ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Данное раскрытие относится к методам для емкостных датчиков касания, которые используют перо, например, при определении положения электростатического пера в пределах емкостного датчика касания.
УРОВЕНЬ ТЕХНИКИ
Датчики касания, такие как те, которые используются в сенсорных экранах для портативных устройств и для мониторов, могут манипулироваться с использованием пишущего инструмента, такого как перо, тем самым позволяя выполнять ввод информации, относящейся к пользовательскому вводу. Например, перо может использоваться для касания различных областей датчика касания. Пользовательский ввод, принимаемый датчиком касания, также может включать в себя обнаружение перемещения пера, такое как прием информации, касающейся некоторого вида письма или нанесения меток, являющегося результатом движения пера по датчику касания.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Данное описание изобретения относится к системам, способам и методам для использования емкостного датчика касания с пером с тонким пишущим элементом.
В общем, некоторые аспекты предмета изобретения, описанного в данном описании изобретения, могут быть воплощены в способах, которые задействуют датчик и перо. Другие варианты осуществления данного аспекта включают в себя соответствующие системы, устройства и компьютерные программы, выполненные с возможностью выполнения действий способов, кодированных на запоминающих устройствах компьютера.
В общем, другой аспект предмета изобретения, описанного в данном описании изобретения, может быть воплощен в способах, которые включают в себя действия, относящиеся к емкостному датчику касания и электростатическому перу. Некоторые аспекты характеризуют способ для использования активного пера, позволяющего выполнять определение двумерного положения активного пера относительно емкостного датчика касания, где емкостный датчик касания имеет двумерную матрицу проводников, выполненную в виде первого массива проводников, расположенных рядами, и второго массива проводников, расположенных столбцами, и где активное перо имеет электрод и активные компоненты. Способ включает в себя прием первого сигнала в активном пере от по меньшей мере одного из столбцов в матрице, измерение интенсивности сигнала каждого первого сигнала, принимаемого от столбцов, использование измеренных интенсивностей сигнала для вычисления первого положения активного пера по первой оси матрицы емкостного датчика касания и передачу вычисленного первого положения активного пера по первой оси матрицы емкостного датчика касания. Способ включает в себя передачу второго сигнала от электрода активного пера на по меньшей мере один из рядов матрицы для указания второго положения активного пера по второй оси матрицы, где емкостный датчик касания выполнен с возможностью определения второго положения по второй оси матрицы, основываясь на принятом втором сигнале. Электрод расположен в активном пере и выполнен с возможностью электростатической связи с емкостным датчиком касания, и электрод активного пера выполнен с возможностью как приема, так и передачи сигналов.
Каждый из этих и других вариантов осуществления может необязательно включать в себя один или более из следующих признаков. Способ может включать в себя, перед приемом первого сигнала в активном пере или передачи второго сигнала, прием третьего сигнала в активном пере от емкостного датчика касания для синхронизации временной оси активного пера с временной осью емкостного датчика касания. Третий сигнал для синхронизации может приниматься в активном пере посредством канала связи. Канал связи может представлять собой канал беспроводной связи, ультразвуковой канал или оптический канал. Канал связи может быть выполнен с возможностью приема или передачи информации, относящейся к по меньшей мере одному из активного пера или емкостного датчика касания. Третий сигнал может приниматься от по меньшей мере одного столбца в первом массиве столбцов, для которого третий сигнал может приниматься в активном пере посредством электрода по меньшей мере на одном столбце. Третий сигнал может приниматься из импульса, который одновременно передается по многочисленным столбцам в первом массиве столбцов. Третий сигнал может приниматься один раз на временной кадр. Временной кадр может включать в себя временной интервал, распределенный для приема пером третьего сигнала. Временной кадр может включать в себя временной интервал, распределенный для передачи каждым из столбцов первого сигнала с емкостного датчика касания. Временной кадр может включать в себя временной интервал, распределенный для передачи вычисленного первого положения от активного пера. Временной кадр может включать в себя временной интервал, распределенный для передачи каждым из многочисленных активных перьев соответствующего первого положения. Передача вычисленного первого положения от активного пера может быть выполнена так, что происходит посредством канала связи. Каналом связи может быть беспроводный канал, ультразвуковой канал или оптический канал. Передача вычисленного первого положения от активного пера может быть выполнена так, что происходит посредством электростатической связи электрода активного пера с матрицей, и по меньшей мере один из рядов может быть выполнен с возможностью приема вычисленного первого положения от электрода активного пера. Передачи активного пера могут быть выполнены так, что происходят одновременно с многочисленными передачами других активных перьев или столбцов, используя многочисленные ортогональные формы волны. Передачи активного пера могут быть выполнены так, что происходят с многочисленными передачами других активных перьев или столбцов, используя одновременные многочисленные сигналы с частотным разделением. Передачи активного пера могут быть выполнены так, что происходят с многочисленными передачами других активных перьев или столбцов, используя одновременные многочисленные сигналы с кодовым разделением. Способ может включать в себя интерполирование для вычисления первого и второго положений активного пера. Активное перо может включать в себя: переключатель, соединенный с электродом, который может быть выполнен с возможностью мультиплексирования относительно большого напряжения и относительно малого тока, где переключатель может быть выполнен с возможностью передачи напряжения на электрод в режиме передачи и приема тока от электрода в режиме приема; схему приемника для тока, которая может быть соединена с переключателем для приема по меньшей мере части тока через переключатель от электрода; схему передатчика для напряжения, которая соединена с переключателем для передачи по меньшей мере части напряжения через переключатель на электрод; микроконтроллер, соединенный со схемами приемника и передатчика; и внутренний источник питания для подачи питания на по меньшей мере микроконтроллер. Микроконтроллер может быть выполнен с возможностью вычисления координат активного пера в отношении расположений на емкостном датчике касания, и предоставления отчета по меньшей мере о некоторых координатах от активного пера. Микроконтроллер может быть дополнительно выполнен с возможностью интерполирования для вычисления координат активного пера. Внутренний источник питания может включать в себя батарею или суперконденсатор. Ток может быть порядка одного микроампера, и напряжение может быть порядка ста вольт. Активное перо может иметь кончик, который выполнен с возможностью взаимодействия с матрицей емкостного датчика касания. Кончик пера может включать в себя датчик усилия для выполнения измерения усилия посредством пера.
