Область техники, к которой относится настоящее изобретение
Представленные в настоящем документе варианты осуществления изобретения относятся к многорежимному навигационному управлению движением транспортных средств и, в частности, к системам и способам, которые призваны обеспечить множественность режимов управления транспортным средством и режимов его работы с целью повышения производительности указанного транспортного средства.
Предшествующий уровень техники настоящего изобретения
На территории многих складов используется один или несколько вилочных погрузчиков и/или иных транспортных средств, предназначенных для завозки грузов на склад, их отгрузки со склада и перемещения грузов внутри склада. Соответственно, многие текущие решения предусматривают наличие водителя погрузчика, который решает, какие грузы следует перемещать, и куда эти грузы должны быть перемещены. Хотя водители могут эффективно управлять транспортными средствами, выполняя поставленные задачи, их работа по перемещению товаров на территории складов обходится достаточно дорого. В этой связи многие текущие решения предусматривают полуавтоматический или полностью автоматизированный режим управления транспортным средством. И хотя такие изменения обеспечивают разнообразие режимов управления транспортным средством, зачастую работа транспортных средств в автоматическом режиме по-прежнему представляет некоторые сложности.
Краткое раскрытие настоящего изобретения
В настоящем описании представлено несколько вариантов реализации многорежимного навигационного управления движением транспортного средства. Некоторые варианты настоящего изобретения включают транспортное средство, снабженное запоминающим устройством и модулем управления транспортным средством (МУТ); при этом в состав МУТ входит контроллер. Кроме того, в ЗУ могут храниться данные о режимах работы и управления транспортным средством; при этом каждый из режимов управления связан с механизмом управления транспортным средством, а каждый из режимов работы связан с конкретной функцией транспортного средства. В некоторых вариантах осуществления настоящего изобретения модуль МУТ принимает управляющие команды от оператора системы и реализует их, используя контроллер. В некоторых вариантах осуществления настоящего изобретения, по меньшей мере, один из режимов управления сконфигурирован под осуществление автоматического управления транспортным средством; и, по меньшей мере, один из режимов управления представляет собой режим регулирования крутящего момента, обеспечивающий подачу сигнала мощности непосредственно на двигатель транспортного средства без использования контроллера.
В настоящем документе также описаны варианты осуществления настоящего изобретения в отношении способа многорежимного навигационного управления движением транспортного средства. Этот способ может включать прием модулем навигационного управления (МНУ) команды на автоматическое управление, определение команды на режим работы и команды на режим управления и определение типа режима работы, связанного с командой на режим работы. В некоторых вариантах осуществления настоящего изобретения предусмотрено определение типа режима управления, связанного с командой на режим управления; передача сигнала с модуля МНУ на модуль управления транспортным средством (МУТ), установленный на транспортном средстве, который идентифицирует операцию управления; и включение двигателя транспортного средства, исходя из типа режима работы и типа режима управления.
В настоящем документе также описаны варианты реализации транспортного средства согласно настоящему изобретению. В некоторых вариантах осуществления настоящего изобретения транспортное средство содержит запоминающее устройство и модуль управления транспортным средством (МУТ) с контроллером. В некоторых вариантах осуществления настоящего изобретения запоминающее устройство хранит данные о режимах работы и управления транспортным средством; при этом каждый из режимов управления сконфигурирован под осуществление управления транспортным средством, а каждый из режимов работы определяет конкретную функцию, выполняемую транспортным средством. В некоторых вариантах осуществления настоящего изобретения, по меньшей мере, один из режимов управления сконфигурирован под осуществление автоматического управления транспортным средством; и, по меньшей мере, один из режимов управления представляет собой режим регулирования крутящего момента, обеспечивающий подачу сигнала мощности непосредственно на двигатель транспортного средства без использования контроллера. В некоторых вариантах осуществления настоящего изобретения, по меньшей мере, в одном из режимов управления используется модуль МУТ и контроллер для управления транспортным средством.
Краткое описание фигур
Варианты осуществления настоящего изобретения, представленные в этом документе, носят исключительно иллюстративный характер, и не ограничивают объем настоящего изобретения, определенной формулой изобретения. Более полное понимание следующего ниже подробного описания иллюстративных вариантов осуществления настоящего изобретения может быть достигнуто в привязке к ссылкам на прилагаемые рисунки, на которых одни и те же структуры обозначаются одними и теми же номерами позиций; в частности:
На фиг. 1 показана вычислительная среда, в которой осуществляется навигационное управление движением транспортного средства согласно одному или нескольким вариантам осуществления настоящего изобретения, описанным и проиллюстрированным в этом документе;
На фиг. 2 представлена карта физической среды, обеспечивающая навигационное управление движением транспортного средства согласно вариантам осуществления настоящего изобретения, описанным и проиллюстрированным в этом документе;
На фиг. 3 показана вычислительная среда, обеспечивающая управляющую логику в модуле управления транспортным средством согласно одному или нескольким вариантам осуществления настоящего изобретения, описанным и проиллюстрированным в этом документе; и
На фиг. 4 представлена блок-схема реализации одного или нескольких режимов работы транспортного средства согласно вариантам осуществления настоящего изобретения, описанным и проиллюстрированным в этом документе.
