ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящее изобретение относится к устройству обнаружения трехмерных объектов и к способу обнаружения трехмерных объектов.
Настоящая заявка испрашивает приоритет заявки на патент Японии № 2012-166514, поданной 27 июля 2012 года, и в указанных государствах, которые признают включение документа по ссылке, содержимое, описанное в вышеуказанной заявке, содержится в данном документе по ссылке и считается частью описания настоящей заявки.
УРОВЕНЬ ТЕХНИКИ
[0002] Известно устройство обнаружения помех, которое преобразует изображения, захваченные на периферии транспортного средства, в изображения вида "с высоты птичьего полета", и использует разности в двух подвергнутых преобразованию изображениях вида "с высоты птичьего полета", захваченных в разные моменты времени, для того чтобы обнаруживать помехи (см. патентный документ 1).
ДОКУМЕНТЫ ПРЕДШЕСТВУЮЩЕГО УРОВНЯ ТЕХНИКИ
ПАТЕНТНЫЕ ДОКУМЕНТЫ
[0003] Патентный документ 1. Выложенная заявка на патент Японии № 2008-227646
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
ПРОБЛЕМЫ, РАЗРЕШАЕМЫЕ ИЗОБРЕТЕНИЕМ
[0004] Предшествующий уровень техники имеет проблему в том, что поскольку загрязнение линзы камеры является причиной ошибочного обнаружения, очистка линзы выполняется в то время, когда захватываются изображения, но когда очищающая жидкость распыляется для того, чтобы очищать линзу, очищающая жидкость, прилипающая к поверхности линзы, вызывает изменения в информации изображений, препятствуя точному обнаружению трехмерных объектов.
[0005] Проблема, которая должна разрешаться посредством настоящего изобретения, заключается в том, чтобы предоставлять устройство обнаружения трехмерных объектов, которое обнаруживает другие транспортные средства, присутствующие в области обнаружения, с высокой точностью, даже когда очищающая жидкость распылена на линзу.
СРЕДСТВО ДЛЯ РАЗРЕШЕНИЯ УКАЗАННЫХ ПРОБЛЕМ
[0006] Настоящее изобретение разрешает проблему, описанную выше, посредством оценки, на основе конкретных действий, выполняемых в ходе предварительно определенного этапа очистки линзы, того, является или нет состояние линзы состоянием, подлежащим управлению, и когда состояние линзы является состоянием, подлежащим управлению, сохранения, в течение предварительно определенной продолжительности, результатов обнаружения или оценки от момента непосредственно перед тем, как состояние линзы оценено в качестве состояния, подлежащего управлению, и остановки обнаружения обнаруживаемого трехмерного объекта.
ПРЕИМУЩЕСТВО ИЗОБРЕТЕНИЯ
[0007] В настоящем изобретении, когда линза очищается с использованием очищающей жидкости, процесс обнаружения и процесс оценки трехмерных объектов останавливаются в соответствии с состоянием линзы, так что поддерживаются результаты обнаружения или результаты оценки от момента до того, как очищена линза, обеспечивая предотвращение таких ошибочных оценок, как изменение уже обнаруженного трехмерного объекта на необнаруженный в результате процесса очистки линзы или изменение необнаруженного трехмерного объекта на обнаруженный в результате процесса очистки линзы. Это обеспечивает возможность предоставления устройства обнаружения трехмерных объектов, которое предотвращает вызванное очисткой линзы снижение точности результатов обнаружения и обнаруживает другие транспортные средства, движущиеся в области обнаружения, с высокой точностью.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0008] Фиг. 1 является схематичным видом транспортного средства согласно варианту осуществления, к которому применяется устройство обнаружения трехмерных объектов настоящего изобретения.
Фиг. 2 является видом сверху транспортного средства по фиг. 1 в состоянии движения (обнаружение трехмерных объектов на основе информации формы разностного сигнала).
Фиг. 3 является блок-схемой подробностей компьютера от фиг. 1.
Фиг. 4 является пояснительной иллюстрацией общего представления процесса, выполняемого посредством модуля совмещения на фиг. 3, при этом фиг. 4(a) является видом сверху транспортного средства в состоянии движения, а фиг. 4(b) является изображением, показывающим общее представление процесса совмещения.
Фиг. 5 является схематичной иллюстрацией способа, которым формируется форма разностного сигнала посредством модуля обнаружения трехмерных объектов на фиг. 3.
Фиг. 6 является иллюстрацией малых областей, разделенные посредством модуля обнаружения трехмерных объектов на фиг. 3.
Фиг. 7 является иллюстрацией примера гистограммы, получаемой посредством модуля обнаружения трехмерных объектов по фиг. 3.
Фиг. 8 является иллюстрацией взвешивания, выполняемого посредством модуля обнаружения трехмерных объектов по фиг. 3.
Фиг. 9 является иллюстрацией процесса, выполняемого посредством модуля обнаружения размытостей на фиг. 3, и процесса вычисления посредством этого формы разностного сигнала.
Фиг. 10 является иллюстрацией другого примера гистограммы, полученной из модуля обнаружения трехмерных объектов по фиг. 3.
Фиг. 11 является блок-схемой последовательности операций (часть 1) способа обнаружения трехмерных объектов с использованием информации формы разностного сигнала, осуществляемого посредством модуля преобразования точки обзора, модуля совмещения, модуля обнаружения размытостей и модуля обнаружения трехмерных объектов по фиг. 3.
Фиг. 12 является блок-схемой последовательности операций (часть 2) способа обнаружения трехмерных объектов с использованием информации формы разностного сигнала, осуществляемого посредством модуля преобразования точки обзора, модуля совмещения, модуля обнаружения размытостей и модуля обнаружения трехмерных объектов по фиг. 3.
Фиг. 13 является иллюстрацией состояния движения транспортного средства, показанного на фиг. 1 (обнаружение трехмерных объектов на основе информации краев), причем фиг. 13(a) является видом сверху относительных позиций областей обнаружения и т.п., а фиг. 13(b) является видом в перспективе относительных позиций областей обнаружения и т.п. в реальном пространстве.
Фиг. 14 является иллюстрацией работы модуля вычисления яркостного различия по фиг. 3, при этом фиг. 14(a) является иллюстрацией относительных позиций линии концентрации внимания, опорной линии, точки концентрации внимания и опорной точки в изображении вида "с высоты птичьего полета", а фиг. 14(b) является иллюстрацией относительных позиций линии концентрации внимания, опорной линии, точки концентрации внимания и опорной точки в реальном пространстве.
Фиг. 15 является подробной иллюстрацией работы модуля вычисления яркостного различия по фиг. 3, при этом фиг. 15(a) является иллюстрацией области обнаружения в изображении вида "с высоты птичьего полета", а фиг. (b) является иллюстрацией относительных позиций линии концентрации внимания, опорной линии, точки концентрации внимания и опорной точки в изображении вида "с высоты птичьего полета".
Фиг. 16 является иллюстрацией линии края и распределения яркости на линии края, при этом фиг. 16(a) является иллюстрацией распределения яркости, когда трехмерный объект (транспортное средство) присутствует в области обнаружения, а фиг. 16(b) является иллюстрацией распределения яркости, когда трехмерный объект не присутствует в области обнаружения.
Фиг. 17 является блок-схемой последовательности операций (часть 1) способа обнаружения трехмерных объектов с использованием информации краев, осуществляемого посредством модуля преобразования точки обзора, модуля вычисления яркостного различия, модуля обнаружения линий краев и модуля обнаружения трехмерных объектов по фиг. 3.
Фиг. 18 является блок-схемой последовательности операций (часть 2) способа обнаружения трехмерных объектов с использованием информации краев, осуществляемого посредством модуля преобразования точки обзора, модуля вычисления яркостного различия, модуля обнаружения линий краев и модуля обнаружения трехмерных объектов по фиг. 3.
Фиг. 19 является иллюстрацией примерного изображения для детализации операции обнаружения краев.
Фиг. 20 является иллюстрацией примера информации изображений, захватываемой посредством камеры после того, как очищена линза.
Фиг. 21 является схематичной иллюстрацией конфигурации устройства для очистки линзы.
Фиг. 22 является временной диаграммой для описания этапа очистки линзы.
Фиг. 23 является иллюстрацией соответствия между состоянием линзы и точностью различных процессов в ходе очистки линзы.
Фиг. 24 является иллюстрацией соответствия между состоянием линзы и конкретными управляющими действиями, выполняемыми в различных процессах в ходе очистки линзы.
Фиг. 25 является блок-схемой последовательности операций способа, показывающей процедуру управления оценкой трехмерных объектов с учетом состояния линзы.
Фиг. 26 является блок-схемой последовательности операций способа для процедуры управления для задания процесса, подлежащего управлению, и конкретных управляющих действий согласно состоянию, подлежащему управлению.
Фиг. 27 является временной диаграммой для описания времени сохранения.
Фиг. 28 является блок-схемой конфигурации устройства для очистки смонтированной на транспортном средстве камеры согласно другому примеру.
Фиг. 29 является видом в перспективе конфигурации устройства для очистки смонтированной на транспортном средстве камеры согласно другому примеру.
Фиг. 30 является видом в перспективе в частичном сечении модуля камеры, предоставленного в устройстве для очистки смонтированной на транспортном средстве камеры согласно другому примеру.
Фиг. 31 является видом в поперечном сечении концевой секции форсунки, предоставленной в устройстве для очистки смонтированной на транспортном средстве камеры согласно другому примеру.
Фиг. 32 является иллюстрацией относительного расположения концевой секции форсунки и камеры, предоставленных в устройстве для очистки смонтированной на транспортном средстве камеры согласно другому примеру.
Фиг. 33 является видом в поперечном сечении модуля форсунки устройства для очистки смонтированной на транспортном средстве камеры согласно другому примеру.
Фиг. 34 является блок-схемой подробной конфигурации модуля управления устройства для очистки смонтированной на транспортном средстве камеры согласно другому примеру.
Фиг. 35 является блок-схемой последовательности операций способа для технологической процедуры для устройства для очистки смонтированной на транспортном средстве камеры согласно другому примеру.
Фиг. 36 является временной диаграммой, показывающей процесс для режима очистки под давлением, выполняемого посредством устройства для очистки смонтированной на транспортном средстве камеры согласно другому примеру.
Фиг. 37 является временной диаграммой, показывающей процесс для режима продувки воздухом, выполняемого посредством устройства для очистки смонтированной на транспортном средстве камеры согласно другому примеру.
Фиг. 38 является временной диаграммой, показывающей процесс для режима непрерывного промывания, выполняемого посредством устройства для очистки смонтированной на транспортном средстве камеры согласно другому примеру.
ПРЕДПОЧТИТЕЛЬНЫЕ ВАРИАНТЫ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[0009] ПЕРВЫЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ
Фиг. 1 является схематичным видом транспортного средства согласно одному варианту осуществления, к которому применено устройство 1 обнаружения трехмерных объектов согласно настоящему изобретению. Устройство 1 обнаружения трехмерных объектов настоящего примера обнаруживает другие транспортные средства, требующие внимания водителя рассматриваемого транспортного средства V в ходе вождения, к примеру, другие транспортные средства, с которыми рассматриваемое транспортное средство V может потенциально контактировать при смене полосы движения, в качестве помех. В частности, устройство 1 обнаружения трехмерных объектов настоящего примера обнаруживает другие транспортные средства, движущиеся в смежных полосах движения рядом с полосой движения, в которой движется рассматриваемое транспортное средство (далее также называются просто "смежными полосами движения"). Устройство 1 обнаружения трехмерных объектов настоящего примера также допускает вычисление проезжаемого расстояния и скорости движения обнаруженного другого транспортного средства. По этой причине, пример, описанный далее, является примером, в котором устройство 1 обнаружения трехмерных объектов установлено на рассматриваемом транспортном средстве V и обнаруживает, из числа различных обнаруженных трехмерных объектов в периферии рассматриваемого транспортного средства, другое транспортное средство, движущееся в смежной полосе движения рядом с полосой движения, в которой движется рассматриваемое транспортное средство V. Как показано на чертеже, устройство 1 обнаружения трехмерных объектов настоящего примера содержит камеру 10, оснащенную линзой 11, которая формирует изображения области сзади транспортного средства, датчиком 20 скорости транспортного средства, компьютером 30 и устройством 100 для очистки линзы для очистки линзы 11.
[0010] Как показано на фиг. 1, камера 10 присоединяется в местоположении в задней части рассматриваемого транспортного средства V на высоте h, так что ее оптическая ось формирует угол θ наклона вниз относительно горизонтали. Из этой позиции, камера 10 захватывает изображения предварительно определенной области окрестности рассматриваемого транспортного средства V. В настоящем варианте осуществления, одна камера 1 предоставляется для обнаружения трехмерных объектов позади рассматриваемого транспортного средства V, но в других вариантах использования, также может предоставляться другая камера для получения, например, изображений окрестности транспортного средства. Датчик 20 скорости транспортного средства обнаруживает скорость движения рассматриваемого транспортного средства V и вычисляет скорость транспортного средства на основе, например, скорости вращения колес, обнаруженной посредством датчика скорости вращения колес, который обнаруживает скорость вращения колеса. Компьютер 30 обнаруживает трехмерный объект сзади транспортного средства и в настоящем примере вычисляет проезжаемое расстояние и скорость движения трехмерного объекта.
[0011] Фиг. 2 является видом сверху рассматриваемого транспортного средства V в состоянии движения. Как показано на чертеже, камера 10 захватывает изображения задней части транспортного средства под предварительно определенным углом a обзора. Здесь, угол a обзора камеры 10 задается как угол обзора, обеспечивающий захват изображений не только полосы движения, в которой движется рассматриваемое транспортное средство V, но также и полос движения слева и справа. Фотографируемая область является задней частью рассматриваемого транспортного средства V и включает в себя целевые области A1, A2 обнаружения по смежным полосам движения слева и справа от полосы движения, в которой движется рассматриваемое транспортное средство V. В настоящем варианте осуществления, "задняя часть транспортного средства" включает в себя не только область непосредственно позади транспортного средства, но также и поперечные области сзади транспортного средства. Фотографируемая область задней части транспортного средства задается согласно углу обзора камеры 10. В одном примере, если взять 0° в качестве направления непосредственно сзади транспортного средства в продольном направлении транспортного средства, область может задаваться с возможностью включать в себя диапазон 0-90°, предпочтительно 0-70°, слева и справа от непосредственно обратного направления.
[0012] Фиг. 3 является блок-схемой подробностей компьютера 30 из фиг. 1. На фиг. 3, также показаны камера 10, датчик 20 скорости транспортного средства и устройство 100 для очистки линзы, так что взаимосвязь соединений является понятной.
[0013] Как показано на фиг. 3, компьютер 30 содержит модуль 31 преобразования точки обзора, модуль 32 совмещения, модуль 33 обнаружения трехмерных объектов, модуль 34 оценки трехмерных объектов, модуль 38 оценки состояния линзы, контроллер 39 и модуль 40 обнаружения размытостей. Модуль 30 вычисления имеет конфигурацию, связанную с блоком обнаружения трехмерных объектов с использованием информации формы разностного сигнала. Компьютер 30 настоящего варианта осуществления также может иметь конфигурацию, связанную с блоком обнаружения трехмерных объектов с использованием информации краев. В этом случае, блочная конфигурация A обнаружения, содержащая модуль 32 совмещения и модуль 33 обнаружения трехмерных объектов, показанный на фиг. 3, может быть заменена посредством блочной конфигурации B обнаружения, содержащей модуль 35 вычисления яркостного различия, модуль 36 обнаружения линий краев и модуль 37 обнаружения трехмерных объектов, обведенные посредством пунктирной линии на фиг. 3. Как должно быть очевидным, также возможна конфигурация, которая содержит как блочную конфигурацию A обнаружения, так и блочную конфигурацию B обнаружения и выполняет как обнаружение трехмерных объектов на основе информации формы разностного сигнала, так и обнаружение трехмерных объектов на основе информации краев. Если предоставляются как блочная конфигурация A обнаружения, так и блочная конфигурация B обнаружения, то блочная конфигурация A обнаружения или блочная конфигурация B обнаружения может работать, например, согласно факторам окружающей среды, таким как яркость. Далее описываются эти различные конфигурации.
[0014] ОБНАРУЖЕНИЕ ТРЕХМЕРНЫХ ОБЪЕКТОВ НА ОСНОВЕ ИНФОРМАЦИИ ФОРМЫ РАЗНОСТНОГО СИГНАЛА
Устройство 1 обнаружения трехмерных объектов настоящего варианта осуществления обнаруживает трехмерные объекты, присутствующие в правосторонней области обнаружения или в левосторонней области обнаружения сзади транспортного средства, на основе информации изображений, полученной посредством монокулярной камеры 1, снимающей изображения задней части транспортного средства.
[0015] Захваченные данные изображений предварительно определенной области, захваченные посредством камеры 10, вводятся в модуль 31 преобразования точки обзора, который выполняет преобразование точки обзора захваченных данных изображений в данные изображений вида "с высоты птичьего полета", показывающие вид "с высоты птичьего полета". Здесь, "вид с высоты птичьего полета" означает вид с точки обзора воображаемой камеры, смотрящей вниз с воздуха, например, вертикально вниз. Это преобразование точки обзора может выполняться так, как раскрыто, например, в выложенной заявке на патент Японии № 2008-219063. Захваченные данные изображений подвергаются преобразованию точки обзора в данные изображений вида "с высоты птичьего полета" на основе такого принципа, что вертикальные края, уникальные для трехмерных объектов, преобразуются в группы прямых линий, проходящие через конкретные фиксированные точки, через преобразование точки обзора в данные изображений вида "с высоты птичьего полета", которые могут быть использованы для того, чтобы отличать плоские объекты и трехмерные объекты. Результаты процесса преобразования изображений, выполняемого посредством модуля 31 преобразования точки обзора, также используются для того, чтобы обнаруживать трехмерные объекты с использованием информации краев, как описано далее.
[0016] Данные изображений вида "с высоты птичьего полета", полученные через преобразование точки обзора, выполняемое посредством модуля 31 преобразования точки обзора, последовательно вводятся в модуль 32 совмещения, который совмещает данные изображений вида "с высоты птичьего полета", введенные в разные моменты времени. Фиг. 4 является пояснительной иллюстрацией общего представления процесса, выполняемого посредством модуля совмещения, при этом фиг. 4(a) является видом сверху рассматриваемого транспортного средства V в состоянии движения, а фиг. 4(b) является изображением, показывающим общее представление процесса совмещения.
[0017] Как показано на фиг. 4(a), рассматриваемое транспортное средство V размещается в V1 в данный момент времени, и рассматриваемое транспортное средство V размещено в V2 за один момент времени до этого. Другое транспортное средство VX размещается позади рассматриваемого транспортного средства V и движется параллельно с другим транспортным средством VX, причем другое транспортное средство VX размещается в V3 в настоящий момент времени, а другое транспортное средство VX размещается в V4 за один момент времени до этого. Помимо этого, считается, что рассматриваемое транспортное средство V перемещается на расстояние d за один момент времени. "Один момент до этого" может представлять собой время через предварительно определенную продолжительность (например, один цикл управления) ранее от текущего момента времени или может представлять собой время через любую требуемую продолжительность ранее.
[0018] В этом состоянии, текущее изображение PBt вида "с высоты птичьего полета" является таким, как показано на фиг. 4(b). В этом изображении PBt вида "с высоты птичьего полета" белые линии дорожной разметки, нарисованные на поверхности дороги, выглядят в качестве прямоугольных форм, указывающих их относительно точный вид сверху, но позиция другого транспортного средства VX в позиции V3 сплющивается. Аналогично, в изображении PBt-1 вида "с высоты птичьего полета" за один момент времени до этого, белые линии дорожной разметки, нарисованные на поверхности дороги, выглядят в качестве прямоугольных форм, указывающих их относительно точный вид сверху, но другое транспортное средство VX в позиции V4 сплющивается. Как уже указано, вертикальные края трехмерного объекта (включающие в себя края, выступающие от поверхности дороги в трехмерном пространстве, а также вертикальные края в строгом смысле) выглядят в качестве группы прямых линий вдоль направления сплющивания в результате процесса преобразования точки обзора в данные изображений вида "с высоты птичьего полета", тогда как плоские изображения на поверхности дороги не содержат вертикальные края и, следовательно, не демонстрируют сплющивание даже после преобразования точки обзора.
[0019] Модуль 32 совмещения совмещает вышеописанные изображения PBt, PBt-1 вида "с высоты птичьего полета" в данных. В ходе этого процесса, модуль 32 совмещения смещает изображение PBt-1 вида "с высоты птичьего полета" за один момент времени до этого и совмещает его с позицией текущего изображения PBt вида "с высоты птичьего полета". Изображения слева и в центре по фиг. 4(b) показаны смещенными на проезжаемое расстояние d′. Величина d′ смещения является величиной перемещения в данных изображений вида "с высоты птичьего полета", соответствующих фактическому проезжаемому расстоянию d рассматриваемого транспортного средства V, показанного на фиг. 4(a), и оценивается на основе сигнала из датчика 20 скорости транспортного средства и продолжительности от одного момента времени до этого до текущего момента времени.
[0020] После того, выполнено совмещение, модуль 32 совмещения выясняет разность между изображениями PBt, PBt-1 при виде "с высоты птичьего полета" и формирует данные для разностного изображения PDt. Пиксельные значения разностного изображения PDt могут быть абсолютными значениями разностей между пиксельными значениями изображений PBt, PBt-1 вида "с высоты птичьего полета" либо могут задаваться равными 1, если абсолютные значения превышают предварительно определенное пороговое значение p, и равными 0, если не предназначены для того, чтобы отражать изменения в уровне освещенности окружающей среды. Изображение справа на фиг. 4(b) представляет собой разностное изображение PDt. Это пороговое значение p может быть предварительно установлено или может варьироваться согласно команде управления, выданной согласно результатам, обнаруженным посредством модуля 38 оценки состояния линзы контроллера 39, как описано далее.
[0021] Возвращаясь к фиг. 3, модуль 33 обнаружения трехмерных объектов обнаруживает трехмерный объект на основе данных разностного изображения PDt, показанного на фиг. 4(b). В это время, модуль 33 обнаружения трехмерных объектов настоящего примера также вычисляет проезжаемое расстояние трехмерного объекта в реальном пространстве. Чтобы обнаруживать трехмерный объект и вычислять проезжаемое расстояние этого, модуль 33 обнаружения трехмерных объектов сначала формирует форму разностного сигнала. Проезжаемое расстояние в единицу времени для трехмерного объекта используется для того, чтобы вычислять скорость движения трехмерного объекта. Скорость движения трехмерного объекта затем может быть использована для того, чтобы определять, является или нет трехмерный объект транспортным средством.
[0022] Чтобы формировать форму разностного сигнала, модуль 33 обнаружения трехмерных объектов настоящего варианта осуществления задает область обнаружения в разностном изображении PDt. Устройство 1 обнаружения трехмерных объектов настоящего примера обнаруживает другие транспортные средства, требующие внимания водителя рассматриваемого транспортного средства V, в частности, другие транспортные средства, движущиеся в полосах движения, смежных с полосой движения, в которой движется рассматриваемое транспортное средство V, и с которыми имеется вероятность контакта, если рассматриваемое транспортное средство V должно сменять полосу движения, в качестве целей обнаружения. Таким образом, в настоящем примере, в котором трехмерные объекты обнаруживаются на основе информации изображений, две области обнаружения в правой и левой стороне рассматриваемого транспортного средства V задаются в изображениях, полученных посредством камеры 1. В частности, в настоящем варианте осуществления, прямоугольные области A1, A2 обнаружения задаются на правой и левой стороне позади рассматриваемого транспортного средства V, как показано на фиг. 2. Другое транспортное средство, обнаруженное в областях A1, A2 обнаружения, обнаруживается в качестве помехи, движущейся в смежной полосе движения рядом с полосой движения, в которой движется рассматриваемое транспортное средство V. Эти области A1, A2 обнаружения могут задаваться на основе относительной позиции относительно рассматриваемого транспортного средства V или в отношении позиций белых линий дорожной разметки. Если области обнаружения задаются с использованием позиций белых линий дорожной разметки в качестве опорных, устройство 1 обнаружения проезжаемого расстояния может использовать, например, известную технологию распознавания линий дорожной разметки и т.п.
[0023] Модуль 33 обнаружения трехмерных объектов распознает границы заданных областей A1, A2 обнаружения посредством транспортного средства V (границы, соответствующие направлению движения), в качестве линий L1, L2 контакта с землей (фиг. 2). В общем, "линия контакта с землей" означает линию, в которой трехмерный объект контактирует с землей, но в настоящем варианте осуществления линии контакта с землей не являются линиями контакта с землей, а вместо этого задаются так, как описано выше. С другой стороны, опыт показывает, что это не представляет собой проблему на практике, поскольку нет существенного отличия между "линиями контакта с землей" согласно настоящему варианту осуществления и линиями контакта с землей, которые нормально оцениваются на основе позиции другого транспортного средства VX.
[0024] Фиг. 5 является схематичной иллюстрацией способа, которым формируется форма разностного сигнала посредством модуля 33 обнаружения трехмерных объектов, показанного на фиг. 5. Как показано на фиг. 5, модуль 33 обнаружения трехмерных объектов формирует форму DWt разностного сигнала на основе этих частей разностного изображения PDt (правого изображения на фиг. 4(b)), вычисленный посредством модуля 32 совмещения, которые соответствуют областям A1, A2 обнаружения. В ходе этого процесса, модуль 33 обнаружения трехмерных объектов формирует форму DWt разностного сигнала вдоль направления, в котором трехмерный объект сплющивается в результате преобразования точки обзора. В примере, показанном на фиг. 5, только область A1 обнаружения показывается для удобства, но форма DWt разностного сигнала также формируется для области A2 обнаружения согласно аналогичной процедуре.
[0025] В частности, модуль 33 обнаружения трехмерных объектов задает линию La в направлении сплющивания трехмерного объекта в данных для разностного изображения DWt. Модуль 33 обнаружения трехмерных объектов затем подсчитывает число разностных пикселов DP, указывающих предварительно определенную разность на линии La. Разностные пикселы DP, указывающие предварительно определенную разность, являются пикселами, превышающими предварительно определенное пороговое значение, если пиксельные значения разностного изображения DWt являются абсолютными значениями разностей в пиксельных значениях между изображениями PBt, PBt-1 вида "с высоты птичьего полета", и являются пикселами, указывающими 1, если пиксельные значения разностного изображения DWt представляются посредством 0 и 1.
[0026] После подсчета числа разностных пикселов DP, модуль 33 обнаружения трехмерных объектов выясняет пересечение CP между линией La и линией L1 контакта с землей. Модуль 33 обнаружения трехмерных объектов затем ассоциирует пересечение CP и подсчитанное число, оценивает позицию на горизонтальной оси, т.е. позицию на оси, идущую в направлении вверх и вниз справа на фиг. 5, на основе позиции пересечения CP, оценивает позицию на вертикальной оси, т.е. позицию на оси, идущую в направлении слева направо справа на фиг. 5, на основе подсчитанного числа и определяет позиции на графике в качестве подсчитанных чисел на пересечении CP.
[0027] Затем, модуль 33 обнаружения трехмерных объектов аналогично задает линии Lb, Lc, …, в направлении сплющивания трехмерного объекта, подсчитывает число разностных пикселов DP, оценивает позиции на горизонтальной оси на основе позиций пересечений CP, оценивает позиции на вертикальной оси на основе подсчитанных чисел (числа разностных пикселов DP), и определяет позиции на графике. Модуль 33 обнаружения трехмерных объектов последовательно повторяет процесс, описанный выше, для того чтобы создавать частотное распределение, посредством этого формируя форму DWt разностного сигнала, как показано справа на фиг. 5.
[0028] Как показано слева на фиг. 5, линия La и линия Lb, идущие в направлении сплющивания трехмерного объекта, различаются с точки зрения величины перекрытия с областью A1 обнаружения. По этой причине, если область A1 обнаружения заполнена разностными пикселами DP, предусмотрено больше разностных пикселов DP на линии La, чем на линии Lb. Таким образом, если позиция на вертикальной оси оценивается на основе подсчитанного числа разностных пикселов DP, модуль 33 обнаружения трехмерных объектов выполняет нормализацию на основе величины перекрытия между областью A1 обнаружения и линиями La, Lb, идущими в направлении сплющивания трехмерного объекта. В конкретном примере, предусмотрено шесть разностных пикселов DP на линии La слева на фиг. 5 и пять разностных пикселов DP на линии Lb. Следовательно, для того, чтобы определять позицию на вертикальной оси на основе подсчитанного числа на фиг. 5, модуль 33 обнаружения трехмерных объектов выполняет нормализацию, например, посредством деления подсчитанного числа на расстояние перекрытия. Как результат, значения на форме DWt разностного сигнала, соответствующие линиям La, Lb в направлении сплющивания трехмерного объекта, являются практически идентичными, как показано посредством формы DWt разностного сигнала.
[0029] После того, как сформирована форма DWt разностного сигнала, модуль 33 обнаружения трехмерных объектов вычисляет проезжаемое расстояние посредством сравнения с формой DWt-1 разностного сигнала за один момент времени до этого. В частности, модуль 33 обнаружения трехмерных объектов вычисляет проезжаемое расстояние на основе изменения во времени между формами DWt, DWt-1 разностных сигналов.
[0030] В частности, модуль 33 обнаружения трехмерных объектов разделяет форму DWt разностного сигнала на множество малых областей DWt1-DWtn (n является любым целым числом, равным 2 или выше), как показано на фиг. 6. Фиг. 6 является иллюстрацией малых областей DWt1-DWtn, разделенных посредством модуля 33 обнаружения трехмерных объектов. Малые области DWt1-DWtn разделяются таким образом, что они перекрывают друг друга, как показано, например, на фиг. 6. Например, перекрываются малая область DWt1 и малая область DWt2, и перекрываются DWt2 и DWt3.
[0031] Затем, модуль 33 обнаружения трехмерных объектов оценивает величину смещения (величину движения в направлении по горизонтальной оси формы разностного сигнала (в направлении вверх и вниз на фиг. 6)) для каждой из малых областей DWt1-DWtn. Величины смещения оцениваются на основе разности (т.е. расстояния в направлении по горизонтальной оси) между формой DWt-1 разностного сигнала за один момент времени до этого и формой DWt разностного сигнала в данный момент времени. В ходе этого процесса, модуль 33 обнаружения трехмерных объектов оценивает позицию (т.е. позицию в направлении по горизонтальной оси) для каждой из малых областей DWt1-DWtn, в которых минимизируется отклонение от формы DWt разностного сигнала, в данный момент времени, когда форма DWt-1 разностного сигнала за один момент времени до этого перемещается в направлении по горизонтальной оси, и вычисляет величину движения в направлении по горизонтальной оси между исходной позицией формы DWt-1 разностного сигнала и позицией, в которой отклонение минимизируется, в качестве величины смещения. Модуль 33 обнаружения трехмерных объектов затем подсчитывает величины смещения, выясненные для каждой из малых областей DWt1-DWtn, и создает гистограмму.
[0032] Фиг. 7 является иллюстрацией примера гистограммы, полученной посредством модуля 33 обнаружения трехмерных объектов. Как показано на фиг. 7, имеется определенная степень переменности в величине смещения, составляющей величину движения, так что минимизируется отклонение между малыми областями DWt1-DWtn и формой DWt-1 разностного сигнала за один момент времени до этого. Таким образом, модуль 33 обнаружения трехмерных объектов создает гистограмму содержащей переменность величины смещения и вычисляет проезжаемое расстояние на основе гистограммы. В ходе этого процесса, модуль 33 обнаружения трехмерных объектов вычисляет проезжаемое расстояние трехмерного объекта из максимального значения гистограммы. В частности, в примере, показанном на фиг. 7, модуль 33 обнаружения трехмерных объектов вычисляет величину смещения, указывающую максимальное значение гистограммы, в качестве проезжаемого расстояния τ*. Это проезжаемое расстояние τ* является относительным проезжаемым расстоянием другого транспортного средства VX относительно рассматриваемого транспортного средства V. Таким образом, при вычислении абсолютного проезжаемого расстояния, модуль 33 обнаружения трехмерных объектов вычисляет абсолютное проезжаемое расстояние на основе полученного проезжаемого расстояния τ* и сигнала из датчика 20 скорости транспортного средства.
