ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Изобретение относится к устройству управления транспортного средства и способу управления им.
УРОВЕНЬ ТЕХНИКИ
[0002] JP 2009-173235A раскрывает традиционную технологию корректирования движущей силы в соответствии с атмосферным давлением и управления двигателем на основе скорректированной движущей силы.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0003] Однако с помощью вышеупомянутого изобретения целевой крутящий момент двигателя и целевая скорость вращения двигателя задаются на основе скорректированной движущей силы. Поэтому при той же величине нажатия педали акселератора водителем, целевая скорость вращения изменяется между тем, когда атмосферное давление высокое, и тем, когда атмосферное давление низкое. Это может, возможно, заставлять водителя ощущать чувство дискомфорта.
[0004] Настоящее изобретение было осуществлено, чтобы решить вышеупомянутую проблему. Целью настоящего изобретения является ослабление чувства дискомфорта, испытываемого водителем, посредством пресечения изменения в целевой скорости вращения двигателя, когда величина нажатия педали акселератора водителем является практически постоянной при различных атмосферных давлениях.
[0005] Устройство управления транспортного средства согласно аспекту настоящего изобретения включает в себя: первый блок вычисления целевой движущей силы, выполненный с возможностью вычислять первую целевую движущую силу на основе степени открытия педали акселератора; блок вычисления целевого передаточного отношения, выполненный с возможностью вычислять целевое передаточное отношение бесступенчатой трансмиссии на основе первой целевой движущей силы; блок вычисления целевого крутящего момента, выполненный с возможностью вычислять целевой крутящий момент источника приведения в движение на основе первой целевой движущей силы; блок обнаружения плотности воздуха, выполненный с возможностью обнаруживать плотность воздуха; и первый блок корректирования, выполненный с возможностью корректировать только целевой крутящий момент из целевого передаточного отношения и целевого крутящего момента в соответствии с плотностью воздуха.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0006] Фиг. 1 - это схематичный чертеж конфигурации транспортного средства согласно первому варианту осуществления.
Фиг. 2 показывает блоки управления для задания целевого передаточного отношения и целевого крутящего момента двигателя в первом варианте осуществления.
Фиг. 3 - это временная диаграмма для описания первой целевой движущей силы и второй целевой движущей силы в случае первого варианта осуществления.
Фиг. 4 - это схематичный чертеж конфигурации транспортного средства согласно второму варианту осуществления.
Фиг. 5 показывает блоки управления для задания целевого передаточного отношения и целевого крутящего момента двигателя во втором варианте осуществления.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0007] Последующее описывает варианты осуществления настоящего изобретения со ссылкой на приложенные чертежи.
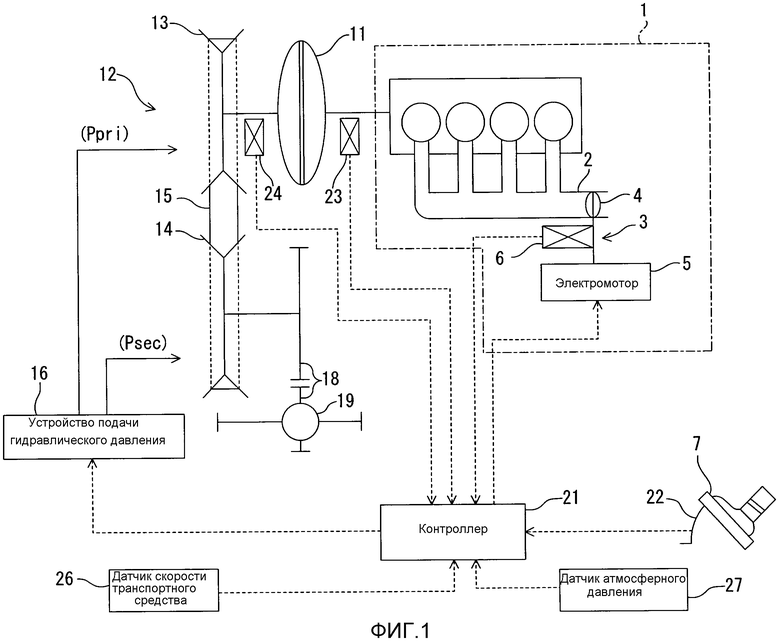
[0008] Конфигурация согласно первому варианту осуществления настоящего изобретения будет сейчас описана со ссылкой на фиг. 1.
