Область техники, к которой относится настоящее изобретение
Варианты осуществления настоящего изобретения в основном относятся к навигационным системам для промышленных транспортных средств и, в частности, к способу и устройству, которые позволяют использовать объекты с предварительно установленными координатами для определения местонахождения промышленных транспортных средств.
Предшествующий уровень техники настоящего изобретения
Различным организациям приходится постоянно управлять огромным количеством объектов для удовлетворения спроса на товары и/или обеспечения их предложения. Например, компании от самых малых до самых крупных, государственные организации и/или прочие структуры используют множество парадигм управления логистикой и материально-техническими ресурсами для перемещения объектов (например, сырья, товаров, машин, оборудования и т.п.) на различные объекты (например, на склады и в хранилища, на заводы и фабрики, в холодильные камеры и торговые точки). Транснациональные компании могут строить склады для хранения сырья в одной стране; а готовую продукцию, полученную из означенного сырья, они могут хранить в других странах для обеспечения поставок на местные розничные рынки. Складские помещения должны быть хорошо организованы, а их площади должны использоваться в высшей степени эффективно для обеспечения хранения и/или повышения объемов произведенной продукции и ее сбыта. Если не обеспечивать поставку сырья на производственные предприятия с оптимальной периодичностью, то на них будет произведено меньше продукции. В результате, недополученная выручка не сможет компенсировать затраты на приобретение сырья.
К сожалению, некоторые объекты, такие как склады, характеризуются рядом ограничений, которые препятствуют своевременному выполнению различных задач. Например, на складах и прочих объектах совместного пользования должна быть обеспечена безопасность рабочего персонала. Некоторые рабочие управляют тяжелой техникой и промышленными транспортными средствами, такими как вилочные погрузчики, которые представляют опасность для жизни и здоровья людей. Тем не менее, использование означенных машин необходимо для выполнения определенных задач, в том числе по перемещению грузов, например поддонов, в разные точки склада. На территории большинства складов работает множество водителей вилочных погрузчиков и используется большое количество таких машин для перемещения грузов. Для повышения производительности часто просто увеличивают количество погрузчиков и водителей.
На некоторых складах используется оборудование, автоматизирующее процесс выполнения означенных задач. Например, используются автоматизированные транспортные средства промышленного назначения, в том числе автоматизированные вилочные погрузчики, для перемещения грузов по заданному маршруту с их последующей разгрузкой в отведенных местах. На многих таких складах предусмотрено несколько естественных ориентиров, по которым автоматизированные транспортные средства могут определять свое точное местоположение, а на некоторых - ряд точек, где могут быть закреплены навигационные системы или маяки. При управлении автоматизированным транспортным средством обязательным условием является точный расчет его положения. Положение транспортного средства в данном контексте означает его местоположение и данные о курсе; при этом под положением обычно понимается пространственное положению объекта в системе прямоугольных координат с известным началом осей и с данными о вращении относительно каждой из этих осей или совокупными данными о положении и вращениях. Если транспортное средство не в состоянии определить свое текущее положение в физическом пространстве, то оно не сможет выполнить поставленную задачу. Поэтому в автоматизированных транспортных средствах обычно используются внутренние изображения или образы окружающей среды, в том числе положение некоторых навигационных ориентиров, по которым можно рассчитать положение транспортного средства.
Тогда как метод использования ориентиров в виде неподвижных инфраструктурных объектов для определения местоположения или для установки на них навигационных маяков давно известен, метод использования предметов или поддонов с предварительно установленными координатами в качестве ориентиров, облегчающих навигацию, до сегодняшнего дня известен не был. Таким образом, данная область техники испытывает потребность в устройстве и способе определения местоположения автоматизированных транспортных средств промышленного назначения с использованием динамически размещаемых объектов с предварительно установленными координатами в качестве основных ориентиров.
Краткое раскрытие настоящего изобретения
Различные варианты осуществления настоящего изобретения в основном включают в себя способы и устройства, использующие - как минимум - один перемещаемый объект с заранее установленными координатами в качестве ориентира для определения местоположения промышленного транспортного средства. Описываемый способ включает в себя размещение в физической среде, как минимум, одного подвижного объекта с заранее установленными координатами; добавление объекта с заранее установленными координатами в карту в качестве ориентира; привязку наблюдаемых признаков к ориентиру по модели объекта и определение положения промышленного транспортного средства относительно подвижного объекта с заранее установленными координатами.
В частности, согласно одному из вариантов осуществления настоящего изобретения, предусматривается способ использования динамически размещаемых объектов с заранее установленными координатами в качестве ориентира для управления промышленным транспортным средством. Способ включает в себя (1) перемещение объекта по определенному маршруту в физической среде и размещение объекта в физической среде в качестве объекта с установленными координатами, динамически размещаемого в физической среде; (2) обновление карты физической среды путем добавления в нее данных о размещаемом объекте, представляющих в карте физической среды динамически размещаемый объект с установленными координатами, с целью создания обновленной карты, в которой размещаемый объект - после добавления в карту - мог бы служить ориентиром с наблюдаемыми признаками, и который мог бы использоваться при управлении промышленным транспортным средством с обеспечением доступа к обновленным картографическим данным; (3) сохранение обновленных картографических данных на портативном компьютере, который прилагается к промышленному транспортному средству, или на центральном компьютере, который связан сетью с ПК на промышленном транспортном средстве; и (4) управление промышленным транспортным средством, исходя из его навигационного положения, которое определяется по данным датчиков и обновленным картографическим данным, путем проведения означенного промышленного транспортного средства по определенному маршруту в физической среде.
Положение динамически размещаемого объекта с предварительно установленными координатами может быть определено, помимо прочего, исходя из (1) прогнозированных данных о положении, хранящихся на центральном компьютере или в портативном компьютере, который связан с промышленным транспортным средством; и (2) местоположения размещаемого объекта относительно грузоподъемной рамы промышленного транспортного средства. Установленное положение может быть использовано для создания карты с обновленными данными; при этом промышленным транспортным средством можно управлять, исходя из его навигационного положения в пространстве, которое определяется по обновленной карте, в которую внесены данные об установленном положении.
Ориентиры могут быть созданы на базе данных о размещаемом объекте; и эти данные, в свою очередь, могут включать в себя признаки размещаемого объекта, положение ориентира (отображающее место, в которое был помещен объект) и/или погрешность положения объекта по прогнозированным данным о положении.
Предполагается, что размещаемый объект может включать в себя уникальный идентификатор и что для распознавания этого идентификатора может быть использован датчик, установленный на промышленном транспортном средстве. В этом случае данные о размещаемом объекте вместе с уникальным идентификатором удобно хранить на центральном или портативном компьютере.
Прогнозированные данные о положении объекта могут также храниться на портативном или центральном компьютере; при этом на промышленном транспортном средстве может быть предусмотрен датчик для определения местоположения объекта в привязке в грузоподъемной раме промышленного транспортного средства. В этом случае положение размещаемого объекта можно определить по прогнозированным данным о его положении и по местоположению объекта относительно грузоподъемной рамы промышленного транспортного средства.
В некоторых случаях промышленное транспортное средство может перейти из нерабочего состояние в рабочее, когда текущее положение данного средства не известно. В таком случае последующее управлением этим промышленным транспортным средством может осуществляться путем определения его текущего положения по карте с обновленными данными и проводкой данного транспортного средства по определенному маршруту в физической среде.
Динамически размещаемый объект с предварительно установленными координатами может иметь общеизвестные геометрические параметры. Общеизвестную геометрию можно определить по данным моделирования размещаемого объекта, которые описывают набор признаков динамически размещаемого объекта с предварительно установленными координатами; при этом промышленным транспортным средством можно управлять, исходя из его местонахождения с использованием вышеозначенных данных моделирования размещаемого объекта. В некоторых случаях динамически размещаемый объект с предварительно установленными координатами может содержать поддон или элементы, расположенные на поддоне, а данные обновленной карты должны включать в себя модель поддона и элементов, расположенных на поддоне. В иных случаях данные обновленной карты включают в себя невидимые динамические объекты, сгенерированные по местам расположения товара на складе в соответствии с параметрическими данными, выведенными по размерам складских стоек, или в соответствии с правилами складирования применительно к блочным складским участкам; при этом описываемый способ включает в себя обновление карты с тем, чтобы сделать невидимый объект видимым. Кроме того, данные о размещаемых объектах, представляющие динамически размещаемые объекты с предварительно установленными координатами, служат ориентиром, содержащим характерные признаки, которые заметны с нескольких сторон. Обычно данные о размещаемом объекте поступают (по меньшей мере, частично) с датчика, закрепленного на промышленном транспортном средстве; а соответствующие данные, по которым определяется навигационное положение в пространстве, могут включать в себя данные в виде изображений, данные лазерного дальномера, данные ультразвукового дальномера, данные датчика давления, данные кодового датчика положения или комбинации означенных данных.
Во многих случаях большинство ориентиров, содержащихся в обновленной карте, формируется за счет данных о размещаемом объекте; при этом текущее положение транспортного средства часто определяется путем сравнения с данными об ориентире, которые почти целиком состоят из данных о размещаемом объекте. Согласно некоторым вариантам осуществления настоящего изобретения текущее положение транспортного средства определяется путем сравнения с данными об ориентире, полностью состоящими из данных о размещаемом объекте.
