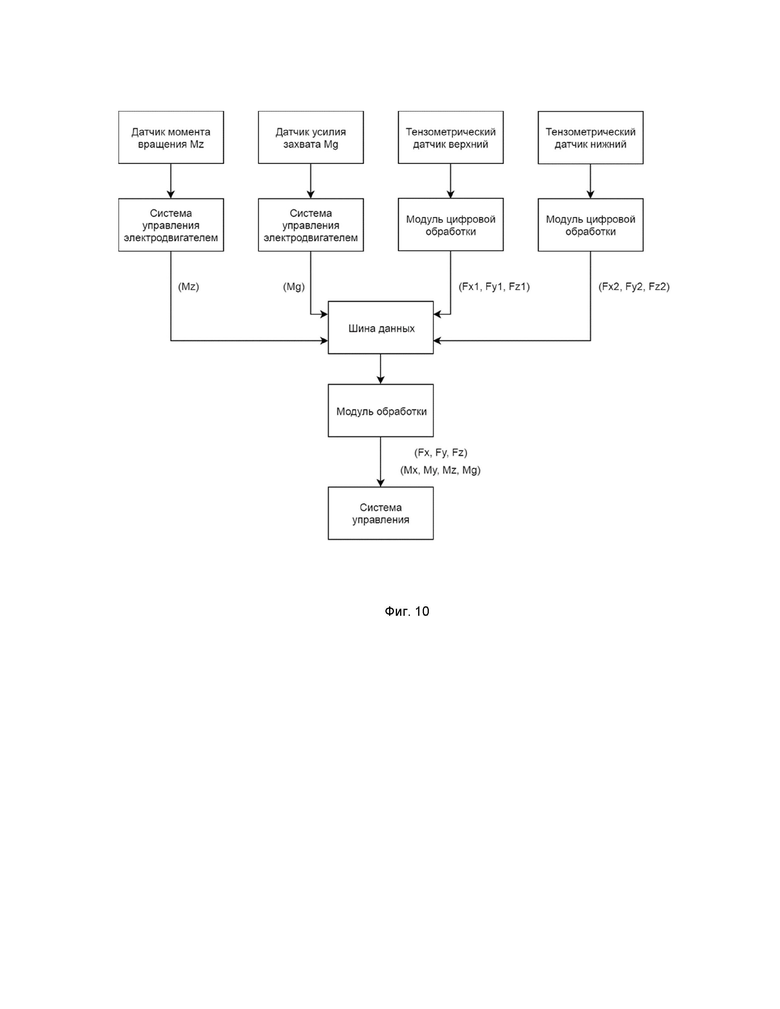
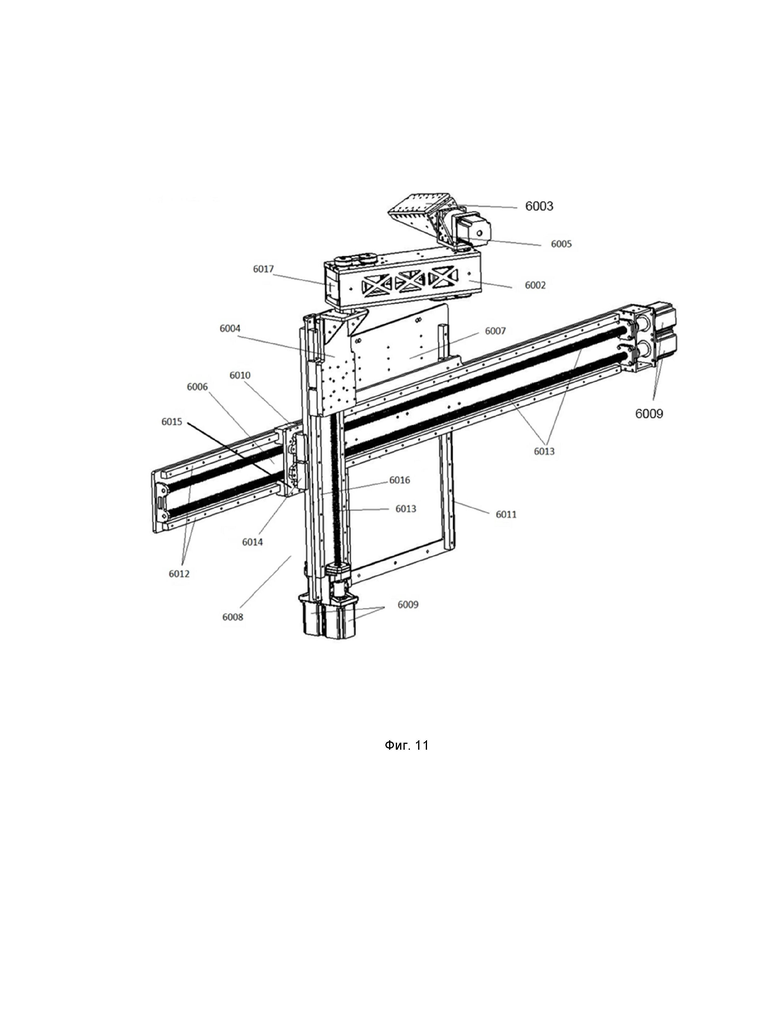
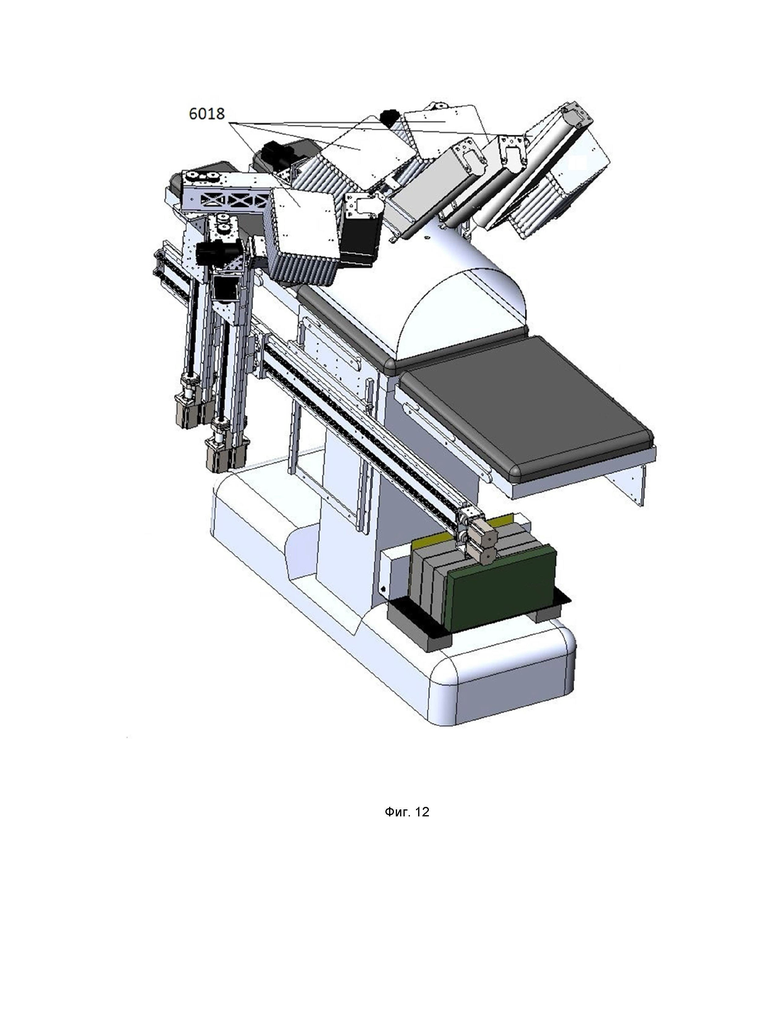
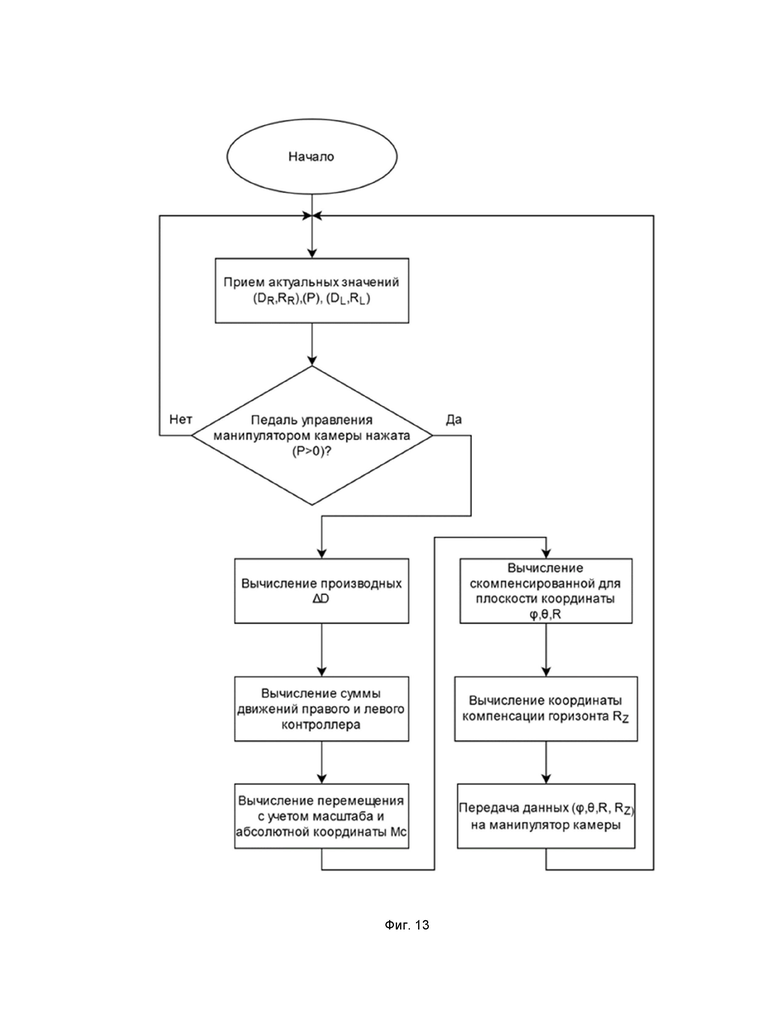
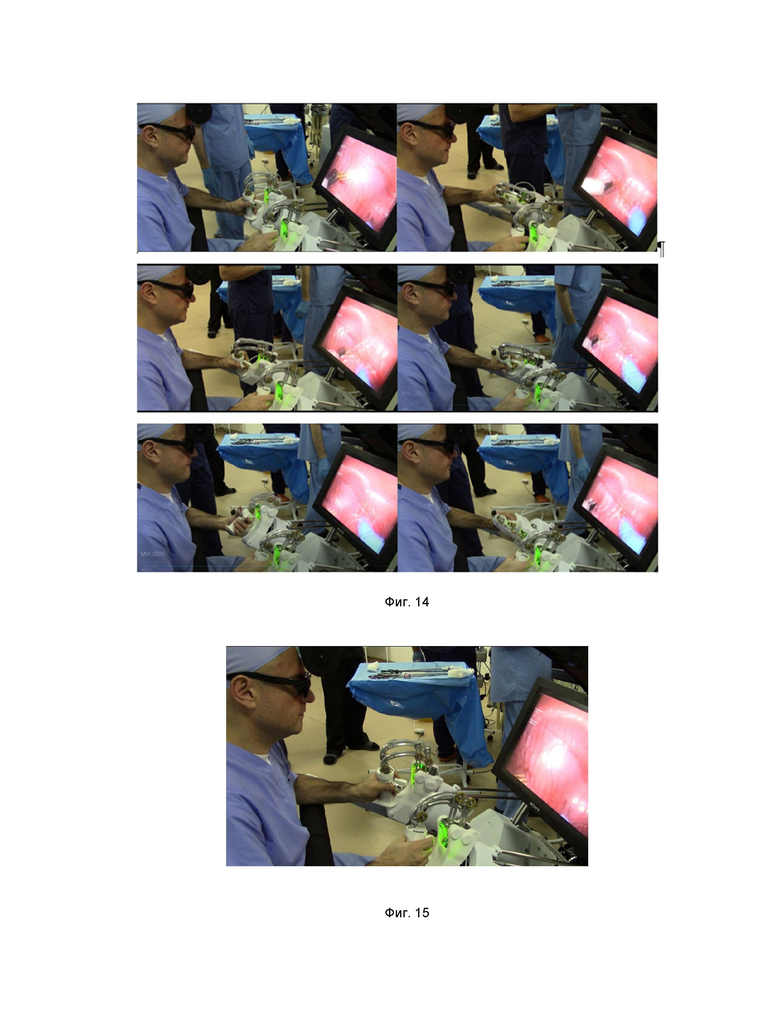
Изобретение относится к медицинской технике, а именно к ассистирующим хирургическим комплексам (2000) для выполнения высокоточных малоинвазивных хирургических операций. Комплекс содержит исполнительную консоль пациента, входную консоль оператора и систему числового программного управления (2200). Исполнительная консоль включает комбинированный манипулятор (2310) с установленным на нем хирургическим инструментом, манипулятор камеры (2320) с закрепленной на нем камерой для обзора операционного поля, систему позиционирования манипулятора (2340) и средства для вычисления и оценки сил, действующих на хирургический инструмент. Входная консоль включает контроллер оператора (2110) для управления движением хирургического инструмента с возможностью переключения в режим управления камерой с помощью педали управления и цифровой блок управления (2150). Комбинированный манипулятор включает механизм с приводными элементами и портальный механизм в виде модулей поперечного и продольного перемещения соответственно. Механизм с приводными элементами установлен на модуле поперечного перемещения с возможностью перемещения по нему в поперечном направлении. Модуль поперечного перемещения установлен на модуле продольного перемещения с возможностью перемещения по нему в продольном направлении. Средства для вычисления и оценки сил включают верхний и нижний трехосевые тензометрические датчики и выполненные в виде датчика силы тока для электродвигателя привода инструмента датчик усилия захвата исполнительных поверхностей инструмента и датчик момента вращения хирургического инструмента. Контроллер