Заявляемое изобретение относится к электротехнической промышленности и может быть использовано при изготовлении космических аппаратов (КА).
При создании КА, большое внимание уделяется обеспечению надежности технологии проводимых работ.
Эта задача может быть решена при условии обеспечения широких функциональных возможностей технологического процесса электрических проверок КА и совершенствования контрольно-проверочной аппаратуры.
Известен способ электрических проверок КА, реализованный «Автоматизированной испытательной системой для отработки, электрических проверок и подготовки к пуску космических аппаратов», описанный в материалах патента №2245825, B64G 5/00.
Известный способ заключается в автоматизированной выдаче технологических команд и радиокоманд, допусковом контроле дискретных и аналоговых параметров, параметров по данным бортовой системы телеизмерения, контроле поставленных на слежение параметров бортовой вычислительной системы, контроле сопротивления изоляции бортовых шин относительно корпуса, формирования директив оператора в ручном режиме, формировании протокола испытаний, отображения текущего состояния процесса испытаний.
Недостатком известного способа электрических проверок КА является необходимость выведения для контроля с КА большого количества дискретных (технологических используемых только на Земле) параметров, что ведет к неэффективному (неиспользуемому в полете) увеличению массы самого КА.
Наиболее близким техническим решением является «Способ электрических проверок космических аппаратов», описанный в материалах патента №2447002, B64G 5/00, который выбран в качестве прототипа.
Известный способ заключается в проведении включения и выключения космического аппарата, включая подключение или отключение бортовых источников электропитания или их наземных имитаторов, автоматизированной выдаче команд управления, допусковом контроле дискретных и аналоговых параметров по данным бортовой системы телеизмерения и контроле поставленных на слежение параметров бортовой вычислительной системы, контроле сопротивления изоляции бортовых шин относительно корпуса, формировании директив автоматической программы и директив оператора в ручном режиме, формировании протокола испытаний, отображении текущего состояния процесса испытаний, отличающийся тем, что в процессе проведения включения космического аппарата перед подключением бортовых источников электропитания или их наземных имитаторов дополнительно контролируют электрическое сопротивление между шинами питания космического аппарата на предмет соответствия его наперед заданному значению, а при его несоответствии наперед заданному значению включение космического аппарата запрещают.
Недостатком известного способа электрических проверок КА является также необходимость выведения для контроля с КА большого количества дискретных (технологических используемых только на Земле) параметров, иными словами, нетехнологичность контроля дискретных параметров КА в процессе проведения его электрических проверок, что приводит к искусственному ограничению их количества и снижает тем самым надежность процесса электрических проверок КА.
Задачей заявляемого изобретения является улучшение технологии контроля технологических параметров КА в процессе проведения его электрических проверок и повышение надежности процесса электрических проверок КА.
Поставленная задача решается тем, что при проведении включения и выключения космического аппарата, включая подключение или отключение бортовых источников электропитания или их наземных имитаторов, автоматизированной выдачи команд управления, допускового контроля дискретных и аналоговых параметров по данным бортовой системы телеизмерения и контроля поставленных на слежение параметров бортовой вычислительной системы, контроля сопротивления изоляции бортовых шин относительно корпуса, контроля технологических сигнальных параметров космического аппарата, формирования директив автоматической программы и директив оператора в ручном режиме, формирования протокола испытаний, отображения текущего состояния процесса испытаний, контакты технологических сигнальных параметров объединяют по какому-либо признаку в «n» групп, где n≥1, в каждой группе объединенных технологических сигнальных параметров контакты соединяют в последовательную цепь, при этом все контакты шунтируют индивидуальными резисторами разного номинала, а контроль каждой группы объединенных технологических сигнальных параметров проводят путем измерения сопротивления последовательной цепи контактов, при этом, по величине измеренного сопротивления судят о состоянии каждого технологического сигнального параметра измеряемой группы. Кроме того, сопротивление индивидуальных резисторов выбирают исходя из геометрической прогрессии, причем знаменатель геометрической прогрессии выбирают из соотношения: З>(R1+Rпогр)/R1, где
R1 - сопротивление первого резистора (первого члена геометрической прогрессии), Ом;
Rпогр - сопротивление вероятной погрешности измерения, связанной с наличием сопротивления соединительных проводов, температурного и ресурсного ухода номинала сопротивлений и прочее, Ом.
Действительно, объединение технологических сигнальных параметров по какому-либо признаку в «n» групп позволит, на порядок (и более) сократить количество цепей их вывода для контроля на наземную аппаратуру, что минимизирует неэффективное увеличение массы КА. Это улучшает технологию контроля технологических параметров КА в процессе проведения его электрических проверок и повышает надежность процесса электрических проверок КА.
Из множества технологических параметров, используемых при электрических проверках КА, можно выделить технологические сигнальные параметры, объединенные признаком функционального назначения, параметры исходного состояния систем и приборов КА.
Рассмотрим работу заявляемого изобретения на примере контроля сигнальных параметров исходного состояния систем и приборов КА.
Для этого контакты исходного состояния систем и приборов КА выводят на систему управления и контроля электрических проверок КА.
Однако большое количество перечня этих контактов делает такой контроль нетехнологичным, а в отдельных случаях, в составе средств выведения КА на орбиту, невозможным из-за ограниченного числа цепей на средствах выведения.
Предлагается цепи контроля исходного всех систем (приборов) космического аппарата объединить в группу технологических сигнальных параметров - последовательную цепь контактов, при этом контакты контроля исходного каждой системы (прибора) зашунтировать индивидуальными резисторами разного номинала. При этом контроль исходного систем (приборов) космического аппарата проводить путем измерения сопротивления единой последовательной цепи контактов всех систем (приборов) космического аппарата и по величине измеренного сопротивления судить об исходном состоянии систем (приборов), либо о неисходном состоянии отдельных конкретных систем (приборов). При этом сопротивление индивидуальных резисторов выбирают исходя из геометрической прогрессии, причем знаменатель геометрической прогрессии выбирают из соотношения: З>(R1+Rпогр)/R1, где
R1 - сопротивление первого резистора (первого члена геометрической прогрессии), Ом;
Rпогр - сопротивление вероятной погрешности измерения, связанной с наличием сопротивления соединительных проводов, температурного и ресурсного ухода номинала сопротивлений и прочее, Ом.
Действительно, объединение всех контактов в последовательную цепь позволит получить один общий и универсальный параметр контроля исходного, который можно использовать при любой конфигурации состояния КА. Если во всех системах (приборах) исходное состояние (соответствующие контакты «K» замкнуты), то измеренное сопротивление будет минимальным (до нескольких Ом). Если где-то отсутствует исходное (соответствующий контакт «K» разомкнут), то в измеряемую цепь добавится соответствующее сопротивление «R». Выбор сопротивлений из ряда геометрической прогрессии делает любое сочетание замкнутых и разомкнутых контактов «K» уникальным. Для учета вероятной погрешности измерения, связанной с наличием сопротивления соединительных проводов, температурного и ресурсного ухода номинала сопротивлений и прочего следует воспользоваться рекомендацией по выбору знаменателя геометрической прогрессии: З>(R1+Rпогр)/R1, где
R1 - сопротивление первого резистора (первого члена геометрической прогрессии), Ом;
Rпогр - сопротивление вероятной погрешности измерения, связанной с наличием сопротивления соединительных проводов, температурного и ресурсного ухода номинала сопротивлений и прочее, Ом.
Это позволяет однозначно определить в какой системе (приборе) исходное отсутствует, оперативно устранить замечание и продолжить работу.
Аналогично будет работать (контролироваться) и любая другая группа технологических параметров.
Суть заявляемого изобретения поясняется чертежом фиг.1, на котором приведена блок-схема наземной системы управления и контроля электрических проверок КА. При этом структура приборного состава КА полностью не раскрыта, показаны отдельные элементы, непосредственно взаимодействующие с наземной системой.
КА 1, в частности, содержит:
2 - бортовые шины питания;
3 - командную матрицу системы управления бортовой аппаратурой по радиокомандам (РК) и технологическим командам (ТК);
4 - систему бортовых телеизмерений (ТМ), содержащую контакты контроля исходного K1, зашунтированные резистором R1;
5 - бортовую вычислительную машину (БВМ), содержащую контакты контроля исходного K2, зашунтированные резистором R2;
1-1 - другие системы и приборы КА (не раскрыто).
Система управления и контроля электрических проверок КА содержит следующие основные блоки:
6 - блок формирования команд управления (РК, ТК);
7 - блок связи с системой бортовых телеизмерений (Контроль ТМ);
8 - блок связи с бортовой вычислительной машиной (Контроль БВМ);
9 - блок контроля сопротивления изоляции бортовых шин питания (Rизоляции);
10 - блок формирования директив оператора в автоматическом режиме (процессор);
11 - блок формирования директив оператора в ручном режиме (Оператор);
12 - блок формирования протокола испытаний (Протокол);
13 - блок отображения (Монитор);
14 - блок измерений электрического сопротивления цепей (Rцепей).
