Изобретение относится к области сельского хозяйства, к технологиям выращивания животных и птицы с выборочным контролем их живой массы в ходе самого процесса выращивания в животноводческих и птицеводческих помещениях и может быть использовано в отраслях промышленного животноводства и птицеводства.
Известны способ и устройство для выращивания птицы, в котором датчик временной продуктивности одной птицы содержит силоизмерительные датчики и счетчики количеств взвешиваний (патент РФ №2340172 C1, A01K 29/00. Способ и устройство для выращивания птицы / Дубровин А.В., Мусин А.М и др. // Опубл. 12.10.2008, бюл. №14). В помещении для выращивания птицы размещаются конструкции с силоизмерительными датчиками в помещении и со счетчиками количеств взвешиваний, например, количеств случайных по времени посадок только одной птицы на данный силоизмерительный датчик. На выходе второго сумматора накапливается случайный сигнал величины суммарной живой массы попавших на элементы (устройств взвешивания) животных или птиц. На выходе счетчика формируется сигнал количества взвешиваний животных или птиц. На выходе второго элемента деления получается оценка средней за сутки выращивания живой массы одного животного или птицы (бройлера). На первом выходе датчика временной продуктивности одной птицы в момент окончания текущих суток (выращивания) формируется сигнал измеренной продуктивности одной птицы.
Недостатком данного технического решения является невысокая точность измерения живой массы птицы.
Причиной этого является важная общая и без того сложная задача изобретения и отсутствие сведений об учете статистических характеристик процесса по существу выборочного взвешивания случайно попавших на весоизмерительные элементы устройства отдельных птиц и о математически достоверной оценке этой информации при суждении о живой массе всего выращиваемого в птичнике поголовья.
Другим недостатком данного технического решения является отсутствие сведений о собственно конструкции весоизмерителя, установленного в производственном сельскохозяйственном помещении для выращивания животных или птицы. Например, является совершенно очевидным, что увеличение количества взвешиваний, причем не одних и тех же особей из выращиваемого поголовья, а разных животных или птиц из выращиваемой партии поголовья, значительно улучшает точность оценки живой массы всего выращиваемого поголовья. Поэтому конструкция весоизмерителя должна быть по возможности более привлекательной для всех животных или птицы для того, чтобы они чаще появлялись на весоизмерительной платформе.
Причиной этого является принятое по умолчанию в указанном аналоге допущение о вполне достаточной точности работы перечисленных в аналоге технических средств. Однако для высокоточных технологий АПК (аграрно-промышленного комплекса) следует иметь новые технические решения с наибольшей точностью измерения, в том числе и измерения живой массы выращиваемого поголовья для последующего высокоточного управления кормлением, микроклиматом, обогревом молодняка и многими другими взаимосвязанными технологическими процессами.
В производственных помещениях сельскохозяйственного назначения, например в промышленных птичниках, одновременно выращиваются или содержатся до нескольких десятков тысяч птиц, поэтому даже незначительная погрешность в определении реального значения живой массы всего поголовья в птичнике по результатам взвешивания случайных выборочных особей приводит к ошибкам управления многими технологиями и технологическими процессами. При этом дополнительные затраты, которые связаны только с погрешностями оценки суммарной живой массы поголовья в производственном помещении по результатам выборочного взвешивания случайных единичных животных или птиц из генеральной совокупности их в производственном помещении, достигают больших значений и по стоимости становятся сопоставимыми с другими составляющими издержек производства. Взвесить же всю генеральную совокупность животных или птиц практически невозможно. Взвешивание всего поголовья приводит либо к чрезмерным трудовым и другим эксплуатационным (а также к дополнительным капитальным) затратам, либо будет травмировать поголовье (стресс, прямые потери продуктивности поголовья, потери части самого поголовья и не допустимые технологией выращивания механические повреждения особей). Поэтому о сколько-нибудь существенной целесообразности такого, кажущегося на первый взгляд теоретически идеальным, подхода к повышению точности технологии взвешивания не приходится даже и говорить. Изначально умещающаяся на весах только одна особь животного или птицы при взвешивании позволяет устранить неоднозначность результата взвешивания в случае попадания на весоизмерительную платформу весов одновременно двух или более особей. Поэтому конструкция весоизмерительной платформы весов должна изначально допускать попадание на нее только одной, единственной, в контексте данного изобретения, единичной особи из всех животных или птиц стада.
Задачей изобретения является автоматизированная с заданной достоверностью и с заданной точностью оценка средней по стаду живой массы животного или птицы при случайном выборочном взвешивании произвольной особи стада для последующего точного управления технологиями и технологическими процессами животноводства и птицеводства.
В результате использования изобретения устанавливается с заданной достоверностью значение сигнала оценки живой массы животного или птицы по всему стаду поголовья в производственном помещении или в пространстве его обитания, обеспечивается практическая возможность с заданной точностью в автоматизированном режиме получить сигнал оценки средней по стаду живой массы животного или птицы при случайном выборочном взвешивании особей стада в ходе технологии выращивания стада животных или птицы для последующего точного управления технологиями и технологическими процессами животноводства или птицеводства.
Вышеуказанный технический результат достигается способом автоматизированной оценки средней по стаду живой массы животного или птицы при случайном выборочном взвешивании произвольной особи стада животных или птицы, включающим случайное выборочное взвешивание произвольной особи стада животных или птицы и задание сигнала технологически минимального количества обязательных взвешиваний, причем задают сигнал наибольшей допустимой погрешности измерения средней живой массы особи по стаду животных или птицы, задают сигнал доверительной вероятности попадания сигнала оценки средней по стаду живой массы животного или птицы в доверительный интервал сигналов случайного выборочного взвешивания произвольной особи стада, в зависимости от этого сигнала доверительной вероятности путем вычисления или путем извлечения из памяти соответствующих технических средств запомненных данных в соответствии с таблицей функции Лапласа формируют сигнал аргумента функции Лапласа, определяют сигнал факта события размещения особи на грузоприемной платформе весов и формируют сигнал события взвешивания, измеряют количество событий взвешиваний единичных особей стада и формируют сигнал количества взвешиваний произвольных особей стада, измеряют живую массу произвольной особи стада, формируют сигнал измеренной живой массы произвольной особи стада и запоминают полученные сигналы измеренной живой массы произвольных особей стада, суммируют сигналы измерений живой массы произвольных особей стада и полученный суммарный сигнал делят на сигнал количества взвешиваний произвольных особей стада, формируя при этом сигнал оценки средней живой массы особи по стаду животных или птицы, который также является сигналом оценки математического ожидания живой массы особи по стаду животных или птицы, формируют сигнал оценки среднего квадратического отклонения живой массы особи по стаду, причем величина этого сигнала пропорциональна квадратному корню из суммы квадратов разностей запомненных сигналов измеренной живой массы произвольных особей стада и сигнала оценки математического ожидания живой массы особи по стаду животных или птицы, деленной на разность сигнала количества взвешиваний произвольных особей стада и сигнала единицы количества взвешиваний произвольной особи стада, затем формируют сигнал оценки коэффициента вариации живой массы особей по стаду, пропорциональный умноженному на значение в сто процентов отношению сигнала оценки среднего квадратического отклонения живой массы особи по стаду к сигналу оценки математического ожидания живой массы особи по стаду, формируют сигнал оценки погрешности измерения средней живой массы особи по стаду, пропорциональный произведению сигнала оценки коэффициента вариации живой массы особей по стаду и сигнала аргумента функции Лапласа, деленному на корень квадратный из сигнала количества взвешиваний произвольных особей стада, сравнивают сформированный сигнал оценки погрешности измерения средней живой массы особи по стаду с заданным сигналом наибольшей допустимой погрешности измерения средней живой массы особи по стаду животных или птицы и в зависимости от результата сравнения либо продолжают статистическую обработку сигналов процесса взвешивания произвольных особей при превышении значением первого указанного сигнала значения второго указанного сигнала, либо прекращают статистическую обработку сигналов процесса взвешивания произвольных особей при равенстве значений этих указанных сигналов, и при превышении значением второго указанного сигнала значения первого указанного сигнала и при дополнительном условии равенства и превышения значением сигнала количества случайных взвешиваний значения заданного сигнала технологически минимального количества обязательных взвешиваний используют полученные сигналы количества взвешиваний произвольных особей стада, достоверной оценки средней живой массы особи по стаду животных или птицы, оценки среднего квадратического отклонения живой массы особи по стаду, оценки коэффициента вариации живой массы особей по стаду, сигнал оценки погрешности измерения средней живой массы особи по стаду для достоверного информирования персонала сельскохозяйственного помещения, цеха или предприятия при осуществлении управленческих операторских действий с техническими средствами обеспечения технологии выращивания поголовья, а также для подачи их на соответствующие измерительные, управляющие и задающие входы автоматизированного технологического оборудования управления технологией выращивания поголовья.
Технический результат достигается тем, что устройство автоматизированной оценки средней по стаду живой массы животного или птицы при случайном выборочном взвешивании произвольной особи стада животных или птицы содержит весы с грузоприемной платформой и электронным выходом (сокращенно: электронные весы), первый задатчик технологически минимального количества обязательных взвешиваний (первый задатчик), при этом в устройство введены второй задатчик сигнала наибольшей допустимой погрешности измерения средней живой массы особи по стаду животных или птицы (второй задатчик), третий задатчик сигнала доверительной вероятности попадания сигнала оценки средней по стаду живой массы животного или птицы в доверительный интервал сигналов случайного выборочного взвешивания произвольной особи произвольной особи стада (третий задатчик), первый формирователь сигнала аргумента функции Лапласа (первый формирователь), второй формирователь сигнала события взвешивания, третий формирователь сигнала количества взвешиваний произвольной особи стада, измеритель сигнала живой массы единичных особей стада, четвертый формирователь сигнала измеренной живой массы произвольной особи стада (четвертый формирователь), первый блок памяти полученных сигналов измеренной живой массы произвольной особи стада, сумматор сигналов измерений живой массы произвольной особи стада, делитель полученного суммарного сигнала на сигнал количества взвешиваний произвольной особи стада, пятый формирователь сигнала оценки средней живой массы особи по стаду животных или птицы (или формирователь сигнала оценки математического ожидания живой массы особи по стаду животных или птицы) (пятый формирователь), шестой формирователь сигнала оценки среднего квадратического отклонения живой массы особи по стаду (шестой формирователь), второй блок вычисления и формирования сигналов разностей запомненных сигналов измеренной живой массы произвольных особей стада и сигнала оценки математического ожидания живой массы особи по стаду животных или птицы и запоминания вычисленных и сформированных сигналов, третий блок возведения в квадратную (вторую) степень и запоминания полученных сигналов квадратов разностей сигналов, четвертый блок суммирования полученных сигналов квадратов разностей сигналов, четвертый задатчик сигнала соответствия единице количества взвешиваний (четвертый задатчик), пятый блок разности сигнала количества взвешиваний произвольных особей стада и сигнала единицы количества взвешиваний произвольной особи стада, первый делитель суммы полученных сигналов квадратов разностей сигналов на сигнал разности сигнала количества взвешиваний произвольных особей стада и сигнала единицы количества взвешиваний произвольной особи стада, шестой блок извлечения квадратного корня из сигнала полученного результата деления сигнала суммы квадратов разностей запомненных сигналов измеренной живой массы произвольной особи стада и сигнала оценки математического ожидания живой массы особи по стаду животных или птицы, деленной на разность сигнала количества взвешиваний произвольных особей стада и сигнала единицы количества взвешиваний произвольной особи стада, седьмой формирователь сигнала оценки коэффициента вариации живой массы особей по стаду (седьмой формирователь), второй делитель сигнала оценки среднего квадратического отклонения живой массы особи по стаду на сигнал оценки математического ожидания живой массы особи по стаду, первый элемент умножения сигнала результата деления на значение в сто процентов, пятый задатчик сигнала значения в сто процентов (пятый задатчик), восьмой формирователь сигнала оценки погрешности измерения средней живой массы особи по стаду (восьмой формирователь), шестой задатчик сигнала аргумента функции Лапласа (шестой задатчик), второй элемент умножения сигнала оценки коэффициента вариации живой массы особей по стаду на сигнал аргумента функции Лапласа, элемент извлечения квадратного корня из сигнала количества взвешиваний произвольных особей стада, третий делитель сигнала полученного произведения сигнала оценки коэффициента вариации живой массы особей по стаду на сигнал аргумента функции Лапласа на корень квадратный из сигнала количества взвешиваний единичных особей стада, первая схема сравнения сформированного сигнала оценки погрешности измерения средней живой массы особи по стаду с заданным сигналом наибольшей допустимой погрешности измерения средней живой массы особи по стаду животных или птицы, вторая схема сравнения сигнала количества случайных взвешиваний с заданным сигналом технологически минимального количества обязательных взвешиваний, управляемый ключ для разрешения дальнейшего прохождения в устройстве сигналов достоверных оценок, блок индикации для обслуживающего персонала текущих во времени работы устройства сигналов заключительных достоверных оценок требуемых технологических параметров взвешивания, измерительные, управляющие и задающие входы автоматизированного технологического оборудования управления технологией выращивания поголовья с соответствующими ей технологическими процессами, блок управления работой устройства, при этом электронные весы представляют собой последовательное соединение измерителя сигнала живой массы единичных особей стада и четвертого формирователя сигнала измеренной живой массы произвольной особи стада, выход которого через первый блок памяти полученных сигналов измеренной живой массы произвольной особи стада подключен к соединению, которое является первым входом шестого формирователя сигнала оценки среднего квадратического отклонения живой массы особи по стаду, входа сумматора сигналов измерений живой массы произвольной особи стада и первого входа второго блока вычисления и формирования сигналов разностей запомненных сигналов измеренной живой массы произвольных особей стада и сигнала оценки математического ожидания живой массы особи по стаду животных или птицы и запоминания вычисленных и сформированных сигналов, второй вход которого является вторым входом, первым и вторым выходами шестого