Данное предлагаемое изобретение относится к способам автоматизированного контроля запыленности собственной внешней атмосферы (далее СВА) космического аппарата (далее КА) при тепловакуумных испытаниях (далее ТВИ) и емкостным аспирационным системам с емкостными аспирационными датчиками для их осуществления.
Основной задачей ТВИ по техническому заданию является проверка работоспособности всех систем КА и чистоты всех его поверхностей и полостей, в том числе замкнутых полостей. Данные испытания должны проводиться штатно перед отправкой каждого КА на космодром.
В дополнение к автоматизированному контролю запыленности СВА КА заявляемый способ и емкостная аспирационная система с емкостными аспирационными датчиками позволяют также определять средние за время ТВИ плотность потока массы и концентрацию (массовую долю) пыли, взвешенной в СВА КА, проводить микрофотографический анализ отобранной пыли.
Известно, что на космической орбите пыль, доставленная с Земли, и загрязнения от самого КА (летучие компоненты красок, герметик, клеев, теплопроводных паст, их шелушение, образование пузырей, отслоение от корпуса, нитевидные фрагменты и др.) загрязняют, осаждаясь и конденсируясь на холодных поверхностях, оптику приборов, зеркала, солнечные батареи, искажают показания датчиков, изменяют характеристики экранно-вакуумной теплоизоляции (ЭВТИ) и т.д. [1-2].
На Земле размеры частиц и капель, которые витают в воздухе помещений и в вакуумных камерах с открытыми люками, принадлежат интервалу, который охватывает четыре порядка величин ds≈(10-2-102) мкм [3].
Данное предлагаемое изобретение, в котором объединены воедино несколько разных физических процессов - аспирация, фильтрация, генерация и регистрация электрических колебаний, взвешивание и т.д., пригодно и для других применений. По мнению заявителей, предлагаемое изобретение может быть использовано в авиационной, электронно-вакуумной, химической, пищевой промышленности, порошковой металлургии и иных областях науки и техники, связанных с мониторингом, контролем и измерением изменяющихся во времени параметров двухфазных потоков.
Известен способ измерения концентрации веществ в средах, на который выдан патент №2275625 [4]. Данный способ по патенту №2275625 принимается в качестве прототипа.
Способ-прототип содержит и базируется на использовании параллельного колебательного контура с регулируемой индуктивностью (регулируемой емкостью) и двух ручных переключателей, с помощью которых оператор поочередно подключает в электрическую цепь колебательного контура емкостные (один подключается, другой отключается) либо индуктивные (один подключается, другой отключается) датчики, генератора ВЧ синусоидального напряжения, сопротивления и ноль-индикатора.
Способ-прототип включает в себя следующие операции:
- подключение с помощью переключателей «первого» датчика (емкостного или индуктивного) в электрическую цепь колебательного контура;
- размещение образца испытуемой среды с неизвестной диэлектрической проницаемостью внутри «первого» датчика, включенного в колебательный контур;
- настройка колебательного контура с «первым» датчиком, внутри которого размещен образец испытуемой среды, в резонансный режим, регистрация параметров данного резонансного режима;
- подсоединение оператором с помощью переключателей электрическую цепь колебательного контура ко «второму» датчику и одновременное отключение «первого» датчика;
- размещение эталонного образца с «эталонной» диэлектрической проницаемостью внутри «второго» датчика;
- настройка колебательного контура со «вторым» датчиком, внутри которого размещен эталонный образец, в резонансный режим; регистрация параметров данного резонансного режима;
- сравнение параметров резонансных режимов и на основании этих данных определение концентрации примесных веществ в образце испытуемой среды.
Напомним определение диэлектрической проницаемости. Диэлектрическая проницаемость - одна из важнейших физических характеристик диэлектриков. Диэлектрическая проницаемость показывает, во сколько раз уменьшается сила электростатического (кулоновского) взаимодействия электрических зарядов при переносе их из вакуума в однородный, изотропный диэлектрик, если расстояние между зарядами сохраняется неизменным.
Проведенный анализ способа-прототипа по патенту №2275625 показал, что наряду с положительными отличиями способ-прототип обладает и недостатками. Рассмотрим эти недостатки более подробно:
- в основу способа-прототипа заложено измерение и сравнение концентрации веществ в испытуемой и эталонной средах. Однако в патенте четко не прописано состояние вещества, концентрацию которого можно измерить в среде с помощью данного способа. Известно, что вещество, представляющее собой однородный вид материи, может находиться в твердом, жидком, газообразном и плазменном состоянии. В плазме, например, измерить концентрацию вещества с помощью способа-прототипа невозможно. О веществе какого состояния идет речь в способе-прототипе? На этот вопрос в патенте №2275625 нет ответа.
- при использовании способа-прототипа непременно требуется наличие эталонного образца испытуемой среды;
- способ-прототип не автоматизирован и не позволяет одновременно, а только поочередно, выполнив ручное переключение, измерять концентрации веществ в испытуемом образце и в эталонном образце;
- изготовление по способу-прототипу эталонных образцов, например жидкостных или газовых потоков, представляет собой задачу большой сложности и трудоемкости, требующей привлечения дополнительных сложных средств измерения; если используется эталон в виде твердого вещества, то состав этого вещества должен быть точно известным, что также требует привлечения дополнительных и сложных средств измерения;
- в вакуумной камере и аналогичных агрегатах в процессе их вакуумирования использование способа-прототипа не представляется возможным из-за наличия ручных переключателей;
- в представленном в способе-прототипе описании колебательные контуры не имеют заземленных защитных экранов, отсутствие последних снижает точность измерения и усложняет настройку колебательных контуров;
- в способе-прототипе не прописано четко понятие концентрации, измеряемой с помощью данного способа.