Предполагается, что стадия по управлению промышленным транспортным средством на основании его навигационного положения в пространстве, определяемого по данным датчика и обновленной карты, содержит одну или несколько автоматических операций, выполняемых с помощью центрального компьютера или портативного ПК, прилагаемого к промышленному транспортному средству. В этом случае предполагается также, что вид автоматической операции можно выбрать, т.е. это может быть операция по перемещению транспортного средства или отображение оповещения о состоянии транспортного средства, или сочетание того и другого.
Согласно еще одному из вариантов осуществления настоящего изобретения, к промышленному транспортному средству прилагается компьютер, или же означенное промышленное транспортное средство связано сетью с центральным компьютером. Компьютер содержит навигационный модуль для управления промышленным транспортным средством, исходя из его навигационного положения в пространстве, которое определяется по данным датчика и обновленной карты. Компьютер позволяет использовать динамически размещаемые объекты с предварительно установленными координатами в качестве ориентиров для управления промышленным транспортным средством.
Вышеупомянутое управление транспортным средством может включать в себя одну или несколько ручных операций, выполняемых водителем данного промышленного транспортного средства; одну или несколько автоматических операций, выполняемых с помощью центрального компьютера или портативного ПК, прилагаемого к промышленному транспортному средству; или комбинации означенных операций. Например, но без ограничения вышесказанного, предполагается, что управление транспортным средством может включать в себя навигацию транспортного средства, в том числе позиционирование, рулевое управление, контроль скорости, захват и подъем груза и т.п. Кроме того, также без ограничения вышесказанного, предполагается, что управление транспортным средством может включать в себя визуальное отображение аварийного состояния транспортного средства или иное оповещение о таком состоянии.
Краткое описание чертежей
Для того чтобы лучше понять вышеперечисленные отличительные признаки настоящего изобретения, его более подробное описание, обобщенное выше, может быть представлено посредством ссылок на варианты осуществления настоящего изобретения, некоторые из которых проиллюстрированы на прилагаемых чертежах. Однако следует отметить, что на прилагаемых чертежах проиллюстрированы только типичные варианты осуществления настоящего изобретения; и, следовательно, их не следует рассматривать, как ограничивающие объем изобретения, так как настоящее изобретения может включать в себя и иные, не менее эффективные, варианты осуществления.
На фиг. 1 представлен вид физической среды в перспективе для различных вариантов осуществления настоящего изобретения;
На фиг. 2 представлено перспективное изображение вилочного погрузчика, осуществляющего перемещения в физической среде с целью выполнения различных задач согласно одному или нескольким вариантам осуществления настоящего изобретения;
На фиг. 3 представлена структурная блок-схема системы использования динамически размещаемых объектов с предварительно установленными координатами в качестве ориентиров для определения местоположения промышленного транспортного средства согласно одному или нескольким вариантам осуществления настоящего изобретения;
На фиг. 4 представлена функциональная блок-схема системы точного определения местоположения промышленного транспортного средства согласно одному или нескольким вариантам осуществления настоящего изобретения;
На фиг. 5 представлено схематическое изображение карты физической среды, содержащей динамически размещаемые объекты с предварительно установленными координатами в качестве ориентиров согласно одному или нескольким вариантам осуществления настоящего изобретения; и
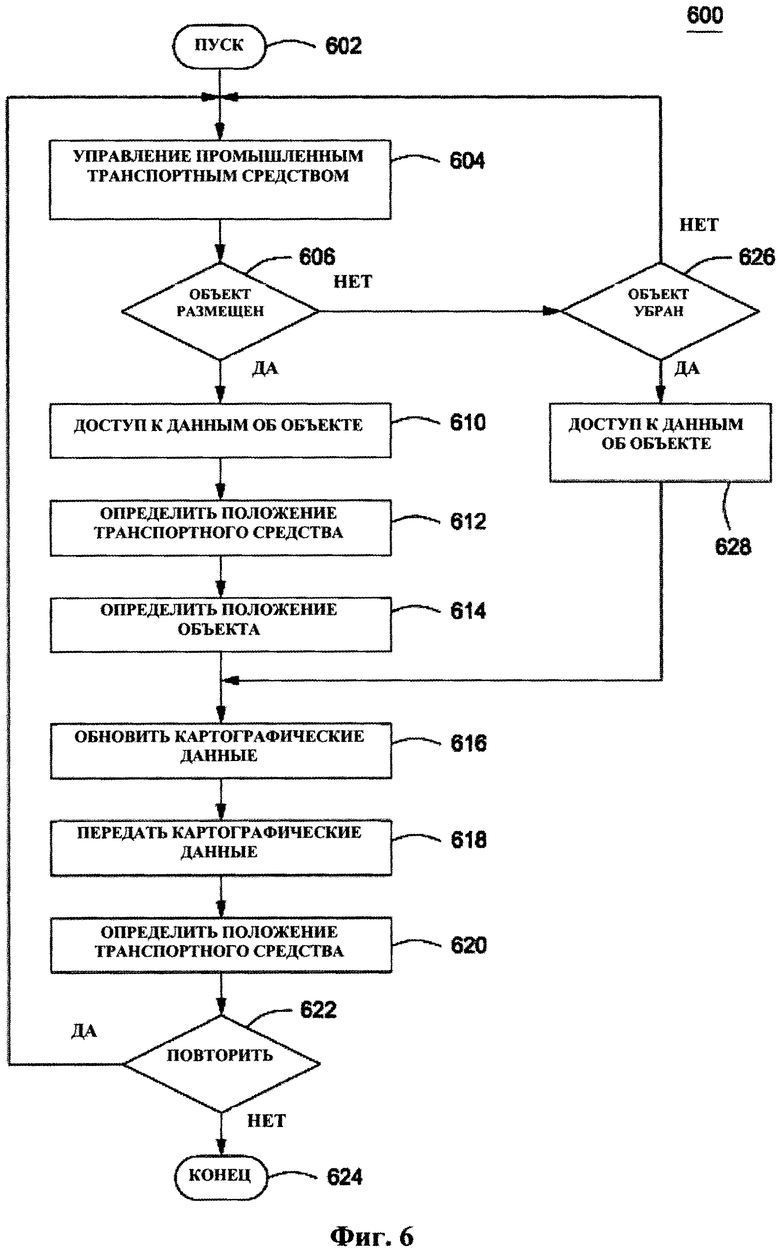
На фиг. 6 представлена блок-схема способа назначения объекта с предварительно установленными координатами в качестве уникального ориентира с целью облегчения определения местоположения согласно одному или нескольким вариантам осуществления настоящего изобретения.
Подробное раскрытие настоящего изобретения
На фиг. 1 представлено схематическое перспективное изображение физической среды 100 согласно одному или нескольким вариантам осуществления настоящего изобретения.
Согласно некоторым вариантам осуществления настоящего изобретения, физическая среда 100 включает в себя транспортное средство 102, подключенное к портативному компьютеру 104; центральный компьютер 106; а также группу датчиков 108. Группа датчиков 108 включает в себя множество приборов, предназначенных для анализа различных объектов в физической среде 100 и передачи данных (например, данных в виде изображений, видеоданных, картографических данных, данных в виде трехмерной графики и/или т.п.) на портативный компьютер 104 и/или на центральный компьютер 106, что подробнее описано ниже. Группа датчиков 108 состоит из датчиков различного типа, таких как кодовые датчики положения, ультразвуковые дальномеры, лазерные дальномеры, датчики давления и/или т.п.
Кроме того, физическая среда 100 содержит настил 110, на котором располагается множество объектов. В число этих объектов входит множество поддонов 112, множество единиц груза 114 и/или прочих объектов, которые более подробно описаны ниже. Физическая среда 100 также содержит различные препятствия (не показанные на рисунке), мешающие нормальной работе транспортного средства 102. Некоторые из вышеперечисленного множества объектов могут представлять собой препятствия на различных маршрутах (например, на предварительно запрограммированных или динамически рассчитываемых маршрутах), если они мешают выполнению задач.
Физическая среда 100 также содержит множество маркеров 116. Множество маркеров 116 представлено на фигуре в виде объектов, закрепленных на настиле и/или потолке. Согласно некоторым вариантам осуществления настоящего изобретения, множество маркеров 116 представляют собой ориентирные маяки, некоторые из которых могут отличаться от остальных или обладать уникальной конфигурацией для облегчения определения местоположения транспортного средства при навигации на основании данных о среде, что более подробно описано ниже. Множество маркеров 116, а также иные объекты в физической среде 100, образуют ориентиры среды с наблюдаемыми признаками, фиксируемыми, как минимум, одним датчиком, например, входящим в состав группы датчиков 108. Портативный компьютер 104 извлекает характерные признаки среды и определяет точное текущее положение транспортного средства.
Физическая среда 100 может включать в себя склад или холодильный склад для хранения множества единиц груза 114 перед их последующей отправкой. Склады могут включать в себя грузовые эстакады для погрузки и разгрузки грузов с автотранспорта, железнодорожного транспорта, самолетов и/или морских судов, предназначенных для коммерческих перевозок. Множество единиц груза 114 обычно включает в себя различные товары, готовые изделия, и/или сырье, и/или т.п. Например, множество единиц груза 114 может представлять собой потребительские товары, размещаемые на поддонах в соответствии с требованиями стандартов ISO, которые укладываются в стеллажи или штабелируются вилочными погрузчиками перед распределением и отправкой в магазины розничной торговли. Промышленное транспортное средство 102 облегчает такое распределение путем перемещения потребительских товаров в специально отведенные места, где эти потребительские товары грузятся на автотранспорт для коммерческих перевозок (например, на грузовики) для их последующей доставки по месту или по местам назначения.
