Изобретение относится к сельскому хозяйству, в частности к способам для контроля продуктивности мясной птицы и устройствам для их реализации.
Известно устройство для взвешивания мясной птицы в процессе ее выращивания в клеточных батареях, состоящее из взвешиваемой клетки с выборочной группой птиц, опирающейся на силоизмерительные датчики, и блока управления, причем выборочная группа птиц с суточного возраста содержится в контрольной клетке и непрерывно взвешивается в течение всего цикла выращивания [а.с. СССР №1572470. Устройство для определения средней живой массы птицы / P.M.Славин, Г.А.Харатян, Т.П.Волосович // Открытия. Изобретения. 1990. №23]. Для расширения диапазона измерения массы применен метод кусочно-линейной аппроксимации характеристики первичного преобразователя массы.
Недостатком известного устройства является невозможность его применения для контроля за живой массой птицы при ее напольном содержании, поскольку оно (устройство) работает по принципу группового стационарного взвешивания бройлеров, а для технологии напольного содержания птицы больше подходит режим индивидуального взвешивания.
Наиболее близким по технической сущности к предлагаемому способу является способ и устройство для взвешивания птицы при ее напольном содержании, состоящее из грузоприемного приспособления в виде насеста, снабженного силоизмерительным датчиком, и блока управления [Григоришвили Т.Г. Электрификация и автоматизация операции взвешивания мясных цыплят в процессе их откорма // Автореферат диссертации. Москва (ВИЭСХ), 1972]. Птица, садясь на насест, своим весом действует на силоизмерительный датчик, сигнал от которого поступает на вход блока управления, который регистрирует массу птицы.
Недостаток известного способа взвешивания бройлеров заключается в том, что при посадке птицы на насест возникают механические колебания, которые отрицательно сказываются на результате измерения. Для уменьшения влияния этих помех на точность взвешивания не проводят статистическую обработку получаемой от первичного преобразователя массы информации, а ограничиваются лишь ожиданием до затухания этих колебаний. Кроме того, этот способ может быть применен преимущественно при взвешивании взрослой птицы. Для цыплят до среднего возраста он малоэффективен, так как насест не доступен для птицы этого возраста. И наконец, не учтены вопросы репрезентативности выборки от генеральной совокупности, т.е. какое должно быть количество взвешиваемых бройлеров, чтобы с определенной точностью и достоверностью судить о средней живой массе птицы по стаду.
Задачей предлагаемого изобретения является повышение точности определения средней живой массы бройлеров по стаду при их напольном содержании, обеспечение непрерывного контроля за живой массой птицы в течение всего цикла выращивания начиная с суточного возраста до сдачи ее в убойный цех и предоставление персоналу информации о количестве взвешенных в данный момент цыплят-бройлеров, о их средней живой массе и о текущей погрешности репрезентативности выборки.
В результате использования предлагаемого изобретения повышается точность определения средней живой массы бройлеров по стаду при их напольном содержании, обеспечивается непрерывный контроль за живой массой птицы начиная с суточного возраста до конца цикла ее выращивания с выдачей информации о количестве взвешенных в данный момент цыплят-бройлеров, об их средней живой массе и о текущей погрешности репрезентативности выборки.
Вышеуказанный технический результат достигается тем, что в предлагаемом способе для определения средней живой массы бройлеров при их напольном содержании, включающем автоматическое индивидуальное взвешивание отдельных птиц с помощью электронных весов, установленных в птичнике, измерение массы птицы с некоторой задержкой после ее наступления на весовую платформу, расширение диапазона измерения электронных весов путем кусочно-линейной аппроксимации характеристики силоизмерительного датчика, массу птицы измеряют во время питья воды, при ее состоянии минимальной двигательной активности на весовой платформе, причем контроль за живой массой цыплят-бройлеров производят непрерывно в течение всего цикла выращивания, начиная с суточного возраста до сдачи их в убойный цех, после взвешивания каждого очередного бройлера предоставляют текущую информацию о количестве взвешенных в данный момент цыплят-бройлеров, о их средней живой массе и о погрешности репрезентативности при данном объеме выборки, а уменьшение влияния динамических помех, обусловленных двигательной активностью птицы на результат измерения обеспечивают путем проведения серии многократных измерений массы каждой взвешиваемой птицы, причем репрезентативность выборки обеспечивают путем взвешивания определенного количества бройлеров, средняя масса которых с достаточной точностью и достоверностью характеризует среднюю живую массу птицы по стаду.
Технический результат достигается также тем, что в устройство для определения средней живой массы бройлеров по стаду при их напольном содержании, содержащее грузоприемное приспособление, снабженное силоизмерительным датчиком, и блок управления, снабженный элементом задержки для задерживания процесса измерения массы птицы до затухания первоначальных переходных процессов, происходящих при наступлении птицы на грузоприемное приспособление, элементами задания и выбора масштабных коэффициентов при кусочно-линейной аппроксимации характеристики силоизмерительного датчика для расширения диапазона измерения массы, дополнительно вводят весовую платформу круглой формы в качестве грузоприемного приспособления, по диаметру рассчитанную на одного цыпленка-бройлера любого возраста и опирающуюся на силоизмерительный датчик, помещенный в цилиндрический корпус для его защиты от загрязнения, к которому прикреплена ступенчатая дорожка, по которой цыпленок, поднимаясь на весовую платформу, пьет воду из резервуара воды и одновременно взвешивается, причем резервуар воды, снабженный боковыми ограждениями, обеспечивающими доступ птицы к воде исключительно со стороны весовой платформы, в свою очередь прикреплен к вертикальной оси штатива с возможностью регулирования его высоты относительно весовой платформы, которая в свою очередь может перемещаться по горизонтальному основанию штатива, что позволит регулировать расположение весовой платформы относительно резервуара воды в зависимости от возраста птицы, а также введены счетчик количества взвешиваемых бройлеров, элемент вычитания для тарировки весов, элемент задания массы «тары», элементы задания и выбора масштабных коэффициентов, элемент суммирования и осреднения результатов многократных измерений одного бройлера, элемент суммирования и осреднения результатов многократных взвешиваний множества бройлеров и дисплей для отображения текущей информации, при этом выход силоизмерительного датчика через элемент задержки подключен к входу счетчика количества взвешиваемых бройлеров и к первому входу элемента вычитания, второй вход которого подключен к выходу элемента задания массы «тары», а выход соединен с информационным входом схемы выбора масштабных коэффициентов, многоканальные входы которой подключены к выходам элемента задания масштабных коэффициентов, а информационный выход через первый элемент суммирования и осреднения результатов многократных измерений массы одного бройлера подключен к информационному входу второго элемента суммирования и осреднения результатов многократных взвешиваний множества бройлеров, управляющий вход которого соединен с выходом счетчика количества взвешиваемых бройлеров, а информационный выход соединен со входом дисплея для отображения текущей информации.