формирователя сигнала оценки среднего квадратического отклонения живой массы особи по стаду и подключен к соединению выхода пятого формирователя сигнала оценки средней живой массы особи по стаду животных или птицы, первого входа второго делителя сигнала оценки среднего квадратического отклонения живой массы особи по стаду на сигнал оценки математического ожидания живой массы особи по стаду, который является первым входом седьмого формирователя сигнала оценки коэффициента вариации живой массы особей по стаду, и первого входа управляемого ключа для разрешения дальнейшего прохождения в устройстве сигналов достоверных оценок, а выход второго блока вычисления и формирования сигналов разностей запомненных сигналов измеренной живой массы произвольных особей стада и сигнала оценки математического ожидания живой массы особи по стаду животных или птицы и запоминания вычисленных и сформированных сигналов через последовательное соединение третьего блока возведения во вторую степень и запоминания полученных сигналов квадратов разностей сигналов, четвертого блока суммирования полученных сигналов квадратов разностей сигналов, через первый вход и выход первого делителя суммы полученных сигналов квадратов разностей сигналов на сигнал разности сигнала количества взвешиваний произвольных особей стада и сигнала единицы количества взвешиваний произвольной особи стада, через шестой блок извлечения квадратного корня из сигнала полученного результата деления сигнала суммы квадратов разностей запомненных сигналов измеренной живой массы произвольной особи стада и сигнала оценки математического ожидания живой массы особи по стаду животных или птицы, деленной на разность сигнала количества взвешиваний произвольных особей стада и сигнала единицы количества взвешиваний произвольной особи стада, подключен к соединению, которое является вторым входом седьмого формирователя сигнала оценки коэффициента вариации живой массы особей по стаду, вторых входов второго делителя сигнала оценки среднего квадратического отклонения живой массы особи по стаду на сигнал оценки математического ожидания живой массы особи по стаду и управляемого ключа для разрешения дальнейшего прохождения в устройстве сигналов достоверных оценок, выход которого подключен к соединению входов блока индикации для обслуживающего персонала текущих во времени работы устройства сигналов заключительных достоверных оценок требуемых технологических параметров взвешивания и соответствующих измерительных, управляющих и задающих входов автоматизированного технологического оборудования управления технологией выращивания поголовья и соответствующими ей технологическими процессами, выход сумматора сигналов измерений живой массы произвольной особи стада соединен со вторым входом делителя полученного суммарного сигнала на сигнал количества взвешиваний произвольной особи стада, первый вход которого является третьим входом шестого формирователя сигнала оценки среднего квадратического отклонения живой массы особи по стаду и подключен к соединению выхода третьего формирователя сигнала количества взвешиваний произвольной особи стада с подключенным к его входу второго формирователя сигнала события взвешивания, первого входа пятого блока разности сигнала количества взвешиваний произвольных особей стада и сигнала единицы количества взвешиваний произвольной особи стада, входа элемента извлечения квадратного корня из сигнала количества взвешиваний произвольных особей стада, являющегося первым входом восьмого формирователя сигнала оценки погрешности измерения средней живой массы особи по стаду, второго входа второй схемы сравнения сигнала количества случайных взвешиваний с заданным сигналом технологически минимального количества обязательных взвешиваний, первый вход и выход которого соединены соответственно с выходом первого задатчика технологически минимального количества обязательных взвешиваний и со вторым управляющим входом управляемого ключа для разрешения дальнейшего прохождения в устройстве сигналов достоверных оценок, первый управляющий вход которого подключен к выходу первой схемы сравнения сформированного сигнала оценки погрешности измерения средней живой массы особи по стаду с заданным сигналом наибольшей допустимой погрешности измерения средней живой массы особи по стаду животных или птицы, первый вход которого соединен с выходом второго задатчика сигнала наибольшей допустимой погрешности измерения средней живой массы особи по стаду животных или птицы, а второй его вход является выходом восьмого формирователя сигнала оценки погрешности измерения средней живой массы особи по стаду и соединением четвертого входа управляемого ключа для разрешения дальнейшего прохождения в устройстве сигналов достоверных оценок и выхода третьего делителя сигнала полученного произведения сигнала оценки коэффициента вариации живой массы особей по стаду на сигнал аргумента функции Лапласа на корень квадратный из сигнала количества взвешиваний единичных особей стада, первый и второй входы которого подключены соответственно к выходу элемента извлечения квадратного корня из сигнала количества взвешиваний произвольных особей стада и к выходу второго элемента умножения сигнала оценки коэффициента вариации живой массы особей по стаду на сигнал аргумента функции Лапласа, первый вход которого является вторым входом восьмого формирователя сигнала оценки погрешности измерения средней живой массы особи по стаду и также выходом седьмого формирователя сигнала оценки коэффициента вариации живой массы особей по стаду и соединен с выходом первого элемента умножения сигнала результата деления на значение в сто процентов и третьим входом управляемого ключа для разрешения дальнейшего прохождения в устройстве сигналов достоверных оценок, ко второму входу второго элемента умножения сигнала оценки коэффициента вариации живой массы особей по стаду на сигнал аргумента функции Лапласа подключен выход последовательного соединения третьего задатчика сигнала доверительной вероятности попадания сигнала оценки средней по стаду живой массы животного или птицы в доверительный интервал сигналов случайного выборочного взвешивания произвольной особи произвольной особи стада, первого формирователя сигнала аргумента функции Лапласа, шестого задатчика сигнала аргумента функции Лапласа, вход которого является третьим входом восьмого формирователя сигнала оценки погрешности измерения средней живой массы особи по стаду, первый и второй входы первого элемента умножения сигнала результата деления на значение в сто процентов подключены соответственно к выходу пятого задатчика сигнала значения в сто процентов и к выходу второго делителя сигнала оценки среднего квадратического отклонения живой массы особи по стаду на сигнал оценки математического ожидания живой массы особи по стаду, второй вход и выход пятого блока разности сигнала количества взвешиваний произвольных особей стада и сигнала единицы количества взвешиваний произвольной особи стада подключены соответственно к выходу четвертого задатчика сигнала соответствия единице количества взвешиваний и ко второму входу первого делителя суммы полученных сигналов квадратов разностей сигналов на сигнал разности сигнала количества взвешиваний произвольных особей стада и сигнала единицы количества взвешиваний произвольной особи стада, а блок управления работой устройства является управляющим блоком устройства.
Технический результат достигается также тем, что дополнительное устройство по способу содержит двое или более электронных весов, установленных в производственном помещении или в зоне обитания поголовья, и соответствующее количество вторых формирователей и третьих формирователей, измерителей сигнала живой массы единичных особей стада, четвертых формирователей, причем блок управления работой устройства, обеспечивающий в устройстве по способу разнообразные действия: суммирование сигналов количеств случайных взвешиваний произвольных особей поголовья в разных зонах, накопление, запоминание и суммирование случайных сигналов взвешенной живой массы произвольных особей стада по всем контролируемым электронными весами локальным зонам обитания, в дополнительном устройстве исключает наложение друг на друга одновременно пришедших в устройство сигналов количеств взвешиваний и сигналов живой массы от различных электронных весов из различных зон обитания, производит их соответствующее разделение по времени и вырабатывает соответствующие им временные задержки по отношению друг к другу, а выходы третьих формирователей подключены к соответствующим входам введенного в дополнительное устройство блока формирования суммарного сигнала количества взвешиваний произвольных особей стада на нескольких электронных весах в различных локальных областях территории производственного помещения или в локальных зонах обитания поголовья, выходы электронных весов или выходы формирователей сигналов измеренной живой массы произвольных особей стада в различных локальных зонах территории производственного помещения или в локальных зонах обитания поголовья (четвертых формирователей) подключены к соответствующим входам введенного в дополнительное устройство блока формирования суммарного сигнала измеренной живой массы произвольных особей стада на нескольких электронных весах в различных локальных зонах территории производственного помещения или в локальных зонах обитания поголовья.
Технический результат достигается также тем, что электронные весы устройства по способу и дополнительного устройства по способу установлены на бетонном или другом полу животноводческого или птицеводческого помещения, например птичника, и возвышаются над древесно-стружечной подстилкой или другой подстилкой, вблизи от ниппельной поилки в производственном помещении для выращивания животных или птицы, например бройлеров, причем рядом размещенные другие соседние поилки, с целью дополнительного привлечения поголовья к электронным весам, на время проведения процесса выборочных взвешиваний отключены от подачи в них жидкости для питья поголовья, содержит опорную часть конструкции электронных весов, грузоприемную платформу электронных весов, дополнительные наклонные поверхности между полом или подстилкой и весоизмерительной поверхностью грузоприемной платформы электронных весов в виде боковой поверхности усеченного конуса при круговой форме горизонтальной грузоприемной платформы весов, либо в виде боковых поверхностей усеченной многоугольной пирамиды при соответствующей многоугольной форме горизонтальной грузоприемной платформы весов с целью облегчения захода на нее тяжелых особей, например, бройлеров, в конечной стадии их выращивания, ниппельную поилку, участок установленного в птичнике водопровода для поения бройлеров, элемент крепления к водопроводной трубе светозащитной арматуры, установленный вблизи электронных весов световой прибор для дополнительного привлечения особей поголовья на грузоприемную платформу весов за счет мигающего света от источника освещения для возбуждения дополнительного интереса у особи приблизиться к нему, при этом взойти на весоизмерительную грузоприемную платформу и таким образом дополнительно увеличить количество взвешиваний особей для ускорения процесса измерения живой массы и повышения точности измерений выборочной оценки средней живой массы особи по стаду поголовья.
Сущность предлагаемого изобретения поясняется примером. Таблица значений функции Лапласа - это вероятность того, что случайная величина примет значение, принадлежащее заданному интервалу. При решении задач по теории вероятностей, как правило, требуется найти значение функции Лапласа по известному значению аргумента или, наоборот, по известному значению функции Лапласа требуется найти значение аргумента. Для этого пользуются таблицей значений функции Лапласа. Таблица значений функции Лапласа незаменима при изучении теории вероятностей, так как решать интеграл (функцию Лапласа) сложно, а запомнить таблицу значений функции Лапласа просто невозможно. Функция Лапласа при разных значениях t: F(-t)=-F(t). Это функция нормального распределения (см.: сайт:webmath.ru).
Под «достоверностью», уровнем достоверности понимают показатель вероятности того, что истинное значение изучаемого параметра генеральной совокупности попадет в доверительный интервал. Чем выше задаваемый уровень достоверности, тем больше должна быть выборка. Под доверительным интервалом понимают диапазон, в который попадет истинное значение изучаемого параметра генеральной совокупности при данном уровне достоверности. Чем он меньше, тем больше должна быть выборка. Именно доверительный интервал именуют «допустимой погрешностью» выборки. Ее исследователи задают (назначают) сами или рассчитывают по специальным формулам в зависимости от заданного объема выборки. Измеряется «допустимая погрешность» в процентных пунктах - п.п. Часто их путают с процентами, - %. Это серьезная ошибка (см.: сайт: cityexclusive.ru>books/igor-berezin/dostovernost-…).
Величина статистических погрешностей определяется так. Допустим, надо оценить некий параметр p (живую массу). С этой целью проводится статистическое измерение (живой массы) на выборке n. Отметим, что число p есть абсолютно точное значение искомого параметра, которое не известно и не может быть известно в принципе, но которое надо оценить методом статистических измерений. Доверительная вероятность и соответствующий ей доверительный интервал определяются так. Проводя статистическое измерение, можно получить оценку p* нашего искомого параметра p. Наша оценка p* будет находиться где-то вблизи истинного значения параметра p и, скорее всего, не будет точно равна p. Распределение возможных значений оценок значения искомого параметра f(p*) подчиняется, в общем случае, нормальному (Гаусса) закону. Величина σ - это так называемое среднее квадратическое отклонение (СКО), величина, зависимая от объема выборки n: чем больше выборка, тем меньше это отклонение. Площадь, ограниченная гауссовой кривой и горизонтальной осью, равна единице. Рассмотрим процент A% площади под кривой Гаусса вблизи p в границах от p-x до p+x. С вероятностью A% полученная оценка p* будет находиться в границах от p-x до p+x. Вероятность A% называют доверительной вероятностью. Говорят: с вероятностью A% оценка p* будет находиться в интервале между нижней границей p-x и верхней границей p+x вблизи p. Или сокращенно - «p%x». Принята стандартная величина доверительной вероятности A=95%, в этом случае наш интервал будет иметь границы %2σ вблизи p. Или - p%2σ (advlab.ru>articles/article72.htm).
Выборочные характеристики, определяемые на основе ограниченного числа наблюдений, могут приближаться к истинным значениям характеристик генеральной совокупности лишь с определенной точностью. Точность выборочного наблюдения (эксперимента) может задаваться в единицах измерения исследуемой величины, в единицах выборочного значения и в процентах исследуемой величины или характеристики. Интервал, в который в общем случае может быть произвольным, называется доверительными границами, а соответствующая вероятность - доверительной вероятностью или, как часто говорят, надежностью.
Вероятность ошибки характеризует долю риска в оценке истинного значения оцениваемой величины и часто называется уровнем значимости. Для удобства величину доверительного интервала устанавливают в долях среднеквадратического отклонения. Тогда доверительную вероятность определяют как площадь, ограниченную кривой нормального распределения на интервале. Определяют доверительный интервал в такой последовательности: вычисляют параметр выборки, выбирают доверительную вероятность; определяют соответствующее выбранному значению число из таблицы табулированных значений стандартного нормального распределения; вычисляют доверительный интервал. С увеличением количества замеров достоверность эксперимента возрастает, а доверительный интервал уменьшается. Таблица используется в том случае, когда о дисперсии исследуемой величины нельзя составить определенного мнения. Если же на основании априорных сведений или предварительных опытов значение дисперсии известно, то по формуле случайной выборочной ошибки, равной половине длины доверительного интервала, определяют необходимое число замеров, гарантирующее требуемую надежность результата выборочной оценки.
При обработке числовых массивов результатов эксперимента как случайных величин на практике применяют следующие выборочные оценки:
- математическое ожидание

