Настоящая заявка притязает на приоритет предварительной заявки US 61/384084, зарегистрированной 17 сентября 2010 г.
Область техники, к которой относится изобретение
Настоящее изобретение относится к способам и устройству для управления направлением движения бурильной колонны в продуктивном пласте (пласте-коллекторе) в толще горных пород.
Уровень техники
Буровое оборудование, используемое при разведке нефтяных месторождений, позволяет бурить горизонтальные скважины в толще горных пород. Как правило, горизонтальное бурение осуществляют в пласте пород, представляющем особый интерес, например в нефтесодержащем или продуктивном пласте. При бурении желательно удерживаться в пределах этого продуктивного пласта, не отклоняясь в соседний пласт. Известно, что соседние пласты обычно обладают электромагнитными характеристиками, отличающимися от свойств продуктивного пласта, и это обстоятельство можно использовать в целях управления направлением бурения. Например, соседние пласты обычно бывают электропроводящими, а продуктивный пласт - нет. В настоящем изобретении предлагаются способ и устройство для управления направлением бурения в продуктивном пласте с помощью измерений электромагнитных характеристик пластов.
Раскрытие изобретения
Один аспект настоящего изобретения относится к способу управления направлением движения буровой компоновки внутри продуктивного пласта в толще горных пород, включающему размещение буровой компоновки внутри этого продуктивного пласта между верхним электропроводящим пластом, обладающим магнитным полем постоянного тока, и нижним электропроводящим пластом, обладающим магнитным полем постоянного тока, использование датчика для измерения магнитного поля в продуктивном пласте, складывающегося из магнитных полей постоянного тока верхнего и нижнего электропроводящих пластов и управление направлением движения буровой компоновки внутри продуктивного пласта с использованием результатов измерения магнитного поля.
Другой аспект настоящего изобретения относится к устройству для управления направлением движения буровой компоновки внутри продуктивного пласта в толще горных пород, содержащему датчик на буровой компоновке, выполненный с возможностью измерения магнитного поля в продуктивном пласте, складывающегося из магнитного поля постоянного тока верхнего пласта, расположенного над продуктивным пластом, и магнитного поля постоянного тока нижнего пласта, расположенного под продуктивным пластом, и процессор, выполненный с возможностью управления направлением движения буровой компоновки внутри продуктивного пласта с использованием результатов измерения магнитного поля.
Еще один аспект настоящего изобретения относится к буровой компоновке, содержащей расположенный на ней датчик, выполненный с возможностью измерения магнитного поля в продуктивном пласте, складывающегося из магнитного поля постоянного тока верхнего пласта, расположенного над продуктивным пластом, и магнитного поля постоянного тока нижнего пласта, расположенного под продуктивным пластом, один или более стабилизаторов, выполненных с возможностью изменения направления движения буровой компоновки, и процессор, выполненный с возможностью управления работой одного или более стабилизаторов с целью управления направлением движения буровой компоновки внутри продуктивного пласта с использованием результатов измерения магнитного поля.
В настоящем описании приведены примеры, в которых представлены некоторые отличительные особенности устройства и способа, подробно описываемые ниже для лучшего понимания сущности изобретения. Имеются, конечно, и другие отличительные особенности устройства и способа, представленных в настоящем описании, составляющие предмет изобретения, определяемый формулой изобретения.
Краткое описание чертежей
Для лучшего понимания изобретения к приведенному ниже подробному описанию предпочтительного варианта его осуществления приложены чертежи, на которых схожие элементы обозначены схожими ссылочными номерами. На чертежах показано:
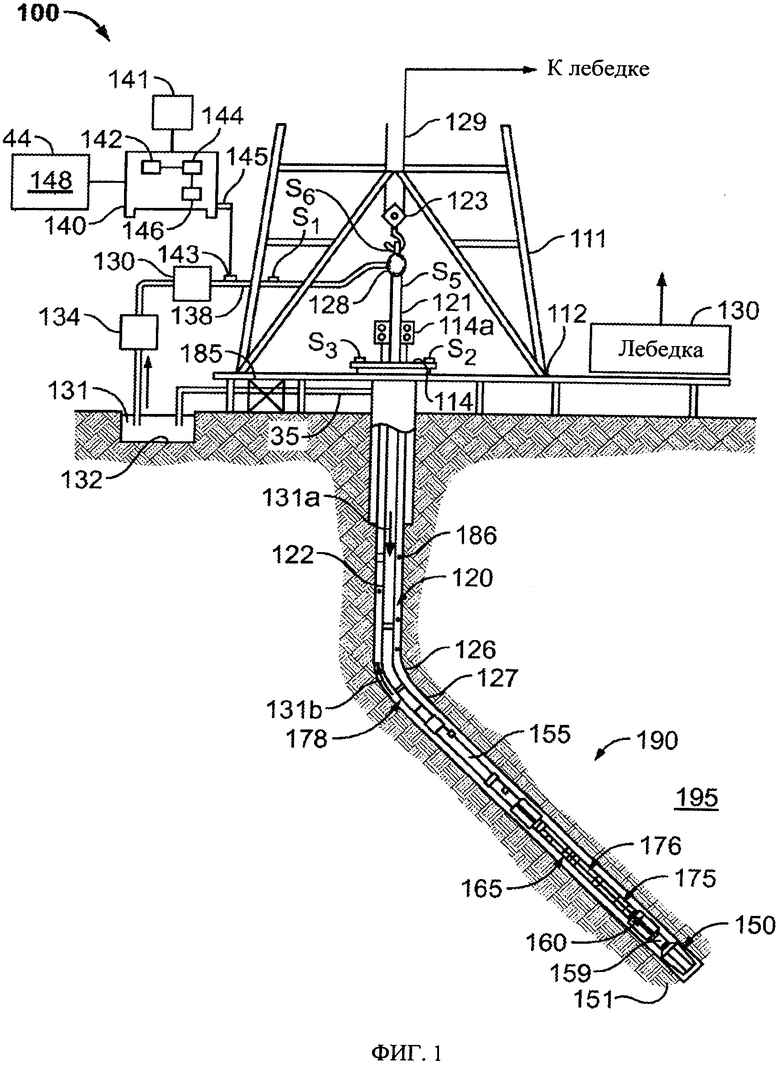
фиг.1 - схематическое примерное изображение буровой системы, подходящей для использования устройства, выполненного согласно различным вариантам осуществления настоящего изобретения и предназначенного для бурения скважин согласно способам, представленным в настоящем описании,
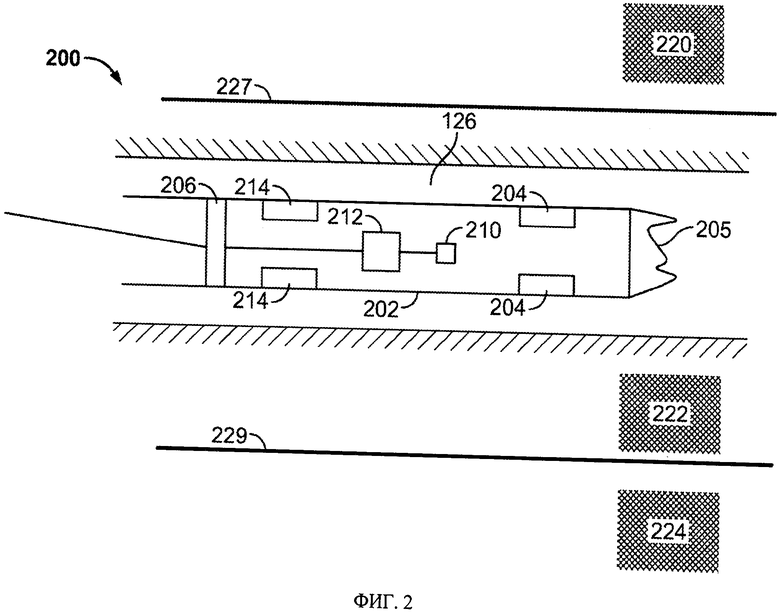
фиг.2 - пример буровой компоновки, подходящей для управления направлением бурения в продуктивном пласте с помощью способов, представленных в настоящем описании,
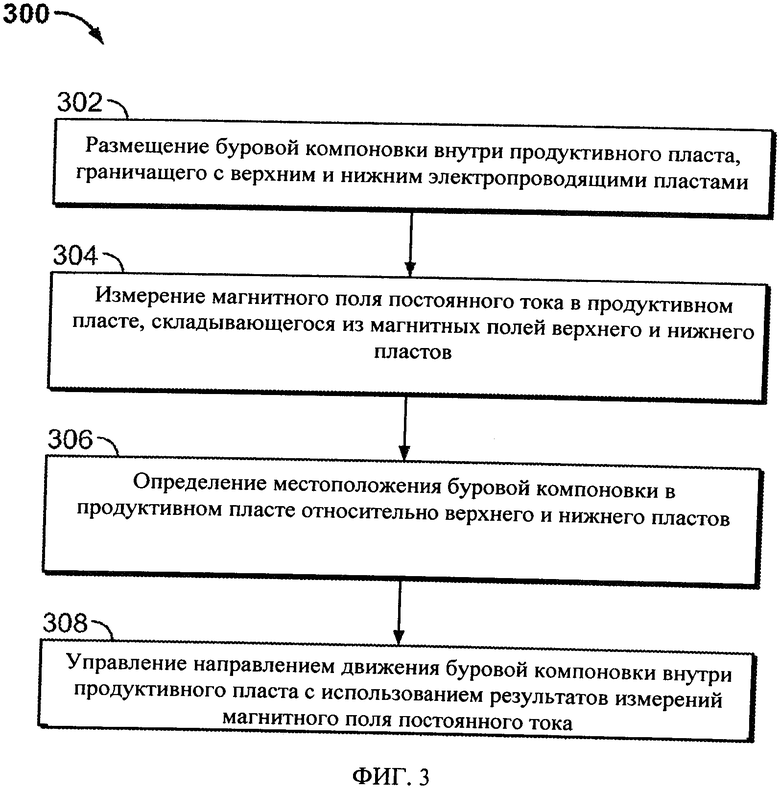
фиг.3 - блок-схема последовательности операций, представляющая пример способа управления направлением движения буровой компоновки внутри продуктивного пласта.
Подробное описание изобретения
На фиг.1 представлено схематическое примерное изображение буровой системы 100, включающей бурильную колонну с прикрепленной к ее нижнему концу буровой компоновкой, которая содержит модуль управления направлением бурения согласно одному из вариантов осуществления настоящего изобретения. Бурильная колонна 120, показанная на фиг.1, включает буровую компоновку, или компоновку низа бурильной колонны (КНБК), 190, спускаемую в скважину 126. Буровая система 100 включает стандартную вышку 111, установленную на буровой платформе или площадке 112, служащей опорой для роторного стола 114, вращаемого с требуемой скоростью первичным двигателем, таким как электрический двигатель (не показан). Лифтовая колонна 122, состоящая, например, из последовательно соединенных секций бурильных труб и имеющая на своем нижнем конце прикрепленную к нему буровую компоновку 190, простирается с поверхности до забоя 151 скважины 126. Буровое долото 150, крепящееся к буровой компоновке 190, при вращении разрушает породы пласта, в результате чего происходит пробуривание ствола скважины 126. Бурильная колонна 120 соединена с лебедкой 130 через ведущую бурильную трубу 121, вертлюг 128 и талевый канат 129 на шкиве. Лебедка 130 используется для регулирования нагрузки на долото. Для вращения бурильной колонны 120 вместо первичного двигателя и роторного стола 114 может использоваться верхний привод (не показан). Работа лебедки 130 известна специалистам в данной области и поэтому не отображена подробно в настоящем описании.
Через бурильную колонну 120 циркулирует подходящая промывочная жидкость 131 (именуемая также "буровым раствором"), подаваемая буровым насосом 134 под давлением из источника или амбара 132. Промывочная жидкость 131 проходит из бурового насоса 134 в бурильную колонну 120 через поглотитель гидравлических ударов 136 и трубопровод 138. Выход промывочной жидкости 131а из бурильных труб происходит на забое 151 скважины через отверстия в буровом долоте 150. Рециркулирующая промывочная жидкость 131b проходит вверх в направлении устья скважины через кольцевое пространство 127 между бурильной колонной 120 и стволом скважины 126 и возвращается в амбар 132 через возвратный трубопровод 135 и вибросито 185, очищающее рециркулирующую промывочную жидкость 131b от обломков выбуренной породы 186. Датчик S1 в трубопроводе 138 предоставляет информацию о расходе промывочной жидкости. Наземный датчик S2 крутящего момента и датчик S3, связанный с бурильной колонной 120, предоставляют информацию о крутящем моменте и скорости вращения бурильной колонны 120. Скорость проходки при бурении определяется для бурильной колонны 120 по датчику S5, тогда как датчик S6 регистрирует нагрузку на крюк, создаваемую бурильной колонной 120.
В некоторых буровых операциях вращение бурового долота 150 происходит в результате вращения бурильных труб 122. Тем не менее, в других буровых операциях вращение бурового долота 150 также осуществляется посредством забойного или скважинного двигателя 155, размещенного в буровой компоновке 190. Скорость проходки для данного бурового долота и КНБК в значительной степени зависит от нагрузки на долото 150 и скорости вращения последнего.
Наземный блок 140 управления получает сигналы от скважинных датчиков и приборов через датчик 143, размещенный в трубопроводе 138, а также сигналы от датчиков S1-S6 и других датчиков, используемых в системе 100, и обрабатывает эти сигналы в соответствии с командами, определяемыми заложенной в него программой. Необходимые параметры бурения и прочие данные отображаются на дисплее/мониторе 141 наземного блока 140 управления и используются оператором при управлении буровыми операциями. Наземный блок 140 управления может представлять собой систему на основе компьютера, включающую процессор 142 (например, микропроцессор), запоминающее устройство 144, например твердотельный накопитель данных, накопитель данных на магнитной ленте или жесткий диск, и одну или более компьютерных программ 146 в запоминающем устройстве 144, доступных для процессора 142, выполняющего содержащиеся в этих программах команды. Кроме того, наземный блок 140 управления может поддерживать связь с блоком 148 дистанционного управления. Наземный блок 140 управления может обрабатывать данные, относящиеся к буровым операциям, данные, получаемые от наземных датчиков и приборов, данные, поступающие из скважины, и может осуществлять управление одной или более операциями в скважине и работой наземного оборудования.
Как показано на фиг.1, бурильная колонна 120 также включает устройства 160 и 178, служащие для преобразования энергии. В одном варианте осуществления устройство 160, расположенное в КНБК 190, обеспечивает подачу электрической энергии, например, в виде электрического тока, для датчиков 165 и/или коммуникационных устройств 159. Устройство 178 преобразования энергии расположено в трубчатой части бурильной колонны 120 и обеспечивает подачу тока для датчиков, рассредоточенных по трубам. Как показано на чертеже, устройства 160 и 178 преобразуют энергию, получаемую ими от волн давления в промывочной жидкости, распространяющихся по бурильной колонне 120 и КНБК 190, выступающих в качестве приемников этих волн. Следовательно, в устройствах 160 и 178 используется активный материал для непосредственного преобразования поступивших волн давления в электрическую энергию. Как показано на чертеже, импульсы давления генерируются расположенным на поверхности модулятором, например модулятором телеметрических сигналов, и/или образуются в результате проведения буровых операций и технического обслуживания. Таким образом, устройства 160 и 178 преобразования энергии обеспечивают непосредственную и непрерывную подачу электрической энергии многочисленным потребителям в скважине без использования аккумуляторов энергии (батарей) или электрического соединения с наземным оборудованием.
Буровая компоновка 190 содержит, кроме того, датчики, предназначенные для оценки параметров пласта (именуемые также датчиками для измерений в процессе бурения или каротажа в процессе бурения) и служащие для определения удельного электрического сопротивления, плотности, пористости, проницаемости, акустических характеристик, параметров, получаемых методом ядерного магнитного резонанса, коррозионных свойств флюидов и пород в скважине, содержания солей или солевых растворов и других выбранных характеристик пласта 195, окружающего буровую компоновку 190. Эти датчики, в целом известные специалистам в данной области, для удобства обозначены в настоящем описании общим ссылочным номером 165. Кроме того, буровая компоновка включает датчик 175 удельной электропроводности для измерения удельной электропроводности пласта и магнитный датчик 176 для измерения магнитного поля постоянного тока внутри пласта. Один аспект изобретения относится к магнитным измерениям и/или измерениям удельной электропроводности, используемым для управления направлением движения буровой компоновки с помощью способов, представленных в настоящем описании. Подробное описание примера буровой компоновки 190 приведено ниже применительно к фиг.2.
Буровая компоновка 190 может, кроме того, включать ряд других датчиков и коммуникационных устройств 159, служащих для регулирования и/или определения одной или более функций и характеристик этой буровой компоновки (таких как скорость, вибрация, изгибающий момент, ускорение, колебания, закручивание, прихват-проскальзывание и т.д.), а также параметров бурения, таких как нагрузка на долото, расход промывочной жидкости, давление, температура, скорость проходки, азимут, положение отклонителя, вращение бурового долота и т.д.
На фиг.2 показан пример буровой компоновки 202 бурильной колонны 200 для бурения скважины 126 в продуктивном пласте 222, направлением движения которой в продуктивном пласте можно управлять с помощью способов, представленных в настоящем описании. Буровая компоновка 202 находится в продуктивном пласте 222, который в целом представляет собой нефтеносный пласт, не являющийся электропроводящим. Сверху продуктивный пласт 222 граничит с верхним пластом 220, а снизу - с нижним пластом 224. Верхний пласт 220 и нижний пласт 224 являются, как правило, электропроводящими, причем знак удельной электропроводности одного из пластов противоположен знаку удельной электропроводности другого пласта. Первая граница раздела 227 представляет собой границу между верхним пластом 220 и продуктивным пластом 222, а вторая граница раздела 229 - границу между продуктивным пластом 222 и нижним пластом 224. Верхний пласт 220 и нижний пласт 224 обладают магнитными полями постоянного тока, которые ассоциируются с ними и ориентированы параллельно соответственно первой 227 и второй 229 границам раздела. Знаки магнитных полей постоянного тока в верхнем и нижнем пластах противоположны друг другу.
В приведенном примере буровая компоновка 202 включает буровое долото 205, предназначенное для пробуривания продуктивного пласта 222, и стабилизаторы 204, которые могут отклоняться на шарнирах от буровой компоновки 202, изменяя направление движения буровой компоновки 202 в процессе бурения. Кроме этого, буровая компоновка 202 включает один или более магнитных датчиков 210 для проведения магнитных измерений. Один или более датчиков 210 соединен(-ы) с процессором 212, определяющим необходимые команды на изменение направления бурения в зависимости от полученных результатов магнитных измерений. В свою очередь, процессор 212 соединен со стабилизаторами 204, которым он выдает эти команды, управляя ими и оказывая влияние на направление движения буровой компоновки 202. Буровая компоновка 202 также включает один или более датчиков 214 удельной электропроводности для измерения удельной электропроводности пласта. Датчики 214 удельной электропроводности соединены с процессором 212 и обеспечивают измерения удельной электропроводности, которые в одном из вариантов осуществления изобретения могут быть использованы вместе с магнитными измерениями для управления направлением движения буровой компоновки 202. Система 206 телеметрии расположена на КНБК 202 и обеспечивает получение данных для наземного оборудования. В одном из альтернативных вариантов осуществления процессор располагается на поверхности и получает данные измерений от одного или более магнитных датчиков 210 и/или датчиков 214 удельной электропроводности, посылая стабилизаторам 204 через блок 206 телеметрии команды, обеспечивающие управление направлением бурения.
В одном варианте осуществления управление направлением движения буровой компоновки 202 внутри продуктивного пласта 222 осуществляется путем измерения магнитного поля у буровой компоновки 202, складывающегося из магнитных полей постоянного тока верхнего пласта 220 и нижнего пласта 224. Управление направлением бурения в продуктивном пласте 222 основано на двух особенностях магнитных полей постоянного тока верхнего пласта 220 и нижнего пласта 224. Первая особенность состоит в том, что магнитное поле постоянного тока на границе раздела ориентировано параллельно этой границе. Вторая особенность состоит в том, что магнитные поля постоянного тока на границах раздела 227 и 229 имеют противоположные знаки. Следовательно, если верхнее и нижнее полупространства имеют одинаковую удельную электропроводность, то магнитное поле в центральной точке продуктивного пласта между границами раздела 227 и 229 будет равно нулю. Кроме того, измерения магнитного поля дают разные знаки при приближении буровой компоновки 202 к верхнему пласту 220 и к нижнему пласту 224. Эти две особенности описаны ниже после краткого рассмотрения теоретических вопросов, относящихся к магнитному полю постоянного тока на единственной границе раздела.
На единственной границе раздела магнитное поле 


где 

где поверхность Sc включает всю границу раздела, 




где 

где σ+ и σ- значения удельной электропроводности на противоположных сторонах границы раздела. Уравнение (4) показывает, что влияние поверхности на магнитное поле постоянного тока зависит только от тангенциальных составляющих электрического поля на границах раздела.
Возвращаясь к двум особенностям магнитного поля постоянного тока, упомянутым выше, отметим, что первая особенность (параллельность магнитного поля постоянного тока границе раздела) вытекает из полученного уравнения, поскольку вектор, определяемый векторным произведением 

где 






Для случая σ1=σ2 уравнение (5) имеет вид:

Из уравнения (6) следует, что два интегральных члена уравнения (7) имеют противоположные знаки. При этом в центральной точке 
В силу вышесказанного, в одном аспекте изобретения можно определить в продуктивном пласте точку между верхним и нижним пластами, в которой измеренное магнитное поле постоянного тока будет, по существу, равно нулю. В частном случае, когда значения удельной электропроводности верхнего и нижнего пластов равны друг другу и имеют противоположные знаки, эта определенная точка представляет собой центральную точку между этими двумя пластами. В другом аспекте величину и знак измеренного магнитного поля можно использовать для определения расстояния между точкой измерения и нулевой точкой и, следовательно, расстояния между точкой измерения и одним из электропроводящих пластов (верхним или нижним). Еще в одном аспекте можно использовать магнитные поля для управления направлением движения бурильной колонны внутри продуктивного пласта. По мере приближения бурильной колонны к одной из границ раздела, например к верхнему пласту 220, магнитное поле возрастает в одном направлении, например в области положительных значений. По мере же приближения бурильной колонны к другой границе раздела, например к нижнему пласту 224, магнитное поле возрастает в области отрицательных значений. Следовательно, величину и знак измеренных магнитных полей можно использовать для управления направлением бурения. Пример способа управления направлением движения буровой компоновки внутри продуктивного пласта описан ниже применительно к фиг.3.
На фиг.3 показана блок-схема последовательности операций, представляющая пример способа управления направлением движения буровой компоновки 202 внутри продуктивного пласта. На этапе 302 оператор располагает/позиционирует буровую компоновку внутри продуктивного пласта 222, граничащего с верхним и нижним электропроводящими пластами (соответственно 220 и 224). На этапе 304 с помощью одного или более датчиков на буровой компоновке осуществляется измерение магнитного поля, складывающегося из магнитных полей постоянного тока верхнего и нижнего пластов 220 и 224. На этапе 306 определяется местоположение буровой компоновки относительно верхнего и нижнего пластов, а на этапе 308 осуществляется управление направлением движения этой буровой компоновки внутри продуктивного пласта с использованием результатов измерений магнитных полей.
В одном варианте осуществления изобретения выполняется калибровка датчиков с целью устранения влияния магнитных полей буровой компоновки на результаты магнитных измерений. Как правило, различные компоненты буровой компоновки создают магнитные поля либо со специальной целью, либо вследствие образования токов при работе буровой компоновки и ее внедрении в окружающий пласт. Влияние этих полей можно устранить с помощью известных методов калибровки, например путем отдельного проведения измерений магнитных полей до начала буровых операций.
В другом варианте осуществления определяют значения удельной электропроводности верхнего слоя 220 и нижнего слоя 224, выполнив независимые измерения (электрические или магнитные), например, посредством электрического датчика или магнитного датчика. Эти значения удельной электропроводности могут быть получены до использования способов управления направлением бурения, представленных в настоящем описании. Например, удельную электропроводность верхнего слоя 220 можно определить в процессе бурения, но до проникновения буровой компоновки в продуктивный пласт 222. Значения удельной электропроводности также можно использовать для определения местоположения буровой компоновки внутри продуктивного пласта и, следовательно, для управления направлением ее движения.
Для получения скорректированных результатов измерений, по существу, в режиме реального времени можно использовать с целью обработки данных скважинный процессор. Безусловным фактором при управлении данными и их обработке является использование компьютерной программы на подходящем машиночитаемом носителе, что позволяет процессору выполнять указанные функции. Машиночитаемые носители могут включать постоянные запоминающие устройства (ПЗУ), стираемые программируемые ПЗУ (СППЗУ), электрически стираемые программируемые ПЗУ (ЭСППЗУ), флеш-память и оптические диски.
Несмотря на то, что приведенное выше описание сфокусировано на предпочтительных вариантах осуществления изобретения, специалистам в данной области будет очевидна возможность внесения различных изменений. Подразумевается, что все эти изменения, охватываемые настоящим изобретением, находятся в пределах его объема и сущности, определяемых приложенной формулой изобретения.
Таким образом, один аспект настоящего изобретения относится к способу управления направлением движения буровой компоновки внутри продуктивного пласта в толще горных пород, включающему размещение буровой компоновки внутри этого продуктивного пласта между верхним электропроводящим пластом, обладающим магнитным полем постоянного тока, и нижним электропроводящим пластом, обладающим магнитным полем постоянного тока, использование датчика для измерения магнитного поля в продуктивном пласте, складывающегося из магнитных полей постоянного тока верхнего и нижнего электропроводящих пластов и управление направлением движения буровой компоновки внутри продуктивного пласта с использованием результатов измерения магнитного поля. Можно определить в продуктивном пласте точку, в которой измеренное магнитное поле будет по существу равно нулю. С помощью измерений магнитного поля можно также определить расстояние от буровой компоновки до одного из верхнего и нижнего пластов. В одном варианте осуществления можно определить удельную электропроводность верхнего и нижнего электропроводящих пластов с помощью по меньшей мере одного электрического измерения или магнитного измерения. Из результатов измерений удельной электропроводности верхнего и нижнего электропроводящих пластов можно определить местоположение буровой компоновки в продуктивном пласте. Можно выполнить калибровку средств измерения магнитных полей с целью устранения влияния магнитного поля буровой компоновки на результаты магнитных измерений.
Другой аспект настоящего изобретения относится к устройству для управления направлением движения буровой компоновки внутри продуктивного пласта в толще горных пород, содержащему датчик на буровой компоновке, выполненный с возможностью измерения магнитного поля в продуктивном пласте, складывающегося из магнитного поля постоянного тока верхнего пласта, расположенного над продуктивным пластом, и магнитного поля постоянного тока нижнего пласта, расположенного под продуктивным пластом, и процессор, выполненный с возможностью управления направлением движения буровой компоновки внутри продуктивного пласта с использованием результатов измерения магнитного поля. В одном варианте осуществления процессор выполнен с возможностью определения в продуктивном пласте точки, в которой измеренное магнитное поле постоянного тока будет по существу равно нулю. В другом варианте осуществления процессор выполнен с возможностью определения расстояния от буровой компоновки до одного из верхнего и нижнего пластов с помощью измерений магнитного поля. Устройство может также включать датчик(-и) (электрический и/или магнитный), выполненный(-е) с возможностью определения удельной электропроводности верхнего и нижнего электропроводящих пластов. Процессор может быть выполнен с возможностью определения местоположения буровой компоновки в продуктивном пласте из результатов измерений удельной электропроводности верхнего и нижнего электропроводящих пластов. Кроме того, процессор может быть выполнен с возможностью калибровки средств измерения магнитных полей с целью устранения влияния магнитного поля буровой компоновки на результаты магнитных измерений.
Еще один аспект настоящего изобретения относится к буровой компоновке, содержащей расположенный на ней датчик, выполненный с возможностью измерения магнитного поля в продуктивном пласте, складывающегося из магнитного поля постоянного тока верхнего пласта, расположенного над продуктивным пластом, и магнитного поля постоянного тока нижнего пласта, расположенного под продуктивным пластом, один или более стабилизаторов, выполненных с возможностью изменения направления движения буровой компоновки, и процессор, выполненный с возможностью управления работой одного или более стабилизаторов с целью управления направлением движения буровой компоновки внутри продуктивного пласта с использованием результатов измерения магнитного поля. В одном варианте осуществления процессор выполнен с возможностью определения в продуктивном пласте точки, в которой измеренное магнитное поле постоянного тока будет, по существу, равно нулю. В другом варианте осуществления процессор выполнен с возможностью определения расстояния от буровой компоновки до одного из верхнего и нижнего пластов с помощью измерений магнитного поля. Устройство может также включать датчик, выполненный с возможностью определения удельной электропроводности верхнего и нижнего электропроводящих пластов. Процессор может быть выполнен с возможностью определения местоположения буровой компоновки в продуктивном пласте из результатов измерений удельной электропроводности верхнего и нижнего электропроводящих пластов. Кроме того, процессор может быть выполнен с возможностью калибровки средств измерения магнитных полей с целью устранения влияния магнитного поля буровой компоновки на получаемые результаты измерений.
Несмотря на то, что приведенное выше описание сфокусировано на предпочтительных вариантах осуществления изобретения, специалистам в данной области будет очевидна возможность внесения различных изменений. Подразумевается, что все эти изменения, охватываемые настоящим изобретением, находятся в пределах его объема и сущности, определяемых приложенной формулой изобретения.
Изобретение относится к направленному бурению скважин. Техническим результатом является повышение точности проводки ствола скважины в пределах продуктивного пласта. Предложен способ управления направлением движения буровой компоновки внутри продуктивного пласта, включающий размещение буровой компоновки внутри продуктивного пласта между верхним электропроводящим пластом, обладающим магнитным полем постоянного тока, и нижним электропроводящим пластом, обладающим магнитным полем постоянного тока; использование датчика для измерения магнитного поля в продуктивном пласте, складывающегося из магнитного поля постоянного тока верхнего электропроводящего пласта и магнитного поля постоянного тока нижнего электропроводящего пласта; и управление направлением движения буровой компоновки внутри продуктивного пласта с использованием результатов измерения магнитного поля. Предложены также устройство и буровая компоновка для реализации указанного способа. 3 н. и 17 з.п. ф-лы, 3 ил.
1. Способ управления направлением движения буровой компоновки внутри продуктивного пласта в толще горных пород, включающий:
размещение буровой компоновки внутри продуктивного пласта между верхним электропроводящим пластом, обладающим магнитным полем постоянного тока, и нижним электропроводящим пластом, обладающим магнитным полем постоянного тока;
использование датчика для измерения магнитного поля в продуктивном пласте, складывающегося из магнитного поля постоянного тока верхнего электропроводящего пласта и магнитного поля постоянного тока нижнего электропроводящего пласта; и
управление направлением движения буровой компоновки внутри продуктивного пласта с использованием результатов измерения магнитного поля.
2. Способ по п.1, включающий определение в продуктивном пласте точки, в которой измеренное магнитное поле, по существу, равно нулю.
3. Способ по п.1, включающий определение расстояния от буровой компоновки до одного из верхнего и нижнего пластов с помощью измерений магнитного поля.
4. Способ по п.1, включающий определение удельной электропроводности верхнего и нижнего электропроводящих пластов.
5. Способ по п.4, включающий определение удельной электропроводности с помощью электрического измерения или магнитного измерения.
6. Способ по п.4, включающий определение местоположения буровой компоновки в продуктивном пласте из результатов измерений удельной электропроводности верхнего и нижнего электропроводящих пластов.
7. Способ по п.1, включающий калибровку средств измерения магнитных полей для устранения влияния магнитного поля буровой компоновки на результаты измерений магнитного поля.
8. Устройство для управления направлением движения буровой компоновки внутри продуктивного пласта в толще горных пород, содержащее:
датчик на буровой компоновке, выполненный с возможностью измерения магнитного поля в продуктивном пласте, складывающегося из магнитного поля постоянного тока верхнего пласта, расположенного над продуктивным пластом, и магнитного поля постоянного тока нижнего пласта, расположенного под продуктивным пластом; и
процессор, выполненный с возможностью управления направлением движения буровой компоновки внутри продуктивного пласта с использованием результатов измерения магнитного поля.
9. Устройство по п.8, в котором процессор выполнен с возможностью определения в продуктивном пласте точки, где измеренное магнитное поле, по существу, равно нулю.
10. Устройство по п.9, в котором процессор выполнен с возможностью определения расстояния от буровой компоновки до одного из верхнего и нижнего пластов с помощью измерений магнитного поля.
11. Устройство по п.9, содержащее датчик, выполненный с возможностью определения удельной электропроводности верхнего и нижнего электропроводящих пластов.
12. Устройство по п.11, в котором датчик представляет собой электрический датчик или магнитный датчик.
13. Устройство по п.11, в котором процессор выполнен с возможностью определения местоположения буровой компоновки в продуктивном пласте по результатам измерений удельной электропроводности верхнего и нижнего электропроводящих пластов.
14. Устройство по п.9, в котором процессор выполнен с возможностью калибровки средств измерения магнитных полей для устранения влияния магнитного поля буровой компоновки на результаты измерений магнитного поля.
15. Буровая компоновка, содержащая:
расположенный на ней датчик, выполненный с возможностью измерения магнитного поля в продуктивном пласте, складывающегося из магнитного поля постоянного тока верхнего пласта, расположенного над продуктивным пластом, и магнитного поля постоянного тока нижнего пласта, расположенного под продуктивным пластом;
один или более стабилизаторов, выполненных с возможностью изменения направления движения буровой компоновки; и
процессор, выполненный с возможностью управления работой одного или более стабилизаторов для направления движения буровой компоновки внутри продуктивного пласта с использованием результатов измерения магнитного поля.
16. Буровая компоновка по п.15, в которой процессор выполнен с возможностью определения в продуктивном пласте точки, где измеренное магнитное поле, по существу, равно нулю.
17. Буровая компоновка по п.15, в которой процессор выполнен с возможностью определения расстояния от буровой компоновки до одного из верхнего и нижнего пластов с помощью измерений магнитного поля.
18. Буровая компоновка по п.15, содержащая датчик, выполненный с возможностью определения удельной электропроводности верхнего и нижнего электропроводящих пластов.
19. Буровая компоновка по п.18, в которой процессор выполнен с возможностью определения местоположения буровой компоновки в продуктивном пласте по результатам измерений удельной электропроводности верхнего и нижнего электропроводящих пластов.
20. Буровая компоновка по п.15, в которой процессор выполнен с возможностью калибровки средств измерения магнитного поля для устранения влияния магнитного поля буровой компоновки на результаты измерений магнитного поля.
| US 20060157277 A1, 20.07.2006 | |||
| RU 2008136343 A, 20.03.2010 | |||
| US 8011425 B2, 06.09.2011 | |||
| US 20070126426 A1, 07.06.2007 | |||
| US 4849692 A1, 18.07.1989 | |||
| US 20070256832 A1, 08.11.2007 | |||
| US 20080041626 A1, 21.02.2008. |