оператора включает дельта-робот и тензоплатформу, установленную между подвижной платформой и неподвижной опорной платформой дельта-робота. К подвижной платформе прикреплена управляющая ручка с возможностью ее охвата кистью руки оператора и сконфигурированная для контроля и преобразования в цифровой сигнал движения руки оператора по трем вращательным степеням свободы и силового воздействия на тензоплатформу по трем линейным степеням свободы. Достигается повышение точности управления, более полный набор роботохирургических функций с возможностью управляемого поворота камеры во время проведения операции на любой допустимый угол поворота с одновременной коррекцией с учетом этого поворота системы координат инструментов и контроллера, а также сокращение подготовительно-заключительного времени операции. 5 з.п. ф-лы, 15 ил.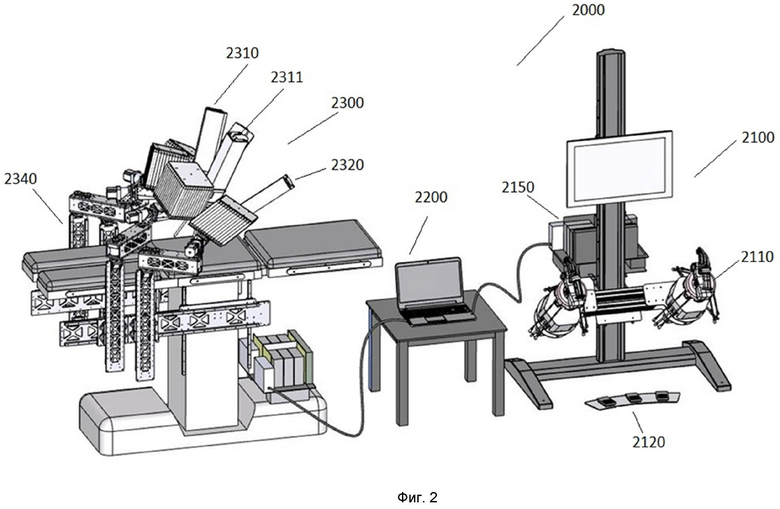
1. Ассистирующий хирургический комплекс для выполнения высокоточных малоинвазивных хирургических операций, содержащий
исполнительную консоль пациента, которая включает
по меньшей мере один комбинированный манипулятор с установленным на нем хирургическим инструментом для выполнения хирургической операции,
по меньшей мере один манипулятор камеры с закрепленной на нем камерой для обзора операционного поля, обеспечивающий ее перемещение по трем поступательным степеням свободы;
систему позиционирования по меньшей мере одного манипулятора, закрепленную на по меньшей мере одной продольной стороне хирургического стола и сконфигурированную для хранения по меньшей мере одного манипулятора под хирургическим столом в нерабочем положении и автоматического независимого выдвижения и перемещения каждого из манипуляторов в заданной области операционной зоны в рабочем положении,