Подробное раскрытие настоящего изобретения
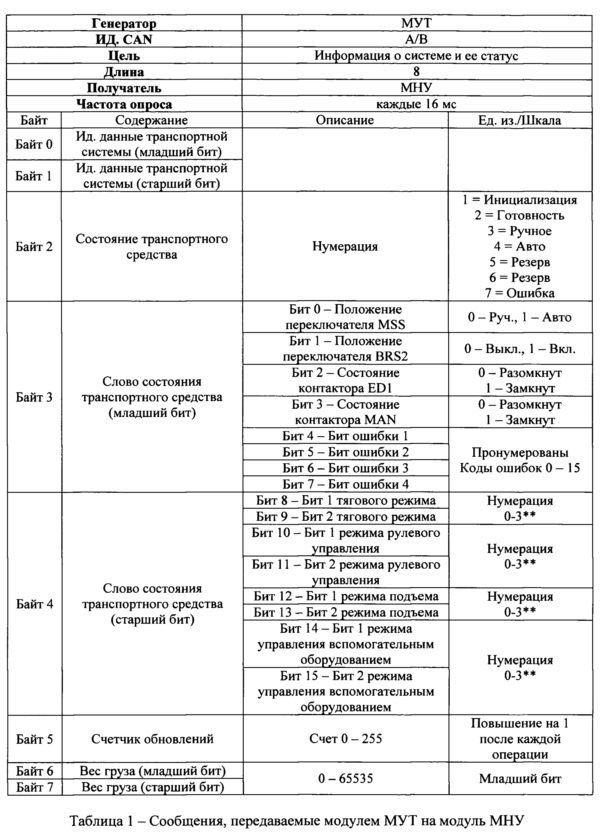
На фиг. 1 показана вычислительная среда, в которой осуществляется навигационное управление движением транспортного средства согласно одному или нескольким вариантам осуществления настоящего изобретения, описанным и проиллюстрированным в этом документе. Как показано на рисунке, сеть 100 может облегчать взаимодействие между навигационной системой 102, удаленным вычислительным устройством 104 и транспортным средством 106. Сеть 100 может представлять собой проводную и/или беспроводную локальную вычислительную сеть, глобальную вычислительную сеть и/или сеть иного типа для передачи информации. Навигационная система 102 включает вычислительное устройство, которое может быть установлено на складе или в иной физической среде. Навигационная система 102 может представлять собой сервер или иное вычислительное устройство, и она может быть сконфигурирована под передачу навигационных данных транспортному средству 106 и/или под прием навигационных данных с транспортного средства 106. Кроме того, удаленное вычислительное устройство 104, которое может представлять собой вычислительное устройство руководителя, сервер или иное вычислительное устройство, может быть сконфигурировано под обработку рабочих заданий. Рабочие задания могут определять местоположение груза, подлежащего перемещению, и/или содержать иную информацию подобного рода. Используя информацию, содержащуюся в рабочем задании, навигационная система 102 и/или удаленное вычислительное устройство 104 ставит задачу, которую должно выполнить транспортное средство. В дополнение к сказанному, навигационная система 102 может определять очередность, в которой такие задания должны выполняться транспортным средством 106. Навигационная система 102 может поддерживать связь с транспортным средством 106 для определения местоположения указанного транспортного средства 106. Используя информацию о местоположении транспортного средства 106, навигационная система 102 может более эффективно ставить задачи указанному транспортному средству 106. Кроме того, связь между навигационной системой 102 и транспортным средством 106 может включать в себя передачу координат пункта назначения и/или данных о маршруте транспортного средства 106. Маршрутные данные могут включать в себя множество сегментов маршрута, которые, в свою очередь, могут содержать одну или несколько линий и/или дуг с тем, чтобы транспортное средство 106 могло пройти путь от текущего местоположения до заданного пункта назначения. Однако в некоторых вариантах осуществления настоящего изобретения транспортное средство 106 получает координаты заданного пункта назначения и само определяет маршрут до указанного пункта назначения.
Вычислительная среда содержит также удаленное вычислительное устройство 104. Удаленное вычислительное устройство 104 может представлять собой сервер или вычислительное устройство иного рода, сконфигурированное таким образом, чтобы передавать навигационной системе 102 рабочие задания и/или иную информацию. В некоторых вариантах осуществления настоящего изобретения удаленное вычислительное устройство 104 может быть размещено на той же территории, что и навигационная система 102, тогда как в некоторых других вариантах осуществления настоящего изобретения удаленное вычислительное устройство 104 может располагаться на удаленном расстоянии от навигационной системы 102. Подобным же образом, в зависимости от конкретного варианта осуществления изобретения, удаленное вычислительное устройство 104 может быть сконфигурировано под одну или несколько разных сред и взаимодействовать с одной или несколькими разными навигационными системами.
На фиг. 1 показано также транспортное средство 106. В качестве транспортного средства 106 может выступать любой самоходный транспорт, используемый на складе, в частности, вилочный погрузчик, грузовая тележка и т.п. Кроме того, транспортное средство 106 может иметь одну или несколько систем управления, например, систему рулевого управления, тормозную систему, систему разгона, противобуксовочную систему и т.п. Предусмотрен также пользовательский интерфейс, датчики отслеживания положения (например, лазерные датчики, светолучевые датчики и т.п.) и вычислительная архитектура транспортного средства 110, которая может включать модуль управления транспортным средством (МУТ) 112 и модуль навигационного управления (МНУ) 114. Как будет подробнее описано ниже, МУТ 112 может быть сконфигурирован таким образом, чтобы облегчать инициируемое оператором управление транспортным средством 106 за счет использования ручного режима. Модуль МНУ 114 может быть сконфигурирован таким образом, чтобы облегчать инициируемое системой управление транспортным средством 106 за счет использования автоматического режима.