Сущность предлагаемого изобретения поясняется фиг.1, фиг.2, фиг.3 и фиг.4.
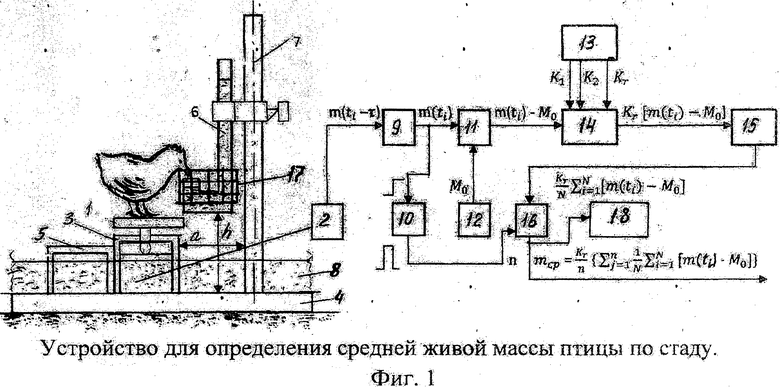
На фиг.1 приведена общая схема устройства для определения средней живой массы птицы по стаду.
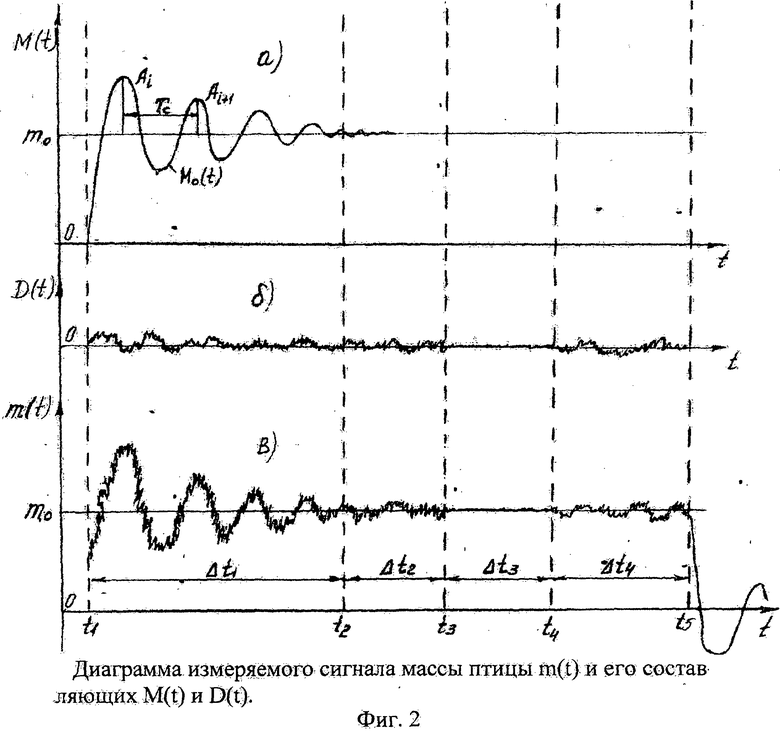
На фиг.2 приведена диаграмма измеряемого сигнала массы птицы m(t) и его составляющих M(t) и D(t).
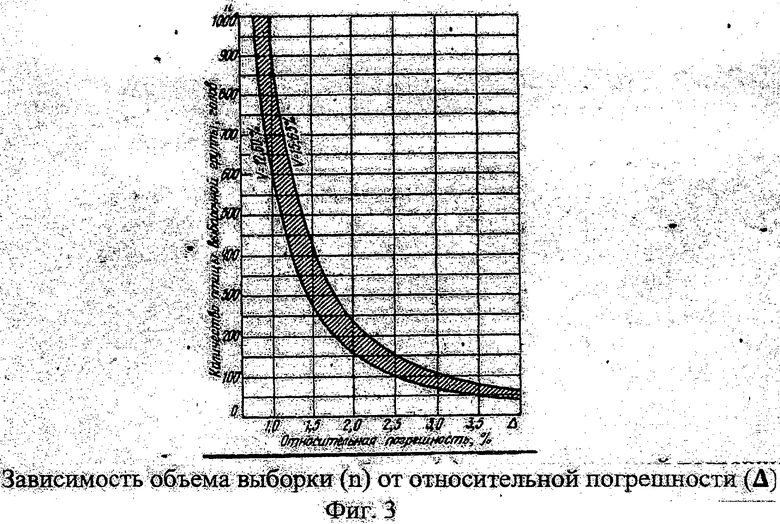
На фиг.3 приведен график зависимости объема выборки (n) от относительной погрешности (Δ).