средства для вычисления и оценки сил, действующих на дистальный конец хирургического инструмента, и сил, действующих на другие рабочие части хирургического инструмента,
входную консоль оператора, которая включает
по меньшей мере один контроллер оператора для управления движением хирургического инструмента, установленного на указанном комбинированном манипуляторе, сконфигурированный для обеспечения независимых семи степеней свободы при возникновении соответствующих управляющих усилий и/или движений со стороны руки оператора для поворота и/или перемещения контроллера рукой оператора, при этом контроллер оператора выполнен с возможностью переключения в режим управления камерой с помощью педали управления;
цифровой блок управления контроллером оператора, который по каждой степени подвижности контроллера оператора формирует сигнал движения руки оператора и преобразует его в управляющий сигнал для последующего управления комбинированным манипулятором и/или хирургическим инструментом, и/или манипулятором камеры,
систему числового программного управления ассистирующего хирургического комплекса, связанную с по меньшей мере одним комбинированным манипулятором, манипулятором камеры, со средствами вычисления и оценки сил, с системой позиционирования манипуляторами, с цифровым блоком управления контроллером,
выполненную с возможностью одновременного и независимого управления всеми элементами комплекса в целом,
и для формирования управляющих сигналов, характеризующих силовое воздействие по каждой степени подвижности хирургического инструмента и/или воздействие, рассчитанное на основе заданной модели, и передачи этих сигналов в цифровой блок управления контроллером оператора для их преобразования в механические движения элементов контроллера оператора,
причем комбинированный манипулятор включает