Согласно одному или нескольким вариантам осуществления настоящего изобретения, транспортное средство 102 может представлять собой автоматизированную самоходную тележку (ACT) в виде, например, автоматизированного вилочного погрузчика, предназначенного для погрузки/разгрузки и/или перемещения множества единиц груза 114 по настилу 110. В транспортном средстве 102 используется один или несколько подъемных механизмов, таких как вилочные захваты, для поднятия одной или нескольких единиц груза 114 и их последующей транспортировки по заданному маршруту в специально отведенное место. Согласно альтернативному варианту осуществления настоящего изобретения, одна или несколько единиц груза 114 могут быть размещены на поддоне 112, который затем поднимается транспортным средством 102 и перемещается по месту назначения.
Каждый из множества поддонов 112 представляет собой транспортировочную конструкцию, которая удерживает груз в устойчивом положении при его подъеме транспортным средством 102 и/или иным подъемным устройством (например, устройством подъема поддонов и/или фронтальным погрузчиком). Поддон 112 представляет собой конструкцию, основание которой воспринимает нагрузку от груза и которая может использоваться для перемещения и хранения грузов. Одна единица или несколько единиц из множества поддонов 112 могут быть использованы в системе стеллажей (не показана на рисунке). В системе стеллажей одного типа одна или несколько единиц груза 114, размещенных на одном или нескольких поддонах 112, могут выдвигаться с помощью гравитационных роликовых транспортеров или конвейеров. Один или несколько поддонов 112 перемещаются вперед до тех пор, пока их движение не будет замедлено или остановлено ограничителем, стопорным устройством или другим поддоном 112. На стеллажах других типов поддоны удерживаются за счет сцепления с горизонтальными полками, что обеспечивает дополнительную устойчивость. В системе стеллажей такого типа нижний поддон часто устанавливается на полу; при этом настил поддона загораживает собой вертикальные стойки стеллажа, что делает невозможным использование последних в качестве ориентиров.
Во многих случаях некоторые участки физической среды 100 представляют собой участи блочного складирования, где поддоны 112 размещаются на полу; при этом они укладываются один на один. Участки блочного складирования организованы таким образом, что множество поддонов распределяется по большой ширине, далеко вглубь и на такую высоту, что естественные ориентиры или маяки 116 становятся невидимыми для промышленного транспортного средства, которое находится в глубине между рядов поддонов.
Согласно некоторым вариантам осуществления настоящего изобретения портативный компьютер 104 и центральный компьютер 106 представляют собой вычислительные устройства, которые управляют транспортным средством 102 и выполняют иные задачи в физической среде 100. Портативный компьютер 104 соединен с транспортным средством 102 так, как это показано на рисунке. Портативный компьютер 104 может также получать и агрегировать данные (например, данные лазерного сканера, данные в виде изображений и прочие соответствующие данные датчиков), которые передаются группой датчиков 108. Различные программные модули в портативном компьютере 104 управляют работой транспортного средства 102, что подробнее описано ниже.
Согласно вариантам осуществления настоящего изобретения в качестве ориентиров для облегчения точной навигации промышленного транспортного средства 102 может быть использовано местоположение поддонов 112, распределенных по физической среде 100. Согласно некоторым вариантам осуществления настоящего изобретения, портативный компьютер 104 регистрирует местоположения поддонов 112, размещенных в физической среде, и обновляет карту объекта, занося в нее месторасположение означенных поддонов. Как подробно описано ниже, портативный компьютер 104 использует модель поддона 112 и единиц груза 114, размещаемых на поддонах, для создания ориентира с характерными навигационными признаками комбинированного груза, которые мог бы распознавать датчик. При выполнении одной или нескольких задач промышленное транспортное средство 102 определяет местоположение, отслеживая навигационные признаки, которые поступают с группы датчиков 108. Отслеженные признаки сравниваются в фильтре с нанесенными на карту известными статическими и/или динамическими характеристиками для предварительного расчета текущего положения транспортного средства. Следует отметить существенное различие между распознаванием поддонов 112 как препятствий для навигации и использованием размещенных поддонов в качестве навигационных ориентиров для точного определения местоположения промышленного транспортного средства 102 таким образом, чтобы можно было размещать или забирать другие поддоны, которые требуются для выполнения той или иной задачи.
Как подробно описано ниже, портативный компьютер 104 определяет один или несколько участков в физической среде 100 для облегчения определения местоположения. Физическая среда может быть разбита на множество участков с соответствующими данными, хранящимися на множестве карт таких участков, с целью ограничения количества ориентиров, учитываемых при определении местоположения. Создание карт участков описано в Заявке на патент США, порядковый номер 13/159,501, поданной 14 июня 2011 года. Карты участков с внесенными в них объектами с предварительно установленными координатами могут быть распределены между множеством промышленных транспортных средств. Объекты с предварительно установленными координатами представляют собой объекты, такие как поддоны и грузы с известными репрезентативными геометрическими параметрами, положение которых может фиксироваться на карте промышленным транспортным средством и которые могут использоваться в дальнейшем в качестве ориентира при определении местоположения. Распределение картографических данных между промышленными транспортными средствами описано в Заявке на патент США, порядковый номер 13/159,500, поданной 14 июня 2011 года. Специалистам в данной области техники очевидно, что карты участков могут содержать области среды 100, где динамические размещаемые объекты с предварительно установленными координатами могут быть практически единственными видимыми ориентирами, по которым можно определить местоположение промышленного транспортного средства.
В отличие от неподвижных объектов инфраструктуры, местоположение объектов с предварительно установленными координатами точно не зафиксировано, а рассчитывается автоматизированным промышленным транспортным средством, размещающим объекты. Таким образом, положение динамически размещаемого объекта с предварительно установленными координатами допускает наличие погрешности, обусловленной различными факторами. Эти факторы, помимо прочего, включают в себя погрешность местоположения транспортного средства в момент размещения груза; погрешность местоположения объекта на вилочном захвате транспортного средства; перемещение объекта в момент его размещения; смещение объекта, когда на него укладываются другие поддоны 112 с грузом; смещение в результате случайного контакта с оборудованием и т.п. Таким образом, портативный компьютер 104 должен смоделировать местоположение объекта с предварительно установленными координатами; признаки, характерные для объекта; и погрешность положения объекта. Эти погрешности добавляются к погрешности, связанной с замерами объекта, проводимыми датчиками; следовательно, объекты с предварительно установленными координатами являются ориентирами на карте, которые требуют последующей обработки на портативном компьютере для определения точного местоположения. Портативный компьютер 104 точно управляет движением промышленного транспортного средства, используя динамически размещаемые объекты с предварительно установленными координатами в качестве единственных ориентиров.
Согласно некоторым вариантам осуществления настоящего изобретения портативный компьютер 104 настроен на определение положения транспортного средства при пуске, что требует локализации по эталонной карте, когда предыдущее положение транспортного средства не известно. Эталонная карта предусматривает достаточное количество априорных картографических данных в глобальной системе координат. После того как портативный компьютер 104 определит, что положение промышленного транспортного средства 102 неизвестно (например, сразу после включения автоматизированной системы), портативный компьютер 104 начнет поиск наиболее вероятного положения промышленного транспортного средства 102, используя один из способов, в том числе исследование среды на предмет выявления уникального сочетания признаков или навигационных маркеров 116, специально размещенных для этой цели. При исследовании среды из данных датчика извлекаются результаты различных измерений (например, значения углов, длины, радиуса и т.п.), которые обрабатываются с целью выявления текущих наблюдаемых признаков, которые сравниваются с известными признаками для определения первоначального положения транспортного средства. Далее, исходя из положения транспортного средства, портативный компьютер 104 определяет маршрут выполнения задания в физической среде 100.
Один из альтернативных способов согласно вариантам осуществления настоящего изобретения предусматривает использование портативного компьютера, который получает данные о положении от внешнего источника, например с пользовательского интерфейса или от системы определения местоположения с низкой точностью, пример которой раскрыт патентом США (Публикация №2011/0148714 А1) под названием «Система и способ определения местоположения источников электромагнитного излучения в ближней зоне». Согласно еще одному из альтернативных способов, используемый в качестве ориентира объект однозначно идентифицируется за счет использования штрих-кодов, радиочастотной метки-идентификатора (RFID), особой формы или какого-либо иного уникального признака, который может быть считан датчиками промышленного транспортного средства и использован в качестве ориентира, не допускающего двоякого толкования признаков, явно отличающихся от наблюдаемых признаков соседних объектов, которые сравниваются с известными признаками, ранее занесенными в карту.