В общем, другой аспект предмета изобретения, описанного в данном описании изобретения, может быть воплощен в способах для использования емкостного датчика касания, позволяющего определять двумерное положение активного пера в отношении емкостного датчика касания, где емкостный датчик касания имеет двумерную матрицу проводников, выполненных в виде первого массива проводников, расположенных рядами, и второго массива проводников, расположенных столбцами, и где активное перо имеет электрод и активные компоненты. Способ включает в себя передачу первого сигнала от по меньшей мере одного из столбцов в матрице на активное перо для указания первого положения активного пера по первой оси матрицы емкостного датчика касания, и прием второго сигнала от электрода активного пера на одном или более рядах матрицы для указания второго положения активного пера по второй оси матрицы. Емкостный датчик касания выполнен с возможностью определения второго положения по второй оси матрицы, основываясь на принятом втором сигнале, и емкостный датчик касания выполнен с возможностью электростатической связи с электродом, расположенным в активном пере.
Каждый из этих и других вариантов осуществления может необязательно включать в себя один или более из следующих признаков. Способ может включать в себя, перед передачей первого сигнала или приемом второго сигнала, передачу третьего сигнала на активное перо от емкостного датчика касания для синхронизации временной оси активного пера с временной осью емкостного датчика касания. Третий сигнал может передаваться от по меньшей мере одного столбца в первом массиве столбцов на активное перо посредством электрода. Третий сигнал может передаваться с импульсом, который одновременно передается о многочисленных столбцов в первом массиве столбцов. Третий сигнал может передаваться один раз на временной кадр. Временной кадр может включать в себя временной интервал, распределенный для передачи третьего сигнала на перо. Временной кадр может включать в себя временной интервал, распределенный для передачи каждым столбцом первого сигнала от емкостного датчика касания. Временной кадр может включать в себя временной интервал, распределенный для передачи каждым из многочисленных активных перьев второго сигнала, используемого для определения положения этого пера по второй оси. Способ может включать в себя прием вычисленного первого положения активного пера по первой оси матрицы емкостного датчика касания, где прием вычисленного первого положения от активного пера выполнен так, что происходит посредством электростатической связи электрода активного пера с матрицей, и для которого по меньшей мере один из рядов выполнен с возможностью приема вычисленного первого положения от электрода активного пера.
В общем, другой аспект предмета изобретения, описанного в данном описании изобретения, может быть воплощен в активном пере, выполненным с возможностью работы с емкостным датчиком касания. Активное перо включает в себя электрод, выполненный с возможностью как приема, так и передачи сигналов, и выполненный с возможностью электростатической связи с емкостным датчиком касания. Активное перо включает в себя переключатель, соединенный с электродом, который выполнен с возможностью мультиплексирования относительно большого напряжения и относительно малого тока, где переключатель выполнен с возможностью передачи напряжения на электрод в режиме передачи и приема тока от электрода в режиме приема. Активное перо включает в себя средство для приема тока от электрода через переключатель и для передачи напряжения, которое подается через переключатель на электрод. Активное перо включает в себя микроконтроллер, соединенный со схемами приемника и передатчика и выполненный с возможностью определения по меньшей мере одного положения активного пера в отношении расположений на емкостном датчике касания. Активное перо включает в себя внутренний источник питания для подачи питания на по меньшей мере микроконтроллер.
Каждый из этих и других вариантов осуществления может необязательно включать в себя один или более из следующих признаков. Микроконтроллер может быть выполнен с возможностью вычисления координат активного пера в отношении расположений на емкостном датчике касания и предоставления отчета по меньшей мере о некоторых координатах от активного пера. Микроконтроллер может быть выполнен с возможностью интерполирования при вычислении координат активного пера. Активное перо может включать в себя канал связи, которым может быть беспроводный канал, ультразвуковой канал или оптический канал, и внутренним источником питания может быть батарея или суперконденсатор. Ток может быть порядка одного микроампера, и напряжение может быть порядка ста вольт.
В общем, другой аспект предмета изобретения, описанного в данном описании изобретения, может быть воплощен в активном пере, выполненным с возможностью работы с емкостным датчиком касания. Активное перо включает в себя электрод, выполненный с возможностью как приема, так и передачи сигналов, и выполненный с возможностью электростатической связи с емкостным датчиком касания. Активное перо включает в себя переключатель, соединенный с электродом, который выполнен с возможностью мультиплексирования относительно большого напряжения и относительно малого тока, для которых переключатель выполнен с возможностью передачи напряжения на электрод в режиме передачи и приема тока от электрода в режиме приема. Активное перо включает в себя схему приемника для приема тока от электрода через переключатель, схему передатчика для передачи напряжения, которое подается через переключатель на электрод, микроконтроллер, соединенный со схемами приемника и передатчика и выполненный с возможностью определения по меньшей мере одного положения активного пера в отношении расположений на емкостном датчике касания, и внутренний источник питания для подачи питания на по меньшей мере микроконтроллер.
В общем, другой аспект предмета изобретения, описанного в данном описании изобретения, может быть воплощен в емкостном датчике касания, выполненном с возможностью определения двумерного положения активного пера в отношении емкостного датчика касания, где активное перо имеет электрод и активные компоненты. Емкостный датчик касания включает в себя двумерную матрицу проводников, выполненных так, что включают в себя: первый массив проводников, расположенных рядами; второй массив проводников, расположенных столбцами; передатчики, соединенные со вторым массивом проводников, причем передатчики выполнены с возможностью передачи первого сигнала от по меньшей мере одного из столбцов в матрице на активное перо для указания первого положения активного пера по первой оси матрицы емкостного датчика касания; и приемники, соединенные с первым массивом проводников, причем приемники выполнены с возможностью приема второго сигнала от электрода активного пера в одном или более рядах матрицы для указания второго положения активного пера по второй оси матрицы. Емкостный датчик касания выполнен с возможностью определения второго положения по второй оси матрицы, основываясь на принятом втором сигнале. Емкостный датчик касания выполнен с возможностью электростатической связи с электродом, расположенным в активном пере.
В общем, другой аспект предмета изобретения, описанного в данном описании изобретения, может быть воплощен в емкостном датчике касания, выполненным с возможностью определения двумерного положения активного пера в отношении емкостного датчика касания, где активное перо имеет электрод и активные компоненты. Емкостный датчик касания имеет двумерную матрицу проводников, выполненных так, что включают в себя: первый массив проводников, расположенных рядами; второй массив проводников, расположенных столбцами; и средство для передачи первого сигнала от по меньшей мере одного из столбцов в матрице на активное перо для указания первого положения активного пера по первой оси матрицы емкостного датчика касания, и приема второго сигнала от электрода активного пера на одном или более рядах матрицы для указания второго положения активного пера по второй оси матрицы. Емкостный датчик касания выполнен с возможностью определения второго положения по второй оси матрицы, основываясь на принятом втором сигнале. Емкостный датчик касания выполнен с возможностью электростатической связи с электродом, расположенным в активном пере.
В общем, другой аспект предмета изобретения, описанного в данном описании изобретения, может быть воплощен в способе для передачи и приема сигналов в активном пере для емкостного датчика касания, где активное перо включает в себя электрод и по меньшей мере одну схему для приема тока через электрод и для передачи напряжения на электрод. Способ включает в себя в режиме передачи выполнение схемы с возможностью передачи напряжения через узел, соединенный с электродом, посредством: генерирования напряжения, используя схему многорежимного источника питания, где схема многорежимного источника питания включает в себя по меньшей мере катушку индуктивности и диод, и где диод соединен с трансформатором; предоставления возможности диоду периодически смещаться в прямом направлении в режиме передачи, и току протекать через диод в паразитную емкость; и выполнение переключателя в режиме передачи с возможностью электрического изолирования по меньшей мере некоторых из компонентов в схеме, выполненной с возможностью приема тока в режиме приема, от напряжения, образуемого на паразитной емкости. Способ включает в себя в режиме приема выполнение схемы с возможностью приема тока через узел, соединенный с электродом, посредством: выполнения переключателя с возможностью приема тока в компоненты в схеме, выполненной с возможностью приема тока в режиме приема, и выполнение диода с возможностью смещения его в обратном направлении в режиме приема, так что по меньшей мере некоторые из компонентов в схеме, выполненной с возможностью приема тока в режиме приема, электрически изолируются от индуктивности трансформатора в схеме многорежимного источника питания.
Каждый из этих и других вариантов осуществления может необязательно включать в себя один или более из следующих признаков. Резистор может быть соединен с диодом. Способ может включать в себя обеспечение опорного напряжения на по меньшей мере одном выводе резистора, которое больше напряжения заземления схемы. Способ может включать в себя в режиме приема посылку по меньшей мере части принятого тока в схему приемника тока, где схема приемника тока управляется микроконтроллером. Переключатель может быть выполнен в режиме передачи с возможностью электрического изолирования по меньшей мере некоторых компонентов в схеме, выполненной с возможностью приема тока в режиме приема, от напряжения, образуемого на паразитной емкости, связанной с одним или более компонентами в узле, соединенном с электродом. Способ может включать в себя размещение второй заранее заданной емкости параллельно паразитной емкости в узле, соединенном с электродом. Способ может включать в себя прием тока порядка одного микроампера и передачу напряжения порядка ста вольт. Схема многорежимного источника питания может включать в себя схему обратного хода.
В общем, другой аспект предмета изобретения, описанного в данном описании изобретения, может быть воплощен в устройстве для передачи и приема сигналов в активном пере для емкостного датчика касания. Устройство имеет по меньшей мере одну схему для приема тока от электрода и для передачи напряжения на электрод. Устройство включает в себя электрод, компоненты, выполненные с возможностью приема тока в режиме приема, переключатель и схему многорежимного источника питания, включающую в себя по меньшей мере трансформатор и диод, где диод соединен с трансформатором. В режиме передачи схема для передачи напряжения на электрод выполнена с возможностью: генерирования напряжения, используя схему многорежимного источника питания, выполнения диода с возможностью периодического смещения в прямом направлении в режиме передачи, и протекания тока через диод в паразитную емкость, и выполнение переключателя в режиме передачи с возможностью электрического изолирования по меньшей мере некоторых из компонентов, выполненных с возможностью приема тока в режиме приема, от напряжения, образуемого на паразитной емкости. В режиме приема схема для приема тока от электрода выполнена с возможностью: выполнения переключателя с возможностью приема тока в компоненты, выполненные с возможностью приема тока в режиме приема, и выполнения диода с возможностью смещения в обратном направлении в режиме приема, так что по меньшей мере некоторые из компонентов, выполненных с возможностью приема тока в режиме приема, электрически изолируются от индуктивности трансформатора в схеме многорежимного источника питания.
Каждый из этих и других вариантов осуществления может необязательно включать в себя один или более из следующих признаков. Схема многорежимного источника питания может включать в себя схему обратного хода. Устройство может включать в себя резистор, где резистор соединен с диодом. Схема может быть выполнена с возможностью подачи опорного напряжения на по меньшей мере один вывод резистора, которое больше напряжения заземления схемы. Схема может быть выполнена с возможностью посылки в режиме приема по меньшей мере части принятого тока в схему приемника тока, где схема приемника тока может управляться микроконтроллером. Паразитная емкость может включать в себя паразитную емкость, связанную с одним или более компонентами в узле, соединенном с электродом. Устройство может включать в себя вторую заранее заданную емкость, которая располагается параллельно паразитной емкости в узле, соединенном с электродом. Принятый ток может быть порядка одного микроампера, и в котором передаваемое напряжение может быть порядка ста вольт.
В общем, другой аспект предмета изобретения, описанного в данном описании изобретения, может быть воплощен в системе для передачи и приема сигналов в активном пере для емкостного датчика касания, для которого система имеет по меньшей мере одну схему для приема тока от электрода и для передачи напряжения на электрод. Система включает в себя электрод, компоненты, выполненные с возможностью приема тока в режиме приема, переключатель и схему многорежимного источника питания, имеющую по меньшей мере трансформатор и диод, для которой диод соединен с трансформатором. В режиме передачи схема для передачи напряжения на электрод выполнена с возможностью: генерирования напряжения, используя схему многорежимного источника питания; выполнения диода с возможностью периодического смещения его в прямом направлении в режиме передачи, и протекания тока через диод в паразитную емкость; и средство для электрического изолирования по меньшей мере некоторых из компонентов, выполненных с возможностью приема тока в режиме приема, от напряжения, образуемого на паразитной емкости. В режиме приема схема для приема тока от электрода выполнена с возможностью выполнения переключателя с возможностью приема тока в компоненты, выполненные с возможностью приема тока в режиме приема, и средство для электрического изолирования по меньшей мере некоторых из компонентов, выполненных с возможностью приема тока в режиме приема, от индуктивности трансформатора в схеме многорежимного источника питания.
Каждый из этих и других вариантов осуществления может необязательно включать в себя один или более из следующих признаков. Схема многорежимного источника питания может включать в себя схему обратного хода. Система может включать в себя резистор, где резистор может быть соединен с диодом. Схема может включать в себя средство для подачи опорного напряжения на по меньшей мере один вывод резистора, которое больше напряжения заземления схемы. Схема может иметь средство для посылки в режиме приема по меньшей мере части принятого тока в схему приемника тока, где схема приемника тока управляется микроконтроллером. Паразитная емкость может включать в себя паразитную емкость, связанную с одним или более компонентами в узле, соединенном с электродом. Система может включать в себя вторую заранее заданную емкость, которая располагается параллельно паразитной емкости в узле, соединенном с электродом. Принятый ток может быть порядка одного микроампера, и передаваемое напряжение может быть порядка ста вольт.
В общем, другой аспект предмета изобретения, описанного в данном описании изобретения, может быть воплощен в схеме для передачи и приема сигналов с электродом в активном пере. Схема включает в себя первый, второй и третий резисторы, первый и второй транзисторы, трансформатор, первый диод, усилитель и конденсатор. Первый резистор соединен с входным выводом и первым транзистором. Первый транзистор включает в себя первый вывод, соединенный с резистором, второй вывод, соединенный с узлом заземления, третий вывод, соединенный с первой обмоткой трансформатора. Трансформатор имеет первую обмотку, подсоединенную между выводом для источника питания и третьим выводом первого транзистора, и вторую обмотку, подсоединенную между узлом заземления и анодом первого диода. Первый диод имеет катод, соединенный с узлом, который соединен с электродом, выполненным с возможностью приема и передачи сигналов емкостным датчиком касания. Второй резистор подсоединен между узлом, который соединен с электродом, и опорным напряжением. Второй транзистор включает в себя первый вывод, соединенный с узлом, соединенным с электродом, второй вывод, соединенный с выводом для переключаемого сигнала, и третий вывод, соединенный с инвертирующим входом усилителя. Усилитель имеет неинвертирующий вход, который соединен с опорным напряжением. Третий резистор подсоединен между инвертирующим входом усилителя и выходом усилителя. Конденсатор подсоединен между инвертирующим входом усилителя и выходом усилителя. Опорное напряжение выполнено большим, чем напряжение узла заземления и меньшим, чем напряжение источника питания. Схема выполнена так, что имеет режим приема для приема тока через узел, соединенный с электродом, и режим передачи для передачи напряжения через узел, соединенный с электродом. В режиме приема первый диод выполнен с возможностью смещения в обратном направлении, и второй транзистор выполнен с возможностью электрического соединения первого и третьего выводов второго транзистора. В режиме передачи первый диод выполнен с возможностью периодического смещения в прямом направлении, и второй транзистор выполнен с возможностью образования разомкнутой цепи для электрического разъединения первого и третьего выводов второго транзистора.
Каждый из этих и других вариантов осуществления может необязательно включать в себя один или более из следующих признаков. Принятый ток может быть порядка одного микроампера, и передаваемое напряжение может быть порядка ста вольт. Схема может включать в себя второй диод, для которой второй диод может быть подсоединен параллельно второму и третьему выводам первого транзистора.
Подробности одного или более вариантов осуществления предмета изобретения, описанного в данном описании изобретения, излагаются на прилагаемых чертежах и в описании ниже. Другие признаки и аспекты предмета изобретения станут очевидны из описания, чертежей и формулы изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 изображает схему реализации активного пера.
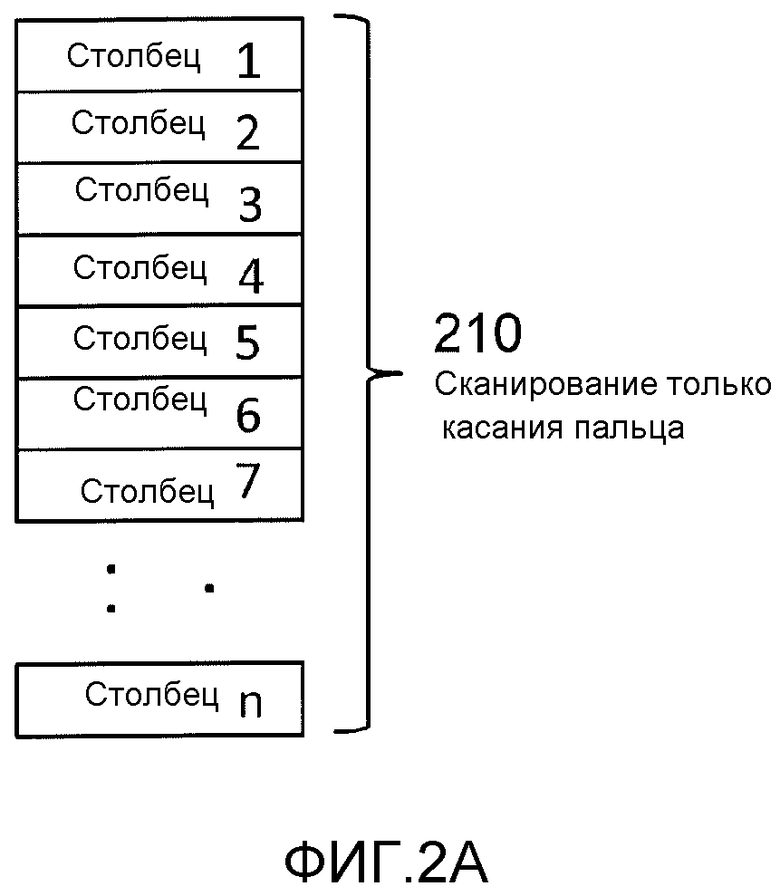
Фиг. 2A изображает чертеж, описывающий разделение кадра на временные интервалы только с касанием пальца.
Фиг. 2B изображает чертеж, описывающий разделение кадра на временные интервалы с касанием пальца и пера.
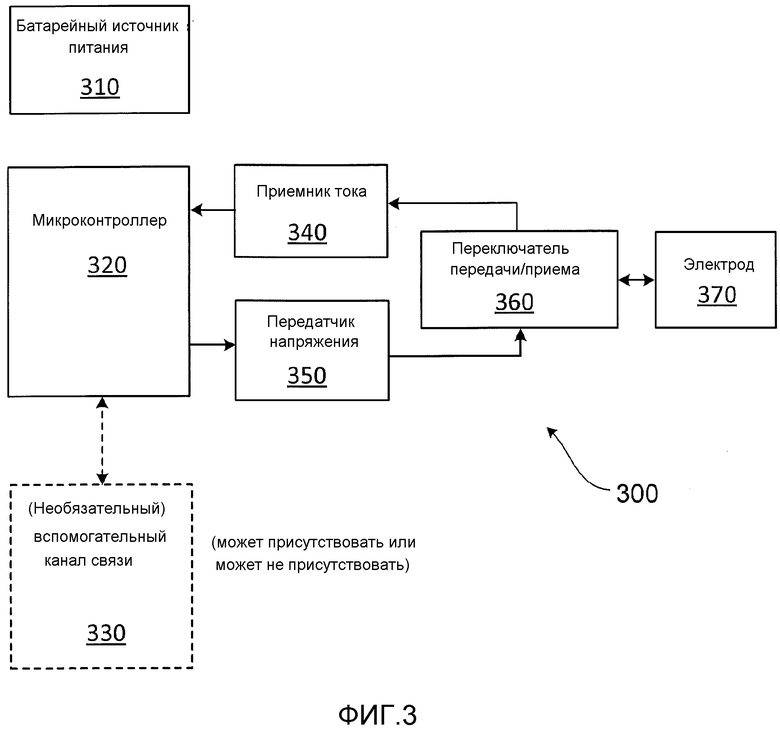
Фиг. 3 изображает блок-схему активного пера.
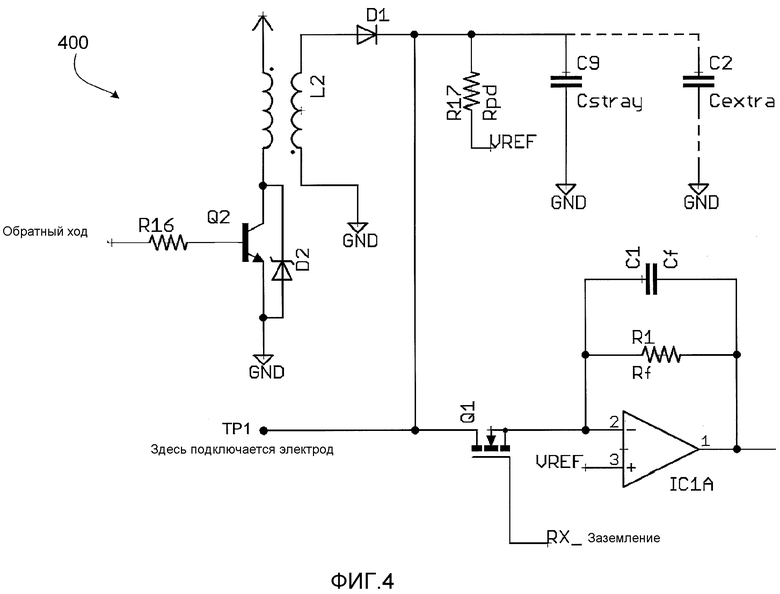
Фиг. 4 изображает чертеж схемы для передачи и приема сигналов на единственном электроде.
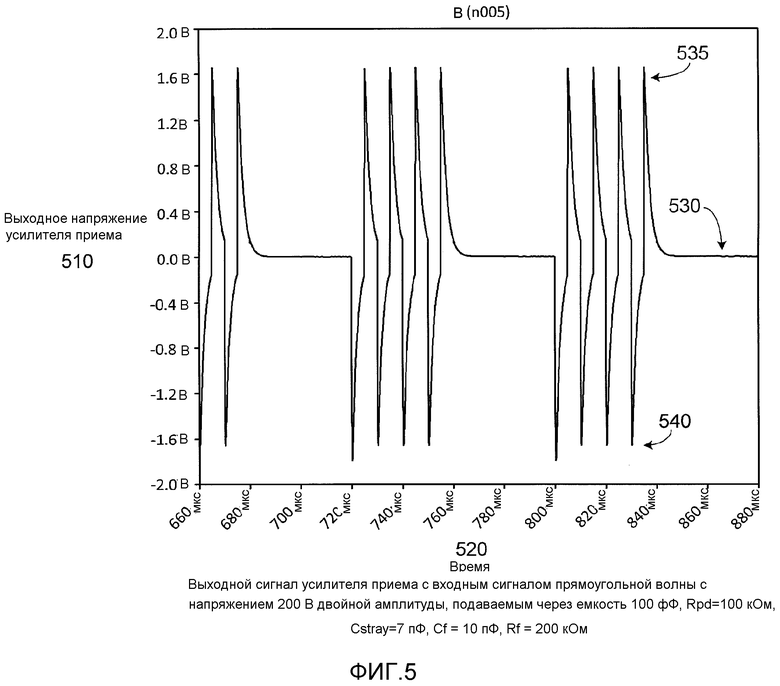
Фиг. 5 изображает чертеж с примером выходного напряжения усилителя приемника в зависимости от времени.