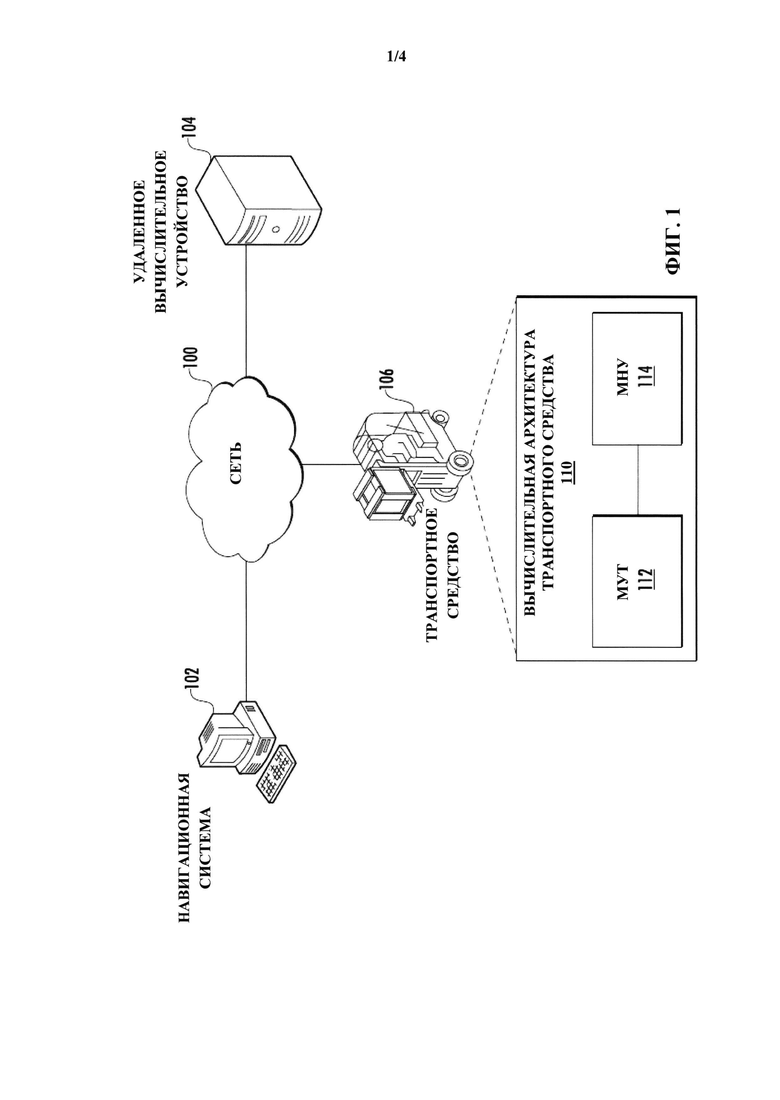
На фиг. 2 представлена карта физической среды, обеспечивающая навигационное управление движением транспортного средства согласно вариантам осуществления настоящего изобретения, описанным и проиллюстрированным в этом документе. Как показано на рисунке, карта физической среды 200 может воспроизводить такую среду, как склад, и может содержать множество грузов 202. Грузы 202 могут быть размещены по заданной схеме, и не только по горизонтали (на полу в направлениях «x» и «y»), но и по вертикали (в направлении «z»). Как было вкратце описано выше, транспортное средство 106 может управляться в ручном режиме оператором, который подает сигнал на ручное управление транспортным средством 106. После этого оператор может реализовать функцию ручного управления с тем, чтобы вручную провести транспортное средство 106 в заданную точку, выполнить поставленную задачу и перейти к выполнению следующего задания.
Если на транспортное средство 106 подать команду, инициирующую автоматическое управление, то транспортное средство 106 сможет работать в автоматическом режиме и получать команды на автоматическое выполнение операций, реализуя тем самым функцию автоматического управления. Таким образом, транспортное средство 106 может выполнять поставленные задачи без участия оператора. Соответственно, транспортное средство 106 может получить данные о еще одном местоположении (или о заданном маршруте) от навигационной системы 102. Используя эту информацию, транспортное средство 106 может дойти до требуемой точки, выполнить задание и перейти в следующую точку.
Например, если на данный момент транспортное средство 106 работает в автоматическом режиме, то транспортное средство 106 может получить задание, данные о пункте назначения (например, D212) и/или данные о маршруте до точки D212. В зависимости от полученной информации, транспортное средство 106 может рассчитать маршрут до заданной конечной точки, после чего приступить к выполнению задания. В данном конкретном примере полученное задание требует от транспортного средства 106 забрать груз, находящийся по адресу D212. Для перемещения по заданному маршруту из текущего местоположения до конечной точки транспортное средство 106 может использовать датчики и картографические данные. В некоторых вариантах осуществления настоящего изобретения транспортное средство 106 содержит светолучевой датчик. Светолучевой датчик может определять относительное положение транспортного средства 106 по точкам верхнего освещения. Основываясь на этой и/или иной информации (например, данных лазерных датчиков, показаний одометра и т.п.), транспортное средство 106 (и/или навигационная система 102) может гарантировать, что указанное транспортное средство движется по требуемому маршруту.