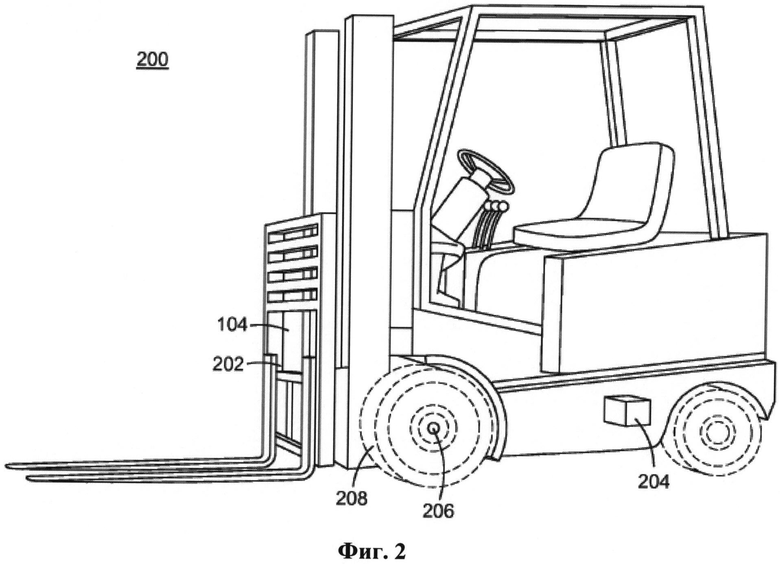
На фиг. 2 представлено перспективное изображение вилочного погрузчика 200, обеспечивающего автоматизированное выполнение различных задач в физической среде согласно одному или нескольким вариантам осуществления настоящего изобретения.
Вилочный погрузчик 200 (например, автопогрузчик с высокорасположенной или низкорасположенной подъемной платформой, штабелер, погрузчик-полуприцеп, погрузчик с боковым расположением грузоподъемника, вилочный подъемник и т.п.) представляет собой самоходную промышленную тележку разной грузоподъемности, которая используется для подъема и перемещения различных объектов. Согласно некоторым вариантам осуществления настоящего изобретения вилочный погрузчик 200 рассчитан на перемещение одного или нескольких поддонов (например, поддонов 112, показанных на фиг. 1) с единицами груза (например, с единицами груза 114, представленными на фиг. 1) по определенному маршруту в физической среде (например, в физической среде 100, представленной на фиг. 1). Маршруты могут быть заданы заранее или же рассчитываться динамически по мере поступления заданий. Вилочный погрузчик 200 может заходить вглубь участка хранилища с множеством поддоно-мест, чтобы разместить или забрать поддон. Часто вилочный погрузчик 200 направляется на определенный участок хранилища и размещает поддоны на консольных кронштейнах или направляющих.
Вилочный погрузчик 200 обычно содержит два и более вилочных захвата (например, в виде зубьев или направляющих брусьев) для подъема и перемещения единиц груза в физической среде. Согласно альтернативному варианту осуществления настоящего изобретения, вместо двух и более вилочных захватов, вилочный погрузчик 200 может иметь одну или несколько металлических опор (не показаны на рисунке) для подъема единиц груза определенного типа (например, рулонов ковровых покрытий, металлических бухт и т.п.). Согласно одному из вариантов осуществления настоящего изобретения вилочный погрузчик 200 содержит телескопический вилочный захват с гидравлическим приводом, который позволяет разместить два и более поддона вплотную друг к другу.
Согласно одному или нескольким вариантам осуществления настоящего изобретения, вилочный погрузчик 200 может также иметь в своем составе различные исполнительные механизмы с механическим, гидравлическим и/или электрическим приводом. Согласно некоторым вариантам осуществления настоящего изобретения вилочный погрузчик 200 содержит один или несколько гидравлических приводов (не обозначены), которые обеспечивают боковое перемещение и/или вращательное движение двух и более вилочных захватов. Согласно одному из вариантов осуществления настоящего изобретения вилочный погрузчик 200 содержит гидравлический привод (не обозначен), обеспечивающий сведение и разведение вилочных захватов. Согласно еще одному из вариантов осуществления настоящего изобретения вилочный погрузчик 200 содержит механическое или гидравлическое приспособление для обжатия груза (например, бочек, кег, рулонов бумаги и т.п.), подлежащих транспортировке.
Вилочный погрузчик 200 может быть связан с портативным компьютером 104, который содержит программные модули для управления вилочным погрузчиком 200 в соответствии с выполняемой задачей или задачами. Вилочный погрузчик 200 также связан с группой различных сенсорных устройств (например, с группой датчиков 108, представленной на фиг. 1), которые передают информацию (например, данные в виде изображений, видеоданные, картографические данные и/или данные в виде трехмерной графики) на портативный компьютер 104 для выявления наблюдаемых признаков на ориентирах физической среды. Эти устройства могут монтироваться снаружи или внутри вилочного погрузчика 200 или устанавливаться в заранее отведенных местах физической среды 100. Примеры конструктивного исполнения вилочного погрузчика 200 обычно включают в себя камеры 202, и/или двухмерные лазерные сканеры 204, закрепляемые с каждой стороны погрузчика, и/или кодовые датчики положения 206, закрепляемые на каждом колесе 208. Согласно прочим вариантам конструктивного исполнения вилочный погрузчик 200 содержит только один лазерный сканер плоского сканирования 204 и кодовый датчик положения 206. Эти кодовые датчики положения определяют данные о перемещении, связанные с движением транспортного средства. Согласно некоторым вариантам осуществления настоящего изобретения количество сенсорных устройств (например, лазерных сканеров, лазерных дальномеров, кодовых датчиков положения, датчиков давления и/или прочих устройств), а также их положение на вилочном погрузчике 200 зависят от типа транспортного средства; при этом положение, в котором они установлены, влияет на обработку данных измерений. Например, за счет размещения всех лазерных сканеров в положении, которое позволяет проводить измерения, группа датчиков 108 может обрабатывать данные лазерных сканеров и преобразовывать их в данные для управления вилочным погрузчиком 200. Более того, группа датчиков 108 может объединить несколько лазерных сканеров в единый виртуальный лазерный сканер, который может использоваться различными программными модулями для управления вилочным погрузчиком 200.
Согласно некоторым вариантам осуществления настоящего изобретения, датчики - именуемые в дальнейшем «внешними датчиками» - устанавливаются в фиксированных точках физической среды (например, физической среды 100, представленной на фиг. 1); при этом массив данных, получаемых с этих датчиков, должен повысить качество автоматического управления. Такие внешние датчики могут включать в себя лазерные сканеры или камеры и прочие устройства подобного рода. Внешние датчики могут также включать в себя ограниченное количество приемопередатчиков и/или иных активных или пассивных устройств, через которые автоматизированное транспортное средство могло бы получать данные о своем приблизительном положении для активации функции определения местоположения.
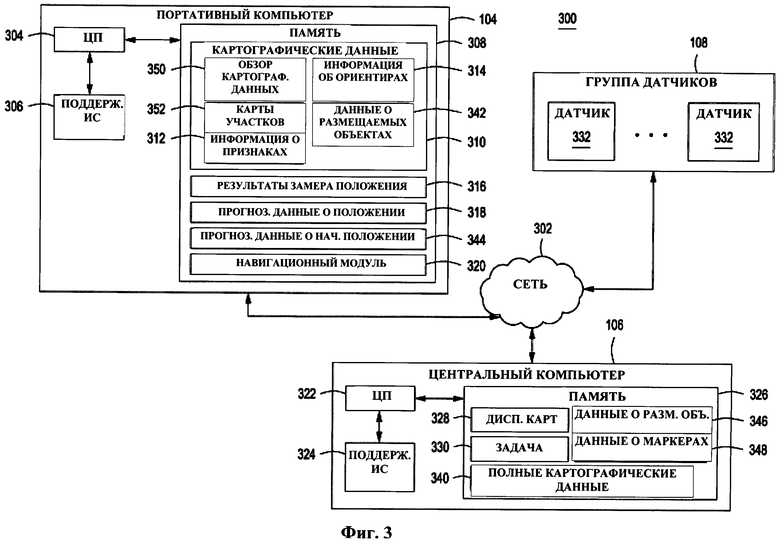
На фиг. 3 представлена структурная блок-схема системы 300, которая - согласно одному или нескольким вариантам осуществления настоящего изобретения - определяет точное местоположение промышленного транспортного средства. Согласно некоторым вариантам осуществления настоящего изобретения, система 300 содержит портативный компьютер 104, центральный компьютер 106 и группу датчиков 108, соединенных друг с другом сетью 302.
Портативный компьютер 104 представляет собой вычислительное устройство определенного типа (например, переносной компьютер, настольный компьютер, карманный компьютер (КПК) и т.п.), которое содержит центральный процессор (ЦП) 304, различные поддерживающие интегральные схемы 306 и память 308. ЦП 304 может содержать один или несколько серийно производимых микропроцессоров или микроконтроллеров, обеспечивающих обработку и хранение данных. Различные поддерживающие интегральные схемы 306 облегчают работу ЦП 304; при этом они могут включать в себя синхронизирующие схемы, шины, источники питания, входные/выходные цепи и/или прочие схемы. Память 308 включает в себя ПЗУ, ОЗУ, накопитель на магнитных дисках, оптическое запоминающее устройство, устройство хранения данных со съемным носителем и т.п. Память 308 содержит различные данные, такие как картографические данные 310, результаты определения местоположения 316 и прогнозированные данные о положении 318. Картографические данные включают в себя карты участков 352, информацию о характерных признаках объектов 312, информацию об ориентирах 314, эталонные данные о размещаемых объектах 342 и обзорную карту 350. Память 308 содержит различные пакеты программного обеспечения, такие как навигационный модуль 320.
Центральный компьютер 106 представляет собой вычислительное устройство определенного типа (например, переносной компьютер, настольный компьютер, карманный компьютер (КПК) и т.п.), которое содержит центральный процессор (ЦП) 322, различные поддерживающие интегральные схемы 324 и память 308. ЦП 322 может содержать один или несколько серийно производимых микропроцессоров или микроконтроллеров, обеспечивающих обработку и хранение данных. Различные поддерживающие интегральные схемы 324 облегчают работу ЦП 322; при этом они могут включать в себя синхронизирующие схемы, шины, источники питания, входные/выходные цепи и/или прочие схемы. Память 326 включает в себя ПЗУ, ОЗУ, накопитель на магнитных дисках, оптическое запоминающее устройство, устройство хранения данных со съемным носителем и т.п. Память 326 содержит различные пакеты программного обеспечения, такие как диспетчер карт 328; а также различные данные, такие как задача 330, полная база картографических данных 340 и база данных размещенных объектов 346.
Сеть 302 содержит систему связи, которая соединяет между собой вычислительные устройства посредством проводов, кабелей, оптоволоконных кабелей и/или беспроводных средств; при этом связь осуществляется с помощью хорошо известных элементов сети различного типа, таких как концентраторы, коммутаторы и маршрутизаторы и т.п. Сеть 302 может использовать различные общеизвестные протоколы для обмена данными между сетевыми ресурсами. Например, сеть 302 может быть частью Интернета или Интранета за счет использования различных средств связи, таких как Ethernet, Wi-Fi, протокол широкополосной радиосвязи (WiMax), общий сервис пакетной радиопередачи данных (GPRS) и т.п.
Группа датчиков 108 соединена по каналам связи с портативным компьютером 104, который находится на автоматизированном транспортном средстве, таком как вилочный погрузчик (например, вилочный погрузчик 200, представленный на фиг. 2). Группа датчиков 108 содержит множество устройств 332, предназначенных для мониторинга физической среды и сбора различных данных, которые сохраняются на портативном компьютере 104 и/или на центральном компьютере. Согласно некоторым вариантам осуществления настоящего изобретения группа датчиков 108 может включать в себя то или иное сочетание одного или нескольких лазерных сканеров и/или одной или нескольких камер. Согласно некоторым вариантам осуществления настоящего изобретения на автоматизированном промышленном транспортном средстве может быть установлено множество устройств 332. Например, лазерные сканеры и камеры могут закрепляться на грузоподъемной раме над вилочным захватом или, в качестве альтернативного варианта, под вилочным захватом.
Согласно некоторым вариантам осуществления настоящего изобретения, картографические данные 310 разбиты на карты участков 352; при этом участки могут быть частично перекрывающимися или четко различимыми. Карта каждого участка содержит ряд ориентиров, которые могут быть статическими или динамическими. Эти ориентиры могут быть включены в карты одного или нескольких участков, а также в обзорную карту. Каждый ориентир обладает характерными признаками, которые могут идентифицироваться одним или несколькими датчиками. Согласно некоторым вариантам осуществления настоящего изобретения, некоторые ориентиры могут быть соотнесены с множеством динамически размещаемых объектов с предварительно установленными координатами и даже, в первую очередь, именно с такими объектами. Картографические данные 310 могут включать в себя вектор известных признаков. Информация 312 определяет признаки (например, кривые, линии и/или т.п.), характерные для одного или нескольких ориентиров. Согласно некоторым вариантам осуществления настоящего изобретения, картографические данные 310 указывают на местоположение объектов (например, динамически размещаемых объектов с предварительно установленными координатами) по всей физической среде.
Согласно некоторым вариантам осуществления настоящего изобретения, динамические ориентиры соотносятся с динамически размещаемыми объектами с предварительно установленными координатами, такими как поддоны (например, поддон 112, представленный на фиг. 1) с размещенными на них единицами грузов (например, единицами груза 114, которые показаны на фиг. 1). Объект обладает известными геометрическими параметрами, которые определяются как эталонные данные о размещаемом объекте 342, описывающие ряд характерных признаков 312 вышеупомянутого объекта, которые, в свою очередь, используются навигационным модулем 320 для определения местоположения транспортного средства. Таким образом, когда промышленное транспортное средство выполняет задачу 330 по размещению объекта в физической среде, данное промышленное транспортное средство может определить положение размещенного объекта по прогнозированным данным о положении 318 и местоположению объекта на вилочном захвате промышленного транспортного средства. После этого навигационный модуль 320 может добавить информацию об ориентире 314 в картографические данные 310, регистрируя ориентир с характерными признаками по эталонным данным о размещаемом объекте 342; положение ориентира по месту, в которое был помещен объект; и погрешность положения объекта по прогнозированным данным о положении 318. После добавления в карту 310 данные размещаемые объекты могут служить в качестве ориентиров с наблюдаемыми признаками, которые позволяют проводить промышленное транспортное средство точно по курсу.
Согласно некоторым вариантам осуществления настоящего изобретения, размещаемые объекты могут однозначно идентифицироваться за счет использования штрих-кодов, радиочастотной метки-идентификатора (RFID), особой формы или какого-либо иного уникального признака, который может быть считан датчиками промышленного транспортного средства. Соответственно, картографические данные можно обновлять, внеся в них атрибуты размещаемого объекта. По завершении идентификации объекта возможна оценка данных о размещаемом объекте 342 с последующей передачей данных о характере размещаемого объекта, т.е. о его положении, на портативный компьютер 104. Если данные об идентифицированном объекте локально не сохранены как данные о размещенном объекте 342, то портативный компьютер может запросить соответствующую информацию из центрального компьютера 106. На центральном компьютере 106 хранится база данных о размещенных объектах 346 и полная карта 340, содержащая информацию обо всех объектах с предварительно установленными координатами. Данные об объектах с предварительно установленными координатами 342 могут быть использованы навигационным модулем 320 для определения навигационного положения, что подробнее описано ниже.
Согласно некоторым вариантам осуществления настоящего изобретения, промышленное транспортное средство не сохраняет сведения о своем положении при выключенном компьютере 104. В этом случае промышленное транспортное средство может не распознать свое текущее положении при включении компьютера 104. Промышленное транспортное средство может однозначно идентифицировать один или несколько объектов с предварительно установленными координатами за счет использования уникальных признаков, таких как штрих-код, радиочастотная метка-идентификатор (RFID), особая форма или какой-либо иной уникальный признак, который может быть считан датчиками промышленного транспортного средства. Объект с предварительно установленными координатами, обладающий уникальным признаком, используется для задания первоначального положения транспортного средства. Навигационный модуль может затем извлекать из карты иные характерные признаки и использовать их для определения местоположения.
Согласно некоторым вариантам осуществления настоящего изобретения, результаты определения местоположения 316 включают в себя совокупность данных, переданных множеством устройств 332. Эти данные содержат один или несколько характерных признаков объектов в физической среде. Согласно одному из вариантов осуществления настоящего изобретения, одна или несколько камер передают данные в виде изображений и/или видеоданные физической среды относительно транспортного средства. Согласно еще одному из вариантов осуществления настоящего изобретения, один или несколько лазерных сканеров (например, двухмерные лазерные сканеры) анализируют объекты в физической среде и собирают данные о различных физических признаках, таких как размер и форма. После этого полученные данные сравниваются с размерными моделями объектов. Лазерный сканер создает облако точек сканирования геометрических образцов на поверхности субъекта. Эти точки могут затем использоваться для извлечения наблюдаемых признаков субъекта. Камера записывает визуальную информацию, которая может быть обработана для извлечения характерных признаков, таких как линии, шаблоны, цвет и т.п.
Согласно некоторым вариантам осуществления настоящего изобретения, результаты определения местоположения 318 включают в себя предварительные данные о положении транспортного средства и/или его ориентации, которые в настоящем изобретении называются предвычисленным положением транспортного средства. Навигационный модуль 320 выдает обновленные оценочные данные на основании предшествующего положения транспортного средства в дополнение к результатам измерений датчиков (например, инерциального измерительного блока (IMU) или одометра), которые определяют величину перемещения. Навигационный модуль 320 может также использовать фильтр процессов для предварительной оценки погрешности и/или уровня шума с целью прогнозирования положения приближающегося транспортного средства и обновления стадий. Используя, к примеру, данные одометрии, навигационный модуль 320 рассчитывает расстояние, пройденное промышленным транспортным средством от места предшествующего положения, вместе с погрешностью положения по данным шумовой модели одометрического устройства. По результатам последующей сверки с картой физической среды, содержащей ориентиры объектов с характерными наблюдаемыми признаками, и сравнения фактически наблюдаемых признаков, поступающих от датчиков (например, с лазерного дальномера, камеры и т.п.), с данными вышеупомянутой карты, навигационный модуль 320 дает более точную оценку текущего положения транспортного средства и обновляет погрешность положения.
Согласно некоторым вариантам осуществления настоящего изобретения, навигационный модуль 320 содержит выполняемые процессором команды по определению местоположения промышленного транспортного средства 102 с использованием уникальных ориентиров. Согласно некоторым вариантам осуществления настоящего изобретения, для определения текущего положения транспортного средства навигационный модуль 320 может использовать преимущественно динамически размещаемые объекты с предварительно установленными координатами. Использование фильтра процессов для определения положения транспортного средства описано в Заявке на патент США, порядковый номер 13/116,600, поданной 26 мая 2011 года. Согласно этим вариантам осуществления настоящего изобретения, фильтр процессов (например, фильтр Калмана или иной фильтр подобного рода) может моделировать как погрешность положения объекта с предварительно установленными координатами, так и погрешность замеров характерных признаков объектов с предварительно установленными координатами, проведенных датчиками; а также формировать надежные прогнозы относительно местоположения 318, несмотря на повышенную погрешность. Для использования объектов с предварительно установленными координатами в качестве ориентиров при навигации - согласно одному из вариантов осуществления настоящего изобретения - эти объекты добавляются в качестве ориентиров в картографические данные 310 и удаляются из них по мере того, как транспортное средство выполняет задачи 330, например, по подъему или размещению поддонов и т.п.Данные об объектах с предварительно установленными координатами могут распределяться между разными транспортными средствами. Согласно еще одному из вариантов осуществления настоящего изобретения, объекты с предварительно установленными координатами добавляются в картографические данные 310 и удаляются из них по факту определенных действий, выполненных внешними относительно транспортного средства устройствами; например, в результате обновлений, проведенных с пользовательского интерфейса, автоматизированной системой складского учета и контроля, автоматизированной системой управления предприятием и т.п. Такие обновления изменяют данные о занятости конкретной ячейки; при этом объект с предварительно установленными координатами или заносится в карту с указанием соответствующего положения и погрешности, или удаляется из нее.