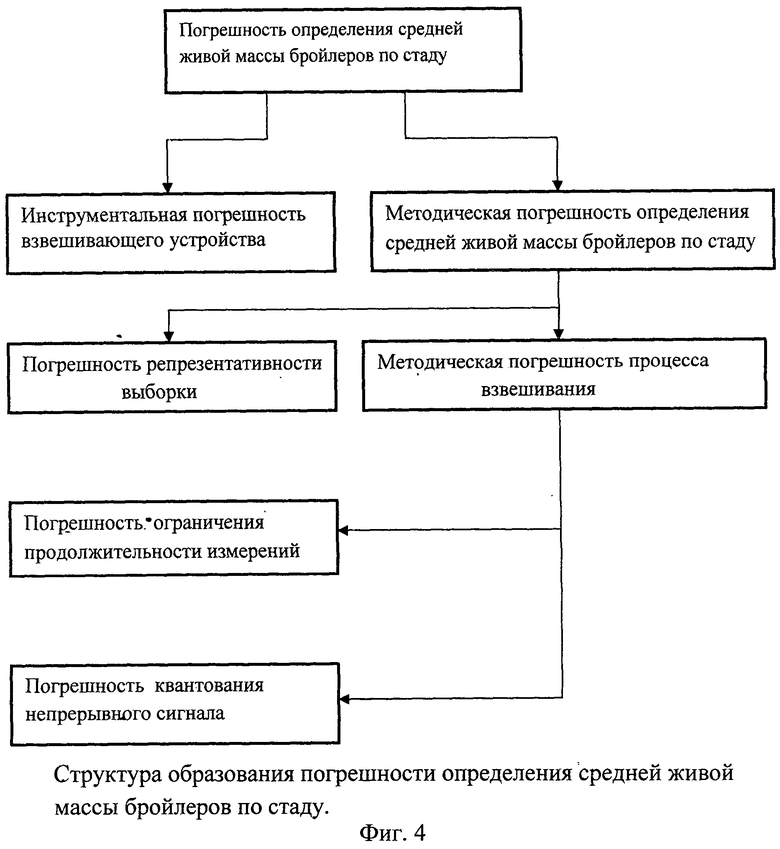
На фиг.4 приведена структура образования погрешности определения средней живой массы бройлеров по стаду.
1. Устройство для определения средней живой массы птицы по стаду содержит весовую платформу 1, снабженную силоизмерительным датчиком 2, цилиндрический корпус 3, защищающий силоизмерительный датчик от загрязнений, ступенчатую дорожку 5 для удобства подъема птицы на весовую платформу 1, горизонтальное основание штатива 4, резервуар питьевой воды 6, вертикальную ось штатива 7, боковые ограждения 17 для обеспечения доступа к питьевой воде исключительно со стороны весовой платформы 1 и блок вычислительных операций, в свою очередь содержащий элемент задержки 9, задерживающий процесс измерения массы птицы на некоторое определенное время для успокоения весовой платформы от механических колебаний, счетчик 10 для определения количества взвешиваемых бройлеров, элемент вычитания 11 для определения массы птицы без «тары», элемент задания массы «тары» 12, элемент задания масштабных коэффициентов 13, элемент выбора масштабных коэффициентов 14, элемент суммирования и осреднения результатов серии N независимых измерений массы одного цыпленка 15, элемент суммирования и осреднения результатов индивидуальных взвешиваний n цыплят-бройлеров 16 и дисплей 18 для отображения текущей информации о количестве взвешенных в данный момент цыплят-бройлеров, об их средней живой массе и о погрешности репрезентативности при данном объеме выборки.
Устройство работает следующим образом.
После того как птица наступает на весовую платформу, сигнал от преобразователя силы 2 через элемент задержки 9 поступает на первый вход элемента вычитания 11, на второй вход которого с выхода элемента задания массы «тары» 12 поступает сигнал М0, пропорциональный массе тары, причем величина задержки Δt1, равная продолжительности переходных процессов, связанных с механическими колебаниями весовой платформы, определяется экспериментальным путем исходя из характеристик динамических помех (см. фиг.2). В результате на выходе элемента вычитания 11 получается сигнал [m(ti)-M0], представляющий собой результат текущего i-го измерения массы птицы без «тары», который поступает на информационный вход элемента выбора масштабных коэффициентов 14, на многоканальный вход которого поступает сигнал выбранного масштабного коэффициента Kr от элемента задания масштабных коэффициентов 13. В результате на выходе элемента 14 получается сигнал Kr[m(ti)-M0], представляющий собой результат i-го измерения массы птицы уже в единицах измерения массы (кг), который поступает на вход элемента суммирования и осреднения результатов многократных измерений массы одного бройлера 15 для дальнейшей обработки. Для повышения точности взвешивания в условиях динамических помех, возникших в результате движения птицы на весовой платформе 1, производится серия многократных измерений одного и того же цыпленка в N раз с интервалом дискретизации Δt. После накопления результатов серии измерений N в элементе 15 производится их суммирование и осреднение. В результате на выходе элемента 15 получается сигнал, пропорциональный массе одного j-ого бройлера, т.е.
Далее в элементе 16 производится накопление статистических данных о результатах взвешиваний n цыплят-бройлеров, их суммирование и осреднение, после чего на его выходе получается значение средней живой массы птицы по стаду с заданной точностью и достоверностью, т.е.


где n - количество взвешиваемых бройлеров, формируемое на выходе счетчика импульсов 10, на вход которого поступает скачкообразный сигнал от преобразователя силы 2 в момент наступления птицы на весовую платформу.
Одно из преимуществ предлагаемого устройства (а также и способа в целом) заключается в том, что персонал может непосредственно следить за процессом взвешивания птицы. Это означает, что после каждого j-го взвешиваемого бройлера, по результатам имеющейся в данный момент статистики, устройство определяет текущее значение массы птицы, которое представляет собой всего лишь оценку искомого значения средней живой массы птицы по стаду. А с какой точностью и достоверностью эта оценка характеризует среднюю живую массу птицы по стаду, можно судить исходя из графика зависимости Δ=f(n), заложенного в памяти блока вычислительных операций, где Δ - относительная погрешность репрезентативности, а n - объем выборки (см. фиг.3). В результате, после каждого взвешивания на экран дисплея 18 выводится информация о количестве взвешенных в данный момент бройлеров, их средняя живая масса, и с какой точностью она соответствует действительной средней живой массе птицы по стаду.
2. Сущность предлагаемого способа поясняется фиг.1, фиг.2, фиг.3 и фиг.4.
Средняя живая масса бройлеров по стаду определяется в течение всего периода выращивания птицы, начиная с суточного возраста до сдачи ее в убойный цех, причем процедура взвешивания производится автоматически во время питья воды, когда птица находится в состоянии наименьшей двигательной активности, при котором динамические помехи, связанные с движением птицы на весовой платформе, незначительны и мало влияют на результат измерений. С этой целью в качестве грузоприемного приспособления используется маленькая весовая платформа 1 круглой формы (диаметром не более 10 см), по площади рассчитанная для нахождения на ней не более одного цыпленка-бройлера любого возраста (см. фиг.1), и опирающаяся на тензометрический силоизмерительный датчик 2, находящийся внутри цилиндрического корпуса 3 высотой примерно 10-12 см относительно горизонтального основания 4 штатива, к вертикальной оси 7 которого прикреплен резервуар воды 6 с боковыми ограждениями 17, обеспечивающими доступ птицы к воде исключительно со стороны весовой платформы. Такая высота весовой платформы от пола обусловлена тем, что она должна быть выше, чем толщина слоя подстилки 8. Для обеспечения доступа суточного цыпленка на весовую платформу 1 для питья воды, к корпусу цилиндра прикреплена ступенчатая дорожка 5 шириной не более 7 см, причем вся конструкция, включающая ступенчатую дорожку 5, цилиндрический корпус 3, весовую платформу 1, силоизмерительный датчик 2, может передвигаться по горизонтальной площади по отношению к вертикальной оси 7 штатива, а резервуар воды 6 в свою очередь может переместиться по вертикальной плоскости, регулируя его высоту по отношению горизонтального основания 4 штатива. Это позволяет регулировать взаиморасположение весовой платформы 1 и резервуара воды 6 таким образом, чтобы птице было удобно пользоваться водой в любом ее возрасте. Таким образом, поднимаясь на весовую платформу 1 для питья воды, птица автоматически взвешивается, и ее масса регистрируется в блоке вычислительных операций.
Заведомо, что процесс измерения массы птицы и соответственно конструкция механической части устройства выполнены таким образом, чтобы птица взвешивалась именно во время питья воды, когда она находится в состоянии наименьшей двигательной активности. При этом динамические помехи практически отсутствуют и результат взвешивания в наибольшей степени соответствует измеряемой массе птицы.
На фиг.2 приведена диаграмма измеряемого сигнала массы птицы m(t) и его составляющих M(t) и D(t), причем m(t)=M(t)+D(t), a M(t)=m0+M0(t), где m0 - значение живой массы птицы; M0(t) - центрированное значение функции M(t), характеризующей переходный процесс после скачкообразного изменения сигнала, получаемого от первичного преобразователя массы при наступлении птицы на весовую платформу; D(t) - динамические помехи, обусловленные нормальной двигательной активностью птицы, т.е. движением птицы на весовой платформе.
Как видно из диаграммы, в момент времени t1, когда птица наступает на весовую платформу, получается скачок измеряемого сигнала m(t), после чего начинается переходный процесс в виде затухающих колебаний с продолжительностью Δt1. После затухания первоначальных механических колебаний M0(t), по ходу движения птицы к резервуару воды, продолжаются мелкие колебания (динамические помехи - D(t)), обусловленные нормальной двигательной активностью птицы (интервал времени Δt2). С момента времени t3, когда птица останавливается и начинает пить воду, ее состояние характеризуется наименьшей двигательной активностью (интервал времени Δt3), при котором динамические помехи D(t) практически отсутствуют. Поэтому желательно процедуру взвешивания птицы провести в этом интервале времени. Далее, начиная с момента времени t4 птица перестает пить воду и, проходя обратно через весовую платформу (интервал времени Δt4), спускается с нее. При этом в момент времени t5 происходит обратный скачок измеряемого сигнала с последующим переходным процессом, чем и заканчивается цикл нахождения птицы на весовой платформе.
Из вышеизложенного следует, что для упрощения процедуры и фильтрации полезного сигнала от помех, а также повышения точности взвешивания целесообразно начинать процесс измерения массы птицы с некоторой задержкой, не меньшей продолжительности переходных процессов Δt1, возникших при наступлении птицы на весовую платформу, причем величина этой задержки определяется экспериментальным путем исходя из числовых характеристик затухающей составляющей самого переходного процесса (см. фиг.2). Величину продолжительности переходных процессов можно оценить с помощью выражения 
Например, при требуемом Kзат=5% - ному уровню затухания сигнала, коэффициенте затухания kзат=75% и периоде повторения собственных колебаний системы Tc=0,2 сек для продолжительности переходного процессa получим Δt1=3 сек. Это означает, что при взвешивании птицы процесс измерения ее массы следует начинать не раньше, чем через 3 сек после ее наступления на весовую платформу. За это время она спокойно может преодолеть 10 см пространство весовой платформы и оказаться у резервуара воды. Так что интервала времени Δt2 может и не быть, т.е. Δt2=0, а может и затянуться на несколько секунд, если цыпленок будет гулять по весовой платформе. Но судя по визуальным наблюдениям, это случается редко, и цыпленок, как правило, обязательно доходит до резервуара воды за 3-5 сек. Визуальные наблюдения также показали, что процесс питья воды для разных возрастов птицы может длиться от 5 до 10 сек. Это дает основание для предположения, что после Δt1=3 сек задержки измерения массы птицы вероятность того, что за это время цыпленок окажется около резервуара воды и начнет пить воду, очень большая, и при проведении процесса взвешивания в это время даст возможность получения высокой точности измерения. А если процесс взвешивания по времени будет охватывать интервалы Δt2, Δt3, Δt4, ,система предусматривает многократное измерение массы птицы с определенными параметрами дискретизации и дальнейшее осреднение результатов этих измерений. Это позволяет повысить точность взвешивания за счет уменьшения влияния динамических помех, связанных с движением птицы на весовой платформе. Для достижения этой цели при взвешивании каждого бройлера производится серия многократных измерений, с последующим осреднением их результатов, причем количество (N) и интервал (Δt) этих измерений (параметры дискретизации измеряемого аналогового сигнала - m(t)) зависят от числовых характеристик протекающих колебаний.
Определим параметры дискретизации измеряемого аналогового сигнала m(t), рассматривая его как случайный процесс. Продолжительность серии измерений, представляющая собой T=N Δt, определяется с помощью выражения [Романенко А.Ф., Сергеев Г.А. Вопросы прикладного анализа случайных процессов. - М.: Советское радио, 1968. - 256 с.]

где D - дисперсия измеряемого сигнала, τкор - интервал корреляции, ε - допустимая погрешность в абсолютных единицах, причем дисперсия D и интервал корреляции τкор определяются исходя из обработки статистических данных, полученных экспериментальным путем. Для этой цели, рассматривая изменение сигнала m(t) по времени как случайный процесс, по полученным статистическим данным и по известной методике, пользуясь таблицей типичных функций, приведенной в [Гмурман В.Е. Теория вероятностей и математическая статистика. - М.: Высшая школа, 1977. 479 с.], получается аналитическое выражение для нормированной корреляционной функции - ρкор(τ), а затем и значение интервала корреляции - τкор, пользуясь формулой [Романенко А.Ф., Сергеев Г.А. Вопросы прикладного анализа случайных процессов. - М.: Советское радио, 1968. - 256 с.]