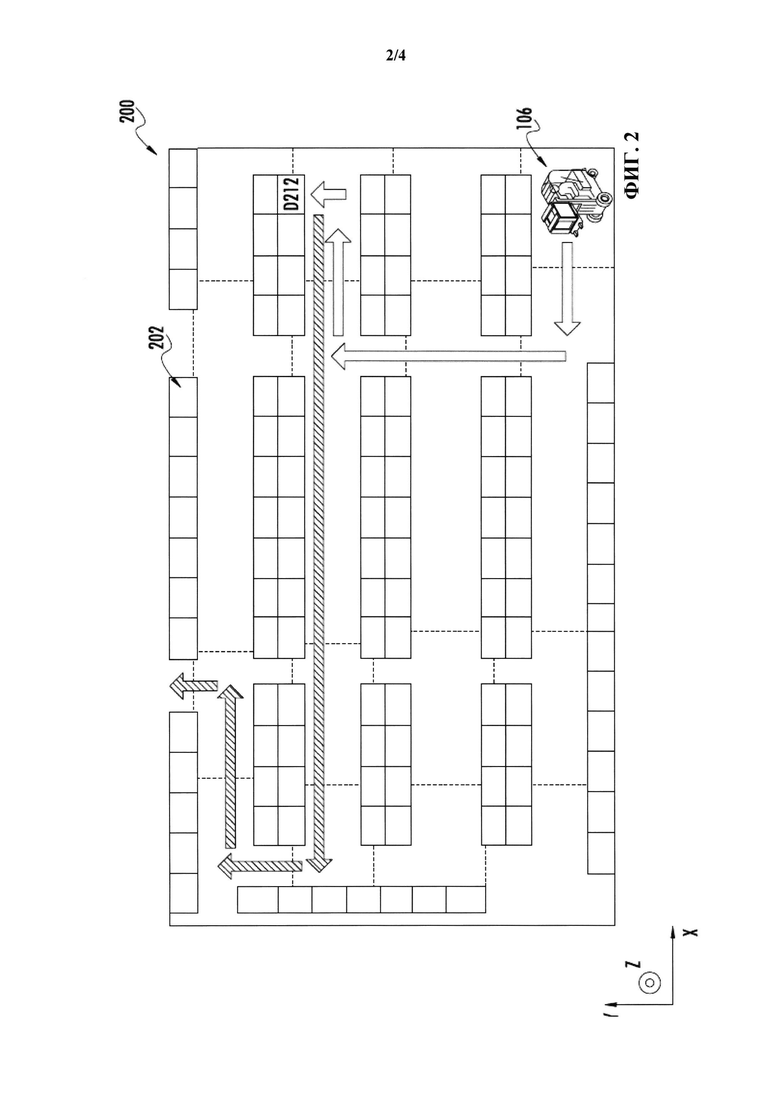
На фиг. 3 показана вычислительная среда, обеспечивающая управляющую логику в модуле МУТ 112 согласно одному или нескольким вариантам осуществления настоящего изобретения, описанным и проиллюстрированным в этом документе. На проиллюстрированном примере модуль МУТ 112 включает процессор 330, средства ввода/вывода 332, компонент хранения данных 336 (в который хранятся данные о маршруте 338а, картографические данные 338b и/или иные данные) и запоминающее устройство 140. Запоминающее устройство 140 может представлять собой энергозависимое и/или энергонезависимое ЗУ и, в данном качестве, включать в себя запоминающее устройство с произвольной выборкой (в том числе SRAM, DRAM и/или иные типы RAM), флэш-память, карту памяти SD, регистрирующие устройства, компакт-диски (CD), универсальные цифровые диски (DVD) и/или иные типы энергонезависимых машиночитаемых носителей. В зависимости от конкретного варианта осуществления настоящего изобретения, энергонезависимый машиночитаемый носитель может находиться или в модуле МУТ 112, и/или вне модуля МУТ 112.
Кроме того, в запоминающем устройстве 140 может храниться операционная логика 342, логика регулирования тяги 344а, логика рулевого управления 344b, логика управления подъемным оборудованием 344с и логика управления вспомогательным оборудованием 344d. Операционная логика 342 может включать в себя операционную систему и/или иные программные средства для управления компонентами модуля МУТ 112. В логике регулирования тяги 344а может быть предусмотрен один или несколько алгоритмов и параметров, обеспечивающих оптимальную тягу через модуль регулирования тяги (МРТ) транспортного средства 106. Логика рулевого управления 344b может содержать один или несколько алгоритмов и параметров, обеспечивающих оптимальное рулевое управление транспортным средством 106 через модуль рулевого управления (МРУ). В логике управления подъемным оборудованием 344с может быть предусмотрен один или несколько алгоритмов и параметров, обеспечивающих оптимальное управление подъемным оборудованием транспортного средства 106. Логика управления подъемным оборудованием 344d может содержать один или несколько алгоритмов и параметров, облегчающих управление вспомогательным оборудованием транспортного средства 106, например, через блок гидросистемы. На фиг. 3 показан также интерфейс местной связи 346, который может быть реализован в виде шины или иного интерфейса связи, обеспечивающего взаимодействие между компонентами модуля МУТ 112.
Процессор 330 может содержать компонент обработки данных, предназначенный для приема и выполнения команд (поступающих, например, с компонента хранения данных 336 и/или запоминающего устройства 140). Средства ввода/вывода 332 могут включать в себя монитор, систему позиционирования, клавиатуру, сенсорную панель, мышь, принтер, устройство захвата изображений, микрофон, динамик, гироскоп, компас и/или иные устройства приема, передачи и/или обработки данных; и/или могут быть сконфигурированы таким образом, чтобы взаимодействовать с перечисленными выше устройствами. Оборудование сетевого интерфейса 334 может включать в себя любое проводное и/или беспроводное сетевое оборудование, в том числе антенну, модем, LAN-порт, карту беспроводного Интернета (Wi-Fi), карту WiMax, оборудование мобильной связи и/или иные аппаратные средства для взаимодействия с прочими сетями и/или устройствами; и/или может быть сконфигурированы таким образом, чтобы взаимодействовать с перечисленными выше устройствами. С помощью указанных средств облегчается взаимодействие между модулем МУТ 112 и прочими вычислительными устройствами.
Следует понимать, что компоненты, показанные на фиг. 3, следует рассматривать исключительно как иллюстративные и не ограничивающие объем настоящего изобретения. Хотя компоненты, представленные на фиг. 3, находятся в модуле МУТ 112, такая конфигурация приведена лишь в качестве примера. В некоторых вариантах осуществления настоящего изобретения один или несколько компонентов могут располагаться вне модуля МУТ 112. Следует также понимать, что хотя на фиг. 3 модуль МУТ 112 представлен в виде единого устройства, такая конфигурация также приведена лишь в качестве примера. В некоторых вариантах осуществления изобретения логика регулирования тяги 344а, логика рулевого управления 344b, логика управления подъемным оборудованием 344с и/или логика управления вспомогательным оборудованием 344d могут находиться на разных устройствах. Кроме того, хотя на приведенном примере модуля МУТ 112 элементы логики 344а, 344b, 344с и 344d представлены в виде отдельных компонентов, это также всего лишь пример. В некоторых вариантах осуществления изобретения требуемую функциональность модуля МУТ 112 может обеспечить единый логический блок.