- дисперсия

- коэффициент асимметрии

- коэффициент эксцесса
где xi - значение результата в i-м опыте; N - число результатов в массиве;
- среднее квадратическое отклонение

Производная оценка от величины математического ожидания Mx и дисперсии Dx или среднего квадратического отклонения σx является коэффициентом вариации V, определяемым в процентах по формуле:

Дисперсия Dx, среднее квадратическое отклонение σx и коэффициент вариации V являются количественными характеристиками оценки рассеивания значений результатов эксперимента как случайной величины и применяются при изучении различных действий со случайным исходом. Коэффициент асимметрии и коэффициент эксцесса являются характеристиками более высокого порядка. Первый характеризует «скошенность распределения», а второй - степень его «островершинности». Вычисленные по экспериментально наблюдаемым случайным величинам и случайным функциям статистические характеристики несут информацию не обо всей генеральной совокупности, которая в общем случае бесконечна, а лишь о некоторой ее части - выборке, элементы которой измерены с определенными ошибками. В связи с этим в результате эксперимента получают лишь некоторые оценки параметров генеральной совокупности. Следовательно, и любая выборочная оценка - это случайная величина, точность определения которой и возможные при этом ошибки необходимо контролировать. Следует также иметь в виду, что вычисленные моменты распределения являются точечными оценками выборочных величин, так как каждый из них оценивает параметры генеральной совокупности с помощью единственного числа. Они позволяют судить о значении вычисленной статистической характеристики в данной точке и ничего не говорят о возможных пределах варьирования самой оценки.
К вычисляемым в результате эксперимента оценкам случайных величин предъявляются три основных требования: состоятельности, несмещенности и эффективности. Полагают, что оценка состоятельна, если с ростом объема выборки она стремится по вероятности к истинному значению, не смещена, если ее математическое ожидание стремится к истинному значению, и эффективна, когда оценка обладает наименьшим рассеянием по сравнению с любыми другими оценками. Из двух оценок эффективнее та, которая обладает меньшей дисперсией, т.е. значения которой рассеиваются в более узком интервале.
На уровень рассеивания оценок значительное влияние оказывают ошибки, имеющие место при эксперименте.
Как известно, при выборочном наблюдении встречаются ошибки трех видов: грубые, систематические и случайные. Грубые ошибки, отличающиеся большим отклонением от центра группирования выборки, отсеиваются на этапе первичного анализа материалов.
Точность измерений любой физической величины характеризуется, как известно, абсолютной 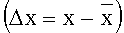


Систематические ошибки δ постоянны при определении каждого члена выборки и зависят от технического уровня измерительной аппаратуры и техники эксперимента. Эти ошибки можно свести к минимуму периодической тарировкой приборов с помощью более совершенных и повышением точности метода определения исследуемых переменных.
Случайные ошибки обусловлены влиянием большого количества факторов. Их появление неодинаково и случайно от измерения к измерению и не может быть предварительно учтено из-за их зависимости от изменения условий измерений и изменчивости самих измеряемых величин. Однако при достаточно большом количестве экспериментов суммарное значение случайных ошибок, изменяющихся примерно одинаково в положительную и отрицательную сторону, приближается к нулю. Случайные ошибки в подавляющем большинстве подчиняются нормальному закону распределения с математическим ожиданием, равным «0». В практике исследований сельскохозяйственных машин систематические и случайные ошибки близки друг к другу и совместно определяют ошибку измерений. При оценке точности измерений рекомендуется учитывать суммарную ошибку

где σζ - среднее квадратическое отклонение случайной величины ζ при числе измерений n.
Для величин, определяемых косвенно методом расчета по другим измеренным случайным величинам, оценка погрешностей осуществляется вычислением статистических оценок по соответствующим функциональным зависимостям.
Выборочные характеристики Mx, σK и др., определяемые на основе ограниченного числа наблюдений, могут приближаться к истинным значениям характеристик генеральной совокупности 


Точность выборочного наблюдения (эксперимента) может задаваться в единицах измерения исследуемой величины, в единицах выборочного значения σx и в процентах исследуемой величины или характеристики. Систематическая ошибка, будучи постоянной, при этом может не учитываться. Вероятность того, что истинное значение характеристик генеральной совокупности находится в отмеченных пределах, равна

и называется надежностью данной оценки. Так как математическое ожидание любой выборки само является случайной величиной, то полезно установить такой интервал, в котором с заданной степенью достоверности будет заключено значение оцениваемого параметра. Интервал Mx+ε, который в общем случае может быть произвольным [a i, bi], называется доверительными границами, a соответствующая вероятность - доверительной вероятностью или, как часто говорят, надежностью. Доверительную вероятность для удобства обозначают как

Соответственно, α есть вероятность ошибки, которая на кривой распределения изображается в виде двух половинок α/2. Вероятность ошибки характеризует долю риска в оценке истинного значения оцениваемой величины и часто называется уровнем значимости. Для удобства величину доверительного интервала устанавливают в долях среднеквадратического отклонения ±zστ. Здесь величина z есть по существу критерий Стьюдента t или аргумент функции Лапласа. Тогда доверительную вероятность определяют как площадь, ограниченную кривой нормального распределения на интервале ±zστ. Используя формулу стандартного нормального распределения

доверительную вероятность записывают в таком виде:

где
Доверительный интервал для дисперсии

Определяют доверительный интервал в такой последовательности: вычисляют параметр выборки 
С увеличением количества замеров достоверность эксперимента возрастает, а доверительный интервал уменьшается. Таблица используется в том случае, когда о дисперсии исследуемой величины нельзя составить определенного мнения. Если же на основании априорных сведений или предварительных опытов σx известно, то по формуле случайной выборочной ошибки, равной половине длины доверительного интервала

определяют необходимое число замеров, гарантирующее требуемую надежность

Точность и надежность оценки выборочных характеристик не следует смешивать с точностью исследования, которую часто вычисляют по такой формуле:

где ν - коэффициент вариации выборочного наблюдения, % (в случае оценки точности для сельскохозяйственных машин и процессов считается достаточным, если ν=3…5%), δ - систематическая ошибка.
Вычисленные по экспериментально наблюдаемым случайным величинам и случайным функциям статистические характеристики несут информацию не обо всей генеральной совокупности, которая в общем случае бесконечна, а лишь о некоторой ее части - выборке, элементы которой измерены с определенными ошибками. В связи с этим в результате эксперимента получают лишь некоторые оценки параметров генеральной совокупности. Следовательно, и любая выборочная оценка - это случайная величина, точность определения которой и возможные при этом ошибки необходимо контролировать. Следует также иметь в виду, что вычисленные моменты распределения являются точечными оценками выборочных величин, так как каждый из них оценивает параметры генеральной совокупности с помощью единственного числа. Они позволяют судить о значении вычисленной статистической характеристики в данной точке и ничего не говорят о возможных пределах варьирования самой оценки (см.: 4. ОРГАНИЗАЦИЯ И ПРОВЕДЕНИЕ ДИССЕРТАЦИОННОГО ИССЛЕДОВАНИЯ. 4.5. Корректность математической обработки результатов эксперимента - залог достоверности научных положений по диссертации. Сайт: aspirinby.org).
При планировании выборочного наблюдения с заранее заданным значением допустимой ошибки выборки необходимо правильно оценить требуемый объем выборки. Этот объем может быть определен на основе допустимой ошибки при выборочном наблюдении, исходя из заданной вероятности P, гарантирующей допустимую величину уровня ошибки (с учетом способа организации наблюдения). Формулы для определения необходимой численности выборки n легко получить непосредственно из формул предельной ошибки выборки. Так, из выражения для предельной ошибки (абсолютной, т.е. в единицах измерения случайной величины, в данном случае в кг):

непосредственно определяется объем выборки n:

Эта формула показывает, что с уменьшением предельной ошибки выборки Δ существенно увеличивается требуемый объем выборки n, который пропорционален дисперсии σ2 и квадрату критерия Стьюдента t (см.: сайт: grandars.ru>Статистика>Выборочный метод).
Поэтому относительная предельная ошибка или допустимая погрешность измерения средней живой массы особи по стаду получается путем деления абсолютной предельной ошибки на оценку математического ожидания и измеряется в относительных единицах. Используя величину коэффициента вариации, равного отношению σ к математическому ожиданию Mx (см. формулу (6)), получаем окончательную формулу определения относительной погрешности измерения средней живой массы особи по стаду:

где Δ% - относительная погрешность измерения средней живой массы особи по стаду, %; σ - оценка среднего квадратического отклонения живой массы особи по стаду от оценки математического ожидания живой массы особи по стаду 
Зависимость (19) используется при преобразовании соответствующих сигналов в способе и устройстве для получения достоверного сигнала оценки погрешность измерения средней живой массы особи по стаду.
Таким образом, технолог животноводства или птицеводства задает допустимую относительную погрешность измерения средней живой массы особи по стаду поголовья данного вида и возраста. Другими словами, задается требуемая точность определения этой величины, от значения которой прямо зависит точность управления технологией выращивания с сопровождающими эту технологию многочисленными технологическими процессами. Этой погрешности соответствует заданный объем выборки, то есть наименьшее допустимое количество взвешиваний особей. Как только количество случайных по времени взвешиваний случайных единичных особей станет равным и большим заданного технологом или вычисленного значения, появляется вполне и более чем вполне достоверная информация о средней живой массе особи по стаду животных или птицы.
Поэтому только непрерывная в реальном времени высокоточная автоматизированная оценка средней по стаду живой массы животного или птицы при дискретном во времени случайном выборочном взвешивании единичных особей стада в ходе технологии выращивания стада животных или птицы позволяет при управлении выращиванием поголовья найти выгодные компромиссы между затратами корма и приростом живой массы поголовья. А также между затратами энергии на обогрев, на другие технологические процессы и расчетными потерями результирующей продуктивности поголовья в их ценовом выражении. При этом необходима статистическая обработка измеряемых и вычисляемых сигналов о живой массе особи стада.
Сущность предлагаемого изобретения поясняется фиг.1-5.
На фиг.1 приведена общая схема технологии и технологического оборудования при выращивании птицы в условиях общего лучистого обогрева цыплят и птичника в промышленном птицеводстве: 1 - теплозащитные ограждающие конструкции помещения птичника; 2 - утепленный пол птичника; 3 - приточная вентиляция; 4 - вытяжная вентиляция; 5 - поголовье птицы; 6 - обогреватели; 7 - энергетическая магистраль; 8 - регулятор температуры; 9, 10 и 11 - весоизмерители для определения живой массы животного или птицы в зоне обитания в производственном помещении.
На фиг.2 приведена общая схема устройства для осуществления способа, т.е. функциональная схема устройства автоматизированной оценки средней по стаду живой массы животного или птицы при случайном выборочном взвешивании произвольной особи стада животных или птицы: 12 - весы с грузоприемной платформой и электронным выходом (электронные весы); 13 - первый задатчик технологически минимального количества обязательных взвешиваний (первый задатчик); 14 - второй задатчик сигнала наибольшей допустимой погрешности измерения средней живой массы особи по стаду животных или птицы (второй задатчик); 15 - третий задатчик сигнала доверительной вероятности попадания сигнала оценки средней по стаду живой массы животного или птицы в доверительный интервал сигналов случайного выборочного взвешивания произвольной особи произвольной особи стада (третий задатчик); 16 - первый формирователь сигнала аргумента функции Лапласа (первый формирователь); 17 - второй формирователь сигнала события взвешивания (могут быть использованы: схема сравнения с задатчиком порогового сигнала, триггер с дифференцирующей цепочкой на его входе и т.п.) (второй формирователь); 18 - третий формирователь сигнала количества взвешиваний произвольной особи стада (могут быть использованы: генератор пилообразного напряжения, фантастрон, линейка триггеров, счетчик импульсов и т.п.) (третий формирователь); 19 - измеритель сигнала живой массы единичных особей стада, 20 - четвертый формирователь сигнала измеренной живой массы произвольной особи стада (в аналоговой либо в цифровой форме) (четвертый формирователь); 21 - первый блок памяти полученных сигналов измеренной живой массы произвольной особи стада; 22 - сумматор сигналов измерений живой массы произвольной особи стада; 23 - делитель полученного суммарного сигнала на сигнал количества взвешиваний произвольной особи стада, 24 - пятый формирователь сигнала оценки средней живой массы особи по стаду животных или птицы (или формирователь сигнала оценки математического ожидания живой массы особи по стаду животных или птицы) (пятый формирователь); 25 - шестой формирователь сигнала оценки среднего квадратического отклонения живой массы особи по стаду (шестой формирователь); 26 - второй блок вычисления и формирования сигналов разностей запомненных сигналов измеренной живой массы произвольных особей стада и сигнала оценки математического ожидания живой массы особи по стаду животных или птицы и запоминания вычисленных и сформированных сигналов; 27 - третий блок возведения в квадратную (вторую) степень и запоминания полученных сигналов квадратов разностей сигналов; 28 - четвертый блок суммирования полученных сигналов квадратов разностей сигналов; 29 - четвертый задатчик сигнала соответствия единице количества взвешиваний (четвертый задатчик); 30 - пятый блок разности сигнала количества взвешиваний произвольных особей стада и сигнала единицы количества взвешиваний произвольной особи стада; 31 - первый делитель суммы полученных сигналов квадратов разностей сигналов на сигнал разности сигнала количества взвешиваний произвольных особей стада и сигнала единицы количества взвешиваний произвольной особи стада; 32 - шестой блок извлечения квадратного корня из сигнала полученного результата деления сигнала суммы квадратов разностей запомненных сигналов измеренной живой массы произвольной особи стада и сигнала оценки математического ожидания живой массы особи по стаду животных или птицы, деленной на разность сигнала количества взвешиваний произвольных особей стада и сигнала единицы количества взвешиваний произвольной особи стада; 33 - седьмой формирователь сигнала оценки коэффициента вариации живой массы особей по стаду (седьмой формирователь); 34 - второй делитель сигнала оценки среднего квадратического отклонения живой массы особи по стаду на сигнал оценки математического ожидания живой массы особи по стаду; 35 - первый элемент умножения сигнала результата деления на значение в сто процентов; 36 - пятый задатчик сигнала значения в сто процентов (пятый задатчик); 37 - восьмой формирователь сигнала оценки погрешности измерения средней живой массы особи по стаду (восьмой формирователь); 38 - шестой задатчик сигнала аргумента функции Лапласа (шестой задатчик); 39 - второй элемент умножения сигнала оценки коэффициента вариации живой массы особей по стаду на сигнал аргумента функции Лапласа; 40 - элемент извлечения квадратного корня из сигнала количества взвешиваний произвольных особей стада; 41 - третий делитель сигнала полученного произведения сигнала оценки коэффициента вариации живой массы особей по стаду на сигнал аргумента функции Лапласа на корень квадратный из сигнала количества взвешиваний единичных особей стада; 42 - первая схема сравнения сформированного сигнала оценки погрешности измерения средней живой массы особи по стаду с заданным сигналом наибольшей допустимой погрешности измерения средней живой массы особи по стаду животных или птицы; 43 - вторая схема сравнения сигнала количества случайных взвешиваний с заданным сигналом технологически минимального количества обязательных взвешиваний; 44 - управляемый ключ для разрешения дальнейшего прохождения в устройстве сигналов достоверных оценок; 45 - блок индикации для обслуживающего персонала текущих во времени работы устройства сигналов заключительных достоверных оценок требуемых технологических параметров взвешивания; 46 - измерительные, управляющие и задающие входы автоматизированного технологического оборудования управления технологией выращивания поголовья с соответствующими ей технологическими процессами; 47 - блок управления работой устройства (от суток к очередным суткам выращивания поголовья, очередностью действий над сигналами и т.д.).
На фиг.3 дана таблица выборочных значений функции Лапласа: F(t) - функция Лапласа, t - аргумент функции Лапласа.
На фиг.4 показана функциональная схема дополнительного устройства по способу при нескольких электронных весах 12, установленных в производственном помещении, в зонах обитания поголовья (показаны трое электронных весов 12-1, 12-2, 12-3 в разных зонах помещения) и соответствующем количестве вторых формирователей 17 и третьих формирователей 18 (показаны три вторых формирователя 17-1, 17-2, 17-3 и три третьих формирователя 18-1, 18-2, 18-3): 19-1, 19-2, 19-3 - три измерителя сигнала живой массы единичных особей стада в трех зонах обитания в помещении; 20-1, 20-2, 20-3 - три четвертых формирователя сигналов измеренной живой массы произвольных особей стада в трех различных локальных областях территории производственного помещения или в локальных зонах обитания поголовья (в аналоговой либо в цифровой форме) (четвертые формирователи); 47 - блок управления работой устройства, обеспечивающий суммирование сигналов количеств случайных взвешиваний произвольных особей поголовья в разных зонах, накопление, запоминание и суммирование случайных сигналов взвешенной живой массы произвольных особей стада по всем контролируемым электронными весами локальным зонам обитания, исключающий наложение друг на друга одновременно пришедших в устройство сигналов количеств взвешиваний и сигналов живой массы, производящий их соответствующее разделение по времени и соответствующие им временные задержки (за неимением дополнительного места в данном описании изобретения по существу и в связи с громоздкостью дополнительного описания достаточно хорошо известных и в целом традиционных действий и технических средств блока управления работой устройства 47 подробное описание его состава и внутренних и внешних связей связи в рамках данного изобретения существенного значения не имеет, поэтому будет неоправданно перегружать описание настоящего изобретения и потому считается излишним и в соответствии с этим утверждением не приводится); 48 - блок формирования суммарного сигнала количества взвешиваний произвольных особей стада на нескольких электронных весах в различных локальных областях территории производственного помещения или в локальных зонах обитания поголовья; 49 - блок формирования суммарного сигнала измеренной живой массы произвольных особей стада на нескольких электронных весах в различных локальных зонах территории производственного помещения или в локальных зонах обитания поголовья.
На фиг.5 приведена общая схема конструкции электронных весов (весов с грузоприемной платформой и электронным выходом) вблизи от ниппельной поилки в производственном помещении для выращивания бройлеров с установленным элементом дополнительного светового привлечения птицы: 50 - бетонный пол птичника; 51 - древесно-стружечная подстилка; 52 - опорная часть конструкции весов; 53 - грузоприемная платформа весов; 54 - наклонные поверхности (боковая поверхность усеченного конуса в случае круговой формы горизонтальной грузоприемной платформы весов, либо боковые поверхности усеченной пирамиды в случае многоугольной формы горизонтальной грузоприемной платформы весов), 55 - ниппельная поилка; 56 - установленный в птичнике водопровод для поения бройлеров; 57 - элемент крепления к водопроводной трубе светозащитной арматуры; 58 - световой прибор для дополнительного привлечения поголовья на грузоприемную платформу весов.
Способ осуществляется следующим образом.
Особь стада поголовья в ходе нормально протекающих технологических процессов технологии выращивания заходит на грузоприемную платформу электронных весов. Формируется сигнал живой массы случайной особи. По этому сигналу в целом уже можно, но с весьма большим приближением (с большой ошибкой), судить о средней живой массе особи по всему стаду поголовья: для точной оценки надо взвесить всех особей стада. Однако, это технологически невозможно из-за чрезмерных потерь поголовья в результате стрессовых ситуаций, связанных с вмешательством персонала или специального дополнительного оборудования в среду обитания животных или птицы. Также велики эксплуатационные (труд, энергия, отчисления на капитальные вложения и т.п.) и капитальные затраты. Поэтому измеряемые, формируемые, сравниваемые и другие сигналы (материальные объекты информационных характеристик процессов) в ходе материальных действий по способу подвергаются математической статистической обработке другими соответствующими сформированными сигналами. Производят дискретное во времени, в момент захода на весоизмерительную платформу весов, случайное выборочное взвешивание произвольной особи стада в ходе технологии выращивания стада животных или птицы, задают сигнал технологически минимального количества обязательных взвешиваний. По нормативным документам бройлерного птицеводства количество взвешиваемых птиц в выборке из всего многотысячного поголовья птицеводческого помещения равно ста бройлерам. Задают сигнал наибольшей допустимой погрешности измерения средней живой массы особи по стаду животных или птицы, задают сигнал доверительной вероятности попадания сигнала оценки средней по стаду живой массы животного или птицы в доверительный интервал сигналов случайного выборочного взвешивания произвольной особи стада. В зависимости от этого сигнала доверительной вероятности, численно равной площади под кривой линией нормального распределения Гаусса, ограниченной доверительным интервалом аргумента, путем вычисления или путем извлечения из памяти соответствующих технических средств запомненных данных в соответствии с таблицей функции Лапласа формируют сигнал аргумента функции Лапласа. Определяют сигнал факта события размещения особи на грузоприемной платформе весов и формируют сигнал события взвешивания, измеряют количество событий взвешиваний единичных особей стада и формируют сигнал количества взвешиваний произвольных особей стада. Измеряют живую массу произвольной особи стада, формируют сигнал измеренной живой массы произвольной особи стада и запоминают полученные сигналы измеренной живой массы произвольных особей стада. Суммируют сигналы измерений живой массы произвольных особей стада, и полученный суммарный сигнал делят на сигнал количества взвешиваний произвольных особей стада, формируя при этом сигнал оценки средней живой массы особи по стаду животных или птицы, который также является сигналом оценки математического ожидания живой массы особи по стаду животных или птицы. Формируют сигнал оценки среднего квадратического отклонения живой массы особи по стаду, причем величина этого сигнала пропорциональна