Далее по известным значениям дисперсии D и интервала коррекции τкор при заданном значении требуемой точности ε, пользуясь формулой (1), определяется продолжительность серии измерений Т.
Величина интервала дискретизации определяется с помощью 2-й теоремы Котельникова, согласно которой Δt≤1/2 fcp, где fcp=ωср/2π - частота среза (частота Найквиста), по отношению к которой высокие гармоники «отбрасываются», а ωср - угловая частота среза, которая в свою очередь определяется с помощью выражения
где δ - требуемая точность,
или исходя из графика спектральной плотности, построенной по типовым корреляционным функциям, приведенным в [Романенко А.Ф., Сергеев Г.А. Вопросы прикладного анализа случайных процессов. - М.: Советское радио, 1968. - 256 с.].
По известным значениям продолжительности серии измерений Т и интервала дискретизации Δt из выражения N=T/Δt определяется количество измерений.
Таким образом, для обеспечения требуемой точности взвешивания птицы ε в условиях наличия динамических помех, обусловленных ее нормальной двигательной активностью на весовой платформе, необходимо произвести N независимых отсчетов с интервалом времени Δt и, соответственно, продолжительностью T=N Δt.
Предлагаемый способ взвешивания птицы и соответственно конструкция механической части устройства, осуществляющего этот способ, рассчитаны на измерение массы цыплят-бройлеров начиная с суточного возраста до окончания цикла их выращивания. Ступенчатая дорожка, ведущая к весовой платформе, малогабаритная весовая платформа, способная принимать только одного цыпленка-бройлера и имеющая возможность передвижения по горизонтальной плоскости относительно вертикальной оси штатива, куда крепится резервуар воды с боковыми ограждениями, обеспечивающими доступ к воде исключительно со стороны весовой платформы, причем резервуар воды в свою очередь может передвигаться по вертикальной плоскости относительно весовой платформы, - все эти обстоятельства позволяют взвешивать одновременно только одного цыпленка-бройлера любого возраста, начиная с суточного до взрослой птицы.
Поскольку масса суточного цыпленка и масса взрослой птицы отличаются друг от друга примерно 50-60 раз, то их взвешивание одними и теми же весами с одинаковой точностью практически невозможно из-за нелинейности характеристики первичного преобразователя массы, особенно в нижних и верхних ее участках. Поэтому, в данном случае, требуется расширение диапазона взвешивания путем кусочно-линейной аппроксимации характеристики первичного преобразователя массы, сущность которого заключается в том, что его характеристика разбивается на многочисленные элементарные участки, каждый из которых считается линейным, и в зависимости от величины входного сигнала выбирается соответствующий элементарный участок с соответствующим масштабным коэффициентом для преобразования массы в электрический сигнал.
Репрезентативность (представительность) выборки обеспечивается путем взвешивания определенного количества бройлеров таким образом, чтобы их средняя масса с достаточной точностью и достоверностью характеризовала среднюю живую массу птицы по стаду. Из теории математической статистики известно, что объем выборки от генеральной совокупности зависит от степени рассеянности (дисперсии или среднего квадратического отклонения) измеряемого параметра относительно его среднего значения. Для нормального распределения случайной величины, каковым является распределение массы птицы по стаду, поскольку все участники этого «сообщества» содержатся в одинаковых условиях и величина их массы зависит от множества мелких факторов, каждый из которых не имеет явное преимущество по отношению к другим (условие нормальности распределения случайной величины), объем выборки определяется формулой
где σ - среднее квадратическое отклонение массы птицы от среднего значения; δ - требуемая точность в абсолютных единицах; t - аргумент функции Лапласа, который определяется из равенства 2Ф(t)=γ, заданного в виде таблицы, где γ - доверительная вероятность [Бендат Дж., Пирсол А. Прикладной анализ случайных данных: Пер. с англ. - М.: Мир, 1989. - 540 с.].
На практике для определения объема выборки удобно пользоваться формулой n=(vt/Δ)2, где v=(σ/m0)100% - коэффициент вариации, Δ=(δ/Δm0)100% - относительная погрешность, m0 - среднее значение измеряемого параметра. На фиг.3 приведен график зависимости объема выборки (n) от относительной погрешности (Δ), полученный в результате обработки статистических данных, полученных нами при еженедельных контрольных измерениях живой массы порядка 400 голов цыплят-бройлеров на протяжении всего периода выращивания на птицефабрике «Бронницкая» Московской области. Как видно из графика на фиг.3, при объеме выборки 100 голов, как рекомендуется по технологическим нормам контроля за живой массой птицы согласно ГОСТ 18292-85, методическая погрешность репрезентативности составляет 2,5-3,0% в зависимости от значения коэффициента вариации, который в разных возрастах птицы принимает разные значения. Например в суточном возрасте v=12,6%, а в конце периода выращивания, увеличиваясь, достигает уровня v=15,6%.
Необходимо отметить, что полученные результаты на фиг.3 характерны для птицы данного вида (кросса), при содержании в данных конкретных условиях (тип оборудования, параметры микроклимата и т.д.). Для птицы другого вида в других условиях выращивания получатся другие данные. Поэтому для каждого конкретного случая должны быть обработаны свои статистические данные и определены соответствующие числовые характеристики, позволяющие построить аналогичный график зависимости n=f(Δ) для определения объема выборки в новых условиях содержания.
Причем статистические данные для исследования и определения числовых характеристик динамических помех, а также аналогичные характеристики для определения объема выборки можно получить с помощью предлагаемого устройства, при его установке на объекте и настройке по всем вышеупомянутым параметрам, обеспечивающим необходимую точность и достоверность полученной информации о средней живой массе бройлеров по стаду.
Из вышеизложенного следует, что для определения этих параметров, необходимо соблюдать следующую последовательность действий:
1) Регистрация аналогового сигнала, получаемого от преобразователя силы m(t) с помощью самопишущего прибора;
2) Изучение измеряемого сигнала m(t) и его составляющих М(t) и D(t) методами теорий механических и электрических колебаний, а также теории случайных процессов (см. фиг.2):
а) Определение значения интервала затухания Δt1 механических колебаний M(t), возникающих при наступлении птицы на весовую платформу, пользуясь выражением 
б) Определение параметров дискретизации измеряемого аналогового сигнала m(t): продолжительность серии измерений - Т, интервал дискретизации - Δt и количество отсчетов - N, для цифровой фильтрации полезного сигнала от динамических помех - D(t):
1. Определение оценок математического ожидания - m0 и дисперсии - D измеряемого сигнала m(t), рассматривая его как случайный процесс;
2. Определение корреляционной (или нормированной корреляционной) функции случайного процесса m(t), пользуясь выражением

где 
3. Получение аналитического выражения корреляционной (или нормированной корреляционной) функции K(τ) с помощью метода наименьших квадратов, сущность которого заключается в том, что наилучшего согласования предполагаемой теоретической кривой и экспериментальных точек можно достичь путем обращения к минимуму суммы квадратов отклонений экспериментальных точек от сглаживающей кривой;
4. Определение интервала корреляции τкор с помощью таблиц, приведенных в литературных источниках, исходя из аналитического выражения корреляционной (или нормированной корреляционной) функции
5. Определение продолжительности измерения массы птицы с помощью выражения T≥2D τкор/ε2 при известных значениях дисперсии D, интервала корреляции τкор и требуемой точности ε;
6. Определение аналитического выражения спектральной плотности S(ω) измеряемого сигнала m(t) исходя из его нормированной корреляционной функции ρ(τ) с помощью преобразования Фурье
или с помощью таблиц для типовых корреляционных (или нормированных корреляционных) функций, приведенных в вышеуказанных литературных источниках;
7. Определение частоты среза ωср (частота Найквиста) с помощью выражения
где δ - требуемая точность;
8. Определение интервала дискретизации по теореме Котельникова с помощью выражения
9. Определение количества отсчетов или количества измерений массы взвешиваемой птицы с помощью выражения 
3) Определение количества взвешиваемых птиц n, обеспечивающих репрезентативность выборки:
а) Сбор и обработка статистических данных о массе птицы не менее 3-х возрастных категорий;
б) Определение числовых характеристик массы птицы как случайной величины: m0 - среднее значение массы птицы в данномвозрасте; σ - среднее квадратическое отклонение массы птицы от среднего значения; коэффициент вариации массы птицы 
в) Определение количества взвешиваемых птиц - n, средняя масса которых с достаточной точностью - Δ и достоверностью (доверительной вероятностью) - γ характеризует среднюю живую массу птицы по стаду, пользуясь выражением 
Таким образом, определенные по данной методике значения параметров - длительность серии измерений массы птицы - Т, интервал дискретизации - Δt и количество отсчетов - N, а также количество взвешиваемых бройлеров - n, необходимое для обеспечения требуемого объема выборки, в виде зависимости n=f(Δ),- вводятся в память блока вычислительных операций в качестве исходных данных для пользования ими во время эксплуатации предлагаемого устройства в данных конкретных условиях птичника для данного конкретного вида (кросса) птицы.
КОНКРЕТНЫЙ ПРИМЕР ВЫПОЛНЕНИЯ ПРЕДЛАГАЕМОГО СПОСОБА
Проведем анализ всех погрешностейю образующих общую погрешность «определения средней живой массы птицы по стаду».
На фиг.4 приведена блок-схема структуры образования погрешности «определения средней живой массы бройлеров по стаду».
Как видно из блок-схемы на фиг.4, общая погрешность «определения средней живой массы бройлеров по стаду» образуется из «инструментальной погрешности взвешиваемого устройства» и «методической погрешности определения средней живой массы бройлеров по стаду», которая состоит из «погрешности репрезентативности выборки» и « методической погрешности процесса взвешивания», которая в свою очередь образуется из «погрешности ограничения продолжительности измерений», обусловленной выбором значения параметра продолжительности серии измерений Т, и «погрешности квантования непрерывного сигнала», обусловленной выбором значения параметра интервала дискретизации Δt.
В предлагаемом изобретении технический результат по повышению точности определения средней живой массы бройлеров по стаду достигается исключительно за счет уменьшения «методической погрешности определения средней живой массы бройлеров по стаду», а не «инструментальной погрешности взвешиваемого устройства».
Рассмотрим отдельные составляющие «методической погрешности определения средней живой массы бройлеров по стаду» и проведем сравнительный анализ между предлагаемым изобретением, «аналогом» и «прототипом» по этим составляющим погрешности.
а) Погрешность репрезентативности выборки
Исходя из приведенной выше формулы (2) погрешность репрезентативности выборки определяется из выражения
где n - объем выборки, т.е. количество взвешиваемых бройлеров; 
Для сравнения погрешностей репрезентативности при двух разных объемах выборки n1 и n2 при прочих равных условиях получим
Например, если в «аналоге» [а.с. СССР №1572470. Устройство для определения средней живой массы птицы / P.M.Славин, Г.А.Харатян, Т.П.Волосович // Открытия, Изобретения. 1990. №23] количество взвешиваемых бройлеров ограничено размерами экспериментальной клетки и равно, например, для оборудования клеточного содержания типа 2Б-3 120 гол., то в предлагаемом изобретении можно взвешивать неограниченное количество птиц. Например, при объеме выборки 150 гол., из выражения (П-2) следует, что при применении предлагаемого изобретения «погрешность репрезентативности выборки» уменьшается 1,12 раза по сравнению с «аналогом».
А в «прототипе» [Григоришвили Т.Г. Электрификация и автоматизация операции взвешивания мясных цыплят в процессе их откорма // Автореферат диссертации. Москва (ВИЭСХ), 1972] результаты взвешиваний регистрируются в виде аналогового сигнала без его фильтрации от динамических помех, связанных с движением птицы на насесте, и без учета вопроса репрезентативности выборки. При обработке регистрированного материала некоторый объем выборки все же набирается, но это количество ни коей мере не достигает требуемого по ГОСТ 18292-85 объема выборки - 100 гол. Если взять объем выборки «прототипа» n1=100 гол., а предлагаемого изобретения - 150 гол., то из выражения (П-2) получится, что «погрешность репрезентативности выборки» при применении предлагаемого изобретения снизится по сравнению с «прототипом» на 1,225 раза.
б) Методическая погрешность процесса взвешивания
«Методическая погрешность процесса взвешивания» возникает при обработке измеряемого сигнала с целью фильтрации полезного сигнала от динамических помех, обусловленных нормальной двигательной активностью птицы на весовой платформе. При аналоговой обработке измеряемого сигнала его среднее значение, представляющее собой среднюю живую массу птицы, определяется путем интегрирования и осреднения этого сигнала на достаточно большом интервале времени Т.

На практике T (продолжительность измерений) не может быть бесконечно большим, поэтому вместо математического ожидания измеряемого сигнала получаем его оценку, и чем больше эта оценка отличается от математического ожидания, тем больше получается величина так называемой «погрешности ограничения продолжительности измерений» (см. фиг.4).
При цифровой обработке информации интеграл (П-3) замещается суммой

где m(ti) - значение измеряемого сигнала в момент времени ti; N - количество отсчетов в интервале времени T=Δt N, где Δt - шаг (или интервал) дискретизации. Чем меньше интервал дискретизации Δt, тем результат суммирования m0(циф), определенный по формуле (П-4), ближе к результату интегрирования m0(ан) по формуле (П-3), и насколько они будут отличаться друг от друга, настолько и будет оцениваться величина так называемой «погрешности квантования непрерывного сигнала» (см. фиг.4).
Таким образом, «методическая погрешность процесса взвешивания» образуется из двух составляющих: «погрешности ограничения продолжительности измерений» и «погрешности квантования непрерывного сигнала».
«Погрешность ограничения продолжительности измерений» - ε определяется исходя из приведенного выше выражения (1)
где D - дисперсия, а τкор - интервал корреляции измеряемого сигнала; Т - продолжительность измерений.
Эта погрешность присутствует и при аналоговой и при цифровой обработке данных, а ее величина не зависит от способа обработки информации, а зависит от спектральных и корреляционных свойств динамических помех:
дисперсии - D, интервала корреляции - τкор, а также от продолжительности измерений - Т.
Что касается «погрешности квантования непрерывного сигнала», то в отличие от «погрешности ограничения продолжительности измерений» она имеет место исключительно при цифровой обработке информации и зависит от частотных характеристик динамических помех, обусловленных движением птицы на весовой платформе. Величина этой погрешности зависит от выбора интервала дискретизации Δt, определяемой по 2-й теореме Котельникова Δt=1/2fc, где fc - частота среза, по отношению к которой высокие гармоники «отбрасываются». Она оценивается с помощью выражения

В итоге, общая «методическая погрешность процесса взвешивания» - εмет, состоящая из «погрешности ограничения продолжительности измерений» - ε и «погрешности квантования непрерывного сигнала» - δ, определяется общеизвестной формулой «суммирования» независимых погрешностей

Проведем сравнительный анализ «методической погрешности процесса взвешивания» и ее составляющих при применении «аналога», «прототипа» и предлагаемого изобретения.
1. Сравнительный анализ предлагаемого изобретения с «аналогом»
В обоих случаях величина «методической погрешности процесса взвешивания» зависит от характеристик динамических помех и от «качества» фильтрации полезного сигнала от этих помех, т.е. от правильного выбора параметров дискретизации измеряемого сигнала: интервала дискретизации - Δt; количества отсчетов - N и продолжительности измерений - T=N Δt, - обеспечивающих требуемую точность - εмет.
В предлагаемом изобретении взвешивание птицы происходит во время питья воды, при ее наименьшей двигательной активности, когда динамические помехи практически отсутствуют и измеряемый сигнал с достаточно высокой точностью представляет статическую массу взвешиваемой птицы.
Фильтрация полезного сигнала от динамических помех в данном случае носит дополнительный характер для сохранения высокой точности взвешивания, в случае когда цыпленок перед или после питья воды продолжает находиться на весовой платформе и ходить по ней. Что касается «аналога», то в связи с тем, что контрольная группа бройлеров непрерывно взвешивается в течение всего цикла выращивания, там постоянно присутствуют динамические помехи, которые отрицательно влияют на результат измерений. Причем в данном случае, недостаточно глубоко изучены спектральные и корреляционные свойства измеряемого сигнала как случайного процесса, в результате чего выбранные параметры дискретизации(Т, Δt и N) не обеспечивают достаточной точности статистической обработки информации.
В итоге, с точки зрения степени влияния динамических помех на результат измерения массы птицы, предлагаемое изобретение выглядит более предпочтительным по сравнению с «аналогом», поскольку в предлагаемом изобретении процесс взвешивания птицы происходит непосредственно во время питья воды, когда птица находится в состоянии наименьшей двигательной активности, при котором динамические помехи практически отсутствуют.
Из вышеизложенного следует, что «методическая погрешность процесса взвешивания» у предлагаемого изобретения меньше, чем у «аналога».
2. Сравнительный анализ предлагаемого изобретения с «прототипом»
В «прототипе» не предусмотрена фильтрация полезного сигнала от динамических помех, обусловленных движением птицы на насесте.
В данном случае при взвешивании птицы фиксируется лишь мгновенное значение измеряемого сигнала без учета влияния случайных механических колебаний на результат измерений, амплитуда которых, судя по экспериментальным данным, полученным при испытании автоматизированной системы группового взвешивания бройлеров, при их клеточном содержании на птицефабрике «Бронницкая» Московской области, может достичь 5-10% от среднего значения массы птицы, в зависимости от ее двигательной активности.
Что касается предлагаемого изобретения, то благодаря глубокому анализу корреляционных и спектральных свойств динамических помех определяются параметры статистической обработки измеряемого сигнала, т.е. продолжительность измерений - Т, интервал дискретизации - Δt и количество отсчетов - N, обеспечивающие заданную точность взвешивания.
Это позволяет обрабатывать измеряемый аналоговый сигнал цифровыми методами, позволяющими фильтрировать полезный сигнал от динамических помех, обусловленных движением птицы на весовой платформе, и обеспечивать высокую точность взвешивания.
