Изобретение относится к направленному бурению нефтяных и газовых скважин.
Известен способ и устройство для управления направлением бурения в продуктивном пласте с использованием магнитного поля постоянного тока [патент РФ №2572875 от 20.01.2016]. Способ управления направлением движения буровой компоновки внутри продуктивного пласта включает размещение буровой компоновки внутри продуктивного пласта между верхним электропроводящим пластом, обладающим магнитным полем постоянного тока, и нижним электропроводящим пластом, обладающим магнитным полем постоянного тока; использование датчика для измерения магнитного поля в продуктивном пласте, складывающегося из магнитного поля постоянного тока верхнего электропроводящего пласта и магнитного поля постоянного тока нижнего электропроводящего пласта; и управление направлением движения буровой компоновки внутри продуктивного пласта с использованием результатов измерения магнитного поля.
К недостаткам известного способа относится то, что он позволяет проводить ориентирование бурильного инструмента в мощном однородном пласте, тогда как использование его в слоисто-неоднородных пластах затруднительно.
Известен способ геонавигации бурильного инструмента и управления его траекторией при проводке скважин в нужном направлении [патент РФ №2613364 от 16.03.2017]. Способ включает контроль за положением бурильного инструмента в межскважинном пространстве (МСП) при проходке скважин с помощью координатной системы измерения в процессе бурения - MWD, при этом одновременно применяют метод зондирования становлением электрического поля в ближней зоне - ЭЗС-Б для вычисления кажущегося удельного электрического сопротивления горной породы для определения координат и границы целика нефти, занимающего неопределенное положение в МСП, при этом обеспечивают контроль в режиме реального времени за положением бурильного инструмента в МСП при проходке скважины, бурящейся в сторону указанного целика нефти, с учетом координат и границ расположения указанного целика нефти в МСП, определяемого методом ЭЗС-Б, и в процессе производимого контроля вносят в координатную систему MWD для ориентации бурильного инструмента в МСП поправки, обеспечивающие изменение направления в ориентации бурильного инструмента в сторону расположения указанного целика нефти.
К недостаткам известного способа относится, то, что при выборе траектории скважины не учитывается угол вскрытия пласта скважиной, что в дальнейшем сказывается на эффективности выработки остаточных запасов нефти.
Известен способ и система бурения с автоматическим уточнением точек маршрута или трассы ствола скважины на основании корректировки данных инклинометрии [патент РФ №2657033 от 08.06.2018]. Способ бурения включает сбор данных инклинометрии на буровой площадке и определение точки маршрута или трассы ствола скважины на основании данных инклинометрии. Способ бурения также включает пересылку данных инклинометрии в центр удаленного контроля, который вносит коррективы в данные инклинометрии. Способ бурения также включает получение откорректированных данных инклинометрии и автоматическую корректировку точки маршрута или трассы ствола скважины на основании откорректированных данных инклинометрии.
К недостаткам известного способа, относится то, что в процессе корректировки траектории скважины учитываются только данные об инклинометрии и не учитывается геологическое строение горного массива, а именно информация об углах наклона пластов и их толщинах.
Наиболее близким способом того же назначения к заявленному способу по совокупности признаков является способ направления бурения буровой скважины в целевом подземном пласте, включающий этапы подготовки бурового оборудования, имеющего компоновку низа бурильной колонны, которая включает в себя управляемую подсистему наклонно-направленного бурения и направленный измерительный прибор каротажа во время бурения с возможностью кругового просмотра и упреждающего просмотра; определения наличия заданного типа особенности пласта в целевом пласте; и навигации траектории бурения в целевом пласте буровым оборудованием, включающей в себя прием сигналов измерений с направленного измерительного прибора, получение на основании принимаемых сигналов измерений показателей параметров пласта относительно особенности пласта в целевом пласте и управление подсистемой наклонно-направленного бурения для бурения в направлении, определяемом в зависимости от получаемых показателей параметров пласта. [патент РФ №2542026 от 20.02.2015]. Данный способ принят за прототип.