механизм, снабженный приводными элементами и выполненный в виде соединенных между собой посредством трех штанг неподвижной опорной платформы и подвижной платформы, подвижная платформа механизма выполнена с возможностью размещения на ней хирургического инструмента,
и портальный механизм, выполненный в виде модуля поперечного перемещения и модуля продольного перемещения, каждый из которых снабжен блоком приводов,
при этом приводные элементы и блоки приводов выполнены с возможностью передачи и/или получения данных от системы числового программного управления ассистирующего хирургического комплекса,
при этом механизм установлен на модуле поперечного перемещения с возможностью перемещения по нему в поперечном направлении, а модуль поперечного перемещения установлен на модуле продольного перемещения с возможностью перемещения по нему в продольном направлении;
причем все элементы системы позиционирования оснащены сервоприводами и контроллерами, выполненными с возможностью приема и передачи управляющих команд от системы числового программного управления ассистирующего хирургического комплекса для выполнения элементами системы согласованных движений,
причем средства для вычисления и оценки сил включают
- трехосевой нижний тензометрический датчик, расположенный на опоре манипулятора в месте закрепления троакара и находящийся в непосредственном контакте с ним, для измерения сил, приложенных к инструменту и направленных вдоль осей х и у,
- трехосевой верхний тензометрический датчик, расположенный на опоре манипулятора под приводом хирургического инструмента, для измерения силы, приложенной к инструменту и направленной вдоль оси z,
- датчик усилия захвата исполнительных поверхностей инструмента, выполненный в виде датчика силы тока для электродвигателя привода инструмента, обеспечивающего сжатие исполнительных поверхностей инструмента,