квадратному корню из суммы квадратов разностей запомненных сигналов измеренной живой массы произвольных особей стада и сигнала оценки математического ожидания живой массы особи по стаду животных или птицы и обратно пропорциональна разности сигнала количества взвешиваний произвольных особей стада и сигнала единицы количества взвешиваний произвольной особи стада. Затем формируют сигнал оценки коэффициента вариации живой массы особей по стаду, пропорциональный умноженному на значение в сто процентов отношению сигнала оценки среднего квадратического отклонения живой массы особи по стаду к сигналу оценки математического ожидания живой массы особи по стаду. Формируют сигнал оценки погрешности измерения средней живой массы особи по стаду, пропорциональный произведению сигнала оценки коэффициента вариации живой массы особей по стаду и сигнала аргумента функции Лапласа, деленному на корень квадратный из сигнала количества взвешиваний произвольных особей стада. Сравнивают сформированный сигнал оценки погрешности измерения средней живой массы особи по стаду с заданным сигналом наибольшей допустимой погрешности измерения средней живой массы особи по стаду животных или птицы. В зависимости от результата сравнения либо продолжают статистическую обработку сигналов процесса взвешивания произвольных особей при превышении значением первого указанного сигнала значения второго указанного сигнала, либо прекращают статистическую обработку сигналов процесса взвешивания произвольных особей при равенстве значений этих указанных сигналов и при превышении значением второго указанного сигнала значения первого указанного сигнала. Последнее действие производят при дополнительном условии равенства и превышения значением сигнала количества случайных взвешиваний значения заданного сигнала технологически минимального количества обязательных взвешиваний. Используют полученные сигналы количества взвешиваний произвольных особей стада, достоверной оценки средней живой массы особи по стаду животных или птицы, оценки среднего квадратического отклонения живой массы особи по стаду, оценки коэффициента вариации живой массы особей по стаду, сигнал оценки погрешности измерения средней живой массы особи по стаду для достоверного информирования персонала сельскохозяйственного помещения, цеха или предприятия при осуществлении управленческих операторских действий с техническими средствами обеспечения технологии выращивания поголовья, а также для подачи их на соответствующие измерительные, управляющие и задающие входы автоматизированного технологического оборудования управления технологией выращивания поголовья.
Дополнительное условие достижения или превышения заданного по технологии минимального количества взвешиваний имеет простое объяснение. Пусть первые два случайных взвешивания дали одинаковый результат. Это означает, что по всего-навсего только двум опытам сразу получена оценка математического ожидания средней живой массы особи по стаду поголовья. При этом и дисперсия (мощность) отклонения оценки случайной величины живой массы от оценки ее среднего значения оценки (от оценки математического ожидания) и собственно среднее квадратическое отклонение оценки случайной величины живой массы от оценки ее среднего значения оценки (от оценки математического ожидания) равны нулю. Тогда равен нулю и коэффициент вариации, зависящая от этого коэффициента вариации погрешность определения оценки среднего значения живой массы особи по стаду при их выборочном взвешивании. Полученное значение погрешности уже после двух взвешиваний стало меньше его изначально заданного значения. Тогда можно, казалось бы, сразу останавливать процесс выборочного взвешивания. Однако этот вывод появился чересчур рано. Продолжение взвешиваний и последующие их результаты покажут, что значения оценок и среднего квадратического отклонения (в знаменателе стоит корень квадратный из разности количества взвешиваний и единицы количества взвешиваний), и коэффициента вариации, и погрешности выборочного взвешивания (в знаменателе стоит корень квадратный из количества взвешиваний) уменьшаются с ростом количества взвешиваний. Поэтому задание по технологии минимального количества обязательных взвешиваний имеет глубокий и теоретический, и практический смысл.
На фиг.2 приведена схема устройства для осуществления способа.
Устройство для осуществления способа содержит электронные весы (весы с грузоприемной платформой и электронным выходом) 12, первый задатчик технологически минимального количества обязательных взвешиваний (первый задатчик) 13, при этом в устройство введены второй задатчик сигнала наибольшей допустимой погрешности измерения средней живой массы особи по стаду животных или птицы (второй задатчик) 14, третий задатчик сигнала доверительной вероятности попадания сигнала оценки средней по стаду живой массы животного или птицы в доверительный интервал сигналов случайного выборочного взвешивания произвольной особи произвольной особи стада (третий задатчик) 15, первый формирователь сигнала аргумента функции Лапласа (первый формирователь) 16, второй формирователь сигнала события взвешивания (могут быть использованы: схема сравнения с задатчиком порогового сигнала, триггер с дифференцирующей цепочкой на его входе и т.п.) (второй формирователь) 17, третий формирователь сигнала количества взвешиваний произвольной особи стада (могут быть использованы: генератор пилообразного напряжения, фантастрон, линейка триггеров, счетчик импульсов и т.п.) (третий формирователь) 18, измеритель сигнала живой массы единичных особей стада 19, четвертый формирователь сигнала измеренной живой массы произвольной особи стада (в аналоговой либо в цифровой форме) (четвертый формирователь) 20, первый блок памяти полученных сигналов измеренной живой массы произвольной особи стада 21, сумматор сигналов измерений живой массы произвольной особи стада 22, делитель полученного суммарного сигнала на сигнал количества взвешиваний произвольной особи стада 23, пятый формирователь сигнала оценки средней живой массы особи по стаду животных или птицы (или формирователь сигнала оценки математического ожидания живой массы особи по стаду животных или птицы) (пятый формирователь) 24, шестой формирователь сигнала оценки среднего квадратического отклонения живой массы особи по стаду (шестой формирователь) 25, второй блок вычисления и формирования сигналов разностей запомненных сигналов измеренной живой массы произвольных особей стада и сигнала оценки математического ожидания живой массы особи по стаду животных или птицы и запоминания вычисленных и сформированных сигналов 26, третий блок возведения в квадратную (вторую) степень и запоминания полученных сигналов квадратов разностей сигналов 27, четвертый блок суммирования полученных сигналов квадратов разностей сигналов 28, четвертый задатчик сигнала соответствия единице количества взвешиваний (четвертый задатчик) 29, пятый блок разности сигнала количества взвешиваний произвольных особей стада и сигнала единицы количества взвешиваний произвольной особи стада 30, первый делитель суммы полученных сигналов квадратов разностей сигналов на сигнал разности сигнала количества взвешиваний произвольных особей стада и сигнала единицы количества взвешиваний произвольной особи стада 31, шестой блок извлечения квадратного корня из сигнала полученного результата деления сигнала суммы квадратов разностей запомненных сигналов измеренной живой массы произвольной особи стада и сигнала оценки математического ожидания живой массы особи по стаду животных или птицы, деленной на разность сигнала количества взвешиваний произвольных особей стада и сигнала единицы количества взвешиваний произвольной особи стада 32, седьмой формирователь сигнала оценки коэффициента вариации живой массы особей по стаду (седьмой формирователь) 33, второй делитель сигнала оценки среднего квадратического отклонения живой массы особи по стаду на сигнал оценки математического ожидания живой массы особи по стаду 34, первый элемент умножения сигнала результата деления на значение в сто процентов 35, пятый задатчик сигнала значения в сто процентов (пятый задатчик) 36, восьмой формирователь сигнала оценки погрешности измерения средней живой массы особи по стаду (восьмой формирователь) 37, шестой задатчик сигнала аргумента функции Лапласа (шестой задатчик) 38, второй элемент умножения сигнала оценки коэффициента вариации живой массы особей по стаду на сигнал аргумента функции Лапласа 39, элемент извлечения квадратного корня из сигнала количества взвешиваний произвольных особей стада 40, третий делитель сигнала полученного произведения сигнала оценки коэффициента вариации живой массы особей по стаду на сигнал аргумента функции Лапласа на корень квадратный из сигнала количества взвешиваний единичных особей стада 41, первая схема сравнения сформированного сигнала оценки погрешности измерения средней живой массы особи по стаду с заданным сигналом наибольшей допустимой погрешности измерения средней живой массы особи по стаду животных или птицы 42, вторая схема сравнения сигнала количества случайных взвешиваний с заданным сигналом технологически минимального количества обязательных взвешиваний 43, управляемый ключ для разрешения дальнейшего прохождения в устройстве сигналов достоверных оценок 44, блок индикации для обслуживающего персонала текущих во времени работы устройства сигналов заключительных достоверных оценок требуемых технологических параметров взвешивания 45, измерительные, управляющие и задающие входы автоматизированного технологического оборудования управления технологией выращивания поголовья и соответствующими ей технологическими процессами 46, блок управления работой устройства 47, при этом электронные весы 12 представляют собой последовательное соединение измерителя сигнала живой массы единичных особей стада 19 и четвертого формирователя сигнала измеренной живой массы произвольной особи стада 20, выход которого через первый блок памяти полученных сигналов измеренной живой массы произвольной особи стада 21 подключен к соединению, которое является первым входом шестого формирователя сигнала оценки среднего квадратического отклонения живой массы особи по стаду 25, входа сумматора сигналов измерений живой массы произвольной особи стада 22 и первого входа второго блока вычисления и формирования сигналов разностей запомненных сигналов измеренной живой массы произвольных особей стада и сигнала оценки математического ожидания живой массы особи по стаду животных или птицы и запоминания вычисленных и сформированных сигналов 26, второй вход которого является вторым входом, первым и вторым выходами шестого формирователя сигнала оценки среднего квадратического отклонения живой массы особи по стаду 25 и подключен к соединению выхода пятого формирователя сигнала оценки средней живой массы особи по стаду животных или птицы 24, первого входа второго делителя сигнала оценки среднего квадратического отклонения живой массы особи по стаду на сигнал оценки математического ожидания живой массы особи по стаду 34, который является первым входом седьмого формирователя сигнала оценки коэффициента вариации живой массы особей по стаду 33, и первого входа управляемого ключа для разрешения дальнейшего прохождения в устройстве сигналов достоверных оценок 44, а выход второго блока вычисления и формирования сигналов разностей запомненных сигналов измеренной живой массы произвольных особей стада и сигнала оценки математического ожидания живой массы особи по стаду животных или птицы и запоминания вычисленных и сформированных сигналов 26 через последовательное соединение третьего блока возведения во вторую степень и запоминания полученных сигналов квадратов разностей сигналов 27, четвертого блока суммирования полученных сигналов квадратов разностей сигналов 28, через первый вход и выход первого делителя суммы полученных сигналов квадратов разностей сигналов на сигнал разности сигнала количества взвешиваний произвольных особей стада и сигнала единицы количества взвешиваний произвольной особи стада 31, через шестой блок извлечения квадратного корня из сигнала полученного результата деления сигнала суммы квадратов разностей запомненных сигналов измеренной живой массы произвольной особи стада и сигнала оценки математического ожидания живой массы особи по стаду животных или птицы, деленной на разность сигнала количества взвешиваний произвольных особей стада и сигнала единицы количества взвешиваний произвольной особи стада 32, подключен к соединению, которое является вторым входом седьмого формирователя сигнала оценки коэффициента вариации живой массы особей по стаду 33, вторых входов второго делителя сигнала оценки среднего квадратического отклонения живой массы особи по стаду на сигнал оценки математического ожидания живой массы особи по стаду 34 и управляемого ключа для разрешения дальнейшего прохождения в устройстве сигналов достоверных оценок 44, выход которого подключен к соединению входов блока индикации для обслуживающего персонала текущих во времени работы устройства сигналов заключительных достоверных оценок требуемых технологических параметров взвешивания 45 и соответствующих измерительных, управляющих и задающих входов автоматизированного технологического оборудования управления технологией выращивания поголовья и соответствующими ей технологическими процессами 46, выход сумматора сигналов измерений живой массы произвольной особи стада 22 соединен со вторым входом делителя полученного суммарного сигнала на сигнал количества взвешиваний произвольной особи стада 23, первый вход которого является третьим входом шестого формирователя сигнала оценки среднего квадратического отклонения живой массы особи по стаду 25 и подключен к соединению выхода третьего формирователя сигнала количества взвешиваний произвольной особи стада 18 с подключенным к его входу второго формирователя сигнала события взвешивания 17, первого входа пятого блока разности сигнала количества взвешиваний произвольных особей стада и сигнала единицы количества взвешиваний произвольной особи стада 30, входа элемента извлечения квадратного корня из сигнала количества взвешиваний произвольных особей стада 40, являющегося первым входом восьмого формирователя сигнала оценки погрешности измерения средней живой массы особи по стаду 37, второго входа второй схемы сравнения сигнала количества случайных взвешиваний с заданным сигналом технологически минимального количества обязательных взвешиваний 43, первый вход и выход которого соединены соответственно с выходом первого задатчика технологически минимального количества обязательных взвешиваний 13 и со вторым управляющим входом управляемого ключа для разрешения дальнейшего прохождения в устройстве сигналов достоверных оценок 44, первый управляющий вход которого подключен к выходу первой схемы сравнения