Признаки прототипа, являющиеся общими с заявляемым способом, - способ роторного бурения скважин модульной управляемой системой малого диаметра, при котором предварительно проводят исследования условий залегания горных пород при помощи сейсмических исследований, бурят скважину или боковой ствол с наклонным пространственно-ориентированным профилем в продуктивном пласте с применением модульной системы роторного бурения, включающей модуль телеметрии и модуль каротажа, в процессе бурения одновременно контролируют положение траектории скважины измерением зенитного угла бурения скважины и проводят геофизические исследования в скважине, по данным исследований корректируют траекторию скважины.
К недостаткам известного способа, принятого за прототип, относится то, что в процессе корректировки траектории скважины не учитываются данные об углах наклона вскрываемых пластов и их толщинах.
Задача, на решение которой направлено заявляемое изобретение, - повышение точности бурения наклонно-ориентированных скважин.
Поставленная задача была решена за счет того, что в известном способе роторного бурения скважин модульной управляемой системой малого диаметра, при котором предварительно проводят исследования условий залегания горных пород при помощи сейсмических исследований, бурят скважину или боковой ствол с наклонным пространственно-ориентированным профилем в продуктивном пласте с применением модульной системы роторного бурения, включающей модуль телеметрии и модуль каротажа, в процессе бурения одновременно контролируют положение траектории скважины измерением зенитного угла бурения скважины и проводят геофизические исследования в скважине, по данным исследований корректируют траекторию скважины, согласно изобретению по данным геофизических исследований в процессе бурения определяют угол напластования горных пород в режиме реального времени, по значениям угла напластования и зенитного угла вычисляют угол вскрытия пласта, затем сравнивают вычисленный угол вскрытия с проектным углом вскрытия пласта, полученным в ходе предварительных исследований условий залегания горных пород, в случае отклонения его от проектного производят корректировку зенитного угла бурения скважины с учетом угла напластования горных пород в зависимости от геологического строения горного массива.
Признаки заявляемого технического решения, отличительные от прототипа: определяют угол напластования горных пород в режиме реального времени по данным геофизических исследований в процессе бурения; вычисляют угол вскрытия пласта по значениям угла напластования и зенитного угла; сравнивают вычисленный угол вскрытия с проектным углом вскрытия пласта, полученным в ходе предварительных исследований условий залегания горных пород; в случае отклонения его от проектного производят корректировку зенитного угла бурения скважины с учетом угла напластования горных пород в зависимости от геологического строения горного массива.
Благодаря новым признакам заявляемый способ роторного бурения скважин позволяет проводить оперативную корректировку направления бурения с учетом данных об углах наклона вскрываемых пластов. Отличительные признаки в совокупности с известными позволят повысить точность бурения наклонно-ориентированных скважин.
Заявителю неизвестно использование в науке и технике отличительных признаков способа роторного бурения скважин с получением указанного технического результата.
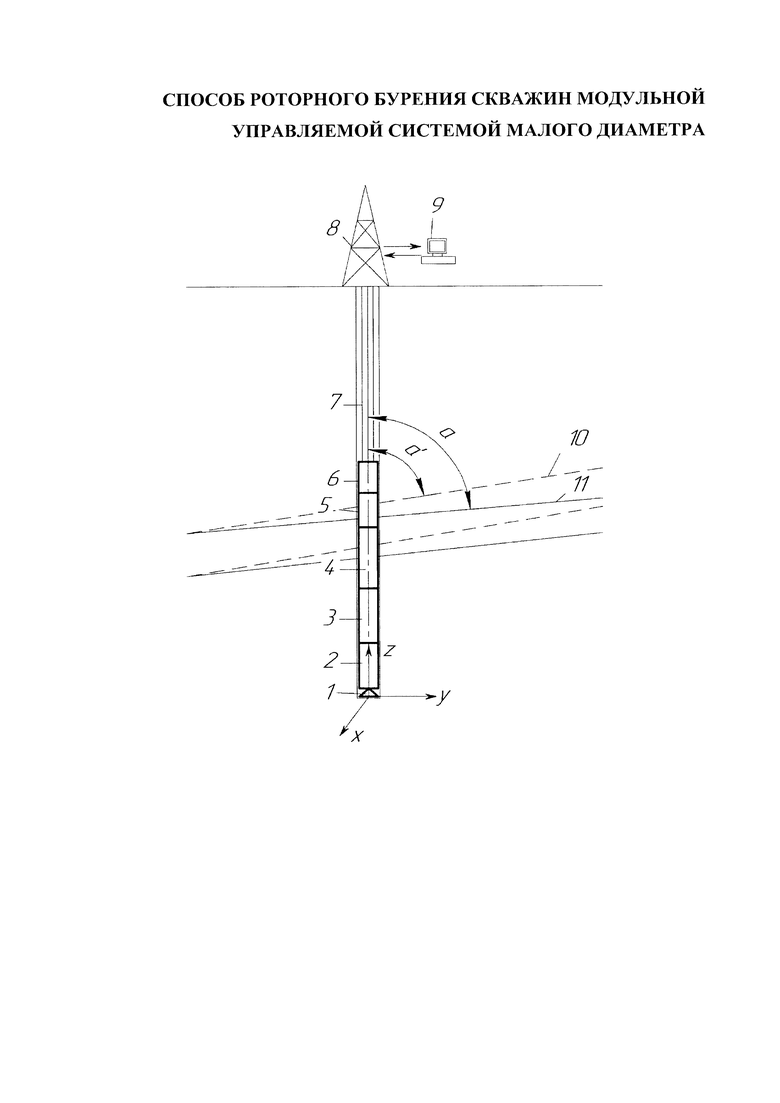
На чертеже представлена схема устройства для осуществления предложенного способа. На схеме показаны:
1- долото;
2- модуль отклонения;
3 - модуль телеметрии;
4 - модуль каротажа;
5 - генератор;
6 - пульсатор с датчиком давления;
7 - бурильная колонна;
8 - буровая вышка;
9 - пульт управления;
10 - плоскость фактического залегания пласта в точке вскрытия;
11 - плоскость залегания пласта по проекту в точке вскрытия;
α - угол вскрытия пласта скважины по проекту;
α' - фактический угол вскрытия пласта скважины;
х, у, z - координаты местоположения долота.
Способ роторного бурения скважин модульной управляемой системой малого диаметра осуществляют следующим образом.
Предварительно проводят исследования условий залегания горных пород при помощи сейсмических исследований. Определяют углы напластования и состав горных пород, слагающих горный массив. Проектируют скважину с определением траектории и углов вскрытия пластов.
После бурения и крепления верхних интервалов (направление, кондуктор и техническая колонна) или после зарезки окна в обсадной колонне (в случае бурения бокового ствола) в скважину на колонне бурильных труб 7 спускают долото 1 и модульную управляемую систему роторного бурения диаметром 120 мм.
Бурение скважины осуществляется по заданной траектории с применением долота 1, модульной управляемой системы роторного бурения, буровой вышки 8 и пульта управления 9.
Модульная управляемая система роторного бурения включает в себя модули отклонения 2, телеметрии 3, каротажа 4, генератор 5 и пульсатор с датчиком давления 6, соединенные посредством унифицированных переходников.
Контроль за траекторией ствола скважины, обработку данных, контроль за подземной аппаратурой осуществляют при помощи модуля телеметрии 3. В качестве модуля телеметрии 3 может быть использована система, описанная в патенте РФ №2646287 от 22.03.2018. Применение модуля телеметрии 3 повышает точность определения расположения скважины при входе в пласт, что обеспечивается низкими величинами ошибки определения зенитного и азимутального угла.
Отклонение долота 1 обеспечивается использованием модуля отклонения 2. В качестве модуля отклонения 2 может быть использован блок отклонения системы буровым устройством, описанный в патенте РФ №2655325 от 25.05.2018. Использование модуля отклонения 2 системы управления буровым устройством обеспечивает точность и плавность искривления профиля скважины, соответствие ее диаметра номинальному, что, как показывает практика, в совокупности обеспечивает высокое качество заканчивания скважин и эффективность ее дальнейшей эксплуатации.
Модуль каротажа 4 позволяет проводить геофизические исследования в процессе бурения скважины. В перечень определяемых параметров входят: плотность горных пород, пористость, удельное электрическое сопротивление и угол напластования горных пород. Последний параметр позволяет производить корректировку траектории скважины и актуализировать информацию о геологическом строении залежи. Информация, получаемая при помощи модуля 4, передается на обработку в модуль 3. Передача информации от модуля 3 на пульт управления 9, расположенный на устье и обратно происходит посредством гидравлических импульсов давления, что обеспечивается наличием пульсатора и датчика давления 6 (фиг.). На устье в системе циркуляции после буровых насосов установлен датчик, регистрирующий изменение давления в системе, данные с датчика передаются на пульт управления 9. Пульт управления 9 посредством контролирования работы буровых насосов подает обратный сигнал к забойной аппаратуре, сигнал принимается датчиком давления 6, и обрабатывается платой управления, расположенной в модуле 3. После обработки полученного сигнала от модуля телеметрии 3 на модуль отклонения 2 передается команда об изменении траектории бурения, далее осуществляется обратная связь об успешном выполнении команды.
Питание подземного оборудования осуществляется за счет энергоблока, включающего в себя аккумуляторные батареи (входят в состав модуля 3) и генератор 5. Наличие генератора 5 позволяет вырабатывать электроэнергию для питания модуля отклонения 2, модуля телеметрии 3, модуля каротажа 4 и подзарядки аккумуляторных батарей в процессе бурения при циркуляции буровой жидкости. Аккумуляторные батареи обеспечивают работу глубинного оборудования без циркуляции жидкости, например, при выполнении спускоподъемных операций.
При бурении скважины осуществляют вращение бурильной колонны 6 при помощи ротора и ведущей трубы или системы верхнего привода с одновременной циркуляцией бурового раствора. В процессе бурения при помощи модуля телеметрии 3 контролируют положение траектории скважины (х, у, z) и зенитный угол бурения скважины, а при помощи модуля каротажа 4 одновременно производят геофизические исследования в скважине - определяют свойства горных пород и углы их напластования. Данные передаются с забоя на пульт управления 9, расположенный на поверхности.
Затем по значениям угла напластования и зенитного угла вычисляют угол вскрытия пласта, сравнивают вычисленный угол вскрытия с проектным углом вскрытия пласта, полученным в ходе предварительных исследований условий залегания горных пород. В случае отклонения фактического угла вскрытия от проектного α производят корректировку зенитного угла бурения скважины с учетом определенного угла напластования горных пород в зависимости от геологического строения горного массива. Для этого отправляют команду от пульта управления 9 на модуль отклонения 2 через модуль телеметрии 3. Таким образом, в процессе бурения постоянно происходит сопоставление данных о пространственном положении бурильного инструмента и траектории вскрытия горных пород, что обеспечивает высокую точность проводки скважин и актуализацию информации о геологическом строении залежи.
Преимущество изобретения состоит в том, что одновременный каротаж с определением условий напластования и контроль траектории позволяет повысить точность проводки скважины и вскрытия продуктивного пласта.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ бурения горизонтальной скважины | 2023 |
|
RU2806206C1 |
| СПОСОБ И СИСТЕМА КОМБИНИРОВАННОГО СОПРОВОЖДЕНИЯ ПРОЦЕССА БУРЕНИЯ СКВАЖИНЫ | 2018 |
|
RU2687668C1 |
| СПОСОБ БУРЕНИЯ ГОРИЗОНТАЛЬНОЙ СКВАЖИНЫ С ПИЛОТНЫМ СТВОЛОМ | 2015 |
|
RU2587660C1 |
| СПОСОБ ПРОВОДКИ СТВОЛА ГОРИЗОНТАЛЬНОЙ СКВАЖИНЫ НА ОСНОВЕ ГЕОЛОГИЧЕСКИХ ИССЛЕДОВАНИЙ | 2006 |
|
RU2313668C1 |
| СПОСОБ СТРОИТЕЛЬСТВА СКВАЖИНЫ | 2012 |
|
RU2494214C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО ПРОЦЕССА ГЕОЛОГИЧЕСКОЙ ПРОВОДКИ СКВАЖИН И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2720115C1 |
| Способ управления бурением скважин с автоматизированной системой оперативного управления бурением скважин | 2018 |
|
RU2701271C1 |
| СПОСОБ ГЕОНАВИГАЦИИ ГОРИЗОНТАЛЬНЫХ СКВАЖИН | 2001 |
|
RU2230343C2 |
| Способ бурения бокового ствола скважины с неустойчивыми породами | 2023 |
|
RU2798542C1 |
| Способ бурения горизонтальной скважины | 2023 |
|
RU2803985C1 |
Изобретение относится к направленному бурению нефтяных и газовых скважин. Способ роторного бурения скважин модульной управляемой системой малого диаметра включает бурение скважины или бокового ствола с наклонным пространственно-ориентированным профилем в продуктивном пласте с применением модульной системы роторного бурения, включающей модуль телеметрии и модуль каротажа. Предварительно проводят исследования условий залегания горных пород при помощи сейсмических исследований. В процессе бурения одновременно контролируют положение траектории скважины и производят геофизические исследования в скважине. По данным геофизических исследований определяют угол напластования горных пород в режиме реального времени. По данным телеметрии определяют зенитный угол бурения скважины. Затем по значениям угла напластования и зенитного угла вычисляют угол вскрытия пласта, сравнивают вычисленный угол вскрытия с проектным углом вскрытия пласта, полученным в ходе предварительных исследований условий залегания горных пород. В случае отклонения его от проектного производят корректировку зенитного угла бурения скважины с учетом угла напластования горных пород в зависимости от геологического строения горного массива. Техническим результатом является повышение точности бурения наклонно-ориентированных скважин. 1 ил.
Способ роторного бурения скважин модульной управляемой системой малого диаметра, при котором предварительно проводят исследования условий залегания горных пород при помощи сейсмических исследований, бурят скважину или боковой ствол с наклонным пространственно-ориентированным профилем в продуктивном пласте с применением модульной системы роторного бурения, включающей модуль телеметрии и модуль каротажа, в процессе бурения одновременно контролируют положение траектории скважины измерением зенитного угла бурения скважины и проводят геофизические исследования в скважине, по данным исследований корректируют траекторию скважины, отличающийся тем, что по данным геофизических исследований в процессе бурения определяют угол напластования горных пород в режиме реального времени, по значениям угла напластования и зенитного угла вычисляют угол вскрытия пласта, затем сравнивают вычисленный угол вскрытия с проектным углом вскрытия пласта, полученным в ходе предварительных исследований условий залегания горных пород, в случае отклонения его от проектного производят корректировку зенитного угла бурения скважины с учетом угла напластования горных пород в зависимости от геологического строения горного массива.
| СПОСОБЫ ОПРЕДЕЛЕНИЯ ОСОБЕННОСТЕЙ ПЛАСТОВ, ОСУЩЕСТВЛЕНИЯ НАВИГАЦИИ ТРАЕКТОРИЙ БУРЕНИЯ И РАЗМЕЩЕНИЯ СКВАЖИН ПРИМЕНИТЕЛЬНО К ПОДЗЕМНЫМ БУРОВЫМ СКВАЖИНАМ | 2010 |
|
RU2542026C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕРТИКАЛЬНОГО И ГОРИЗОНТАЛЬНОГО УДЕЛЬНОГО СОПРОТИВЛЕНИЯ, А ТАКЖЕ УГЛОВ ОТНОСИТЕЛЬНОГО НАКЛОНА В АНИЗОТРОПНЫХ ГОРНЫХ ПОРОДАХ | 2003 |
|
RU2368922C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УСТОЙЧИВОСТИ СТВОЛА ГОРИЗОНТАЛЬНЫХ СКВАЖИН | 2011 |
|
RU2473802C2 |
| ТЕЛЕМЕТРИЧЕСКАЯ СИСТЕМА МОНИТОРИНГА СТВОЛА СКВАЖИНЫ | 2017 |
|
RU2646287C1 |
| БЛОК ОТКЛОНЕНИЯ СИСТЕМЫ УПРАВЛЕНИЯ БУРОВЫМ УСТРОЙСТВОМ | 2017 |
|
RU2655325C1 |
| US 7093672 B2, 22.08.2006. | |||