Система работает следующим образом.
В блок формирования директив оператора в автоматическом режиме 10 закладываются циклограммы различных электрических проверок, в том числе и циклограммы включения и выключения КА. Оператор через блок формирования директив оператора в ручном режиме 11 запускает требующуюся циклограмму. Далее процесс идет автоматически. Текущие данные работ отображаются на блоке отображения (мониторе ПЭВМ) 13 и запоминаются в блоке формирования протокола испытаний 12. Блок формирования директив оператора в автоматическом режиме инициирует выдачу команд управления через блок формирования команд управления 6, анализирует поступающую информацию от бортовой телеметрии и бортовой вычислительной машины через блоки связи с системой бортовых телеизмерений 7 и связи с бортовой вычислительной системой 8. Параллельно идет контроль сопротивления изоляции через блок контроля сопротивления изоляции бортовых шин питания 9.
Рассмотрим работу системы на примере контроля параметров исходного систем (приборов) КА.
При количестве технологических сигнальных контактов в группе, равном 10 (для примера), сопротивлении первого резистора 10 Ом и сопротивлении вероятной погрешности 5 Ом, можно использовать резисторы следующего ряда (геометрической прогрессии со знаменателем З>(R1+Rпогр)/R1=(10+5)/10=1,5) со знаменателем (для примера), равным 2: 10, 20, 40, 80, 160, 320, 640, 1280, 2560, 5120 Ом
Перед включением КА для проведения электроиспытаний контролируют электрическое сопротивление группы объединенных технологических сигнальных параметров контроля исходного систем (приборов) КА через блок измерений электрического сопротивления 14. В случае, если измеренное значение не соответствует минимальному значению, появляется сообщение о системах (приборах), где исходное отсутствует, что позволяет оперативно устранить замечание и продолжить работу.
Таким образом, предлагаемый способ электрических проверок КА улучшает технологию контроля технологических параметров КА в процессе проведения его электрических проверок и повышает надежности процесса электрических проверок КА.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЭЛЕКТРИЧЕСКИХ ПРОВЕРОК КОСМИЧЕСКОГО АППАРАТА | 2015 |
|
RU2619151C2 |
| Контрольно-проверочная аппаратура космического аппарата | 2018 |
|
RU2717293C1 |
| СПОСОБ ЭЛЕКТРИЧЕСКИХ ПРОВЕРОК КОСМИЧЕСКОГО АППАРАТА | 2016 |
|
RU2647808C2 |
| СПОСОБ ЭЛЕКТРИЧЕСКИХ ПРОВЕРОК КОСМИЧЕСКОГО АППАРАТА | 2016 |
|
RU2647806C2 |
| СПОСОБ ЭЛЕКТРИЧЕСКИХ ПРОВЕРОК КОСМИЧЕСКОГО АППАРАТА | 2012 |
|
RU2513322C2 |
| СПОСОБ ЭЛЕКТРИЧЕСКИХ ПРОВЕРОК КОСМИЧЕСКОГО АППАРАТА | 2013 |
|
RU2559661C2 |
| СПОСОБ ЭЛЕКТРИЧЕСКИХ ПРОВЕРОК КОСМИЧЕСКОГО АППАРАТА | 2010 |
|
RU2447002C1 |
| КОНТРОЛЬНО-ПРОВЕРОЧНАЯ АППАРАТУРА КОСМИЧЕСКОГО АППАРАТА | 2014 |
|
RU2563925C1 |
| СПОСОБ ЭЛЕКТРИЧЕСКИХ ПРОВЕРОК КОСМИЧЕСКОГО АППАРАТА | 2012 |
|
RU2522669C2 |
| АВТОМАТИЗИРОВАННАЯ ИСПЫТАТЕЛЬНАЯ СИСТЕМА ДЛЯ ОТРАБОТКИ, ЭЛЕКТРИЧЕСКИХ ПРОВЕРОК И ПОДГОТОВКИ К ПУСКУ КОСМИЧЕСКИХ АППАРАТОВ | 2003 |
|
RU2245825C1 |
