Изобретение относится к оптико-электронной промышленности, а именно к способу и устройству для бесконтактного управления и ввода информации.
Известны различные способы и устройства дистанционного ввода информации в виде так называемых презентаторов и маркеров. С их помощью реализуется альтернативный ввод информации в персональный компьютер посредством привычных движений рукой. Также существует технология распознавания жестов с видеокамеры для бесконтактного управления компьютерными программами.
Недостатком презентаторов и маркеров для бесконтактного управления и ввода информации является низкая точность позиционирования и большой размер самих устройств. Недостатком технологии распознавания жестов с видеокамеры являются низкая точность позиционирования и низкая скорость реакции из-за сложности обработки видеоданных.
За прототип взято изобретение «Laser-based user input device for electronic projection displays)) - номер американской заявки US 2003/0222849 A1. Данный прототип для бесконтактного управления и ввода информации состоит из лазерной указки, мульти-мегапиксельного сенсора света или камеры и контроллера, который подключается к компьютеру. Мульти-мегапиксельный сенсор света или камеры размещают за проекционным экраном и с его помощью определяют точку на проекционном экране, в которую направляется луч лазерной указки. Контроллер получает от нескольких пикселей датчика света сигнал от соответствующего узкого пучка видимого света, направленного на экран дисплея. Контроллер коррелирует узкий пучок видимого света с точки на экране дисплея и генерирует сигнал управления на основе местоположения экрана. Полученные координаты точки интерпретируются в управляющие команды, в частности для управления курсором на проекционном экране.
Недостатком данного прототипа в том, что он работает только с проекционными экранами, причем за либо перед проекционным экраном должно быть пространство для размещения мультисенсорного приемника. Кроме того, мультисенсорный приемник является дорогостоящим, так как состоит из матрицы фотодиодов. Кроме того, указанный прототип не может определять пространственные координаты лазерной указки.
Задачей настоящего изобретения является создание принципиально нового устройства, состоящего из поляризационного маркера и приемника, основанного на других оптических явлениях, что позволит удешевить устройство и сделать его более надежным за счет избавления от механических узлов.
Указанные задачи достигаются тем, что на приемнике 1 (фиг.1), размещенном в рабочей плоскости 2 монитора компьютера или телевизора, или экрана проектора, или иного устройства, размещают поляриметры 3, связанные с микропроцессором 4, в котором производится обработка поступающих с них сигналов. Сигналы формируются из световых импульсов, посылаемых с поляризационного маркера 5. А сам поляризационный маркер состоит из пустотелого цилиндрического поляризатора 6 (фиг.2), источника света 7, излучающего в инфракрасной области спектра, отражателя 8, линз 9 и 10 и прозрачного корпуса 11. Пустотелый цилиндрический поляризатор 6 выполнен из полимерной поляризующей пленки. Такая пленка может быть изготовлена путем нанесения на нее решетки, являющейся разновидностью дифракционной решетки. В частности, решетка представляет собой набор штрихов треугольной формы. На одну из граней каждого штриха напыляется алюминиевое покрытие. Такая решетка на полимерной пленке с количеством штрихов в несколько сотен или тысяч на миллиметр, обладает поляризующими свойствами для инфракрасной области света. Кроме того, такую поляризующую пленку можно изогнуть и при этом она не потеряет своих поляризующих свойств. В поляризационном маркере пленка свернута в цилиндр в виде пустотелого цилиндрического поляризатора 6. Если теперь его изнутри осветить источником света 7, то часть лучей пройдет сквозь стенки цилиндрического поляризатора 6 и выходящие из него лучи станут поляризованными, причем направления векторов поляризации радиально выходящих лучей будут иметь осевую симметрию относительно воображаемой оси поляризационного маркера 5. При этом штрихи решетки могут располагаться как вдоль оси цилиндра, так и поперек - вокруг цилиндра. В зависимости от направлений штрихов на цилиндре направления векторов поляризации будут иметь осевую симметрию либо по кругу (фиг.3) вокруг воображаемой оси поляризационного маркера, либо вектора поляризации будут лежать в плоскостях, пересекающихся вдоль данной оси. А для того чтобы поляризованные лучи выходили не только по бокам поляризационного маркера, но и спереди с максимальным охватом пространства, предлагается использовать компоновку из различных линз и отражателей. Для этого лучи выходящие из источника света 7 (фиг.4) условно разделяются на два сектора: центральный сектор 12 вдоль воображаемой оси цилиндрического поляризатора с апертурным углом около 30 градусов и боковой сектор 13. Источник света 7 (фиг.5) расположен в задней части пустотелого цилиндрического поляризатора 6. Излучение от источника света 7 направляется на вогнутую конусную линзу 9. При этом пучок лучей центрального сектора превращается в бесселевой пучок, и апертурный угол обоих секторов увеличивается. Преломленные лучи направляются на стенки цилиндрического поляризатора 6, поверх которого надет цилиндрический отражатель 8 с внутренней зеркальной поверхностью. Вследствие этого лучи, пройдя через поляризатор, попадают на отражатель 8 и отражаются в направлении торцевой части поляризационного маркера, на котором находится отрицательная линза 10. Лучи из центрального сектора попадают на линзу 10. Данная линза 10 выполнена в виде выпукло конусной линзы. Такая форма линзы преломляет лучи таким образом, чтобы крайние лучи пересеклись с воображаемой осью цилиндрического поляризатора 6. А лучи из бокового сектора выводятся наружу через прозрачный корпус 11.
