Изобретение относится к области электротехники и может быть использовано при организации безопасного и удобного способа складирования в автоматизированных системах обработки и хранения грузов (AS/RS), путем решения задачи локализации складских грузовых платформ в режиме реального времени внутри складских сооружений.
Особенность функционирования систем AS/RS сводится к тому, что работа складских грузовых платформ в штабелерах характеризуется высокой динамической загруженностью, которая снижается при контроле перемещения складских грузовых платформ за счет:
- сокращения затрат на складское хранение;
- уменьшения времени, затрачиваемое на проведение всех складских операций;
- уменьшения количества ошибочных складских операций;
- повышения точности и оперативности учета товара;
- избежания потерь, связанных с критичностью сроков реализации товаров;
- уменьшения затрат на заработную плату складских работников.
В связи с этим контроль перемещения складских грузовых платформ, который является неотъемлемой частью технологического комплекса или транспортно-перегрузочного потока, оказывает существенное влияние на производительность и эффективность функционирования транспортных средств и производственного оборудования в целом.
Обобщая проведенный выше анализ особенностей функционирования грузовых платформ, можно отметить, что автоматический контроль перемещения складских грузовых платформ позволяет организовать:
- мнемосхему склада в реальном времени;
- автоматизацию процесса оформления документов;
- уникальный неизменяемый идентификатор, присваиваемый метке при производстве, что гарантирует высокую степень защиты от подделки;
- управление перемещением паллет по цепи поставки в реальном времени.
В настоящее время широкое применение получили системы автоматического контроля перемещения складских грузовых платформ с использованием радиочастотной идентификации (RFID-технология) [1], имеющие ряд преимуществ:
- RFID-метки могут перезаписываться и дополняться много раз;
- отсутствие необходимости RFID-считывателю в прямой видимости метки, чтобы считать ее данные;
- большое расстояние чтения (до нескольких сотен метров);
- большой объем хранения данных;
- поддержка чтения нескольких меток;
- считывание данных метки при любом ее расположении;
- устойчивость к воздействию окружающей среды;
- интеллектуальное поведение;
- высокая степень защиты меток от подделки.
Известен способ определения координат положения подвижного объекта (складских грузовых платформ) в закрытых помещениях [Заявка на изобретение №2004126292 RU, G01S 1/00, G01S 5/00, G08B 7/06, Опубл. заявки 20.02.2006], сводящийся к обработке информационных сигналов от n контрольных точек, которые задаются в виде радиочастотных идентификаторов, закрепленных на подвижных объектах (складских грузовых платформ), а один считыватель закрепляют на элементах конструкции пункта контроля, считыватель соединяют с контроллером локальной сети, который соединяют с центральной ЭВМ, а в помещениях (шахтах, складах), на элементах строительных конструкций закрепляют необходимое количество считывателей или радиочастотных идентификаторов, в которые заносят коды координат положения этих считывателей или радиочастотных идентификаторов (в местной системе координат).
Недостатком устройства по данному способу является:
- сложность устройства контроля, которая определяется необходимостью организации N каналов радиосвязи с N точек контроля мест адресования складских грузовых платформ;
- низкой достоверности результатов контроля из-за отсутствия самоконтроля самого устройства определения координат положения подвижного объекта (складских грузовых платформ) в закрытых помещениях;
- относительно высокая стоимость меток, поэтому технология RFID еще достаточно дорога и не оправдывает вкладываемых в него средств;
- возможное экранирование при размещении на металлических поверхностях;
- подверженность RFID-системы воздействию от включенного оборудования, излучающего радиопомехи в диапазоне ее рабочих частот;
- незащищенность радиочастотных идентификаторов от взлома;
- сложность самостоятельного изготовления, поскольку производство RFID-меток требует дополнительных ресурсов;
- недостаточная открытость выработанных стандартов.
Известна система определения местоположения подвижного объекта [Свидетельство на полезную модель №15792 RU, G01S 3/02, Опубл. 10.11.2000], содержащая аппаратуру подвижного объекта, включающую в себя антенну, приемник и передатчик, N точек контроля в виде базовых станций с собственными антеннами, приемниками и передатчиками, основную станцию с антенной, приемником, передатчиком и орган обработки информационных сигналов для определения местоположения подвижного объекта.
Недостатком данной системы является:
- сложность устройства контроля, которая определяется необходимостью организации N каналов радиосвязи с N точек контроля мест адресования складских грузовых платформ;
- сложность устройства контроля приводит также к низкой достоверности результатов контроля из-за отсутствия самоконтроля самого устройства контроля;
- относительно высокая стоимость меток, поэтому технология RFID еще достаточно дорога и не оправдывает вкладываемых в него средств;
- возможное экранирование при размещении на металлических поверхностях;
- подверженность систем радиочастотной идентификации помехам в виде электромагнитных полей от включенного оборудования, излучающего радиопомехи в диапазоне частот, используемом для работы RFID-системой;
- незащищенность радиочастотных идентификаторов от взлома;
- сложность самостоятельного изготовления, поскольку производство RFID-меток требует дополнительных ресурсов;
- недостаточная открытость выработанных стандартов.
