Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству, которое управляет положительной или отрицательной движущей силой транспортного средства, и, в частности, к устройству, которое управляет движущей силой во время поворота.
Уровень техники
Основным устройством для изменения скорости или движущей силы транспортного средства является источник приведения в движение, такой как двигатель, который является двигателем внутреннего сгорания и мотором (электродвигателем), которые управляются посредством механизма управления ускорением или замедлением, такого как педаль акселератора. Движущая сила может изменяться с помощью ручной или автоматической трансмиссии, и скорость транспортного средства может изменяться соответствующим образом. Тормозное устройство не может увеличивать движущую силу, но может уменьшать движущую силу, чтобы уменьшать скорость транспортного средства. С другой стороны, движущая сила действует так, чтобы вынуждать транспортное средство двигаться и увеличивать или уменьшать скорость транспортного средства, а также имеет большое влияние на характеристику поворачиваемости. Например, когда движущая сила увеличивается, характеристики управляемости изменяются, что ведет к избыточной поворачиваемости или к недостаточной поворачиваемости в зависимости от конструкции транспортного средства. Соответственно, для того, чтобы стабилизировать поведение транспортного средства или улучшать стабильность движения, предпочтительно, чтобы устройства, которые могут изменять скорость транспортного средства или движущую силу, управлялись совместно без независимого управления.
Следовательно, например, публикация японской патентной заявки №2007-296959 (JP 2007-296959 A) описывает устройство, сконфигурированное, чтобы управлять тормозным усилием тормозного устройства и тормозным усилием силовой установки совместно. В частности, в устройстве, описанном в JP 2007-296959, целевое замедление вычисляется на основе величины давления или силы нажатия на педаль тормоза, и тормозное устройство управляется на основе целевого замедления. Поскольку тормозное усилие формируется посредством управления тормозным устройством, и, таким образом, скорость транспортного средства уменьшается, передаточное отношение трансмиссии управляется так, что замедление, определенное на основе скорости транспортного средства, достигает целевого замедления. То есть увеличивается передаточное отношение трансмиссии передач.
Публикация японской патентной заявки №2006-97862 (JP 2006-97862 A) описывает устройство, сконфигурированное так, чтобы формировать замедление посредством управления коробкой передач и тормозным устройством совместно. В частности, устройство, описанное в JP 2006-97862 A, сконфигурировано, чтобы увеличивать коэффициент замедления, сформированного посредством трансмиссии, когда склонность к предпочтительной манере вождения является так называемой склонностью к спортивному вождению. Пример устройства для определения степени склонности к спортивному вождению или склонности водителя к предпочтительной манере вождения описан в международной публикации PCT №2011/021634. Устройство, описанное в международной публикации PCT №2011/021634, сконфигурировано так, чтобы определять склонность к предпочтительной манере вождения на основе ускорения (объединенного ускорения), полученного посредством объединения продольного ускорения и поперечного ускорения транспортного средства. Устройство, которое управляет движущей силой на основе определенной склонности к предпочтительной манере вождения, описано в публикации японской патентной заявки №2007-297958 (JP 2007-297958 A). В устройстве, описанном в JP 2007-297958 A, когда определено, что склонность к спортивному вождению является сильной, движущая сила в закрытом состоянии акселератора во время входа в поворот дороги управляется, чтобы формировать большее замедление по сравнению с тем случаем, когда склонность к спортивному вождению является слабой.
Однако устройство, описанное в JP 2007-296959 A, может добиваться целевого замедления с помощью тормозного усилия тормозного устройства и так называемого тормозного усилия, развиваемого двигателем на основе передаточного отношения трансмиссии, но целевое замедление вычисляется на основе величины давления, приложенного к тормозному устройству, такой как величина давления или сила нажатия. Соответственно, когда величина давления, создаваемого водителем и приложенного к тормозному устройству, недостаточна во время входа транспортного средства в поворот дороги, и тормозное устройство переходит в состояние прекращения торможения во время движения в повороте, замедление становится недостаточным. Например, величина давления, приложенного к тормозному устройству, может быть недостаточной в зависимости от структуры поворота, вследствие неправильного понимания водителем скорости транспортного средства или т.д., или воздействие на тормоз может быть снято, чтобы переводить тормозное устройство в состояние прекращения торможения, когда скорость транспортного средства удовлетворительно или чрезмерно снижается во время движения в повороте в зависимости от структуры дороги или вследствие чрезмерной или недостаточной величины давления, приложенного к тормозу водителем. В этом случае, поскольку целевое замедление вычисляется на основе недостаточной величины давления, приложенного к тормозу, тормозное усилие двигателя, сформированное в зависимости от передаточного отношения трансмиссии, после того как тормоз перешел в состояние прекращения торможения, основано на недостаточном целевом замедлении, и, таким образом, замедление становится недостаточным. В результате транспортное средство может отклоняться от целевой линии поворачивания в повороте дороги, и тогда необходимо задействовать рулевое колесо или акселератор с тем, чтобы корректировать отклонение. Соответственно, существует вероятность, что транспортным средством станет трудно управлять, или характеристики управляемости ухудшатся.
С другой стороны, как описано в международной публикации PCT №2011/021634, когда склонность в манере вождения определена, и результат определения отражается в управлении движущей силой или рулевых характеристиках транспортного средства, представляется возможным выполнять управление, принимая во внимание намерение водителя, и добиваться поведения транспортного средства, предполагаемого водителем. Такая склонность к предпочтительной манере вождения может применяться для управления движущей силой во время движения в повороте, как описано в JP 2006-97862 A или JP 2007-297958 A, но конкретные технические приемы для этого случая или технические приемы, применимые для практического использования, не были удовлетворительным образом разработаны.
Сущность изобретения
Настоящее изобретение выполнено, принимая во внимание вышеупомянутые проблемы, и его задачей является создание устройства управления движущей силой, которое может заставлять транспортное средство легко двигаться по предполагаемому пути.
Для решения вышеупомянутой задачи согласно настоящему изобретению предоставляется устройство управления движущей силой транспортного средства, которое сконфигурировано так, чтобы вычислять требуемое тормозное усилие на основе величины давления, приложенного к механизму управления тормозом, который задействуется для замедления водителем, и управлять тормозным усилием силовой установки, которая включает в себя источник приведения в движение, формирующий ускоряющее усилие и тормозное усилие, и тормозным усилием механизма торможения, который формирует тормозное усилие за счет срабатывания механизма управления тормозом, совместно так, что общее тормозное усилие транспортного средства в целом становится требуемым тормозным усилием, при этом устройство управления движущей силой сконфигурировано, чтобы обнаруживать информацию ускорения, включающую в себя поперечное ускорение транспортного средства, и управлять тормозным усилием силовой установки на основе обнаруженной информации ускорения, когда механизм управления тормозом задействуется.
В изобретении силовая установка может включать в себя электромотор, и устройство управления движущей силой может быть сконфигурировано, чтобы формировать тормозное усилие силовой установки, управляя рекуперативным крутящим моментом электромотора на основе информации ускорения.
В изобретении склонность водителя к предпочтительной манере вождения может быть определена на основе информации ускорения.
В изобретении скорость вращения источника приведения в движение может увеличиваться до скорости вращения, при которой отклик на ускорение является отличным в состоянии замедления, после того как воздействие водителя на механизм управления тормозом снимается при подготовке к ускорению, после того как замедление заканчивается.
Скорость вращения, при которой отклик на ускорение является отличным, может быть скоростью вращения источника приведения в движение, когда источник приведения в движение формирует тормозное усилие в состоянии замедления, после того как воздействие водителя на механизм управления тормозом снимается, или скоростью вращения, полученной посредством корректировки скорости вращения.
Информация ускорения может включать в себя ускорение, которое может быть сформировано посредством требуемого тормозного усилия.
Когда склонность к предпочтительной манере вождения определена, степень увеличения тормозного усилия силовой установки может постепенно уменьшаться, поскольку определенная склонность к предпочтительной манере вождения выдвигает более высокие требования к быстрому поведению транспортного средства.
Соответственно, в устройстве управления движущей силой согласно изобретению, когда механизм управления тормозом задействуется, чтобы получать тормозное усилие, тормозное усилие силовой установки, включающей в себя источник приведения в движение, такой как двигатель, управляется на основе информации ускорения, включающей в себя поперечное ускорение. Соответственно, например, когда водитель задействует тормоз во время входа транспортного средства в поворот, тормозное усилие силовой установки является тормозным усилием, основанным на информации ускорения. То есть тормозное усилие силовой установки управляется независимо от величины давления, приложенного к механизму управления тормозом. Соответственно, когда величина давления, приложенного к тормозу, равна нулю (тормоз переходит в состояние прекращения торможения), но ускорение, включающее в себя поперечное ускорение, формируется, тормозное усилие силовой установки, управляемое во время операции торможения, непрерывно воздействует на транспортное средство, даже после того как тормоз перешел в состояние прекращения торможения. Поскольку тормозное усилие основано на информации ускорения, включающей в себя поперечное ускорение, тормозное усилие во время поворота, в котором формируется поперечное ускорение, может быть задано подходящим для состояния поворота, и, таким образом, возможно предоставлять транспортное средство, предполагаемый поворот которого может легко достигаться и которое может легко управляться, или которое имеет отличные характеристики управляемости.
Когда предусмотрен электромотор, имеющий функцию рекуперации, отклик на управление рекуперативным крутящим моментом электромотора является отличным. Соответственно, например, тормозное усилие может быть быстро изменено в ответ на изменение в поперечном ускорении, и, таким образом, возможно предоставлять транспортное средство, имеющее отличную характеристику поворачивания.
Поскольку информация ускорения, включающая в себя поперечное ускорение, варьируется даже при операции вождения водителя, склонность к предпочтительной манере вождения может быть определена на основе информации ускорения. В изобретении склонность к предпочтительной манере вождения, определенная таким способом, может быть отражена в других управлениях, таких как рулевое управление в транспортном средстве, а также управление движущей силой, и, таким образом, транспортное средство может двигаться, больше принимая во внимание намерение водителя.
В изобретении, увеличивая скорость вращения источника приведения в движение до скорости вращения для приготовления к последующему ускорению в состоянии замедления, после того как воздействие на тормоз прекращено, возможно улучшать отклик ускорения для ускорения, например, во время отклонения от поворота дороги в состоянии замедления.
Когда информация ускорения включает в себя ускорение (замедление) на основе требуемого тормозного усилия, значения ускорения, используемые, чтобы вычислять целевое замедление и замедляющую движущую силу, являются обычными, и, таким образом, возможно улучшать управляемость.
Задавая соотношение между склонностью к предпочтительной манере вождения и тормозным усилием силовой установки с вышеупомянутыми нелинейными характеристиками, возможно предоставлять транспортное средство, которым можно легко управлять.
Краткое описание чертежей
Фиг. 1 - блок-схема последовательности операций, иллюстрирующая пример управления, который выполняется посредством устройства управления движущей силой согласно настоящему изобретению;
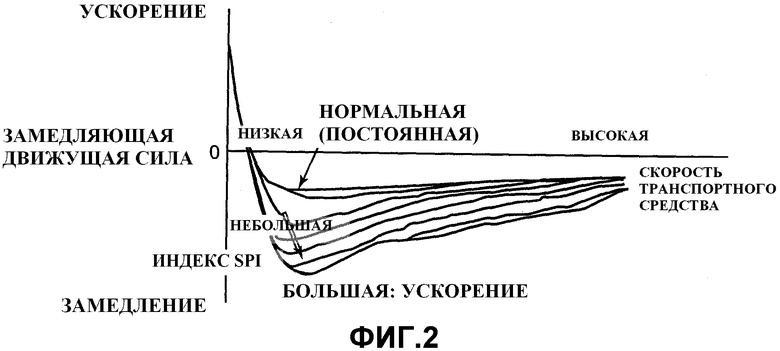
фиг. 2 - схема, иллюстрирующая пример карты, в которой замедляющая движущая сила определена в корреляции со скоростью транспортного средства и ускорением;
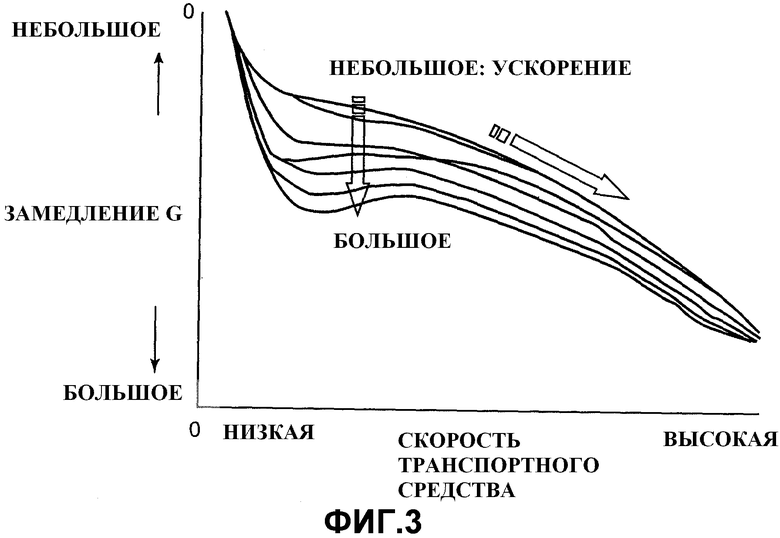
фиг. 3 - схема, иллюстрирующая карту, в которой замедляющая движущая сила заменена замедлением;
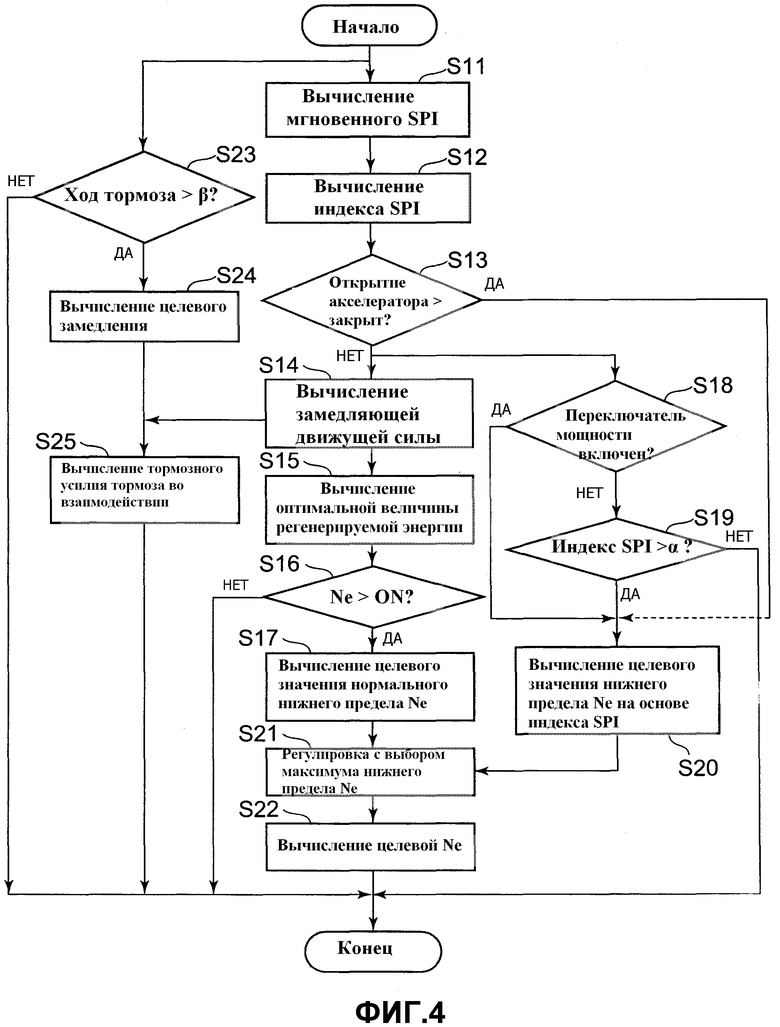
фиг. 4 - блок-схема последовательности операций, иллюстрирующая другой пример управления, который выполняется посредством устройства управления согласно настоящему изобретению;
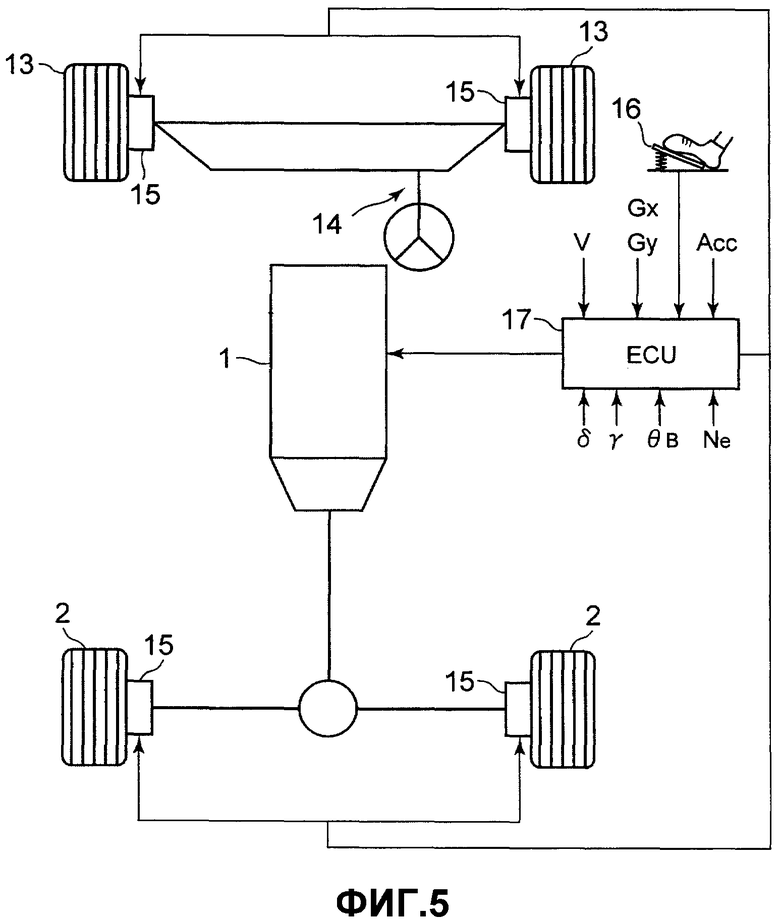
фиг. 5 - чертеж, схематично иллюстрирующий транспортное средство, к которому настоящее изобретение может быть применено;
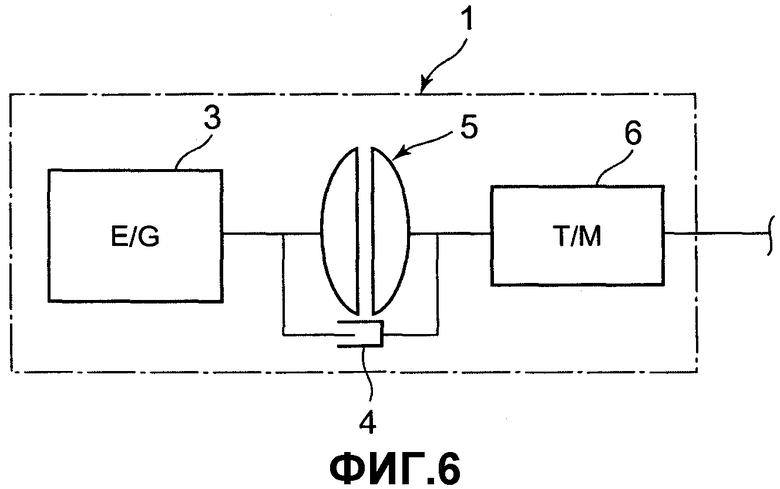
фиг. 6 - схематичный чертеж, иллюстрирующий пример силовой установки; и
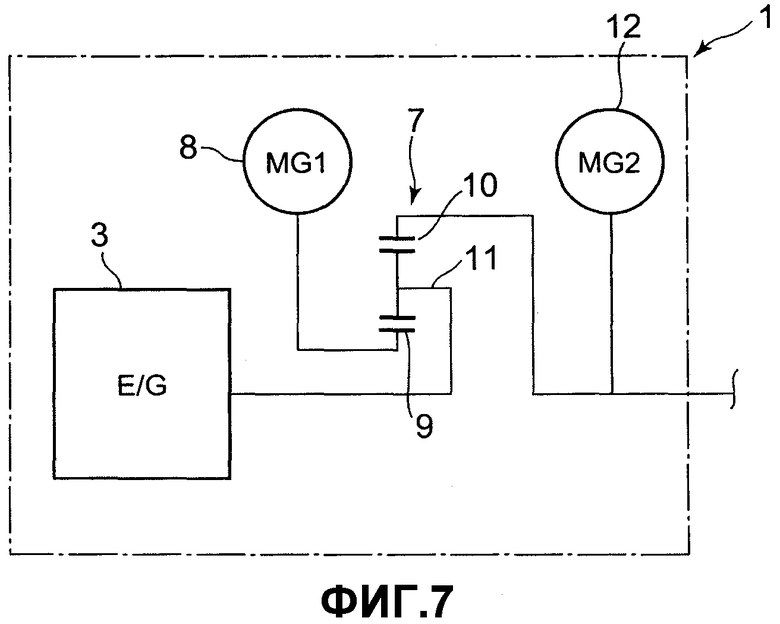
фиг. 7 - схематичный чертеж, иллюстрирующий другой пример силовой установки.
Способы осуществления изобретения
Устройство управления движущей силой согласно настоящему изобретению будет описано более подробно ниже. Сначала будет описано транспортное средство, к которому настоящее изобретение может быть применено. Фиг. 5 схематично иллюстрирует систему приведения в движение и систему управления транспортного средства, к которому настоящее изобретение может быть применено, где силовая установка 1, которая выводит, по меньшей мере, динамическую мощность для движения, соединена с ведущими колесами 2, такими как задние колеса. Силовая установка 1 может иметь ту же конфигурацию, что и силовая установка, установленная на обычном транспортном средстве в родственном уровне техники, и включает в себя двигатель внутреннего сгорания (E/G, который упоминается как двигатель) 3, такой как бензиновый двигатель, в качестве источника приведения в движение, преобразователь 5 крутящего момента, включающий в себя блокирующую муфту 4, соединенную с его выходным валом, и трансмиссию 6 (T/M), соединенную с выходной стороной преобразователя 5 крутящего момента, как проиллюстрировано на фиг. 6. Трансмиссия 6 может быть любой из ступенчатой автоматической трансмиссии и бесступенчатой автоматической трансмиссии. Соответственно, когда двигатель 3 активируется, движущая сила ускоряющего усилия соответствует крутящему моменту или передаточному числу трансмиссии в трансмиссии 6. Поскольку потеря динамической мощности, такая как сила трения или насосная потеря для сжатия и откачивания смешанного воздуха, возникает в двигателе 3, могут быть сформированы динамические потери, чтобы действовать в качестве замедляющего усилия (тормозного усилия).
Силовая установка 1 может быть гибридным устройством приведения в движение, использующим двигатель внутреннего сгорания и электромотор в качестве источников приведения в движение. Фиг. 7 схематично иллюстрирует пример так называемого гибридного устройства приведения в движение двухмоторного типа, где двигатель 3 и первая моторгенераторная установка (MG1) 8 соединены с механизмом 7 распределения мощности, включающим в себя планетарный зубчатый механизм с одинарной планетарной шестерней (сателлитом). То есть механизм 7 распределения мощности включает в себя солнечную шестерню 9, коронную шестерню 10 - шестерню с зубцами с внутренней стороны, расположенную на концентрической окружности с солнечной шестерней 9, и водило 11, поддерживающее сателлит, который расположен между солнечной шестерней 9 и коронной шестерней 10 и зацепляется с солнечной шестерней 9 и коронной шестерней 10 так, чтобы вращаться и поворачиваться в качестве вращающихся элементов, и вращающиеся элементы сконфигурированы, чтобы вращаться дифференцированно друг от друга. Двигатель 3 соединяется с водилом 11, и, таким образом, водило 11 служит в качестве входного элемента. Первая моторгенераторная установка 8 соединяется с солнечной шестерней 9, и, таким образом, солнечная шестерня 9 служит в качестве реакционного элемента. Соответственно, коронная шестерня 10 служит в качестве выходного элемента, и вторая моторгенераторная установка (MG2) 12 соединяется с коронной шестерней 10. Следовательно, в гибридном устройстве приведения в движение, имеющем конфигурацию, проиллюстрированную на фиг. 7, динамическая мощность, выводимая из двигателя 3, распределяется в сторону солнечной шестерни 9 и сторону коронной шестерни 10 посредством механизма 7 распределения мощности, и первая моторгенераторная установка 8 вращается с помощью крутящего момента, передаваемого от солнечной шестерни 9, и служит в качестве генератора мощности. То есть часть динамической мощности, выводимой из двигателя 3, преобразуется в электрическую энергию. В этом случае, управляя скоростью вращения первой моторгенераторной установки 8, скорость вращения двигателя 3 может непрерывно изменяться, и, таким образом, скорость вращения двигателя 3 может быть задана равной скорости вращения, при которой топливная экономичность является превосходной. С другой стороны, первая моторгенераторная установка 8 электрически соединена со второй моторгенераторной установкой 12 через аккумулятор (не проиллюстрирован) или без прохождения через аккумулятор, и вторая моторгенераторная установка 12 активируется с помощью электрической энергии, сгенерированной от первой моторгенераторной установки 8, чтобы объединять динамическую мощность, временно распределенную посредством механизма 7 распределения мощности, и выводить объединенную динамическую мощность к ведущим колесам 2. Во время замедления или т.п. вторая моторгенераторная установка 12 может служить в качестве генератора энергии, чтобы формировать тормозное усилие, а первая моторгенераторная установка 8 может активироваться с помощью электрической энергии, чтобы соответствующим образом управлять скоростью вращения двигателя.
В примере, проиллюстрированном на фиг. 5, задние колеса 2 являются ведущими колесами, а передние колеса 13 являются поворачивающими колесами, которые поворачиваются посредством устройства 14 рулевого управления. Задние колеса 2 и передние колеса 13 снабжены тормозными механизмами 15 соответственно, и тормозные механизмы 15 активируются, чтобы формировать тормозные усилия, соответствующие степени воздействия водителя при задействовании механизма управления тормозом, такого как педаль 16 тормоза. Хотя не проиллюстрировано на фиг. 5, предусмотрены педаль акселератора для выполнения операции ускорения/замедления, датчик открытия акселератора, датчик для измерения скорости транспортного средства, датчик для измерения угла поворота рулевого колеса, датчик ускорения для обнаружения поперечного ускорения Gy или продольного ускорения Gx, датчик для измерения скорости поворота вокруг вертикальной оси и т.п.
Предусмотрен электронный блок управления (ECU) 17 для управления движущей силой или тормозным усилием силовой установки 1 и тормозным усилием тормозного механизма 15. Электронный блок 17 управления состоит главным образом из компьютера (микропроцессора) и памяти и сконфигурирован, чтобы выполнять операцию вычисления с использованием входных данных, сохраненных данных и предварительно определенных программ и выводить предварительно определенный командный сигнал силовой установке 1, тормозным механизмам 15 и т.п. В качестве примеров данных, введенных в электронный блок 17 управления, степень срабатывания θB тормоза, такая как усилие нажатия или угол нажатия педали 16 тормоза, степень открытия Acc акселератора, угол 5 поворота рулевого колеса, скорость V транспортного средства, продольное ускорение Gx, поперечное ускорение Gy, скорость y поворота вокруг вертикальной оси и т.п. вводятся из различных датчиков в электронный блок 17 управления. Электронный блок 17 управления может быть сконфигурирован, чтобы совместно управлять силовой установкой 1 и тормозными механизмами 15, или может быть сконфигурирован, чтобы всесторонне управлять микрокомпьютером для силовой установки 1 или микрокомпьютером для тормозных механизмов 15.
Устройство управления движущей силой согласно настоящему изобретению сконфигурировано, чтобы управлять движущей силой во время торможения или движущей силой во время следующего ускорения после времени торможения, и, в частности, сконфигурировано, чтобы выполнять управляющую процедуру, проиллюстрированную на фиг. 1. Процедура, проиллюстрированная в блок-схеме на фиг. 1, циклически выполняется в состоянии, когда транспортное средство движется, или в состоянии, когда замок зажигания транспортного средства включен, и сначала получается информация ускорения (этап S1). Информация ускорения - это информация, включающая в себя, по меньшей мере, поперечное ускорение Gy и, в частности, включающая в себя поперечное ускорение Gy и продольное ускорение Gx, измеренное посредством датчика, или включающая в себя расчетные значения поперечного ускорения Gy и продольного ускорения Gx, вычисленные из скорости транспортного средства, степени открытия Acc акселератора, угла 8 поворота рулевого колеса и т.п.
Затем определяется, находится ли тормоз в активированном состоянии (этап S2). Это определение может быть выполнено на основе сигнала от переключателя тормоза, который включается нажатием на педаль 16 тормоза, и когда тормоз не задействован, и, таким образом, результат определения этапа S2 является отрицательным, процедура, проиллюстрированная на фиг. 1, временно завершается без выполнения какого-либо конкретного управления. Наоборот, когда тормоз задействован, и, таким образом, результат определения этапа S2 является положительным, получается величина давления, приложенного к тормозу (этап S3). Величина давления, приложенного к тормозу, указывает манеру торможения или замедления водителя, и сила нажатия, угол нажатия или т.п. на педаль 16 тормоза могут быть измерены с помощью датчика.
Целевое замедление (или требуемое тормозное усилие) вычисляется на основе величины давления, приложенного к тормозу (этап S4). Соотношение между величиной давления, приложенного к тормозу, и целевым замедлением может быть соответственно определено в конструкции, может быть подготовлено в качестве карты, в которой соотношение определяется в зависимости от веса кузова транспортного средства, типа транспортного средства и скорости транспортного средства посредством эксперимента, моделирования или т.п. Соответственно, вычисление на этапе S4 выполняется на основе полученной величины давления, приложенного к тормозу, скорости транспортного средства в это время, других данных, сохраненных заранее, и карты, подготовленной заранее.
Замедляющая движущая сила вычисляется на основе информации ускорения, полученной на этапе S1 (этап S5). Движущая сила замедления является замедляющей силой или тормозной силой, сформированной от силовой установки 1, и является отрицательной движущей силой, которая называется тормозным усилием, развиваемым двигателем, в транспортном средстве, имеющем установленный в нем двигатель 3. Когда замедляющая движущая сила главным образом формируется посредством насосных потерь в двигателе 3, двигатель 3 активируется за счет подачи топлива при скорости вращения, более низкой или равной скорости возобновления вращения после отключения подачи топлива, и, таким образом, тормозное усилие, развиваемое двигателем, формируется при скорости вращения (или скорости транспортного средства), более высокой или равной предварительно определенной низкой скорости вращения. Замедляющая движущая сила является отрицательным крутящим моментом, основанным на рекуперации энергии электромотора или моторгенераторной установки в случае гибридного транспортного средства или электромобиля.
В целом, относительно большая замедляющая движущая сила требуется в состоянии низкой скорости транспортного средства до состояния высокой скорости транспортного средства. Это обусловлено тем, что скорость транспортного средства в городской местности, как правило, является низкой или средней, а частота ускорения и замедления является высокой в городской местности. Соответственно, замедляющая движущая сила может быть подготовлена как карта заранее, и вычисление на этапе S5 может выполняться с помощью карты. Пример карты проиллюстрирован на фиг. 2. На фиг. 2 ″большая″ и ″небольшая″ представляют величину ускорения, включающего в себя поперечное ускорение Gy, и чем больше становится ускорение, полученное на этапе S1, тем большей становится замедляющая движущая сила (тем большей становится отрицательная движущая сила). Соответствие, в котором замедляющая движущая сила на фиг. 2 заменена снижающим скорость ускорением (замедлением G), проиллюстрировано на фиг. 3. Как проиллюстрировано на фиг. 3, даже когда снижающее скорость ускорение относительно невелико, снижающее скорость ускорение становится больше при высокой скорости транспортного средства, и, таким образом, скорость транспортного средства быстро снижается.
Как описано выше, поскольку ускорение или замедление транспортного средства формируется посредством выполнения водителем операций ускорения и замедления или управления рулевым колесом, продольное ускорение Gx или поперечное ускорение Gy отражают операцию вождения, и, таким образом, склонность к предпочтительной манере вождения может быть понятна из ускорений Gx, Gy. Индекс SPI, описанный в международной публикации PCT №2011/021634, является индексом, указывающим степень склонности к спортивному вождению, вычисленным из объединенного ускорения (=V(Gx2+Gy2)), и включает в себя поперечное ускорение Gy. Соответственно, объединенное ускорение или индекс SPI могут быть отражены в замедляющей движущей силе. Например, как проиллюстрировано на фиг. 1, объединенное ускорение вычисляется с помощью продольного ускорения Gx и поперечного ускорения Gy, включенных в информацию ускорения на этапе S1, а индекс SPI вычисляется из объединенного ускорения (или мгновенного SPI, описанного в международной публикации PCT №2011/021634) способом, описанным в международной публикации PCT №2011/021634 (этап S6). Поскольку индекс SPI, вычисленный таким образом, соответствует ускорению, обозначенному кривыми на фиг. 2 или 3, и кривая, проиллюстрированная на фиг. 2, выбирается на основе индекса SPI, и замедляющая движущая сила вычисляется с помощью выбранной кривой в качестве карты. Соответственно, возможно получать замедляющую движущую силу, в большей степени принимая во внимание склонность к предпочтительной манере вождения или намерение к предпочтительной манере вождения водителя.
В примере, проиллюстрированном на фиг. 2 или 3, отношение варьирования замедляющей движущей силы или снижающего скорость ускорения, чтобы увеличивать ускорение или индекс SPI, постепенно уменьшается. То есть соотношение между ускорением или индексом SPI и замедляющей движущей силой или снижающим скорость ускорением имеет нелинейные характеристики. Эта тенденция отмечена при низкой скорости транспортного средства. Другими словами, когда склонность к предпочтительной манере вождения имеет более сильную потребность в быстром поведении транспортного средства, интенсивность увеличения тормозного усилия силовой установки 1 постепенно уменьшается. Даже когда операция, такая как операция ускорения или замедления или операция рулевого управления, является медленной, поведение транспортного средства может удовлетворительно изменяться, не требуя от водителя значительного управления, и возможно предоставлять транспортное средство, которое может удобно управляться.
После того как целевое замедление вычислено на основе срабатывания тормоза, а замедляющая движущая сила вычислена на основе информации ускорения, совместное управление тормозным усилием тормозных механизмов 15 и замедляющей движущей силой (тормозным усилием силовой установки 1) выполняется так, чтобы добиваться целевого замедления (этап S7). То есть замедление как комбинация тормозных усилий управляется, чтобы достигать целевого замедления.
Соответственно, когда любое одно тормозное усилие уменьшается, другое тормозное усилие задается так, чтобы увеличиваться. В этом случае соотношение тормозных усилий может быть задано подходящим образом. Например, когда динамическая мощность, регенерируемая посредством силовой установки 1, увеличивается, тормозное усилие силовой установки 1 увеличивается, и, таким образом, так называемое фрикционное тормозное усилие тормозных механизмов 15 задается так, чтобы относительно уменьшаться. Наоборот, когда заряд перезаряжаемого аккумулятора ограничен, и, таким образом, количество энергии, регенерируемой посредством силовой установки 1, ограничено, тормозное усилие силовой установки 1 уменьшается, и, таким образом, тормозное усилие тормозных механизмов 15 задается так, чтобы увеличиваться.
Когда индекс SPI вычислен на этапе S6, целевое замедление, вычисленное на этапе S4 вместо продольного ускорения Gx, полученного на этапе S1, может быть применено в качестве продольного ускорения Gx. Соответственно, целевое замедление, используемое для совместного управления на этапе S7, и замедляющая движущая сила, которая должна управляться в совместном управлении, могут быть синхронизированы друг с другом. То есть не возникает отклонения в вычислении их значений или данных, используемых для вычисления, и, таким образом, управляемость улучшается.
Другой пример управления, который выполняется посредством устройства управления движущей силой согласно настоящему изобретению, будет описан ниже со ссылкой на фиг. 4. Пример, описанный в данном документе, является примером, где добавлен этап управления скоростью вращения двигателя с тем, чтобы соответствовать склонности к предпочтительной манере вождения, когда требуется спортивное вождение. Склонность к предпочтительной манере вождения может быть вычислена как индекс SPI, описанный в международной публикации PCT №2011/021634, и, таким образом, сначала вычисляется мгновенный SPI (=V(Gx2+Gy2)), который является объединенным ускорением из продольного ускорения Gx и поперечного ускорения Gy (этап S11). Затем индекс SPI вычисляется на основе мгновенного SPI (этап S12). Способ вычисления индекса SPI может использовать способ, описанный в международной публикации PCT №2011/021634. Также определяется, больше ли степень открытия акселератора, чем степень в закрытом состоянии акселератора (этап S13). Это определение может быть выполнено на основе сигнала, выведенного из датчика открытия акселератора. Когда результат определения на этапе S13 является отрицательным, это означает, что педаль акселератора вернулась в исходное состояние, и степень открытия меньше или равна степени открытия в закрытом состоянии акселератора. Соответственно, транспортное средство находится в состоянии замедления, и, таким образом, движущая сила замедления вычисляется в этом случае (этап S14). Управление на этапе S14 является таким же управлением, что и на этапе S5, проиллюстрированном на фиг. 1.
В транспортном средстве, включающем в себя генератор энергии, такой как моторгенераторная установка или генератор переменного тока, кинетическая энергия транспортного средства регенерируется во время замедления, но величина регенерируемой энергии может быть ограничена в зависимости от состояния заряда устройства хранения энергии или т.п. Соответственно, оптимальная величина регенерируемой энергии вычисляется следом за этапом S14 (этап S15). Это вычисление может быть выполнено посредством вычисления электрической энергии, которая может быть регенерирована, чтобы заряжать устройство хранения энергии в это время, на основе состояния заряда устройства хранения энергии.
Определяется, больше ли скорость Ne вращения двигателя, чем предварительно определенная скорость ON вращения (этап S16). Вкратце этап S16 выполняется, чтобы определять, вращается ли двигатель 3, и, таким образом, предварительно определенная скорость ON вращения является низкой скоростью вращения, близкой к ″0″. Когда результат определения на этапе S16 является отрицательным, это означает, что на этапе S13 определяется, что акселератор находится в закрытом состоянии, и, таким образом, транспортное средство находится в так называемом состоянии движения электрического транспортного средства (EV), в котором транспортное средство движется с помощью электромотора или моторгенераторной установки. То есть, поскольку двигатель 3 останавливается, процедура, проиллюстрированная на фиг. 4, временно завершается без выполнения какого-либо конкретного управления в этом случае. Наоборот, когда результат определения на этапе S16 является положительным, транспортное средство находится в так называемом гибридном (HV) состоянии движения, в котором транспортное средство движется с помощью двигателя 3 и моторгенераторной установки, и двигатель 3 активирован. Соответственно, вычисляется целевое значение нижней предельной скорости (Ne) вращения двигателя в нормальном режиме (этап S17). Нормальный режим является режимом управления, в котором скорость вращения двигателя, передаточное отношение трансмиссии или т.п. управляется с приоритетом, отданным топливной экономичности, и задан заранее в зависимости от типа транспортного средства. Соответственно, в нормальном режиме, поскольку передаточное отношение трансмиссии или скорость вращения двигателя, соответствующая скорости транспортного средства, задана заранее так, чтобы улучшать топливную экономичность, более низкое предельное целевое значение скорости вращения двигателя вычисляется на основе скорости транспортного средства или реального передаточного отношения трансмиссии в это время.
С другой стороны, когда акселератор находится в закрытом состоянии, и, таким образом, результат определения на этапе S13 является отрицательным, определяется, включен ли переключатель мощности (этап S18). Переключатель мощности является переключателем, который задействуется водителем с тем, чтобы переключать режим управления или режим движения в режим мощности, в котором движущая сила увеличивается. Когда переключатель мощности выключен, и, таким образом, результат определения на этапе S18 является отрицательным, определяется, больше ли индекс SPI, чем предварительно определенное пороговое значение α (этап S19). Как описано выше, индекс SPI вычисляется на основе ускорения и имеет большое значение, когда ускорение (положительное и отрицательное ускорение) транспортного средства является большим, или когда ускорение, рассчитанное из степени срабатывания, такой как степень открытия акселератора или угол поворота рулевого колеса, является большим. Соответственно, когда индекс SPI больше порогового значения α, определяется, что водитель выполняет быстрое вождение, в котором формируется большое ускорение, и подразумевает так называемое спортивное вождение. То есть определяется, что склонность к предпочтительной манере вождения является склонностью к спортивному вождению, и целевое значение нижней предельной скорости (Ne) вращения двигателя вычисляется на основе значения индекса SPI в этом случае (этап S20).
Когда склонность к предпочтительной манере вождения является спортивной, то есть когда индекс SPI имеет большое значение, необходимо формировать движущую силу или тормозное усилие, подходящие для склонности к предпочтительной манере вождения, и, таким образом, характеристики управления, такие как скорость вращения двигателя или степень открытия дроссельной заслонки, задаются в характеристики для так называемой высокой мощности. Соответственно, скорость вращения двигателя также управляется, чтобы увеличиваться, а нижняя предельная скорость вращения также устанавливается в высокую скорость вращения. На этапе S20 целевое значение нижней предельной скорости вращения, определенной заранее таким способом, получается из карты или т.п. Когда результат определения на этапе S19 является отрицательным, процедура, проиллюстрированная на фиг. 4, временно завершается без выполнения какого-либо конкретного управления. Когда педаль акселератора нажимается, и, таким образом, результат определения на этапе S13 является положительным, целевое значение нижней предельной скорости вращения двигателя немедленно вычисляется на основе индекса SPI на этапе S20. Целевое значение более высокой скорости вращения выбирается из целевого значения нижней предельной скорости вращения двигателя, вычисленного на этапе S17, и целевого значения нижней предельной скорости вращения двигателя, вычисленного на этапе S20 (этап S21). Выполняется так называемое регулирование с выбором максимума. Целевая скорость вращения двигателя вычисляется на основе целевого значения выбранной нижней предельной скорости вращения двигателя (этап S22).
То есть в примере управления, проиллюстрированном на фиг. 4, скорость вращения двигателя во время замедления увеличивается при подготовке к ускорению, которое, как прогнозируется, должно произойти после замедления. Другими словами, выполняется управление увеличением скорости вращения двигателя, когда тормозное усилие во время замедления в закрытом состоянии акселератора формируется посредством силовой установки 1, включающей в себя двигатель 3, по направлению к скорости вращения, при которой ответная реакция на ускорение является превосходной, с тем, чтобы быстро формировать движущую силу для ускорения во время следующего ускорения. Такое управление скоростью вращения выполняется посредством управления передаточным отношением трансмиссии, когда предусмотрена ступенчатая трансмиссия, и может выполняться посредством управления скоростью вращения двигателя через использование первой моторгенераторной установки 8, в то же время формируя тормозное усилие через использование второй моторгенераторной установки 12 в случае вышеупомянутого гибридного транспортного средства двухмоторного типа. Соответственно, выполняя процедуру управления, проиллюстрированную на фиг. 4, операция торможения во время движения в повороте упрощается, и, таким образом, водитель может концентрировать внимание на рулении. Соответственно, возможно улучшать удобство вождения и улучшать ответную реакцию на ускорение во время отклонения от поворота.
В примере управления, проиллюстрированном на фиг. 4, то же управление, что и управление, проиллюстрированное на фиг. 1, выполняется параллельно. То есть определяется, больше ли ход тормоза, чем предварительно определенное пороговое значение β (этап S23). Ход тормоза является величиной давления, приложенного к педали 16 тормоза, а пороговое значение β является значением, соответствующим свободному ходу педали 16 тормоза. То есть этап S23 является этапом для определения того, действительно ли тормоз фактически задействован. Соответственно, когда результат определения на этапе S23 является отрицательным, процедура, проиллюстрированная на фиг. 4, временно завершается без выполнения какого-либо конкретного управления. Наоборот, когда тормоз задействован, и результат определения на этапе S23 является положительным, целевое замедление вычисляется на основе величины давления, приложенного к тормозу (этап S24), аналогично этапу S4, проиллюстрированному на фиг. 1. Берется замедляющая движущая сила, вычисленная на этапе S14, и совместное управление тормозным усилием тормоза и тормозным усилием силовой установки выполняется тем же способом, что и на этапе S7 на фиг. 1 (этап S25).
Устройство управления движущей силой согласно настоящему изобретению сконфигурировано, чтобы управлять движущей силой замедления (или тормозным усилием), главным образом на основе управляющего командного сигнала от электронного блока 17 управления, и, таким образом, настоящее изобретение может быть описано как функциональное средство следующим образом. То есть устройство управления движущей силой транспортного средства согласно настоящему изобретению сконфигурировано, чтобы вычислять требуемое тормозное усилие на основе величины давления, приложенного к механизму управления тормозом, который задействуется для замедления водителем, и чтобы управлять тормозным усилием силовой установки, которая включает в себя источник приведения в движение, формирующий ускоряющее усилие и тормозное усилие, и тормозным усилием тормозного механизма, который формирует тормозное усилие за счет срабатывания механизма управления тормозом, совместно, так что общее тормозное усилие транспортного средства в целом становится требуемым тормозным усилием, устройство управления движущей силой транспортного средства включает в себя средство обнаружения информации ускорения для обнаружения информации ускорения, включающей в себя поперечное ускорение транспортного средства, и средство управления тормозным усилием силовой установки для управления тормозным усилием силовой установки на основе обнаруженной информации ускорения, когда задействуется механизм управления тормозом.
Устройство управления движущей силой согласно настоящему изобретению может дополнительно включать в себя средство определения склонности к предпочтительной манере вождения для определения склонности к предпочтительной манере вождения на основе информации ускорения.
Устройство управления движущей силой согласно настоящему изобретению может дополнительно включать в себя средство регулирования скорости вращения для увеличения скорости вращения источника приведения в движение до скорости вращения, при которой ответная реакция на ускорение является превосходной в состоянии замедления, после того как воздействие водителя на механизм управления тормозом снято при подготовке к ускорению после того, как замедление заканчивается.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2505432C2 |
| СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2561478C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2499705C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2631150C1 |
| СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2503559C2 |
| УСТРОЙСТВО ПОМОЩИ ДЛЯ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ | 2020 |
|
RU2737180C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОМОТОРОМ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА С ЭЛЕКТРОПРИВОДОМ | 2018 |
|
RU2729837C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ УПРАВЛЕНИЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2657480C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭФФЕКТИВНОЙ МОЩНОСТЬЮ ДЛЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ И СПОСОБ УПРАВЛЕНИЯ ЭФФЕКТИВНОЙ МОЩНОСТЬЮ ДЛЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2011 |
|
RU2526608C2 |
| УСТРОЙСТВО РАСЧЕТА КОЭФФИЦИЕНТА ЗАМЕДЛЕНИЯ | 2011 |
|
RU2565852C1 |
Изобретение относится к системам управления транспортных средств и может быть использовано в устройствах управления транспортными средствами. Устройство управления движущей силой транспортного средства сконфигурировано для вычисления требуемого тормозного усилия на основе величины давления, приложенного к механизму управления тормозом, и для управления тормозным усилием силовой установки и тормозным усилием тормозного механизма, формирующим тормозное усилие за счет срабатывания механизма управления тормозом, совместно, так что общее тормозное усилие транспортного средства в целом становится требуемым тормозным усилием. Силовая установка включает в себя источник приведения в движение, формирующий ускоряющее усилие и тормозное усилие. Устройство управления движущей силой сконфигурировано так, чтобы обнаруживать информацию ускорения, включающую в себя поперечное ускорение транспортного средства, и управлять тормозным усилием силовой установки на основе обнаруженной информации ускорения, когда механизм управления тормозом задействован. Достигается улучшение управляемости транспортным средством. 6 з.п. ф-лы, 7 ил.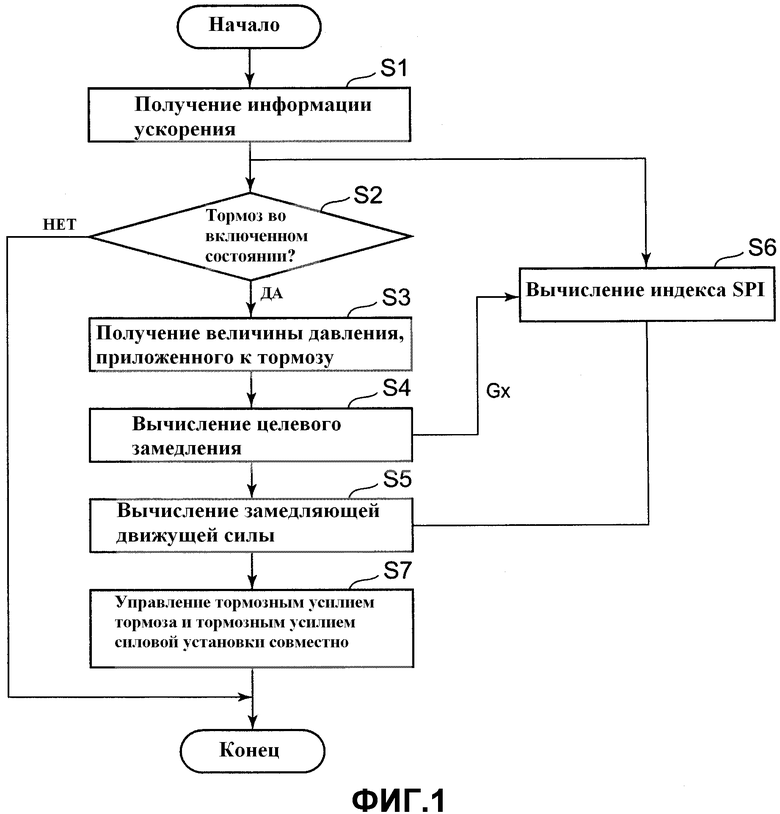
1. Устройство управления движущей силой транспортного средства, выполненное с возможностью вычисления требуемого тормозного усилия на основе величины давления, приложенного к механизму управления тормозом, который задействуется для замедления водителем, и управления тормозным усилием силовой установки, которая включает в себя источник приведения в движение, формирующий ускоряющее усилие и тормозное усилие, и тормозным усилием тормозного механизма, который формирует тормозное усилие за счет срабатывания механизма управления тормозом, совместно, так что общее тормозное усилие транспортного средства в целом становится требуемым тормозным усилием, отличающееся тем, что оно выполнено с возможностью определения информации ускорения, включающей в себя поперечное ускорение транспортного средства, и управления тормозным усилием силовой установки на основе определяемой информации ускорения, когда задействован механизм управления тормозом.
2. Устройство по п. 1, в котором силовая установка включает в себя электромотор и тормозное усилие силовой установки формируется посредством управления рекуперативным крутящим моментом электромотора на основе информации ускорения.
3. Устройство по п. 1 или 2, в котором склонность водителя к предпочтительной манере вождения определяется на основе информации ускорения.
4. Устройство по п. 1 или 2, в котором скорость вращения источника приведения в движение увеличивается до скорости вращения, при которой ответная реакция на ускорение является превосходной в состоянии замедления, после того как воздействие водителя на механизм управления тормозом снимается при подготовке к ускорению, после того как состояние замедления завершается.
5. Устройство по п. 4, в котором скорость вращения, при которой ответная реакция на ускорение является отличной, является первой скоростью вращения источника приведения в движение, когда источник приведения в движение формирует тормозное усилие в состоянии замедления, после того как воздействие водителя на механизм управления тормозом снимается, или второй скоростью вращения, полученной посредством корректировки первой скорости вращения.
6. Устройство по п. 1 или 2, в котором информация ускорения включает в себя ускорение, которое может быть сформировано посредством требуемого тормозного усилия.
7. Устройство по п. 3, в котором интенсивность увеличения тормозного усилия силовой установки постепенно уменьшается, когда определенная склонность к предпочтительной манере вождения имеет более сильную потребность в быстром характере поведения транспортного средства.
| JP 2011207466 A, 20.10.2011 | |||
| JP 2006015952 A, 19.01.2006 | |||
| JP 2010007540 A, 14.01.2010 | |||
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2405693C1 |