[0033] При создании гистограммы модуль 33 обнаружения трехмерных объектов может применять взвешивание к каждой из множества малых областей DWt1-DWtn и подсчитывать величины смещения, выясненные для каждой из малых областей DWt1-DWtn, согласно взвешиванию, чтобы создавать гистограмму. Фиг. 8 является иллюстрацией взвешивания выполняемого посредством модуля 33 обнаружения трехмерных объектов.
[0034] Как показано на фиг. 8, малая область DWm (m является целым числом, по меньшей мере, равным 1 и не большим n-1) является плоской. В частности, существует только малая разность между максимальным и минимальным числами пикселов, указывающими предварительно определенную разность в малой области DWm. Модуль 33 обнаружения трехмерных объектов уменьшает взвешивание для этого типа малой области DWm. Это обусловлено тем, что такие сглаженная малая область DWm не имеет характеристик, приводящих к высокой вероятности ошибки при вычислении.
[0035] Малая область DWm+k (k является целым числом, не большим n-m) имеет явно выраженные поднятые и опущенные секции. В частности, существует значительная разность между максимальным и минимальным числами пикселов, указывающими предварительно определенную разность в малой области DWm. Модуль 33 обнаружения трехмерных объектов увеличивает взвешивание для этого типа малой области DWm. Это обусловлено тем, что малая область DWm+k с четко видимым контуром имеет отличительные признаки, то приводящие к высокой вероятности способности точно вычислять величину смещения. Такое взвешивание обеспечивает повышенную точность при вычислении проезжаемого расстояния.
[0036] В варианте осуществления, описанном выше, форма DWt разностного сигнала разделяется на множество малых областей DWt1-DWtn, чтобы повышать точность вычисления проезжаемого расстояния, разделение на малые области DWt1-DWtn может опускаться, если нет значительной потребности в точности при вычислении проезжаемого расстояния. В таких случаях, модуль 33 обнаружения трехмерных объектов вычисляет проезжаемое расстояние из величины смещения для формы DWt разностного сигнала, которая минимизирует отклонение между формой DWt разностного сигнала и формой DWt-1 разностного сигнала. Другими словами, способ, используемый для того, чтобы определять величину смещения между формой DWt-1 разностного сигнала за один момент времени до этого и формой DWt разностного сигнала в данный момент времени, не ограничивается способом, описанным выше.
[0037] Возвращаясь к фиг. 3, компьютер 30 содержит модуль 40 обнаружения размытостей. Модуль 40 обнаружения размытостей обнаруживает области возникновения размытости с использованием данных для изображения, захваченного посредством камеры 10. Поскольку размывание является явлением белых полос, которое возникает в CCD-датчиках изображений и т.п., модуль 40 обнаружения размытостей может опускаться, если используется камера 10 с использованием CMOS-датчика изображений и т.п., который не подвергается размыванию.
[0038] Фиг. 9 является изображением, иллюстрирующим процесс, выполняемый посредством модуля 40 обнаружения размытостей, и процесс вычисления посредством этого формы DWt разностного сигнала. Во-первых, допустим, что данные для захваченного изображения P, в котором присутствует размытость S, вводятся в модуль 40 обнаружения размытостей. Модуль 40 обнаружения размытостей обнаруживает размытость S в захваченном изображении P. Предусмотрены различные способы для обнаружения размытости S; если, например, используется типичная камера на основе прибора с зарядовой связью (CCD), размытость S появляется только в части изображения ниже источника света. По этой причине, область, имеющая значение яркости с предварительно определенным значением или более и идущая вверх в вертикальном направлении от нижней части изображения к верхней части изображения, обнаруживается и идентифицируется в качестве области возникновения размытости S в настоящем варианте осуществления.
[0039] Модуль 40 обнаружения размытостей формирует данные изображения SP с размытостью, в которых пиксельные значения задаются равными 1 в местоположениях, в которых возникает размытость S, и равными 0 в других местоположениях. После формирования данных для изображения SP с размытостью модуль 40 обнаружения размытостей передает данные в модуль 31 преобразования точки обзора. После того, как введены данные изображения SP с размытостью, модуль 31 преобразования точки обзора выполняет преобразование точки обзора, преобразующее данные в вид "с высоты птичьего полета". Модуль 31 преобразования точки обзора посредством этого формирует данные для изображения SBt при виде "с высоты птичьего полета" с размытостью. После формирования данных для изображения SBt вида "с высоты птичьего полета" с размытостью модуль 31 преобразования точки обзора отправляет данные в модуль 33 совмещения. Модуль 31 преобразования точки обзора также отправляет данные для изображения SBt-1 вида "с высоты птичьего полета" с размытостью за один момент времени до этого в модуль 33 совмещения.
[0040] Модуль 32 совмещения совмещает изображения SBt, SBt-1 вида "с высоты птичьего полета" с размытостью в данных. Конкретный процесс совмещения выполняется способом, аналогичным совмещению изображений PBt, PBt-1 вида "с высоты птичьего полета" в данных. После совмещения модуль 32 совмещения выясняет логическую сумму областей, в которых возникает размытость S в изображениях SBt, SBt-1 вида "с высоты птичьего полета" с размытостью. Модуль 32 совмещения затем использует ее для того, чтобы формировать данные для изображения MP с маской. После формирования данных для изображения MP с маской модуль 32 совмещения передает данные в модуль 33 обнаружения трехмерных объектов.
[0041] Модуль 33 обнаружения трехмерных объектов задает значение счетчика для частотного распределения равным нулю в местоположениях, соответствующих областям возникновения размытости S в изображении MP с маской. В частности, если сформирована форма DWt разностного сигнала, к примеру, форма DWt разностного сигнала, показанная на фиг. 9, модуль 33 обнаружения трехмерных объектов задает значение SC счетчика для размытости S равным нулю и формирует скорректированную форму DWt′ разностного сигнала.
[0042] В настоящем варианте осуществления, модуль 33 обнаружения трехмерных объектов оценивает скорость движения транспортного средства V (камера 10) и оценивает величину смещения для стационарного объекта на основе оцениваемой скорости движения. После оценки величины смещения для стационарного объекта, модуль 33 обнаружения трехмерных объектов пренебрегает величиной смещения, соответствующей стационарному объекту, из максимальных значений гистограммы и вычисляет проезжаемое расстояние трехмерного объекта.
[0043] Фиг. 10 является иллюстрацией другого примера гистограммы, полученной посредством модуля 33 обнаружения трехмерных объектов. Если другой стационарный объект, отличный от другого транспортного средства VX, присутствует в пределах угла обзора камеры 10, два максимальных значения τ1, τ2 появляются на полученной гистограмме. В этом случае, одно из двух максимальных значений τ1, τ2 является величиной смещения для стационарного объекта. Следовательно, модуль 33 обнаружения трехмерных объектов оценивает величину смещения для стационарного объекта на основе скорости движения, игнорирует максимальное значение, соответствующее величине смещения, и вычисляет проезжаемое расстояние для трехмерного объекта с использованием оставшегося максимального значения.
[0044] Даже если величины смещения, соответствующие стационарным объектам, игнорируются, если имеется несколько максимальных значений, может быть несколько других транспортных средств VX в пределах угла обзора камеры 10. Тем не менее, чрезвычайно редко несколько других транспортных средств VX присутствуют в областях A1, A2 обнаружения. Модуль 33 обнаружения трехмерных объектов посредством этого отменяет вычисление проезжаемого расстояния.
[0045] Далее описывается процедура обнаружения трехмерных объектов на основе информации формы разностного сигнала. Фиг. 11 и фиг. 12 иллюстрируют блок-схему последовательности операций способа для процедуры обнаружения трехмерных объектов согласно настоящему варианту осуществления. Как показано на фиг. 11, данные для захваченного изображения P, захваченного посредством камеры 10, сначала вводятся в компьютер 30, и модуль 40 обнаружения размытостей формирует изображение SP с размытостью (S1). Затем, модуль 31 преобразования точки обзора формирует данные для изображения PBt вида "с высоты птичьего полета" из данных для захваченного изображения P, захваченного посредством камеры 10, и данные для изображения SBt вида "с высоты птичьего полета" с размытостью формируются из данных для изображения SP с размытостью (S2).
[0046] Модуль 33 совмещения затем совмещает данные для изображения PBt вида "с высоты птичьего полета" и данные для изображения PBt-1 вида "с высоты птичьего полета" за один момент времени до этого и совмещает данные для изображения SBt вида "с высоты птичьего полета" с размытостью и данные для изображения SBt-1 вида "с высоты птичьего полета" с размытостью за один момент времени до этого (S3). После того, как выполнено это совмещение, модуль 33 совмещения формирует данные для разностного изображения PDt и данные для изображения MP с маской (S4). Модуль 33 обнаружения трехмерных объектов затем формирует форму DWt разностного сигнала из данных для разностного изображения PDt и данных для разностного изображения PDt-1 за один момент времени до этого (S5). После формирования формы DWt разностного сигнала модуль 33 обнаружения трехмерных объектов задает значение счетчика для частей формы DWt разностного сигнала, соответствующее областям возникновения размытости S, равным нулю, минимизируя эффекты размытости S (S6).
[0047] Модуль 33 обнаружения трехмерных объектов затем оценивает, равен или превышает либо нет пик формы DWt разностного сигнала первое пороговое значение α (S7). Первое пороговое значение α предварительно установлено и может быть изменено посредством команды управления из контроллера 39, показанного на фиг. 3; далее описываются подробности этого процесса. Если пик формы DWt разностного сигнала не равен или превышает первое пороговое значение α, т.е. если практически нет разности, считается, что трехмерный объект не присутствует в захваченном изображении P. Следовательно, если оценивается то, что пик формы DWt разностного сигнала не равен или превышает первое пороговое значение α (S7: "Нет"), модуль 33 обнаружения трехмерных объектов оценивает то, что не присутствует трехмерный объект или другое транспортное средство, составляющее помеху (фиг. 12: S16). Процесс, показанный на фиг. 11 и 12, после этого завершается.
[0048] Между тем, если оценивается то, что пик формы DWt разностного сигнала равен или превышает первое пороговое значение α (S7: "Да"), модуль 33 обнаружения трехмерных объектов оценивает то, что присутствует трехмерный объект, и разделяет форму DWt разностного сигнала на множество малых областей DWt1-DWtn (S8). Далее модуль 33 обнаружения трехмерных объектов назначает взвешивание каждой из малых областей DWt1-DWtn (S9). Модуль 33 обнаружения трехмерных объектов затем вычисляет величину смещения для каждой из малых областей DWt1-DWtn (S10) и формирует взвешенную гистограмму (S11).
[0049] Модуль 33 обнаружения трехмерных объектов затем вычисляет относительное проезжаемое расстояние, составляющее проезжаемое расстояние трехмерного объекта относительно рассматриваемого транспортного средства V, на основе гистограммы (S12). Далее модуль 33 обнаружения трехмерных объектов вычисляет абсолютную скорость движения трехмерного объекта на основе относительного проезжаемого расстояния (S13). В это время, модуль 33 обнаружения трехмерных объектов вычисляет относительную скорость движения посредством дифференцирования во времени относительного проезжаемого расстояния и прибавляет скорость рассматриваемого транспортного средства, вычисленную посредством датчика 20 скорости транспортного средства, чтобы вычислять абсолютную скорость движения.
[0050] Затем модуль 33 обнаружения трехмерных объектов оценивает, составляет или нет абсолютная скорость движения трехмерного объекта 10 км/ч или более, и составляет или нет относительная скорость движения трехмерного объекта относительно рассматриваемого транспортного средства V+60 км/ч или менее (S14). Если оба условия удовлетворяются (S14: "Да"), модуль 33 обнаружения трехмерных объектов оценивает то, что трехмерный объект является другим транспортным средством VX (S15). Процесс, показанный на фиг. 11 и 12, после этого завершается. Когда любое из условий не удовлетворяется (S14: "Нет"), модуль 33 обнаружения трехмерных объектов оценивает то, что другое транспортное средство не присутствует (S16). Процесс, показанный на фиг. 11 и 12, после этого завершается.
[0051] В настоящем варианте осуществления, области A1, A2 обнаружения задаются для рассматриваемого транспортного средства V, и основное внимание уделяется обнаружению других транспортных средств VX, движущихся в полосах движения, смежных с полосой движения, в которой движется рассматриваемое транспортное средство V, которые требуют внимания в то время, когда движется рассматриваемое транспортное средство V, и, в частности, в отношении того, имеется или нет вероятность контакта с ними, когда рассматриваемое транспортное средство V сменяет полосу движения. Это служит для того, чтобы определять, имеется или нет вероятность контакта с другим транспортным средством VX, движущимся в смежной полосе движения рядом с полосой движения, в которой движется рассматриваемое транспортное средство V, когда рассматриваемое транспортное средство сменяет полосу движения. Процесс в S14 выполняется по этой причине. В частности, при условии, что система настоящего варианта осуществления активируется на шоссе, если скорость трехмерного объекта составляет меньше 10 км/ч, почти никогда не возникают проблемы, даже если присутствует другое транспортное средство VX, поскольку оно должно размещаться на большом расстоянии позади рассматриваемого транспортного средства V, когда оно сменяет полосу движения. Аналогично, если относительная скорость движения трехмерного объекта относительно рассматриваемого транспортного средства V превышает +60 км/ч (т.е. если трехмерный объект движется со скоростью, более чем на 60 км/ч превышающей скорость рассматриваемого транспортного средства V), почти никогда не возникают проблемы, поскольку объект должен находиться в движении впереди рассматриваемого транспортного средства V, когда оно сменяет полосу движения. Следовательно, S14 также может считаться процессом оценки того, представляет или нет другое транспортное средство VX проблему при смене полосы движения.
[0052] Оценка на этапе S14 того, составляют или нет абсолютная скорость движения трехмерного объекта 10 км/ч или выше и относительная скорость движения трехмерного объекта относительно рассматриваемого транспортного средства V +60 км/ч или менее, обеспечивает следующие преимущества. Например, возможно то, что ошибка в прикреплении камеры 10 может вызывать обнаружение стационарного объекта как имеющего абсолютную скорость движения в несколько км/ч. Таким образом, оценка того, составляет или нет скорость 10 км/ч или более, позволяет снижать риск рассмотрения стационарного объекта в качестве другого транспортного средства VX. Также возникает риск обнаружения относительной скорости трехмерного объекта относительно рассматриваемого транспортного средства V как превышающей +60 км/ч в зависимости от уровня шума. Таким образом, оценка того, составляет или нет относительная скорость +60 км/ч или менее, дает возможность снижения вероятности вызванного шумом некорректного обнаружения.
[0053] На этапе S14 относительные пороговые значения скорости движения, используемые для того, чтобы идентифицировать другие транспортные средства VX, могут задаваться требуемым образом. Например, относительные пороговые значения скорости движения могут задаваться равными -20 км/ч или более и 100 км/ч или менее. Отрицательное минимальное значение является минимальным значением для скорости движения, когда обнаруженный объект движется позади рассматриваемого транспортного средства, т.е. когда обнаруженный объект обгоняется посредством транспортного средства. Эти пороговые значения могут быть предварительно установлены требуемым образом, но могут быть изменены согласно команде управления из контроллера 39, как описано далее.
[0054] Также можно подтверждать, что абсолютная скорость движения не является отрицательной или не составляет 0 км/ч, вместо выполнения процесса этапа S14. Поскольку настоящий вариант осуществления фокусируется на том, имеется или нет вероятность контакта, когда рассматриваемое транспортное средство V сменяет полосу движения, также допустимо выдавать предупреждающий звук водителю рассматриваемого транспортного средства или отображать на предварительно определенном устройстве отображения эквивалент предупреждения, если другое транспортное средство VX обнаруживается на этапе S15.
[0055] На этапе S15, оценивается, обнаруживается или нет трехмерный объект, обнаруженный посредством модуля 33 обнаружения трехмерных объектов, непрерывно в течение предварительно определенной продолжительности T или более. Если трехмерный объект непрерывно обнаруживается в течение предварительно определенной продолжительности T или более, процесс переходит к этапу S16, и трехмерный объект идентифицируется как представляющий собой другое транспортное средство, присутствующее в правосторонней области A1 обнаружения или в левосторонней области A2 обнаружения. В противном случае, процесс переходит к этапу S17, и выполняется определение того, что другое транспортное средство не присутствует.
[0056] С использованием процесса обнаружения трехмерных объектов на основе информации формы разностного сигнала, как указано в настоящем примере, форма DWt разностного сигнала формируется посредством подсчета числа пикселов, демонстрирующих предварительно определенную разность вдоль направления, в котором трехмерный объект сплющивается в результате преобразования точки обзора в данных для разностного изображения PDt, и создания частотного распределения для них. В этом контексте, "пикселы, демонстрирующие предварительно определенную разность в данных для разностного изображения PDt", являются пикселами, демонстрирующими разности в изображениях, захваченных в разные моменты времени, и другими словами, могут рассматриваться как указывающие местоположения, в которых присутствует трехмерный объект. По этой причине, подсчитывается число пикселов в направлении сплющивания трехмерного объекта в местоположении, в котором присутствует трехмерный объект, и для них создается частотное распределение, посредством этого формируя форму DWt разностного сигнала. В частности, поскольку подсчитывается число пикселов в направлении сплющивания трехмерного объекта, информация направления высоты для трехмерного объекта используется для того, чтобы формировать форму DWt разностного сигнала. Проезжаемое расстояние трехмерного объекта затем вычисляется на основе изменения во времени в форме DWt разностного сигнала, которая содержит информацию направления высоты. Поскольку информация направления высоты для обнаруженного местоположения до и после изменения во времени включается в процесс идентификации вместо фокусировки на перемещении только в одной точке, местоположение зачастую является идентичным местоположением на трехмерном объекте, и проезжаемое расстояние вычисляется на основе изменения во времени в идентичном местоположении, обеспечивая повышенную точность при вычислении проезжаемого расстояния.
[0057] Значение счетчика для частотного распределения задается равным нулю в местоположениях, соответствующих областям возникновения размытости S в форме DWt разностного сигнала. Как результат, удаляются местоположения формы сигнала в форме DWt разностного сигнала, сформированной посредством размытости S, предотвращая ошибочное распознавание размытости S в качестве трехмерного объекта.
[0058] Помимо этого, проезжаемое расстояние трехмерного объекта вычисляется на основе величины смещения для формы DWt разностного сигнала, в которой минимизируется ошибка формы DWt разностного сигнала. Таким образом, проезжаемое расстояние вычисляется на основе величины смещения для одномерной информации в форме сигнала, обеспечивая возможность снижения вычислительных затрат в расчете на вычисление проезжаемого расстояния.
[0059] Помимо этого, формы DWt разностных сигналов, сформированные в разные моменты времени, разделяются на множество малых областей DWt1-DWtn. Разделение на множество малых областей DWt1-DWtn таким способом дает в результате множество форм сигналов, представляющих различные местоположения на трехмерном объекте. Такая величина смещения, при которой минимизируется ошибка формы сигнала, оценивается для каждой из малых областей DWt1-DWtn, и подсчитываются величины смещения, оцениваемые для каждой из малых областей DWt1-DWtn, и создается гистограмма из них для того, чтобы вычислять проезжаемое расстояние трехмерного объекта. Таким образом, величины смещения оцениваются для различных местоположений на трехмерном объекте, и проезжаемое расстояние вычисляется на основе множества величин смещения, посредством этого обеспечивая повышенную точность при вычислении проезжаемого расстояния.
[0060] Помимо этого, взвешивание применяется ко множеству малых областей DWt1-DWtn, и величины смещения, выясненные для каждой из малых областей DWt1-DWtn, подсчитываются согласно взвешиванию, чтобы создавать гистограмму. Таким образом, взвешивание увеличивается для областей, демонстрирующих заметные характеристики, и уменьшается для областей, не демонстрирующих заметные характеристики, посредством этого обеспечивая возможность лучшего вычисления проезжаемого расстояния. Как результат, дополнительно может повышаться точность вычисления проезжаемого расстояния.
[0061] Чем больше разность между минимальными и максимальными значениями для числа пикселов, демонстрирующих предварительно определенную разность в малых областях DWt1-DWtn формы DWt разностного сигнала, тем больше взвешивание. Таким образом, взвешивание увеличивается, чем больше область демонстрирует характерные контуры и чем больше разность между максимальным и минимальным значениями, и снижается, чем более сглаженной является область. Поскольку проще точно вычислять величину смещения для областей с четко видимым контуром, чем для сглаженных областей, увеличение взвешивания в соответствии с увеличением разности между максимальным и минимальным значениями обеспечивает дополнительное повышение точности вычисления проезжаемого расстояния.
[0062] Проезжаемое расстояние трехмерного объекта вычисляется на основе максимального значения гистограммы, полученной посредством подсчета величин смещения, оцениваемых для каждой из малых областей DWt1-DWtn. Таким образом, более точное проезжаемое расстояние может быть вычислено из максимального значения, даже если существуют варьирования в величинах смещения.
[0063] Величины смещения также оцениваются для стационарных объектов, и этими величинами смещения пренебрегают, предотвращая вызванное стационарными объектами снижение точности при вычислении проезжаемого расстояния трехмерного объекта. Если при пренебрежении величинами смещения, соответствующими стационарным объектам, имеется несколько максимальных значений, вычисление проезжаемого расстояния трехмерного объекта отменяется. Это обеспечивает предотвращение ошибок при вычислении для проезжаемого расстояния, к примеру, когда имеется несколько максимальных значений.
[0064] В варианте осуществления, описанном выше, скорость рассматриваемого транспортного средства V оценивается на основе сигнала из датчика 20 скорости транспортного средства, но настоящее изобретение не ограничено такой компоновкой; например, скорость может быть оценена с использованием множества изображений, захваченных в разные моменты времени. Датчик скорости транспортного средства является необязательным в такой компоновке, обеспечивая более простую конфигурацию.
[0065] В варианте осуществления, описанном выше, текущее изображение и изображение за один момент времени до этого преобразуются в изображения вида "с высоты птичьего полета", разностное изображение PDt формируется после того, как совмещены преобразованные изображения вида "с высоты птичьего полета", и сформированное разностное изображение PDt оценивается вдоль направления сплющивания (т.е. направления, в котором сплющивается трехмерный объект, когда изображение преобразуется в изображение вида "с высоты птичьего полета"), чтобы формировать форму DWt разностного сигнала, но настоящее изобретение не ограничено такой конфигурацией. Например, также допустимо преобразовывать только изображение за один момент времени до этого в изображение вида "с высоты птичьего полета", совмещать преобразованное изображение вида "с высоты птичьего полета", затем преобразовывать изображение в один эквивалент первоначально захваченному изображению, использовать это изображение и текущее изображение для того, чтобы формировать разностное изображение, и оценивать разностное изображение вдоль направления, эквивалентного направлению сплющивания (т.е. направления, полученного посредством преобразования направления сплющивания в направление в захваченном изображении), чтобы формировать форму DWt разностного сигнала. Другими словами, при условии, что текущее изображение и изображение за один момент времени до этого совмещаются, разностное изображение PDt формируется на основе разности между двумя совмещаемыми изображениями, и разностное изображение PDt может быть оценено в направлении сплющивания трехмерного объекта после преобразования в изображение вида "с высоты птичьего полета", необязательно формировать четкое изображение вида "с высоты птичьего полета".
[0066] ОБНАРУЖЕНИЕ ТРЕХМЕРНЫХ ОБЪЕКТОВ, НА ОСНОВЕ ИНФОРМАЦИИ КРАЕВ
Далее описывается блок B обнаружения трехмерных объектов, который может активироваться вместо блока A обнаружения трехмерных объектов, показанного на фиг. 3. Блок B обнаружения трехмерных объектов обнаруживает трехмерный объект с использованием информации краев, компилированной с использованием модуля 35 вычисления яркостного различия, модуля 36 обнаружения линий краев и модуля 37 обнаружения трехмерных объектов. Фиг. 13 является иллюстрацией диапазона формирования изображений камеры 10, показанной на фиг. 3, при этом фиг. 13(a) является видом сверху, а фиг. 13(b) является видом в перспективе реального пространства позади рассматриваемого транспортного средства V. Как показано на фиг. 13(a), камера 10 имеет предварительно определенный угол a обзора и фотографирует область позади рассматриваемого транспортного средства V, заключенную в пределах предварительно определенного угла a обзора. Угол a обзора камеры 10 задается таким образом, что диапазон формирования изображений камеры 10 включает в себя смежные полосы движения, а также полосу движения, в которой движется рассматриваемое транспортное средство V, как и в случае, показанном на фиг. 2.
[0067] В настоящем примере, области A1, A2 обнаружения имеют трапецеидальные формы при просмотре сверху (т.е. в виде "с высоты птичьего полета"), и позиции, размеры и формы областей A1, A2 обнаружения оцениваются на основе расстояний d1-d4. В примере, проиллюстрированном на чертеже, области A1, A2 обнаружения не ограничены наличием трапецеидальных форм и могут иметь прямоугольные формы, как видно в виде "с высоты птичьего полета", как показано на фиг. 2.
[0068] Расстояние d1 является расстоянием от рассматриваемого транспортного средства V до линий L1, L2 контакта с землей. Линии L1, L2 контакта с землей являются линиями, в которых трехмерный объект, присутствующий в полосе движения, смежной с полосой движения, в которой движется рассматриваемое транспортное средство V, контактирует с землей. Цель настоящего варианта осуществления заключается в том, чтобы обнаруживать другие транспортные средства VX (включающие в себя двухколесные транспортные средства), движущиеся в смежных полосах движения слева и справа от полосы движения рассматриваемого транспортного средства V позади рассматриваемого транспортного средства V. Таким образом, расстояние d1, составляющее позиции линий L1, L2 контакта с землей других транспортных средств VX, может быть практически фиксированным на основе расстояния d11 от рассматриваемого транспортного средства V до белой линии W дорожной разметки и расстояния d12 от белой линии W дорожной разметки до позиции, в которой, как прогнозируется, движется другое транспортное средство VX.
[0069] Расстояние d1 не обязательно должно быть фиксированным, и также может быть переменным. В таком случае, компьютер 30 распознает позицию белой линии W дорожной разметки относительно рассматриваемого транспортного средства V с использованием распознавания линий дорожной разметки и т.п. и оценивает расстояние d11 на основе позиции распознанной белой линии W дорожной разметки. Таким образом, расстояние d1 переменно задается с использованием оцениваемого расстояния d11. В настоящем варианте осуществления, описанном далее, позиция, в которой движется другое транспортное средство VX (т.е. расстояние d12 от белой линии W дорожной разметки), и позиция, в которой движется рассматриваемое транспортное средство V (т.е. расстояние d11 от белой линии W дорожной разметки), в значительной степени является фиксированным; посредством этого расстояние d1 считается фиксированным.
[0070] Расстояние d2 является расстоянием прохождения от заднего конца рассматриваемого транспортного средства V относительно направления движения транспортного средства. Расстояние d2 задается таким образом, что, по меньшей мере, области A1, A2 обнаружения попадают в пределы угла a обзора камеры 10. В настоящем варианте осуществления, в частности, расстояние d2 задается таким образом, чтобы контактировать с диапазоном, разграниченным посредством угла a обзора. Расстояние d3 указывает длину областей A1, A2 обнаружения относительно направления движения транспортного средства. Расстояние d3 задается на основе трехмерного объекта, который должен быть обнаружен. В настоящем варианте осуществления, другое транспортное средство VX и т.п. является целью обнаружения; посредством этого расстояние d3 задается равным длине, включающей в себя другое транспортное средство VX.
[0071] Расстояние d4 указывает высоту, заданную таким образом, что она включает в себя шины другого транспортного средства VX в реальном пространстве, как показано на фиг. 13(b). Расстояние d4 в изображении при виде "с высоты птичьего полета" является длиной, показанной на фиг. 13(a). Расстояние d4 также может задаваться равным длине, не включающей в себя полосы движения, смежные со смежными полосами движения (т.е. через одну полосу движения) в изображении вида "с высоты птичьего полета". Это обусловлено тем, что когда включаются полосы движения на расстоянии через одну полосу движения от полосы движения рассматриваемого транспортного средства V, невозможно отличать, присутствует другое транспортное средство VX в смежной полосе движения либо через одну полосу движения слева или справа от полосы движения, в которой движется рассматриваемое транспортное средство V.
[0072] Расстояния d1-d4 оцениваются так, как описано выше, и эти расстояния используются для того, чтобы определять позиции, размеры и формы областей A1, A2 обнаружения. В частности, расстояние d1 используется для того, чтобы определять позицию верхних краев b1 трапециевидных областей A1, A2 обнаружения. Расстояние d2 используется для того, чтобы определять позиции C1 начальных точек верхних краев b1. Расстояние d3 используется для того, чтобы определять позиции C2 конечных точек верхних краев b1. Прямая линия L3, идущая от камеры 10 к позициям C1 начальных точек, используется для того, чтобы определять боковые края b2 трапециевидных областей A1, A2 обнаружения. Аналогично, прямая линия L4, идущая от камеры 10 к позициям C2 конечных точек, используется для того, чтобы определять боковые края b4 трапециевидных областей A1, A2 обнаружения. Расстояние d4 используется для того, чтобы определять нижние края b4 трапециевидных областей A1, A2 обнаружения. Область, окруженная посредством краев b1-b4 таким способом, представляет собой области A1, A2 обнаружения. Как показано на фиг. 13(b), области A1, A2 обнаружения являются квадратами (прямоугольниками) в реальном пространстве позади рассматриваемого транспортного средства V.
[0073] Возвращаясь к фиг. 3, захваченные данные изображений для предварительно определенной области, фотографируемой посредством камеры 10, вводятся в модуль 31 преобразования точки обзора. Модуль 31 преобразования точки обзора выполняет процесс преобразования точки обзора для введенных захваченных данных изображений, который преобразует данные в данные изображений вида "с высоты птичьего полета", показывающие вид "с высоты птичьего полета". Здесь, "вид с высоты птичьего полета" означает вид с точки обзора, например, воображаемой камеры, смотрящей прямо вниз (или немного по диагонали вниз) сверху. Процесс преобразования точки обзора может осуществляться с использованием, например, технологии, раскрытой в выложенной заявке на патент Японии № 2008-219063.
[0074] Чтобы обнаруживать края трехмерного объекта, включенного в изображение вида "с высоты птичьего полета", модуль 35 вычисления яркостного различия вычисляет яркостное различие для данных изображений вида "с высоты птичьего полета", полученных через преобразование точки обзора, выполняемое посредством модуля 31 преобразования точки обзора. Модуль 35 вычисления яркостного различия вычисляет яркостное различие между двумя пикселами около каждой из нескольких позиций вдоль вертикальной воображаемой линии, идущей в вертикальном направлении в реальном пространстве. Модуль 35 вычисления яркостного различия может вычислять яркостное различие посредством задания одной вертикальной воображаемой линии, идущей в вертикальном направлении в реальном пространстве, либо посредством задания двух вертикальных воображаемых линий, идущих в вертикальном направлении в реальном пространстве.
[0075] Ниже описывается конкретный способ задания двух вертикальных воображаемых линий. Модуль 35 вычисления яркостного различия задает первую вертикальную воображаемую линию, соответствующую сегменту линии, идущему в вертикальном направлении в реальном пространстве, и вторую вертикальную воображаемую линию, соответствующую сегменту линии, отличающемуся от первой вертикальной воображаемой линии, которая идет вертикально в реальном пространстве для подвергнутого преобразованию точки обзора изображения вида "с высоты птичьего полета". Модуль 35 вычисления яркостного различия оценивает яркостное различие между точками на первой вертикальной воображаемой линии и точками на второй вертикальной воображаемой линии, непрерывно вдоль первой вертикальной воображаемой линии и второй вертикальной воображаемой линии. Далее подробно описывается работа модуля 35 вычисления яркостного различия.
[0076] Как показано на фиг. 14(a), модуль 35 вычисления яркостного различия задает первую вертикальную воображаемую линию La (далее, "линию La концентрации внимания"), которая соответствует сегменту линии, идущему в вертикальном направлении в реальном пространстве, и проходит через область A1 обнаружения. Модуль 35 вычисления яркостного различия также задает вторую вертикальную воображаемую линию Lr (далее, "опорную линию Lr"), отличающуюся от линии La концентрации внимания, соответствует сегменту линии, идущему в вертикальном направлении в реальном пространстве, и проходит через область A1 обнаружения. Опорная линия Lr задается в позиции, отделенной от линии La концентрации внимания на предварительно определенное расстояние в реальном пространстве. Линии, соответствующие сегментам линии, идущим в вертикальном направлении в реальном пространстве, являются линиями, веерообразно расходящимися наружу из позиции Ps камеры 10 в изображении вида "с высоты птичьего полета". Эти веерообразно расходящиеся наружу линии идут в направлении сплющивания трехмерного объекта при преобразовании в вид "с высоты птичьего полета".