- датчик момента вращения хирургического инструмента, выполненный в виде датчика силы тока для электродвигателя привода инструмента, обеспечивающего вращение хирургического инструмента вокруг его продольной оси,
причем тензометрические датчики соединены с соответствующими модулями цифровой обработки данных, а датчик усилия захвата и датчик момента вращения соединены с соответствующими системами управления электродвигателем,
модули цифровой обработки и системы управления электродвигателями соединены с модулем обработки, который запрограммирован для осуществления вычисления посредством групповой обработки и синхронизации сигналов от тензометрических датчиков, датчика момента вращения и датчика усилия захвата:
- сил, направленных вдоль линейных осей,
- вращательных моментов инструмента вдоль осей х и у относительно точки ввода троакара в тело пациента,
- вращательного момента инструмента вдоль оси z относительно точки ввода троакара в тело пациента,
- усилия сжатия исполнительных поверхностей инструмента,
модуль обработки выполнен с возможностью передачи данных на систему числового программного управления ассистирующего хирургического комплекса,
причем контроллер оператора включает
дельта-робот, приводимый в движение с помощью приводного механизма, каждое звено которого выполнено в виде кривошипно-шатунного механизма, приводимого в движение сервоприводом с шарико-винтовой передачей;
тензоплатформу, установленную между подвижной платформой и неподвижной опорной платформой дельта-робота, причем на тензоплатформе расположены сопряженные с каждой шарико-винтовой передачей тензодатчики;
при этом к подвижной платформе прикреплена управляющая ручка с возможностью ее охвата кистью руки оператора и сконфигурированная для контроля и преобразования в цифровой сигнал движения руки оператора по меньшей мере по трем вращательным степеням свободы и силового воздействия на тензоплатформу по трем линейным степеням свободы,
при этом формирующийся на тензодатчиках сигнал передаётся на цифровой блок управления контроллером, который рассчитывает и передает на сервопривод соответствующего звена приводного механизма команды компенсации веса и/или перемещения по планируемой траектории, рассчитанной на основе полученных данных,
причем система числового программного управления ассистирующего хирургического комплекса выполнена с возможностью компенсации движения при управлении движением камеры.
2. Комплекс по п. 1, характеризующийся тем, что управляющая ручка контроллера оператора включает контроллер запястья, обеспечивающий две вращательные степени свободы в ортогональных плоскостях, и контроллер кисти, обеспечивающий две другие вращательные степени свободы.
3. Комплекс по п. 2, характеризующийся тем, что контроллер кисти оснащен рукояткой и пальцевыми схватами.
4. Комплекс по п. 3, характеризующийся тем, что внутри рукоятки контроллера кисти установлен по меньшей мере один приводной элемент и датчик поворота.
5. Комплекс по п. 2, характеризующийся тем, что контроллер запястья оснащен по меньшей мере одним приводным элементом и датчиком поворота.
6. Комплекс по п. 1, характеризующийся тем, что по меньшей мере один манипулятор в нерабочем положении находится под хирургическим столом в части для расположения ног.
| US 2019327394 A1, 24.10.2019 | |||
| US 2019047151 A1, 14.02.2019 | |||
| CN 208575867 U, 05.03.2019 | |||
| KR 101713676 B1, 08.03.2017 | |||
| WO 2019074670 A1, 18.04.2019 | |||
| EP 3159124 A1, 26.04.2017 | |||
| JP 6165080 B2, 19.07.2017 | |||
| ТЕПЛОВОЙ ТЕСТ-ОБЪЕКТ | 2013 |
|
RU2549072C1 |
| МАНИПУЛЯТОР ДЛЯ СУБМИКРОННЫХ ПЕРЕМЕЩЕНИЙ | 2018 |
|
RU2679260C1 |