Наиболее близким техническим решением к изобретению (прототипом) в части способа является способ автоматического контроля перемещения складских грузовых платформ [Патент RU №2470316, G01S 5/00, Опубл 20.12.2012], сводящийся к обработке информации результатов контроля в N контрольных точках, разбиению складского помещения на зоны размещения (адресования) складских грузовых платформ, в этих зонах задают контрольные точки присутствия складских грузовых платформ, которые последовательно нумеруют, масштабируют токи от каждой контрольной точки с коэффициентом масштабирования от каждой контрольной точки пропорционально номеру контрольной точки i, масштабированные токи от каждой контрольной точки суммируют в точке суммирования и передают через канал связи в орган обработки информации, где преобразуют данный ток в пропорциональное напряжение, из которого вычитается напряжение, пропорциональное суммарным координатам уже размещенных в помещении склада складских грузовых платформ, и по величине результирующего напряжения идентифицируют координату положения складской грузовой платформы в линейной системы координат, фиксируют координату окончательного размещения в помещении склада платформы и суммируют ее (при отгрузке вычитают из) с суммарными координатами ранее окончательно размещенных складских грузовых платформ и далее переходят от линейной системы координат к двухкоординатной системе с абсциссой Х, равной
и ординатой Y, равной
 ,
,
где i - координата в линейной системе координат (порядковый номер точки контроля), n - количество зон размещения складских грузовых платформ по оси ординат в контролируемом помещении, [] - целая часть результата деления.
Недостаток данного способа определяется тем, что в рамках данного способа отслеживается срабатывание одного датчика, т.е. устройство, реализованное по данному способу, имеет ограничение в случае одновременного срабатывания в двух и более датчиков при регистрации одновременно нескольких складских грузовых платформ.
Наиболее близким техническим решением к изобретению (прототипом) по отношению к устройству является устройство автоматического контроля перемещения складских грузовых платформ по данному способу [Патент RU №2470316, G01S 5/00, Опубл 20.12.2012], содержащее блок N дискретных датчиков релейного типа, размещенных в N контрольных точках и орган обработки информационных сигналов, вход которого подключен к выходу канала связи, блок суммирования масштабированных токов с коэффициентом масштабирования по каждому входу, пропорциональным номеру этого входа, причем i-й вход блока суммирования масштабированных токов подключен к выходу i-ого датчика, а выход блока суммирования масштабированных токов соединен с входом канала связи, орган обработки информации содержит блок преобразования тока в напряжение, вычитатель, АЦП, вычислитель, блок памяти, ЦАП, пороговый элемент, R-S триггер, одновибратор и два элемента задержки сигнала, причем вход органа обработки информации соединен с входом блока преобразования тока в напряжение, выход которого соединен с первым входом вычитателя, ко второму входу которого подключен выход ЦАП, а выход к входу АЦП, информационные выходы которого подключены к первым информационным входам вычислителя, первые управляющие выходы которого являются выходами управления платформой всего устройства, а первые и вторые информационные выходы соединены с первыми и вторыми информационными входами блока памяти соответственно, третьи информационные выходы вычислителя являются первыми информационными входами мнемосхемы склада, ко вторым информационным входам которого подключены первые информационные выходы блока памяти, вторые информационные выходы которого подключены к информационным входам ЦАП и вторым информационным входам вычислителя, третьи информационные входы которого подключены к выходам пульта оператора, выход вычитателя подключен через пороговый элемент, S-вход R-S триггера, одновибратор и первый элемент задержки сигнала к входу стробирования АЦП, который соединен с R-входом R-S триггера и через второй элемент задержки сигнала с входом стробирования вычислителя, а второй и третий управляющие выходы последнего соединены с соответствующими входами "ЗАПИСЬ" блока памяти.
В данном устройстве автоматического контроля перемещения складских грузовых платформ блок суммирования масштабированных токов состоит из N резисторов, причем величина i-ого резистора обратно пропорциональна его номеру i, первый конец i-ого резистора подключен к i-ому входу блока суммирования токов, а вторые концы всех резисторов блока суммирования токов объединены и подключены к его выходу.
Недостаток данного устройства определяется тем, что данное устройство отслеживается срабатывание одного датчика, т.е. данное устройство имеет ограничение в случае одновременного срабатывания в двух и более датчиков при регистрации одновременно нескольких складских грузовых платформ.