[0077] Модуль 35 вычисления яркостного различия задает точку Pa концентрации внимания (точку на первой вертикальной воображаемой линии) на линии La концентрации внимания. Модуль 35 вычисления яркостного различия также задает опорную точку Pr (точку на второй вертикальной воображаемой линии) на опорной линии Lr. Линия La концентрации внимания, точка Pa концентрации внимания, опорная линия Lr и опорная точка Pr имеют взаимосвязь, показанную на фиг. 14(b), в реальном пространстве. Как очевидно из фиг. 14(b), линия La концентрации внимания и опорная линия Lr идут вертикально в реальном пространстве, и точка Pa концентрации внимания и опорная точка Pr задаются практически на идентичной высоте в реальном пространстве. Точка Pa концентрации внимания и опорная точка Pr не обязательно должны быть строго на идентичной высоте; определенная величина отклонения является допустимой до такой степени, что точка Pa концентрации внимания и опорная точка Pr могут считаться находящимися на идентичной высоте.
[0078] Модуль 35 вычисления яркостного различия вычисляет яркостное различие между точкой Pa концентрации внимания и опорной точкой Pr. Если существует большое яркостное различие между точкой Pa концентрации внимания и опорной точкой Pr, считается, что край присутствует между точкой Pa концентрации внимания и опорной точкой Pr. Таким образом, модуль 36 обнаружения линий краев, показанный на фиг. 3, обнаруживает линии краев на основе яркостного различия между точкой Pa концентрации внимания и опорной точкой Pr.
[0079] Ниже подробно поясняется этот аспект. Фиг. 15 является иллюстрацией конкретной работы модуля 35 вычисления яркостного различия, при этом фиг. 15(a) является изображением вида "с высоты птичьего полета", показывающим вид "с высоты птичьего полета", а фиг. 15(b) является укрупненным видом секции B1 в изображении вида "с высоты птичьего полета", показанном на фиг. 15(a). Только область A1 обнаружения проиллюстрирована и описана на фиг. 15, но яркостное различие также вычисляется в области A2 обнаружения согласно аналогичной процедуре.
[0080] Когда другое транспортное средство VX показывается в захваченном изображении, захваченном посредством камеры 10, другое транспортное средство VX появляется в области A1 обнаружения в изображении вида "с высоты птичьего полета", как проиллюстрировано на фиг. 15(a). Допустим, что линия La концентрации внимания задается на части резины шины другого транспортного средства VX в изображении вида "с высоты птичьего полета", как показано в укрупненном виде секции B1 из фиг. 15(a) на фиг. 15(b). В этом состоянии, модуль 35 вычисления яркостного различия сначала задает опорную линию Lr. Опорная линия Lr задается вдоль вертикального направления в позиции, отстоящей на предварительно определенное расстояние от линии La концентрации внимания в реальном пространстве. В частности, в устройстве 1 обнаружения трехмерных объектов согласно настоящему варианту осуществления, опорная линия Lr задается в позиции на расстоянии 10 см от линии La концентрации внимания в реальном пространстве. Как результат, опорная линия Lr задается, например, на колесе шины других транспортных средств VX на расстоянии в 10 см от резины шины другого транспортного средства VX в изображении вида "с высоты птичьего полета".
[0081] Затем модуль 35 вычисления яркостного различия задает множество точек Pa1-PaN концентрации внимания на линии La концентрации внимания. На фиг. 15(b), для удобства иллюстрации задаются шесть точек Pa1-Pa6 концентрации внимания (далее, произвольно выбранная точка называется "точка Pai концентрации внимания".) Любое число точек Pa концентрации внимания может задаваться на линии La концентрации внимания. Нижеприведенное описание предполагает, что N точек Pa концентрации внимания задаются на линии La концентрации внимания.
[0082] Затем, модуль 35 вычисления яркостного различия задает опорные точки Pr1-PrN на высоте в реальном пространстве, идентичной высоте в реальном пространстве точек Pa1-PaN концентрации внимания. Модуль 35 вычисления яркостного различия после этого вычисляет яркостное различие между точками Pa концентрации внимания и опорными точками Pr на идентичной высоте. Таким образом, модуль 35 вычисления яркостного различия вычисляет яркостное различие между двумя пикселами во множестве позиций (1-N) вдоль вертикальной воображаемой линии, идущей в вертикальном направлении в реальном пространстве. Например, модуль 35 вычисления яркостного различия вычисляет яркостное различие между первой точкой Pa1 концентрации внимания и первой опорной точкой Pr1 и яркостное различие между второй точкой Pa2 концентрации внимания и второй опорной точкой Pr2. Модуль 35 вычисления яркостного различия непрерывно вычисляет яркостные различия вдоль линии La концентрации внимания и опорной линии Lr. Другими словами, модуль 35 вычисления яркостного различия вычисляет яркостные различия по порядку между третьей-N-ной точками Pa3-PaN концентрации внимания и третьей-N-ной опорными точками Pr3-PrN.
[0083] Модуль 35 вычисления яркостного различия многократно выполняет этот процесс задания опорной линии Lr, задания точек Pa концентрации внимания и опорных точек Pr и вычисления яркостных различий при сдвиге линии La концентрации внимания в области A1 обнаружения. В частности, модуль 35 вычисления яркостного различия многократно выполняет процесс, описанный выше, при сдвиге позиций линии La концентрации внимания и опорной линии Lr на идентичное расстояние в направлении, в котором идет линия L1 контакта с землей в реальном пространстве. Например, модуль 35 вычисления яркостного различия задает линию, которая представляет собой опорную линию Lr в предыдущем процессе, в качестве линии La концентрации внимания, задает опорную линию Lr для этой линии La концентрации внимания и вычисляет яркостное различие.
[0084] Возвращаясь к фиг. 3, модуль 36 обнаружения линий краев обнаруживает линии краев на основе непрерывного яркостного различия, вычисленного посредством модуля 35 вычисления яркостного различия. Например, в случае, показанном на фиг. 15(b), первая точка Pa1 концентрации внимания и первая опорная точка Pr1 размещаются в идентичной части шины и посредством этого имеют низкое яркостное различие. Между этим вторая-шестая точки Pa2-Pa6 концентрации внимания размещаются в резиновой части шины, и вторая-шестая опорные точки Pr2-Pr6 размещаются в части колеса шины. Таким образом, имеется большее яркостное различие между второй-шестой точками Pa2-Pa6 концентрации внимания и второй-шестой опорными точками Pr2-Pr6. Модуль 36 обнаружения линий краев посредством этого допускает обнаружение присутствия линии края между второй-шестой точками Pa2-Pa6 концентрации внимания и второй-шестой опорными точками Pr2-Pr6, которые имеют высокое яркостное различие.
[0085] В частности, для того чтобы обнаруживать линию края, модуль 36 обнаружения линий краев сначала назначает атрибуты i-ой точке Pai концентрации внимания на основе яркостного различия между i-ой точкой Pai концентрации внимания (координаты (xi, yi)) и i-ой опорной точкой Pri (координаты (xi′, yi′)) согласно следующей числовой формуле 1.
Числовая формула 1
Когда I(xi, yi)>I(xi′, yi′)+t:
s(xi, yi)=1
Когда I(xi, yi)<I(xi′, yi′)-t:
s(xi, yi)=-1.В других случаях:
s(xi, yi)=0
[0086] В числовой формуле 1, t указывает пороговое значение, I(xi, yi) указывает значение яркости для i-ой точки Pai концентрации внимания, и I(xi′, yi′) указывает значение яркости для i-ой опорной точки Pri. Согласно числовой формуле 1, если значение яркости для точки Pai концентрации внимания превышает значение яркости, полученное посредством прибавления порогового значения t к опорной точке Pri, атрибут s(xi, yi) для точки Pai концентрации внимания равен 1. Между тем, если значение яркости для точки Pai концентрации внимания меньше значения яркости, предоставляемого в результате посредством вычитания порогового значения t из опорной точки Pri, атрибут s(xi, yi) для точки Pai концентрации внимания равен -1. Для других взаимосвязей между значением яркости точки Pai концентрации внимания и значением яркости опорной точки Pri, атрибут s(xi, yi) точки Pai концентрации внимания равен 0. Пороговое значение t предварительно установлено и может быть изменено согласно команде управления, выданной посредством контроллера 39, показанного на фиг. 3. Далее описываются подробности этого процесса.
[0087] Затем модуль 36 обнаружения линий краев оценивает, является или нет линия La концентрации внимания линией края, на основе неразрывности c(xi, yi) атрибута s вдоль линии La концентрации внимания на основе следующей числовой формулы 2.
Числовая формула 2
Когда s(xi, yi)=s(xi+1, yi+1) (за исключением 0=0);
c(xi, yi)=1.
В других случаях:
c(xi, yi)=0.
[0088] Когда атрибут s(xi, yi) точки Pai концентрации внимания и атрибут s(xi+1, yi+1) смежной точки Pai+1 концентрации внимания являются идентичными, неразрывность c(xi, yi) равна 1. Когда атрибут s(xi, yi) точки Pai концентрации внимания и атрибут s(xi+1, yi+1) смежной точки Pai+1 концентрации внимания не являются идентичными, неразрывность c(xi, yi) равна 0.
[0089] Затем модуль 36 обнаружения линий краев выясняет сумму неразрывности c для всех точек Pa концентрации внимания на линии La концентрации внимания. Модуль 36 обнаружения линий краев нормализует неразрывность c посредством деления вычисленной суммы для неразрывности c на число N точек Pa концентрации внимания. Если нормализованное значение превышает пороговое значение θ, модуль 36 обнаружения линий краев идентифицирует линию La концентрации внимания в качестве линии края. Пороговое значение θ предварительно определяется через экспериментирование. Пороговое значение θ может быть предварительно установлено или может быть изменено согласно команде управления, выданной посредством контроллера 39 согласно результатам оценки из модуля 38 оценки состояния линзы, как описано далее.
[0090] В частности, модуль 36 обнаружения линий краев оценивает, является или нет линия La концентрации внимания линией края, согласно следующей числовой формуле 3. Модуль 36 обнаружения линий краев затем оценивает, является или нет линия La концентрации внимания линией края для всех линий La концентрации внимания, нарисованных в области A1 обнаружения.
Числовая формула 3
Σc(xi, yi)/N>θ.
[0091] Возвращаясь к фиг. 3, модуль 37 обнаружения трехмерных объектов обнаруживает трехмерный объект на основе количества линий краев, обнаруженных посредством модуля 36 обнаружения линий краев. Как описано выше, устройство 1 обнаружения трехмерных объектов согласно настоящему варианту осуществления обнаруживает линии краев, идущие в вертикальном направлении в реальном пространстве. Если обнаруживается множество линий краев, идущих в вертикальном направлении, имеется высокая вероятность того, что трехмерный объект присутствует в областях A1, A2 обнаружения. Модуль 37 обнаружения трехмерных объектов посредством этого обнаруживает трехмерный объект на основе количества линий краев, обнаруженных посредством модуля 36 обнаружения линий краев. Перед обнаружением трехмерного объекта модуль 37 обнаружения трехмерных объектов оценивает, являются или нет линии краев, обнаруженные посредством модуля 36 обнаружения линий краев, корректными. Модуль 37 обнаружения трехмерных объектов оценивает, превышает или нет варьирование в яркости вдоль линии края в изображении вида "с высоты птичьего полета" предварительно определенное пороговое значение. Если варьирование в яркости вдоль линии края в изображении вида "с высоты птичьего полета" превышает пороговое значение, линия края определяется как обнаруженная в результате ошибочной оценки. Между тем, если варьирование в яркости вдоль линии края в изображении вида "с высоты птичьего полета" не превышает пороговое значение, линия края оценивается как корректная. Пороговое значение предварительно установлено через экспериментирование и т.п.
[0092] Фиг. 16 показывает распределения яркости линии края, при этом фиг. 16(a) показывает линию края и распределение яркости, когда другое транспортное средство VX присутствует в области A1 обнаружения в качестве трехмерного объекта, а фиг. 16(b) показывает линию края и распределение яркости, когда трехмерный объект не присутствует в области A1 обнаружения.
[0093] Допустим что линия La концентрации внимания, заданная в резиновой части шины другого транспортного средства VX в изображении вида "с высоты птичьего полета" идентифицирована в качестве линии края, как показано на фиг. 16(a). В этом случае, имеется пологое варьирование в яркости вдоль линии La концентрации внимания в изображении вида "с высоты птичьего полета". Это обусловлено укрупнением шины другого транспортного средства VX в изображении вида "с высоты птичьего полета" в результате подвергания преобразованию точки обзора изображения, захваченного посредством камеры 10, в изображение вида "с высоты птичьего полета". Между тем, допустим, что линия La концентрации внимания, заданная на белой секции текстовых данных "50", нарисованных на поверхности дороги в изображении вида "с высоты птичьего полета", некорректно идентифицирована в качестве линии края, как показано на фиг. 16(b). В этом случае, существует явное выделяемое варьирование в яркости вдоль линии La концентрации внимания в изображении вида "с высоты птичьего полета". Это обусловлено наличием сочетания областей с высокой яркостью, соответствующих белой надписи, и областей с низкой яркостью, соответствующих поверхности дороги, на линии края.
[0094] На основе разностей в распределении яркости вдоль линии La концентрации внимания, как описано выше, модуль 37 обнаружения трехмерных объектов оценивает, некорректно идентифицирована или нет линия края. Если варьирование в яркости вдоль линии края превышает предварительно определенное пороговое значение, модуль 37 обнаружения трехмерных объектов оценивает то, что линия края обнаружена в результате ошибочной оценки. Рассматриваемая линия края посредством этого не используется для того, чтобы обнаруживать трехмерные объекты. Это обеспечивает возможность минимизации в случаях, в которых белый текст, такой как "50" на поверхности дороги, либо трава на обочине дороги идентифицируется в качестве линии края, что приводит к снижению точности обнаружения трехмерных объектов.
[0095] В частности, модуль 37 обнаружения трехмерных объектов вычисляет варьирование в яркости вдоль линии края с использованием одной из следующих числовых формул 4 и 5. Варьирование в яркости вдоль линии края является эквивалентным значению оценки в вертикальном направлении в реальном пространстве. Следующая формула 4 оценивает распределение яркости с использованием суммы квадратов разностей между i-ыми значениями I(xi, yi) яркости и смежным (i+1)-вым значением I(xi+1, yi+1) яркости на линии La концентрации внимания. Следующая формула 5 оценивает распределение яркости с использованием суммы абсолютных значений разностей между i-ыми значениями I(xi, yi) яркости и смежным (i+1)-вым значением I(xi+1, yi+1) яркости на линии La концентрации внимания.
Числовая формула 4
Значение оценки для вертикального эквивалентного направления =Σ [{I(xi, yi)-I(xi+1, yi+1)}2].
Числовая формула 5
Значение оценки для вертикального эквивалентного направления =Σ|I(xi, yi)-I(xi+1, yi+1)|
[0096] Изобретение не ограничено числовой формулой 5; например, как показано в следующей числовой формуле 6, пороговое значение t2 может быть использовано для того, чтобы преобразовывать в двоичную форму атрибут b смежного значения яркости, затем выяснять сумму преобразованных в двоичную форму атрибутов b для всех точек Pa концентрации внимания.
Числовая формула 6
Значение оценки для вертикального эквивалентного направления =Σb(xi, yi).
Когда |I(xi, yi)-I(xi+1, yi+1)|>t2;
b(xi, yi)=1.
В других случаях:
b(xi, yi)=0.
[0097] Когда абсолютное значение яркостного различия между значением яркости точки Pai концентрации внимания и значением яркости опорной точки Pri превышает пороговое значение t2, атрибут b(xi, yi) точки Pa концентрации внимания (xi, yi) равен 1. Для других взаимосвязей, атрибут b(xi, yi) точки Pai концентрации внимания равен 0. Пороговое значение t2 экспериментально предварительно задано таким образом, чтобы подтверждать то, что линия La концентрации внимания не находится на идентичном трехмерном объекте. Модуль 37 обнаружения трехмерных объектов выясняет сумму атрибутов b для всех точек Pa концентрации внимания на линии La концентрации внимания, вычисляет значение оценки в вертикальном эквивалентном направлении и оценивает, является или нет линия края корректной.
[0098] Далее описывается способ обнаружения трехмерных объектов на основе информации краев согласно настоящему варианту осуществления. Фиг. 17 и 18 показывает блок-схему последовательности операций способа, иллюстрирующую подробности способа обнаружения трехмерных объектов согласно настоящему варианту осуществления. Для удобства фиг. 17 и 18 иллюстрируют выполнение процесса для области A1 обнаружения, но аналогичный процесс также выполняется для области A2 обнаружения.
[0099] Как показано на фиг. 17, камера 10 сначала фотографирует предварительно определенную область, оцениваемую посредством ее угла a обзора и позиции присоединения, на этапе S21. Затем на этапе S22 данные для изображения, фотографируемого посредством камеры 10 на этапе S21, вводятся в модуль 31 преобразования точки обзора, и данные изображений вида "с высоты птичьего полета" формируются через преобразование точки обзора.
[0100] Затем на этапе S23 модуль 35 вычисления яркостного различия задает линию La концентрации внимания в области A1 обнаружения. Для этого модуль 35 вычисления яркостного различия задает линию, эквивалентную линии, идущей в вертикальном направлении в реальном пространстве, в качестве линии La концентрации внимания. Затем на этапе S24 модуль 35 вычисления яркостного различия задает опорную линию Lr в области A1 обнаружения. Для этого модуль 35 вычисления яркостного различия задает линию, которая является эквивалентной сегменту линии, идущему в вертикальном направлении в реальном пространстве, и отделяется от линии La концентрации внимания на предварительно определенное расстояние в реальном пространстве в качестве опорной линии Lr.
[0101] Затем на этапе S25 модуль 35 вычисления яркостного различия задает множество точек Pa концентрации внимания на линии La концентрации внимания. В ходе этого процесса, модуль 35 вычисления яркостного различия задает число точек Pa концентрации внимания, которое не представляет собой проблему, когда модуль 36 обнаружения линий краев выполняет обнаружение краев. На этапе S26 модуль 35 вычисления яркостного различия задает опорные точки Pr таким образом, что точки Pa концентрации внимания и опорные точки Pr находятся практически на идентичной высоте в реальном пространстве. Как результат, точки Pa концентрации внимания и опорные точки Pr являются практически совмещенными в горизонтальном направлении, упрощая обнаружение линий краев, идущих в вертикальном направлении в реальном пространстве.
[0102] Затем на этапе S27 модуль 35 вычисления яркостного различия вычисляет яркостное различие между точками Pa концентрации внимания и опорными точками Pr на идентичной высоте в реальном пространстве. Затем, модуль 36 обнаружения линий краев вычисляет атрибут s для каждой точки Pa концентрации внимания согласно вышеприведенной числовой формуле 1. Затем на этапе S28 модуль 36 обнаружения линий краев вычисляет неразрывность c атрибута s для каждой точки Pa концентрации внимания согласно вышеприведенной числовой формуле 2. Затем на этапе S29 модуль 36 обнаружения линий краев оценивает, превышает или нет нормализованная сумма для неразрывности пороговое значение θ, согласно вышеприведенной числовой формуле 2. Если выяснено, что нормализованное значение превышает пороговое значение θ (S29: "Да"), модуль 36 обнаружения линий краев обнаруживает рассматриваемую линию La концентрации внимания в качестве линии края на этапе S30. Затем процесс переходит к этапу S31. Если выяснено, что нормализованное значение не превышает пороговое значение θ (S29: "Нет"), модуль 36 обнаружения линий краев не обнаруживает рассматриваемую линию La концентрации внимания в качестве линии края, а переходит к этапу S31. Пороговое значение θ может задаваться заранее, но также может быть изменено согласно команде управления из контроллера 39.
[0103] На этапе S31 компьютер 30 оценивает, выполнен или нет процесс, изложенный на этапах S23-S30, для всех задаваемых линий La концентрации внимания в области A1 обнаружения. Если выяснено, что процесс не выполнен для всех линий La концентрации внимания (S31: "Нет"), процесс возвращается к этапу S23, новая линия La концентрации внимания задается, и процесс повторяется до этапа S31. Между тем, если выяснено, что процесс, описанный выше, выполнен для всех линий La концентрации внимания (S31: "Да"), процесс переходит к этапу S32 по фиг. 18.
[0104] На этапе S32 на фиг. 18, модуль 37 обнаружения трехмерных объектов вычисляет варьирование в яркости вдоль линии края для линии края, обнаруженной на этапе S30 на фиг. 17. Модуль 37 обнаружения трехмерных объектов вычисляет варьирование в яркости линии края согласно одной из числовых формул 4, 5 и 6, описанных выше. Затем на этапе S33 модуль 37 обнаружения трехмерных объектов удаляет все линии краев, имеющие варьирование в яркости, которая превышает предварительно определенное пороговое значение. Другими словами, линии краев, имеющие большое варьирование в яркости, оцениваются как некорректные линии краев и не используются для того, чтобы обнаруживать трехмерные объекты. Это служит для того, чтобы предотвращать обнаружение текста на поверхности дороги или травы на обочине дороги в области A1 обнаружения в качестве линии края, как пояснено выше. Таким образом, предварительно определенное пороговое значение задается равным значению, оцениваемому заранее через экспериментирование и т.п., на основе варьирования в яркости, обусловленной посредством текста на поверхности дороги, травы на обочине дороги и т.п.
[0105] Затем на этапе S34 модуль 37 обнаружения трехмерных объектов оценивает, равно или превышает либо нет количество линий краев второе пороговое значение β. Второе пороговое значение β оценивается и предварительно задается через экспериментирование и может быть изменено согласно команде управления, выданной посредством контроллера 39, показанного на фиг. 3. Далее описываются подробности этого процесса. Например, когда трехмерный объект, который должен быть обнаружен, задается как четырехколесные транспортные средства, второе пороговое значение β предварительно установлено через экспериментирование согласно числу линий краев, принадлежащих четырехколесному транспортному средству, появляющемуся в области A1 обнаружения. Если выяснено, что количество линий краев равно или превышает второе пороговое значение β (S34: "Да"), и трехмерный объект непрерывно обнаруживается посредством модуля 33 обнаружения трехмерных объектов в течение предварительно определенной продолжительности T или более (S35: "Да"), модуль 37 обнаружения трехмерных объектов обнаруживает то, что присутствует трехмерный объект в области A1 обнаружения, на этапе S36 (S36). Между тем, если выяснено, что количество линий краев не равно или превышает второе пороговое значение β (S34: "Нет"), или трехмерный объект непрерывно не обнаруживается посредством модуля 33 обнаружения трехмерных объектов в течение предварительно определенной продолжительности T или более (S35: "Нет"), модуль 37 обнаружения трехмерных объектов выясняет, что трехмерный объект не присутствует в области A1 обнаружения (S37). Второе пороговое значение β может задаваться заранее, но также может быть изменено согласно команде управления из контроллера 39. Все обнаруженные трехмерные объекты могут определяться как другие транспортные средства VX, движущиеся в смежной полосе движения рядом с полосой движения, в которой рассматриваемое транспортное средство V, либо относительная скорость обнаруженного трехмерного объекта относительно рассматриваемого транспортного средства V может рассматриваться как характеристика других транспортных средств VX, чтобы определять, является или нет объект другим транспортным средством VX, движущимся в смежной полосе движения.
[0106] В соответствии со способом обнаружения трехмерных объектов на основе информации краев согласно настоящему варианту осуществления, как пояснено выше, вертикальные воображаемые линии задаются в изображении вида "с высоты птичьего полета" в качестве сегментов линии, идущих в вертикальном направлении в реальном пространстве, чтобы обнаруживать трехмерные объекты, присутствующие в областях A1, A2 обнаружения. Затем может вычисляться яркостное различие между двумя пикселами около нескольких позиций вдоль вертикальных воображаемых линий, чтобы определять, присутствует или нет трехмерный объект, на основе неразрывности яркостного различия.
[0107] В частности, линия La концентрации внимания, соответствующая сегменту линии, идущему в вертикальном направлении в реальном пространстве, и опорная линия Lr, отличающаяся от линии La концентрации внимания, задаются в областях A1, A2 обнаружения в изображении вида "с высоты птичьего полета". Яркостное различие между точками Pa концентрации внимания на линии La концентрации внимания и опорными точками Pr на опорной линии Lr непрерывно выясняется вдоль линии La концентрации внимания и опорной линии Lr. Таким образом, яркостное различие между линией La концентрации внимания и опорной линией Lr выясняется посредством непрерывного выяснения яркостного различия между точками. Если существует высокое яркостное различие между линией La концентрации внимания и опорной линией Lr, имеется высокая вероятность присутствия края трехмерного объекта в местоположении, в котором задается линия La концентрации внимания. Таким образом, можно обнаруживать трехмерный объект на основе непрерывного яркостного различия. В частности, отсутствует влияние на процесс обнаружения трехмерных объектов, даже если трехмерный объект укрупняется согласно своему расстоянию от поверхности дороги в результате преобразования в изображение вида "с высоты птичьего полета", чтобы сравнивать отношение яркостей между вертикальными воображаемыми линиями, идущими в вертикальном направлении в реальном пространстве. Таким образом, в соответствии со способом настоящего примера, может повышаться точность обнаружения трехмерных объектов.
[0108] В настоящем примере выясняется яркостное различие между двумя точками с практически идентичной высотой около вертикальной воображаемой линии. В частности, выясняется яркостное различие между точкой Pa концентрации внимания на линии La концентрации внимания и опорной точкой Pr на опорной линии Lr практически на идентичной высоте в реальном пространстве, обеспечивая возможность четкого обнаружения яркостных различий, если присутствует край, идущий в вертикальном направлении.
[0109] Помимо этого, в настоящем примере можно назначать атрибуты точкам Pa концентрации внимания на основе яркостного различия между точками Pa концентрации внимания на линии La концентрации внимания и опорными точками Pr на опорной линии Lr, определять, является или нет рассматриваемая линия La концентрации внимания линией края, на основе того, имеется или нет неразрывность c атрибутов вдоль линии La концентрации внимания, и обнаруживать границы между областями высокой яркости и областями низкой яркости в качестве линий краев, обеспечивая возможность обнаружения краев как естественно воспринимаемых людьми. Ниже подробно описывается это преимущество. Фиг. 19 является иллюстрацией примерного изображения для пояснения процесса, выполняемого посредством модуля 36 обнаружения линий краев. Примерное изображение содержит первый полосковый шаблон 101 или повторяющиеся области высокой яркости и области низкой яркости и смежный второй полосковый шаблон 102 из повторяющихся областей низкой яркости и областей высокой яркости. В настоящем примерном изображении, области высокой яркости в первом полосковом шаблоне 101 и области низкой яркости во втором полосковом шаблоне 102 являются смежными, и области низкой яркости в первом полосковом шаблоне 101 и области высокой яркости во втором полосковом шаблоне 102 являются смежными. Местоположение 103, размещаемое на границе между первым полосковым шаблоном 101 и вторым полосковым шаблоном 102, зачастую не воспринимается людьми в качестве края.
[0110] В отличие от этого, поскольку области низкой яркости и области высокой яркости являются смежными, местоположение 103 воспринимается как край, если края обнаруживаются только с использованием яркостных различий. Тем не менее, поскольку модуль 36 обнаружения линий краев идентифицирует местоположение 103 в качестве линии края только тогда, когда, в дополнение к яркостному различию в местоположении 103, существует неразрывность в атрибуте яркостного различия, могут предотвращаться ошибочные идентификации местоположений 103, которые не воспринимаются человеком, в качестве линий краев посредством модуля 36 обнаружения линий краев, обеспечивая возможность обнаружения краев, которые являются естественными с точки зрения человеческого восприятия.
[0111] В настоящем примере, если варьирование в яркости линии края, обнаруженной посредством модуля 36 обнаружения линий краев, превышает предварительно определенное пороговое значение, линия края определяется как обнаруженная в результате некорректной идентификации. Когда захваченное изображение, полученное посредством камеры 10, преобразуется в изображение вида "с высоты птичьего полета", трехмерный объект в захваченном изображении зачастую появляется в укрупненном состоянии в изображении вида "с высоты птичьего полета". Например, если шина другого транспортного средства VX укрупняется, как описано выше, укрупняется одно местоположение, а именно, шина, что приводит к тенденции низкого варьирования в яркости в изображении вида "с высоты птичьего полета" в направлении укрупнения. В отличие от этого, если текст и т.п., нарисованный на поверхности дороги, некорректно идентифицируется в качестве линии края, сочетание области высокой яркости в форме текста и области низкой яркости в форме поверхности дороги появляется в изображении вида "с высоты птичьего полета". В этом случае, варьирование в яркости в изображении вида "с высоты птичьего полета" в направлении укрупнения зачастую больше. Таким образом, посредством идентификации варьирований в яркости вдоль линии края в изображении вида "с высоты птичьего полета", как указано в настоящем примере, могут распознаваться линии краев, обнаруженные в результате некорректной идентификации, обеспечивая повышенную точность обнаружения трехмерных объектов.
[0112] КОНЕЧНАЯ ОЦЕНКА ТРЕХМЕРНЫХ ОБЪЕКТОВ
Возвращаясь к фиг. 3, устройство 1 обнаружения трехмерных объектов настоящего примера содержит два модуля 33 обнаружения трехмерных объектов (или модуля 37 обнаружения трехмерных объектов), описанные выше, модуль 34 оценки трехмерных объектов, модуль 38 оценки состояния линзы и контроллер 39. Модуль 34 оценки трехмерных объектов выполняет конечную оценку того, является или нет обнаруженный трехмерный объект другим транспортным средством VX, присутствующим в областях A1, A2 обнаружения, на основе результатов, обнаруженных посредством модуля 33 обнаружения трехмерных объектов (или модуля 37 обнаружения трехмерных объектов). Модуль 33 обнаружения трехмерных объектов (или модуль 37 обнаружения трехмерных объектов) и модуль 34 оценки трехмерных объектов обнаруживают трехмерный объект, отражающий результаты оценки из модуля 38 оценки состояния линзы, согласно командам из контроллера 39.
[0113] Ниже описывается модуль 34 оценки трехмерных объектов. Модуль 34 оценки трехмерных объектов настоящего варианта осуществления выполняет конечную оценку того, является или нет трехмерный объект, обнаруженный посредством модулей 33, 37 обнаружения трехмерных объектов, другим транспортным средством VX, присутствующим в областях A1, A2 обнаружения. В частности, модуль 34 оценки трехмерных объектов выясняет, что трехмерный объект является другим транспортным средством VX, присутствующее в областях A1, A2 обнаружения, если результаты обнаружения трехмерных объектов, предоставляемые в результате посредством модулей 33, 37 обнаружения трехмерных объектов, остаются в течение предварительно определенной продолжительности T. Хотя в любом случае отсутствуют конкретные ограничения, модуль 34 оценки трехмерных объектов может выполнять конечную оценку того, является или нет трехмерный объект другим транспортным средством VX, присутствующее в областях A1, A2 обнаружения, если число пиков, пиковые значения, скорость движения и т.п. формы разностного сигнала, извлеченной из информации формы разностного сигнала, находятся в предварительно определенных диапазонах значений, и это состояние остается в течение предварительно определенной продолжительности или более, или выполнять конечную оценку того, является или нет трехмерный объект другим транспортным средством VX, присутствующее в областях A1, A2 обнаружения, если неразрывность, нормализованная сумма, количество линий краев и т.п. для края, извлеченного из информации краев, находятся в предварительно определенных диапазонах значений, и это состояние остается в течение предварительно определенной продолжительности или более.
[0114] Когда трехмерный объект, обнаруженный посредством модулей 33 или 37 обнаружения трехмерных объектов, непрерывно обнаруживается в течение, по меньшей мере, предварительно определенной продолжительности или более, модуль 34 оценки трехмерных объектов настоящего варианта осуществления оценивает то, что трехмерный объект является другим транспортным средством VX, присутствующее в правосторонней области обнаружения или в левосторонней области обнаружения.