Следует понимать, что модуль МУТ 112 может связываться с МНУ 114 для координации различных условий ручного и автоматического управления транспортным средством 106. В Таблице 1 ниже приведен пример данных, которые могут быть переданы с МУТ 112 на МНУ 114, в зависимости от типа используемого модуля МУТ.
Как показывает Таблица 1, модуль МУТ 112 может передавать данные о транспортном средстве непосредственно на модуль МНУ 114 через интерфейс навигационного управления 116 (фиг. 1). Соответственно, модуль МУТ 112 может содержать пакет или поток данных, включающий множество байт данных (например, 4, 8, 16, 32 байт и т.д.). В примере, приведенном в Таблице 1, данные структурированы в виде 8-байтовой системы передачи данных, где байты 0 и 1 представляют собой идентификаторы транспортного средства. Байт 2 может быть использован для определения состояния транспортного средства. К примеру, инициализацию можно идентифицировать как первое состояние транспортного средства; при этом режимы готовности, ручного и автоматического управления будут представлены в качестве дополнительных состояний транспортного средства. Если при определении состояния транспортного средства произошла ошибка, для такого случая может быть предусмотрена определенная конфигурация байтов.
Подобным же образом, для определения состояния транспортного средства могут быть использованы байты 3 и 4. К примеру, бит 0 может использоваться для определения положения переключателя MSS 302 (ручной/авто). Бит 1 может быть использован для идентификации положения тормозного переключателя BRS1 (Вкл./Выкл.). Бит 2 может быть использован для определения состояния контактора ED1 (разомкнут/замкнут). Бит 3 может быть использован для определения состояния ручного контактора 305. Биты 4-7 могут обозначать различные коды ошибок в диапазоне от 0 до 15. Подобным же образом, бит 4 используется для идентификации типа рабочего режима, такого как тяговый режим, режим рулевого управления, режим работы подъемного оборудования и режим работы вспомогательного оборудования. Байт 5 может быть использован в качестве счетчика обновлений, тогда как байты 6 и 7 - для определения веса груза на вилочном захвате.
Подобным же образом в Таблице 2 представлены данные, которые могут быть переданы с модуля МНУ 114 на модуль МУТ 112, в зависимости от конкретного типа МНУ 114.


Как видно из Таблиц 1 и 2, модуль МУТ 112 может передавать на модуль МНУ 114 сообщения, касающиеся конкретного режима работы, который может быть использован в байте 4. В частности, биты 8 и 9 зарезервированы для тягового режима (используя логику регулирования тяги 344а); биты 10 и 11 зарезервированы для режима рулевого управления (используя логику рулевого управления 344b); биты 12 и 13 зарезервированы для режима управления подъемным оборудованием (используя логику управления подъемным оборудованием 344с), а биты 14 и 15 зарезервированы для режима управления вспомогательным оборудованием (используя логику управления вспомогательным оборудованием 344d). Как видно из Таблицы 3, когда транспортное средство 106 функционирует в тяговом режиме, в режиме рулевого управления, в режиме управления подъемным оборудованием или в режиме управления вспомогательным оборудованием, выбор должен быть сделан с учетом режима управления, который будет использован. К примеру, режим регулирования числа оборотов с коэффициентом ПИ-усиления, заданным по умолчанию, может быть использован в тех случаях, когда транспортное средство 106 автоматически управляется модулем МНУ 114. Когда работой транспортного средства 106 управляет модуль МНУ 114, режим регулирования числа оборотов с коэффициентом ПИ-усиления, заданным по умолчанию, может быть использован вместе со скоростным параметром для регулирования быстроты реагирования транспортного средства 106. В этой связи, системный администратор (или какое-либо третье лицо) может выбрать значения ПИ, которые были использованы для настройки работы транспортного средства 106 в ручном режиме. Режим регулирования числа оборотов с регулируемым коэффициентом ПИ-усиления аналогичен вышеописанному режиму, за исключением того, что коэффициенты ПИ-усиления могут динамически регулироваться пользователем системы или системным администратором, в зависимости от конкретной операции, которую выполняет транспортное средство 106. К примеру, транспортное средство 106 может определять вес перевозимого им груза. Если транспортное средство 106 перевозит груз, вес которого удовлетворяет требованию в отношении заданного максимального значения, то транспортное средство 106 посылает соответствующий сигнал в навигационную систему 102 (и/или на модуль МНУ 114), после чего навигационная система 102 (и/или модуль МНУ 114) может изменить коэффициенты ПИ-усиления, чтобы ускорить отклик на команды.
Дополнительно предусмотрен режим регулирования крутящего момента. В частности, в то время как прочие режимы управления предусматривают регулирование числа оборотов через контроллер, такой как ПИД-регулятор, ПИ-регулятор, регулятор с нечетким алгоритмом, Н-бесконечность-регулятор и/или иные контроллеры подобного рода, передающие управляющую команду и/или сигнал мощности на двигатель, режим регулирования крутящего момента использует модуль МРТ, который может быть выполнен в виде силового модуля, использующего команду на создание крутящего момента и передающего сигнал мощности непосредственно на двигатель без использования контроллера, входящего в состав модуля МУТ 112. Таким образом, режим регулирования крутящего момента может обеспечить пользователю системы более полный контроль над транспортным средством 106, работающим в автоматическом режиме. Однако это может потребовать более высокого уровня компетентности со стороны специалиста-интегратора автоматизированной транспортной системы для конфигурирования транспортного средства 106. Режим регулирования положения может использовать позиционный параметр и передать команду на изменение положения на модуль МУТ 112, перекладывая тем самым функцию точного позиционирования транспортного средства 106 с модуля МНУ 114 на модуль МУТ 112.