[0009] Выходная мощность от двигателя 1 транспортного средства вводится в бесступенчатую трансмиссию 12 через преобразователь 11 крутящего момента. Бесступенчатая трансмиссия 12 включает в себя первичный шкив 13, вторичный шкив 14 и V-образный ремень 15, обернутый вокруг шкивов 13 и 14. Первичный шкив 13 изменяет радиус контакта с V-образным ремнем 15, изменяя ширину канавки в соответствии с гидравлическим давлением Ppri. Вторичный шкив 14 изменяет радиус контакта с V-образным ремнем 15, изменяя ширину канавки в соответствии с гидравлическим давлением Psec. В результате, бесступенчатая трансмиссия 12 непрерывно изменяет соотношение между входной скоростью вращения и выходной скоростью вращения, т.е. передаточное отношение, в соответствии с управлением гидравлическим давлением Ppri и гидравлическим давлением Psec. Гидравлическое давление Ppri и гидравлическое давление Psec формируются посредством устройства 16 подачи гидравлического давления.
[0010] Вторичный шкив 14 соединяется с ведущими колесами через конечную передачу 18 и дифференциал 19.
[0011] Двигатель 1 включает в себя устройство 3 дроссельной заслонки, которое регулирует объем всасываемого воздуха. Устройство 3 дроссельной заслонки включает в себя дроссельную заслонку 4, предусмотренную во впускном канале 2 двигателя 1, и электромотор 5, который изменяет степень открытия дроссельной заслонки 4 в соответствии с входным сигналом.
[0012] Устройство 16 подачи гидравлического давления и устройство 3 дроссельной заслонки работают в соответствии с командными сигналами, выводимыми из контроллера 21.
[0013] Контроллер 21 состоит из микрокомпьютера, снабженного центральным процессором (CPU), постоянным запоминающим устройством (ROM), оперативным запоминающим устройством (RAM) и интерфейсом ввода/вывода (I/O). Контроллер 21 может состоять из множества микрокомпьютеров.
[0014] Контроллер 21 принимает, в качестве входных данных, сигналы обнаружения от датчика 6 открытия дроссельной заслонки, датчика 22 степени открытия педали акселератора, датчика 23 скорости вращения двигателя, датчика 24 скорости вращения первичного шкива, датчика 26 скорости транспортного средства и датчика 27 атмосферного давления. Датчик 6 степени открытия дроссельной заслонки обнаруживает степень открытия дросселя для дроссельной заслонки 4. Датчик 22 степени открытия педали акселератора обнаруживает открытие педали акселератора для педали 7 акселератора, предусмотренной в транспортном средстве. Датчик 23 скорости вращения двигателя обнаруживает скорость вращения двигателя 1. Датчик 24 скорости вращения первичного шкива обнаруживает скорость вращения первичного шкива 13. Датчик 26 скорости транспортного средства обнаруживает скорость движения транспортного средства. Датчик 27 атмосферного давления обнаруживает атмосферное давление.
[0015] Контроллер 21 управляет движущей силой транспортного средства, управляя степенью открытия дроссельной заслонки 4 и управляя переключением бесступенчатой трансмиссии 12 через устройство 16 подачи гидравлического давления в соответствии с этими сигналами обнаружения.
[0016] Со ссылкой на блок-схему управления на фиг. 2 теперь предоставляется описание блока 100 настройки согласно настоящему варианту осуществления, который задает целевое передаточное отношение и целевой крутящий момент двигателя. Последующее управление выполняется посредством контроллера 21.
[0017] Блок 100 настройки состоит из блока 101 вычисления целевой движущей силы, блока 102 вычисления целевой выходной мощности, блока 103 вычисления целевой скорости вращения двигателя, блока 104 вычисления целевой выходной скорости вращения, блока 105 вычисления целевого передаточного отношения, блока 106 корректирования атмосферного давления и блока 107 вычисления целевого крутящего момента двигателя.
[0018] Блок 101 вычисления целевой движущей силы вычисляет первую целевую движущую силу из карты, которая была задана заранее на основе скорости транспортного средства и степени открытия педали акселератора. Скорость транспортного средства обнаруживается на основе сигнала обнаружения от датчика 26 скорости транспортного средства. Степень открытия педали акселератора обнаруживается на основе сигнала обнаружения от датчика 22 степени открытия педали акселератора.
[0019] Блок 102 вычисления целевой выходной мощности вычисляет целевую выходную мощность, умножая первую целевую движущую силу на скорость транспортного средства.
[0020] Блок 103 вычисления целевой скорости вращения двигателя вычисляет целевую скорость вращения двигателя из карты, которая была задана заранее на основе целевой выходной мощности.
[0021] Блок 104 вычисления целевой выходной скорости вращения вычисляет скорость вращения вторичного шкива 14 бесступенчатой трансмиссии 12 на основе скорости транспортного средства.
[0022] Блок 105 вычисления целевого передаточного отношения вычисляет целевое передаточное отношение посредством деления целевой скорости вращения двигателя на скорость вращения вторичного шкива 14. На целевую скорость вращения двигателя не влияет атмосферное давление, поскольку она вычисляется на основе первой целевой движущей силы. Следовательно, целевое передаточное отношение не изменяется даже при различных атмосферных давлениях.
[0023] Блок 106 корректирования атмосферного давления вычисляет вторую целевую движущую силу из карты, которая была задана заранее на основе атмосферного давления и первой целевой движущей силы. Атмосферное давление обнаруживается на основе сигнала обнаружения от датчика 27 атмосферного давления. Блок 106 корректирования атмосферного давления вычисляет вторую целевую движущую силу, корректируя первую целевую движущую силу в соответствии с атмосферным давлением. Чем ниже атмосферное давление, тем меньше вторая целевая движущая сила.
[0024] Блок 107 вычисления целевого крутящего момента двигателя вычисляет целевой крутящий момент двигателя посредством деления произведения второй целевой движущей силы и радиуса ведущих колес на целевое передаточное отношение и коэффициент конечной передачи. Например, в случае, когда транспортное средство движется по гористой местности при низком атмосферном давлении с низкой плотностью воздуха, целевой крутящий момент двигателя является небольшим по сравнению со случаем, когда транспортное средство движется по низменной местности при нормальном атмосферном давлении.
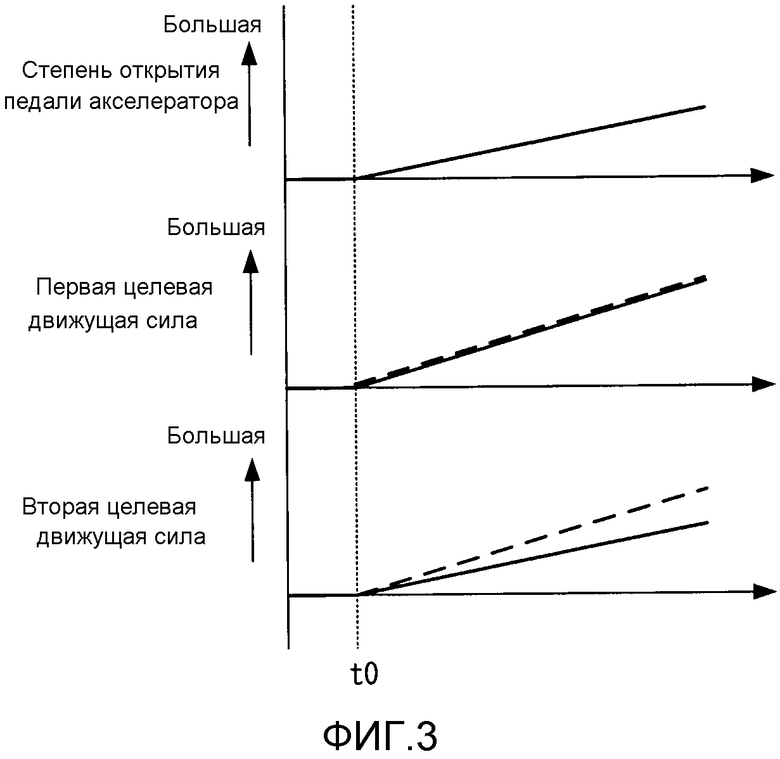
[0025] Со ссылкой на временную диаграмму на фиг. 3, теперь предоставляется описание первой целевой движущей силы и второй целевой движущей силы в случае настоящего варианта осуществления. Фиг. 3 показывает изменения степени открытия педали акселератора, первой целевой движущей силы и второй целевой движущей силы в случае, когда транспортное средство начало двигаться по гористой местности, следом за состоянием остановки. На фиг. 3 прерывистые линии указывают движущие силы, относящиеся к случаю, когда транспортное средство движется по низменной местности с той же степенью открытия педали акселератора.
[0026] В момент времени t0 педаль 7 акселератора нажимается, и транспортное средство начинает двигаться. Затем, первая целевая движущая сила и вторая целевая движущая сила постепенно увеличиваются. Когда вторая целевая движущая сила корректируется на основе атмосферного давления, вторая целевая движущая сила становится небольшой по сравнению с целевой движущей силой, характерной для случая, когда транспортное средство движется по низменной местности. Соответственно, целевой крутящий момент двигателя, который вычисляется на основе второй целевой движущей силы, становится небольшим по сравнению с целевым крутящим моментом двигателя, свойственным случаю, когда транспортное средство движется по низменной местности. С другой стороны, поскольку первая целевая движущая сила не корректируется на основе атмосферного давления, первая целевая движущая сила имеет то же значение, что и целевая движущая сила, характерная для случая, когда транспортное средство движется по низменной местности. Соответственно, целевое передаточное отношение, которое вычисляется на основе первой целевой движущей силы, имеет то же значение, что и целевое передаточное отношение, характерное для случая, когда транспортное средство движется по низменной местности.
[0027] Сейчас будут описаны результаты первого варианта осуществления настоящего изобретения.
[0028] В первом варианте осуществления первая целевая движущая сила вычисляется на основе степени открытия педали акселератора, а целевое передаточное отношение вычисляется на основе первой целевой движущей силы. Между тем, целевой крутящий момент двигателя вычисляется на основе атмосферного давления и первой целевой движущей силы. Таким образом, из целевого передаточного отношения и целевого крутящего момента двигателя только целевой крутящий момент двигателя вычисляется, принимая во внимание влияние атмосферного давления. Соответственно, одинаковое целевое передаточное отношение вырабатывается даже при различных атмосферных давлениях, например, движется ли транспортное средство по низменной или по гористой местности, с одинаковой степенью открытия педали акселератора.
[0029] Если скорость вращения двигателя изменяется под влиянием атмосферного давления во время движения с одинаковой степенью открытия педали акселератора, водитель может ощущать чувство дискомфорта.
[0030] В настоящем варианте осуществления из целевого передаточного отношения и целевого крутящего момента двигателя только целевой крутящий момент двигателя вычисляется, принимая во внимание влияние атмосферного давления. Это делает возможным предотвращение изменения целевого передаточного отношения и скорости вращения двигателя в соответствии с атмосферным давлением. Соответственно, может не допускаться возникновения у водителя ощущения чувства дискомфорта.
[0031] Снижение атмосферного давления ведет к снижению крутящего момента, который может быть выведен от двигателя 1. Поэтому, например, в случае, когда водитель постепенно нажимает на педаль 7 акселератора, существует вероятность того, что крутящий момент двигателя достигает максимума посредине пути под влиянием атмосферного давления и последующее нажатие педали 7 акселератора дает нулевое (небольшое) увеличение крутящего момента. В настоящем варианте осуществления целевой крутящий момент двигателя вычисляется на основе атмосферного давления. Поэтому при низком атмосферном давлении целевой крутящий момент двигателя уменьшается и, следовательно, достижение максимума крутящего момента двигателя пресекается. Это делает возможным пресечение возникновения ситуации, в которой нажатие педали 7 акселератора дает нулевое (небольшое) увеличение крутящего момента.
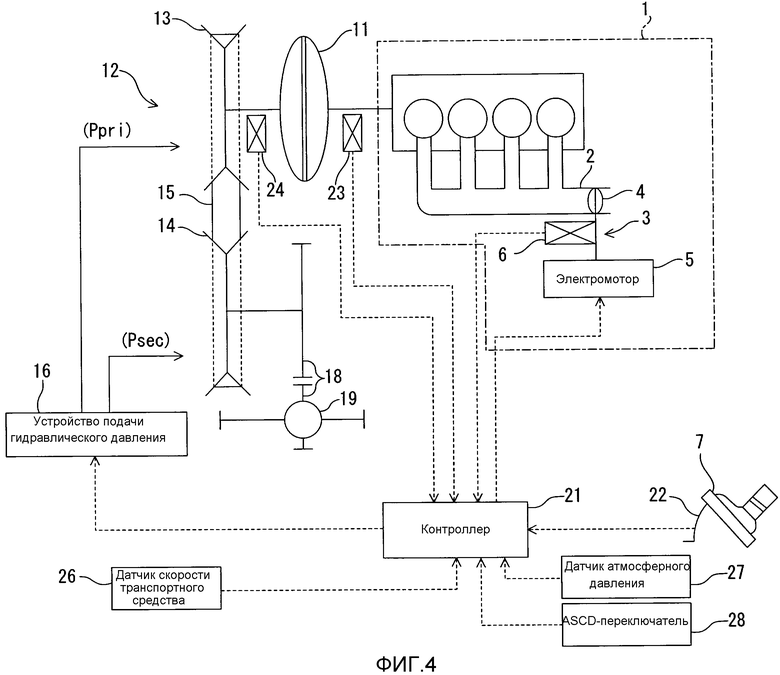
[0032] Теперь предоставляется описание второго варианта осуществления настоящего изобретения.
[0033] Фрагменты второго варианта осуществления, которые отличаются от фиг. 1, будут описаны. Как показано на фиг. 4, транспортное средство согласно второму варианту осуществления включает в себя переключатель 28 устройства автоматического управления скоростью (ASCD) в дополнение к составным компонентам, показанным на фиг. 1. Контроллер 21 выполняет автоматическое поддержание скорости в соответствии с воздействием на ASCD-переключатель 28.
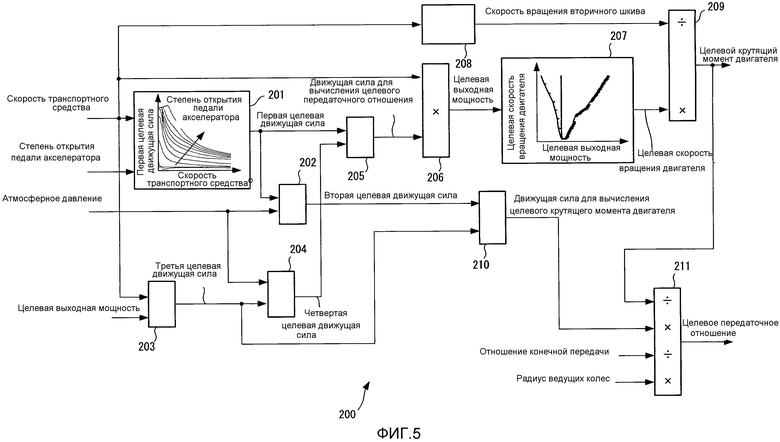
[0034] Со ссылкой на блок-схему управления на фиг. 5 теперь предоставляется описание блока 200 настройки согласно настоящему варианту осуществления, который задает целевое передаточное отношение и целевой крутящий момент двигателя. Последующее управление выполняется посредством контроллера 21.
[0035] Блок 200 настройки состоит из блока 201 вычисления целевой движущей силы, блока 202 корректирования атмосферного давления, блока 203 вычисления целевой движущей силы для автоматического поддержания скорости, блока 204 обратного корректирования атмосферного давления, первого блока 205 выбора целевой движущей силы, блока 206 вычисления целевой выходной мощности, блока 207 вычисления целевой скорости вращения двигателя, блока 208 вычисления целевой выходной скорости вращения, блока 209 вычисления целевого передаточного отношения, второго блока 210 выбора целевой движущей силы и блока 211 вычисления целевого крутящего момента двигателя.
[0036] Блок 201 вычисления целевой движущей силы вычисляет первую целевую движущую силу из карты, которая была задана заранее на основе скорости транспортного средства и степени открытия педали акселератора.
[0037] Блок 202 корректирования атмосферного давления вычисляет вторую целевую движущую силу из карты, которая была задана заранее на основе атмосферного давления и первой целевой движущей силы.
[0038] Блок 203 вычисления целевой движущей силы для автоматического поддержания скорости вычисляет третью целевую движущую силу, которая является целевой движущей силой во время автоматического поддержания скорости. Блок 203 вычисления целевой движущей силы для автоматического поддержания скорости вычисляет третью целевую движущую силу на основе целевой скорости транспортного средства во время автоматического поддержания скорости и фактической скорости транспортного средства. Блок 203 вычисления целевой движущей силы для автоматического поддержания скорости вычисляет сопротивление движению на основе целевой скорости транспортного средства, использует это сопротивление движению в качестве базовой целевой движущей силы, вычисляет движущую силу, которая дополнительно требуется, из отклонения между фактической скоростью транспортного средства и целевой скоростью транспортного средства и вычисляет третью целевую движущую силу посредством сложения целевой движущей силы и движущей силы, которая дополнительно требуется. Третья целевая движущая сила отражает влияние атмосферного давления окружающей среды, в которой транспортное средство в настоящий момент движется. Например, в случае, когда транспортное средство движется по гористой местности при низком атмосферном давлении, третья целевая движущая сила является небольшой по сравнению со случаем, когда транспортное средство движется по низменной местности при нормальном атмосферном давлении.
[0039] Блок 204 обратного корректирования атмосферного давления вычисляет четвертую целевую движущую силу, корректируя третью целевую движущую силу на основе атмосферного давления. На значение четвертой целевой движущей силы не влияет атмосферное давление окружающей среды, в которой транспортное средство в настоящий момент движется. Например, в случае, когда транспортное средство движется по гористой местности в режиме автоматического поддержания скорости, четвертая целевая движущая сила эквивалентна движущей силе, характерной для случая, когда транспортное средство движется по низменной местности в режиме автоматического поддержания скорости. Более конкретно, четвертая целевая движущая сила эквивалентна движущей силе при давлении в 1 атмосферу.
[0040] Первый блок 205 выбора целевой движущей силы выбирает движущую силу для вычисления целевого передаточного отношения на основе сигнала от ASCD-переключателя 28. Первый блок 205 выбора целевой движущей силы выбирает четвертую целевую движущую силу в качестве движущей силы для вычисления целевого передаточного отношения, когда ASCD-переключатель 28 включен, и выбирает первую целевую движущую силу в качестве движущей силы для вычисления целевого передаточного отношения, когда ASCD-переключатель 28 выключен.
[0041] Блок 206 вычисления целевой выходной мощности вычисляет целевую выходную мощность, умножая движущую силу для вычисления целевого передаточного отношения на скорость транспортного средства.
[0042] Блок 207 вычисления целевой скорости вращения двигателя вычисляет целевую скорость вращения двигателя из карты, которая была задана заранее на основе целевой выходной мощности.
[0043] Блок 208 вычисления целевой выходной скорости вращения вычисляет скорость вращения вторичного шкива 14 бесступенчатой трансмиссии 12 на основе скорости транспортного средства.
[0044] Блок 209 вычисления целевого передаточного отношения вычисляет целевое передаточное отношение посредством деления целевой скорости вращения двигателя на скорость вращения вторичного шкива 14. Когда ASCD-переключатель 28 включен, целевое передаточное отношение вычисляется на основе четвертой целевой движущей силы, которая была скорректирована так, чтобы на нее не влияло атмосферное давление. С другой стороны, когда ASCD-переключатель 28 выключен, целевое передаточное отношение вычисляется на основе первой целевой движущей силы, на которую не влияет атмосферное давление. Поэтому даже при различных атмосферных давлениях целевое передаточное отношение не изменяется, пока другие условия движения остаются теми же.
[0045] Второй блок 210 выбора целевой движущей силы вычисляет движущую силу для вычисления целевого крутящего момента двигателя на основе сигнала от ASCD-переключателя 28. Второй блок 210 выбора целевой движущей силы выбирает третью целевую движущую силу в качестве движущей силы для вычисления целевого крутящего момента двигателя, когда ASCD-переключатель 28 включен, и выбирает вторую целевую движущую силу в качестве движущей силы для вычисления целевого крутящего момента двигателя, когда ASCD-переключатель 28 выключен.
[0046] Блок 211 вычисления целевого крутящего момента двигателя задает целевой крутящий момент двигателя посредством деления произведения движущей силы для вычисления целевого крутящего момента двигателя и радиуса ведущих колес на целевое передаточное отношение и коэффициент конечной передачи.
[0047] Результаты второго варианта осуществления настоящего изобретения будут сейчас описаны.
[0048] При движении в режиме автоматического поддержания скорости четвертая целевая движущая сила вычисляется посредством корректирования третьей целевой движущей силы, которая является целевой движущей силой во время автоматического поддержания скорости, на основе атмосферного давления так, чтобы на нее не влияло атмосферное давление. Затем, целевое передаточное отношение вычисляется на основе четвертой целевой движущей силы. Это делает возможным пресечение изменения в целевом передаточном отношении под воздействием атмосферного давления, когда состояние ASCD-переключателя 28 переключается с включенного на выключенное. Например, во время максимального открытия педали акселератора во время автоматического поддержания скорости, если состояние ASCD-переключателя 28 переключается с включенного на выключенное в результате нажатия водителем педали 7 акселератора с тем, чтобы максимизировать открытие педали акселератора, движущая сила для вычисления целевого передаточного отношения не изменяется и, следовательно, целевое передаточное отношение не изменяется. Соответственно, например, даже в случае, когда транспортное средство движется по гористой местности при низком атмосферном давлении, возможно предотвращать изменение целевого передаточного отношения под воздействием атмосферного давления, когда состояние ASCD-переключателя 28 переключается с включенного на выключенное, и предотвращать возникновение вызванного переключением толчка.
[0049] Здесь завершается описание вариантов осуществления настоящего изобретения. Следует отметить, что вышеописанные варианты осуществления просто иллюстрируют часть примеров применения настоящего изобретения и не предназначены, чтобы ограничивать технические рамки настоящего изобретения конкретными конфигурациями согласно вышеописанным вариантам осуществления.
[0050] В вышеописанных вариантах осуществления, например первом варианте осуществления, целевой крутящий момент двигателя вычисляется на основе атмосферного давления. Однако в этом отношении ограничение не накладывается. Целевой крутящий момент двигателя может быть вычислен на основе факторов, которые влияют на плотность воздуха, таких как температура. Во втором варианте осуществления также четвертая целевая движущая сила может быть вычислена на основе факторов, которые оказывают влияние на плотность воздуха.
[0051] В первом варианте осуществления, для того чтобы корректировать целевой крутящий момент двигателя на основе атмосферного давления, блок 106 корректирования атмосферного давления вычисляет вторую целевую движущую силу и целевой крутящий момент двигателя вычисляется на основе второй целевой движущей силы. Однако ограничение не накладывается в этом отношении, пока целевой крутящий момент двигателя может быть скорректирован в соответствии с атмосферным давлением. Например, целевой крутящий момент двигателя может быть вычислен на основе первой целевой движущей силы и значение вычисленного целевого крутящего момента двигателя может быть скорректировано в соответствии с атмосферным давлением. То же происходит для второго варианта осуществления.
[0052] Кроме того, во втором варианте осуществления, во время движения в режиме автоматического поддержания скорости, целевое передаточное отношение корректируется так, чтобы на него не влияло атмосферное давление. В частности, блок 204 обратного корректирования атмосферного давления вычисляет четвертую целевую движущую силу и целевое передаточное отношение вычисляется на основе четвертой целевой движущей силы. Однако ограничение не подразумевается в этом отношении, пока целевое передаточное отношение может быть скорректировано так, чтобы на него не влияло атмосферное давление во время движения в режиме автоматического поддержания скорости. Например, целевое передаточное отношение может быть вычислено на основе третьей целевой движущей силы и значение вычисленного целевого передаточного отношения может быть скорректировано так, чтобы на него не влияло атмосферное давление.
[0053] По настоящей заявке испрашивается приоритет по японской патентной заявке № 2012-258689, зарегистрированной в патентном ведомстве Японии 27 ноября 2012 года, раскрытие которой полностью включено в данный документ путем ссылки.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИБРИДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2010 |
|
RU2513087C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖУЩЕЙ СИЛОЙ ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2575327C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМОТОРОМ ЭЛЕКТРОТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОМОТОРОМ ЭЛЕКТРОТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2720227C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОМОТОРОМ ЭЛЕКТРИЧЕСКОГО ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2723661C1 |
| СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2505432C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ УПРАВЛЕНИЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2657480C1 |
| СПОСОБ УПРАВЛЕНИЯ ТОРМОЗНОЙ/ДВИЖУЩЕЙ СИЛОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ТОРМОЗНОЙ/ДВИЖУЩЕЙ СИЛОЙ | 2015 |
|
RU2699204C1 |
| СПОСОБ УПРАВЛЕНИЯ ТОРМОЗНОЙ/ДВИЖУЩЕЙ СИЛОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ТОРМОЗНОЙ/ДВИЖУЩЕЙ СИЛОЙ | 2015 |
|
RU2693424C1 |
| СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2503559C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2750759C1 |
Изобретение относится к управлению транспортным средством. Устройство управления транспортного средства содержит средство вычисления целевой движущей силы на основе степени открытия педали акселератора; средство вычисления целевого передаточного отношения на основе первой целевой движущей силы; средство вычисления целевого крутящего момента на основе первой целевой движущей силы и средство обнаружения плотности воздуха. Средство корректирования корректирует только целевой крутящий момент из целевого передаточного отношения и целевого крутящего момента в соответствии с плотностью воздуха. Изобретение также относится к способу управления устройством управления транспортного средства, согласно вышеуказанному устройству. Повышается комфорт управления транспортным средством. 2 н. и 3 з.п. ф-лы, 5 ил.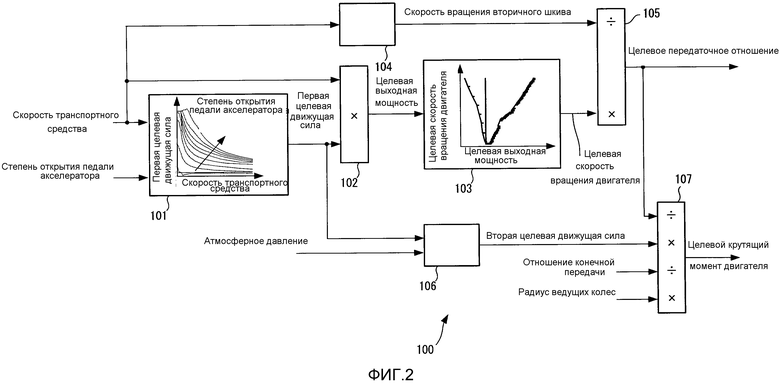
1. Устройство управления транспортного средства, содержащее:
первое средство вычисления целевой движущей силы, выполненное с возможностью вычислять первую целевую движущую силу на основе степени открытия педали акселератора;
средство вычисления целевого передаточного отношения, выполненное с возможностью вычислять целевое передаточное отношение бесступенчатой трансмиссии на основе первой целевой движущей силы;
средство вычисления целевого крутящего момента, выполненное с возможностью вычислять целевой крутящий момент источника приведения в движение на основе первой целевой движущей силы;
средство обнаружения плотности воздуха, выполненное с возможностью обнаруживать плотность воздуха; и
первое средство корректирования, выполненное с возможностью корректировать только целевой крутящий момент из целевого передаточного отношения и целевого крутящего момента в соответствии с плотностью воздуха.
2. Устройство управления транспортного средства по п. 1, в котором
первое средство корректирования выполнено с возможностью вычислять вторую целевую движущую силу посредством корректирования первой целевой движущей силы на основе плотности воздуха, и
средство вычисления целевого крутящего момента выполнено с возможностью вычислять целевой крутящий момент на основе второй целевой движущей силы.
3. Устройство управления транспортного средства по п. 1 или 2, содержащее:
второе средство вычисления целевой движущей силы, выполненное с возможностью вычислять третью целевую движущую силу, которая не зависит от степени открытия педали акселератора; и
второе средство корректирования, выполненное с возможностью, когда транспортное средство вынуждено двигаться на основе третьей целевой движущей силы, корректировать только целевое передаточное отношение, из целевого передаточного отношения и целевого крутящего момента, в соответствии с плотностью воздуха окружающей среды, в которой транспортное средство движется.
4. Устройство управления транспортного средства по п. 3, в котором
второе средство корректирования выполнено с возможностью вычислять четвертую целевую движущую силу посредством корректирования третьей целевой движущей силы на основе плотности воздуха, обнаруженной средством обнаружения плотности воздуха, причем четвертая целевая движущая сила не находится под влиянием плотности воздуха окружающей среды, в которой транспортное средство движется, и
когда транспортное средство вынуждено двигаться на основе третьей целевой движущей силы, средство вычисления целевого передаточного отношения выполнено с возможностью вычислять целевое передаточное отношение на основе четвертой целевой движущей силы.
5. Способ управления устройством управления транспортного средства, причем упомянутый способ содержит этапы, на которых:
вычисляют первую целевую движущую силу на основе степени открытия педали акселератора;
вычисляют целевое передаточное отношение бесступенчатой трансмиссии на основе первой целевой движущей силы;
вычисляют целевой крутящий момент источника приведения в движение на основе первой целевой движущей силы;
обнаруживают плотность воздуха; и
корректируют только целевой крутящий момент из целевого передаточного отношения и целевого крутящего момента в соответствии с плотностью воздуха.
| JP 2001138776 A, 22.05.2001; | |||
| JP H09287507 A, 04.11.1997; | |||
| JP H08136369 A, 31.05.1996; | |||
| JP 2002256959 A, 11.09.2002. |