[0115] Когда выяснено, что обнаруженный трехмерный объект является другим транспортным средством VX, присутствующее в областях A1, A2 обнаружения, модуль 34 оценки трехмерных объектов выполняет такой процесс, как уведомление пассажира. Модуль 34 оценки трехмерных объектов допускает остановку идентификации обнаруженных трехмерных объектов в качестве других транспортных средств VX согласно командам управления из контроллера 39. Контроллер 39 формирует команды управления согласно результатам оценки, предоставляемым в результате посредством модуля 38 оценки состояния линзы.
[0116] Далее описывается модуль 38 оценки состояния линзы. Модуль 38 оценки состояния линзы настоящего варианта осуществления оценивает, находится или нет линза 11 в предварительно установленном состоянии, подлежащем управлению, на основе конкретных действий, захваченных на этапе очистки линзы, выполняемом посредством устройства 100 для очистки линзы.
[0117] Другими словами, модуль 38 оценки состояния линзы настоящего варианта осуществления оценивает состояние линзы 11, когда очистка выполнена посредством устройства 100 для очистки линзы с использованием очищающей жидкости. Это обусловлено тем, что очищающая жидкость прилипает к линзе 11, когда линза 11 очищается с помощью очищающей жидкости, что влияет на захваченное изображение. Фиг. 20 показывает один пример информации K изображений, полученной, когда линза 11 очищается. Как показано на фиг. 20, когда очищающая жидкость прилипает к линзе 11 в результате очистки, изображение очищающей жидкости появляется в информации изображений, захватываемой через линзу 11. Изображение, наблюдаемое в нижней части по фиг. 20, представляет собой изображение номерного знака LP, и затемненная секция в верхней части представляет собой кожух C камеры 10. Информация K изображений для области между номерным знаком LP и кожухом C постоянно изменяется по мере того, как движется рассматриваемое транспортное средство V. Информация K изображений включает в себя изображение поверхности RD дороги, на которой движется рассматриваемое транспортное средство V, и изображение неба SK, расходящееся назад по поверхности RD дороги. Информация K изображений, показанная на фиг. 20, показывает изображение очищающей жидкости W, прилипающей к линзе 11.
[0118] Когда процесс преобразования изображений выполняется с использованием информации K изображений, захваченной через линзу 11 с очищающей жидкостью W, прилипающей к ней, как показано на фиг. 20, извлеченная информация формы разностного сигнала или информация краев отражает изображение W очищающей жидкости. Если информация формы разностного сигнала или информация краев вычисляется с использованием такой информации изображений, и процесс обнаружения трехмерных объектов выполняется согласно способам, описанным выше, изображение W очищающей жидкости может некорректно восприниматься в качестве изображения другого транспортного средства VX.
[0119] Ниже описывается устройство 100 для очистки линзы. Фиг. 21 показывает схематичную конфигурацию устройства 100 для очистки линзы настоящего варианта осуществления. Как показано на фиг. 21, устройство 100 для очистки линзы содержит бачок 101 для очищающей жидкости, по меньшей мере, для временного хранения очищающей жидкости, проток 102 для доставки очищающей жидкости, подаваемой из бачка 101 для очищающей жидкости, наливные раструбы 103a, 103b, сформированные в протоке 102, для налива капель очищающей жидкости W на поверхность линзы 11, воздушный компрессор 104 для сжатия воздуха, предоставляемого снаружи, трубку 105 для доставки сжатого воздуха и струйный раструб 106, сформированный на конце трубки 105, для распыления воздуха E на поверхность линзы 11. Работа различных элементов устройства 100 для очистки линзы, описанного выше, управляется посредством контроллера 110. Контроллер 110 очищает линзу 11 согласно управляющей программе в соответствии с конкретными предварительно заданными этапами очистки линзы. Далее описывается другой пример устройства 100 для очистки линзы в качестве второго варианта осуществления. Управление согласно настоящему изобретению, конечно, может применяться к устройству 100 для очистки линзы согласно второму варианту осуществления.
[0120] Отсутствуют конкретные ограничения на конкретные действия, захватываемые в ходе этапов очистки линзы; этапы очистки линзы настоящего варианта осуществления включают в себя этап увлажнения линзы, первый этап продувки воздухом, этап очистки и второй этап продувки воздухом. Фиг. 22 является временной диаграммой этапов очистки линзы настоящего варианта осуществления. Этапы очистки линзы настоящего варианта осуществления включают в себя "этап A увлажнения линзы", на котором очищающая жидкость W наливается по каплям на линзу 11, чтобы увлажнять поверхность линзы 11, "первый этап B продувки воздухом" для многократного прерывистого распыления на линзу 11 воздуха с предварительно определенными интервалами, чтобы распределять налитую очищающую жидкость W по всей поверхности линзы 11, "этап C очистки" для распыления очищающей жидкости W на линзу 11, чтобы смывать загрязнение с поверхности линзы 11, и "второй этап D продувки воздухом" для выпаривания очищающей жидкости W и сушки поверхности линзы 11, выполняемые в порядке A, B, C, D.
[0121] В частности, когда процесс очистки начинается во время TG0, контроллер 110 сначала выполняет "этап A увлажнения линзы". На "этапе A увлажнения линзы" выполняется процесс P1 налива очищающей жидкости, в котором очищающая жидкость непрерывно наливается на поверхность линзы 11 приблизительно в течение 200 мс. Контроллер 110 завершает "этап A увлажнения линзы" во время TG1 и затем начинает "первый этап B продувки воздухом". На первом этапе B продувки воздухом выполняются несколько процессов P2-P4 продувки диспергирующим воздухом. В настоящем варианте осуществления, воздух прерывисто распыляется в течение 20 мс три раза в циклах от 300 мс до 100 мс, но цикл распыления воздуха, время распыления и число распылений могут задаваться требуемым образом согласно характеристике подачи воздуха и размеру линзы 11. После того, как "первый этап B продувки воздухом" завершается во время TG2, контроллер 110 начинает "этап C очистки" и выполняет процесс P10 распыления очищающей жидкости, в котором очищающая жидкость W распыляется на поверхность линзы 11 в течение приблизительно 5-10 секунд, и когда этот процесс завершается во время TG3, начинает "этап D сушки" и выполняет процесс P20 продувки осушающим воздухом, в котором воздух распыляется на поверхность линзы 11 в течение приблизительно 30 секунд.
[0122] Модуль 38 оценки состояния линзы оценивает состояние линзы 11 на основе конкретных действий, захваченных в ходе этапов очистки линзы, описанных выше. Это обусловлено тем, что состояние линзы 11 постоянно изменяется по мере того, как она проходит через различные этапы из этапа A увлажнения линзы, первого этапа B продувки воздухом, этапа C очистки и второго этапа D продувки воздухом. Модуль 38 оценки состояния линзы настоящего варианта осуществления оценивает состояние линзы 11 с точки зрения количества очищающей жидкости W, прилипающей к линзе 11.
[0123] Когда выполняется процесс P1 налива очищающей жидкости из этапа A увлажнения линзы или процесс P10 распыления очищающей жидкости из этапа C очистки, модуль 38 оценки состояния линзы оценивает то, что существует относительно большое количество очищающей жидкости, прилипающей к линзе 11. Это состояние задается как "первое состояние, подлежащее управлению", подлежащее управлению обнаружением трехмерных объектов. Когда выполняются процессы P2, P3, P4 продувки диспергирующим воздухом из первого этапа B продувки воздухом, модуль 38 оценки состояния линзы оценивает то, что, собственно говоря, существует среднее количество очищающей жидкости, прилипающей к линзе 11. Это состояние задается как "второе состояние, подлежащее управлению", подлежащее управлению обнаружением трехмерных объектов. Когда выполняется процесс P20 продувки осушающим воздухом из второго этапа D продувки воздухом, модуль 38 оценки состояния линзы оценивает то, что существует относительно малое количество очищающей жидкости, прилипающей к линзе 11. Это состояние задается как "третье состояние, подлежащее управлению", подлежащее управлению обнаружением трехмерных объектов.
[0124] Когда линза очищается, очищающая жидкость прилипает к линзе 11. Таким образом, поскольку информация изображений, захватываемая в ходе очистки линзы, является менее надежной по сравнению с информацией изображений, захватываемой в обычных случаях (когда линза не очищается), управление остановкой процесса обнаружения трехмерных объектов, которое описывается далее, может постоянно выполняться, когда линза очищается, чтобы повышать точность обнаружения других транспортных средств.
[0125] Тем не менее, постоянное выполнение управления остановкой процесса обнаружения трехмерных объектов увеличивает нагрузку по обработке, и управление остановкой может выполняться даже в случаях, в которых надежность гарантируется, вместо этого понижая точность обнаружения других транспортных средств.
[0126] Таким образом, авторы изобретения провели множество тестов на предмет точности обнаружения других транспортных средств в ходе очистки линзы для вышеописанных процессов обнаружения других транспортных средств, движущихся в смежных полосах движения, на основе информации формы разностного сигнала, и обнаружения других транспортных средств, движущихся в смежных полосах движения, на основе информации краев, чтобы дополнительно сокращать случаи, в которых снижается точность обнаружения других транспортных средств.
[0127] В частности, авторы изобретения получили результаты анализа, указывающие очень высокую вероятность, в случае процесса обнаружения других транспортных средств на основе информации краев, пониженной точности обнаружения других транспортных средств, когда линза очищается в ходе этапа A увлажнения линзы, на котором выполняется процесс P1 налива очищающей жидкости, и в ходе этапа C очистки, на котором выполняется процесс P10 распыления очищающей жидкости (состояние линзы: первое состояние, подлежащее управлению). Одна возможная причина этого состоит в том, что в ходе этапа A увлажнения линзы и этапа C очистки, большие количества очищающей жидкости покрывают линзу 11, и пленка из очищающей жидкости препятствует способности к формированию изображений линзы 11, что приводит к тому, что края, соответствующие трехмерным объектам, становятся неразличимыми.
[0128] Авторы изобретения также получили результаты анализа, указывающие очень высокую вероятность, в случае процесса обнаружения других транспортных средств на основе информации формы разностного сигнала, пониженной точности обнаружения других транспортных средств, когда линза очищается в ходе первого этапа B продувки воздухом, когда выполняются процессы P2, P3, P4 продувки диспергирующим воздухом (состояние линзы: второе состояние, подлежащее управлению). Одна возможная причина этого состоит в том, что в ходе первого этапа B продувки воздухом прерывисто распыленный воздух разделяет большие количества очищающей жидкости на шарики, которые перемещаются по линзе 11, влияя на результаты информации формы разностного сигнала.
[0129] Авторы изобретения также получили результаты анализа, указывающие очень высокую вероятность снижения точности результатов обнаружения относительной скорости на основе информации формы разностного сигнала и результатов обнаружения относительной скорости на основе информации краев от времени, когда начинается этап продувки воздухом, выполняемый в последний раз на первом этапе A продувки воздухом, до тех пор, пока он не завершается, и в ходе второго этапа D продувки воздухом, в котором выполняется процесс P20 продувки осушающим воздухом (состояние линзы: третье состояние, подлежащее управлению). Одна возможная причина этого состоит в том, что очищающая жидкость переливает через линзу 11 вследствие непрерывного распыления воздуха в ходе второго этапа D продувки воздухом, влияя на изменение во времени в информации формы разностного сигнала информации краев. Другой причина состоит в том, что первоначально имеются большие количества очищающей жидкости в ходе первого этапа A продувки воздухом, но предусмотрено увеличенное число процессов продувки воздухом, что приводит к наблюдению явления, аналогичного явлению, возникающему в ходе второго этапа D продувки воздухом, в конечном процессе продувки воздухом.
Эти наблюдения авторов изобретения обобщаются в таблице 23.
[0130] Чтобы разрешать проблемы, описанные выше, контроллер 39 устройства 1 обнаружения трехмерных объектов согласно настоящему варианту осуществления настоящего изобретения предотвращает оценку обнаруженного трехмерного объекта в качестве другого транспортного средства VX на основе результатов оценки состояния линзы, предоставляемых в результате посредством модуля 38 оценки состояния линзы.
[0131] Ниже описывается контроллер 39 устройства 1 обнаружения трехмерных объектов настоящего варианта осуществления. Контроллер 39 настоящего варианта осуществления получает результаты оценки посредством модуля 38 оценки состояния линзы из предыдущего процесса и оценивает, находится или нет линза 11 в предварительно определенном состоянии, подлежащем управлению, т.е. в состоянии, требующем управления остановкой со стороны контроллера 39, в результатах оценки. В настоящем изобретении, "состояние, подлежащее управлению" означает состояние, в котором существует, по меньшей мере, некоторое количество очищающей жидкости, прилипающей к линзе 11. Это состояние прилипания очищающей жидкости включает в себя, по меньшей мере, одно из состояния, в котором распыляется очищающая жидкость, состояния, в котором имеется остаточная распыленная очищающая жидкость на линзе 11, или состояния, в котором имеется остаточная очищающая жидкость на линзе 11 после распыления воздуха, выполняемого после того, как распылена очищающая жидкость.
[0132] Если модуль 38 оценки состояния линзы оценивает то, что линза находится в одном из первого-третьего состояний, подлежащих управлению, описанных выше, контроллер 39 сохраняет результаты обнаружения от момента непосредственно перед тем, как состояние линзы оценено в качестве состояния, подлежащего управлению, в течение предварительно определенной продолжительности, т.е. прерывает вывод оценок того, представляют или нет обнаруженные трехмерные объекты собой другие транспортные средства VX, в течение предварительно определенной продолжительности, посредством этого предотвращая ошибочную идентификацию обнаруженных трехмерных объектов в качестве другого транспортного средства VX. Другими словами, доверие присваивается результатам обнаружения/оценки от момента раньше эффектов очистки линзы, и эти результаты обнаружения/оценки непрерывно используются, и процесс поиска результатов обнаружения/оценки приостанавливается в ходе состояний, подлежащих управлению, на которые оказывает влияние очистка линзы.
[0133] Таким образом, процесс обнаружения и процесс оценки трехмерных объектов останавливаются, в зависимости от состояния линзы 11, таким образом, что поддерживаются результаты обнаружения или результаты оценки от момента до того, как очищена линза, посредством этого предотвращая такие ошибки, как изменение уже обнаруженного трехмерного объекта на необнаруженный вследствие процесса очистки линзы или изменение необнаруженного трехмерного объекта на обнаруженный вследствие процесса очистки линзы. Это обеспечивает предотвращение снижения точности результатов обнаружения вследствие очистки линзы 11, даже когда другие транспортные средства VX обнаруживаются с использованием информации формы разностного сигнала или информации краев, обнаруживается с использованием информации краев, что позволяет предоставлять устройство обнаружения трехмерных объектов, которое обнаруживает другие транспортные средства, движущиеся в областях обнаружения, с высоким уровнем точности.
[0134] В этом случае, если модуль 38 оценки состояния линзы оценивает то, что состояние линзы является состоянием, подлежащим управлению, и состояние обнаружения, в котором трехмерный объект обнаруживается посредством модулей 33, 37 обнаружения трехмерных объектов, идентифицировано непосредственно перед тем, как состояние линзы оценено в качестве состояния, подлежащего управлению, контроллер 39 сохраняет результаты обнаружения от момента непосредственно перед тем, как состояние линзы оценено в качестве состояния, подлежащего управлению, в течение предварительно определенной продолжительности, и оценки того, представляют или нет обнаруженные трехмерные объекты собой другие транспортные средства VX, и их вывод прерываются в течение предварительно определенной продолжительности.
[0135] Другими словами, только когда трехмерный объект обнаруживается непосредственно перед тем, как линза переводится в состояние, подлежащее управлению вследствие очистки линзы, контроллер 39 сохраняет непосредственно предшествующие результаты обнаружения в течение предварительно определенной продолжительности и прерывает оценку того, представляют или нет обнаруженные трехмерные объекты собой другие транспортные средства VX, и ее вывод в течение предварительно определенной продолжительности, посредством этого предотвращая ошибочную оценку обнаруженного трехмерного объекта в качестве другого транспортного средства VX.
[0136] Таким образом, высоконадежные результаты обнаружения/оценки, указывающие то, что другое транспортное средство VX обнаружено, непрерывно используются до того, как ощущаются эффекты очистки линзы, и процесс поиска результатов обнаружения/оценки приостанавливается в состояниях, подлежащих управлению, на которые оказывает влияние очистка линзы, посредством этого предотвращая влияние на результаты обнаружения/оценки посредством очистки линзы и обеспечивая возможность обнаружения других транспортных средств VX с высокой точностью.
[0137] Любое из первого, второго или третьего состояний, подлежащих управлению, описанных выше, может задаваться в качестве состояния, подлежащего управлению, используемого в этом процессе. Конечно, также допустимо сохранять непосредственно предшествующие результаты обнаружения в течение предварительно определенной продолжительности и прерывать оценку того, представляют или нет обнаруженные трехмерные объекты собой другие транспортные средства VX, и ее вывод в течение предварительно определенной продолжительности для всех первого-третьего состояний, подлежащих управлению. В настоящем варианте осуществления, первое-третье состояния, подлежащие управлению, задаются на основе этапов очистки, но состояния, подлежащие управлению, могут быть заданы на основе различных этапов очистки. В этом случае, "состояния, в которых имеется очищающая жидкость, прилипающая к линзе 11", такие как состояния до и после того, как наливается очищающая жидкость, или состояния до и после того, как распыляется очищающая жидкость, могут задаваться как "состояния, подлежащие управлению". "Состояния, в которых имеется очищающая жидкость, прилипающая к линзе 11", включают в себя состояние, в котором продувается воздух, и имеется очищающая жидкость, остающаяся на линзе 11, после того как налита или распылена очищающая жидкость.
[0138] При рассмотрении ситуаций, в которых снижается точность обнаружения других транспортных средств VX, как описано выше, контроллер 39 настоящего варианта осуществления задает второе состояние, подлежащее управлению, в качестве состояния, подлежащего управлению, при обнаружении трехмерных объектов с использованием информации формы разностного сигнала, и задает первое состояние, подлежащее управлению, в качестве состояния, подлежащего управлению, при обнаружении трехмерных объектов с использованием информации краев.
[0139] В ходе процесса обнаружения трехмерных объектов посредством модуля 33 обнаружения трехмерных объектов с использованием информации формы разностного сигнала, если модуль 38 оценки состояния линзы оценивает то, что состояние линзы представляет собой второе состояние, подлежащее управлению, в котором существует среднее количество очищающей жидкости, прилипающей к линзе 11, контроллер 39 настоящего варианта осуществления сохраняет результаты обнаружения от момента непосредственно перед тем, как состояние линзы оценено в качестве второго состояния, подлежащего управлению, в течение предварительно определенной продолжительности, и прерывает оценку того, представляют или нет обнаруженные трехмерные объекты собой другие транспортные средства VX, и ее вывод в течение предварительно определенной продолжительности. Модуль 38 оценки состояния линзы оценивает то, что состояние линзы представляет собой второе состояние, подлежащее управлению, в котором существует среднее количество очищающей жидкости, прилипающей к линзе 11, на основе того факта, что этап очистки линзы выполняется от момента, когда начинается первый этап B продувки воздухом, до момента, когда завершается первый этап B продувки воздухом.
[0140] Как результат, в ходе процесса обнаружения трехмерных объектов с использованием информации формы разностного сигнала, процесс, который минимизирует некорректное обнаружение других транспортных средств VX, может быть избирательно выполнен в ходе процесса очистки линзы или во втором состоянии, подлежащем управлению, в котором имеется существенная тенденция к снижению точности обнаружения других транспортных средств VX вследствие очищающей жидкости, прилипающей к линзе 11, посредством этого позволяя уменьшать нагрузку по обработке и исключать избыточные процессы остановки. Как результат, другие транспортные средства VX могут быть обнаружены с большей точностью.
[0141] Чем больше число повторений P2-P4 продувки воздухом в ходе первого этапа B продувки воздухом, идентифицированное посредством модуля 38 оценки состояния линзы, тем меньше контроллер 39 задает предварительно определенную продолжительность, в течение которой сохраняются результаты обнаружения от момента непосредственно перед тем, как линза оценена как находящаяся во втором состоянии, подлежащем управлению. Как пояснено выше, прогнозируется, что имеются большие количества очищающей жидкости, перемещающиеся по линзе 11 в шариках в ходе первого этапа B продувки воздухом вследствие прерывисто продуваемого воздуха, явление, которое влияет на информацию формы разностного сигнала. Каждый раз, когда прерывистая продувка воздухом выполняется в ходе первого этапа B продувки воздухом, очищающая жидкость, скапливающаяся в лужицах на линзе 11, постепенно разносится по линзе, постепенно уменьшая количество очищающей жидкости, перемещающейся по линзе 11. Другими словами, чем больше число раз, когда продувается воздух, тем в большей степени уменьшается влияние количества очищающей жидкости на линзе 11 на информацию формы разностного сигнала; посредством этого предварительно определенная продолжительность, в течение которой сохраняются результаты обнаружения от момента непосредственно перед тем, как линза оценена как находящаяся во втором состоянии, подлежащем управлению, может сокращаться для того, чтобы приоритезировать результаты обнаружения в реальном времени.
[0142] Между тем, в ходе процесса обнаружения трехмерных объектов посредством модуля 37 обнаружения трехмерных объектов с использованием информации краев, если модуль 38 оценки состояния линзы оценивает то, что состояние линзы представляет собой первое состояние, подлежащее управлению, в котором существует большое количество очищающей жидкости, прилипающей к линзе 11, контроллер 39 настоящего варианта осуществления сохраняет результаты обнаружения от момента непосредственно перед тем, как состояние линзы оценено в качестве первого состояния, подлежащего управлению, в течение предварительно определенной продолжительности, и прерывает оценку того, представляют или нет обнаруженные трехмерные объекты собой другие транспортные средства VX, и ее вывод в течение предварительно определенной продолжительности. Модуль 38 оценки состояния линзы оценивает то, что состояние линзы представляет собой первое состояние, подлежащее управлению, в котором существует большое количество очищающей жидкости, прилипающей к линзе 11, в течение периода от момента, когда начинаются этапы очистки линзы, до момента, когда завершается этап A увлажнения линзы, и от момента, когда начинается этап C очистки, до момента, когда заканчивается этап C очистки.
[0143] Как результат, в ходе процесса обнаружения трехмерных объектов с использованием информации краев, процесс, который минимизирует некорректное обнаружение других транспортных средств VX, может быть избирательно выполнен в ходе процесса очистки линзы или в первом состоянии, подлежащем управлению, в котором имеется существенная тенденция к снижению точности обнаружения других транспортных средств VX вследствие очищающей жидкости, прилипающей к линзе 11, посредством этого позволяя уменьшать нагрузку по обработке и исключать чрезмерные процессы остановки. Как результат, другие транспортные средства VX могут быть обнаружены с большей точностью.
[0144] Когда модуль 38 оценки состояния линзы оценивает то, что состояние линзы представляет собой третье состояние, подлежащее управлению, в котором малое количество очищающей жидкости прилипает к линзе 11, контроллер 39 настоящего варианта осуществления сохраняет относительную скорость трехмерного объекта, обнаруженного непосредственно перед тем, как линза оценена как находящаяся в третьем состоянии, подлежащем управлению, или результаты оценки относительно того, является или нет трехмерный объект другим транспортным средством VX, которые получены на основе этой относительной скорости, в течение предварительно определенной продолжительности, и прерывает оценки того, является или нет обнаруженный трехмерный объект другим транспортным средством VX, и их вывод в течение предварительно определенной продолжительности. Модуль 38 оценки состояния линзы оценивает то, что состояние линзы представляет собой третье состояние, подлежащее управлению, в котором малое количество очищающей жидкости прилипает к линзе 11, от момента, когда начинается процесс P4 продувки воздухом, выполняемый в последний раз на первом этапе A продувки воздухом, до момента, когда завершается процесс, и от момента, когда начинается второй этап D продувки воздухом, до момента, когда завершается второй этап D продувки воздухом. Этот процесс может применяться независимо от того, используется информация формы разностного сигнала для того, чтобы обнаруживать трехмерные объекты, или используется информация краев для того, чтобы обнаруживать трехмерные объекты.
[0145] Как результат, когда оценено, что состояние линзы представляет собой третье состояние, подлежащее управлению, в котором очищающая жидкость, перемещающаяся по линзе вследствие воздуха, прерывисто продуваемого в ходе этапа сушки, влияет на изменение во времени в информации формы разностного сигнала/информации краев, что приводит к существенной тенденции к пониженной точности при обнаружении относительной скорости трехмерных объектов, процесс обнаружения относительной скорости избирательно останавливается, обеспечивая уменьшение нагрузки по обработке и препятствуя выполнению избыточных процессов остановки. Как результат, другие транспортные средства VX могут быть обнаружены с большей точностью.
[0146] Конкретные управляющие технологические действия, захваченные для различных состояний, подлежащих управлению, линзы 11, обобщаются на фиг. 24.
[0147] Команда управления настоящего варианта осуществления отправляется в модули 33, 37 обнаружения трехмерных объектов и модуль 34 оценки трехмерных объектов для того, чтобы предотвращать ошибочную оценку обнаруженного трехмерного объекта в качестве другого транспортного средства VX. Поскольку компьютер 30 варианта осуществления представляет собой компьютер, команды управления для процесса обнаружения трехмерных объектов, процесса оценки трехмерных объектов и процесса оценки состояния линзы могут быть включены в программы для различных процессов заранее или могут отправляться во время выполнения. Как результат, если оценено то, что линза 11 находится в предварительно определенном состоянии, подлежащем управлению, сохраняются результаты обнаружения/оценки от момента непосредственно перед тем, как выполнена эта оценка, и прерываются новые процессы обнаружения/оценки, обеспечивая предотвращение некорректных обнаружений, вызываемых посредством процесса очистки линзы.
[0148] Ниже описывается процедура управления устройства 1 обнаружения трехмерных объектов согласно настоящему варианту осуществления относительно блок-схемы последовательности операций способа, показанной на фиг. 25. Процесс, показанный на фиг. 25, представляет собой текущий процесс обнаружения трехмерных объектов, выполняемый после предыдущего процесса обнаружения трехмерных объектов с использованием результатов из предыдущего процесса.
[0149] Во-первых, на этапе S41, показанном на фиг. 25, модуль 38 оценки состояния линзы оценивает, находится или нет линза 11 в предварительно определенном состоянии, подлежащем управлению, на основе конкретных действий, захваченных на этапе очистки линзы, выполняемом посредством устройства 100 для очистки линзы.
[0150] Ниже описывается процесс управления для процесса оценки состояния линзы со ссылкой на блок-схему последовательности операций способа по фиг. 26. Модуль 38 оценки состояния линзы оценивает состояние линзы на основе конкретных действий, захваченных в ходе этапа очистки линзы с точки зрения количества очищающей жидкости, прилипающей к линзе. На этапе S62, если выполняется процесс P1 налива очищающей жидкости из этапа A увлажнения линзы или процесс P10 распыления очищающей жидкости из этапа C очистки, модуль 38 оценки состояния линзы оценивает то, что существует относительно большое количество очищающей жидкости, прилипающей к линзе 11, и процесс переходит к этапу S65. На этапе S65 модуль 38 оценки состояния линзы оценивает то, что состояние линзы представляет собой первое состояние, подлежащее управлению.
[0151] На следующем этапе S63, когда выполняются процессы P2, P3, P4 продувки диспергирующим воздухом из первого этапа B продувки воздухом, модуль 38 оценки состояния линзы оценивает то, что, собственно говоря, существует среднее количество очищающей жидкости, прилипающей к линзе 11, и процесс переходит к этапу S66. На этапе S66 модуль 38 оценки состояния линзы оценивает то, что состояние линзы представляет собой второе состояние, подлежащее управлению.
[0152] На следующем этапе S64 модуль 38 оценки состояния линзы оценивает то, что существует относительно малое количество очищающей жидкости, прилипающей к линзе 11, когда процесс P20 продувки осушающим воздухом выполняется в ходе второго этапа D продувки воздухом, и когда конечный процесс P4 продувки диспергирующим воздухом выполняется в ходе первого этапа B продувки воздухом, и процесс переходит к этапу S67. На этапе S67 модуль 38 оценки состояния линзы оценивает то, что состояние линзы представляет собой первое состояние, подлежащее управлению.
[0153] Также идентифицируется процесс, который должен управляться. Если линза оценивается как находящаяся в первом состоянии, подлежащем управлению, на этапе S65 процесс переходит к этапу S68, и процесс обнаружения и процесс оценки трехмерных объектов задаются в качестве процессов, подлежащих управлению (т.е. подлежащих выполнению процесса сохранения непосредственно предшествующих результатов). Аналогично, если линза оценивается как находящаяся во втором состоянии, подлежащем управлению, на этапе S66, процесс переходит к этапу S69, и процесс обнаружения и процесс оценки трехмерных объектов задаются в качестве процессов, подлежащих управлению (т.е. подлежащих выполнению процесса сохранения непосредственно предшествующих результатов).
[0154] Если линза оценивается как находящаяся в третьем состоянии, подлежащем управлению, на этапе S67, процесс переходит к этапу S70, и обнаружение относительной скорости и процесс обнаружения и процесс оценки трехмерных объектов на основе относительной скорости задаются в качестве процессов, подлежащих управлению (т.е. подлежащих выполнению процесса сохранения непосредственно предшествующих результатов).
[0155] Если состояние линзы представляет собой первое состояние, подлежащее управлению, время сохранения или время прерывания процесса обнаружения/оценки задается равным T3 на этапе S71. Если состояние линзы представляет собой второе состояние, подлежащее управлению, время сохранения или время прерывания процесса обнаружения/оценки задается равным T2 на этапе S72. Если состояние линзы представляет собой третье состояние, подлежащее управлению, время сохранения или время прерывания процесса обнаружения/оценки задается равным T1 на этапе S73. Время T1 сохранения или время прерывания для обнаружения относительной скорости и процесса обнаружения/оценки трехмерных объектов на основе относительной скорости меньше времен T2, T3 сохранения или времен прерывания для процесса обнаружения/оценки трехмерных объектов. Это обусловлено тем, что относительная скорость обнаруживается на основе информации, связанной с изменением во времени результатов обнаружения трехмерных объектов, так что в итоге имеется вероятность пониженной точности в обнаруженной относительной скорости, если предыдущие результаты сохраняются слишком долго. Время T3 сохранения или время прерывания для процесса обнаружения трехмерных объектов на основе информации краев может задаваться, превышающим время T2 сохранения или время прерывания для процесса обнаружения трехмерных объектов на основе информации формы разностного сигнала. Это обусловлено тем, что первое состояние, подлежащее управлению, в котором существует большое количество очищающей жидкости, прилипающей к линзе 11, зачастую остается в течение относительно длительного периода времени. T3 и T2, конечно, могут задаваться равными идентичной продолжительности.
[0156] После оценки состояния линзы, идентификации процесса, подлежащего управлению, и оценки времени T1-T3 сохранения/времени прерывания или одновременно с ними выполняются процессы этапа S42 и далее на фиг. 25.
[0157] Возвращаясь к фиг. 25, на этапе 42 контроллер 39 оценивает результаты оценки из этапа 41. Если на этапе S41 оценивается то, что линза находится в "состоянии, подлежащем управлению", которое задано как состояние, в котором выполняется управление остановкой, контроллер 39 переходит к этапу S43; если оценивается то, что линза не находится в "состоянии, подлежащем управлению", которое задано как состояние, в котором выполняется управление остановкой, процесс переходит к этапу S46. "Состояния, подлежащие управлению" для линзы 11 могут задаваться надлежащим образом. Например, при обнаружении других транспортных средств VX на основе информации краев, "состояние, подлежащее управлению" задается как первое состояние, подлежащее управлению, показанное на фиг. 23 и 24 и при обнаружении других транспортных средств VX на основе информации формы разностного сигнала, "состояние, подлежащее управлению" может задаваться как второе состояние, подлежащее управлению, показанное на фиг. 23 и 24. Наряду с этим, "состояние, подлежащее управлению" может задаваться как третье состояние, подлежащее управлению, показанное на фиг. 23 и 24.
[0158] На этапе S43 контроллер 39 сохраняет результаты обнаружения или оценки от момента непосредственно перед тем, как состояние линзы оценено в качестве состояния, подлежащего управлению, в течение предварительно определенной продолжительности, и прерывает процесс оценки (обнаружения) того, представляют или нет обнаруженные трехмерные объекты собой другие транспортные средства VX, и ее вывод в течение предварительно определенной продолжительности.
[0159] Далее описывается этот процесс со ссылкой на фиг. 27. Во-первых, в качестве примера описывается сценарий, в котором результаты связанного с трехмерным объектом обнаружения/оценки выдаются в течение продолжительности E1 от времени E10 до E11, после чего состояние линзы является состоянием, подлежащим управлению, в течение продолжительности W от времени W10 до W11. Контроллер 39 сохраняет результаты обнаружения/оценки, связанные с трехмерным объектом, обнаруженным в течение продолжительности E1 непосредственно перед временем W1, в которое состояние линзы оценено в качестве состояния, подлежащего управлению. Другими словами, контроллер 39 трактует результаты обнаружения/оценки от продолжительности E1 как фактические результаты обнаружения/оценки в течение предварительно определенной продолжительности K1 после того, как истекли времена E10-E11, в которые выведены результаты обнаружения/оценки, связанные с трехмерными объектами, и процесс оценки других транспортных средств VX (процесс обнаружения трехмерных объектов) выполняется на основе этих результатов. Предварительно определенная продолжительность K1 может задаваться требуемым образом. В результате этого процесса сохранения непосредственно предшествующих результатов обнаружения/оценки и прерывания новых процессов обнаружения/оценки и их вывода, результаты обнаружения/оценки от продолжительности E1, в течение которой фактически выполнены эти процессы, трактуются (фиктивно) как результаты, обнаруженные или оцениваемые за продолжительность E1.
[0160] Таким образом, контроллер 39 сохраняет результаты обнаружения или результаты оценки от момента непосредственно перед тем, как линза переходит в предварительно определенное состояние, подлежащее управлению, и отказывается от оценки того, представляют или нет трехмерные объекты собой другие транспортные средства VX, на основе новой информации полученных изображений в течение предварительно определенной продолжительности после того, как линза переходит в предварительно определенное состояние, подлежащее управлению. В результате этого процесса, можно предотвращать некорректную идентификацию обнаруженных трехмерных объектов в качестве других транспортных средств VX, даже когда линза находится в предварительно определенном состоянии, подлежащем управлению, что зачастую приводит к пониженной точности результатов обнаружения.
[0161] После этапа 43 процесс может переходить непосредственно к этапу S46 или может проходить через процессы этапов S44 и 45 перед переходом к этапу S46. На этапе S44, контроллер 39 оценивает, обнаруживается или нет трехмерный объект посредством модулей 33, 37 обнаружения трехмерных объектов. Если трехмерный объект обнаруживается, процесс переходит к этапу S45, увеличивается предварительно определенная продолжительность, в течение которой сохраняются результаты обнаружения/оценки, выполняемого на этапе S43, и увеличивается предварительно определенная продолжительность, в течение которой прерываются процесс обнаружения/оценки и ее процесс вывода. На основе перспективы того, что результаты обнаружения/оценки, указывающие то, что трехмерный объект обнаруживается, являются высоконадежными, вес придается оценкам, выполняемым, когда обнаруживается трехмерный объект, повышая точность при обнаружении других транспортных средств VX.
[0162] На следующем этапе S46 трехмерный объект (другое транспортное средство) обнаруживается на основе информации формы разностного сигнала или информации краев. На этапе S47, оценивается, является или нет трехмерный объект, обнаруженный на этапе S46, другим транспортным средством VX. Если трехмерный объект является другим транспортным средством VX, результаты оценки, указывающие то, что другое транспортное средство присутствует, выводятся на этапе S48. Если трехмерный объект не является другим транспортным средством VX, результаты оценки, указывающие то, что другое транспортное средство не присутствует, выводятся на этапе S49. Процессы, выполняемые на этапах S46 и S47, являются идентичными процессу обнаружения других транспортных средств VX на основе информации формы разностного сигнала, как описано с использованием фиг. 11 и 12, и процессу обнаружения других транспортных средств VX на основе информации краев, как описано с использованием фиг. 17 и 18. Если трехмерный объект не обнаруживается на этапе S44, процесс может переходить к этапу S50 и завершать процесс обнаружения трехмерных объектов, или процесс может переходить к этапу S49 и определять то, что другое транспортное средство не присутствует.
[0163] ВТОРОЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ
Ниже описывается другое устройство 100 для очистки линзы, которое может применяться в качестве устройства 100 для очистки линзы согласно первому настоящему изобретению настоящего изобретения, со ссылкой на чертежи.
[0164] Устройство 100 для очистки линзы согласно настоящему варианту осуществления содержит форсунку, которая располагается таким образом, что ее выпускное отверстие обращено к поверхности линзы камеры, и включает в себя канал для очищающей жидкости, который направляет очищающую жидкость в выпускное отверстие, и воздушный канал, который направляет сжатый воздух в выпускное отверстие, средство доставки очищающей жидкости для доставки очищающей жидкости в форсунку и средство доставки сжатого воздуха для доставки сжатого воздуха в форсунку, причем очищающая жидкость и сжатый воздух распыляются из выпускного отверстия, чтобы очищать поверхность линзы посредством активации средства доставки очищающей жидкости и многократной прерывистой активации средства доставки сжатого воздуха.
[0165] Фиг. 28 является блок-схемой конфигурации устройства для очистки смонтированной на транспортном средстве камеры линзы согласно одному варианту осуществления настоящего изобретения. Как показано на фиг. 28, устройство 100 для очистки линзы согласно настоящему варианту осуществления содержит бачок 2 с резервуаром для очищающей жидкости для накопления очищающей жидкости, насос 3 для подачи очищающей жидкости (средство подачи очищающей жидкости) для выдачи очищающей жидкости, накопленной в бачке 2 с резервуаром для очищающей жидкости, воздушный насос 5 (средство подачи сжатого воздуха) для выдачи сжатого воздуха и форсунку 7 для распыления очищающей жидкости, сжатого воздуха или смеси очищающей жидкости и сжатого воздуха на поверхность линзы камеры 1.
[0166] Также предоставляются трубка 4 для очищающей жидкости для направления очищающей жидкости, выдаваемой посредством насоса 3 для подачи очищающей жидкости, во вторичный бачок 13 для накопления очищающей жидкости, воздуховод 6 для направления сжатого воздуха, выдаваемого посредством воздушного насоса 5, в форсунку 7 модуля 22 форсунки, и модуль 8 управления (средство управления) для управления работой насоса 3 для подачи очищающей жидкости и воздушного насоса 5.
[0167] Фиг. 29(a) является видом в перспективе устройства 100 для очистки линзы согласно настоящему варианту осуществления, смонтированного на камере 1, смонтированной в задней части транспортного средства, а фиг. 29(b) является видом устройства 100 для очистки линзы по фиг. 29(a) от направления A. Как показано на фиг. 29(a), модуль 22 форсунки для очистки поверхности 1a линзы анкеруется сзади транспортного средства около стороны камеры 1, также анкерованной сзади транспортного средства. Модуль 22 форсунки содержит форсунку 7 для распыления очищающей жидкости и сжатого воздуха в направлении поверхности 1a линзы и крышку 7d. Как показано на фиг. 29(b), форсунка 7 содержит на конце два выпускных отверстия 10a, 10b для распыления очищающей жидкости и сжатого воздуха. Иными словами, очищающая жидкость и сжатый воздух распыляются посредством выпускных отверстий 10a, 10b форсунки 7 в направлении поверхности 1a линзы, посредством этого удаляя постороннее вещество, прилипающее к поверхности 1a линзы.
[0168] Фиг. 30 является видом в перспективе в частичном сечении модуля 22 форсунки, показанного на фиг. 29(a). Как показано на фиг. 30, воздушный канал 12 для направления сжатого воздуха предоставляется в центральной части форсунки 7, предоставленной на конце модуля 22 форсунки, и каналы 11a, 11b для очищающей жидкости для направления очищающей жидкости предоставляются с правой и с левой стороны воздушного канала 12. Концы воздушного канала 12 и каналов 11a, 11b для очищающей жидкости изгибаются практически под прямым углом таким образом, что они обращены к поверхности 1a линзы камеры 1.
[0169] Вторичный бачок 13 для временного накопления очищающей жидкости предоставляется выше каналов 11a, 11b для очищающей жидкости. Соединитель 13a для соединения с трубкой 4 для очищающей жидкости и соединитель 13b для соединения с трубкой 4 для очищающей жидкости предоставляются со стороны вторичного бачка 13; из них, соединитель 13b соединяется с воздушным каналом 12 через проток, предоставленный ниже вторичного бачка 13. В частности, сжатый воздух, введенный в модуль 22 форсунки через соединитель 13b, проводится непосредственно в воздушный канал 12.
[0170] Соединитель 13a соединяется с вторичным бачком 13, и очищающая жидкость, подаваемая через соединитель 13a, протекает вовнутрь сверху вторичного бачка 13. Трубка, соединяющаяся от соединителя 13a ко вторичному бачку 13, используемая в ходе этого процесса, обращена в вертикальном направлении, как указано посредством ссылочной позиции 23 на фиг. 33(b). Далее подробно описывается эта трубка 23.
[0171] Как показано на фиг. 30, дно вторичного бачка 13 соединяется с двумя каналами 11a, 11b для очищающей жидкости. Таким образом, сжатый воздух, выдаваемый посредством воздушного насоса 5, показанного на фиг. 28, направляется через воздуховод 6 в воздушный канал 12 форсунки 7, в то время как очищающая жидкость, выдаваемая посредством насоса 3 для подачи очищающей жидкости, накапливается во вторичном бачке 13, а затем направляется в два канала 11a, 11b для очищающей жидкости.
[0172] Фиг. 31(b) является иллюстрацией подробной конфигурации концевой секции форсунки, показывая вид в поперечном сечении части, указываемой посредством ссылочной позиции P1 на фиг. 31(a). Как показано на фиг. 31(b), воздушный канал 12 предоставляется в центре конца форсунки 7, и два канала 11a, 11b для очищающей жидкости предоставляются таким образом, что между ними размещается воздушный канал 12.
[0173] Каналы 11a, 11b для очищающей жидкости соединяются с концевыми секциями 15a, 15b, причем концевые секции 15a, 15b имеют площадь протока, которая меньше площади протока каналов 11a, 11b для очищающей жидкости. Как результат, скорость очищающей жидкости, протекающей через каналы 11a, 11b для очищающей жидкости, возрастает в концевых секциях 15a, 15b.
[0174] Между тем, конец воздушного канала 12 разветвляется на две концевых секции 14a, 14b. Концевые секции 14a, 14b имеют площадь протока, которая меньше площади протока воздушного канала 12. Как результат, скорость сжатого воздуха, протекающего через воздушный канал 12, возрастает при прохождении через концевые секции 14a, 14b.
[0175] Концевая секция 15a одного канала 11a для очищающей жидкости и одна концевая секция 14a воздушного канала 12 объединяются с возможностью формировать объединенный проток 16a, конец которого формирует выпускное отверстие 10a (см. фиг. 29(b)). Концевая секция 15b другого канала 11b для очищающей жидкости и другая концевая секция 14b воздушного канала 12 объединяются с возможностью формировать объединенный проток 16b, конец которого формирует выпускное отверстие 10b (фиг. 29(b)). Объединенный проток 16a и объединенный проток 16b обращены в направлениях, веерообразно расходящихся наружу к дальнему концу.
[0176] Таким образом, очищающая жидкость, выдаваемая посредством насоса 3 для подачи очищающей жидкости, показанного на фиг. 28, накапливается во вторичном бачке 13, и когда сжатый воздух выдается посредством воздушного насоса 5, сжатый воздух распыляется на повышенной скорости потока, причем распыляемый сжатый воздух создает отрицательное давление в каналах 11a, 11b для очищающей жидкости и извлекает очищающую жидкость, накопленную во вторичном бачке 13. Таким образом, сжатый воздух и очищающая жидкость распыляются из выпускных отверстий 10a, 10b через два объединенных протока 16a, 16d на поверхность 1a линзы. Жидкая смесь из очищающей жидкости и сжатого воздуха распыляется в веерообразно расходящемся наружу направлении, как показано на фиг. 32, обеспечивая возможность очистки всей поверхности 1a линзы.
[0177] Как показано на фиг. 31(b), поверхность 7a для распыления на конце форсунки 7 выступает дальше вперед по сравнению с окружающей боковой поверхностью 7b. Эта компоновка позволяет предотвращать прилипание очищающей жидкости, распыленной из выпускных отверстий 10a, 10b, к боковой поверхности 7b форсунки 7. В частности, можно предотвращать прилипание очищающей жидкости к областям, помеченным P2 и P3 на фиг. 32.
[0178] Фиг. 33(b) является видом в поперечном сечении модуля 22 форсунки, показанного на фиг. 33(a), при просмотре от направления "D". Как показано на фиг. 33(b), предусмотрен малой зазор между нижней поверхностью 7c форсунки 7 и верхней поверхностью 1b камеры 1. Ширина зазора снижается в направлении к внутренней части. Благодаря этой компоновке, даже если очищающая жидкость поступает между нижней поверхностью 7c форсунки 7 и верхней поверхностью 1b камеры 1, очищающая жидкость постепенно проталкивается вовнутрь зазора между форсункой 7 и камерой 1 посредством поверхностного натяжения и выпускается наружу в левой и правой стороне камеры 1, при просмотре от передней части. Другими словами, присутствие малого зазора между нижней поверхностью 7c форсунки 7 и верхней поверхностью 1b камеры 1 обеспечивает возможность исключения таких проблем, как скапливание и затвердевание очищающей жидкости.
[0179] Как показано на фиг. 33(b), подающий раструб 13c для подачи очищающей жидкости во вторичном бачке 13, предоставленном выше форсунки 7, предоставляется в верхней части вторичного бачка 13, и трубка 23, обращенная к вертикальному направлению, предоставляется в подающем раструбе 13c. Трубка 23 соединяется с соединителем 13a, показанным на фиг. 30. То, что трубка 23 обращена в вертикальном направлении, предотвращает нерегулярное протекание очищающей жидкости, накопленной в трубке, во вторичный бачок 13, когда прекращена подача очищающей жидкости посредством насоса 3 для подачи очищающей жидкости (фиг. 28). Другими словами, можно предотвращать протекание очищающей жидкости во вторичный бачок 13 вследствие вибрации и т.п., когда вторичный бачок 13 является пустым.
[0180] Контрольный клапан 24 предоставляется на верхней поверхности вторичного бачка 13. Контрольный клапан 24, например, представляет собой зонтичный клапан и имеет такую конфигурацию, в которой клапан открывается, и воздух снаружи поступает через вентиляционное отверстие 25, когда давление во вторичном бачке 13 является отрицательным, и клапан закрывается, и выпуск наружу блокируется, когда давление во вторичном бачке 13 является положительным.
[0181] Как показано на фиг. 33(b), нижняя поверхность 13d вторичного бачка 13 наклонена вперед (т.е. слева на чертеже) и вниз, и выпускная трубка вторичного бачка 13 и каналы 11a, 11b для очищающей жидкости и воздушный канал 12, предоставленные в форсунке 7 (см. фиг. 30), также наклонены вниз и вперед. Эта компоновка препятствует скапливанию очищающей жидкости, накопленной во вторичном бачке 13, в лужицах в фиксированном местоположении и обеспечивает надежное протекание вниз вследствие наклона в каждой позиции.
[0182] Далее описывается подробная конфигурация модуля 8 управления (средства управления), показанного на фиг. 28, в отношении блок-схемы, показанной на фиг. 34. Как показано на фиг. 34, модуль 8 управления соединяется с модулем управления, установленным в транспортном средстве, получает различные типы информации транспортного средства в форме информации 31 скорости рассматриваемого транспортного средства, информации 32 переключателя стеклоочистителя, информации 33 переключателя стеклоомывателя, информации 34 позиций переключения коробки передач и информации 35 переключателя света передних фар, а также информации 41 изображений, снятых камерой, составляющих изображение, захваченное посредством камеры 1.
[0183] Модуль 8 управления содержит модуль 55 оценки состояния загрязнения (средство оценки состояния загрязнения), который оценивает, существует или нет загрязнение на поверхности 1a линзы камеры 1, на основе информации 41 изображений, снятых камерой, и модуль 51 оценки операций очистки для оценки режима очистки (подробности описываются далее) поверхности 1a линзы на основе различных типов информации транспортного средства. Также предоставляются модуль 52 приведения в действие воздушного насоса для управления приведением в действие воздушного насоса 5, модуль 53 приведения в действие насоса для подачи очищающей жидкости для управления приведением в действие насоса 3 для подачи очищающей жидкости и модуль 54 выдачи уведомлений, который выводит сигнал уведомления, когда возникает анормальность во время операции очистки, все из которых основаны на режиме очистки, оцениваемом посредством модуля 51 оценки операций очистки. Модуль 8 управления соединяется с модулем 61 сигнализации, который выдает уведомление в отношении того, что сформировано предупреждение, когда модуль 54 выдачи уведомлений выводит сигнал уведомления.
[0184] Далее описываются различные режимы очистки, заданные, надлежащим образом, согласно результатам, оцениваемым посредством модуля 51 оценки операций очистки. В настоящем варианте осуществления, задаются три режима: режим очистки под давлением, в котором очищающая жидкость и сжатый воздух распыляются с тем, чтобы мыть поверхность 1a линзы, режим продувки воздухом, в котором продувается только сжатый воздух с тем, чтобы удалять капли, прилипающие к поверхности 1a линзы, и режим непрерывного промывания, в котором очищающая жидкость прерывисто наливается по каплям на поверхность 1a линзы с тем, чтобы препятствовать прилипанию загрязнения к ней. Один из этих трех режимов выбирается и выполняется, надлежащим образом, согласно состоянию загрязнения поверхности 1a линзы и другим условиям, таким как погодные условия, эффективно очищая камеру 1.
[0185] Во-первых, описывается режим очистки под давлением. В режиме очистки под давлением, насос 3 для подачи очищающей жидкости приводится в действие в течение короткого промежутка времени в ответ на управление, выполняемое посредством модуля 53 приведения в действие насоса для подачи очищающей жидкости, показанного на фиг. 34, что позволяет накапливать очищающую жидкость во вторичном бачке 13 и, одновременно, воздушный насос 5 приводится в действие в ответ на управление, выполняемое посредством модуля 52 приведения в действие воздушного насоса. В частности, как показано на фиг. 36(a), (b), насос 3 для подачи очищающей жидкости и воздушный насос 5 приводятся в действие во время t0.
Затем, в течение продолжительности t0-t1 (например, 200 мс), очищающая жидкость, хранящаяся в бачке 2 с резервуаром для очищающей жидкости, подается во вторичный бачок 13 через трубку 4 для очищающей жидкости, что позволяет накапливать очищающую жидкость во вторичном бачке 13. Продолжительность t0-t1 задается равной времени, необходимому насосу 3 для подачи очищающей жидкости для того, чтобы полностью заполнять вторичный бачок 13 очищающей жидкостью.
[0186] Сжатый воздух, выдаваемый посредством воздушного насоса 5, направляется через воздуховод 6 в воздушный канал 12 в форсунке 7, показанной на фиг. 30, после чего сжатый воздух выдается из концевых секций 14a, 14b, показанных на фиг. 31(b), в объединенные протоки 16a, 16b. Поскольку концевые секции 14a, 14b имеют меньшую площадь протока, чем воздушный канал 12, скорость потока воздуха увеличивается в концевых секциях 14a, 14b. Отрицательное давление посредством этого создается в концевых секциях 15a, 15b каналов 11a, 11b для очищающей жидкости ниже объединенных протоков 16a, 16b, извлекается очищающая жидкость, хранящаяся во вторичном бачке 13, и извлеченная таким способом очищающая жидкость протекает через каналы 11a, 11b для очищающей жидкости в объединенные протоки 16a, 16b.
[0187] Как результат, очищающая жидкость распыляется в форме аэрозоля вместе со сжатым воздухом из объединенных протоков 16a, 16b. Таким образом, можно распылять очищающую жидкость в форме аэрозоля из выпускных отверстий 10a, 10b на концах объединенных протоков 16a, 16b на поверхность 1a линзы. Это дает возможность удаления постороннего вещества, прилипающего поверхности 1a линзы, через синергетические эффекты аэрозольной очищающей жидкости и давления воздуха.
[0188] Когда очищающая жидкость во вторичном бачке 13 распыляется и полностью расходуется во время t2, показанное на фиг. 36(b), только сжатый воздух затем распыляется от времени t2 до времени t3, обеспечивая возможность удаления капель, прилипающих к поверхности 1a линзы, посредством сжатого воздуха.
[0189] Другими словами, в режиме очистки под давлением активируется воздушный насос 5 (средство подачи сжатого воздуха), сжатый воздух распыляется из выпускных отверстий 10a, 10b, отрицательное давление, создаваемое посредством распыления сжатого воздуха, приводит к извлечению очищающей жидкости, подаваемой в каналы 11a, 11b для очищающей жидкости, и распылению из выпускных отверстий 10a, 10b, и распыленный сжатый воздуха и очищающая жидкость очищают поверхность 1a линзы. Этот режим очистки под давлением подходит для удаления постороннего вещества, такого как грязь, прилипающая к поверхности 1a линзы.
[0190] Задание большего времени приведения в действие для насоса 3 для подачи очищающей жидкости, как показано на фиг. 36(a) (например, t0-t1 в 400 мс), обеспечивает возможность вытеснения очищающей жидкости, накопленной во вторичном бачке 13, посредством давления насоса 3 для подачи очищающей жидкости и подачи очищающей жидкости в каналы 11a, 11b для очищающей жидкости под давлением, предоставляя возможность очистки под высоким давлением поверхности 1a линзы.
[0191] Далее описывается режим продувки воздухом. В режиме продувки воздухом, без очищающей жидкости, накопленной во вторичном бачке 13, управляется модуль 52 приведения в действие воздушного насоса, показанный на фиг. 34, и только воздушный насос 5 приводится в действие. В частности, как показано на фиг. 37(a), насос 3 для подачи очищающей жидкости останавливается, и как показано на фиг. 37(b), воздушный насос 5 приводится в действие в течение продолжительности t10-t11 (например, две секунды). Сжатый воздух затем распыляется из выпускных отверстий 10a, 10b через концевые секции 14a, 14b воздушного канала 12 и объединенные протоки 16a, 16b на поверхность 1a линзы. Капли, прилипающие к поверхности 1a линзы камеры 1, посредством этого могут удаляться посредством давления воздуха.
[0192] Поскольку трубка 23, соединенная со вторичным бачком 13, обращена в практически вертикальном направлении, как показано на фиг. 33, и нижняя поверхность 13d вторичного бачка 13 и трубки для очищающей жидкости наклонены вниз, нет остаточной очищающей жидкости во вторичном бачке 13 или в его трубке. Таким образом, можно предотвращать направление очищающей жидкости в объединенные протоки 16a, 16b, даже если сжатый воздух распыляется, и существует отрицательное давление во вторичном бачке 13, предотвращая смешивание очищающей жидкости со сжатым воздухом. Следовательно, можно исключать такие проблемы, как прилипание очищающей жидкости, смешанной в со сжатым воздухом, к поверхности 1a линзы, когда сжатый воздух распыляется для того, чтобы удалять прилипающие капли с поверхности 1a линзы. Другими словами, в режиме продувки воздухом, сжатый воздух подается в воздуховод 6 посредством воздушного насоса 5 (средства подачи сжатого воздуха), тогда как подача очищающей жидкости прекращается, и сжатый воздух распыляется из выпускных отверстий 10a, 10b, посредством этого очищая поверхность 1a линзы. Режим продувки воздухом подходит для удаления капель, прилипающих к поверхности 1a линзы.
[0193] Далее описывается режим непрерывного промывания. В режиме непрерывного промывания, очищающая жидкость подается из насоса 3 для подачи очищающей жидкости во вторичный бачок 13 в результате управления, выполняемого посредством модуля 53 приведения в действие насоса для подачи очищающей жидкости, и воздушный насос 5 прерывисто приводится в действие в результате управления, выполняемого посредством модуля 52 приведения в действие воздушного насоса, посредством этого наливая очищающую жидкость на поверхность 1a линзы. В частности, как показано на фиг. 38, насос 3 для подачи очищающей жидкости приводится в действие в течение временного интервала t20-t21, чтобы накапливать очищающую жидкость во вторичном бачке 13, после чего воздушный насос 5 прерывисто приводится в действие во время t22 в течение продолжительности T1, посредством этого понемногу наливая очищающую жидкость на поверхность 1a линзы. Малые количества очищающей жидкости (например, 0,25 cc) наливаются в это время на поверхность 1a линзы во временной интервал, например, в t22-23.
[0194] Поверхность 1a линзы посредством этого может поддерживаться в постоянно увлажненном состоянии, позволяя препятствовать отделению компонентов загрязнения, содержащихся в воде, разбрызгиваемой посредством транспортного средства во время дождливой погоды. Другими словами, в режиме непрерывного промывания, сжатый воздух многократно прерывисто распыляется из выпускных отверстий 10a, 10b, отрицательное давление, создаваемое посредством распыления сжатого воздуха, извлекает очищающую жидкость, и очищающая жидкость распыляется из выпускных отверстий 10a, 10b на поверхность 1a линзы. Этот режим непрерывного промывания подходит для поддержания поверхности 1a линзы в увлажненном состоянии во время дождливой погоды и препятствования осаждения компонентов загрязнения на поверхность 1a линзы.
[0195] Использование устройства 100 для очистки линзы, согласно второму варианту осуществления, сконфигурированного так, как описано выше, дает возможность выполнения предварительно определенных этапов очистки, описанных в контексте первого варианта осуществления, под управлением контроллера 110.
[0196] Далее описывается работа устройства 100 для очистки линзы смонтированной на транспортном средстве камеры согласно настоящему варианту осуществления, сконфигурированного так, как описано выше, со ссылкой на блок-схему последовательности операций способа, показанную на фиг. 35. Фиг. 35 показывает технологическую процедуру, выполняемую посредством модуля 8 управления, которая выполняется согласно предварительно определенному циклу вычисления. Во-первых, на этапе S1, модуль 51 оценки операций очистки модуля 8 управления получает информацию рассматриваемого транспортного средства. В частности, модуль получает различные типы информации 30 транспортного средства, показанной на фиг. 34, т.е. информацию 31 скорости рассматриваемого транспортного средства, информацию 32 переключателя стеклоочистителя, информацию 33 переключателя стеклоомывателя, информацию 34 позиций переключения коробки передач и информацию 35 переключателя света передних фар.
[0197] На этапе S2 модуль 55 оценки состояния загрязнения модуля 8 управления получает информацию 41 изображений, снятых камерой.
[0198] На этапе S3 модуль 55 оценки состояния загрязнения оценивает, присутствует или нет загрязнение на поверхности 1a линзы, на основе изображения, снятого камерой. Присутствие или отсутствие загрязнения может оцениваться посредством выполнения предварительно определенной обработки изображений для захваченного изображения и оценки того, существуют или нет местоположения блокировки света. При оценке загрязнения поверхности 1a линзы, также можно оценивать, сейчас день или ночь, на основе информации 35 переключателя света передних фар, и изменять условия оценки загрязнения согласно тому, сейчас день или ночь. Выполнение этого процесса обеспечивает возможность оценки загрязнения с более высокой точностью. Если загрязнение присутствует (этап S3: "присутствует"), процесс переходит к этапу S4; если нет (этап S3: "не присутствует"), процесс переходит к этапу S7.
[0199] На этапе S4 модуль 51 оценки операций очистки оценивает, меньше или нет число раз, когда очистка под давлением выполнена ранее, предварительно определенного порогового числа раз (например, трех раз). Если число раз меньше порогового значения (этап S4: "Да"), модуль 51 оценки операций очистки очищает поверхность 1a линзы в режиме очистки под давлением на этапе S5. В частности, воздушный насос 5 приводится в действие посредством модуля 52 приведения в действие воздушного насоса, и насос 3 для подачи очищающей жидкости приводится в действие посредством модуля 53 приведения в действие насоса для подачи очищающей жидкости, посредством этого распыляя очищающую жидкость и сжатый воздух из выпускных отверстий 10a, 10b форсунки 7 и счищая загрязнение, прилипающее к поверхности 1a линзы.
[0200] Между тем, если число раз, когда очистка под давлением выполнена ранее, равно или превышает пороговое значение (этап S4: "Нет"), оценивается то, что загрязнение на поверхности 1a линзы не удалено, несмотря на выполнение очистки в режиме очистки под давлением пороговое число раз; посредством этого модуль 54 выдачи уведомлений выводит предупредительный сигнал на этапе S6. Как результат, посредством модуля 61 сигнализации выдается предупреждение, позволяющее довести до сведения водителя то, что загрязнение на поверхности 1a линзы не удалено.
[0201] Если в ходе процесса этапа S3 оценивается то, что отсутствует загрязнение на поверхности 1a линзы, на этапе S7 оценивается, являются или нет текущие погодные условия дождливыми. Этот процесс основан, например, на информации 32 переключателя стеклоочистителя: если стеклоочистители работают, погода оценивается как дождливая. Если она оценивается как дождливая погода, процесс переходит к этапу S8; если нет, процесс переходит к этапу S11.
[0202] На этапе S8 модуль 51 оценки операций очистки вычисляет частоту продувки воздухом согласно скорости рассматриваемого транспортного средства. В частности, данные, указывающие взаимосвязь между скоростью транспортного средства и частотой очистки в режиме продувки воздухом, предварительно сохраняются в запоминающем устройстве (не показано), принадлежащем модулю 8 управления, и когда получается информация 31 скорости рассматриваемого транспортного средства, показанная на фиг. 34, при обращении к этим данным, частота очистки в режиме продувки воздухом задается согласно информации скорости рассматриваемого транспортного средства. Например, частота для транспортного средства при движении на максимальной скорости задается равной максимальной частоте в каждые две секунды, частота для транспортного средства при остановке задается равной минимальной частоте в каждые две минуты, и частоты для промежуточных скоростей оцениваются через линейную интерполяцию. Другими словами, чем быстрее движется транспортное средство, тем выше задается частота очистки в режиме продувки воздухом.
[0203] На этапе S9 модуль 51 оценки операций очистки обнаруживает количество капель, прилипающих к поверхности 1a линзы, и корректирует частоту очистки в режиме продувки воздухом согласно этому количеству. В частности, коэффициент в 1 задается, если капли, прилипающие к поверхности 1a линзы, имеют стандартный размер, коэффициент, больший 1, задается, если капли превышают стандартный размер, и коэффициент, меньший 1, задается, если капли меньше стандартного размера, и корректируется частота очистки в режиме продувки воздухом.
[0204] На этапе S10 модуль 51 оценки операций очистки очищает поверхность 1a линзы в режиме продувки воздухом. В частности, в модуль 52 приведения в действие воздушного насоса выводится команда управления, инструктирующая активацию воздушного насоса 5 и выдачу сжатого воздуха. Таким образом, можно распылять сжатый воздух из выпускных отверстий 10a, 10b через концевые секции 14a, 14b воздушного канала 12 и очищать поверхность 1a линзы, удаляя капли, прилипающие к поверхности 1a линзы. Эта очистка в режиме продувки воздухом многократно выполняется с заданным временным интервалом согласно заданной частоте.
[0205] Между тем, если в процессе этапа S7 оценивается то, что погодные условия являются дождливыми (этап S7: "Да"), модуль 51 оценки операций очистки оценивает частоту налива очищающей жидкости согласно скорости рассматриваемого транспортного средства на этапе S11. В частности, данные, указывающие взаимосвязь между скоростью транспортного средства и частотой очистки в режиме непрерывного промывания, предварительно сохраняются в запоминающем устройстве (не показано), принадлежащем модулю 8 управления, и когда получается информация 31 скорости рассматриваемого транспортного средства, показанная на фиг. 34, при обращении к этим данным, частота очистки в режиме непрерывного промывания задается согласно информации скорости рассматриваемого транспортного средства. Например, частота для транспортного средства при движении на максимальной скорости задается равной максимальной частоте в каждые десять секунд, частота для транспортного средства при остановке задается равной минимальной частоте в каждые двадцать секунд, и частоты для промежуточных скоростей оцениваются через линейную интерполяцию. Другими словами, чем быстрее движется транспортное средство, тем выше задается частота очистки в режиме непрерывного промывания.
На этапе S12 модуль 51 оценки операций очистки обнаруживает количество капель, прилипающих к поверхности 1a линзы, и корректирует частоту очистки в режиме непрерывного промывания согласно этому количеству. В частности, коэффициент в 1 задается, если капли, прилипающие к поверхности 1a линзы, имеют стандартный размер, коэффициент, больший 1, задается, если капли превышают стандартный размер, и коэффициент, меньший 1, задается, если капли меньше стандартного размера, и корректируется частота очистки в режиме непрерывного промывания.
[0206] На этапе S13 модуль 51 оценки операций очистки очищает поверхность 1a линзы в режиме непрерывного промывания. Таким образом, можно распылять очищающую жидкость из выпускных отверстий 10a, 10b, наливать жидкость на поверхность 1a линзы и эффективно предотвращать прилипание загрязнения к поверхности 1a линзы. Эта очистка в режиме непрерывного промывания многократно выполняется с заданным временным интервалом согласно заданной частоте.
[0207] Таким образом, один из различных режимов очистки выбирается надлежащим образом согласно состоянию загрязнения поверхности 1a линзы и погодным условиям, т.е. тому, являются или нет погодные условия дождливыми, обеспечивая возможность очистки поверхности 1a линзы камеры с использованием оптимального режима очистки для этих условий.
В процессе, описанном выше, допустимо получать текущую позицию переключения коробки передач из информации 34 позиций переключения коробки передач и выполнять различные операции режима очистки только тогда, когда транспортное средство находится в диапазоне D (передач) и движется на или выше предварительно определенной скорости (к примеру, 30 км/ч).
[0208] В устройстве 100 для очистки линзы смонтированной на транспортном средстве камеры согласно настоящему варианту осуществления, как описано выше, воздушный канал 12 предоставляется на конце форсунки 7, каналы 11a, 11b для очищающей жидкости предоставляются около воздушного канала 12, и концевые секции 14a, 14b воздушного канала 12 и концевые секции 15a, 15b каналов 11a, 11b для очищающей жидкости задаются с возможностью объединяться. Таким образом, посредством выбора режима непрерывного промывания, в котором воздушный насос 5 прерывисто активируется многократно (например, четыре раза), чтобы подавать сжатый воздух в воздушный канал 12, при этом очищающая жидкость накоплена во вторичном бачке 13 посредством операции насоса 3 для подачи очищающей жидкости и распыляет сжатый воздух из концевых секций 14a, 14b, можно создавать отрицательное давление в каналах 11a, 11b для очищающей жидкости, извлекать очищающую жидкость из вторичного бачка 13 и прерывисто распылять очищающую жидкость через объединенные протоки 16a, 16b. Посредством пульверизации и распыления частиц очищающей жидкости через волны воздуха, можно эффективно очищать поверхность 1a линзы с малым количеством очищающей жидкости.
[0209] Также можно поддерживать поверхность 1a линзы в состоянии увлажнения посредством очищающей жидкости, препятствуя прилипанию загрязнения к поверхности 1a линзы. Кроме того, поскольку прерывистое промывание выполняется с использованием очищающей жидкости, хранящейся во вторичном бачке 13, может уменьшаться количество очищающей жидкости, используемое для того, чтобы выполнять очистку.
[0210] Посредством распыления очищающей жидкости на поверхность 1a линзы с использованием режима непрерывного промывания, когда погодные условия являются дождливыми, можно предотвращать прилипания загрязнения к поверхности 1a линзы вследствие разбрызгивания грязи, дождевой воды и т.п. Кроме того, частота непрерывного промывания увеличивается по мере того, как возрастает скорость транспортного средства, обеспечивая возможность распыления очищающей жидкости надлежащим образом согласно скорости.
[0211] Посредством действия воздушного насоса 5, когда прекращается подача очищающей жидкости, сжатый воздух может быть распылен в режиме продувки воздухом, обеспечивая возможность удаления воды, прилипающей к поверхности 1a линзы. Посредством выбора режима продувки воздухом, когда отсутствует загрязнение на поверхности 1a линзы, и погодные условия являются дождливыми, может надежно удаляться дождевая вода, прилипающая к поверхности 1a линзы после разбрызгивания посредством транспортного средства при движении, позволяя камере 1 захватывать четкое изображение. Поскольку частота очистки в режиме продувки воздухом увеличивается по мере того, как возрастает скорость транспортного средства, капли могут удаляться надлежащим образом согласно скорости.
[0212] Посредством подачи сжатого воздуха в воздушный канал 12 и распыления воздуха из концевых секций 14a, 14b, можно выполнять режим очистки под давлением, в котором отрицательное давление создается в каналах 11a, 11b для очищающей жидкости, извлекая очищающую жидкость и смешивая очищающую жидкость и сжатый воздух в объединенных протоках 16a, 16b, после чего смесь распыляется на поверхность 1a линзы. Таким образом, можно превращать очищающую жидкость в аэрозоль, что позволяет уменьшать количество очищающей жидкости, необходимое для очистки. Когда загрязнение образуется на поверхности 1a линзы, очистка выполняется в режиме очистки, обеспечивающем возможность немедленной очистки всех загрязнений, образующихся на поверхности 1a линзы.
[0213] Кроме того, выдается предупреждение, если загрязнение не удаляется, несмотря на выполнение очистки в режиме очистки под давлением предварительно определенное число раз, позволяя привлекать внимание водителя к присутствию загрязнения на поверхности 1a линзы.
[0214] В устройстве 100 для очистки линзы смонтированной на транспортном средстве камеры согласно настоящему варианту осуществления, один из режима очистки под давлением, режима продувки воздухом и режима непрерывного промывания выбирается надлежащим образом для того, чтобы очищать поверхность 1a линзы, обеспечивая возможность очистки поверхности 1a линзы согласно режиму, подходящему для условий вождения.
[0215] Выше приведено описание устройства для очистки линзы смонтированной на транспортном средстве камеры согласно настоящему изобретению на основе проиллюстрированного варианта осуществления, но настоящее изобретение не ограничено этим, и конфигурации различных его частей могут быть заменены любой требуемой конфигурацией, демонстрирующей аналогичную функциональность.
[0216] Например, в варианте осуществления, описанном выше, приведен пример, в котором один воздушный канал 12 и два канала для очищающей жидкости предоставляются в форсунке 7, и они объединяются с возможностью формировать два объединенных протока 16a, 16b, но настоящее изобретение не ограничено такой компоновкой, и также возможна компоновка, в которой один или более воздушных каналов и один или более каналов для очищающей жидкости объединяются в концевой секции.
В варианте осуществления, описанном выше, сжатый воздух и очищающая жидкость объединяются на конце форсунки 7, но настоящее изобретения не ограничивается такой компоновкой, и также возможна компоновка, в которой воздушный канал и канал для очищающей жидкости располагаются рядом друг с другом, и отрицательное давление, создаваемое, когда сжатый воздух вытесняется из воздушного канала, используется для того, чтобы превращать в аэрозоль и распылять очищающую жидкость, подаваемую из канала для очищающей жидкости. В этом случае, концевые секции 14a, 15a и 14, 15b, показанные на фиг. 31(b), не объединяются, и распыление выполняется из этих рядом расположенных концевых секций.
[0217] Устройство 1 обнаружения трехмерных объектов согласно настоящему варианту осуществления настоящего изобретения, которое конфигурируется и работает так, как описано выше, обеспечивает следующие преимущества.
(1) В соответствии с устройством 1 обнаружения трехмерных объектов настоящего варианта осуществления, когда линза 11 очищается с использованием очищающей жидкости, процесс обнаружения и процесс оценки трехмерных объектов останавливаются, в зависимости от влажности линзы, таким образом, что поддерживаются результаты обнаружения или результаты оценки от момента до того, как очищена линза, посредством этого предотвращая такие ошибочные оценки, как изменение уже обнаруженного трехмерного объекта на необнаруженный в результате процесса очистки линзы или изменение необнаруженного трехмерного объекта на обнаруженный в результате процесса очистки линзы. Это обеспечивает предотвращение снижения точности результатов обнаружения, вызываемых посредством очистки линзы 11, что позволяет предоставлять устройство 1 обнаружения трехмерных объектов, которое обнаруживает другие транспортные средства, движущиеся в областях обнаружения, с высоким уровнем точности. Это преимущество аналогично демонстрируется независимо от того, обнаруживаются другие транспортные средства VX с использованием информации формы разностного сигнала или с использованием информации краев.
[0218] (2) В соответствии с устройством 1 обнаружения трехмерных объектов настоящего варианта осуществления, непосредственно предшествующие результаты обнаружения сохраняются в течение предварительно определенной продолжительности, и оценки того, представляют или нет обнаруженные трехмерные объекты собой другие транспортные средства VX, и их вывод прерываются в течение предварительно определенной продолжительности только тогда, когда трехмерный объект обнаружен до перехода в состояние, подлежащее управлению, в результате очистки линзы, посредством этого обеспечивая возможность обнаружения другого транспортного средства VX с высокой точностью на основе высоконадежных результатов обнаружения/оценки, указывающих то, что другое транспортное средство VX обнаружено от момента до того, как ощущаются эффекты очистки линзы.
[0219] (3) В соответствии с устройством 1 обнаружения трехмерных объектов настоящего варианта осуществления, в ходе процесса обнаружения трехмерных объектов с использованием информации формы разностного сигнала, процесс, который минимизирует некорректное обнаружение других транспортных средств VX, может быть избирательно выполнен в ходе процесса очистки линзы или во втором состоянии, подлежащем управлению, в котором имеется существенная тенденция к снижению точности обнаружения других транспортных средств VX вследствие очищающей жидкости, прилипающей к линзе 11, посредством этого позволяя уменьшать нагрузку по обработке и исключать избыточные процессы остановки. Как результат, другие транспортные средства VX могут быть обнаружены с большей точностью.
[0220] (4) В соответствии с устройством 1 обнаружения трехмерных объектов настоящего варианта осуществления, чем больше число раз, когда продувается воздух, тем в большей степени уменьшается влияние количества очищающей жидкости на линзе 11 на информацию формы разностного сигнала; посредством этого предварительно определенная продолжительность, в течение которой сохраняются результаты обнаружения от момента непосредственно перед тем, как линза оценена как находящаяся во втором состоянии, подлежащем управлению, может сокращаться для того, чтобы приоритезировать результаты обнаружения в реальном времени.
[0221] (5) В соответствии с устройством 1 обнаружения трехмерных объектов настоящего варианта осуществления, в ходе процесса обнаружения трехмерных объектов с использованием информации краев, процесс, который минимизирует некорректное обнаружение других транспортных средств VX, может быть избирательно выполнен в ходе процесса очистки линзы или в первом состоянии, подлежащем управлению, в котором имеется существенная тенденция к снижению точности обнаружения других транспортных средств VX вследствие очищающей жидкости, прилипающей к линзе 11, посредством этого позволяя уменьшать нагрузку по обработке и исключать избыточные процессы остановки. Как результат, другие транспортные средства VX могут быть обнаружены с большей точностью.
[0222] (6) В соответствии с устройством 1 обнаружения трехмерных объектов настоящего варианта осуществления, когда оценено, что состояние линзы представляет собой третье состояние, подлежащее управлению, в котором очищающая жидкость, перемещающаяся по линзе вследствие воздуха, прерывисто продуваемого в ходе этапа сушки, влияет на изменение во времени в информации формы разностного сигнала/информации краев, что приводит к существенной тенденции к пониженной точности при обнаружении относительной скорости трехмерных объектов, процесс обнаружения относительной скорости избирательно останавливается, обеспечивая уменьшение нагрузки по обработке и препятствуя выполнению избыточных процессов остановки. Как результат, другие транспортные средства VX могут быть обнаружены с большей точностью.
[0223] Вышеуказанная камера 10 является эквивалентной камере согласно настоящему изобретению, вышеуказанный модуль 31 преобразования точки обзора является эквивалентным средству преобразования изображений согласно настоящему изобретению, вышеуказанные модуль 32 совмещения и модуль 33 обнаружения трехмерных объектов являются эквивалентными средству обнаружения трехмерных объектов согласно настоящему изобретению, вышеуказанные модуль 35 вычисления яркостного различия, модуль 36 обнаружения линий краев и модуль 37 обнаружения трехмерных объектов являются эквивалентными средству обнаружения трехмерных объектов согласно настоящему изобретению, вышеуказанный модуль 34 оценки трехмерных объектов является эквивалентным средству оценки трехмерных объектов, вышеуказанный модуль 38 оценки состояния линзы является эквивалентным средству оценки состояния линзы, вышеуказанный контроллер 39 является эквивалентным средству управления, вышеуказанный датчик 20 скорости транспортного средства является эквивалентным датчику скорости транспортного средства, и устройство 100 для очистки линзы является эквивалентным средству очистки линзы.
[0224] Модуль совмещения 21 из настоящего варианта осуществления совмещает позиции изображений вида "с высоты птичьего полета", захваченных в разные моменты времени в виде "с высоты птичьего полета", чтобы получать совмещенное изображение вида "с высоты птичьего полета"; этот процесс "совмещения" может выполняться с уровнем точности, подходящим для типа обнаруживаемого объекта, или с требуемом уровнем точности обнаружения. Процесс совмещения может быть более строгим процессом, в котором позиции совмещаются на основе идентичного времени и позиций, либо менее строгим процессом, заключающим в себе просто выяснение координат в изображении вида "с высоты птичьего полета".
ССЫЛОЧНЫЕ ПОЗИЦИИ
[0225] 1 - устройство обнаружения трехмерных объектов
10 - камера
11 - линза
20 - датчик скорости транспортного средства
30 - компьютер
31 - модуль преобразования точки обзора
32 - модуль совмещения
33, 37 - модуль обнаружения трехмерных объектов
34 - модуль оценки трехмерных объектов
35 - модуль вычисления яркостного различия
36 - модуль обнаружения краев
38 - модуль оценки состояния линзы
39 - модуль управления
40 - модуль обнаружения размытостей
100 - устройство для очистки линзы
110 - устройство управления
101 - бачок для очищающей жидкости
102 - проток очищающей жидкости
103a, 103b - наливной раструб
104 - воздушный компрессор
105 - путь воздушного потока
106a, 106b - струйный раструб
a - угол обзора
A1, A2 - область обнаружения
CP - пересечение
DP - разностный пиксел
DWt, DWt′ - форма разностного сигнала
DWt1-DWm, DWm+k-DWtn - малая область
L1, L2 - линия контакта с землей
La, Lb - линии в направлении сплющивания трехмерного объекта
P - захваченное изображение
PBt - изображение вида "с высоты птичьего полета"
PDt - разностное изображение
MP - изображение с маской
S - размытость
SP - изображение с размытостью
SBt - изображение вида "с высоты птичьего полета" с размытостью
V - рассматриваемое транспортное средство
VX - другое транспортное средство
ССЫЛОЧНЫЕ ПОЗИЦИИ, ОТНОСЯЩИЕСЯ К УСТРОЙСТВУ ДЛЯ ОЧИСТКИ ЛИНЗЫ СОГЛАСНО ВТОРОМУ ВАРИАНТУ ОСУЩЕСТВЛЕНИЯ
1 - камера
1a - поверхность линзы
1b - верхняя поверхность
2 - бачок с резервуаром для очищающей жидкости
3 - насос для подачи очищающей жидкости
4 - трубка для очищающей жидкости
5 - воздушный насос
6 - воздуховод
7 - форсунка
7a - поверхность для распыления
7b - боковая поверхность
7c - нижняя поверхность
7d - крышка
8 - модуль управления
10a, 10b - выпускное отверстие
11a, 11b - канал для очищающей жидкости
12 - воздушный канал
13 - вторичный бачок
13a, 13b - соединитель
13c - подающий раструб
13d - нижняя поверхность
14a, 14b - концевая секция
15a, 15b - концевая секция
16a, 16b - объединенный проток
22 - модуль форсунки
23 - трубка
24 - контрольный клапан
25 - вентиляционное отверстие
30 - информация транспортного средства
31 - информация скорости транспортного средства
32 - информация переключателя стеклоочистителя
33 - информация переключателя стеклоомывателя
34 - информация позиций переключения коробки передач
35 - информация переключателя света передних фар
41 - информация изображений, снятых камерой
51 - модуль оценки операций очистки
52 - модуль приведения в действие воздушного насоса
53 - модуль приведения в действие насоса для подачи очищающей жидкости
54 - модуль выдачи уведомлений
55 - модуль оценки операций очистки
55 - модуль оценки состояния
61 - модуль сигнализации
100 - устройство для очистки
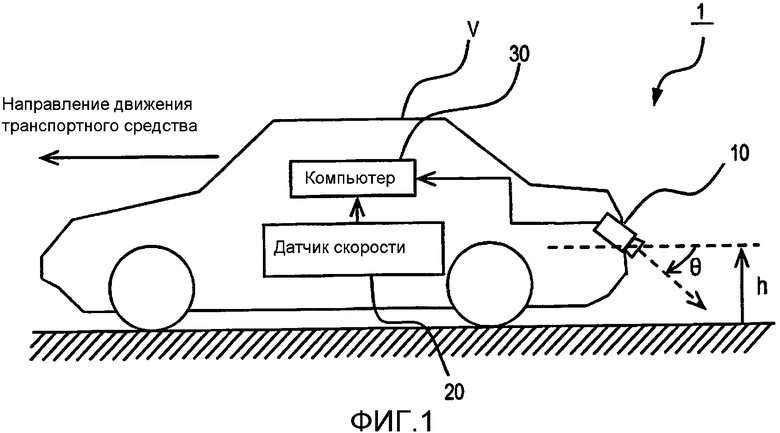
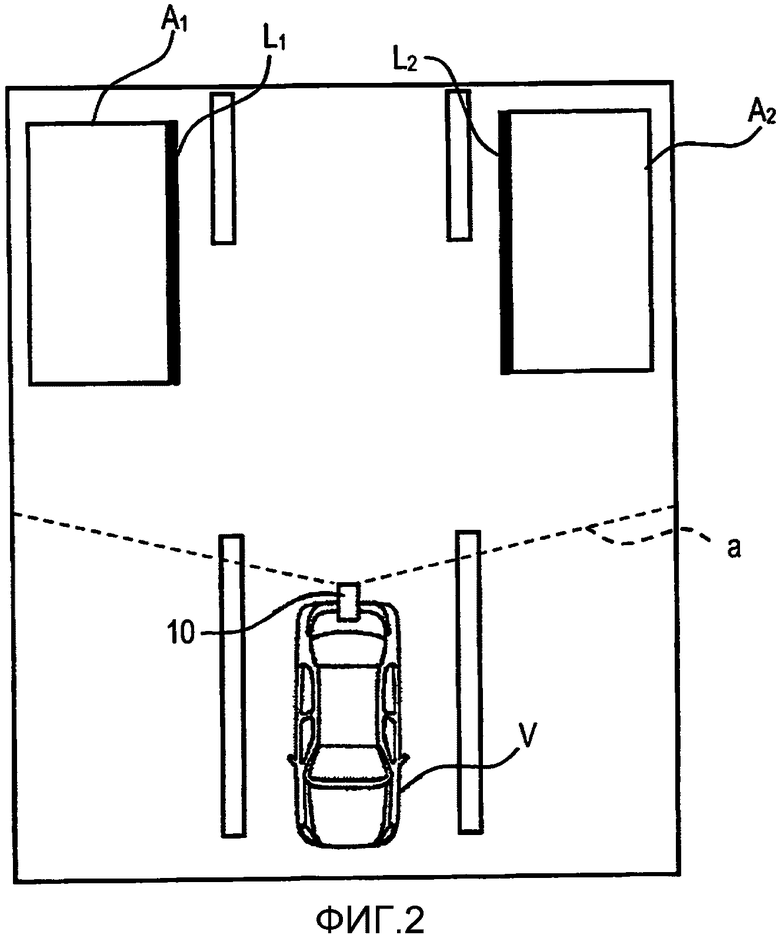
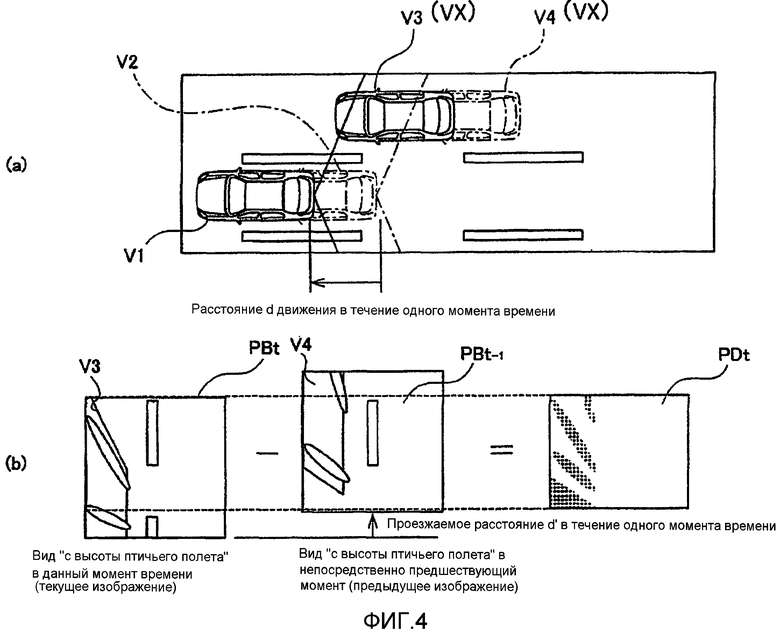
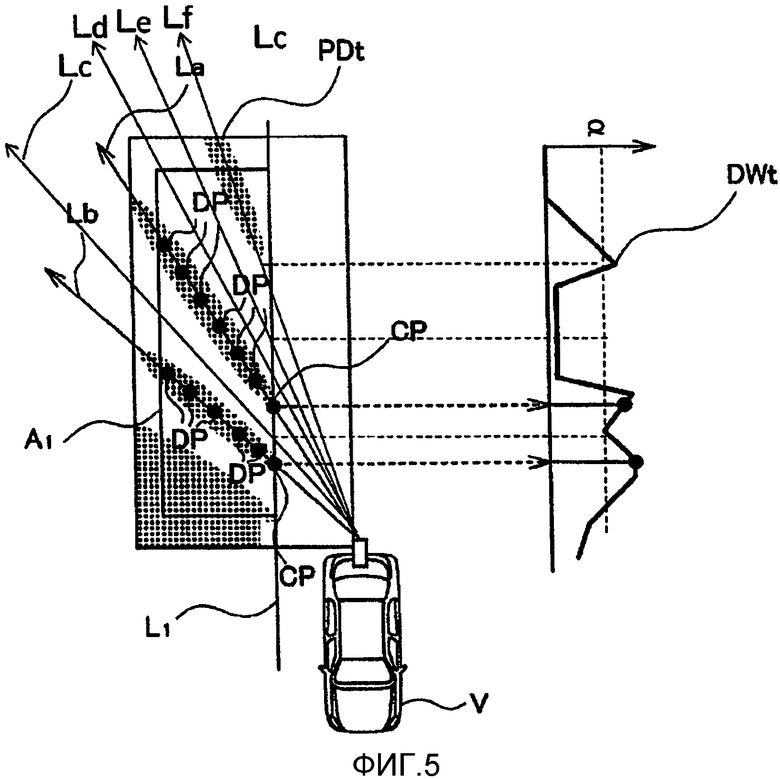
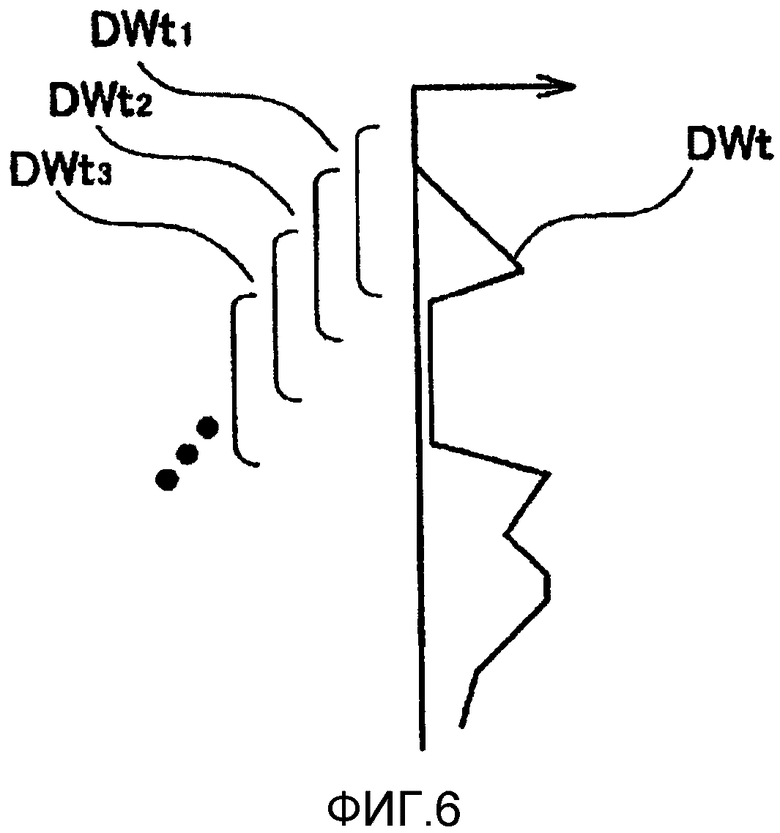
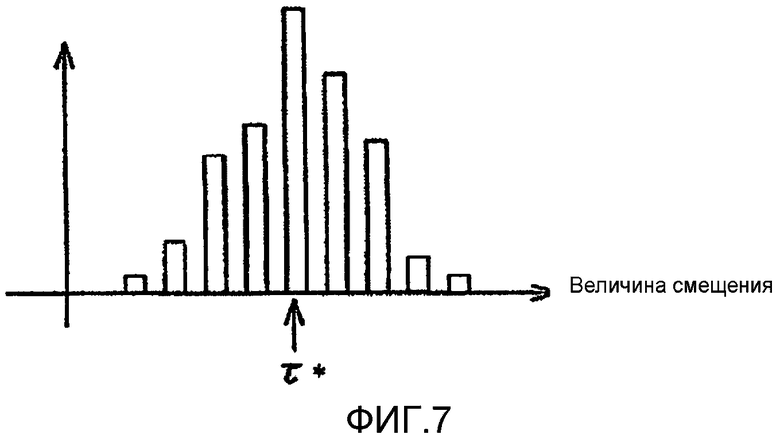
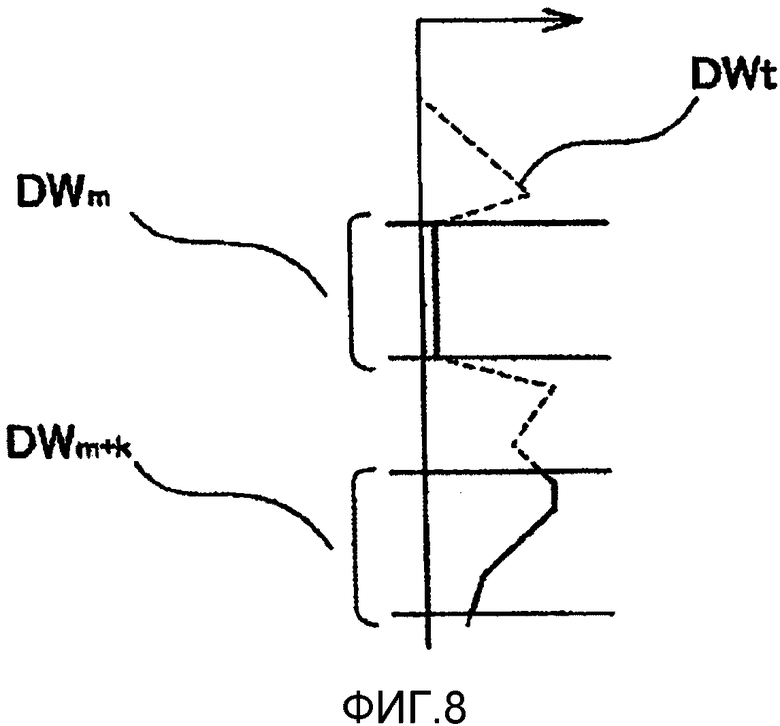
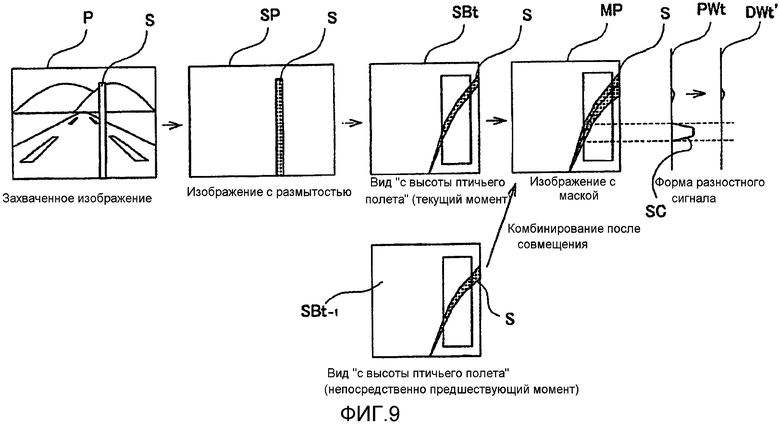
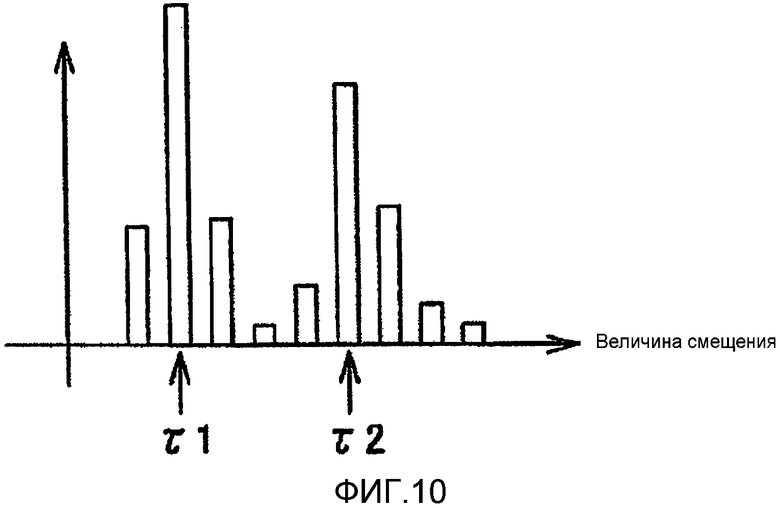
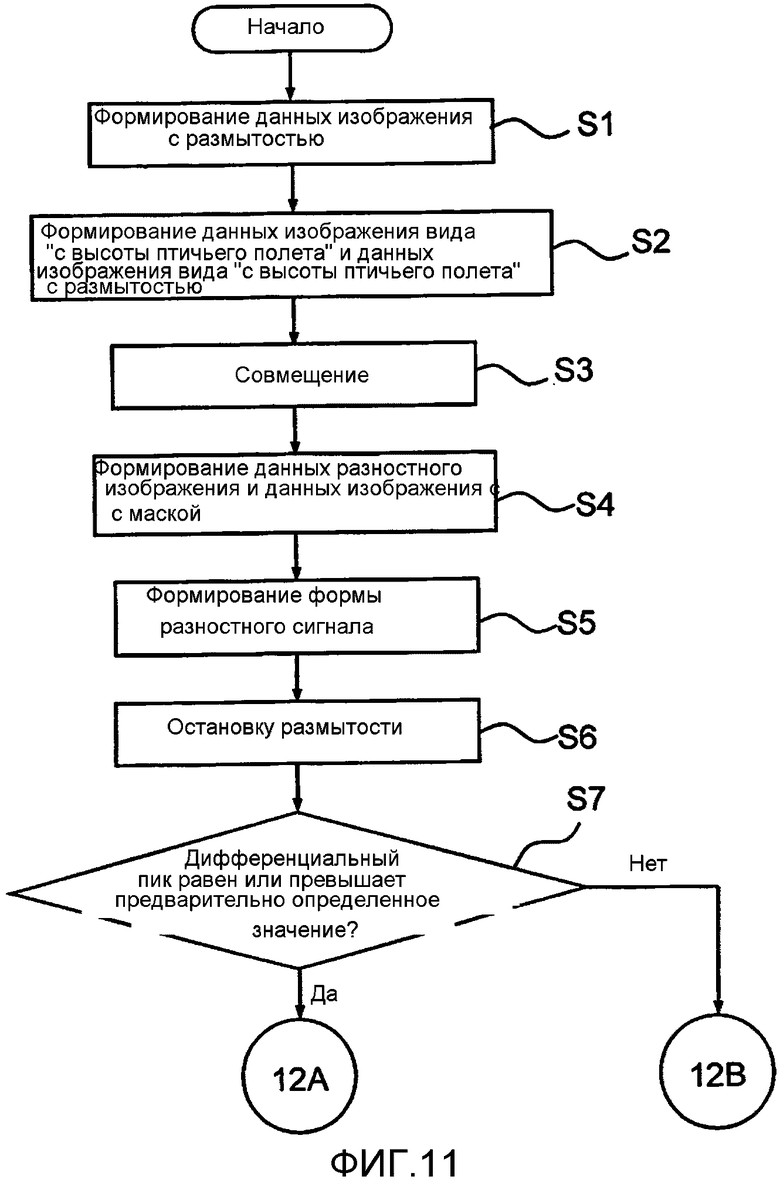
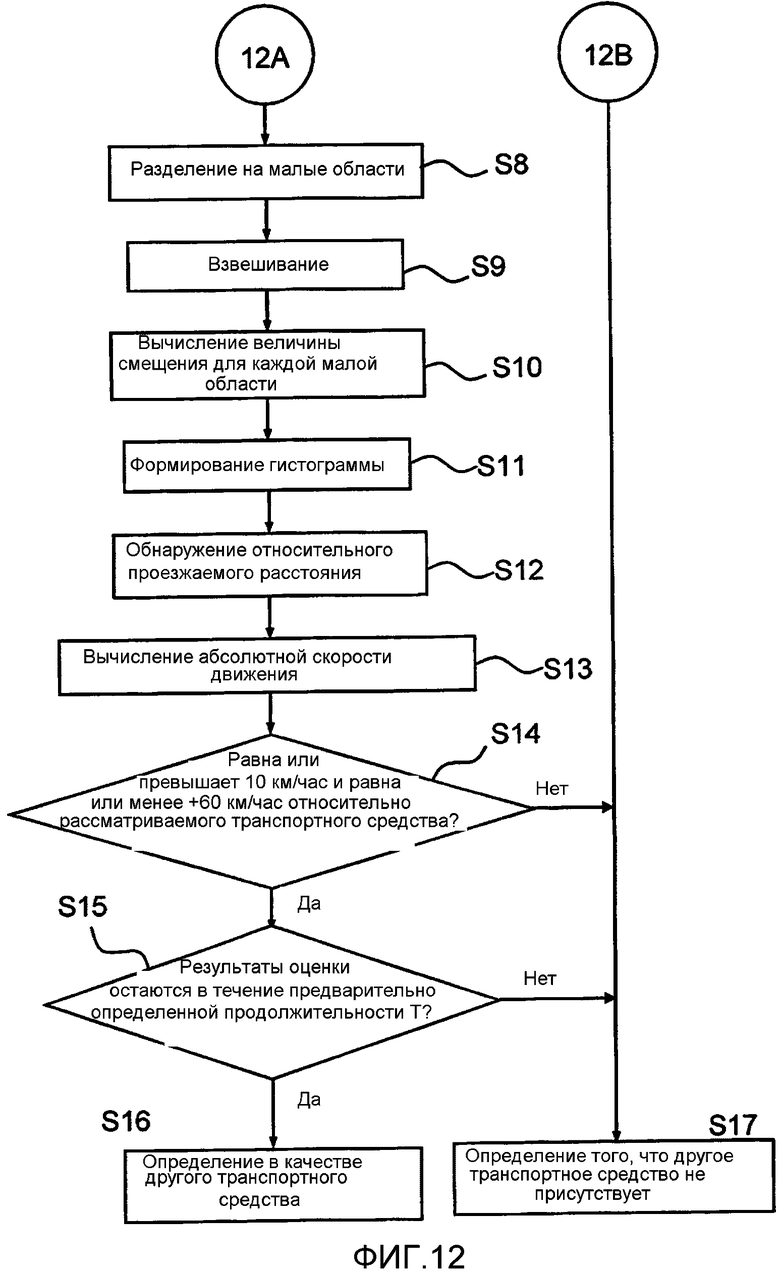
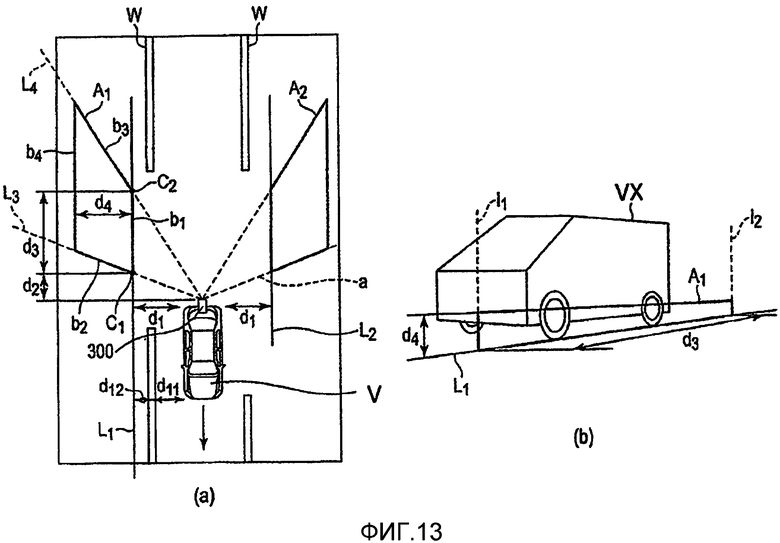
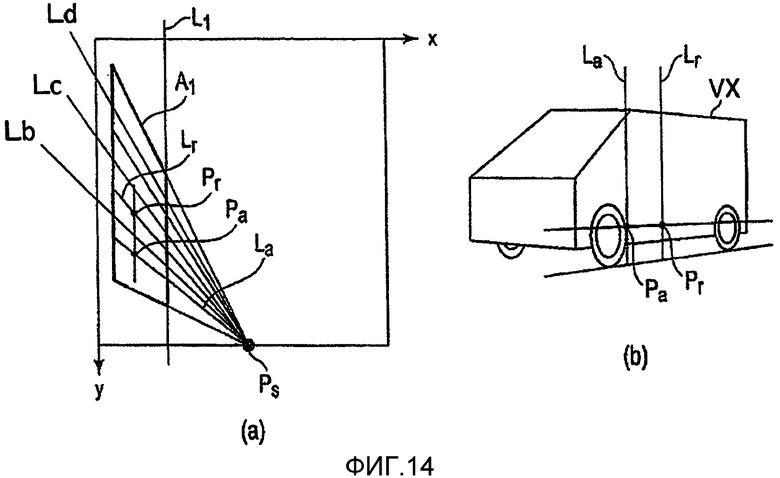
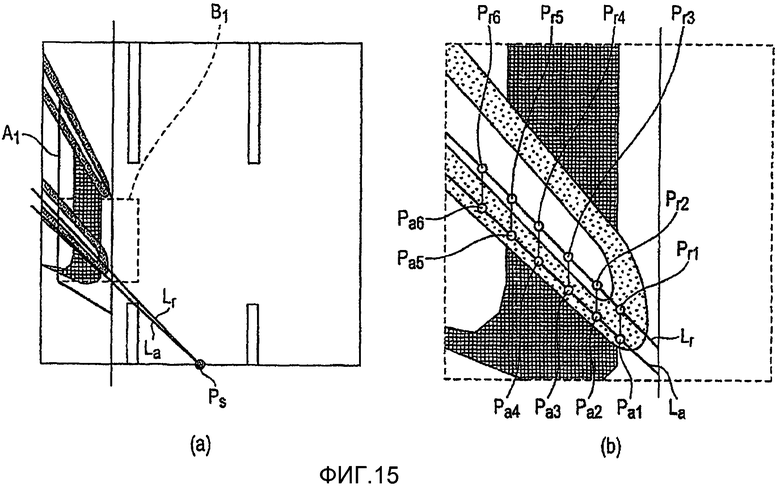
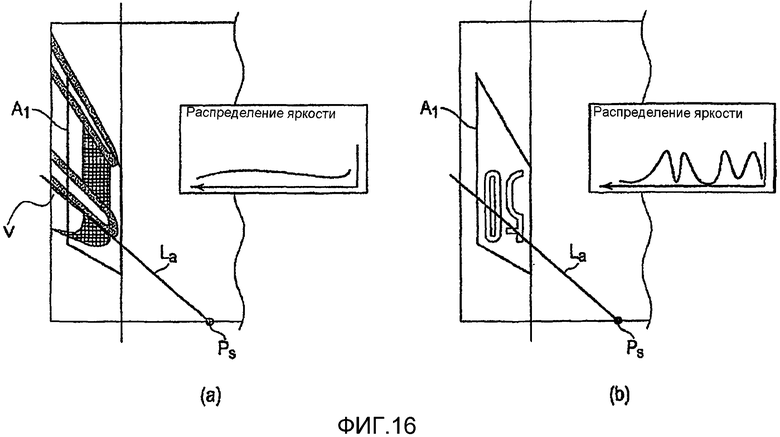
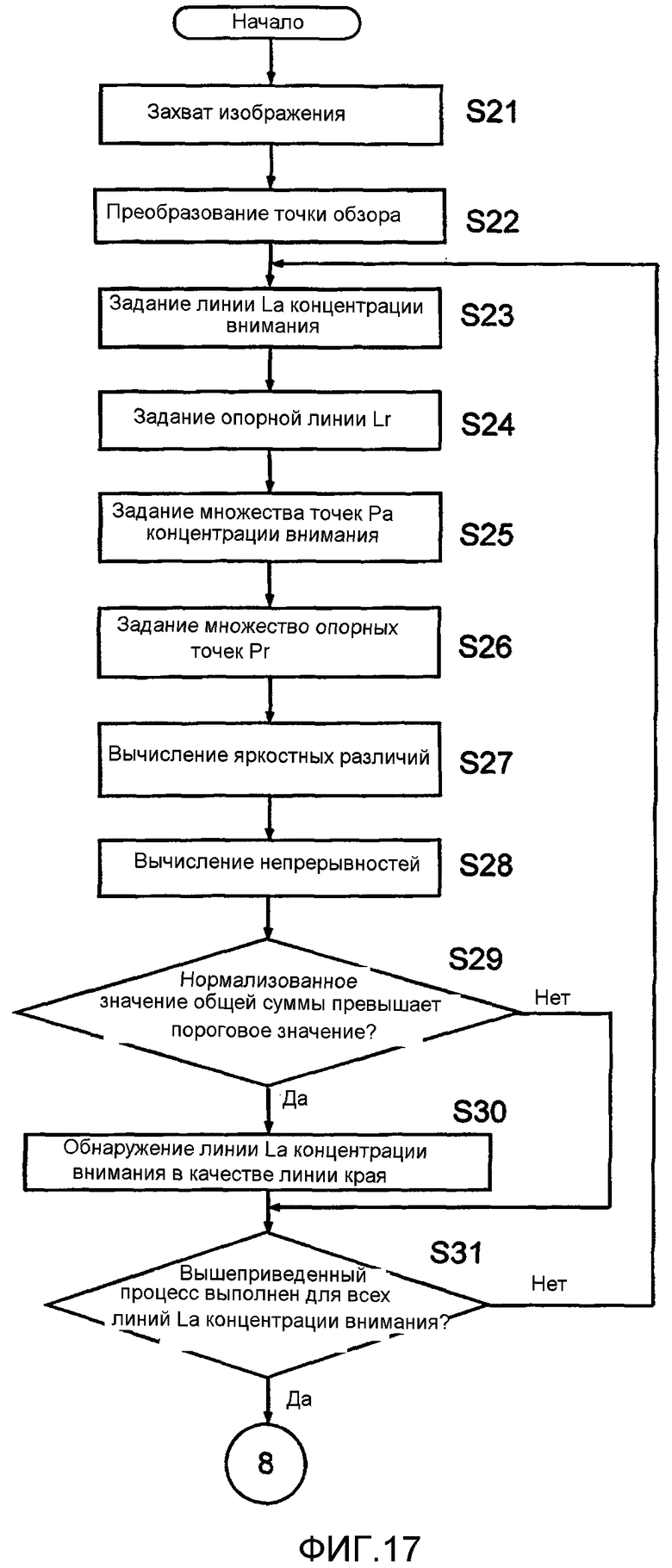
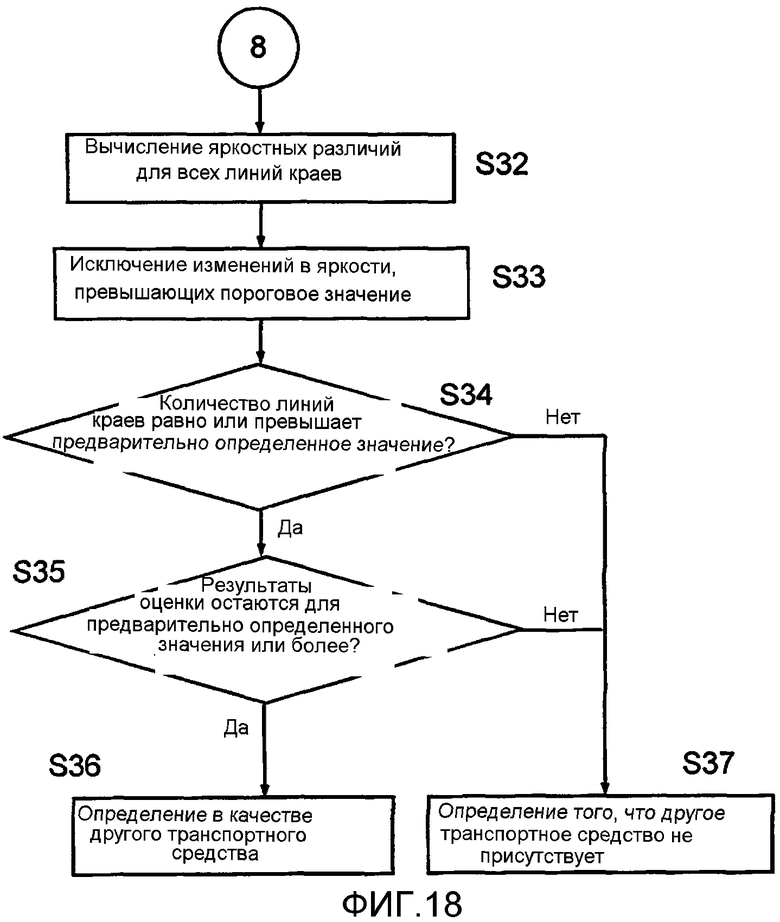
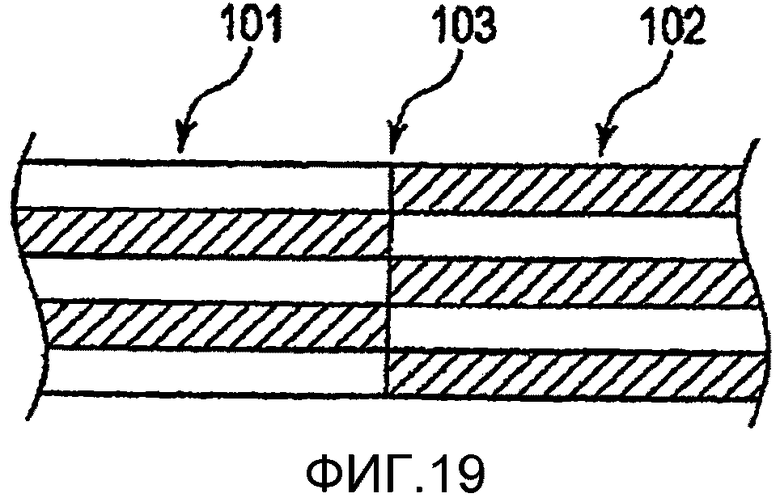
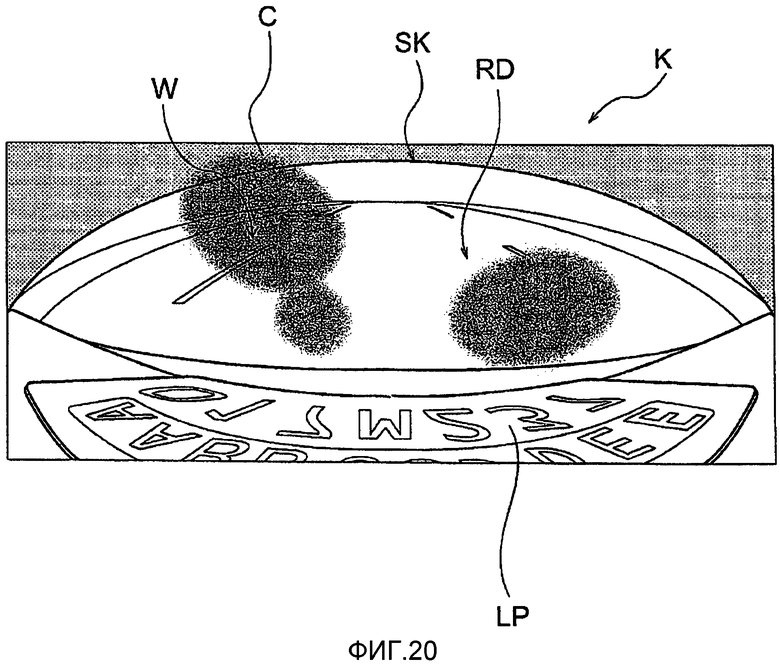
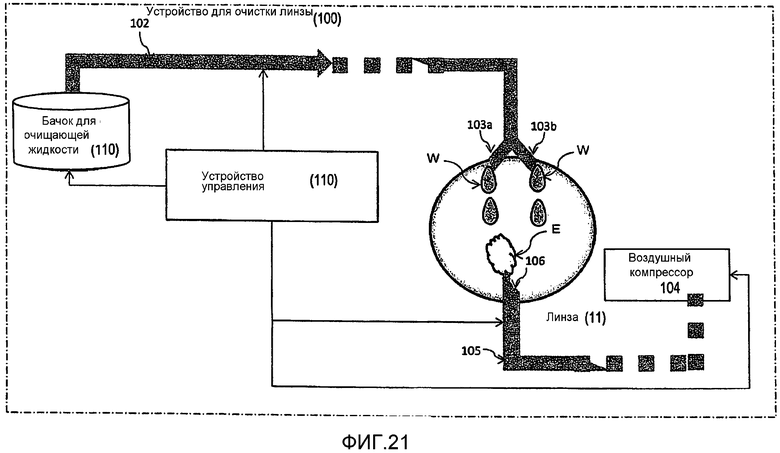
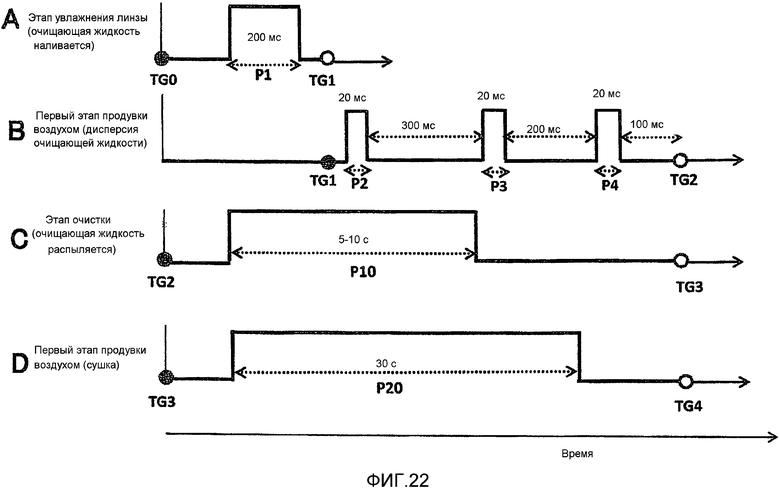
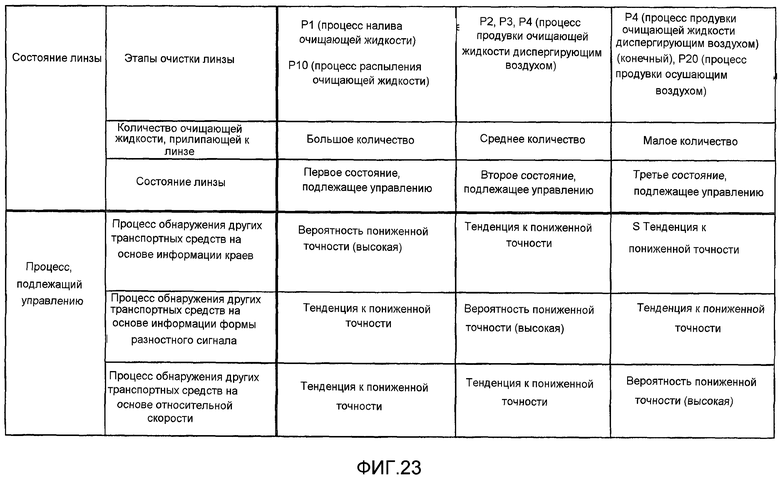
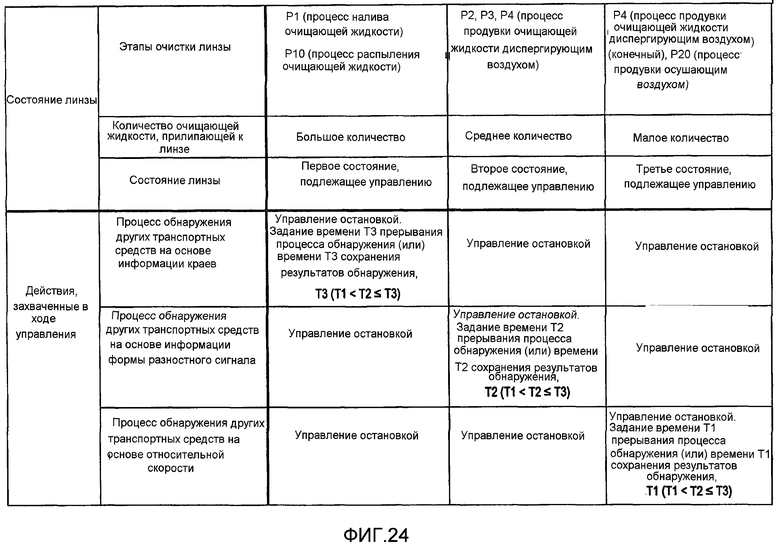
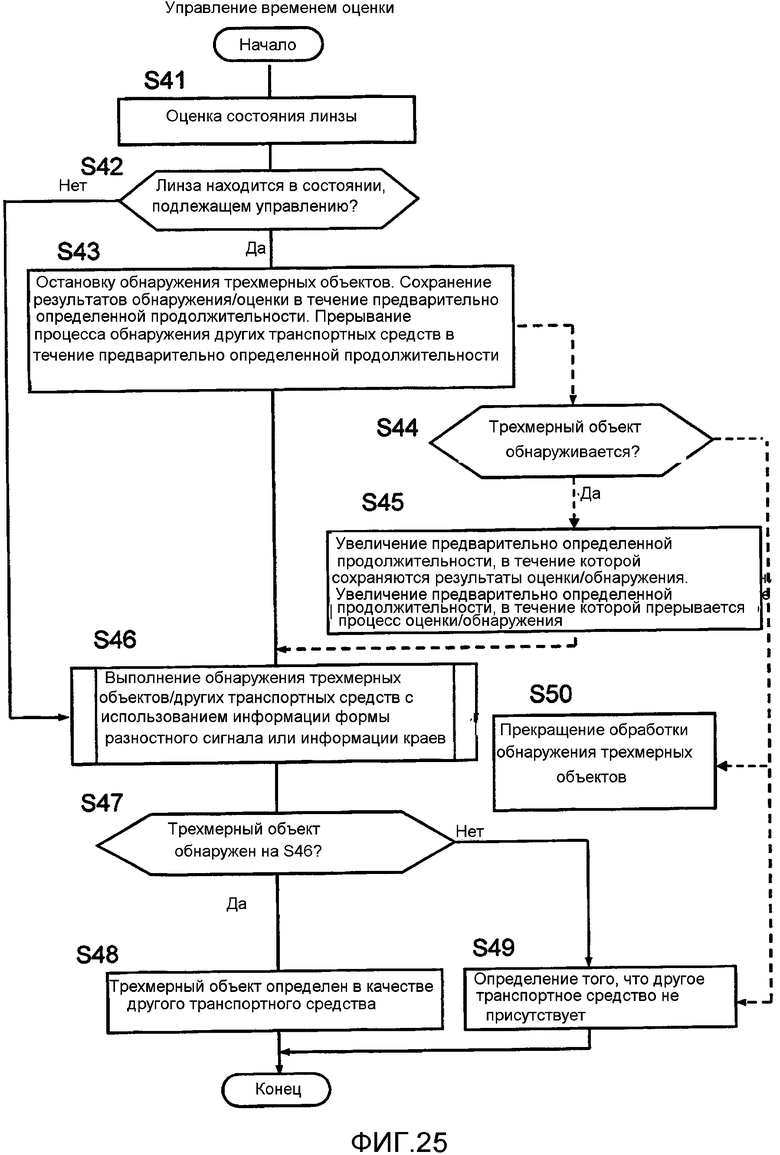
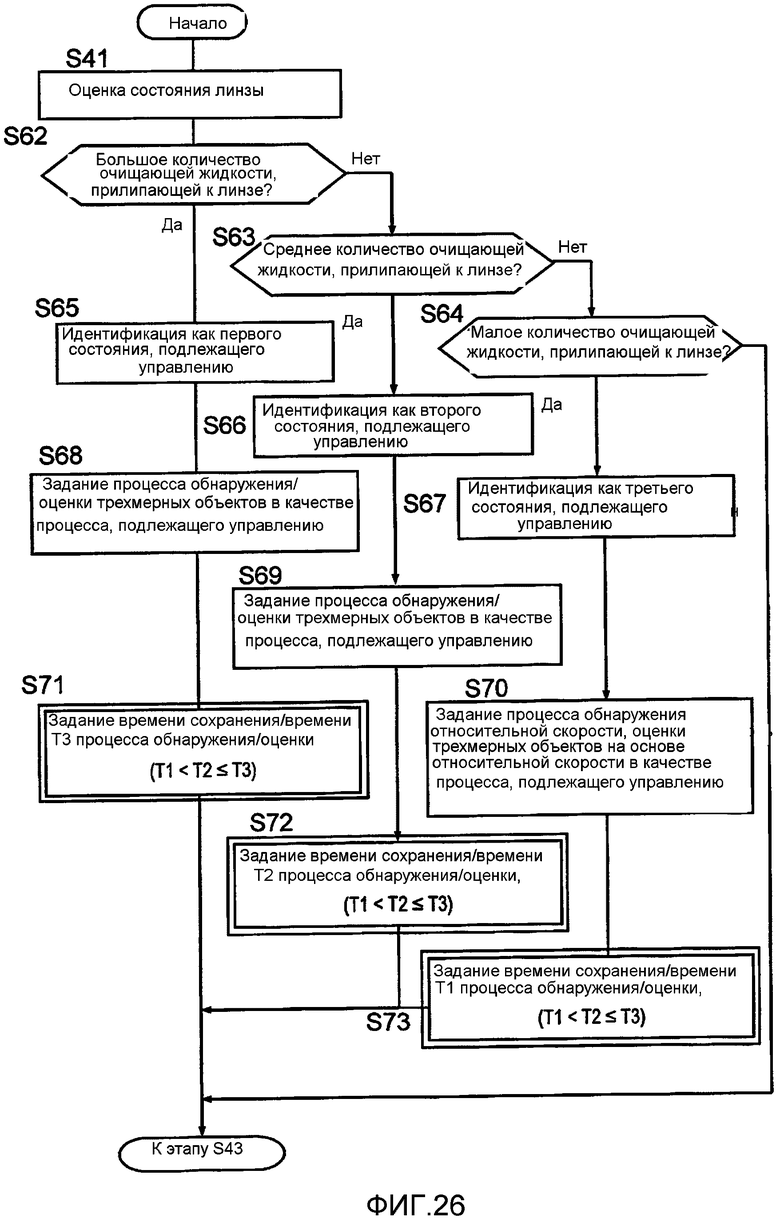
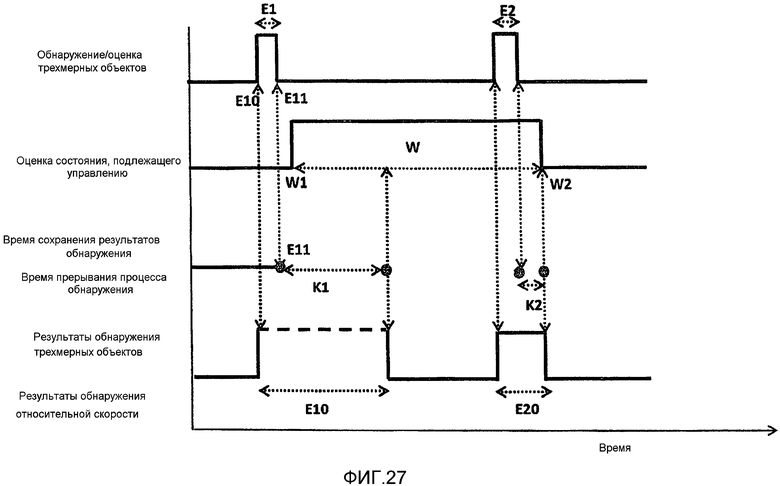
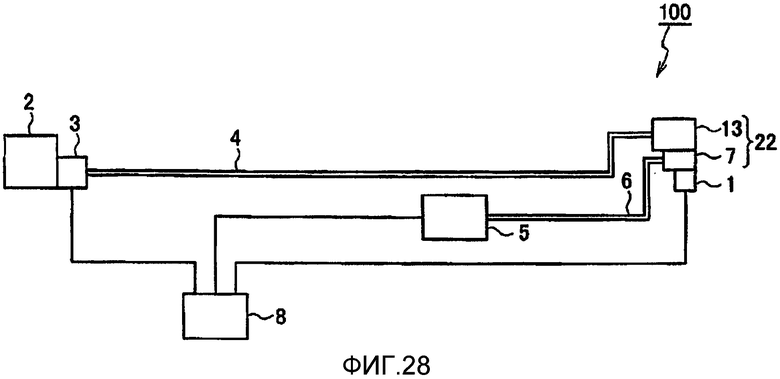
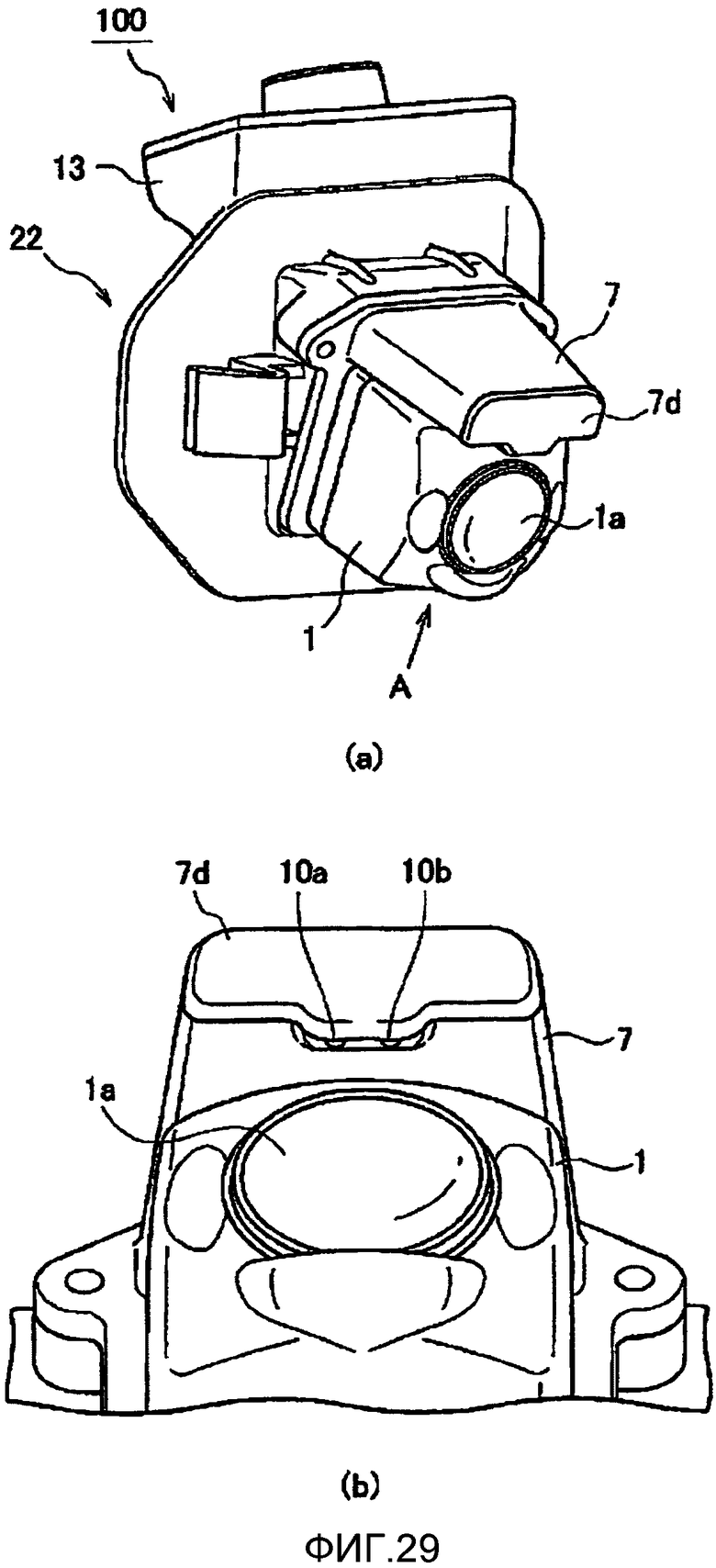
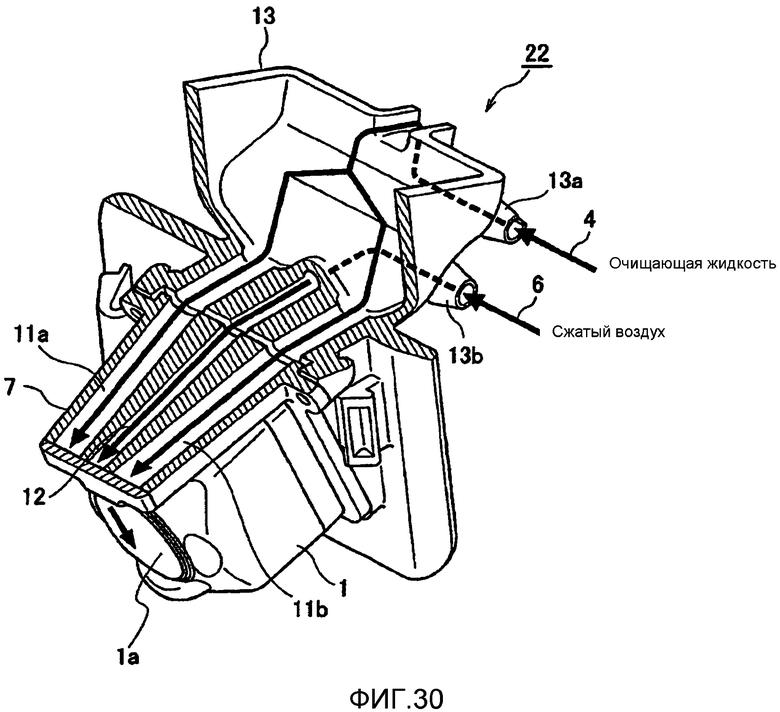
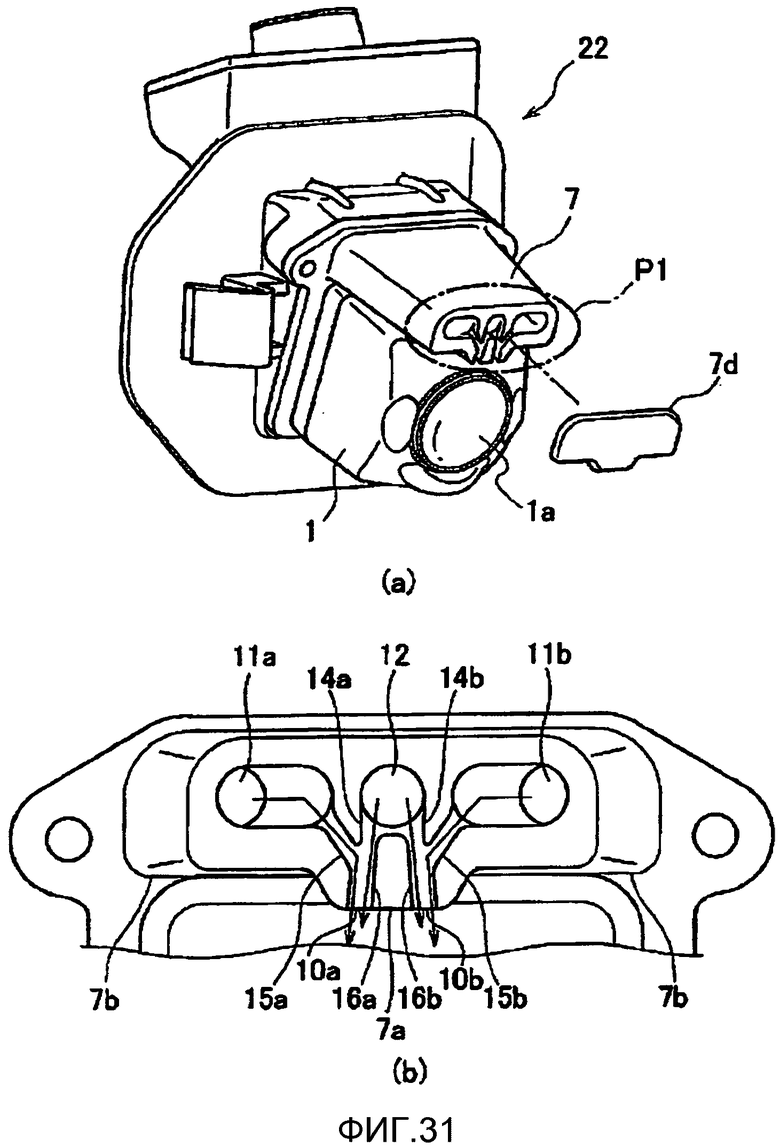
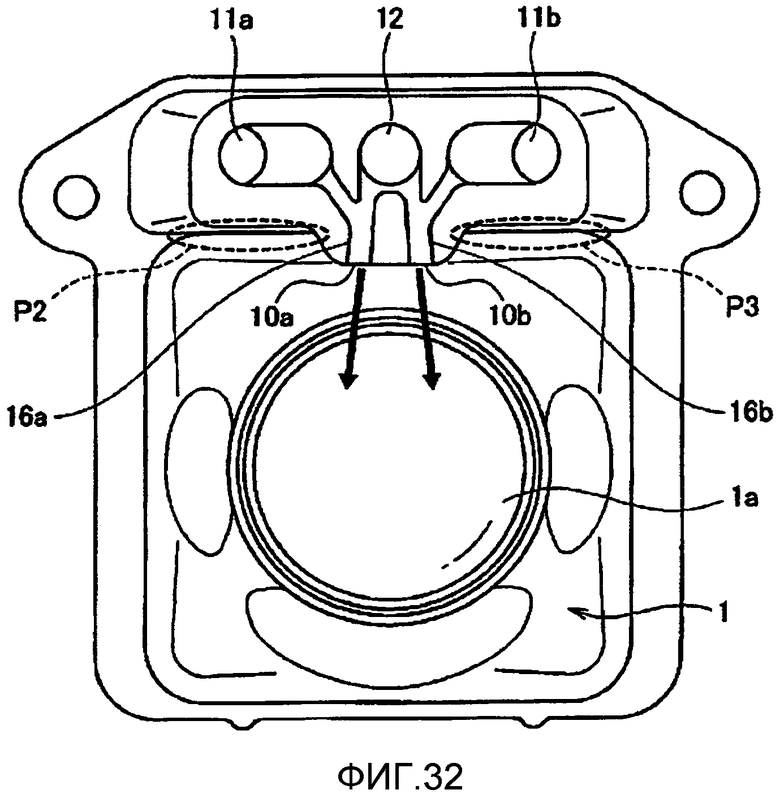
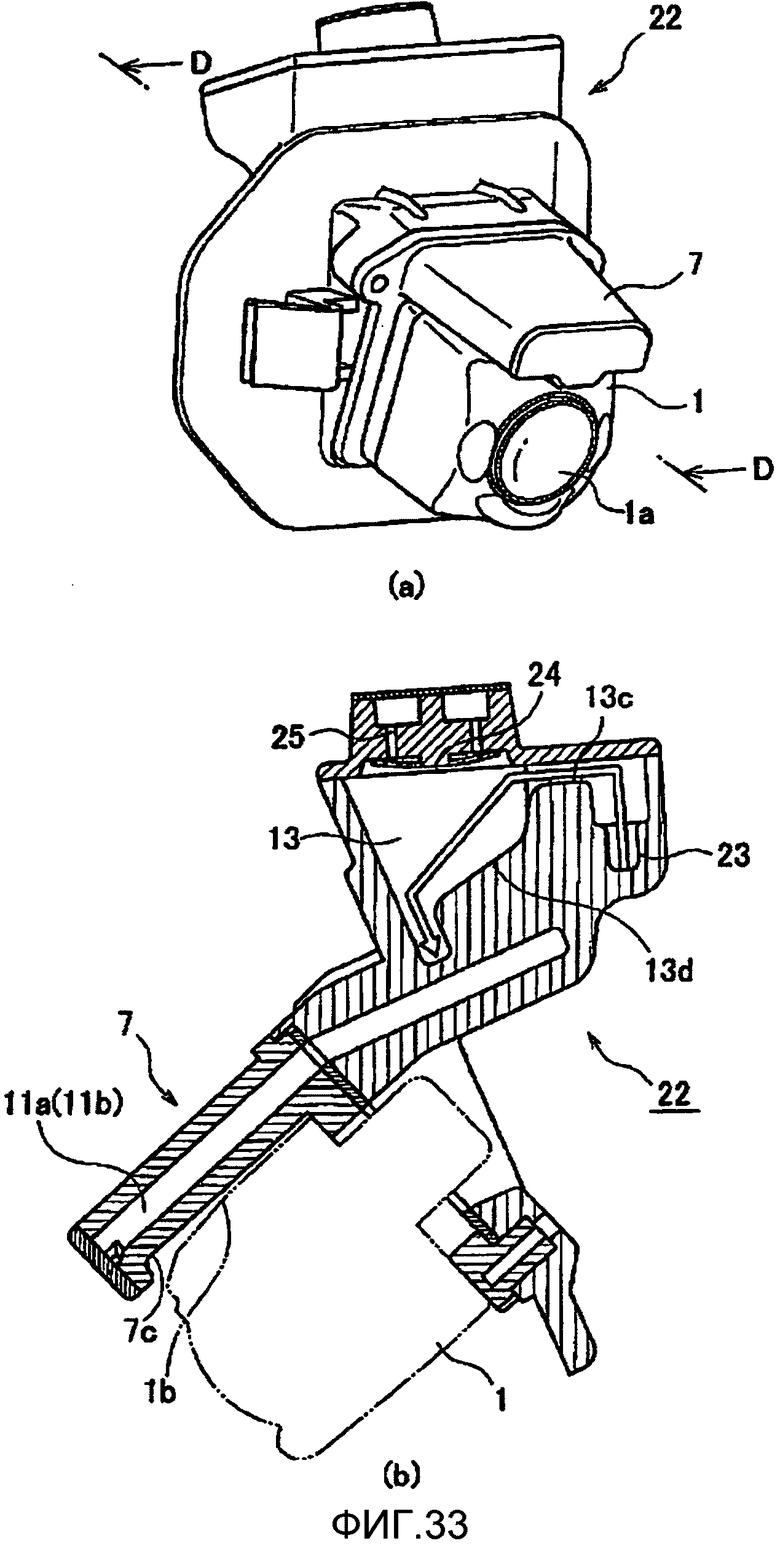
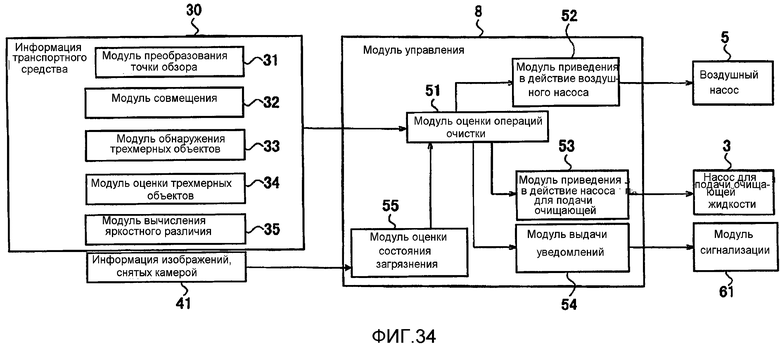
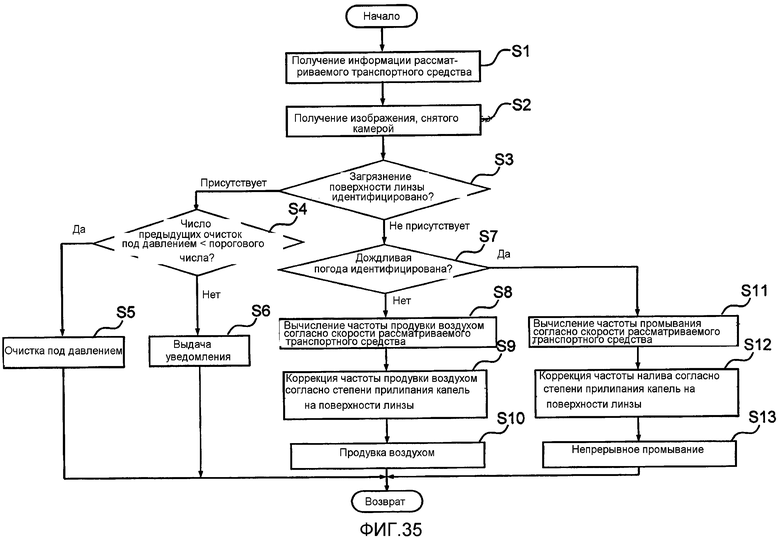
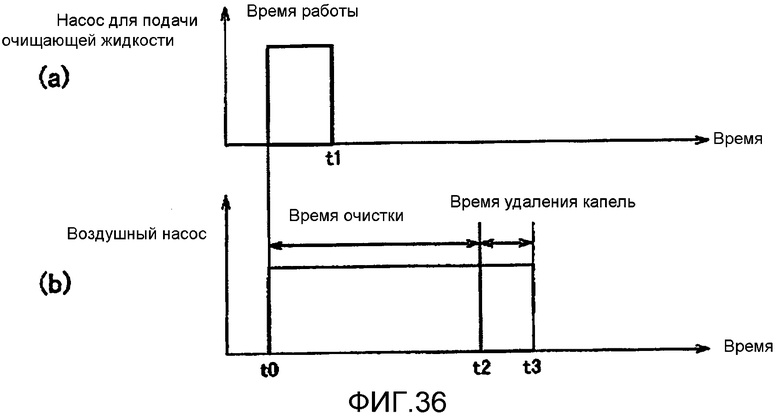
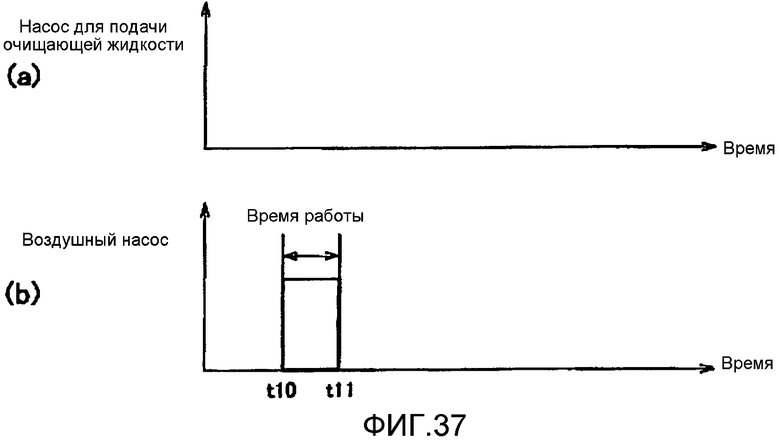
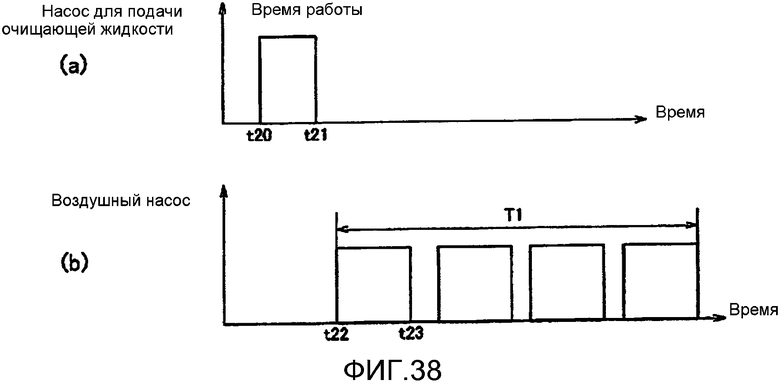
Группа изобретений относится к способу и устройству обнаружения трехмерных объектов. Устройство содержит: камеру (10) для захвата изображения области сзади транспортного средства, модуль (33) обнаружения трехмерных объектов для обнаружения трехмерного объекта сзади транспортного средства на основе полученного изображения, устройство (100) для очистки линзы для очистки линзы (11) камеры (10) с использованием очищающей жидкости согласно предварительно определенному этапу очистки линзы, модуль (38) оценки состояния линзы для оценки того, является или нет состояние линзы (11) предварительно определенным состоянием, подлежащим управлению, на основе времени, когда очищающая жидкость распыляется на линзу на этапе очистки линзы, и модуль (39) управления для остановки обнаружения трехмерных объектов, когда состояние линзы оценивается в качестве состояния, подлежащего управлению, посредством сохранения, в течение предварительно определенной продолжительности, результатов обнаружения или оценки от момента непосредственно перед тем, как состояние линзы оценено в качестве состояния, подлежащего управлению. Обеспечивается повышение точности изображения, даже когда очищающая жидкость распылена на линзу. 2 н. и 9 з.п. ф-лы, 38 ил.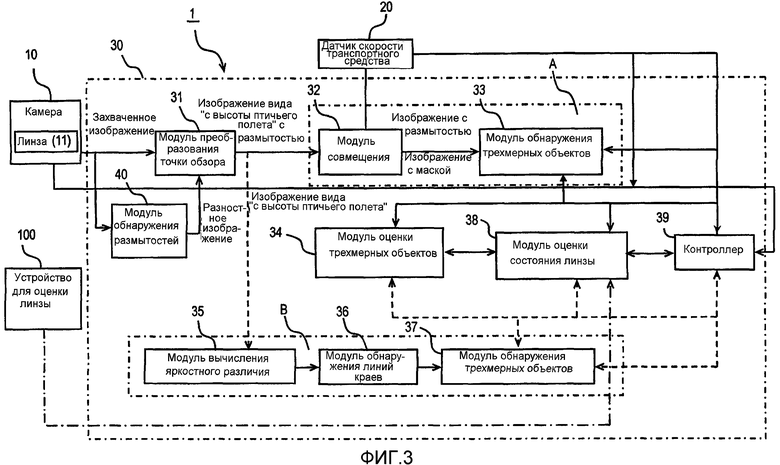
1. Устройство обнаружения трехмерных объектов, содержащее
камеру, имеющую линзу для формирования видеоизображения области сзади транспортного средства;
средство обнаружения трехмерных объектов для обнаружения трехмерного объекта сзади транспортного средства на основе изображений, захватываемых посредством камеры;
средство очистки линзы для распыления очищающей жидкости, с тем чтобы очищать линзу камеры;
средство оценки состояния линзы для оценки того, находится или нет линза в предварительно определенном состоянии, подлежащем управлению, на основе времени, когда очищающая жидкость распыляется на линзу на этапе очистки линзы, выполняемом средством очистки линзы; и
средство управления, которое, когда средство оценки состояния линзы оценивает то, что состояние линзы является состоянием, подлежащим управлению, сохраняет, в течение предварительно определенной продолжительности, результаты обнаружения или оценки от момента непосредственно перед тем, как линза оценена как находящаяся в состоянии, подлежащем управлению, посредством этого останавливая обнаружение трехмерного объекта.
2. Устройство обнаружения трехмерных объектов по п.1, отличающееся тем, что дополнительно содержит
средство преобразования изображений для выполнения преобразования точки обзора изображений, захваченных посредством камеры, в изображения вида "с высоты птичьего полета"; и
средство оценки трехмерных объектов для оценки того, является или нет трехмерный объект, обнаруженный средством обнаружения трехмерных объектов, другим транспортным средством;
причем средство обнаружения трехмерных объектов совмещает, в виде "с высоты птичьего полета", позиции изображений вида "с высоты птичьего полета" в разные моменты времени, полученных средством преобразования изображений, подсчитывает число пикселов, указывающих предварительно определенную разность в разностном изображении совмещенного изображения вида "с высоты птичьего полета" вдоль направления сплющивания трехмерного объекта, когда выполнено преобразование точки обзора изображений вида "с высоты птичьего полета", чтобы создавать частотное распределение, посредством чего формируется информация формы разностного сигнала; и обнаруживает трехмерный объект на основе информации формы разностного сигнала;
причем средство очистки линзы снабжено насосом для подачи очищающей жидкости и форсункой для распыления подаваемой очищающей жидкости на линзу, и средство очистки линзы очищает линзу камеры посредством распыления очищающей жидкости на линзу в предварительно определенное время согласно предварительно определенному этапу очистки линзы; и
когда средство оценки состояния линзы оценивает то, что состояние линзы является состоянием, подлежащим управлению, средство управления сохраняет результаты обнаружения или оценки от момента непосредственно перед тем, как состояние линзы оценено в качестве состояния, подлежащего управлению, в течение предварительно определенной продолжительности, посредством этого останавливая обнаружение трехмерного объекта или оценку трехмерного объекта в качестве другого транспортного средства.
3. Устройство обнаружения трехмерных объектов по п.1 или 2, отличающееся тем, что когда средство оценки состояния линзы оценивает то, что состояние линзы является состоянием, подлежащим управлению, и идентифицируется состояние обнаружения, в котором трехмерный объект обнаруживается средством обнаружения трехмерных объектов непосредственно перед тем, как состояние линзы оценено в качестве состояния, подлежащего управлению, средство управления сохраняет результаты обнаружения от момента непосредственно перед тем, как состояние линзы оценено в качестве состояния, подлежащего управлению, в течение предварительно определенной продолжительности.
4. Устройство обнаружения трехмерных объектов по п.1, отличающееся тем, что средство очистки линзы очищает линзу с использованием очищающей жидкости согласно предварительно определенным этапам очистки линзы, включающим в себя этап увлажнения линзы, первый этап продувки воздухом, этап очистки и второй этап продувки воздухом;
средство оценки состояния линзы оценивает то, что состояние линзы является состоянием, подлежащим управлению, в котором среднее количество очищающей жидкости прилипает к линзе, от времени, когда начинается первый этап продувки воздухом, до времени, когда заканчивается первый этап продувки воздухом; и
когда состояние линзы оценивается в качестве состояния, подлежащего управлению, в котором среднее количество очищающей жидкости прилипает к линзе, средство управления сохраняет, в течение предварительно определенной продолжительности, результаты обнаружения от момента непосредственно перед тем, как состояние линзы оценено в качестве состояния, подлежащего управлению.
5. Устройство обнаружения трехмерных объектов по п.4, отличающееся тем, что
средство оценки состояния линзы идентифицирует число раз, когда продувается воздух в ходе первого этапа продувки воздухом для оцениваемого состояния линзы; и
более высокое идентифицированное число раз, когда продувается воздух, соответствует меньшему времени, заданному средством управления, в течение которого от момента непосредственно перед тем, как состояние линзы оценено в качестве состояния, подлежащего управлению, должны сохраняться результаты обнаружения.
6. Устройство обнаружения трехмерных объектов по п.1, отличающееся тем, что
средство обнаружения трехмерных объектов обнаруживает трехмерный объект, присутствующий в области обнаружения, на основе информации формы разностного сигнала, и вычисляет относительную скорость трехмерного объекта на основе изменения во времени в форме сигнала информации формы разностного сигнала в пределах предварительно определенной продолжительности;
когда относительная скорость трехмерного объекта непрерывно находится в пределах предварительно определенного диапазона значений в течение предварительно определенной продолжительности или более, средство оценки трехмерных объектов оценивает то, что трехмерный объект является другим транспортным средством;
средство очистки линзы очищает линзу с использованием очищающей жидкости согласно предварительно определенным этапам очистки линзы, включающим в себя этап увлажнения линзы, первый этап продувки воздухом, этап очистки и второй этап продувки воздухом;
средство оценки состояния линзы оценивает то, что состояние линзы является состоянием, подлежащим управлению, в котором малое количество очищающей жидкости прилипает к линзе от момента, когда начинается процесс продувки воздухом, выполняемый в последний раз на первом этапе продувки воздухом, до момента, когда завершается упомянутый процесс, и от момента, когда начинается второй этап продувки воздухом, до момента, когда завершается второй этап продувки воздухом; и
когда оценено, что состояние линзы является состоянием, подлежащим управлению, в котором малое количество очищающей жидкости прилипает к линзе, средство управления сохраняет, в течение предварительно определенной продолжительности, относительную скорость трехмерного объекта, обнаруженного непосредственно перед тем, как состояние линзы оценено в качестве состояния, подлежащего управлению, или результаты оценки, указывающие, является или нет трехмерный объект другим транспортным средством, на основе относительной скорости.
7. Устройство обнаружения трехмерных объектов по п.1, отличающееся тем, что оно дополнительно содержит
средство преобразования изображений для выполнения преобразования точки обзора изображений, полученных посредством камеры, в изображения вида "с высоты птичьего полета"; и
средство оценки трехмерных объектов для оценки того, является или нет трехмерный объект, обнаруженный средством обнаружения трехмерных объектов, другим транспортным средством;
причем средство обнаружения трехмерных объектов обнаруживает информацию краев, указывающую то, что имеется яркостное различие между смежными областями изображения, равное или превышающее предварительно определенное пороговое значение вдоль направления сплющивания трехмерного объекта, когда преобразование точки обзора в изображения вида "с высоты птичьего полета" выполнено, в изображениях вида "с высоты птичьего полета", полученных средством преобразования изображений, и обнаруживает трехмерный объект на основе информации краев;
причем средство очистки линзы снабжено насосом для подачи очищающей жидкости и форсункой для распыления подаваемой очищающей жидкости на линзу, средство очистки линзы очищает линзу камеры посредством распыления очищающей жидкости на линзу в предварительно определенное время согласно предварительно определенному этапу очистки линзы; и
когда средство оценки состояния линзы оценивает то, что состояние линзы является состоянием, подлежащим управлению, средство управления сохраняет, в течение предварительно определенной продолжительности, результаты обнаружения или оценки от момента непосредственно перед тем, как состояние линзы оценено в качестве состояния, подлежащего управлению, посредством этого останавливая обнаружение трехмерного объекта или оценку трехмерного объекта в качестве другого транспортного средства.
8. Устройство обнаружения трехмерных объектов по п.7, отличающееся тем, что когда средство оценки состояния линзы оценивает то, что состояние линзы является состоянием, подлежащим управлению, и идентифицируется состояние обнаружения, в котором трехмерный объект обнаруживается средством обнаружения трехмерных объектов непосредственно перед тем, как состояние линзы оценено в качестве состояния, подлежащего управлению, средство управления сохраняет, в течение предварительно определенной продолжительности, результаты обнаружения от момента непосредственно перед тем, как состояние линзы оценено в качестве состояния, подлежащего управлению.
9. Устройство обнаружения трехмерных объектов по п.7 или 8, отличающееся тем, что
средство очистки линзы очищает линзу с использованием очищающей жидкости согласно предварительно определенным этапам очистки линзы, включающим в себя этап увлажнения линзы, первый этап продувки воздухом, этап очистки и второй этап продувки воздухом;
средство оценки состояния линзы оценивает то, что состояние линзы является состоянием, подлежащим управлению, в котором существует большое количество очищающей жидкости, прилипающей к линзе от момента, когда начинаются этапы очистки линзы, до момента, когда завершается этап увлажнения линзы, или от момента, когда начинается этап очистки, до момента, когда заканчивается этап очистки; и
когда состояние линзы является состоянием, подлежащим управлению, в котором большое количество очищающей жидкости прилипает к линзе, средство управления сохраняет, в течение предварительно определенной продолжительности, результаты обнаружения от момента непосредственно перед тем, как состояние линзы оценено в качестве состояния, подлежащего управлению.
10. Устройство обнаружения трехмерных объектов по п.7, отличающееся тем, что
средство обнаружения трехмерных объектов обнаруживает трехмерный объект, присутствующий в области обнаружения, на основе информации краев, и вычисляет относительную скорость трехмерного объекта на основе изменения во времени в информации краев в пределах предварительно определенной продолжительности;
средство оценки трехмерных объектов оценивает то, что трехмерный объект является другим транспортным средством, когда относительная скорость трехмерного объекта непрерывно находится в пределах предварительно определенного диапазона значений в течение предварительно определенной продолжительности или более;
средство очистки линзы очищает линзу с использованием очищающей жидкости согласно предварительно определенным этапам очистки линзы, включающим в себя этап увлажнения линзы, первый этап продувки воздухом, этап очистки и второй этап продувки воздухом;
средство оценки состояния линзы оценивает то, что состояние линзы является состоянием, подлежащим управлению, в котором малое количество очищающей жидкости прилипает к линзе от момента, когда начинается процесс продувки воздухом, выполняемый в последний раз на первом этапе продувки воздухом, до момента, когда завершается упомянутый процесс, и от момента, когда начинается второй этап продувки воздухом, до момента, когда завершается второй этап продувки воздухом; и
когда оценено, что состояние линзы является состоянием, подлежащим управлению, в котором малое количество очищающей жидкости прилипает к линзе, средство управления сохраняет, в течение предварительно определенной продолжительности, относительную скорость трехмерного объекта, обнаруженного непосредственно перед тем, как состояние линзы оценено в качестве состояния, подлежащего управлению, или результаты оценки, указывающие, является или нет трехмерный объект другим транспортным средством, на основе относительной скорости.
11. Способ обнаружения трехмерных объектов, в котором вычислительное устройство устройства обнаружения трехмерных объектов выполняет:
этап, на котором обнаруживают трехмерный объект сзади транспортного средства на основе изображений, полученных посредством камеры, которая установлена на транспортном средстве и снабжена линзой для формирования видеоизображения области сзади транспортного средства;
этап, на котором оценивают, является или нет состояние линзы предварительно определенным состоянием, подлежащим управлению, на основе времени, когда очищающая жидкость распыляется на линзу в ходе этапа очистки линзы, на котором линзу камеры очищают посредством распыления очищающей жидкости, причем этап очистки линзы выполняется с использованием устройства для очистки линзы; и
этап, на котором сохраняют, в течение предварительно определенной продолжительности, результаты обнаружения или оценки, когда оценено, что состояние линзы является предварительно определенным состоянием, подлежащим управлению, от момента непосредственно перед тем, как линза оценена как находящаяся в состоянии, подлежащем управлению, посредством этого останавливая обнаружение трехмерного объекта.
| JP 2011240917 A, 01.12.2011 | |||
| JP 2012132988 A, 12.07.2012 | |||
| JP 2011245989 A, 08.12.2011 | |||
| СПОСОБ ОЧИСТКИ ВХОДНОГО ЭЛЕМЕНТА ВИДЕОКАМЕРЫ, УСТАНОВЛЕННОЙ НА ТРАНСПОРТНОМ СРЕДСТВЕ | 2009 |
|
RU2424925C1 |