Например, по результатам группового взвешивания бройлеров при их клеточном содержании при проведении испытаний на «Бронницкой» птицефабрике «методическая погрешность процесса взвешивания», обусловленная дискретизацией измеряемого непрерывного сигнала с целью избавления от динамических помех, составляла примерно 0,5%, в то время, когда без фильтрации этих помех и без статистической обработки данных, как это происходит в «прототипе», погрешность измерения массы птицы получается в несколько раз выше, поскольку максимальное отклонение мгновенного значения измеряемой величины от ее среднего значения по экспериментальным данным составляет 5-10%. При этом, согласно общеизвестному «правилу трех сигм» (3σ) из курса «теории вероятностей и математической статистики», средняя квадртическая погрешность измерения массы птицы при применении «прототипа» составит примерно 1,6-3,3% в зависимости от двигательной активности птицы.
Таким образом, мы провели подробный сравнительный анализ предлагаемого изобретения, «аналога» и «прототипа» по всем составляющим «методической погрешности определения средней живой массы бройлеров по стаду».
Результаты анализа показывают, что по величине «погрешности репрезентативности выборки» «аналог» и «прототип» превышают предлагаемое изобретение на 1,12 и 1,225 раза соответственно, а по величине «методической погрешности процесса взвешивания» «аналог» и «прототип» также превышают предлагаемое изобретение, причем у «прототипа» эта погрешность составляет примерно 1,6-3,3%, а у предлагаемого изобретения - примерно 0,5%.
Способ определения средней живой массы бройлеров по стаду при их напольном содержании включает автоматическое измерение массы птицы во время питья воды, при ее состоянии минимальной двигательной активности. Контроль производят непрерывно в течение всего цикла выращивания. После взвешивания каждого бройлера предоставляют текущую информацию о количестве взвешенных в данный момент цыплят-бройлеров, об их средней живой массе и о текущей погрешности репрезентативности при данном объеме выборки. Уменьшение влияния динамических помех, обусловленных двигательной активностью птицы, на результат измерения обеспечивают путем проведения серии многократных измерений массы каждой взвешиваемой птицы, причем репрезентативность выборки обеспечивают путем взвешивания определенного количества бройлеров, средняя масса которых с достаточной точностью и достоверностью характеризует среднюю живую массу птицы по стаду. Изобретение касается также устройства для реализации указанного способа. Техническим результатом является повышение точности определения средней живой массы бройлеров по стаду при их напольном содержании. 2 н.п. ф-лы, 1 пр., 4 ил.
1. Способ определения средней живой массы бройлеров по стаду при их напольном содержании, включающий автоматическое индивидуальное взвешивание отдельных птиц с помощью электронных весов, установленных в птичнике, измерение массы птицы с некоторой задержкой после ее наступления на весовую платформу, расширение диапазона измерения электронных весов путем кусочно-линейной аппроксимации характеристики силоизмерительного датчика, отличающийся тем, что массу птицы измеряют во время питья воды, при ее состоянии минимальной двигательной активности на весовой платформе, причем контроль за живой массой цыплят-бройлеров производят непрерывно в течение всего цикла выращивания, начиная с суточного возраста до сдачи их в убойный цех, после взвешивания каждого очередного бройлера предоставляют текущую информацию о количестве взвешенных в данный момент цыплят-бройлеров, об их средней живой массе и о погрешности репрезентативности при данном объеме выборки, а уменьшение влияния динамических помех, обусловленных двигательной активностью птицы, на результат измерения обеспечивают путем проведения серии многократных измерений массы каждой взвешиваемой птицы, причем репрезентативность выборки обеспечивают путем взвешивания определенного количества бройлеров, средняя масса которых с достаточной точностью и достоверностью характеризует среднюю живую массу птицы по стаду.
2. Устройство для определения средней живой массы бройлеров по стаду при их напольном содержании, содержащее грузоприемное приспособление, снабженное силоизмерительным датчиком, и блок управления, снабженный элементом задержки для задерживания процесса измерения массы птицы до затухания первоначальных переходных процессов, происходящих при наступлении птицы на грузоприемное приспособление, элементами задания и выбора масштабных коэффициентов при кусочно-линейной аппроксимации характеристики силоизмерительного датчика для расширения диапазона измерения массы, отличающееся тем, что дополнительно содержит весовую платформу круглой формы в качестве грузоприемного приспособления, по диаметру рассчитанную для одного цыпленка-бройлера и опирающуюся на силоизмерительный датчик, помещенный в цилиндрический корпус для его защиты от загрязнения, к которому прикреплена ступенчатая дорожка, по которой цыпленок, поднимаясь на весовую платформу, пьет воду из резервуара воды и одновременно взвешивается, причем резервуар воды, снабженный боковыми ограждениями, обеспечивающими доступ птицы к воде исключительно со стороны весовой платформы, в свою очередь прикреплен к вертикальной оси штатива с возможностью регулирования его высоты относительно весовой платформы, которая в свою очередь может перемещаться по горизонтальному основанию штатива, что позволяет регулировать расположение весовой платформы относительно резервуара воды в зависимости от возраста птицы, а также в устройство введены счетчик количества взвешиваемых бройлеров, элемент вычитания для тарировки весов, элемент задания массы «тары», элемент суммирования и осреднения результатов многократных измерений одного бройлера и элемент суммирования и осреднения результатов многократных взвешиваний множества бройлеров и дисплей для отображения текущей информации, при этом выход силоизмерительного датчика через элемент задержки подключен к входу счетчика количества взвешиваемых бройлеров и к первому входу элемента вычитания, второй вход которого подключен к выходу элемента задания массы «тары», а выход соединен с информационным входом элемента выбора масштабных коэффициентов, многоканальные входы которого подключены к выходам элемента задания масштабных коэффициентов, а информационный выход через первый элемент суммирования и осреднения результатов многократных измерений массы одного бройлера подключен к информационному входу второго элемента суммирования и осреднения результатов многократных взвешиваний множества бройлеров, управляющий вход которого соединен с выходом счетчика количества взвешиваемых бройлеров, а информационный выход соединен с входом дисплея для отображения текущей информации.
| Устройство для счета и определения веса мелкой птицы | 1935 |
|
SU44722A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ВЫРАЩИВАНИЯ ПТИЦЫ | 2007 |
|
RU2340172C1 |
| Устройство для придания волокнистой ленте ложной крутки в зоне питания прядильной машины | 1981 |
|
SU1074918A1 |