сформированного сигнала оценки погрешности измерения средней живой массы особи по стаду с заданным сигналом наибольшей допустимой погрешности измерения средней живой массы особи по стаду животных или птицы 42, первый вход которого соединен с выходом второго задатчика сигнала наибольшей допустимой погрешности измерения средней живой массы особи по стаду животных или птицы 14, а второй его вход является выходом восьмого формирователя сигнала оценки погрешности измерения средней живой массы особи по стаду 37 и соединением четвертого входа управляемого ключа для разрешения дальнейшего прохождения в устройстве сигналов достоверных оценок 44 и выхода третьего делителя сигнала полученного произведения сигнала оценки коэффициента вариации живой массы особей по стаду на сигнал аргумента функции Лапласа на корень квадратный из сигнала количества взвешиваний единичных особей стада 41, первый и второй входы которого подключены соответственно к выходу элемента извлечения квадратного корня из сигнала количества взвешиваний произвольных особей стада 40 и к выходу второго элемента умножения сигнала оценки коэффициента вариации живой массы особей по стаду на сигнал аргумента функции Лапласа 39, первый вход которого является вторым входом восьмого формирователя сигнала оценки погрешности измерения средней живой массы особи по стаду 37 и также выходом седьмого формирователя сигнала оценки коэффициента вариации живой массы особей по стаду 33 и соединен с выходом первого элемента умножения сигнала результата деления на значение в сто процентов 35 и третьим входом управляемого ключа для разрешения дальнейшего прохождения в устройстве сигналов достоверных оценок 44, ко второму входу второго элемента умножения сигнала оценки коэффициента вариации живой массы особей по стаду на сигнал аргумента функции Лапласа 39 подключен выход последовательного соединения третьего задатчика сигнала доверительной вероятности попадания сигнала оценки средней по стаду живой массы животного или птицы в доверительный интервал сигналов случайного выборочного взвешивания произвольной особи произвольной особи стада 15, первого формирователя сигнала аргумента функции Лапласа 16, шестого задатчика сигнала аргумента функции Лапласа 38, вход которого является третьим входом восьмого формирователя сигнала оценки погрешности измерения средней живой массы особи по стаду 37, первый и второй входы первого элемента умножения сигнала результата деления на значение в сто процентов 35 подключены соответственно к выходу пятого задатчика сигнала значения в сто процентов 36 и к выходу второго делителя сигнала оценки среднего квадратического отклонения живой массы особи по стаду на сигнал оценки математического ожидания живой массы особи по стаду 34, второй вход и выход пятого блока разности сигнала количества взвешиваний произвольных особей стада и сигнала единицы количества взвешиваний произвольной особи стада 30 подключены соответственно к выходу четвертого задатчика сигнала соответствия единице количества взвешиваний 29 и ко второму входу первого делителя суммы полученных сигналов квадратов разностей сигналов на сигнал разности сигнала количества взвешиваний произвольных особей стада и сигнала единицы количества взвешиваний произвольной особи стада 31, а блок управления работой устройства 47 является управляющим блоком устройства.
Устройство работает следующим образом.
Электронные весы (весы с грузоприемной платформой и электронным выходом) 12 дают устойчивый сигнал живой массы взвешиваемой произвольно зашедшей на грузоприемную платформу случайной особи стада животных или птицы. С выхода третьего формирователя сигнала количества взвешиваний произвольной особи стада (могут быть использованы: генератор пилообразного напряжения, фантастрон, линейка триггеров, счетчик импульсов и т.п.) (третий формирователь) 18 в устройство поступает сигнал количества взвешиваний произвольной особи стада. Первый задатчик технологически минимального количества обязательных взвешиваний (первый задатчик) 13, второй задатчик сигнала наибольшей допустимой погрешности измерения средней живой массы особи по стаду животных или птицы (второй задатчик) 14, третий задатчик сигнала доверительной вероятности попадания сигнала оценки средней по стаду живой массы животного или птицы в доверительный интервал сигналов случайного выборочного взвешивания произвольной особи произвольной особи стада (третий задатчик) 15 и первый формирователь сигнала аргумента функции Лапласа (первый формирователь) 16 формируют соответствующие сигналы. Блоки, названные как шестой формирователь сигнала оценки среднего квадратического отклонения живой массы особи по стаду (шестой формирователь) 25, седьмой формирователь сигнала оценки коэффициента вариации живой массы особей по стаду (седьмой формирователь) 33 и восьмой формирователь сигнала оценки погрешности измерения средней живой массы особи по стаду (восьмой формирователь) 37, формируют соответствующие сигналы по известным из математической статистики количественным соотношениям. При сравнении соответствующих сигналов в первой схеме сравнения сформированного сигнала оценки погрешности измерения средней живой массы особи по стаду с заданным сигналом наибольшей допустимой погрешности измерения средней живой массы особи по стаду животных или птицы 42 и во второй схеме сравнения сигнала количества случайных взвешиваний с заданным сигналом технологически минимального количества обязательных взвешиваний на их выходах в какие-то моменты времени появляются и затем действуют сигналы, управляющие моментом начала и затем временем достоверного информирования персонала о параметрах взвешиваемого поголовья. Эти два сигнала поступают на управляющие входы управляемого ключа для разрешения дальнейшего прохождения в устройстве сигналов достоверных оценок 44. Схема совпадения предусмотрена в двухвходовой входной цепи ключа 44 и в целях экономии места в описании на фиг.2 не показана. На блок индикации для обслуживающего персонала текущих во времени работы устройства сигналов заключительных достоверных оценок требуемых технологических параметров взвешивания 45 и на измерительные, управляющие и задающие входы автоматизированного технологического оборудования управления технологией выращивания поголовья и соответствующими ей технологическими процессами 46 посредством блока управления работой устройства 47 подается высокоточная информация о параметрах процесса выборочного взвешивания особей. Перечень некоторых из действий блока 47: управление устройством от суток к очередным суткам выращивания поголовья, очередностью действий над сигналами, а также, например, действие исключения операции деления на нуль при формировании сигнала среднего квадратического отклонения, производятся путем управления началом работы первого делителя суммы полученных сигналов квадратов разностей сигналов на сигнал разности сигнала количества взвешиваний произвольных особей стада и сигнала единицы количества взвешиваний произвольной особи стада 31 со второго по счету взвешивания особи от момента начала процесса взвешиваний и многие другие традиционные хорошо известные действия управления.
На фиг.4 приведена функциональная схема дополнительного устройства по способу при нескольких электронных весах, установленных в производственном помещении или в зоне обитания поголовья.
Дополнительное устройство по способу содержит двое или более электронных весов, установленных в производственном помещении или в зоне обитания поголовья (показаны трое электронных весов 12-1, 12-2, 12-3 в зонах помещения), и соответствующее количество вторых формирователей 17 и третьих формирователей 18 (три вторых формирователя 17-1, 17-2, 17-3 и три третьих формирователя 18-1, 18-2, 18-3 в разных зонах помещения), измерителей сигнала живой массы единичных особей стада 19-1, 19-2, 19-3, четвертых формирователей сигналов измеренной живой массы произвольных особей стада в различных локальных зонах территории производственного помещения или в локальных зонах обитания поголовья (четвертых формирователей) 20-1, 20-2, 20-3, причем блок управления работой устройства 47, обеспечивающий в устройстве по способу разнообразные действия: суммирование сигналов количеств случайных взвешиваний произвольных особей поголовья в разных зонах, накопление, запоминание и суммирование случайных сигналов взвешенной живой массы произвольных особей стада по всем контролируемым электронными весами локальным зонам обитания, в дополнительном устройстве по способу исключает наложение друг на друга одновременно пришедших в устройство сигналов количеств взвешиваний и сигналов живой массы от различных электронных весов из различных зон обитания, производит их соответствующее разделение по времени и соответствующие им временные задержки по отношению друг к другу, а выходы третьих формирователей 18-1, 18-2, 18-3 подключены к соответствующим входам дополнительно введенного в устройство блока формирования суммарного сигнала количества взвешиваний произвольных особей стада на нескольких электронных весах в различных локальных областях территории производственного помещения или в локальных зонах обитания поголовья 48, выходы трех электронных весов 12-1, 12-2, 12-3 или выходы формирователей сигналов измеренной живой массы произвольных особей стада в различных локальных зонах территории производственного помещения или в локальных зонах обитания поголовья (четвертых формирователей) 20-1, 20-2, 20-3 подключены к соответствующим входам дополнительно введенного в дополнительное устройство по способу блока формирования суммарного сигнала измеренной живой массы произвольных особей стада на нескольких электронных весах в различных локальных зонах территории производственного помещения или в локальных зонах обитания поголовья 49.
Устройство работает следующим образом.
Увеличение количества весов имеет своей целью не только увеличение количества взвешиваний. Весы в количестве более одной штуки можно так разместить в производственном помещении или на территории обитания взвешиваемого поголовья, что будет дополнительно учтена и неоднородность живой массы особей стада: ведь в разных зонах среды обитания выращиваемого поголовья условия могут различаться достаточно сильно. Это и наличие сквозняков, и локальных (местных) тепловых и других излучений от размещенного оборудования, различное расстояние линии кормораздачи от ее начала до места кормления особей стада и т.п. Наличие нескольких правильно выбранных технологом мест, оборудованных весами, существенно повышает достоверность оценки живой массы особи по всему стаду. Более полной становится и оценка однородности стада поголовья по величине коэффициента вариации. При этом расширяется перечень функций (действий) блока управления работой устройства 47, обеспечивающего в основном устройстве своевременное суммирование сигналов количеств случайных взвешиваний произвольных особей поголовья в разных зонах, накопление, запоминание и соответствующее суммирование случайных сигналов взвешенной живой массы произвольных особей стада по всем контролируемым электронными весами локальным зонам обитания. Блок 47 также исключает наложение друг на друга одновременно пришедших от различных весов в устройство сигналов количеств взвешиваний и сигналов живой массы, производит их соответствующее разделение по времени и соответствующие их временные задержки. (За неимением дополнительного места в данном описании изобретения по существу и в связи с громоздкостью дополнительного описания достаточно хорошо известных и в целом традиционных действий и технических средств блока управления работой устройства 47 подробное описание его состава и внутренних и внешних связей связи в рамках данного изобретения существенного значения не имеет, поэтому будет неоправданно перегружать описание настоящего изобретения и потому считается излишним и в соответствии с этим утверждением не приводится.)
На фиг.5 приведена общая схема конструкции электронных весов (весов с грузоприемной платформой и электронным выходом) вблизи от ниппельной поилки в производственном помещении для выращивания животных или птицы (на примере бройлеров) с установленным элементом дополнительного светового привлечения особей поголовья (птицы). Электронные весы устройства по способу и дополнительного устройства по способу установлены на бетонном или другом полу животноводческого или птицеводческого помещения, например птичника 50, и возвышаются над древесно-стружечной подстилкой или другой теплоизолирующей подстилкой 51, вблизи от ниппельной поилки в производственном помещении для выращивания животных или птицы, например бройлеров, причем рядом размещенные другие соседние поилки, с целью дополнительного привлечения поголовья к электронным весам, на время проведения процесса выборочных взвешиваний отключены от подачи в них жидкости для питья поголовья, содержит опорную часть конструкции электронных весов 52, грузоприемную платформу 53 электронных весов, дополнительные наклонные поверхности между полом или подстилкой и весоизмерительной поверхностью грузоприемной платформы электронных весов в виде боковой поверхности усеченного конуса при круговой форме горизонтальной грузоприемной платформы весов, либо в виде боковых поверхностей усеченной многоугольной пирамиды при соответствующей многоугольной форме горизонтальной грузоприемной платформы весов 54 с целью облегчения захода на нее тяжелых особей, например бройлеров, в конечной стадии их выращивания, ниппельную поилку 55, участок установленного в птичнике водопровода для поения бройлеров 56, элемент крепления к водопроводной трубе светозащитной арматуры 57, установленный вблизи электронных весов световой прибор для дополнительного привлечения особей поголовья на грузоприемную платформу весов 58 за счет мигающего света от источника освещения для возбуждения дополнительного интереса у особи приблизиться к нему, при этом взойти на весоизмерительную грузоприемную платформу и таким образом дополнительно увеличить количество взвешиваний особей для ускорения процесса измерения живой массы и повышения точности измерений выборочной оценки средней живой массы особи по стаду поголовья.
Устройство работает следующим образом., Увеличение количества заходов особей на весоизмерительную грузоприемную платформу весов достигается одновременным действием нескольких факторов: рядом с весами имеется поилка, соседние поилки на время проведения взвешиваний отключены от воды, рядом с весами просто дополнительно светит или мигает своим светом дополнительно установленный осветительный прибор, подход к грузоприемной площадке облегчен дополнительными наклонными поверхностями (что чрезвычайно важно, например, для бройлеров тяжелых кроссов в конечной стадии выращивания и что подтверждено неоднократно при испытаниях: тяжелая птица весьма неохотно взбирается на обычную весоизмерительную платформу, возвышающуюся на уровнем древесно-стружечной и другого вида подстилки).
Технология выборочного взвешивания идет по пути возможно более полного снижения методической погрешности измерения живой массы особи по всему стаду поголовья животных или птицы. Обеспечивается наилучшее для технологии выращивания в данном производственном помещении и для предприятия в целом соотношение между получаемой точностью измерения живой массы продукции животноводства и птицеводства и количеством случайных взвешиваний особей поголовья (например, бройлеров в птицеводстве). При этом обеспечивается точная техническая статистическая оценка технологических показателей процесса автоматизированного выборочного взвешивания особей поголовья животных и птицы.
Пояснительные подписи к фигурам
Фиг.1 - общая схема технологии и технологического оборудования при выращивании птицы в условиях общего лучистого обогрева цыплят и птичника в промышленном птицеводстве: 1 - теплозащитные ограждающие конструкции помещения птичника; 2 - утепленный пол птичника; 3 - приточная вентиляция; 4 - вытяжная вентиляция; 5 - поголовье птицы; 6 - обогреватели; 7 - энергетическая магистраль; 8 - регулятор температуры; 9, 10 и 11 - весоизмерители для определения живой массы животного или птицы в зоне обитания в производственном помещении.
Фиг.2 - функциональная схема устройства автоматизированной оценки средней по стаду живой массы животного или птицы при случайном выборочном взвешивании произвольной особи стада животных или птицы: 12 - электронные весы (весы с грузоприемной платформой и электронным выходом); 13 - первый задатчик технологически минимального количества обязательных взвешиваний (первый задатчик); 14 - второй задатчик сигнала наибольшей допустимой погрешности измерения средней живой массы особи по стаду животных или птицы (второй задатчик); 15 - третий задатчик сигнала доверительной вероятности попадания сигнала оценки средней по стаду живой массы животного или птицы в доверительный интервал сигналов случайного выборочного взвешивания произвольной особи произвольной особи стада (третий задатчик); 16 - первый формирователь сигнала аргумента функции Лапласа (первый формирователь); 17 - второй формирователь сигнала события взвешивания (могут быть использованы: схема сравнения с задатчиком порогового сигнала, триггер с дифференцирующей цепочкой на его входе и т.п.) (второй формирователь); 18 - третий формирователь сигнала количества взвешиваний произвольной особи стада (могут быть использованы: генератор пилообразного напряжения, фантастрон, линейка триггеров, счетчик импульсов и т.п.) (третий формирователь); 19 - измеритель сигнала живой массы единичных особей стада, 20 - четвертый формирователь сигнала измеренной живой массы произвольной особи стада (в аналоговой, либо в цифровой форме) (четвертый формирователь); 21 - первый блок памяти полученных сигналов измеренной живой массы произвольной особи стада; 22 - сумматор сигналов измерений живой массы произвольной особи стада; 23 - делитель полученного суммарного сигнала на сигнал количества взвешиваний произвольной особи стада, 24 - пятый формирователь сигнала оценки средней живой массы особи по стаду животных или птицы (или формирователь сигнала оценки математического ожидания живой массы особи по стаду животных или птицы) (пятый формирователь); 25 - шестой формирователь сигнала оценки среднего квадратического отклонения живой массы особи по стаду (шестой формирователь); 26 - второй блок вычисления и формирования сигналов разностей запомненных сигналов измеренной живой массы произвольных особей стада и сигнала оценки математического ожидания живой массы особи по стаду животных или птицы и запоминания вычисленных и сформированных сигналов; 27 - третий блок возведения в квадратную (вторую) степень и запоминания полученных сигналов квадратов разностей сигналов; 28 - четвертый блок суммирования полученных сигналов квадратов разностей сигналов; 29 - четвертый задатчик сигнала соответствия единице количества взвешиваний (четвертый задатчик); 30 - пятый блок разности сигнала количества взвешиваний произвольных особей стада и сигнала единицы количества взвешиваний произвольной особи стада; 31 - первый делитель суммы полученных сигналов квадратов разностей сигналов на сигнал разности сигнала количества взвешиваний произвольных особей стада и сигнала единицы количества взвешиваний произвольной особи стада; 32 - шестой блок извлечения квадратного корня из сигнала полученного результата деления сигнала суммы квадратов разностей запомненных сигналов измеренной живой массы произвольной особи стада и сигнала оценки математического ожидания живой массы особи по стаду животных или птицы, деленной на разность сигнала количества взвешиваний произвольных особей стада и сигнала единицы количества взвешиваний произвольной особи стада; 33 - седьмой формирователь сигнала оценки коэффициента вариации живой массы особей по стаду (седьмой формирователь); 34 - второй делитель сигнала оценки среднего квадратического отклонения живой массы особи по стаду на сигнал оценки математического ожидания живой массы особи по стаду; 35 - первый элемент умножения сигнала результата деления на значение в сто процентов; 36 - пятый задатчик сигнала значения в сто процентов (пятый задатчик); 37 - восьмой формирователь сигнала оценки погрешности измерения средней живой массы особи по стаду (восьмой формирователь); 38 - шестой задатчик сигнала аргумента функции Лапласа (шестой задатчик); 39 - второй элемент умножения сигнала оценки коэффициента вариации живой массы особей по стаду на сигнал аргумента функции Лапласа; 40 - элемент извлечения квадратного корня из сигнала количества взвешиваний произвольных особей стада; 41 - третий делитель сигнала полученного произведения сигнала оценки коэффициента вариации живой массы особей по стаду на сигнал аргумента функции Лапласа на корень квадратный из сигнала количества взвешиваний единичных особей стада; 42 - первая схема сравнения сформированного сигнала оценки погрешности измерения средней живой массы особи по стаду с заданным сигналом наибольшей допустимой погрешности измерения средней живой массы особи по стаду животных или птицы; 43 - вторая схема сравнения сигнала количества случайных взвешиваний с заданным сигналом технологически минимального количества обязательных взвешиваний; 44 - управляемый ключ для разрешения дальнейшего прохождения в устройстве сигналов достоверных оценок; 45 - блок индикации для обслуживающего персонала текущих во времени работы устройства сигналов заключительных достоверных оценок требуемых технологических параметров взвешивания; 46 - измерительные, управляющие и задающие входы автоматизированного технологического оборудования управления технологией выращивания поголовья и соответствующими ей технологическими процессами; 47 - блок управления работой устройства (от суток к очередным суткам выращивания поголовья, очередностью действий над сигналами и т.д.).
Фиг.3 - таблица значений функции Лапласа: F(t) - функция Лапласа, t - аргумент функции Лапласа.
Фиг.4 - функциональная схема дополнительного устройства по способу при нескольких электронных весах, установленных в производственном помещении или в зоне обитания поголовья (показаны элементы трех электронных весов 12-1, 12-2, 12-3 в трех зонах помещения) и соответствующем количестве элементов вторых формирователей 17 и третьих формирователей 18 (показаны три вторых формирователя 17-1, 17-2, 17-3 и три третьих формирователя 18-1, 18-2, 18-3): 19-1, 19-2, 19-3 - три измерителя сигнала живой массы единичных особей стада в трех зонах помещения; 20-1, 20-2, 20-3 - три четвертых формирователя сигналов измеренной живой массы произвольных особей стада в трех различных локальных областях территории производственного помещения или в трех локальных зонах обитания поголовья (в аналоговой, либо в цифровой форме) (четвертые формирователи); 47 - блок управления работой устройства, обеспечивающий суммирование сигналов количеств случайных взвешиваний произвольных особей поголовья в разных зонах, накопление, запоминание и суммирование случайных сигналов взвешенной живой массы произвольных особей стада по всем контролируемым электронными весами локальным зонам обитания, исключающий наложение друг на друга одновременно пришедших в устройство сигналов количеств взвешиваний и сигналов живой массы, производящий их соответствующее разделение по времени и соответствующие им временные задержки. 47 - блок управления работой устройства, обеспечивающий суммирование сигналов количеств случайных взвешиваний произвольных особей поголовья в разных зонах, накопление, запоминание и суммирование случайных сигналов взвешенной живой массы произвольных особей стада по всем контролируемым электронными весами локальным зонам обитания, исключающий наложение друг на друга одновременно пришедших в устройство сигналов количеств взвешиваний и сигналов живой массы, производящий их соответствующее разделение по времени и соответствующие им временные задержки (за неимением дополнительного места в данном описании изобретения по существу и в связи с громоздкостью дополнительного описания достаточно хорошо известных и в целом традиционных действий и технических средств блока управления работой устройства 47 подробное описание его состава и внутренних и внешних связей связи в рамках данного изобретения существенного значения не имеют, поэтому будет неоправданно перегружать описание настоящего изобретения и потому считается излишним и в соответствии с этим утверждением не приводится); 48 - блок формирования суммарного сигнала количества взвешиваний произвольных особей стада на нескольких электронных весах в различных локальных областях территории производственного помещения или в локальных зонах обитания поголовья; 49 - блок формирования суммарного сигнала измеренной живой массы произвольных особей стада на нескольких электронных весах в различных локальных зонах территории производственного помещения или в локальных зонах обитания поголовья.
Фиг.5 - общая схема конструкции электронных весов (весов с грузоприемной платформой и электронным выходом) вблизи от ниппельной поилки в производственном помещении для выращивания животных или птицы (на примере бройлеров) с установленным элементом дополнительного светового привлечения особей поголовья (птицы): 50 - бетонный пол птичника; 51 - древесно-стружечная подстилка; 52 - опорная часть конструкции весов; 53 - грузоприемная платформа весов; 54 - наклонные поверхности между полом или подстилкой и весоизмерительной поверхностью грузоприемной платформы электронных весов в виде боковой поверхности усеченного конуса при круговой форме горизонтальной грузоприемной платформы весов, либо в виде боковых поверхностей усеченной пирамиды при соответствующей многоугольной форме горизонтальной грузоприемной платформы весов, 55 - ниппельная поилка; 56 - участок установленного в птичнике водопровода для поения бройлеров; 57 - элемент крепления к водопроводной трубе светозащитной арматуры; 58 - световой прибор для дополнительного привлечения особей поголовья на грузоприемную платформу электронных весов.
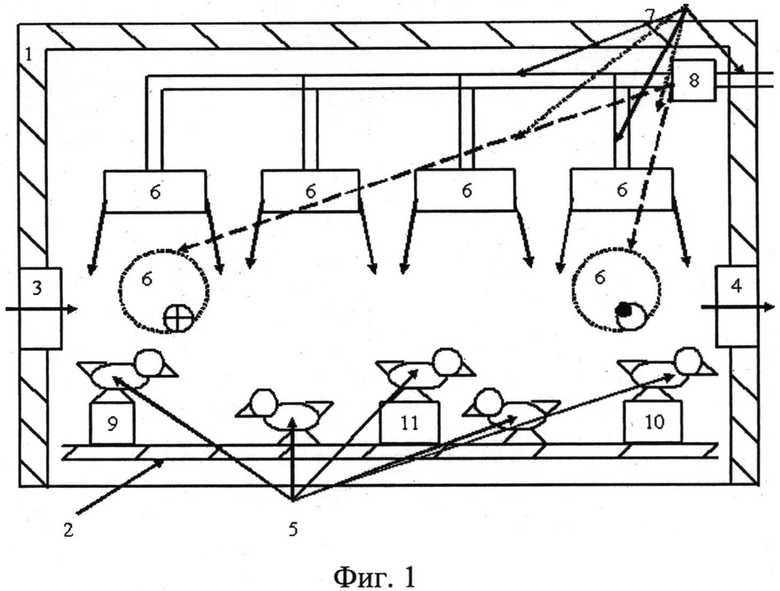
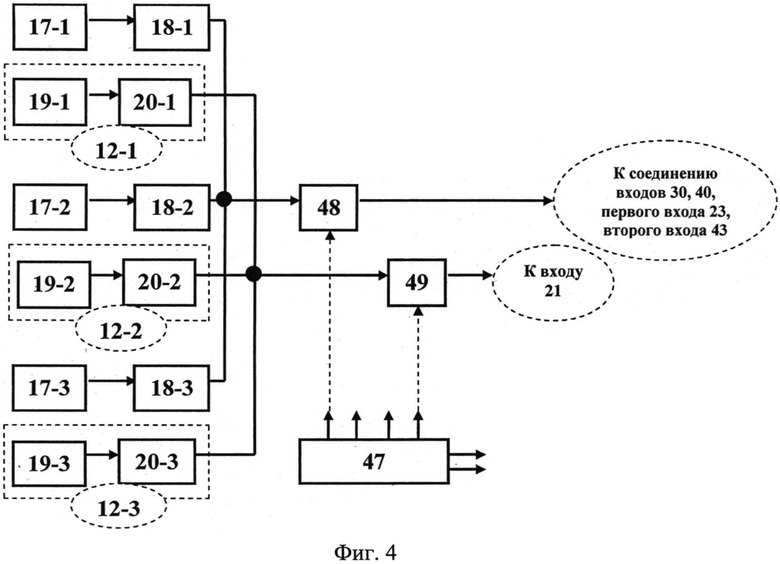
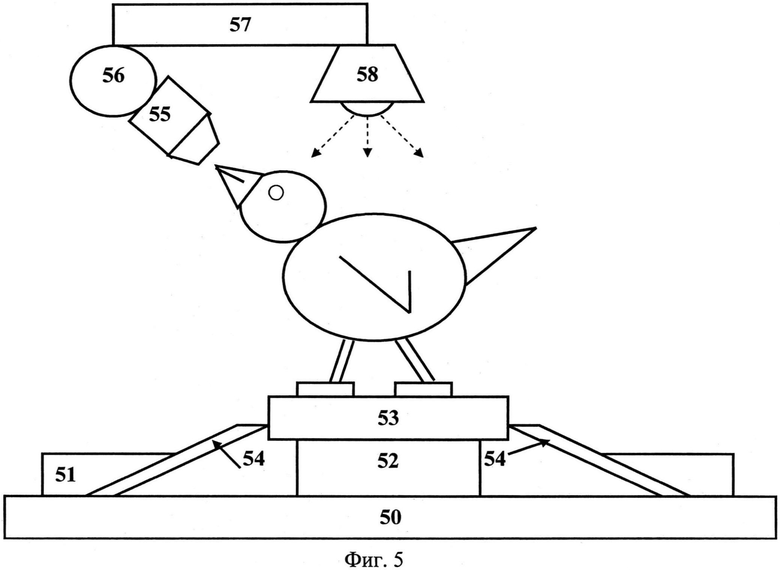
Изобретение относится к технологиям выращивания животных и птицы в области промышленного животноводства и птицеводства. Устройство содержит электронные весы, различные задатчики сигналов, формирователи сигналов, измерители сигналов, различные блоки формирования сигналов, сигнал оценки, схемы сравнения сигналов, управляемый ключ для разрешения дальнейшего прохождения в устройстве сигналов достоверных оценок, технологическое оборудование управления технологией выращивания поголовья и соответствующими ей технологическими процессами, блок управления работой устройства, которые соединены между собой через соответствующие входы и выходы. Обеспечивается повышение точности оценки средней по стаду живой массы животного или птицы при случайном выборочном взвешивании произвольной особи стада для последующего точного управления технологиями и технологическими процессами животноводства и птицеводства. 2 з.п. ф-лы, 5 ил.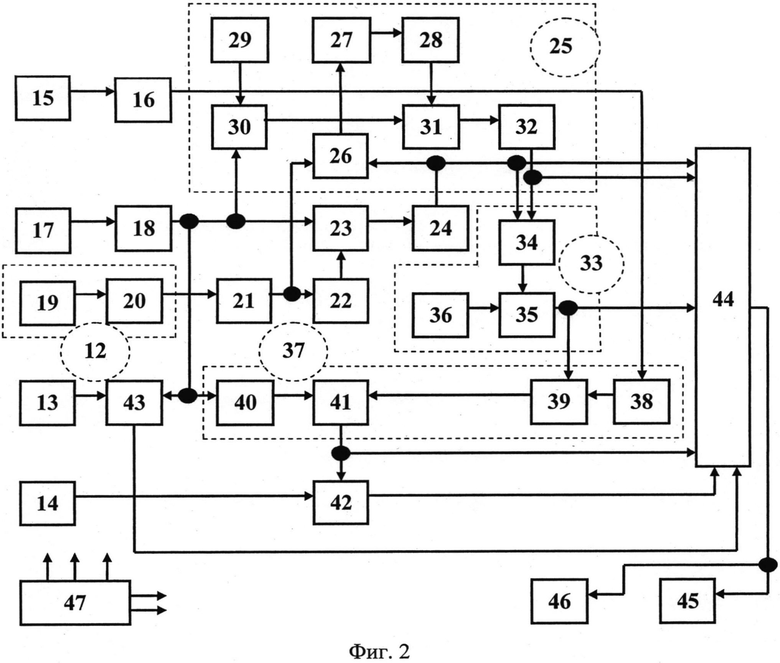
1. Устройство автоматизированной оценки средней по стаду живой массы животного или птицы при случайном выборочном взвешивании произвольной особи стада животных или птицы содержит весы с грузоприемной платформой и электронным выходом, первый задатчик технологически минимального количества обязательных взвешиваний, отличающееся тем, что в устройство введены второй задатчик сигнала наибольшей допустимой погрешности измерения средней живой массы особи по стаду животных или птицы, третий задатчик сигнала доверительной вероятности попадания сигнала оценки средней по стаду живой массы животного или птицы в доверительный интервал сигналов случайного выборочного взвешивания произвольной особи произвольной особи стада, первый формирователь сигнала аргумента функции Лапласа, второй формирователь сигнала события взвешивания, третий формирователь сигнала количества взвешиваний произвольной особи стада, измеритель сигнала живой массы единичных особей стада, четвертый формирователь сигнала измеренной живой массы произвольной особи стада, первый блок памяти полученных сигналов измеренной живой массы произвольной особи стада, сумматор сигналов измерений живой массы произвольной особи стада, делитель полученного суммарного сигнала на сигнал количества взвешиваний произвольной особи стада, пятый формирователь сигнала оценки средней живой массы особи по стаду животных или птицы (или формирователь сигнала оценки математического ожидания живой массы особи по стаду животных или птицы), шестой формирователь сигнала оценки среднего квадратического отклонения живой массы особи по стаду, второй блок вычисления и формирования сигналов разностей запомненных сигналов измеренной живой массы произвольных особей стада и сигнала оценки математического ожидания живой массы особи по стаду животных или птицы и запоминания вычисленных и сформированных сигналов, третий блок возведения в квадратную степень и запоминания полученных сигналов квадратов разностей сигналов, четвертый блок суммирования полученных сигналов квадратов разностей сигналов, четвертый задатчик сигнала соответствия единице количества взвешиваний, пятый блок разности сигнала количества взвешиваний произвольных особей стада и сигнала единицы количества взвешиваний произвольной особи стада, первый делитель суммы полученных сигналов квадратов разностей сигналов на сигнал разности сигнала количества взвешиваний произвольных особей стада и сигнала единицы количества взвешиваний произвольной особи стада, шестой блок извлечения квадратного корня из