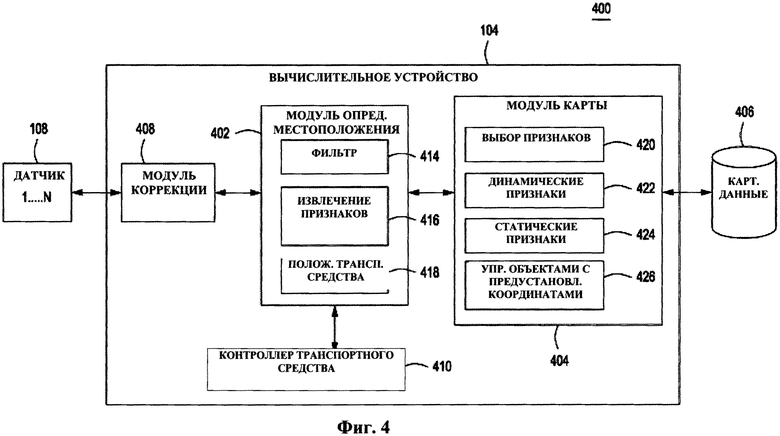
На фиг. 4 представлена функциональная блок-схема системы 400, точно определяющей местоположение промышленного транспортного средства согласно одному или нескольким вариантам осуществления настоящего изобретения. Система 400 включает в себя портативный компьютер 104, который связан с промышленным транспортным средством, таким как вилочный погрузчик, а также группу датчиков 108. Различные программные модули, установленные в портативном компьютере 104, вместе образуют навигационный модуль (как, например, навигационный модуль 320, представленный на фиг. 3).
Портативный компьютер 104 содержит различные программные модули (т.н. компоненты), выполняющие навигационные функции. К их числу относятся: модуль определения местоположения 402, модуль составления карт 404, модуль коррекции 408 и контроллер транспортного средства 410. Портативный компьютер 104 обеспечивает точное определение местоположения промышленного транспортного средства и добавляет в картографические данные 406 ориентиры динамически размещаемых объектов с предварительно установленными координатами. Модуль определения местоположения 402 может также включать в себя различные компоненты, такие как фильтр 414 и модуль извлечения признаков 416. Модуль составления карт 404 может содержать различные данные, такие как статические признаки 424 (т.е. такие признаки, которые не изменяются на карте; например признаки, определяемые стенами или неподвижными стойками и т.п.), и динамические признаки 422 (признаки, которые могут изменяться на карте;
например признаки, определяемые размещением поддонов или объектов с предварительно установленными координатами и т.п.). Модуль составления карт 404 может также содержать различные компоненты, такие как модуль выбора признаков 420 и модуль управления объектами с предварительно установленными координатами 426.
Согласно некоторым вариантам осуществления настоящего изобретения, модуль определения местоположения 402 обрабатывает скорректированные данные датчиков, полученные с модуля коррекции, и оперирует этими данными для предварительной оценки положения транспортного средства. Фильтр 414 обновляет прогноз по положению транспортного средства с учетом скорректированной оценки и/или погрешности наблюдений. Фильтр 414 определяет положение транспортного средства 418; он может также выдавать команды модулю составления карт 404 на обновление картографических данных 406. Положение транспортного средства 418, которое моделируется фильтром 414, относится к текущему положению и ориентации транспортного средства. Модуль определения местоположения 402 передает данные о положении транспортного средства 418 на модуль составления карт 404, а также передает эти данные на контроллер транспортного средства 410. Исходя из положения транспортного средства, контроллер 410 проводит промышленное транспортное средство по курсу к месту назначения.
Помимо фильтра 414, предназначенного для расчета положения транспортного средства 418, модуль определения местоположения 402 также содержит модуль извлечения признаков 416, предназначенный для извлечения известных стандартных признаков из скорректированных данных датчиков. Фильтр 414 сравнивает извлеченные признаки с динамическими признаками 422 и статическими признаками в модуле составления карт 404 для определения положения транспортного средства.
Модуль определения местоположения 414 может использовать данные о положении транспортного средства 418 и модуль составления карт 414 для уменьшения количества подлежащих исследованию признаков путем исключения невидимых признаков или признаков на заданном расстоянии от текущего положения транспортного средства. Модуль выбора признаков 420 управляет добавлением динамических признаков 422 в картографические данные 406 и их изменением. Некоторые из этих объектов представляют собой динамически размещаемые объекты с предварительно установленными координатами, для управления которыми предназначен модуль управления объектами с предварительно установленными координатами. Когда промышленное транспортное средство выполняет задание по размещению груза на складе (например, в среде 100, представленной на фиг. 1), контроллер транспортного средства 410 связывается с модулем определения местоположения 402 с напоминанием о том, что в карту должен быть внесен новый динамически размещаемый объект. Информация, предоставляемая модулю определения местоположения 402, будет включать в себя положение объекта относительно центра транспортного средства и погрешность его измерения; она может также содержать уникальный идентификатор объекта. Модуль определения местоположения 402 исследует текущее положение транспортного средства и его погрешность (например, прогнозированные данные о положении 318, представленные на фиг. 3), и предложит модулю управления объектами с предварительно установленными координатами 426 добавить один или несколько признаков в карту. Модуль управления объектами с предварительно установленными координатами 426 рассчитает положение объекта и его погрешность, после чего создаст ориентир (например, информацию об ориентире 314, представленную на фиг. 3) и эталонный набор признаков 422 для объекта, сверившись с моделью размещаемого объекта (например, с данными о размещаемом объекте 342, представленными на фиг.3).
Специалистам в данной области техники очевидно, что система 400 может использовать несколько вычислительных устройств для осуществления навигации в физической среде. Любой из программных модулей в составе вычислительного устройства 104 может быть размещен на разных аппаратных компонентах, в том числе на других вычислительный устройствах. Модуль составления карт 404, к примеру, может управляться с компьютера-сервера (например, с центрального компьютера 106, который показан на фиг. 1) по сети (например, по сети 302, представленной на фиг. 3) для соединения между собой различных мобильных вычислительных устройств с целью обновления и распределения между ними картографических данных 406 и данных о текущем положении транспортного средства.
Согласно некоторым вариантам осуществления настоящего изобретения, модуль коррекции 408 обрабатывает входные сообщения, поступающие из различных источников данных, таких как группа датчиков 108, характеризующихся разной частотой выборки/передачи сообщений и разной временной задержкой (внутри системы). Модуль коррекции 408 проверяет каждое сообщение по отдельности с тем, чтобы обеспечить логическую последовательность наблюдений. Такая проверка может выполняться вместо объединения данных с датчиков во избежание погрешностей при навигационном счислении пути. Следует отметить, что при разных интервалах выборки и разных временных задержках в системе, порядок, в котором поступают данные с датчиков, не будет соответствовать порядку, в котором входные сообщения датчиков становятся фактически доступными для вычислительного устройства 104.
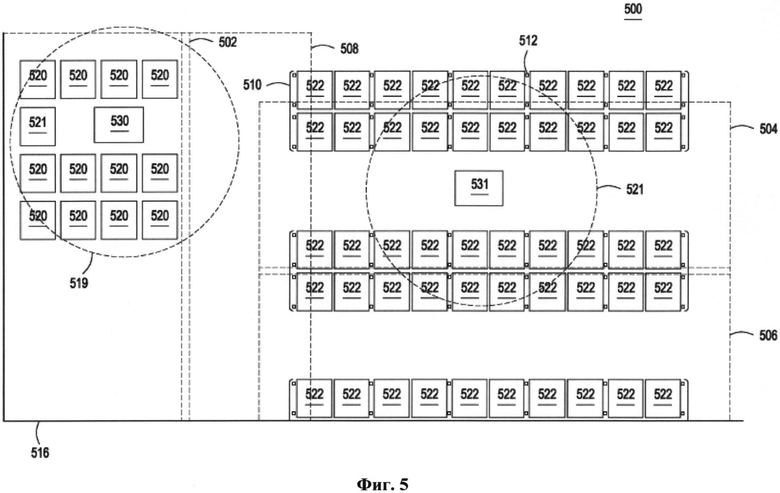
На фиг. 5 представлено схематическое изображение карты физической среды 500, включая множество динамически размещаемых объектов с предварительно установленными координатами, которые составляют большую часть имеющихся ориентиров согласно одному или нескольким вариантам осуществления настоящего изобретения. Карта 500 разбита на участки 502, 504, 506 и 508. Карты участков могут быть частично перекрывающимися или полностью раздельными. На карте 500 отображены все статические ориентиры, такие как стена 516, навигационный маяк 514, защитные устройства стеллажей 510, а также сами стеллажи 512. На карте 500 также представлено множество динамических объектов с предварительно установленными координатами, включая объекты 522, невидимые в данный момент для промышленного транспортного средства 530, которое может быть того же типа, что и транспортное средство 102, показанное на фиг. 1, так как они оба находятся за пределами участка 502 или вне зоны действия датчика 519. Кроме того, на карте 500 обозначены динамически размещаемые объекты с предварительно установленными координатами 520, визуально наблюдаемые транспортным средством 530. Промышленное транспортное средство 530 находится в зоне действия датчика 519 и перевозит объект 521.
Для занятия положения, которое позволит промышленному транспортному средству 530 поместить груз 521 в требуемое место в соответствии с поставленной задачей (например, задачей 330, представленной на фиг. 3), данное транспортное средство может полагаться только на динамически размещаемые объекты с предварительно установленными координатами 520, так как нет никаких статических ориентиров (например, опор стеллажей 512), визуально наблюдаемых в данный момент времени, и для точного определения местоположения используются объекты с предварительно установленными координатами. После того как промышленное транспортное средство 530 закончит размещение груза 521, этот груз может быть добавлен в карту в качестве нового динамически размещаемого объекта с предварительно установленными координатами, как это было описано выше. После добавления в карту объекта 521 вместе с характерными признаками и погрешностью положения данный объект может быть использован для определения местоположения. Эталонные данные об объекте с предварительно установленными координатами вместе с данными о его положении образуют характерные признаки, наблюдаемые со всех сторон объекта; таким образом, этот объект может быть использован в качестве навигационного ориентира с тех направлений, с которых ранее означенные признаки не наблюдались. Промышленное транспортное средство 530 или второе промышленное транспортное средство может удалить объект с предварительно установленными координатами из общей карты. После удаления объекта с предварительно установленными координатами из общей карты локальные карты каждого транспортного средства могут быть обновлены; при этом означенный объект с предварительно установленными координатами больше не сможет использоваться в качестве навигационного ориентира.
Для занятия определенного положения второе промышленное транспортное средство 531, которое может быть одного типа с транспортным средством 102, представленным на фиг. 1, может полагаться на динамически размещаемые объекты с предварительно установленными координатами и статические ориентиры 522. Объекты 522 размещаются в установочных местах/ячейках, описываемых как приблизительное местоположение поддона 112, на который можно поместить множество единиц груза 114. Объекты с предварительно установленными координатами могут размещаться в этих ячейках или изыматься оттуда с помощью автоматически управляемых промышленных транспортных средств, ручных тележек промышленного назначения, конвейерных транспортировочных систем и т.п. Когда установочное место занимается грузом, в карту вносится объект с предварительно установленными координатами. Картографические данные, которые используются в качестве навигационных ориентиров вместе с соответствующей погрешностью, передаются на промышленное транспортное средство. Подобным же образом, когда установочное место освобождается, объект с предварительно установленными координатами удаляется с карты. Картографические данные передаются на промышленное транспортное средство; а объект с предварительно установленными координатами, который ранее находился в данном конкретном установочном месте, удаляется с карты, на которой он был обозначен как навигационный ориентир.
На фиг. 1 представлена блок-схема способа 600 по назначению объекта с предварительно установленными координатами уникальным ориентиром с целью облегчения определения местоположения согласно одному или нескольким вариантам осуществления настоящего изобретения. Согласно некоторым вариантам осуществления настоящего изобретения этот способ может включать в себя размещение объекта в физической среде, назначение означенного объекта динамически размещаемым объектом с предварительно установленными координатами, сохранение местоположения означенного объекта на карте в качестве ориентира и использование таких ориентиров для проводки промышленного транспортного средства по курсу. Способ предусматривает идентификацию по меньшей мере одного динамически размещаемого объекта с предварительно установленными координатами в физической среде (при этом данный объект должен вписываться в закартарованную площадь физической среды); а также определение положения промышленного транспортного средства с помощью навигационного модуля после получения им информации о характерных признаках от датчиков транспортного средства, которые соответствуют признакам по меньшей мере одного динамически размещаемого объекта. Согласно некоторым вариантам осуществления настоящего изобретения, каждая стадия способа 600 может выполняться навигационным модулем (например, навигационным модулем 320, представленным на фиг. 3).
Согласно некоторым вариантам осуществления настоящего изобретения, некоторые стадии могут пропускаться или выполняться другими модулями. Навигационный модуль хранится на портативном компьютере (например, на портативном компьютере 104 согласно фиг. 1), который функционально связан с промышленным транспортным средством (например, с промышленным транспортным средством 102 согласно фиг. 1). Центральный компьютер (например, центральный компьютер 106, представленный на фиг. 1) содержит диспетчер карт (например, диспетчер карт 328, показанный на фиг. 3) для связи с промышленным транспортным средством, а также с еще одним или несколькими промышленными транспортными средствами. При выполнении задачи (например, задачи 330, показанной на фиг. 3) диспетчер карт передает команды на выполнение данной задачи. Например, диспетчер может передавать команды навигационному модулю на проводку промышленного транспортного средства по заданному маршруту, когда данное транспортное средство перемещает объект (например, поддон 112 с единицами груза 114 согласно фиг. 1) для его размещения в физической среде. Возвращаясь к фиг. 6, следует отметить, что способ 600 начинается со стадии 602 и заканчивается стадией 604.
На стадии 604 способ 600 управляет промышленным транспортным средством, исходя из одной или нескольких задач. Согласно некоторым вариантам осуществления настоящего изобретения способ 600 определяет местоположение промышленного транспортного средства и проводит его по определенному маршруту в физической среде при выполнении поставленных задач. Некоторые задачи требуют от промышленного транспортного средства загружать и разгружать объекты, такие как товарные единицы (например, множество единиц груза 114 согласно фиг. 1) или поддоны (например, множество поддонов 112 согласно фиг. 1), в заданных местах, которые называются установочными местами или ячейками. Как подробнее описано ниже, после разгрузки объект может быть определен в качестве уникального ориентира с целью облегчения процесса определения местоположения.
На стадии 606 способ 600 определяет, предусматривает ли текущая задача размещение объекта и должны ли объекты считаться объектами с предварительно установленными координатами, добавляемыми в картографические данные. Если это объект с предварительно установленными координатами, то способ 600 переходит к стадии 610. С другой стороны, если нет никаких объектов с предварительно установленными координатами, которые могли бы быть добавлены в картографические данные, способ 600 возвращается к исходной стадии. На стадии 610 способ 600 использует эталонные данные для выбора соответствующей информации о характерных признаках (например, информации о характерных признаках объектов 312 согласно фиг. 3) размещаемого объекта с предварительно установленными координатами. В каждой среде находится множество объектов, которые обрабатываются промышленным транспортным средством; при этом объекты каждого типа могут обладать разными характерными признаками. Более того, в момент размещения объекта промышленным транспортным средством обзор этого объекта датчиком/датчиками будет ограничен. Однако карта может содержать полное описание объекта с тем, чтобы другое промышленное транспортное средство, приближающееся к объекту с предварительно установленными координатами с какого-либо иного направления, могло идентифицировать этот объект как текущий объект с предварительно установленными координатами.
На стадии 614 способ 600 определяет положение объекта и его погрешность относительно текущего положения транспортного средства и его погрешности. Согласно некоторым вариантам осуществления настоящего изобретения, положение объекта будет замеряться с использованием датчиков транспортного средства (например, группы датчиков 108, представленной на фиг. 1). Результаты замеров этих датчиков допускают наличие погрешности данных с датчиков и погрешность положения датчика на транспортном средстве, которые характерны для датчика и установочного механизма. Согласно другим вариантам осуществления настоящего изобретения, объект может быть закреплен на оснастке транспортного средства (например, с помощью зажимов) или на вилочном захвате; при этом положение оснастки относительно некой отправной координаты транспортного средства может быть замерено и использовано в дальнейшей работе.
На стадии 616 способ 600 обновляет картографические данные (например, картографические данные 310, представленные на фиг. 3) вместе с ориентиром и информацией о характерных признаках объекта с предварительно установленными координатами. В карте будет сгенерирован новый динамический ориентир (например, информация об ориентире 314, представленная на фиг. 3), и этот ориентир будет включать в себя динамические признаки (например, информацию о характерных признаках объекта 312, представленную на фиг. 3), наблюдаемые с одной или нескольких сторон нового ориентира. Положение нового ориентира будет определяться относительно положения транспортного средства в глобальной системе координат и передаваться в центр ориентиров в соответствии с моделью размещаемого объекта (например, с данными о размещаемом объекте 342, представленными на фиг. 3). Согласно другим вариантам осуществления настоящего изобретения, карта может уже содержать невидимые динамические объекты, сгенерированные по местоположению установочных ячеек в соответствии с параметрическими данными, выведенными по размерам складских стоек, или в соответствии с правилами складирования применительно к блочным складским участкам; при этом описываемый способ включает в себя обновление карты с тем, чтобы сделать невидимый объект видимым, с указанием на погрешность положения реального объекта относительно сгенерированного положения.
На стадии 618 способ 600 передает обновленные картографические данные, например, еще одному или нескольким промышленным транспортным средствам. На стадии 6120 способ 600 определяет положение транспортного средства, используя уже обновленные картографические данные. Затем происходит переход к стадии 624. На стадии 624 выполнение способа 600 завершается.
Специалистам в данной области техники очевидно, что способ 600 может также использоваться для удаления из карты ориентира объекта с предустановленными координатами. На стадии 626 способ 600 определяет, предусматривает ли задача удаление объекта. Если да, то способ дает доступ к данным об объекте на стадии 628, удаляет объект с предустановленными координатами и обновляет карту на стадии 616. Обновленная карта после этого передается на промышленное транспортное средство на стадии 618.
Хотя вышеизложенное относится к вариантам осуществления настоящего изобретения, могут быть разработаны и иные варианты осуществления настоящего изобретения, не отходящие от его основной сути, которая определяется формулой изобретения, представленной ниже.
Изобретение относится к области навигационных систем для промышленных транспортных средств. Технический результат заключается в облегчении навигации автоматизированных транспортных средств. Технический результат достигается за счет способа, который включает в себя перемещение объекта по определенному маршруту в физической среде и размещение объекта в физической среде в качестве объекта с установленными координатами; обновление карты физической среды путем добавления в нее данных о размещаемом объекте, представляющих в карте физической среды динамически размещаемый объект с установленными координатами; сохранение обновленных картографических данных на портативном компьютере, который прилагается к промышленному транспортному средству, или на центральном компьютере, который связан сетью с ПК на промышленном транспортном средстве; управление промышленным транспортным средством, исходя из его положения в пространстве, которое определяется по данным датчиков и обновленным картографическим данным, путем проведения означенного промышленного транспортного средства по определенному маршруту в физической среде. 2 н. и 17 з.п. ф-лы, 6 ил.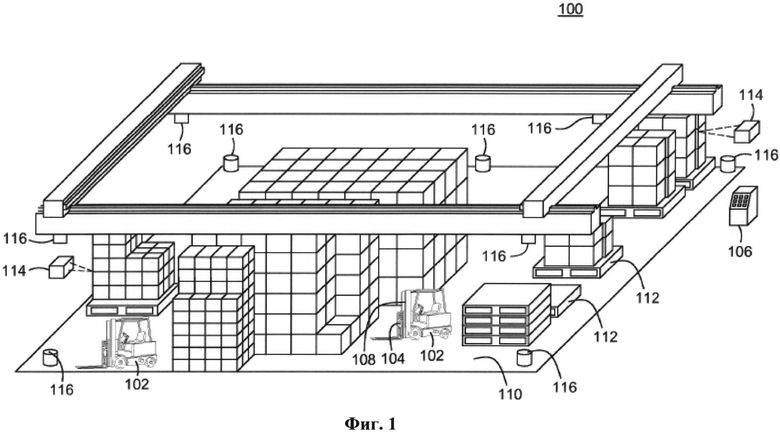
1. Способ использования динамически размещаемых объектов с предварительно установленными координатами в качестве ориентиров для управления промышленным транспортным средством, предусматривающий:
транспортировку объекта по определенному маршруту в физической среде и его размещение в определенном месте в означенной физической среде так, чтобы упомянутый объект стал динамически размещаемым объектом с предварительно установленными координатами в физической среде;
определение положения динамически размещаемого объекта с предварительно установленными координатами на основании по меньшей мере частично (1) данных о предположительном положении транспортного средства, хранящихся на центральном компьютере или на портативном компьютере, связанном с промышленным транспортным средством; и (2) местоположения размещаемого объекта относительно грузоподъемной рамы промышленного транспортного средства;
обновление карты физической среды путем использования определенного положения и добавления данных о размещаемом объекте, представляющих собой в карте физической среды динамически размещаемый объект с установленными координатами, с целью создания обновленной карты, в которой размещаемый объект после добавления в карту служит ориентиром с наблюдаемыми признаками и может быть использован при управлении промышленным транспортным средством с обеспечением доступа к обновленным картографическим данным;
сохранение обновленных картографических данных на портативном компьютере, присоединенном к промышленному транспортному средству, или на центральном компьютере, который связан сетью с промышленным транспортным средством; и
управление промышленным транспортным средством, на основании его навигационного положения, определяемого по данным с датчиков и обновляемым картографическим данным, путем проведения промышленного транспортного средства по определенному курсу в физической среде.
2. Способ по п. 1, предусматривающий также:
создание ориентира на базе данных по меньшей мере частично о размещаемом объекте; при этом данные о размещаемом объекте содержат характерные признаки данного объекта, положение ориентира с указанием на место, в которое был помещен объект, и погрешность положения объекта по данным о предположительном положении транспортного средства;
добавление ориентира в обновленные картографические данные; и
управление промышленным транспортным средством, исходя из его навигационного положения, определяемого по обновляемым картографическим данным, включая ориентиры.
3. Способ по п. 2, отличающийся тем, что:
размещаемый объект снабжен уникальным идентификатором; и
данный способ предусматривает использование датчика, установленного на промышленном транспортном средстве, для считывания уникального идентификатора.
4. Способ по п. 3, отличающийся тем, что данные о размещаемом объекте хранятся в центральном компьютере или на портативном компьютере вместе с данными, представляющими собой уникальный идентификатор.
5. Способ по п. 1, отличающийся тем, что:
данные о предположительном положении объектов хранятся на портативном компьютере или на центральном компьютере; и
промышленное транспортное средство содержит датчик для определения местоположения размещаемого объекта относительно грузоподъемной рамы промышленного транспортного средства.
6. Способ по п. 1, отличающийся тем, что объект транспортируется и размещается с использованием промышленного транспортного средства, автоматически управляемого промышленного транспортного средства или конвейерной транспортировочной системы.
7. Способ по п. 1, отличающийся тем, что:
управление промышленным транспортным средством предусматривает его переход из нерабочего в рабочее состояние, при котором текущее положение данного транспортного средства не известно; и управление промышленным транспортным средством затем осуществляется путем определения его текущего положения по обновленным картографическим данным и навигации означенного транспортного средства по заданному курсу в физической среде.
8. Способ по п. 1, отличающийся тем, что к динамически размещаемым объектам с предварительно установленными координатами относятся поддоны, нагруженные единицами груза.
9. Способ по п. 1, отличающийся тем, что динамически размещаемый объект обладает известными геометрическими параметрами; а также тем, что он предусматривает:
определение известных геометрических параметров как эталонных данных о размещаемом объекте, которые описывают набор признаков динамически размещаемого объекта с предварительно установленными координатами; и
управление промышленным транспортным средством по результатам определения его местоположения с использованием эталонных данных о размещаемом объекте.
10. Способ по п. 9, отличающийся тем, что:
динамически размещаемый объект с предварительно установленными координатами включает в себя поддон и размещенные на нем единицы груза; и
обновляемые картографические данные содержат модуль поддона и размещенных на нем единиц груза.
11. Способ по п. 1, отличающийся тем, что:
обновляемые картографические данные содержат невидимые динамические объекты, сгенерированные по местоположению установочных мест или ячеек согласно параметрическим данным, выведенным по размерам складских стоек, или в соответствии с правилами складирования применительно к блочным складским участкам; и
данный способ предусматривает обновление карты с тем, чтобы сделать невидимый объект видимым.
12. Способ по п. 1, отличающийся тем, что данные о размещаемом объекте, представляющем собой динамически размещаемый объект с предварительно установленными координатами, служат в качестве ориентира, содержащего характерные признаки, наблюдаемые с одной или нескольких сторон.
13. Способ по п. 1, отличающийся тем, что данные о размещаемом объекте получены по меньшей мере частично от датчика, закрепленного на промышленном транспортном средстве.
14. Способ по п. 1, отличающийся тем, что данные с датчиков, по которым определяется навигационное положение, содержат данные в виде изображений, данные лазерного дальномера, данные ультразвукового дальномера, данные датчика давления, данные кодового датчика положения или комбинации вышеозначенных данных.
15. Способ по п. 1, отличающийся тем, что данные о размещаемом объекте формируют большинство ориентиров, содержащихся в обновляемых картографических данных.
16. Способ по п. 1, отличающийся тем, что текущее положение транспортного средства определяется путем сверки с данными об ориентирах, которые состоят преимущественно из данных о размещаемых объектах.
17. Способ по п. 1, отличающийся тем, что текущее положение транспортного средства определяется путем сверки с данными об ориентирах, которые целиком состоят из данных о размещаемых объектах.
18. Способ по п. 1, отличающийся тем, что:
стадия управления промышленным транспортным средством на основании его навигационного положения, определяемого по данным с датчиков и обновляемым картографическим данным, содержит одну или несколько автоматических операций, выполняемых с помощью центрального компьютера или портативного компьютера, присоединенного к промышленному транспортному средству; и
вид автоматической операции можно выбрать, т.е. это может быть операция по перемещению транспортного средства, или отображение оповещения о состоянии транспортного средства, или сочетание того и другого.
19. Компьютер, присоединенный к промышленному транспортному средству, или связанный сетью с промышленным транспортным средством, содержащий навигационный модуль для управления промышленным транспортным средством по его навигационному положению, определяемому по данным с датчиков и по картографическим данным; при этом компьютер позволяет использовать динамически размещаемые объекты с предварительно установленными координатами в качестве ориентиров для управления промышленным транспортным средством согласно способу по п. 1.
| УСТРОЙСТВО ДЛЯ РАЗДЕЛЕНИЯ И ДОЗИРОВКИДЕТАЛЕЙ | 1973 |
|
SU453223A1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| НАВИГАЦИОННАЯ СИСТЕМА (ВАРИАНТЫ) | 2004 |
|
RU2383056C2 |