Для того чтобы увеличить апертурный угол выходящих лучей из обоих секторов и уменьшить «мертвые зоны» между соседними лучами выходящих пучков 12 и 13, прозрачному корпусу 11 (фиг.6) придается поперечная кривизна, а линза 10 выполнена в виде плоско-выпуклой конусной линзы с вогнутой конусной поверхностью - вариант А. Вогнутость можно придать и обратной стороне линзы 10, в этом случае отрицательная линза 10 выполнена в виде вогнуто-выпуклой конусной линзы - вариант Б.
В другом варианте лучи, прошедшие через цилиндрический поляризатор 6, далее преломляются с помощью вытянутой отрицательной конусной торпедообразной линзы 14 (фиг.7), которая размещается над цилиндрическим поляризатором 6. В этом случае цилиндрический отражатель не используется. Для увеличения апертурного угла выходящих пучков из вогнуто конусной линзы 9 - ее плоская сторона может быть выполнена выпуклой.
Поляризационный маркер предназначен в качестве манипулятора, которым управляет пользователь. Но для того чтобы интерпретировать движения поляризационного маркера в управляющие команды, необходимо определять направление и пространственное положение поляризационного маркера. Эту задачу выполняет приемник 1 и подключенный к нему микропроцессор 4. Приемник 1 состоит из нескольких поляриметров 3, размещаемых в рабочей плоскости 2 и разнесенных на заранее определенном расстоянии друг от друга. В случае если в качестве рабочей плоскости используется монитор, то поляриметры целесообразно размещать по ширине монитора. Минимальное количество поляриметров в приемнике - два. В качестве поляриметров могут использоваться неохлаждаемые болометры 15 (фиг.8), состоящие из двух, трех или четырех перекрещивающихся решеток. Каждая решетка болометра состоит из нескольких параллельных металлических проволок диаметром в несколько микрон. Проволока может быть, например, из никеля или платины. Излучение света нагревает проволоки и они меняют свое электрическое сопротивление. Причем известно, что направление электрического вектора линейно поляризованной падающей световой волны относительно направления проволоки болометра влияет на изменение ее электрического сопротивления. Таким образом, измеряя соотношения изменений электрического сопротивления на всех решетках, можно вычислить направление поляризации падающего света. Чем больше решеток в поляриметре, тем выше точность измерения. Каждая болометрическая решетка подключается к быстродействующему высокочувствительному аналого-цифровому преобразователю, который в свою очередь подключается к микропроцессору 4.
Другим вариантом поляриметров является использование группы анализаторов с линейной поляризаций. Каждый такой анализатор представляет собой дихроичный линейный поляризатор. Анализаторы размещаются рядом, в общей плоскости, но при этом направление линейной поляризации каждого анализатора повернуты относительно друг друга, например азимут первого анализатора 16 (фиг.9) равен 0 градусов, азимут второго анализатора 17 равен 45 градусов, азимут третьего анализатора 18 равен 90 градусов и азимут четвертого анализатора 19 равен 135 градусов. Под каждый анализатор помещается фотодатчик. Каждый фотодатчик подключается к быстродействующему высокочувствительному аналого-цифровому преобразователю, который в свою очередь подключается к микропроцессору 4.