В механике аэрозолей и в двухфазных течениях, а именно такие течения имеют место в вакуумной камере при ТВИ КА, существуют следующие понятия концентрации - счетная, объемная, массовая (весовая). Счетная концентрация частиц определяет число частиц в единице объема несущей среды (газа). Объемная концентрация частиц характеризует общий объем частиц в единице объема несущей среды (газа). Массовая (весовая) концентрация частиц определяется как масса (вес) частиц в единице объема несущей среды (газа).
Небезынтересно отметить, что в природе и технике существуют множество различных двухфазных моно- и полидисперсных течений газа с частицами. Примером двухфазных течений являются, например, продукты сгорания + конденсированные частицы выхлопного факела ракетного двигателя, выхлопные газы + частицы сажи автомобиля, воздух + земная пыль, воздух + мучная пыль и т.д. [3, 5-6].
Из вышесказанного следует, что способ-прототип для использования в ТВИ КА является непригодным.
Техническим результатом заявляемой группы изобретений «Способ автоматизированного контроля запыленности собственной внешней атмосферы космического аппарата при тепловакуумных испытаниях и емкостная аспирационная система с емкостными аспирационными датчиками для его осуществления» является постоянный автоматизированный контроль запыленности СВА при ТВИ КА с регистрацией и записью результатов контроля запыленности в многоканальный модульный блок электроники с измерительными приборами, отказ за ненадобностью от эталонных образцов, повышение качества контроля, достоверности и точности измерения запыленности СВА вблизи наружных поверхностей и в замкнутых полостях КА, обшитого матами ЭВТИ, удаление посредством аспирации запыленной атмосферы из замкнутых полостей, получение данных по осредненным за время ТВИ массовой концентрации и плотности потока массы пыли, взвешенной в воздухе как собственной внешней, так и внутренней замкнутой атмосферы КА, проведение микрофотографического анализа отобранной пыли.
Для достижения указанного технического результата в заявляемом способе автоматизированного контроля запыленности СВА КА при ТВИ, включающем размещение космического аппарата в вакуумной камере, конфигурацию и монтажную сборку емкостной аспирационный системы, оснащение ее емкостными аспирационными датчиками с фильтрами известной массы и проходного сечения, многоканальным модульным блоком электроники с измерительными приборами и таймером, электронными расходомерами, вакуумной линией откачки с мобильными вакуумными насосами, закрепление емкостных аспирационных датчиков с электронными расходомерами в контрольных точках космического аппарата, присоединение емкостных аспирационных датчиков посредством вакуумной линии откачки к мобильным вакуумным насосам, а электронных расходомеров - и к вакуумной линии откачки с мобильными вакуумными насосами, и к многоканальному модульному блоку электроники с измерительными приборами, подключение носовых и кормовых лопастно-цилиндрических конденсаторов, смонтированных в емкостных аспирационных датчиках, к экранированным, заземленным колебательным контурам многоканального модульного блока электроники с измерительными приборами, настройку колебательных контуров в резонансные режимы и вывод резонансных кривых на дисплеи измерительных приборов многоканального модульного блока электроники, закрытие крышки вакуумной камеры, вакуумирование вакуумной камеры начинается по команде от таймера одновременно с процессом всасывания запыленных струй воздуха в контрольных точках космического аппарата в заборные полости емкостных аспирационных датчиков, где запыленный воздух изменяет диэлектрическую проницаемость и емкость носовых лопастно-цилиндрических конденсаторов, вследствие чего изменяются резонансные кривые колебательных контуров и отображения резонансных кривых на дисплеях измерительных приборов многоканального модульного блока электроники, далее всосанный запыленный воздух фильтруется с осаждением пыли на пористом фильтре и отфильтрованным проходит в кормовые лопастно-цилиндрические конденсаторы, не изменяя диэлектрическую проницаемость и емкость этих кормовых лопастно-цилиндрических конденсаторов, вследствие чего не изменяются резонансные режимы колебательных контуров и отображения резонансных кривых на дисплеях измерительных приборов многоканального модульного блока электроники, далее воздух проходит аэродинамически спрофилированные конфузоры емкостных аспирационных датчиков, электронные расходомеры, постоянно регистрирующие расход отфильтрованного воздуха, и по вакуумной линии откачки и мобильным вакуумным насосам сбрасывается в атмосферу, а по окончании тепловакуумных испытаний, анализируя записанную измерительными приборами многоканального модульного блока электроники информацию, решается вопрос об остаточной запыленности или чистоте собственной внешней атмосферы космического аппарата, а разобрав емкостные аспирационные датчики и измерив привес пыли на фильтрах с известным проходным сечением, используя данные по суммарному объемному расходу отсосанного воздуха, времени вакуумирования вакуумной камеры, определяются средние за время тепловакуумных испытаний массовая концентрация пыли и плотность потока массы пыли, взвешенной в контрольных точках собственной внешней атмосферы космического аппарата, проводится микрофотографический анализ пыли.
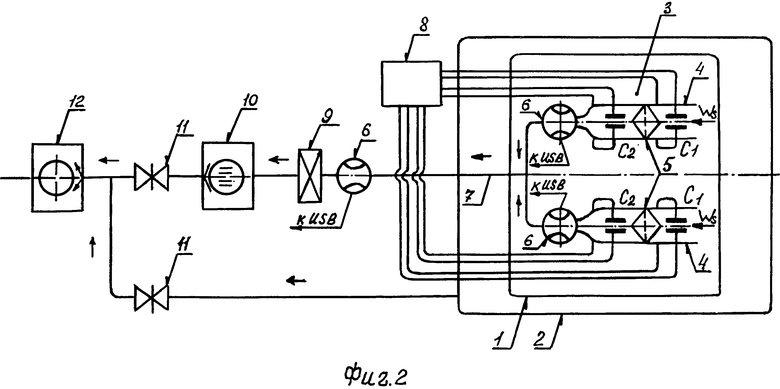
Предлагаемый способ поясняется чертежами, где на фиг. 1 изображен КА, помещенный в вакуумную камеру, на фиг. 2 - принципиальная схема емкостной аспирационной системы, выполненная по заявляемому способу; на фиг. 3 - принципиальная схема многоканального модульного блока электроники с измерительными приборами; на фиг. 4 - конструкция принадлежащего емкостной аспирационной системе емкостного аспирационного датчика.
Следует отметить, что емкостные аспирационные датчики наиболее эффективно всасывают запыленный воздух в вакуумной камере из замкнутых полостей и вблизи наружных поверхностей КА в период образования низкого вакуума, соответствующего давлению рв≥1 мм рт.ст.
На фиг. 1 космический аппарат обозначен цифрой 1, вакуумная камера - цифрой 2; стационарные вакуумные насосы, создающие вакуум в вакуумной камере 2, на фиг. 1 условно не показаны.
Основными функционально связанными между собой устройствами и элементами емкостной аспирационной системы 3, выполненной по заявляемому способу (см. фиг. 2) являются: идентичные емкостные аспирационные датчики 4 с фильтрами 5, датчики 4 крепятся в контрольных точках КА в произвольном положении на «липучках» в замкнутых полостях и на поверхности КА (на фиг. 2 КА условно обозначен контуром 1, а вакуумная камера - контуром 2), электронные расходомеры 6, вакуумная линия откачки 7, многоканальный модульный блок электроники с измерительными приборами и таймером 8, внешние вакуумный затвор 9, мобильный турбомолекулярный насос 10, вакуумные вентили 11, мобильный форвакуумный насос 12.
Напомним, что форвакуумные насосы создают разрежение до сотых долей миллиметра ртутного столба, турбомолекулярные насосы - до 10-8 Па=10-8 Η·м-2=10-8кгс·м-1·с-2; вакуумные затворы в вакуумных системах выполняют функцию запорного устройства, а вакуумные вентили осуществляют герметичное перекрытие вакуумных магистралей.
Многоканальный модульный блок электроники с измерительными приборами и таймером 8 емкостной аспирационной системы (см. фиг. 3) включает в себя источник питания 13, многоканальный высокочастотный генератор 14, последовательные колебательные контуры 15 и 16 регистрации протока соответственно запыленной и чистой воздушной струи (контуры 15 и 16 принадлежат одному емкостному аспирационному датчику 4; число датчиков 4 может быть Ν≥1), многоканальный алфавитно-цифровой преобразователь (АЦП) 17, многоканальный электронный контроллер 18 с информационными портами USB, обрабатывающий информацию персональный компьютер 19.
Напомним, что АЦП - это устройство, преобразующее входной аналоговый сигнал в дискретный код (цифровой сигнал). Контроллер - специальное техническое устройство, предназначенное для управления другими устройствами посредством получения информации в виде цифровых данных или аналого-дискретного сигнала от внешнего устройства, преобразования этой информации по специальному алгоритму и выдачи управляющего воздействия в виде цифрового или аналого-дискретного сигнала.
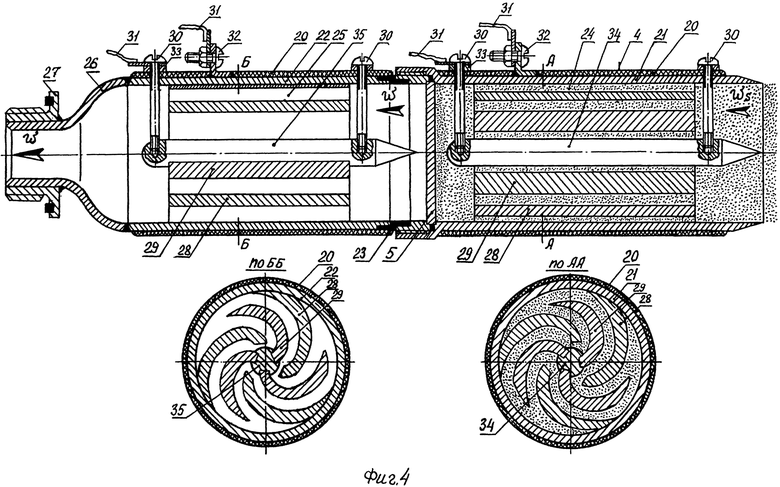
Емкостной аспирационной датчик 4 (см. фиг. 4) является входным всасывающим устройством данной аспирационной системы 3. Датчик 4 содержит разборный с изоляционным покрытием корпус 20, состоящий из двух цилиндрических обкладок 21 и 22, которые состыкованы между собой с помощью резьбовой изоляционной втулки 23 (на фиг. 4 резьба не показана). В цилиндрических обкладках 21 и 22 смонтированы два идентичных, носовой 24 и кормовой 25, лопастно-цилиндрических конденсатора, которые электрически изолированы друг от друга, включены соответственно в идентичные колебательные контуры 15 и 16 (см. фиг. 3) и разделены между собой пористым фильтром 5. Выходное сечение цилиндрической обкладки 22 датчика 4 состыковано с аэродинамически спрофилированным конфузором 26. Выходной патрубок 27 конфузора 26 состыкован с электронным расходомером 6 (см. фиг. 2) и с вакуумной линией откачки 7 (см. фиг. 2), а линия откачки 7 состыкована с мобильными вакуумными насосами 10 и 12 (см. фиг. 2). Взаимное расположение лопастных обкладок 28 и 29 друг относительно друга в носовом и кормовом лопастно-цилиндрических конденсаторах 24 и 25 осуществляется с помощью изолированных винтов 30. Коаксиальные кабели 31, соединяющие носовой и кормовой лопастно-цилиндрические конденсаторы 24 и 25 с колебательными контурами 15 и 16 (см. фиг. 2), крепятся к разъемам 32 и 33. Лопастные обкладки 28 скреплены с цилиндрическими обкладками 21 и 22, а лопастные обкладки 29 закреплены на аэродинамических коаксиальных сердечниках 34 и 35. Отметим, что между обкладками 28 и 29 идентичных носового и кормового лопастно-цилиндрических конденсаторов 24 и 25 предусмотрен увеличенный зазор для максимализации расхода запыленного воздуха, всасываемого в полости аспирационных датчиков 4 и уменьшения гидравлического сопротивления во входных сечениях этих полостей. К слову сказать, всасываемый расход запыленного воздуха зависит от производительности мобильных вакуумных насосов 10 и 12.
Работает емкостная аспирационная система, выполненная по заявляемому способу (см. фиг. 1-4), следующим образом. Работу емкостной аспирационной системы 3 рассмотрим на примере, когда в системе задействован один емкостной аспирационный датчик 4.
По команде от таймера (на фиг. 3 не показан) стационарные вакуумные насосы, а также мобильные насосы 10 и 12 начинают вакуумировать вакуумную камеру 2. При этом в емкостной аспирационной системе 3 вначале работает один форвакуумный насос 12, а после достижения низкого вакуума насос 12 начинает работать совместно с турбомолекулярным насосом 10. В камере 2 возникают сложные воздушные течения, начинается всасывание запыленной струи воздуха в емкостной аспирационный датчик 4, установленный в замкнутой полости КА либо закрепленный на одном из матов ЭВТИ, которыми обшит КА. Всасываемый запыленный воздух изменяет диэлектрическую проницаемость носового лопастно-цилиндрического конденсатора 24 и, соответственно, увеличивает емкость этого конденсатора, смонтированного в емкостном аспирационном датчике 4. Изменение емкости носового лопастно-цилиндрического конденсатора 24 выводит из резонансного режима колебательный контур 15 (см. фиг. 3), в который включен носовой лопастно-цилиндрический конденсатор 24, при этом изменяется информация на дисплеях многоканальных измерительных приборов 17, 18, 19 модульного блока электроники 8 (см. фиг. 3). Далее всасываемая запыленная струя воздуха, преобразованная в носовом лопастно-цилиндрическом конденсаторе 24 в многоструйный поток, фильтруется на пористом фильтре 5 с осаждением пыли на этом фильтре. После фильтра 5 отфильтрованный воздушный поток проходит кормовой лопастно-цилиндрических конденсатор 25, не изменяя емкости этого кормового лопастно-цилиндрического конденсатора. Посему сохраняется резонансный режим колебательного контура 16 (см. фиг. 3), к которому подключен кормовой лопастно-цилиндрический конденсатор 25, и не изменяется информация на дисплеях многоканальных измерительных приборов 17, 18, 19 модульного блока электроники 8 (см. фиг. 3). Далее воздушный поток проходит конфузор 26, электронный расходомер 6 (см. фиг. 2), постоянно регистрирующий расход отфильтрованного воздуха, и по вакуумной линии откачки 7 (см. фиг. 2) через мобильные вакуумные насосы 10, 12 сбрасывается в воздушное пространство испытательного центра или лаборатории.
Теперь небольшое отступление. Расчетные оценки емкости лопастно-цилиндрических конденсаторов 24 и 25, изображенных на фиг. 4, показали, что емкости этих конденсаторов равны примерно С≈200 пФ=200·10-12 Ф.
Автоматизированный контроль запыленности для достижения приемлемой точности целесообразно проводить, используя высокочастотные резонансные частоты колебания тока порядка 1 МГц и более в последовательных (или параллельных) колебательных контурах, каждый из которых содержит конденсатор, катушку индуктивности и резистор. Так как катушка индуктивности, конденсатор и соединительные провода обладают активным сопротивлением, то для достижения максимальной добротности от резистора можно отказаться.
Выбираем индуктивность катушек порядка L=0,05 мГн=0,05·10-3 Гн и по формуле Томсона рассчитываем резонансную частоту последовательных электрических колебательных контуров:
fp=1/(2π(L·С)0,5)=1/(2·3,14·(0,05·10-3·200·10-12)0,5)≈1,59·106 Гц=1,59 МГц.
Качество электрического колебательного контура обычно характеризуется его добротностью Q. Безразмерная величина Q определяет количество колебаний, которое совершит электрический ток в колебательном контуре после однократной зарядки его конденсатора, прежде чем амплитуда колебаний тока уменьшится в е=2,7 раз.
Q=1/R·(L/C)0,5=50
В этой формуле были использованы R=10 Ом; L=0,05·10-3 Гн, С=200·10-12Ф.
По окончании ТВИ КА полученные экспериментальные данные и анализ информации, отображенной и записанной измерительными приборами модульного электронного блока, позволяют:
- обсудить качественно динамику процесса изменения (уменьшения) запыленности СВА КА во время вакуумирования вакуумной камеры;
- получить информацию об остаточной штатной запыленности либо чистоте СВА КА;
- определить, разобрав емкостной аспирационный датчик и измерив привес пыли на фильтре, используя данные по проходному сечению фильтра и суммарному объемному расходу воздуха, прошедшему через этот датчик, средние за время ТВИ массовые концентрацию пыли и плотность потока массы пыли в СВА КА;
- провести микрофотографический анализ отобранной пыли.
Известно устройство контроля запыленности воздуха по патенту №2147739 [7]. Данное устройство принимается в качестве устройства-прототипа.
Устройство-прототип включает в себя воздуходувку, входной патрубок, фильтр, двустороннюю задвижку, ротаметр, редукционный клапан, датчик диэлектрической проницаемости среды с чувствительным элементом - плоскими пластинами электрического конденсатора, камеру, микропроцессорный блок, предназначенный для регистрации и запоминания поступающей информации, программируемый таймер, электродвигатель, блок питания.
Напомним, что редукционный клапан в устройстве-прототипе - это автоматически действующий пневмоклапан, поддерживающий постоянное давление воздуха на выходе из камеры.
Устройство-прототип работает следующим образом. Перед началом работы в микропроцессорный блок контроля устройства-прототипа вводятся значения предельно допустимой концентрации (ПДК) пыли для данной рабочей зоны и с помощью программируемого таймера устанавливается режим работы устройства. Далее производится настройка устройства. На двухстороннюю задвижку с ее внешней стороны устанавливается фильтр, микропроцессорный блок контроля переводят в режим настройки. С помощью воздуходувки в устройство по входному патрубку нагнетается запыленный воздух, который фильтруется на фильтре, поступает далее в ротаметр и по этому прибору определяется объемный расход отфильтрованного от пыли воздуха. Далее отфильтрованный воздух проходит между установленными в камере двумя разнесенными друг от друга на большое расстояние плоскими пластинами конденсатора, который является чувствительным элементом датчика, реагирующим на диэлектрическую проницаемость проходящего воздуха, и через редукционный клапан истекает в атмосферу. Блок оперативной памяти фиксирует с заданным шагом дискретизации в различные моменты времени величину диэлектрической проницаемости, а микропроцессор вычисляет усредненную величину диэлектрической проницаемости отфильтрованного воздуха. Вычисленная усредненная величина диэлектрической проницаемости отображает «нулевую» концентрацию пыли в воздухе и заносится в блок постоянной памяти. После такой настройки устройство-прототип переводится в режим контроля. После этого с двусторонней задвижки снимается фильтр и, используя снова эту задвижку и ротаметр, устанавливают расход запыленного воздуха, равный расходу ранее отфильтрованного чистого воздуха, измеренному при настройке устройства-прототипа. Запыленный воздух с взвешенными в нем частицами пыли и мелкими каплями, преодолев задвижку и ротаметр, втекает в камеру, проходит между плоскими пластинами конденсатора и через редукционный клапан истекает в атмосферу, снова загрязняя окружающее пространство. Частицы пыли и мелкие капли, взвешенные в запыленном воздухе, изменяют диэлектрическую проницаемость воздуха, при этом изменяется и емкость плоского конденсатора, которая фиксируется блоком оперативной памяти. После этого, используя ранее полученные данные о емкости конденсатора при обтекании его пластин-обкладок чистым воздухом и информацию, полученную микропроцессором об изменившейся емкости конденсатора, с помощью программы, записанной в блоке постоянной памяти, вычисляется разность емкостей конденсатора при обтекании его чистым и запыленным воздухом. По вычисленной разности емкостей конденсатора и анализу этих данных определяется запыленность воздуха, величина которой либо допустима для контролируемого рабочего места, либо превышает ПДК. В случае, когда запыленность воздуха превышает ПДК, принимаются соответствующие меры.
Наряду с положительными отличиями устройство-прототип обладает и рядом недостатков. Рассмотрим эти недостатки более подробно.
Итак:
- в устройстве-прототипе пульсации давления, пульсирующий расход воздуха, акустический шум и вибрации от воздуходувки, вращающейся от электродвигателя, через жесткую связь «входной патрубок-двухсторонняя задвижка-ротаметр-камера» передаются воздушному диэлектрику и плоским пластинам конденсатора, являющимся чувствительным элементом датчика в камере, а также ротаметру. Результат влияния этих вибраций - неупорядоченное изменение расстояния между обкладками конденсатора, изменение емкости конденсатора и хаотичные различной частоты сигналы, поступающие в блок оперативной памяти. В итоге имеем большие погрешности и невысокую точность измерения запыленности воздуха данным устройством-прототипом;
- при обтекании взвешенного и постоянно колеблющегося поплавка в ротаметре потоком чистого или запыленного воздуха затруднено измерение объемного расхода воздуха; вверх по потоку за поплавком образуются вихри с осаждением пыли на поплавке; происходит деформация потока, изменение скорости, давления, температуры, плотности и линий тока воздуха в воздушном диэлектрике конденсатора. Результат изменения параметров потока воздуха - диэлектрика плоского конденсатора, как и ранее, - изменение емкости конденсатора и неупорядоченные сигналы, поступающие в блок оперативной памяти. В итоге вновь имеем дополнительные погрешности и принципиально невысокую точность измерения запыленности воздуха устройством-прототипом;
- воздуходувка в процессе измерения засасывает запыленный воздух, который, пройдя через устройство-прототип, вновь поступает в рабочую зону;
- использование воздуходувки и смонтированного вместе с ней устройства-прототипа в вакуумной камере при проведении ТВИ КА не представляется возможным из-за громоздкости воздуходувки и ручного монтажа-демонтажа фильтра оператором.
Дополним приведенные выше недостатки устройства-прототипа примером использования в музыкальных инструментах вибрирующих емкостей конденсаторов в колебательных контурах. Это известный музыкальный инструмент терменвокс, созданный в 1918 г. русским изобретателем Л.С.Терменом (1896-1993 гг.). В этом инструменте использовались два колебательных контура с конденсаторами, одна из обкладок которых была соединена с наружной штыревой антенной. Около штыревых антенн музыкант своими руками совершает колебательные (вибрирующие) движения, что приводит к изменению емкости конденсаторов, изменению генерируемых колебательными контурами электрических колебаний. Последние воспроизводятся акустическими системами как музыкальное произведение.
Для достижения вышеуказанного технического результата емкостная аспирационная система содержит емкостные аспирационные датчики с пористыми фильтрами известной массы и проходного сечения, электронные расходомеры, вакуумную линию откачки с регулирующей аппаратурой и мобильными вакуумными насосами, многоканальный модульный блок электроники с измерительными приборами и таймером, идентичные колебательные контуры, которые экранированы, заземлены и их подключение к многоканальному модульному блоку электроники выполнено коаксиальным многожильным проводом, а каждый емкостной аспирационный датчик смонтирован в разборном с изоляционным покрытием корпусе, в котором тандемно, соосно и изолированно друг от друга расположены идентичные носовой и кормовой лопастно-цилиндрические конденсаторы, при этом передний торец цилиндрической обкладки носового лопастно-цилиндрического конденсатора выполнен в виде аэродинамически спрофилированного насадка, а задний торец цилиндрической обкладки этого лопастно-цилиндрического конденсатора состыкован через фильтр и изоляционную втулку с цилиндрической обкладкой кормового лопастно-цилиндрического конденсатора, который через аэродинамически спрофилированный конфузор и электронный расходомер соединен с вакуумной линией откачки и мобильными вакуумными насосами, причем и носовой, и кормовой лопастно-цилиндрические конденсаторы включают в себя по две совокупности выполненных по форме спирали Архимеда пористых лопастных обкладок, одна совокупность которых эквидистантно закреплена на цилиндрической обкладке лопастно-цилиндрического конденсатора, а другая совокупность пористых лопастно-цилиндрических обкладок, выполненных также по спирали Архимеда, закреплена на аэродинамическом коаксиальном сердечнике, изолированном от цилиндрической обкладки и расположенной на продольной оси последней, при этом все пористые лопастные обкладки лопастно-цилиндрических конденсаторов эквидистантно и с воздушным зазором расположены друг относительно друга.
Предлагаемая емкостная аспирационная система поясняется чертежами, где на фиг. 2 - представлена принципиальная схема емкостной аспирационной системы; на фиг. 3 - принципиальная схема модульного блока электроники с измерительными приборами и таймером; на фиг. 4 - конструкция принадлежащего емкостной аспирационной системе емкостного аспирационного датчика.
Как и в описании способа автоматизированного контроля запыленности собственной внешней атмосферы космического аппарата при тепловакуумных испытаниях, представленном выше, основными значимыми и функционально связанными между собой блоками, агрегатами и элементами емкостной аспирационной системы 3 (см. фиг. 2-4) являются: идентичные емкостные аспирационные датчики 4 с фильтрами 5, датчики 4 крепятся, например, на «липучках» в произвольном положении в замкнутых полостях и на поверхности КА (на фиг. 2 показаны два датчика, КА условно обозначен контуром 1, а вакуумная камера - контуром 2), электронные расходомеры 6, вакуумная линия откачки 7, модульный блок электроники с измерительными приборами и таймером 8, внешние вакуумный затвор 9, турбомолекулярный насос 10, вакуумные вентили 11, форвакуумный насос 12.
Модульный блок электроники с измерительными приборами 8 емкостной аспирационной системы 3 (см. фиг. 3) включает в себя источник питания 13, многоканальный высокочастотный генератор 14, последовательные колебательные контуры регистрации запыленного и чистого воздушного потока 15 и 16 соответственно (на фиг. 3 условно показаны колебательные контуры одного емкостного аспирационного датчика 4, подключенные к модульному блоку электроники с измерительными приборами 8), многоканальный алфавитно-цифровой преобразователь (АЦП) 17, многоканальный электронный контроллер 18 с информационными портами USB, обрабатывающий информацию персональный компьютер 19.
Емкостной аспирационной датчик 4 (см. фиг. 4) является входным всасывающим устройством данной аспирационной системы 3. Датчик 4 содержит разборный с изоляционным покрытием корпус 20, состоящий из двух цилиндрических обкладок 21 и 22, которые состыкованы между собой с помощью резьбовой изоляционной втулки 23 (на фиг. 4 резьба не показана). В цилиндрических обкладках 21 и 22 смонтированы два идентичных лопастно-цилиндрических, носовой 24 и кормовой 25, конденсатора. Лопастно-цилиндрические конденсаторы 24 и 25 электрически изолированы друг от друга, включены соответственно в идентичные колебательные контуры 15 и 16 (см. фиг. 3) и разделены между собой пористым фильтром 5. Выходное сечение цилиндрической обкладки 22 датчика 4 состыковано с аэродинамически спрофилированным конфузором 26. Выходной патрубок 27 конфузора 26 соединен с электронным расходомером 6 (см. фиг. 2), который скреплен с вакуумной линией откачки 7 (см. фиг. 2), последняя состыкована с мобильными вакуумными насосами 10 и 12 (см. фиг. 2). Расположение лопастных обкладок 28 и 29 друг относительно друга в лопастно-цилиндрических конденсаторах 24 и 25 осуществляется с помощью изолированных винтов 30. Коаксиальные кабели 31, соединяющие лопастно-цилиндрические конденсаторы 24 и 25 с колебательными контурами 15 и 16 (см. фиг. 2) крепятся к разъемам 32 и 33. Лопастные обкладки 28 скреплены с цилиндрическими обкладками 21 и 22. Лопастные обкладки 29 закреплены на аэродинамических коаксиальных сердечниках 34 и 35. Отметим, что между обкладками 28 и 29 идентичных лопастно-цилиндрических конденсаторов 24 и 25 предусмотрен увеличенный зазор для всасывания расхода запыленного воздуха в аспирационные датчики 4 и уменьшения гидравлического сопротивления во входных сечениях датчиков 4 при этом всасывании.
Для увеличения емкости в конденсаторах 24 и 25 использованы совокупности, например, пористых лопастных обкладок, выполненных по форме спирали Архимеда. Изготовление таких обкладок возможно, например, на электроэрозийном станке типа AQ327L японской фирмы «Sodick».
Работает емкостная аспирационная система (см. фиг. 2-4) следующим образом, при этом работу емкостной аспирационной системы 3 рассмотрим на примере, когда в системе задействован один емкостной аспирационный датчик 4.
По команде от таймера стационарные вакуумные насосы (на фиг. 2 не показаны) и мобильные вакуумные насосы 10, 12, принадлежащие емкостной аспирационной системе 3, начинают вакуумировать вакуумную камеру 2 (см. фиг. 1-2). При этом вначале работает один форвакуумный насос 12, а после достижения низкого вакуума насос 12 начинает работать совместно с турбомолекулярным насосом 10. В вакуумной камере 2 возникают сложные воздушные течения, начинается всасывание запыленной струи воздуха в емкостной аспирационный датчик 4, установленный в замкнутой полости КА либо закрепленный на одном из матов ЭВТИ, которыми обшит КА. Всасываемый запыленный воздух изменяет диэлектрическую проницаемость носового лопастно-цилиндрического конденсатора 21 и, соответственно, емкость этого конденсатора, смонтированного в емкостном аспирационном датчике 4. Изменение емкости носового лопастно-цилиндрического конденсатора 24 выводит из резонансного режима колебательный контур 15 (см. фиг. 3), в который включен носовой лопастно-цилиндрический конденсатор 24, при этом изменяется информация на дисплеях многоканальных измерительных приборов 17, 18, 19 модульного блока электроники 8 (см. фиг. 3).
Далее всасываемая запыленная струя воздуха, преобразованная в конденсаторе 24 в многоструйный поток, фильтруется на пористом фильтре 5 с осаждением пыли на этом фильтре. После фильтра 5 отфильтрованный воздушный поток проходит кормовой лопастно-цилиндрический конденсатор 25, не изменяя емкости этого кормового конденсатора. Посему сохраняется резонансный режим колебательного контура 16 (см. фиг. 3), к которому подключен кормовой лопастно-цилиндрический конденсатор 25 и не изменяется информация на дисплеях многоканальных измерительных приборов 17, 18, 19 модульного блока электроники 8 (см. фиг. 3).
Далее воздушный поток проходит кормовой конфузор 26, патрубок 27, электронный расходомер 6 (см. фиг. 2), постоянно регистрирующий расход отфильтрованного воздуха, и по вакуумной линии откачки 7 (см. фиг. 2) через внешние вакуумные насосы 10, 12 сбрасывается в воздушное пространство испытательного центра или лаборатории.
Источники информации
1. Акишин А.И., Дунаев Н.М., Константинова В.В. и др. Атмосфера, создаваемая космическим аппаратом, и ее влияние на работоспособность бортовой аппаратуры. Модель космического пространства. Под ред. акад. Вернова С.Н. т.2. М.: НИИЯФ МГУ. 1983. С. 244-309.
2. Акишин А.И., Дунаев Н.М., Константинова В.В. Собственная атмосфера космических аппаратов и ее влияние на бортовые приборы и технологии в Космосе. Космическое материаловедение и технология. М.: Наука. 1977. С. 65-77.
3. Фукс Н.А. Механика аэрозолей. М.: Издательство АН СССР. 1955. С. 351.
4. Петров Ю.С., Алборов И.Д., Макиев Г.К. Способ измерения концентрации веществ в средах. Патент РФ №2275625. 2004.
5. Стернин Л.Е. Основы газодинамики двухфазных течений в соплах. М.: Машиностроение. 1974. С. 210.
6. Алемасов В.Е., Дрегалин А.Ф., Тишин А.П. Теория ракетных двигателей. М.: Машиностроение. 1980. С. 533
7. Шкрабак B.C., Веденева А.А., Калинин А.Б., Скоробогатов В.В., Митрофанов П.Г. Устройство контроля запыленности воздуха. Патент РФ №2147739. 1998.
| название | год | авторы | номер документа |
|---|---|---|---|
| АСПИРАЦИОННАЯ УСТАНОВКА | 2007 |
|
RU2343991C1 |
| Емкостной уровнемер для электропроводных жидкостей | 1980 |
|
SU1080028A1 |
| Емкостный датчик для измерения запыленности воздуха | 1988 |
|
SU1589141A1 |
| Устройство для импульсного заряда емкостного накопителя энергии | 1985 |
|
SU1228224A2 |
| Емкостный дилатометр | 1985 |
|
SU1318895A1 |
| Емкостный уровнемер | 1990 |
|
SU1753285A1 |
| ИНДУКТИВНО-ЕМКОСТНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2008 |
|
RU2407136C2 |
| Аспирационное устройство ленточного конвейера | 1981 |
|
SU998249A1 |
| Аспирационная установка | 1978 |
|
SU667774A1 |
| ИНДУКТИВНО-ЕМКОСТНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2010 |
|
RU2450413C1 |

Группа изобретений относится к способам автоматизированного контроля запыленности собственной внешней атмосферы (СВЗ) космического аппарата (КА) при тепловакуумных испытаниях (ТВИ) и емкостным аспирационным системам. В данном способе вакуумирование вакуумной камеры начинается одновременно со всасыванием запыленного воздуха в полости емкостных аспирационных датчиков, при этом изменяются диэлектрическая проницаемость и емкость входных конденсаторов аспирационных датчиков, резонансные режимы колебательных контуров, подключенных к этим конденсаторам. Далее запыленный воздух фильтруется на фильтрах и отфильтрованным проходит в кормовые конденсаторы датчиков, не изменяя диэлектрическую проницаемость, емкость кормовых конденсаторов и резонансные режимы колебательных контуров, подключенных к этим конденсаторам. Анализируя данные, записанные приборами, решается вопрос о чистоте СВА КА. Емкостная аспирационная система содержит идентичные емкостные аспирационные датчики с пористым фильтром и идентичные носовой и кормовой конденсаторы, которые включают в себя две совокупности выполненных по форме спирали Архимеда лопастных обкладок, одна совокупность которых эквидистантно закреплена на цилиндрических обкладках конденсаторов, а другая совокупность пористых лопастных обкладок, выполненных также по спирали Архимеда, закреплена на аэродинамических коаксиальных сердечниках, изолированных от цилиндрических обкладок и расположенных на продольной оси конденсатора. Техническим результатом является обеспечение постоянного контроля запыленности СВА КА при ТВИ с регистрацией и записью результатов контроля, отказ от эталонных образцов, повышение качества контроля, достоверности и точности измерения. 2 н.п. ф-лы, 4 ил.
1. Способ автоматизированного контроля запыленности собственной внешней атмосферы космического аппарата при тепловакуумных испытаниях, включающий размещение космического аппарата в вакуумной камере, конфигурацию и монтажную сборку емкостной аспирационный системы, оснащение ее емкостными аспирационными датчиками с фильтрами известной массы и проходного сечения, многоканальным модульным блоком электроники с измерительными приборами и таймером, электронными расходомерами, вакуумной линией откачки с мобильными вакуумными насосами, закрепление емкостных аспирационных датчиков с электронными расходомерами в контрольных точках космического аппарата, присоединение емкостных аспирационных датчиков посредством вакуумной линии откачки с мобильными вакуумными насосами, а электронных расходомеров - и к вакуумной линии откачки с мобильными вакуумными насосам, и к многоканальному модульному блоку электроники с измерительными приборами, подключение носовых и кормовых лопастно-цилиндрических конденсаторов, смонтированных в емкостных аспирационных датчиках, к экранированным, заземленным колебательным контурам многоканального модульного блока электроники с измерительными приборами, настройку колебательных контуров в резонансные режимы и вывод резонансных кривых на дисплеи измерительных приборов многоканального модульного блока электроники, закрытие крышки вакуумной камеры, отличающийся тем, что по команде от таймера начинается вакуумирование вакуумной камеры и всасывание запыленных струй воздуха в контрольных точках космического аппарата в заборные полости емкостных аспирационных датчиков, где запыленный воздух изменяет диэлектрическую проницаемость и емкость носовых лопастно-цилиндрических конденсаторов емкостных аспирационных датчиков, вследствие чего изменяются резонансные кривые колебательных контуров и отображения резонансных кривых на дисплеях измерительных приборов многоканального модульного блока электроники, далее всосанный запыленный воздух фильтруется с осаждением пыли на пористом фильтре и отфильтрованным проходит в кормовые лопастно-цилиндрические конденсаторы емкостных аспирационных датчиков, не изменяя диэлектрическую проницаемость и емкость этих кормовых конденсаторов, вследствие чего не изменяются резонансные режимы колебательных контуров и отображения резонансных кривых на дисплеях измерительных приборов многоканального модульного блока электроники, далее воздух проходит аэродинамически спрофилированные конфузоры емкостных аспирационных датчиков, электронные расходомеры, постоянно регистрирующие расход отфильтрованного воздуха, и по вакуумной линии откачки и мобильным вакуумным насосам сбрасывается в атмосферу, а по окончании тепловакуумных испытаний, анализируя информацию, записанную измерительными приборами многоканального модульного блока электроники, решается вопрос об остаточной запыленности или чистоте собственной внешней атмосферы космического аппарата, а разобрав емкостные аспирационные датчики и измерив привес пыли на фильтрах с известным проходным сечением, используя данные по суммарному объемному расходу отсосанного воздуха, времени вакуумирования вакуумной камеры, определяются средние за время тепловакуумных испытаний массовая концентрация пыли и плотность потока массы пыли, взвешенной в контрольных точках собственной внешней атмосферы космического аппарата, проводится микрофотографический анализ пыли.
2. Емкостная аспирационная система, содержащая емкостные аспирационные датчики с пористыми фильтрами известной массы и проходного сечения, электронные расходомеры, вакуумную линию откачки с регулирующей аппаратурой и мобильными вакуумными насосами, многоканальный модульный блок электроники с измерительными приборами и таймером, отличающаяся тем, что идентичные колебательные контуры многоканального модульного блока электроники экранированы, заземлены и их подключение к многоканальному модульному блоку электроники выполнено коаксиальным многожильным проводом, причем каждый емкостной аспирационный датчик смонтирован в разборном с изоляционным покрытием корпусе, в котором тандемно, соосно и изолированно друг от друга расположены идентичные носовой и кормовой лопастно-цилиндрические конденсаторы, при этом передний торец цилиндрической обкладки носового лопастно-цилиндрического конденсатора выполнен в виде аэродинамически спрофилированного насадка, а задний торец цилиндрической обкладки этого же лопастно-цилиндрического конденсатора состыкован через фильтр и изоляционную втулку с цилиндрической обкладкой кормового лопастно-цилиндрического конденсатора, который через аэродинамически спрофилированный конфузор и электронный расходомер соединен с вакуумной линией откачки и мобильными вакуумными насосами, причем лопастно-цилиндрические носовой и кормовой конденсаторы включают в себя две совокупности выполненных по форме спирали Архимеда пористых лопастных обкладок, одна совокупность которых эквидистантно закреплена на цилиндрической обкладке конденсатора, а другая совокупность пористых лопастных обкладок, выполненных также по спирали Архимеда, закреплена на аэродинамическом коаксиальном сердечнике, изолированном от цилиндрической обкладки и расположенном на продольной оси последней, при этом все пористые лопастные обкладки лопастно-цилиндрических конденсаторов эквидистантно и с воздушным зазором расположены друг относительно друга.
| В.А | |||
| Смирнов, А.Б | |||
| Надирадзе и др | |||
| Исследование загрязняющего воздействия собственной внешней атмосферы и плазмы стационарных плазменных двигателей на космическом аппарате Экспресс-АМ, Вестник Сибирского государственного аэрокосмического университета им | |||
| акад | |||
| М | |||
| Ф | |||
| Решетнева, Вып 2(10), стр | |||
| Способ изготовления звездочек для французской бороны-катка | 1922 |
|
SU46A1 |
| CN 101876615 A, 03.11.2010 | |||
| СПОСОБ ИЗМЕРЕНИЯ КОНЦЕНТРАЦИИ ВЕЩЕСТВ В СРЕДАХ | 2004 |
|
RU2275625C1 |
| RU 2000109054 A, 10.03.2002. | |||