Практически во всех областях промышленной индустрии используются различные модели горизонтальных и вертикальных конвейерных систем карусельного типа грузовых платформ и автопогрузчиков с вертикальным подъемом. Однако до недавнего времени транспортно-перегрузочный процесс относили к вспомогательным, придавая ему второстепенное значение, и там, где возможно, старались обойтись без автоматизации грузовых платформ. Теперь, когда все чаще грузовых платформ становятся неотъемлемой частью системы автоматизированных машин, отношение к автоматизации грузовых платформ меняется. Причем повышение производительности основного оборудования требует повышения производительности грузовых платформ.
Технической задачей, решаемой изобретением, является увеличение производительности и надежности грузовых платформ в AS/RS системах за счет локализации объектов в режиме реального времени внутри складских сооружений в том числе и за счет увеличение количества одновременно отслеживаемых на складе грузовых платформ. Решение данной задачи позволит использовать грузовых платформ для работы в автоматическом цикле в составе гибких производственных систем.
В связи с этим особенностью данного решения является то, что при организации передачи информации от контрольной точки о присутствии складских грузовых платформ в соответствующей зоне размещения (адресования) в контролируемом помещении в орган обработки информации результатов контроля в предлагаемом устройстве одновременного автоматического контроля перемещения нескольких складских грузовых платформ используется one-wire технология.
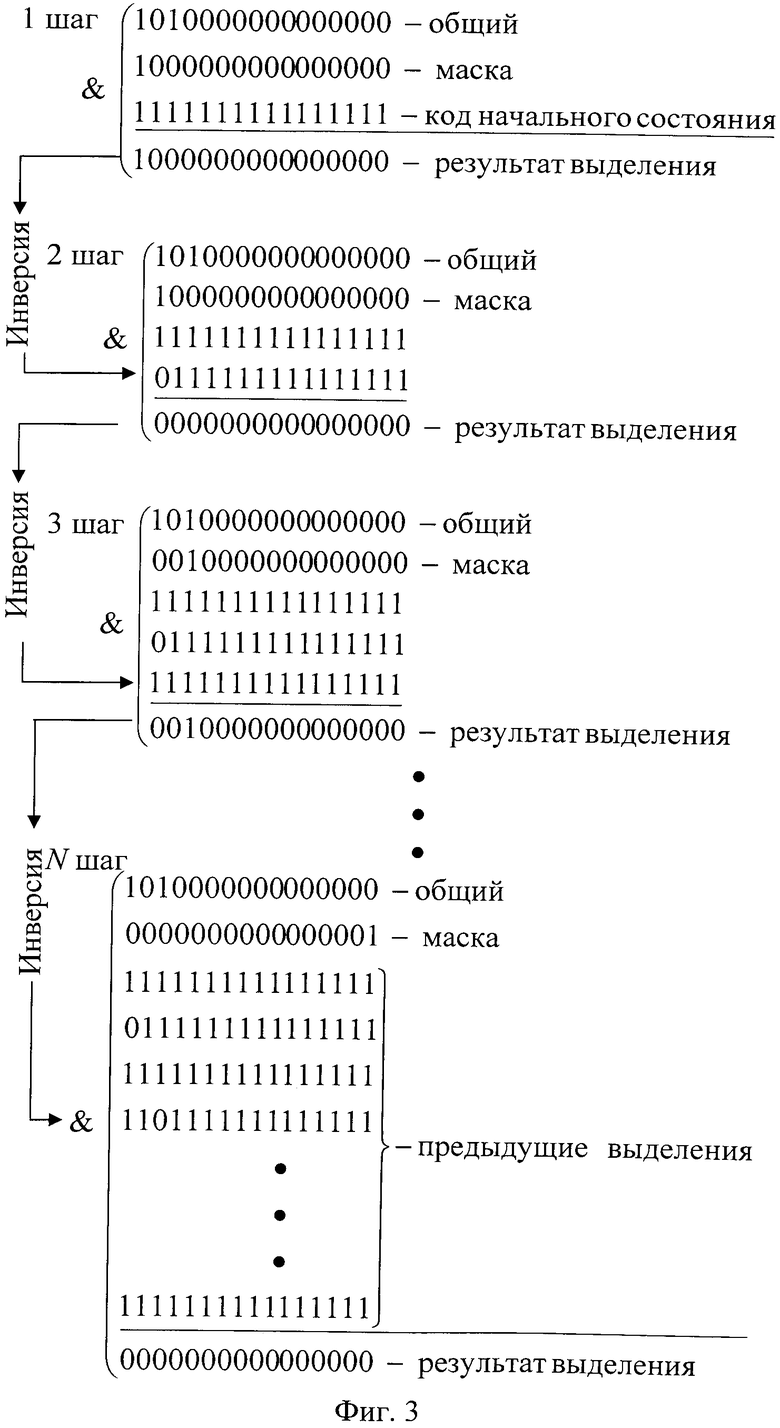
Для решения данной задачи в способе автоматического контроля перемещения складских грузовых платформ, сводящемся к обработке информации результатов контроля в N контрольных точках, разбивают складское помещение на зоны размещения (адресования) складских грузовых платформ, в этих зонах задают контрольные точки присутствия складских грузовых платформ, которые последовательно нумеруют, масштабируют токи от каждой контрольной точки, масштабированные токи от каждой контрольной точки суммируют в точке суммирования и передают через канал связи в орган обработки информации, где преобразуют данный ток в пропорциональное напряжение, из которого вычитается напряжение пропорциональное суммарным координатам уже размещенных в помещении склада складских грузовых платформ, и по величине результирующего напряжения идентифицируют общие координаты l∑ контрольных точек, которые определяются положением перемещаемых складских грузовых платформ в линейной системе координат, переходят от линейной системы координат к двухкоординатной системе, причем при масштабировании токов коэффициент их масштабирования от каждой контрольной точки i выбирают пропорционально 2i, а для перехода от линейной системы координат к двухкоординатной системе фиксируют кодовое слово k∑ для общих координат l∑ окончательного размещения в помещении склада перемещаемых платформ и суммируют его с суммарными кодовыми словами координат, а при отгрузке вычитают из суммарных кодовых слов координат ранее окончательно размещенных складских грузовых платформ и далее выделяют разряды кодового слова k∑ соответствующего общим координатам l∑ положения перемещаемых складских грузовых платформ в линейной системе координат, причем составляющие в виде двоичных одноединичных кодовых слов ki соответствующие координатам каждой отдельной платформы lki, формируют путем последовательной поразрядной конъюнкции двоичного кодового слова k∑ соответствующего общим координатам l∑ положения перемещаемых складских грузовых платформ в линейной системе координат с двоичным одноединичным кодовым словом-маской и инверсией предыдуще выделенных двоичных одноединичных кодовых слов (начальный инверсный код имеет вид 


а абсцисса
если же остаток о после деления

а абсцисса
где lki - координата в линейной системе координат i точки контроля (порядковый номер точки контроля), n - количество зон размещения складских грузовых платформ по оси абсцисс в контролируемом помещении, [] - целая часть результата деления, ο - остаток результата деления.
Устройство автоматического контроля перемещения складских грузовых платформ содержит блок N дискретных датчиков релейного типа, размещенных в N контрольных точках и орган обработки информационных сигналов, блок суммирования масштабированных токов, который состоит из N резисторов, причем первый конец i-ого резистора подключен к i-ому входу блока суммирования токов, а вторые концы всех резисторов блока суммирования токов объединены и подключены к его выходу, причем i-й вход блока суммирования масштабированных токов подключен к выходу i-ого датчика, а выход блока суммирования масштабированных токов соединен через канал связи с входом орган обработки информации, который содержит блок преобразования тока в напряжение, вычитатель, АЦП, вычислитель, блок памяти, ЦАП, пороговый элемент, R-S триггер, одновибратор, и два элемента задержки сигнала, причем вход органа обработки информации соединен с входом блока преобразования тока в напряжение, выход которого к соединен с первым входом вычитателя, ко второму входу которого подключен выход ЦАП, а выход к входу АЦП, информационные выходы которого подключены к первым информационным входам вычислителя, первые управляющие выходы которого являются выходами управления платформой всего устройства, а первые и вторые информационные выходы соединены с первыми и вторыми информационными входами блока памяти соответственно, третьи информационные выходы вычислителя являются первыми информационными входами мнемосхемы склада, ко вторым информационным входам которого подключены первые информационные выходы блока памяти, вторые информационные выходы которого подключены к информационным входам ЦАП и вторым информационным входам вычислителя, третьи информационные входы которого подключены к выходам пульта оператора, выход вычитателя подключен через пороговый элемент, S-вход R-S триггера, одновибратор и первый элемент задержки сигнала к входу стробирования АЦП, который соединен с R-входом R-S триггера и через второй элемент задержки сигнала с входом стробирования вычислителя, а второй и третий управляющие выходы последнего соединены с соответствующими входами "ЗАПИСЬ" блока памяти, причем в блоке суммирования масштабированных токов величина i-ого резистора равна
где i - порядковый номер точки контроля (i=0,.., N-1), Ri - i-ый резистор блока суммирования масштабированных токов, R0 - нулевой резистор блока суммирования масштабированных токов.