Таблица 3 также показывает, что каждый из режимов работы (тяговый режим, режим рулевого управления, режим управления подъемным оборудованием и режим управления вспомогательным оборудованием) может быть использован с любым из множества разных режимов управления (режим регулирования числа оборотов с коэффициентом ПИ-усиления, заданным по умолчанию; режим регулирования числа оборотов с регулируемым коэффициентом ПИ-усиления; режим регулирования крутящего момента; и режим регулирования положения). В частности, если транспортное средство 106 работает в тяговом режиме, для регулирования тягового усилия транспортного средства 106 может быть использована логика регулирования тяги 344а. Если транспортное средство 106 работает в режиме рулевого управления, параметры управления транспортным средством 106 предоставляются логикой рулевого управления 344b. В режиме управления подъемным оборудованием управляющие параметры, регулирующие подъем вилочного захвата транспортного средства 106, предоставляются логикой управления подъемным оборудованием 344с. В режиме управления вспомогательным оборудованием управляющие параметры, регулирующие один или несколько вспомогательных механизмов транспортного средства 106, предоставляются логикой управления вспомогательным оборудованием 344d. Каждый из указанных режимов управления может быть использован с любым из режимов работы, отображенных в таблице 3.
На фиг. 4 представлена блок-схема реализации одного или нескольких режимов работы транспортного средства 106 согласно вариантам осуществления настоящего изобретения, описанным и проиллюстрированным в этом документе. Как показано на рисунке, в блоке 430 модуль МНУ 114 получает команду на активизацию автоматического режима управления транспортным средством 106. В блоке 432, определяется команда на режим работы и команда на режим управления. В блоке 434 определяется тип рабочего режима по команде на рабочий режим. В блоке 436 определяется тип режима управления по команде на режим управления. В блоке 438 модуль МНУ 114 подает сигнал на модуль МУТ 112, установленный на транспортном средстве 106, который идентифицирует операцию управления. Операция управления может соотноситься с типом рабочего режима и типом режима управления. В блоке 440 активируется двигатель транспортного средства 106, исходя из типа рабочего режима и типа режима управления.
Хотя выше приведены и описаны конкретные примеры осуществления изобретения, следует понимать, что возможны различные изменения и дополнения, не выходящие за пределы существа и объема настоящего изобретения, определенные формулой изобретения. Более того, хотя в настоящем описании представлены различные аспекты заявленного предмета изобретения, эти аспекты не обязательно должны использоваться в сочетании. Поэтому прилагаемая формула изобретения охватывает все такие изменения и дополнения в пределах существа заявленного предмета изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ НАВИГАЦИЕЙ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) И ТРАНСПОРТНОЕ СРЕДСТВО НА ЕЕ ОСНОВЕ (ВАРИАНТЫ) | 2012 |
|
RU2621401C2 |
| СИСТЕМА НАВИГАЦИИ ВИЛЬЧАТЫХ ПОГРУЗЧИКОВ | 2012 |
|
RU2575810C2 |
| УСОВЕРШЕНСТВОВАННОЕ ОПРЕДЕЛЕНИЕ ХАРАКТЕРИСТИК ДОРОГИ ДЛЯ АДАПТИВНОГО РЕЖИМА ВОЖДЕНИЯ | 2016 |
|
RU2707483C2 |
| СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2509668C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО, СПОСОБ И СИСТЕМА ДЛЯ ПЛАНИРОВАНИЯ РЕЖИМОВ ТРАНСПОРТНОГО СРЕДСТВА С ИСПОЛЬЗОВАНИЕМ ИЗУЧЕННЫХ ПРЕДПОЧТЕНИЙ ПОЛЬЗОВАТЕЛЯ | 2017 |
|
RU2683902C2 |
| ЭЛЕКТРИЧЕСКИЙ ВЕЛОСИПЕД | 2015 |
|
RU2682945C2 |
| ЭЛЕКТРИЧЕСКИЙ ВЕЛОСИПЕД | 2015 |
|
RU2697178C2 |
| ЭЛЕКТРИЧЕСКИЙ ВЕЛОСИПЕД | 2015 |
|
RU2688116C2 |
| ЭЛЕКТРИЧЕСКИЙ ВЕЛОСИПЕД | 2015 |
|
RU2679518C2 |
| ЭЛЕКТРИЧЕСКИЙ ВЕЛОСИПЕД | 2015 |
|
RU2684825C2 |