сигнала полученного результата деления сигнала суммы квадратов разностей запомненных сигналов измеренной живой массы произвольной особи стада и сигнала оценки математического ожидания живой массы особи по стаду животных или птицы, деленной на разность сигнала количества взвешиваний произвольных особей стада и сигнала единицы количества взвешиваний произвольной особи стада, седьмой формирователь сигнала оценки коэффициента вариации живой массы особей по стаду, второй делитель сигнала оценки среднего квадратического отклонения живой массы особи по стаду на сигнал оценки математического ожидания живой массы особи по стаду, первый элемент умножения сигнала результата деления на значение в сто процентов, пятый задатчик сигнала значения в сто процентов, восьмой формирователь сигнала оценки погрешности измерения средней живой массы особи по стаду, шестой задатчик сигнала аргумента функции Лапласа, второй элемент умножения сигнала оценки коэффициента вариации живой массы особей по стаду на сигнал аргумента функции Лапласа, элемент извлечения квадратного корня из сигнала количества взвешиваний произвольных особей стада, третий делитель сигнала полученного произведения сигнала оценки коэффициента вариации живой массы особей по стаду на сигнал аргумента функции Лапласа на корень квадратный из сигнала количества взвешиваний единичных особей стада, первая схема сравнения сформированного сигнала оценки погрешности измерения средней живой массы особи по стаду с заданным сигналом наибольшей допустимой погрешности измерения средней живой массы особи по стаду животных или птицы, вторая схема сравнения сигнала количества случайных взвешиваний с заданным сигналом технологически минимального количества обязательных взвешиваний, управляемый ключ для разрешения дальнейшего прохождения в устройстве сигналов достоверных оценок, блок индикации для обслуживающего персонала текущих во времени работы устройства сигналов заключительных достоверных оценок требуемых технологических параметров взвешивания, измерительные, управляющие и задающие входы автоматизированного технологического оборудования управления технологией выращивания поголовья и соответствующими ей технологическими процессами, блок управления работой устройства, при этом электронные весы представляют собой последовательное соединение измерителя сигнала живой массы единичных особей стада и четвертого формирователя сигнала измеренной живой массы произвольной особи стада, выход которого через первый блок памяти полученных сигналов измеренной живой массы произвольной особи стада подключен к соединению, которое является первым входом шестого формирователя сигнала оценки среднего квадратического отклонения живой массы особи по стаду, входа сумматора сигналов измерений живой массы произвольной особи стада и первого входа второго блока вычисления и формирования сигналов разностей запомненных сигналов измеренной живой массы произвольных особей стада и сигнала оценки математического ожидания живой массы особи по стаду животных или птицы и запоминания вычисленных и сформированных сигналов, второй вход которого является вторым входом, первым и вторым выходами шестого формирователя сигнала оценки среднего квадратического отклонения живой массы особи по стаду и подключен к соединению выхода пятого формирователя сигнала оценки средней живой массы особи по стаду животных или птицы, первого входа второго делителя сигнала оценки среднего квадратического отклонения живой массы особи по стаду на сигнал оценки математического ожидания живой массы особи по стаду, который является первым входом седьмого формирователя сигнала оценки коэффициента вариации живой массы особей по стаду, и первого входа управляемого ключа для разрешения дальнейшего прохождения в устройстве сигналов достоверных оценок, а выход второго блока вычисления и формирования сигналов разностей запомненных сигналов измеренной живой массы произвольных особей стада и сигнала оценки математического ожидания живой массы особи по стаду животных или птицы и запоминания вычисленных и сформированных сигналов через последовательное соединение третьего блока возведения во вторую степень и запоминания полученных сигналов квадратов разностей сигналов, четвертого блока суммирования полученных сигналов квадратов разностей сигналов, через первый вход и выход первого делителя суммы полученных сигналов квадратов разностей сигналов на сигнал разности сигнала количества взвешиваний произвольных особей стада и сигнала единицы количества взвешиваний произвольной особи стада, через шестой блок извлечения квадратного корня из сигнала полученного результата деления сигнала суммы квадратов разностей запомненных сигналов измеренной живой массы произвольной особи стада и сигнала оценки математического ожидания живой массы особи по стаду животных или птицы, деленной на разность сигнала количества взвешиваний произвольных особей стада и сигнала единицы количества взвешиваний произвольной особи стада, подключен к соединению, которое является вторым входом седьмого формирователя сигнала оценки коэффициента вариации живой массы особей по стаду, вторых входов второго делителя сигнала оценки среднего квадратического отклонения живой массы особи по стаду на сигнал оценки математического ожидания живой массы особи по стаду и управляемого ключа для разрешения дальнейшего прохождения в устройстве сигналов достоверных оценок, выход которого подключен к соединению входов блока индикации для обслуживающего персонала текущих во времени работы устройства сигналов заключительных достоверных оценок требуемых технологических параметров взвешивания и соответствующих измерительных, управляющих и задающих входов автоматизированного технологического оборудования управления технологией выращивания поголовья и соответствующими ей технологическими процессами, выход сумматора сигналов измерений живой массы произвольной особи стада соединен со вторым входом делителя полученного суммарного сигнала на сигнал количества взвешиваний произвольной особи стада, первый вход которого является третьим входом шестого формирователя сигнала оценки среднего квадратического отклонения живой массы особи по стаду и подключен к соединению выхода третьего формирователя сигнала количества взвешиваний произвольной особи стада с подключенным к его входу второго формирователя сигнала события взвешивания, первого входа пятого блока разности сигнала количества взвешиваний произвольных особей стада и сигнала единицы количества взвешиваний произвольной особи стада, входа элемента извлечения квадратного корня из сигнала количества взвешиваний произвольных особей стада, являющегося первым входом восьмого формирователя сигнала оценки погрешности измерения средней живой массы особи по стаду, второго входа второй схемы сравнения сигнала количества случайных взвешиваний с заданным сигналом технологически минимального количества обязательных взвешиваний, первый вход и выход которого соединены соответственно с выходом первого задатчика технологически минимального количества обязательных взвешиваний и со вторым управляющим входом управляемого ключа для разрешения дальнейшего прохождения в устройстве сигналов достоверных оценок, первый управляющий вход которого подключен к выходу первой схемы сравнения сформированного сигнала оценки погрешности измерения средней живой массы особи по стаду с заданным сигналом наибольшей допустимой погрешности измерения средней живой массы особи по стаду животных или птицы, первый вход которого соединен с выходом второго задатчика сигнала наибольшей допустимой погрешности измерения средней живой массы особи по стаду животных или птицы, а второй его вход является выходом восьмого формирователя сигнала оценки погрешности измерения средней живой массы особи по стаду и соединением четвертого входа управляемого ключа для разрешения дальнейшего прохождения в устройстве сигналов достоверных оценок и выхода третьего делителя сигнала полученного произведения сигнала оценки коэффициента вариации живой массы особей по стаду на сигнал аргумента функции Лапласа на корень квадратный из сигнала количества взвешиваний единичных особей стада, первый и второй входы которого подключены соответственно к выходу элемента извлечения квадратного корня из сигнала количества взвешиваний произвольных особей стада и к выходу второго элемента умножения сигнала оценки коэффициента вариации живой массы особей по стаду на сигнал аргумента функции Лапласа, первый вход которого является вторым входом восьмого формирователя сигнала оценки погрешности измерения средней живой массы особи по стаду и также выходом седьмого формирователя сигнала оценки коэффициента вариации живой массы особей по стаду и соединен с выходом первого элемента умножения сигнала результата деления на значение в сто процентов и третьим входом управляемого ключа для разрешения дальнейшего прохождения в устройстве сигналов достоверных оценок, ко второму входу второго элемента умножения сигнала оценки коэффициента вариации живой массы особей по стаду на сигнал аргумента функции Лапласа подключен выход последовательного соединения третьего задатчика сигнала доверительной вероятности попадания сигнала оценки средней по стаду живой массы животного или птицы в доверительный интервал сигналов случайного выборочного взвешивания произвольной особи произвольной особи стада, первого формирователя сигнала аргумента функции Лапласа, шестого задатчика сигнала аргумента функции Лапласа, вход которого является третьим входом восьмого формирователя сигнала оценки погрешности измерения средней живой массы особи по стаду, первый и второй входы первого элемента умножения сигнала результата деления на значение в сто процентов подключены соответственно к выходу пятого задатчика сигнала значения в сто процентов и к выходу второго делителя сигнала оценки среднего квадратического отклонения живой массы особи по стаду на сигнал оценки математического ожидания живой массы особи по стаду, второй вход и выход пятого блока разности сигнала количества взвешиваний произвольных особей стада и сигнала единицы количества взвешиваний произвольной особи стада подключены соответственно к выходу четвертого задатчика сигнала соответствия единице количества взвешиваний и ко второму входу первого делителя суммы полученных сигналов квадратов разностей сигналов на сигнал разности сигнала количества взвешиваний произвольных особей стада и сигнала единицы количества взвешиваний произвольной особи стада, а блок управления работой устройства является управляющим блоком устройства.
2. Устройство по п.1, отличающееся тем, что оно содержит двое или более электронных весов, установленных в производственном помещении или в зоне обитания поголовья, и соответствующее количество вторых формирователей и третьих формирователей, измерителей сигнала живой массы единичных особей стада, четвертых формирователей, причем блок управления работой устройства, обеспечивающий в устройстве по способу разнообразные действия: суммирование сигналов количеств случайных взвешиваний произвольных особей поголовья в разных зонах, накопление, запоминание и суммирование случайных сигналов взвешенной живой массы произвольных особей стада по всем контролируемым электронными весами локальным зонам обитания, в дополнительном устройстве исключает наложение друг на друга одновременно пришедших в устройство сигналов количеств взвешиваний и сигналов живой массы от различных электронных весов из различных зон обитания, производит их соответствующее разделение по времени и вырабатывает соответствующие им временные задержки по отношению друг к другу, а выходы третьих формирователей подключены к соответствующим входам введенного в дополнительное устройство блока формирования суммарного сигнала количества взвешиваний произвольных особей стада на нескольких электронных весах в различных локальных областях территории производственного помещения или в локальных зонах обитания поголовья, выходы электронных весов или выходы формирователей сигналов измеренной живой массы произвольных особей стада в различных локальных зонах территории производственного помещения или в локальных зонах обитания поголовья (четвертых формирователей) подключены к соответствующим входам введенного в дополнительное устройство блока формирования суммарного сигнала измеренной живой массы произвольных особей стада на нескольких электронных весах в различных локальных зонах территории производственного помещения или в локальных зонах обитания поголовья.
3. Устройство по п.1 или 2, отличающееся тем, что электронные весы устройства по способу и дополнительного устройства по способу установлены на бетонном или другом полу животноводческого или птицеводческого помещения, например птичника, и возвышаются над древесно-стружечной подстилкой или другой подстилкой, вблизи от ниппельной поилки в производственном помещении для выращивания животных или птицы, например бройлеров, причем рядом размещенные другие соседние поилки, с целью дополнительного привлечения поголовья к электронным весам, на время проведения процесса выборочных взвешиваний отключены от подачи в них жидкости для питья поголовья, содержит опорную часть конструкции электронных весов, грузоприемную платформу электронных весов, дополнительные наклонные поверхности между полом или подстилкой и весоизмерительной поверхностью грузоприемной платформы электронных весов в виде боковой поверхности усеченного конуса при круговой форме горизонтальной грузоприемной платформы весов, либо в виде боковых поверхностей усеченной многоугольной пирамиды при соответствующей многоугольной форме горизонтальной грузоприемной платформы весов с целью облегчения захода на нее тяжелых особей, например бройлеров, в конечной стадии их выращивания, ниппельную поилку, участок установленного в птичнике водопровода для поения бройлеров, элемент крепления к водопроводной трубе светозащитной арматуры, установленный вблизи электронных весов световой прибор для дополнительного привлечения особей поголовья на грузоприемную платформу весов за счет мигающего света от источника освещения для возбуждения дополнительного интереса у особи приблизиться к нему, при этом взойти на весоизмерительную грузоприемную платформу и таким образом дополнительно увеличить количество взвешиваний особей для ускорения процесса измерения живой массы и повышения точности измерений выборочной оценки средней живой массы особи по стаду поголовья.
| Прибор для промывания газов | 1922 |
|
SU20A1 |
| Найдено из интернет: http://www.bigdutchman.ua/ptizevodstvo/otkorm_brojlerov/oborudovanie | |||
| RU 2052247 C1, 20.01.1996 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ ВЫРАЩИВАНИЯ ПТИЦЫ | 2007 |
|
RU2340172C1 |
| СПОСОБ ОТБОРА СЕЛЬСКОХОЗЯЙСТВЕННОЙ ПТИЦЫ | 1993 |
|
RU2050775C1 |
| US 2007056529 A1, 15.03.2007. | |||