Изобретение относится к электротехнической промышленности и может быть использовано при изготовлении космических аппаратов (КА). Способ электрических проверок космических аппаратов заключается в проведении включения и выключения КА, включая подключение или отключение бортовых источников электропитания или их наземных имитаторов. Автоматизированной системой выдаются команды управления, допускового контроля дискретных и аналоговых параметров по данным бортовой системы телеизмерения и контроля поставленных на слежение параметров бортовой вычислительной системы. Контролируются также сопротивление изоляции бортовых шин относительно корпуса и технологические сигнальные параметры КА. Формируются директивы автоматической программы и оператора в ручном режиме, а также протокол испытаний и отображение текущего состояния процесса испытаний. Сопротивление индивидуальных резисторов выбирают исходя из геометрической прогрессии. Техническим результатом изобретения является повышение надежности процесса электрических проверок КА. 1 з.п. ф-лы, 1 ил.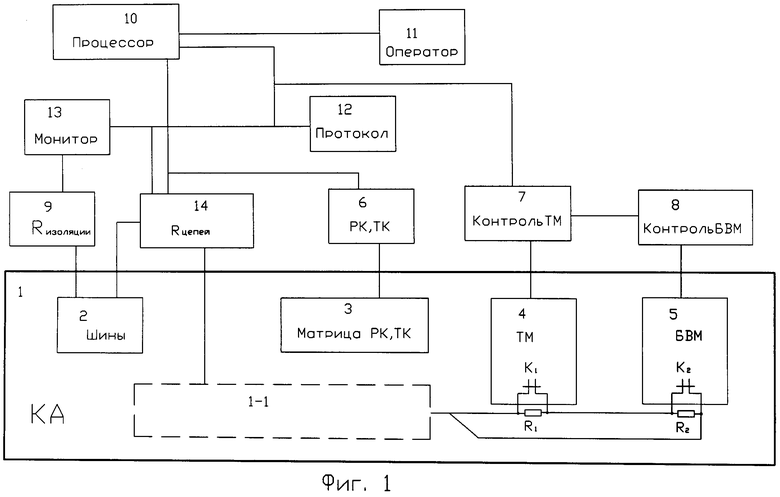
1. Способ электрических проверок космических аппаратов, заключающийся в проведении включения и выключения космического аппарата, включая подключение или отключение бортовых источников электропитания или их наземных имитаторов, автоматизированной выдачи команд управления, допускового контроля дискретных и аналоговых параметров по данным бортовой системы телеизмерения и контроля поставленных на слежение параметров бортовой вычислительной системы, контроля сопротивления изоляции бортовых шин относительно корпуса, контроля технологических сигнальных параметров космического аппарата, формирования директив автоматической программы и директив оператора в ручном режиме, формирования протокола испытаний, отображения текущего состояния процесса испытаний, отличающийся тем, что контакты технологических сигнальных параметров объединяют в «n» групп, где n≥1, в каждой группе объединенных технологических сигнальных параметров контакты соединяют в последовательную цепь, при этом все контакты шунтируют индивидуальными резисторами разного номинала, а контроль каждой группы объединенных технологических сигнальных параметров проводят путем измерения сопротивления последовательной цепи контактов, при этом по величине измеренного сопротивления судят о состоянии каждого технологического сигнального параметра измеряемой группы.
2. Способ электрических проверок космических аппаратов по п.1, отличающийся тем, что сопротивление индивидуальных резисторов выбирают исходя из геометрической прогрессии, причем знаменатель геометрической прогрессии выбирают из соотношения: З>(R1+Rпогр)/R1, где
R1 - сопротивление первого резистора (первого члена геометрической прогрессии), Ом;
Rпогр - сопротивление вероятной погрешности измерения, связанной с наличием сопротивления соединительных проводов, температурного и ресурсного ухода номинала сопротивлений и прочее, Ом.
| СПОСОБ ЭЛЕКТРИЧЕСКИХ ПРОВЕРОК КОСМИЧЕСКОГО АППАРАТА | 2010 |
|
RU2447002C1 |
| Пневматический перш для цирковых аттракционов | 1940 |
|
SU81847A1 |
| АВТОМАТИЗИРОВАННАЯ ИСПЫТАТЕЛЬНАЯ СИСТЕМА ДЛЯ ОТРАБОТКИ, ЭЛЕКТРИЧЕСКИХ ПРОВЕРОК И ПОДГОТОВКИ К ПУСКУ КОСМИЧЕСКИХ АППАРАТОВ | 2003 |
|
RU2245825C1 |
| US 3535683 A1, 20.10.1970. | |||