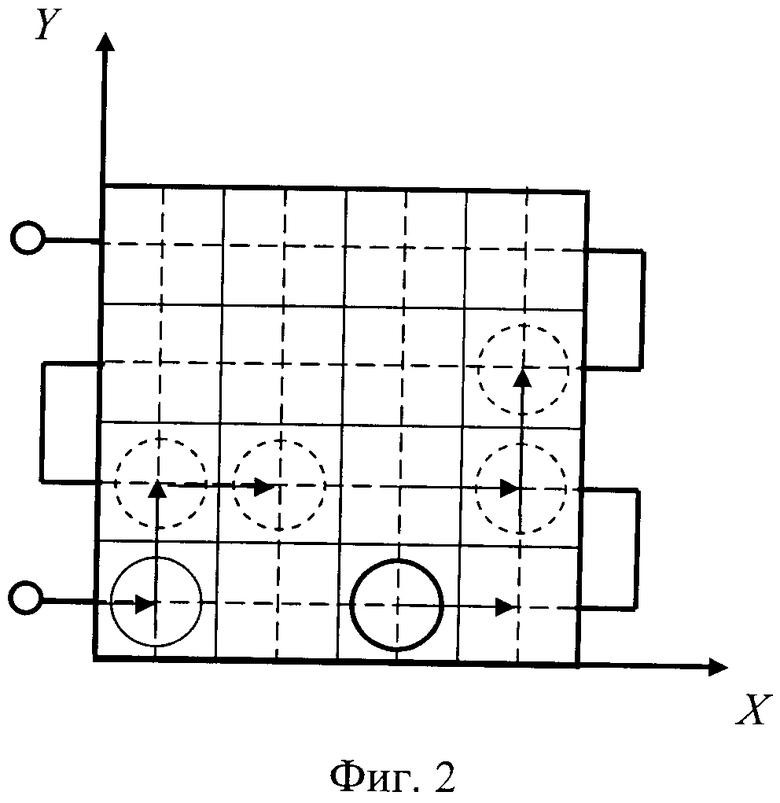
На фиг. 1 представлена принципиальная блок-схема устройства, где показана один из возможных вариантов реализации предлагаемого способа, где дискретные датчики положения выполнены на герконах Д0, Д1, ..., ДN-1 и смонтированы на местах адресования, которые срабатывают от постоянных магнитов, установленных на складских грузовых платформах. На фиг. 2. пример перемещения складских грузовых платформ в системе координат Х-Y, а на фиг. 3 последовательность выделения любого разряда кодового слова, соответствующего каждой конкретной перемещающейся складской грузовой платформы в виде двоичных одноединичных кодовых слов.
Устройство предназначено для контроля складского помещения, где выделены зоны размещения (адресования) складских грузовых платформ (фиг. 2), и содержит блок N дискретных датчиков положения 1 (релейного типа), которые определяют контрольные точки присутствия складских грузовых платформ в соответствующей зоне размещения в контролируемом помещении, блок масштабирования и суммирования токов 2, канал связи 3, орган обработки информации 4. Орган обработки информации 4, в свою очередь, включает блок преобразования тока в напряжение 5, вычитатель 6, аналого-цифровой преобразователь (АЦП) 7, вычислитель 8, блок памяти 9, состоящий из двух подблоков (линейной системе координат 9.1 и двухкоординатной системе 9.2), цифроаналоговый преобразователь (ЦАП) 10, пороговый элемент 11, RS-триггер 12, одновибратор 13, два элемента задержки сигнала 14, 15, информационные выходы вычислителя 8 к мнемосхеме склада 16, вход вычислителя 8 от пульта оператора 17 и выход управления 18. Вычислитель 8 может быть реализован в виде компьютера, для которого пульт оператора 17 является клавиатурой, а мнемосхема склада отображается на его дисплеи.
Входы блока суммирования масштабированных токов 2 подключены к выходам соответствующего датчика блока дискретных датчиков 1 релейного типа, а выход к входу канала связи 3. Выход канала связи 3 подключен к входу органа обработки информации 4. В органе обработки информации 4 его вход соединен с входом блока преобразования тока в напряжение 5. Выход блока преобразования тока в напряжение 5 соединен с первым входом вычитателя 6, второй вход которого соединен с выходом ЦАП 10. Выход вычитателя 6 соединен с входом АЦП 7, информационные выходы которого подключены к первым информационным входам вычислителя 8. Первые и вторые информационные выходы вычислителя 8 соединены соответственно с первыми и вторыми информационными входами блока памяти 9, а третьи информационные выходы вычислителя 8 являются первыми информационными входами мнемосхемы склада 16, вторыми информационными входами которой являются первые информационные выходы блока памяти 9, вторые информационные выходы которого соединены со вторыми информационными входами вычислителя 8 и информационными входами ЦАП 10. Первый выход управления вычислителя 8 подключен к выходу органа обработки сигнала 4 и к выходу устройства автоматического контроля перемещения складских грузовых платформ, а второй и третий выходы управления вычислителя 8 подключены к соответствующим входам "ЗАПИСЬ" блока памяти 9. Выход вычитателя 6 подключен также через последовательно соединенные пороговый элемент 11, S-вход RS-триггера 12, одновибратор 13 и первый элемент задержки 14 к входу стробирования АЦП 7. Вход стробирования АЦП 7 соединен с R-входом RS-триггера 12 и через второй элемент задержки 15 с входом синхронизации вычислителя 8.
Блок дискретных датчиков 1 релейного типа может быть реализован в виде герконовых датчиков положения, которые смонтированы на местах адресования, а постоянный магнит - на складских грузовых платформах. Блок преобразования тока в напряжение 5 может быть реализован в простейшем случае в виде резистора нагрузки для канала связи 3, приведенном на фиг. 1, а канал связи 3 в виде токовой витой пары.
Предложенное устройство работает следующим образом.
В исходном состоянии нумеруют последовательно датчики блока дискретных датчиков (герконовые датчики положения смонтированы на местах адресования, а постоянный магнит на складской грузовой платформе).
В исходном состоянии блок памяти 9 обнулен и на выходе цифроаналогового преобразователя установлено напряжение "0 В". В вычислитель 8 пультом оператора 17 (клавиатура компьютера) введены координаты места адресования и жесткая логическая схема управления перемещением платформы от текущего места адресования к следующему.
При включении устройства и поступлении в помещение склада складских грузовых платформ в общей точке суммирования S блока 2 (фиг. 1) суммируются масштабированные токи от датчиков Д0, Д1, ..., ДN-1, величина каждого из которых пропорциональна весу цифрового двоичного разряда, причем должны суммироваться с коэффициентами, равными нулю или единице, т.е. только токи разрядов, значения которых равны 1. Для этого в блоке суммирования масштабированных токов 2 формируется суммарный ток, соответствующий цифровому двоичному коду k∑ в виде Д0Д1Д2Д3…ДN-1, в котором i-й бит равен единице, если соответствующий дискретный датчик Дi сработал. Для каждого i-го разряда выбирается вес вдвое больше, чем вес (i-1)-го. Данный код преобразуется в точке суммирования S в аналоговую величину тока IВЫХ, которая определяется соотношением
где E - напряжение, соответствующее весу младшего разряда; k - номер разряда входного кода N, k-i; dK - значение k-го разряда (ноль или единица); N - количество разрядов входного кода.
Таким образом, в блоке масштабирования сопротивления резисторов выбирают 
Так например, на начальном этапе функционирования устройства, когда еще отсутствуют установленные в помещении склада платформы в конечных координатах места адресования, поскольку по помещению склада перемещается одна складская грузовая платформа, суммарный ток будет равен
Суммарный ток I∑ по однопроводному каналу связи 3 поступает в орган обработки информации 4, где в блоке преобразования тока в напряжение 5 преобразуют в пропорциональное напряжение U∑.
По величине результирующего напряжения ΔU∑ при условии, что шаг квантования аналого-цифровой преобразователь 7 равен ΔU=1 Ом 
Таким образом, в устройстве по однопроводному каналу связи 3 поступает информация о сумме координат складских грузовых платформ в виде кода k∑ на выходе АЦП 7. При получении информации от дискретных датчиков места адресования, размещенных в N контрольных точках на входах вычислителя 8 формируется номер в линейной системы координат для принятия решения о текущей координате каждой из одновременно перемещающихся складских грузовых платформ в виде двоичного одноединичного кодового слова. Причем для выделения i разряда кодового слова, соответствующего каждой конкретной перемещающейся складской грузовой платформы, в виде двоичных одноединичных кодовых слов ki используется последовательность поразрядных конъюнкций кода, соответствующего сумме координат складских грузовых платформ, инверсией предыдуще выделенных двоичных одноединичных кодовых слов (начальный инверсный код имеет вид 
Далее в вычислителе 8 осуществляется переход от выделенных координат конкретной перемещающейся складской грузовой платформы в линейной системе координат к двухкоординатной системе с осью абсцисс Х и осью ординат Y, абсцисса по следующему правилу.
Первоначально вычисляют отношение lki/n, где линейная координата lki, соответствующая коду ki, и если остаток о после деления lki/n равен 0 (ο=0), то ордината для каждой lki-й перемещаемой складской грузовой платформы Yk равна
а абсцисса
если же остаток ο после деления

а абсцисса
где lki - координата в линейной системе координат (порядковый номер точки контроля), n - количество зон размещения складских грузовых платформ по оси абцисс в контролируемом помещении, [] - целая часть результата деления, ο - остаток результата деления.
При достижении складской грузовой платформой координаты конечного ее размещения, т.е. при совпадении текущей координаты платформы с заданной в вычислителе 8 ее конечной координатой перемещения по помещению склада формируется от вычислителя 8 сигналы по входам "ЗАПИСЬ" блока памяти 9, в который заносится координата (как в линейной 9.1, так и двухкоординатной системе 9.2) конечного размещения платформы, где она и накапливается. Накопленная в блоке памяти 9.1 информация используется для последующих расчетов в вычислителе 8 при формировании алгоритма управления перемещением очередной складской грузовой платформы по цепи поставки от текущего места адресования к следующему в реальном времени. Кроме этого, суммарные данные о линейных координатах конечного размещения складских грузовых платформ в помещении склада с выходов блока памяти 9.1 преобразуются в цифроаналоговом преобразователе 10 в суммарное напряжение. Полученное в цифроаналоговом преобразователе 10 суммарное напряжение вычитается в вычитателе 6 из напряжения, полученного с выхода преобразователя тока в напряжение 5, т.е. на выходе вычитателя 6 формируется напряжение, пропорциональное лишь коду перемещающихся по складу складских грузовых платформ.
Таким образом, в вычислителе 8 определяется информация в двухкоординатной системе о положении складских грузовых платформ для формирования мнемосхемы склада в реальном времени, с учетом как перемещающейся к заданной зоне адресации складской грузовой платформы (на выходе вычислителя 8), так и складских грузовых платформ, размещенных в зоне конечной адресации, накапливаемой в блоке памяти 9.2. Кроме этого, при полном заполнении помещения склада на выходе блока памяти 9.2 формируется сигнал об этом. Данная информация передается на мнемосхему склада (в дисплей компьютера) по информационным выходам 16.
С учетом полученной мнемосхемы склада в вычислителе 8 на основании внесенной в него жесткой логической схемы управления перемещением платформы по управляющему выходу 18 формируется алгоритм управления перемещением очередной складской грузовой платформы по цепи поставки от текущего места адресования к следующему в реальном времени.
При переходе к этапу отгрузки платформ функционирование предлагаемого устройства осуществляется аналогично, с той только разницей, что при старте алгоритма на отгрузку складской грузовой платформы в вычислителе 8 из суммарной координаты вычитается начальная координата (соответственно линейная и двухкоординатная) отгружаемой складской грузовой платформы.
Используемая литература:
Финкенцеллер К. RFID-технологии. Справочное пособие/К. Финкенцеллер; пер. с нем. Сойунханова Н.М. - М.: Додэка-XXI, 2010. - 496 с.
Группа изобретений относится к области электротехники. Технический результат заключается в увеличении производительности и надежности грузовых платформ за счет локализации объектов в режиме реального времени внутри складских сооружений и за счет увеличения количества одновременно отслеживаемых на складе грузовых платформ. Для этого предложены способ и устройство автоматического контроля перемещения складских грузовых платформ, в которых суть сводится к обработке информации результатов контроля в N контрольных точках, при этом разбивают складское помещение на зоны размещения складских грузовых платформ, в этих зонах задают контрольные точки присутствия складских грузовых платформ, которые последовательно нумеруют, масштабируют токи от каждой контрольной точки, масштабированные токи от каждой контрольной точки суммируют в точке суммирования и передают через канал связи в орган обработки информации, где преобразуют данный ток в пропорциональное напряжение, из которого вычитается напряжение, пропорциональное суммарным координатам уже размещенных в помещении склада складских грузовых платформ, и по величине напряжения идентифицируют координаты i положения складских грузовых платформ. 2 н.п. ф-лы, 3 ил.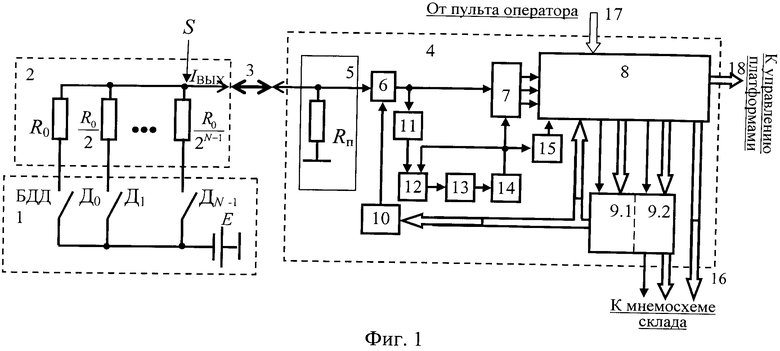
1. Способ автоматического контроля перемещения складских грузовых платформ, сводящийся к обработке информации результатов контроля в N контрольных точках, разбивают складское помещение на зоны размещения (адресования) складских грузовых платформ, в этих зонах задают контрольные точки присутствия складских грузовых платформ, которые последовательно нумеруют, масштабируют токи от каждой контрольной точки, масштабированные токи от каждой контрольной точки суммируют в точке суммирования и передают через канал связи в орган обработки информации, где преобразуют данный ток в пропорциональное напряжение, из которого вычитается напряжение, пропорциональное суммарным координатам уже размещенных в помещении склада складских грузовых платформ, и по величине результирующего напряжения идентифицируют общие координаты l∑ контрольных точек, которые определяются положением перемещаемых складских грузовых платформ в линейной системе координат, переходят от линейной системы координат к двухкоординатной системе, отличающийся тем, что при масштабировании токов коэффициент их масштабирования от каждой контрольной точки i выбирают пропорционально 2i, а для перехода от линейной системы координат к двухкоординатной системе фиксируют кодовое слово k∑ для общих координат l∑ окончательного размещения в помещении склада перемещаемых платформ и суммируют его с суммарными кодовыми словами координат, а при отгрузке вычитают из суммарных кодовых слов координат ранее окончательно размещенных складских грузовых платформ и далее выделяют разряды кодового слова k∑ соответствующего общим координатам l∑ положения перемещаемых складских грузовых платформ в линейной системе координат, причем составляющие в виде двоичных одноединичных кодовых слов ki, соответствующие координатам каждой отдельной платформы lki, формируют путем последовательной поразрядной конъюнкции двоичного кодового слова k∑, соответствующего общим координатам l∑ положения перемещаемых складских грузовых платформ в линейной системе координат с двоичным одноединичным кодовым словом-маской и инверсией предыдуще выделенных двоичных одноединичных кодовых слов (начальный инверсный код имеет вид 


а абсцисса
если же остаток ο после деления

а абсцисса
где lki - координата в линейной системе координат i точки контроля (порядковый номер точки контроля), n - количество зон размещения складских грузовых платформ по оси абсцисс в контролируемом помещении, [] - целая часть результата деления, ο - остаток результата деления.
2. Устройство автоматического контроля перемещения складских грузовых платформ, содержащее блок N дискретных датчиков релейного типа, размещенных в N контрольных точках и орган обработки информационных сигналов, блок суммирования масштабированных токов, который состоит из N резисторов, причем первый конец i-го резистора подключен к i-му входу блока суммирования токов, а вторые концы всех резисторов блока суммирования токов объединены и подключены к его выходу, причем i-й вход блока суммирования масштабированных токов подключен к выходу i-го датчика, а выход блока суммирования масштабированных токов соединен через канал связи с входом орган обработки информации, который содержит блок преобразования тока в напряжение, вычитатель, АЦП, вычислитель, блок памяти, ЦАП, пороговый элемент, R-S триггер, одновибратор, и два элемента задержки сигнала, причем вход органа обработки информации соединен с входом блока преобразования тока в напряжение, выход которого соединен с первым входом вычитателя, ко второму входу которого подключен выход ЦАП, а выход к входу АЦП, информационные выходы которого подключены к первым информационным входам вычислителя, первые управляющие выходы которого являются выходами управления платформой всего устройства, а первые и вторые информационные выходы соединены с первыми и вторыми информационными входами блока памяти соответственно, третьи информационные выходы вычислителя являются первыми информационными входами мнемосхемы склада, ко вторым информационным входам которого подключены первые информационные выходы блока памяти, вторые информационные выходы которого подключены к информационным входам ЦАП и вторым информационным входам вычислителя, третьи информационные входы которого подключены к выходам пульта оператора, выход вычитателя подключен через пороговый элемент, S-вход R-S триггера, одновибратор и первый элемент задержки сигнала - к входу стробирования АЦП, который соединен с R-входом R-S триггера и через второй элемент задержки сигнала с входом стробирования вычислителя, а второй и третий управляющие выходы последнего соединены с соответствующими входами "ЗАПИСЬ" блока памяти, отличающееся тем, что в блоке суммирования масштабированных токов величина i-го резистора равна
где i - порядковый номер точки контроля (i=0,.., N-1), Ri - i-ый резистор блока суммирования масштабированных токов, R0 - нулевой резистор блока суммирования масштабированных токов.
| СПОСОБ АВТОМАТИЧЕСКОГО КОНТРОЛЯ ПЕРЕМЕЩЕНИЯ СКЛАДСКИХ ГРУЗОВЫХ ПЛАТФОРМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2470316C1 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТОМ МНОГОЯРУСНОГО СКЛАДА ВЫСОКОПЛОТНОГО ХРАНЕНИЯ ЯЧЕЕК С ГРУЗОМ | 2006 |
|
RU2329191C2 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ИДЕНТИФИКАЦИИ И СКЛАДИРОВАНИЯ КОНТЕЙНЕРОВ, ОСНАЩЕННЫХ РАДИОЧАСТОТНЫМИ ИДЕНТИФИКАЦИОННЫМИ МЕТКАМИ, НА СТАЦИОНАРНЫХ И ПОДВИЖНЫХ СКЛАДАХ | 2007 |
|
RU2343100C1 |
| US 4690066 A1, 01.09.1987. | |||