Предложен способ многорежимного навигационного управления движением транспортного средства, обеспечивающий множественность режимов управления транспортным средством и режимов его работы. При осуществлении способа, команда на автоматическое управление поступает в модуль навигационного управления (МНУ), который сконфигурирован под реализацию режима автоматического управления транспортным средством. Определяют команду на режим работы и команду на режим управления. Определяют тип режима работы, связанного с командой на режим работы. Определяют тип режима управления, связанного с командой на режим управления. Передают сигнал с модуля МНУ на модуль управления транспортным средством (МУТ), установленный на погрузчике, который идентифицирует операцию управления. Операцию управления соотносят с типом рабочего режима и типом режима управления. Включают двигатель транспортного средства, исходя из типа режима работы и типа режима управления. Предложены также система обеспечения множественности режимов управления транспортным средством и режимов его работы, а также транспортное средство. Достигается повышение производительности указанного транспортного средства. 3 н. и 18 з.п. ф-лы, 4 ил., 3 табл. 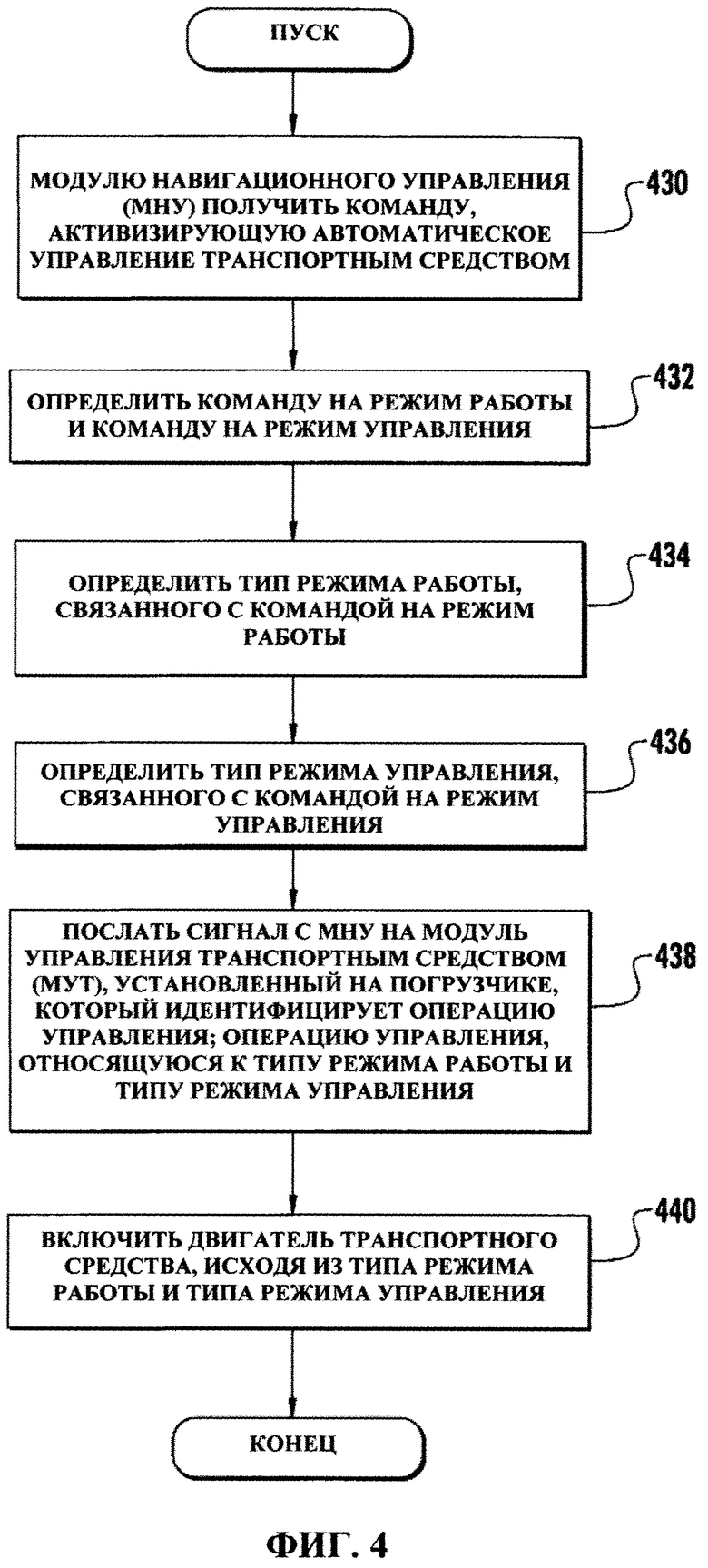
1. Система обеспечения множественности режимов управления транспортным средством и режимов его работы, которая включает в себя запоминающее устройство и модуль управления транспортным средством (МУТ), в состав которого входит контроллер МУТ, отличающаяся тем, что:
для транспортного средства предусмотрены режимы управления, в том числе ручной режим управления транспортным средством, инициируемый оператором, и автоматический режим управления транспортным средством, инициируемый системой;
запоминающее устройство хранит данные о режимах работы и управления транспортным средством; при этом каждый из режимов управления связан с механизмом управления транспортным средством, а каждый из режимов работы связан с конкретной функцией транспортного средства;
модуль МУТ принимает управляющие команды от оператора системы и реализует их, используя контроллер;
по меньшей мере, один из режимов управления сконфигурирован под осуществление автоматического управления транспортным средством в автоматическом режиме; и тем, что
по меньшей мере, один из режимов управления представляет собой режим регулирования крутящего момента, обеспечивающий подачу сигнала мощности непосредственно на двигатель транспортного средства без использования контроллера МУТ.
2. Система по п. 1, отличающаяся тем, что в ней предусмотрен, по меньшей мере, один из следующих режимов работы: тяговый режим, режим рулевого управления, режим управления подъемным оборудованием и режим управления вспомогательным оборудованием.
3. Система по п. 1, отличающаяся тем, что в ней предусмотрена, по меньшей мере, одна из следующих функций транспортного средства: обеспечение тяги, рулевое управления, подъем грузов и эксплуатация вспомогательного оборудования транспортного средства.
4. Система по п. 1, отличающаяся тем, что режимы управления включают в себя режим регулирования числа оборотов с коэффициентом ПИ-усиления, заданным по умолчанию; режим регулирования числа оборотов с регулируемым коэффициентом ПИ-усиления; и режим регулирования положения.
5. Система по п. 4, отличающаяся тем, что в ответ на реализацию, по меньшей мере, одного из режимов управления модуль МУТ передает управляющую команду - через контроллер МУТ - на управление транспортным средством.
6. Система по п. 5, отличающаяся тем, что:
модуль МУТ передает управляющие команды - через контроллер МУТ - на силовой модуль,
силовой модуль включает в себя, по меньшей мере, один из следующих модулей: модуль регулирования тяги, модуль рулевого управления и блок гидросистемы, и тем, что
силовой модуль подает сигнал мощности на двигатель транспортного средства.
7. Система по п. 1, отличающаяся тем, что механизм управления транспортным средством предусматривает, по меньшей мере, один из следующих вариантов: управление транспортным средством посредством скоростного параметра, управление транспортным средством посредством позиционного параметра и управление транспортным средством посредством сигнала мощности.
8. Система по п. 1, отличающаяся тем, что транспортное средство содержит модуль навигационного управления (МНУ); при этом модуль МУТ передает на модуль МНУ информацию о выбранном режиме управления и выбранном режиме работы, который реализуется в настоящий момент времени транспортным средством.
9. Система по п. 1, отличающаяся тем, что транспортное средство содержит модуль МНУ; при этом модуль МНУ передает на модуль МУТ данные о выбранном режиме управления и выбранном режиме работы для их реализации транспортным средством.
10. Система по п. 1, отличающаяся тем, что транспортное средство содержит модуль МНУ; при этом в тех случаях, когда управление транспортным средством осуществляется модулем МНУ, используется режим регулирования числа оборотов с коэффициентом ПИ-усиления, заданным по умолчанию; при этом значения коэффициентов ПИ-усиления для регулировки быстроты отклика транспортного средства устанавливаются системным администратором.
11. Система по п. 1, отличающаяся тем, что для регулирования коэффициентов ПИ-усиления используется режим регулирования числа оборотов с регулируемым коэффициентом ПИ-усиления, в зависимости от конкретной операции, выполняемой транспортным средством.
12. Система по п. 11, отличающаяся тем, что транспортное средство содержит модуль МНУ, в котором могут регулироваться коэффициенты ПИ-усиления.
13. Система по п. 1, отличающаяся тем, что транспортное средство содержит модуль МНУ; при этом режимы управления включают в себя режим регулирования положения, и при выборе указанного режима регулирования положения управление положением транспортным средством передается с модуля МНУ на модуль МУТ.
14. Система по п. 1, отличающаяся также тем, что она включает в себя навигационную систему и удаленное вычислительное устройство; при этом:
в транспортном средстве предусмотрен модуль МНУ;
навигационная система взаимодействует с модулем МНУ для передачи команд автоматического управления на транспортное средство; и
удаленное вычислительное устройство обрабатывает рабочее задание, определяет, сможет ли транспортное средство его выполнить, и устанавливает связь с навигационной системой для передачи команд автоматического управления.
15. Система по п. 1, отличающаяся тем, что контроллер МУТ представляет собой или ПИД-регулятор, или ПИ-регулятор, или регулятор с нечетким алгоритмом, или Н-бесконечность-регулятор.
16. Способ многорежимного навигационного управления движением транспортного средства, обеспечивающий множественность режимов управления транспортным средством и режимов его работы, отличающийся тем, что он предусматривает:
поступление команды на автоматическое управление в модуль навигационного управления (МНУ), который сконфигурирован под реализацию режима автоматического управления транспортным средством;
определение команды на режим работы и команды на режим управления;
определение типа режима работы, связанного с командой на режим работы;
определение типа режима управления, связанного с командой на режим управления;
передачу сигнала с модуля МНУ на модуль управления транспортным средством (МУТ), расположенный на самом транспортном средстве, который идентифицирует операцию управления; при этом операция управления соотносится с типом рабочего режима и типом режима управления; и
активацию двигателя транспортного средства, исходя из типа режима работы и типа режима управления.
17. Способ по п. 16, отличающийся тем, что он определяет тип рабочего режима, в том числе, определяет, идентифицирует ли команда на рабочий режим, по меньшей мере, один из следующих режимов работы: тяговый режим, режим рулевого управления, режим управления подъемным оборудованием и режим управления вспомогательным оборудованием.
18. Способ по п. 16, отличающийся тем, что он определяет тип режима управления, в том числе, определяет, идентифицирует ли команда на режим управления, по меньшей мере, один из следующих режимов: режим регулирования числа оборотов с коэффициентом ПИ-усиления, заданным по умолчанию; режим регулирования числа оборотов с регулируемым коэффициентом ПИ-усиления; режим регулирования крутящего момента; и режим регулирования положения.
19. Способ по п. 16, отличающийся тем, что он предусматривает использование модуля регулирования тяги для активации двигателя.
20. Транспортное средство, отличающееся тем, что оно содержит запоминающее устройство и модуль управления транспортным средством (МУТ), в состав которого входит контроллер; при этом:
транспортное средство может работать в ручном режиме, когда управление транспортным средством осуществляет оператор, и в автоматическим режиме, когда транспортным средством управляет система;
в запоминающем устройстве хранятся данные о режимах работы и режимах управления; при этом каждый из режимов управления сконфигурирован под осуществление управления транспортным средством, а каждый из режимов работы определяет конкретную функцию, выполняемую транспортным средством;
по меньшей мере, один из режимов управления сконфигурирован под осуществление автоматического управления транспортным средством;
по меньшей мере, один из режимов управления представляет собой режим регулирования крутящего момента, обеспечивающий подачу сигнала мощности непосредственно на двигатель транспортного средства без использования контроллера МУТ; и
по меньшей мере, один из режимов управления использует модуль МУТ и контроллер МУТ для управления транспортным средством.
21. Транспортное средство по п. 20, отличающее тем, что:
в транспортном средстве реализован, по меньшей мере, один рабочий режим;
в транспортном средстве реализован, по меньшей мере, один режим управления; и тем, что
МУТ передает на модуль навигационного управления (МНУ) данные, по меньшей мере, одного рабочего режима и, по меньшей мере, одного режима управления.
| Вилочный электропогрузчик | 1972 |
|
SU459883A3 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |