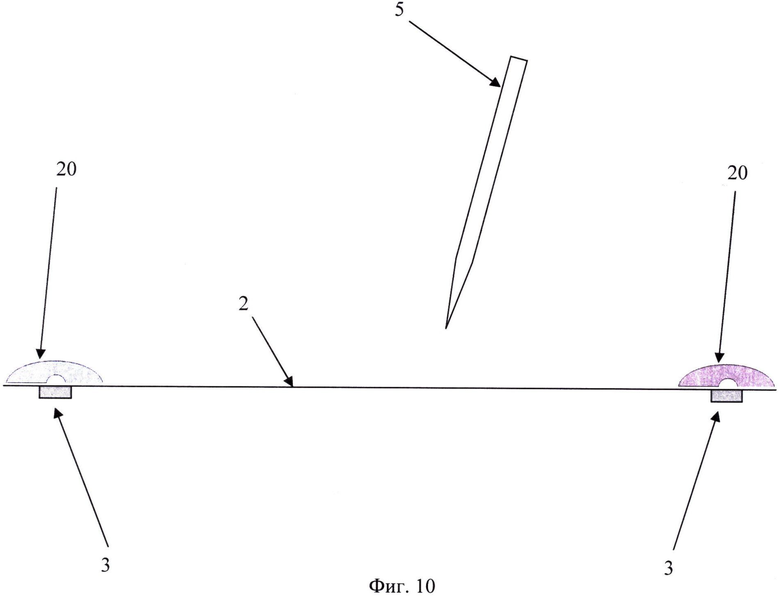
Дополнительно над поляриметрами могут быть установлены светофильтры для пропускания узкого спектра, излучающего источником света 7. Для того чтобы поляриметры могли ловить свет от поляризационного маркера, когда тот находится вблизи рабочей плоскости, над поляриметрами 3, в частности, устанавливаются менисковые линзы 20 типа «рыбий глаз» (фиг.10) с углом обзора не менее 180 градусов. Если поляриметр 3 состоит из группы анализаторов, то менисковую линзу 20 целесообразно устанавливать отдельно над каждым анализатором, чтобы исключить искажения, вызванные фокусировкой и смещением пятна.
Дополнительно в приемнике могут быть установлены, по меньшей мере, две скоростные цифровые фотокамеры, разнесенные на заранее определенном расстоянии друг от друга и связанные с микропроцессором. Над цифровыми фотокамерами также установлены менисковые линзы типа «рыбий глаз». Кроме менисковых линз возможно использование дополнительных линз для фокусировки излучения.
Способ бесконтактного управления с помощью поляризационного маркера 5 реализуется следующим образом. В поляризационном маркере 5 включается источник света 7 и начинает светить в импульсном режиме, посылая импульсы с заранее известной частотой. Инфракрасный свет, испускаемый источником света 7, проходит через стенки пустотелого цилиндрического поляризатора и систему из линз, и отражателей в поляризационном маркере 5, описанных выше, и далее лучи выходят в пространство линейно поляризованные. Причем направления векторов поляризации радиально выходящих из поляризационного маркера лучей имеют осевую симметрию вокруг воображаемой оси поляризационного маркера 5. Для того чтобы охватить поляризованными лучами пространство впереди поляризационного маркера, лучи от источника света 7 пропускают изнутри пустотелого цилиндрического поляризатора 6 и при этом часть выходящих лучей преломляют через отрицательную линзу 10.
Далее пользователь для управления перемещает поляризационный маркер 5 в пространстве перед рабочей плоскостью 2, на которой закреплен приемник 1. В приемнике 1 установлено, по меньшей мере, два поляриметра 3, разнесенных по сторонам приемника 1. Излучение из поляризационного маркера 5 попадает на поляриметры 3. В поляриметрах 3 применяется известный дифференциальный метод измерения линейной поляризации. Поляриметры 3 расположены так, что позволяют определить направление поляризации вдоль рабочей плоскости 2. Сигналы с поляриметров поступают в аналого-цифровой преобразователь и затем в микропроцессор 4, где происходит окончательная обработка сигналов. Для того чтобы отфильтровать шумы и помехи, используются светофильтры, пропускающие узкий спектр излучения, на котором работает источник света 7, и частотная модуляция полученных сигналов по известной частоте импульсов источника света 7. Поляриметрами 3 фиксируют направления векторов поляризации в рабочей плоскости 2 и далее с помощью микропроцессора 4 и необходимого программного обеспечения строят воображаемые линии вдоль направлений векторов и по их пересечению определяют координаты точки пересечения данных воображаемых линий в рабочей плоскости 2, которая указывает на направление поляризационного маркера 5. Полученная информация далее с помощью микропроцессора 4 интерпретируется в управляющие команды.
Если для управления требуется определять углы наклона поляризационного маркера 5 относительно рабочей плоскости 2, то в приемнике размещают дополнительные поляриметры в разных взаимно перпендикулярных плоскостях, например: дополнительные поляриметры размещают перпендикулярно рабочей плоскости. Это дает возможность определять углы наклона поляризационного маркера относительно рабочей плоскости. Однако такой способ работает, если поляризационный маркер 5 находится вблизи рабочей плоскости 2.
Чтобы определять углы наклона поляризационного маркера 5, когда тот находится на удалении от рабочей плоскости 2, на приемнике дополнительно с поляриметрами 3 предлагается установить две скоростные цифровые фотокамеры, размещаемые рядом с поляриметрами и также подключаемые к микропроцессору 4 через аналого-цифровой преобразователь. Их задача - определять координаты источника света 7 поляризационного маркера в пространстве методом фототриангуляции. Получив с помощью поляриметров 3 координаты точки на рабочей плоскости 2, в которую направлен поляризационный маркер 5 и получив с помощью цифровых фотокамер координаты источника света 7 поляризационного маркера 5 в пространстве, несложно вычислить углы положения поляризационного маркера относительно рабочей плоскости 2. Кроме того, определив координаты источника света 7 в пространстве, можно узнать расстояние от поляризационного маркера до рабочей плоскости. Для увеличения угла обзора, цифровые фотокамеры помещаются в частности под менисковые линзы типа «рыбий глаз» с углом обзора не менее 180 градусов. А на поляризационном маркере 5 может быть установлен дополнительный источник света, координаты которого будут фиксировать цифровые фотокамеры, причем дополнительный источник света может излучать в другом спектре и может размещаться на тыльной стороне поляризационного маркера 5. В случае применения болометров 15 в качестве поляриметров - каждая цифровая фотокамера может быть размещена под болометром 15 и под общей менисковой линзой 20.
В целом поляризационный маркер может быть изготовлен с использованием полупроводникового светодиода в ИК диапазоне, пустотелый поляризационный цилиндр может быть сделан на основе фторопластовой подложки, на которую наносятся штрихи нужной конфигурации методом фотолитографии. Для преломления и отражения инфракрасных лучей используются известные материалы для инфракрасной оптики, например селенид цинка и т.д. Оптоэлектроника приемника изготавливается либо на основе полупроводниковых фотодиодов и ПЗС матриц, либо с использованием неохлаждаемых решетчатых болометров, решетки которых могут быть выполнены из микронной никелевой проволоки. Микропроцессор и аналого-цифровой преобразователь изготавливается на существующей элементной базе с возможностью подключения к персональному компьютеру, например по протоколу USB. Для питания поляризационного маркера могут использоваться обычные батарейки или аккумуляторы.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОЛЯРИМЕТР ПОГРУЖНОЙ ДЛЯ КОНТРОЛЯ ДОЛИ АРОМАТИЧЕСКИХ УГЛЕВОДОРОДОВ В СВЕТЛЫХ НЕФТЕПРОДУКТАХ | 2018 |
|
RU2680861C1 |
| ПОЛЯРИМЕТР ПОГРУЖНОЙ ДЛЯ КОНТРОЛЯ ДОЛИ АРОМАТИЧЕСКИХ УГЛЕВОДОРОДОВ В СВЕТЛЫХ НЕФТЕПРОДУКТАХ | 2020 |
|
RU2730040C1 |
| СПОСОБ ИЗМЕРЕНИЯ КОНЦЕНТРАЦИИ САХАРА И САХАРИМЕТР ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2002 |
|
RU2224240C2 |
| Поляриметр для измерения концетрации сахара в моче | 1990 |
|
SU1749783A1 |
| ТУРБОПОЛЯРИМЕТР | 2004 |
|
RU2269101C1 |
| Панорамный поляриметр | 1990 |
|
SU1784876A1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ОПТИЧЕСКИХ ХАРАКТЕРИСТИК И СПОСОБ ИЗМЕРЕНИЯ ОПТИЧЕСКИХ ХАРАКТЕРИСТИК | 2012 |
|
RU2544876C1 |
| ИЗМЕРИТЕЛЬ ТОКА ОПТИЧЕСКИЙ МНОГОКАНАЛЬНЫЙ ДЛЯ ВЫСОКОВОЛЬТНЫХ СЕТЕЙ | 2023 |
|
RU2819134C1 |
| БЛОК ПРЕЦИЗИОННОГО ПОЗИЦИОНИРОВАНИЯ ОПТИЧЕСКИ ПРОЗРАЧНОГО НОСИТЕЛЯ ИНФОРМАЦИИ И УСТРОЙСТВО ДЛЯ СЧИТЫВАНИЯ ДАННЫХ | 2022 |
|
RU2813742C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА ЛИНЕЙНОЙ ПОЛЯРИЗАЦИИ СВЕТА ПРИ ОТРАЖЕНИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2109256C1 |
Настоящее изобретения относится к оптико-электронной промышленности. Технический результат заключается в повышении надежности устройства. В поляризационном маркере лучи поляризуются с помощью специального цилиндрического поляризатора, проходят через систему линз и отражателей и выводятся в пространство, причем направление векторов поляризации имеет осевую симметрию вокруг воображаемой оси поляризационного маркера. Приемное устройство, размещенное в рабочей плоскости, определяет направление и пространственное положение поляризационного маркера относительно приемника, которые с помощью микропроцессора интерпретируются в управляющие команды. Приемное устройство состоит из поляриметров, разнесенных на заранее определенном расстоянии друг от друга. Поляриметры определяют направление векторов поляризации падающих лучей со стороны поляризационного маркера. На основании полученных данных с каждого поляриметра микропроцессор вычисляет направление и углы положения поляризационного маркера. 2 н. и 16 з.п. ф-лы, 11 ил.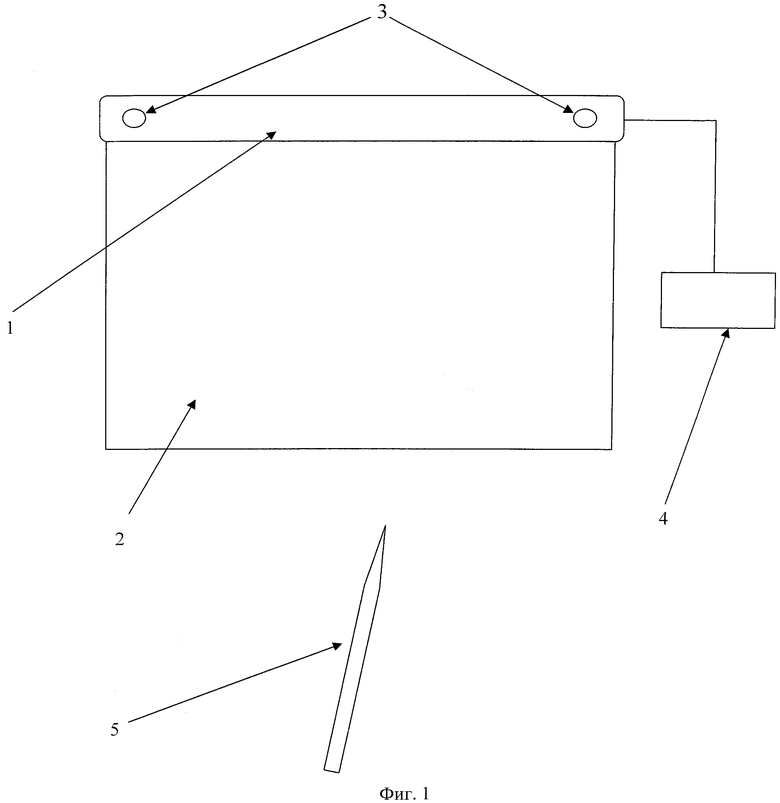
1. Способ бесконтактного управления с помощью поляризационного маркера заключается в том, что для управления используют поляризационный маркер, состоящий из пустотелого цилиндрического поляризатора, источника света, лучи которого проходят сквозь стенки цилиндрического поляризатора, отражателей и линз, выполненный таким образом, чтобы направления векторов поляризации радиально выходящих лучей из поляризационного маркера имели осевую симметрию относительно воображаемой оси поляризационного маркера, а на стороне приемника, состоящего из нескольких поляриметров, разнесенных на заранее определенном расстоянии друг от друга, фиксируют поляризованный свет, поступающий от поляризационного маркера, определяют поляриметрами направления векторов поляризации и на основании полученных данных вычисляют с помощью микропроцессора направление и пространственное положение поляризационного маркера относительно приемника, которые интерпретируют в управляющие команды.
2. Способ по п.1, отличающийся тем, что лучи от источника света пропускают изнутри пустотелого цилиндрического поляризатора, при этом часть выходящих лучей преломляют через отрицательную линзу, так чтобы охватить поляризованными лучами пространство впереди поляризационного маркера.
3. Способ по п.1, отличающийся тем, что в приемнике поляриметры устанавливают в рабочей плоскости, фиксируют ими направления векторов поляризации в указанной плоскости и далее по пересечению двух воображаемых линий, проходящих через полученные направления векторов поляризации, определяют координаты точки пересечения данных воображаемых линий, которая и указывает на направление поляризационного маркера.
4. Способ по п.1, отличающийся тем, что на стороне приемника размещают поляриметры в разных взаимно перпендикулярных плоскостях и определяют направления векторов поляризации в данных плоскостях.
5. Способ по п.1, отличающийся тем, что источник света работает в импульсном режиме с заранее заданной частотой, значение которой используются в приемнике для фильтрации шумов.
6. Способ по п.1, отличающийся тем, что на стороне приемника дополнительно используют по меньшей мере две цифровые фотокамеры, связанные с микропроцессором, с помощью которых методом фототриангуляции фиксируют координаты источника света, находящегося на поляризационном маркере и затем сопоставляя их с координатами точки на рабочей плоскости, в которую направлен поляризационный маркер, вычисляют углы положения поляризационного маркера относительно рабочей плоскости.
7. Комплекс для бесконтактного управления, включающий в себя:
поляризационный маркер, состоящий из пустотелого цилиндрического поляризатора, источника света, лучи которого проходят сквозь стенки цилиндрического поляризатора, отражателей и линз, выполненных с возможностью вывода поляризованных лучей с наибольшим покрытием пространства спереди и вокруг поляризационного маркера,
приемник, состоящий из нескольких поляриметров, разнесенных на заранее определенном расстоянии друг от друга с возможностью определять направление векторов поляризации лучей от поляризационного маркера,
и микропроцессор, связанный с поляриметрами приемника.
8. Комплекс для бесконтактного управления по п.7, отличающийся тем, что в поляризационном маркере в качестве источника света используют инфракрасный светодиод.
9. Комплекс для бесконтактного управления по п.7, отличающийся тем, что в поляризационном маркере в качестве пустотелого цилиндрического поляризатора используют пленочный, решетчатый поляризатор, свернутый в цилиндр.
10. Комплекс для бесконтактного управления по п.7, отличающийся тем, что в поляризационном маркере источник света расположен внутри задней части пустотелого цилиндрического поляризатора, перед источником света размещается вогнутая конусная линза, а поверх пустотелого цилиндрического поляризатора надет отражатель в виде цилиндра с внутренней зеркальной поверхностью, на переднем торце пустотелого цилиндрического поляризатора находится отрицательная линза.
11. Комплекс для бесконтактного управления по п.10, отличающийся тем, что отрицательная линза на переднем торце пустотелого цилиндрического поляризатора выполнена в виде плоско-выпуклой конусной линзы с вогнутой конусной поверхностью.
12. Комплекс для бесконтактного управления по п.10, отличающийся тем, что отрицательная линза на переднем торце пустотелого цилиндрического поляризатора выполнена в виде вогнуто-выпуклой конусной линзы.
13. Комплекс для бесконтактного управления по п.7, отличающийся тем, что поверх пустотелого цилиндрического поляризатора надета вытянутая отрицательная конусная торпедообразная линза.
14. Комплекс для бесконтактного управления по п.7, отличающийся тем, что в приемнике в качестве поляриметров используют неохлаждаемые болометры с перекрещивающимися приемными решетками.
15. Комплекс для бесконтактного управления по п.7, отличающийся тем, что в приемнике в качестве поляриметров используют группу анализаторов с линейной поляризацией, расположенных в общей плоскости и повернутых относительно друг друга направлениями пропускания поляризованного света на заранее заданный угол, и под каждым анализатором находится фотодатчик.
16. Комплекс для бесконтактного управления по п.7, отличающийся тем, что в приемнике над поляриметрами установлены менисковые линзы типа «рыбий глаз».
17. Комплекс для бесконтактного управления по п.7, отличающийся тем, что в приемнике дополнительно установлены по меньшей мере две скоростные цифровые фотокамеры, разнесенные на заранее определенном расстоянии друг от друга и связанные с микропроцессором.
18. Комплекс для бесконтактного управления по п.17, отличающийся тем, что в приемнике над цифровыми фотокамерами установлены менисковые линзы типа «рыбий глаз».
| US 6498860 B1, 24.12.2002 | |||
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| JP 2000206445, 28.07.2000 | |||
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |