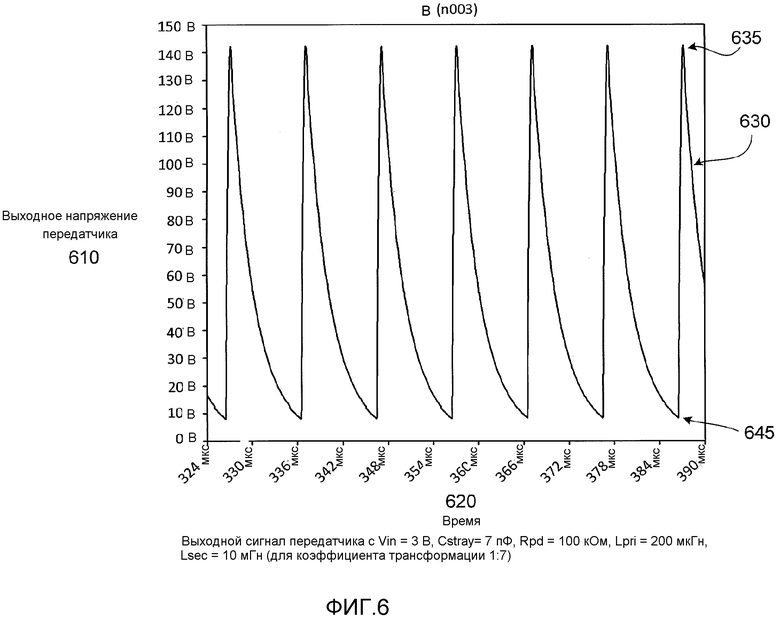
Фиг. 6 изображает чертеж с примером выходного напряжения передатчика в зависимости от времени.
Подобные ссылочные позиции и обозначения на различных чертежах обозначают подобные элементы.
ПОДРОБНОЕ ОПИСАНИЕ
Существуют способы обнаружения положения пальца человека на двумерном массиве датчиков и в соответствии с его влиянием на электрическое поле. Эти способы предусматривают матрицу проводящих рядов и столбцов, приблизительно под прямым углом друг к другу. Например, датчик может измерять емкость от каждого ряда к каждому столбцу, выполняя m*n измерений для матрицы с m рядами и n столбцами. Это измерение может выполняться посредством приложения напряжения возбуждения к данному столбцу и измерения результирующего тока (через эту емкость) на данном ряду. Может быть произвольным, какая ось обозначается в качестве рядов по отношению к столбцам.
Это измерение может обнаруживать положение пальца человека, так как палец человека, будучи в некоторой степени проводящим и соединенным с некоторым относительно небольшим импедансом с узлом заземления схемы контроллера, оказывает влияние на емкость в пересечениях матрицы, где он касается. Емкость может увеличиваться вследствие высокой (и комплексной, так как является проводящей и, следовательно, с потерями) диэлектрической постоянной пальца человека или уменьшаться вследствие соединения пальца с заземлением в соответствии с конкретной конструкцией датчика.
В любом таком датчике m*n измерений (или некоторое выбранное их подмножество) могут выполняться периодически с некоторой частотой кадров, например, 100 Гц. Эта частота кадров может представлять собой компромисс между шумом и временем реакции. Низкая частота кадров может учитывать продолжительные времена интегрирования при измерении, что имеет тенденцию снижения шума, но задержка может быть неудобной для пользователя. Высокая частота кадров может обеспечивать быструю реакцию, но малое время для измерения и может, поэтому, обеспечивать зашумленные измерения. Полное время кадра может делиться на временные интервалы, при этом один столбец (или многочисленные столбцы, например, два столбца, если отображение разделено на половинки или четверти) возбуждается в течение каждого временного интервала. Если приемник обеспечивается для каждого ряда, например, тогда все ряды могут измеряться одновременно. Если нет, тогда меньшее количество приемников может мультиплексироваться среди рядов, причем кадр разбивается на еще большее количество временных интервалов.
В некоторых применениях может быть желательным отслеживать не палец человека, а некоторое перо, которое может удерживаться в руке. Палец может быть относительно большим по сравнению с пером, и перо с тонким пишущим элементом может обеспечивать лучшую точность указания. Перо также может выполнено с кнопками или другими датчиками (колесиками прокрутки и т.д.) на его поверхности, чтобы предоставить пользователю дополнительные степени свободы для ввода. С некоторыми типами сенсорных экранов любой предмет может использоваться в качестве пера. (Например, резистивный сенсорный экран может реагировать на усилие и может использоваться с любым жестким предметом.) Но емкостный сенсорный экран может не реагировать на касание непроводящим пером, так как такое перо не нарушает существенным образом электрическое поле. Уточнение, может быть некоторый эффект, наблюдаемый из-за диэлектрической постоянной пера, которая может быть выше, чем у воздуха и, таким образом, увеличивает измеренную емкость, но этот эффект является относительно небольшим, приводя к незначительному нарушению электрического поля.
Емкостный сенсорный экран может реагировать на касание электрически проводящим пером, если это перо удерживается в руке заземленного пользователя. Такое перо может быть выполнено так, что имеет электрически проводящий кончик (в основном, эластичный) и проводящий путь от кончика до тела пользователя. По существу, перо может выполнять почти тоже, что и палец пользователя. Но так как палец человека создает пятно несколько более ~5 мм при прижатии к датчику, ряды и столбцы могут быть размещены с промежутком этого порядка. Это может быть минимальным промежутком, требуемым для правильного интерполирования и для выполнения измерения положения с более высоким разрешением, чем шаг датчика. Проводящее перо, поэтому, также может иметь кончик порядка этих 5 мм в диаметре, чтобы (a) обеспечивать достаточно большое изменение емкости для достижения допустимого отношения сигнал-шум, и (b) обеспечивать сигнал, который охватывает по меньшей мере два пересечения матрицы, что является желательным, чтобы датчик имел возможность интерполировать для более высокого разрешения. Таким образом, перо с кончиком, который менее этих ~5 мм, может быть желательным, так как перо с тонким пишущим элементом меньше закрывает отображаемое изображение и обеспечивает более высокую точность, чем перо, которое не имеет кончика с тонким пишущим элементом. Перо с тонким пишущим элементом может позволять пользователю более безошибочно и точно выполнять указание, чем палец человека обычного размера или перо с относительно толстым кончиком, например, около этих ~5 мм. Палец человека или перо с толстым кончиком может не указывать так точно, как перо с относительно тонким или коротким кончиком, и кончик пальца или перо с толстым кончиком могут способствовать относительно существенному загораживанию при указании на матрице.
Для емкостных сенсорных экранов сигнал, который обеспечивается (например, из-за нарушения краевого электрического поля от пера), может быть пропорциональным площади соприкосновения датчика. Заостренное или тонкое перо в непосредственно близости к датчику может иметь небольшой эффект, и этот эффект не может быть легко измерен по отношению к шуму. В некоторых реализациях заостренное или тонкое перо также не может легко интерполироваться, так как емкостный сенсорный экран имеет шаг, например, около 5 мм (например, так как площадь соприкосновения пальца человека на сенсорном экране составляет обычно по меньшей мере 5 мм). В других реализациях интерполирование может выполняться пока шаг датчика меньше площади соприкосновения воздействующего предмета. Например, даже если ряды и столбцы размещены через 5 мм между центрами, положение может сообщаться с разрешением лучше этих 5 мм посредством использования интерполирования. Например, палец или перо с толстым кончиком может находиться на ½ ряда 1 и ½ ряда 2, что может интерполироваться как 1,5. Этот пример может работать, если площадь соприкосновения является достаточно большой и охватывает по меньшей мере два ряда (или столбца).
Чтобы улучшить отношение сигнал-шум по сравнению с отношением у пассивного пера с тонким пишущим элементом, рассматривается активное перо. Это перо, вместо простого соединения с заземлением через руку пользователя, содержит активные электронику и способно принимать или передавать сигнал на свой кончик. В этом смысле, перо может быть выполнено так, как показано на фиг. 1.
Фиг. 1 изображает реализацию активного пера 100, которое находится в непосредственной близости к проводящим рядам и столбцам в матрице 160, и которое имеет проводящий корпус 110 и тонкий металлический проводник, образующий его кончик 120. Перо 100 имеет непроводящий корпус кончика 130, который позволяет линиям 140 электрического поля из матрицы 160 выходить из пера 100.
В некоторых реализациях емкость между кончиком пера и рядом или столбцом в матрице может быть равна почти полностью краевой емкости и может быть относительно небольшой по сравнению, например, с емкостью между рядом и столбцом в матрице. Например, для датчика, имеющего ромбические сетки проводников на рядах и столбцах на шаге ~5 мм и для тонкого электрода в пере длиной ~20 мм, результирующая емкость может быть порядка 100 фФ к ряду или столбцу непосредственно под пером. Ромбическая сетка проводников показана и описана в заявке на патент США №12/857 024, поданной 16 июля 2010 г., раскрытие которой включено путем ссылки. Перо тогда заземляется через руку пользователя. С пером с металлическим корпусом емкость связи от пера к руке пользователя является относительно большой (например, сотни пФ), так что емкость пользователя на заземление, которая обычно меньше, но составляет по меньшей мере 10 пФ, преобладает над импедансом от заземления схемы пера к заземлению схемы для электроники управления датчика. Так как эта емкость является большой по сравнению с емкостью 100 фФ от кончика пера до датчика, заземление схемы контроллера и пера находятся грубо под одинаковым потенциалом. Так как связь является емкостной, является неуместной постоянная (DC) составляющая напряжения от заземления схемы пера к заземлению схемы контроллера. Переменная (AC) составляющая данного напряжения может проявляться как шум. По мере увеличения емкости между заземлением схемы пера и заземлением схемы контроллера уменьшается величина данного напряжения шума для данного тока шума. В реализации эта емкость может быть достаточно большой, чтобы поддерживать напряжение шума в пределах допустимого диапазона для надлежащей работы пера.
Чтобы измерить положение пера по одной оси, перо может принимать сигнал, передаваемый по столбцам. Чтобы это выполнить, временная ось пера сначала синхронизируется с временной осью электроники управления для датчика. Это может достигаться посредством передачи отличительного сигнала синхронизации (например, на другой частоте, или модулированного отличительной структурой) одновременно по всем столбцам матрицы. Это обеспечивает привязку ко времени для пера. Перо после этого может поддерживать свою привязку ко времени, используя кварц или другой стандарт частоты в пере. Импульс синхронизации может, в основном, передаваться один раз на кадр; но в некоторых случаях, он может передаваться более или менее часто, в соответствии с задержкой, необходимой для системы, и долговременной точностью стандарта частоты пера. Перо может выполнять поиск этого импульса синхронизации, и, когда перо принимает импульс синхронизации, возвращает в исходное состояние свою собственную временную ось. После этого электроника управления сканирует датчик обычным образом посредством возбуждения каждого столбца последовательно при помощи обычной формы волны напряжения. Посредством измерения тока, принимаемого на каждом ряду, контроллер измеряет емкость от каждого ряда к каждому столбцу, и, таким образом, измеряет касание пальца обычным образом. Одновременно перо измеряет интенсивность принятого сигнала в течение каждого временного интервала столбца. Если перо принимает сигнал в течение данного временного интервала, тогда перо определяет, что оно располагается близко к этому столбцу. Что касается геометрии, как показано на фиг. 1, перо может принимать измеряемый сигнал по почти пяти столбцам и может интерполировать для определения своего положения по оси x (предполагая, произвольно, что ось x проходит перпендикулярно столбцам) с более высоким разрешением.
Например, перо может первоначально возвратить в исходное состояние свою временную ось, когда оно принимает импульс синхронизации в момент времени, произвольно обозначенный как t=0. После этого перо может иметь сведения, что контроллер будет возбуждать столбцы 1-n в моменты времени t=1, 2, … n. Если перо принимает энергию во временном интервале 7, тогда перо определяется находящимся рядом со столбцом 7. Это может обеспечивать грубое (например, порядка шага датчика около 5 мм) положение, и интерполирование может использоваться для получения точного положения.
Затем, чтобы определить положение пера по другой оси, дополнительный временной интервал добавляется к кадру, в котором ни один из столбцов не передает. Вместо этого, перо передает этот же сигнал, который использовался бы для возбуждения столбца. Посредством просмотра выходов приемников, присоединенных к каждому ряду, может определяться положение пера по оси y. Один или более приемников в сенсорном экране могут принимать этот сигнал, передаваемый пером, если энергия принимается конкретным приемником, тогда контроллер может определить, что перо находится близко к этому конкретному ряду. Этот процесс может быть аналогичным процессу, посредством которого определялось положение по оси x, но с переставленными передатчиком и приемником. (По оси x многочисленные столбцы передали в многочисленным временных интервалах, и перо приняло. По оси y перо передало в одном временном интервале, и многочисленные ряды приняли). Как для случая касания пальцем, ряды принимают сигнал, и столбцы передают сигнал, но перо как принимает, так и передает сигналы. Перо передает для определения расположения самого себя среди рядов и принимает для определения расположения самого себя среди столбцов. Из этих определений расположения может использоваться интерполяция для определения более точного расположения на датчике касания.
Если присутствуют многочисленные перья, тогда они могут определять свое положение по оси x параллельно, но каждому перу требуется отдельный временной интервал для определения своего положения по оси y. Разделение всего времени кадра на временные интервалы, поэтому, выглядит так, как показано на фиг. 2A и 2B.
Фиг. 2B изображает случай, когда одновременно определяется расположение многочисленных перьев в одном кадре, и каждому перу назначается единственный временной интервал для определения его положения по рядам. Фиг. 2A изображает кадр 210 с n временными интервалами для n столбцов для случая, когда сканирование пытается обнаружить только касание пальца. Для сканирования как касания пальца, так и пера, фиг. 2B изображает кадр 220, где добавляется временной интервал 225 для импульса синхронизации, сохраняется n временных интервалов 235 для n столбцов, и добавляется m временных интервалов для m перьев, где n и m представляют собой целые числа, которые больше или равны единице, причем m соответствует количеству перьев.
Посредством этого процесса координата y может быть вычислена в электронике управления на хосте (например, устройстве с вычислительными возможностями), где она может быть передана обратно в прикладное программное обеспечение по тому же тракту что и информация о касания пальца (например, по линии связи универсальной последовательной шины (USB) обратно в компьютер). Другими словами, положение по рядам может быть вычислено на основе сигналов, принимаемых приемниками ряда. Поэтому положение по рядам может быть вычислено этой же частью системы, которая вычисляет, например, касания пальца. Эти положения по рядам могут передаваться обратно в систему, например, по USB или другой линии связи.
Но координата x вычисляется в пере и может транслироваться обратно в прикладное программное обеспечение различным образом. Другими словами, положения по столбцам могут быть вычислены как функция сигналов, принимаемых пером, и положения по столбцам могут сообщаться системе (например, используя беспроводное или проводное соединение с компьютера на хост). В одном примере, если перо подключено к системе при помощи проводов, например, тогда линия связи может устанавливаться посредством этого подключения посредством проводов, и подключение посредством проводов также может обеспечивать общее заземление между датчиком и пером. В другом примере, перо может передавать информацию в систему беспроводным образом. Например, эта информация может передаваться электростатически через саму матрицу, посредством добавления многочисленных временных интервалов и передачи двоично-кодированной координаты x одним битом на временной интервал. Это не требует дополнительных аппаратных средств, но вместо этого может выполняться посредством модифицирования программного обеспечения управления пера, чтобы другим образом использовать существующие аппаратные средства. Конкретно, это может выполняться с использованием аппаратных средств, которые иначе использовались для генерирования сигнала, используемого для определения расположения пера по оси y. Например, перо может передавать координатную информацию с пера на хост через матрицу, где передатчики и приемники, которые используются для определения расположения пера, также могут использоваться для передачи информации, используя любые схемы беспроводного кодирования, которые используются для передачи информации по беспроводному каналу. Поэтому, временной интервал может быть добавлен для каждого бита координаты, например, и в течение этого временного интервала перо может передавать, если соответствующий бит находится в «1», или не передавать, если соответствующий бит находится в «0». Эта схема соответствует амплитудной манипуляции (ASK), но могут использоваться другие схемы кодирования. Посредством добавления временных интервалов в систему информация может передаваться с пера обратно на хост через матрицу, используя существующие аппаратные средства. Может использоваться код обнаружения ошибок или коррекции ошибок для повышения устойчивости системы к случайным битовым ошибкам из-за шума.
Координата x также может передаваться по вспомогательному каналу, например, каналу радиочастотной связи, подобному линии связи по стандарту Института инженеров по электротехнике и радиоэлектронике IEEE 802.15.4. Скорость передачи битов может быть относительно низкой, так как необходимо передавать только одну координату на перо на кадр, так что с 16-битовым положением и 100 кадрами в секунду, например, общая скорость передачи битов составляет 1600 бит/с. Посредством использования вспомогательного канала может не требоваться дополнительное время в кадре для передачи положения через матрицу. Это может позволять системе резервировать больше времени на выполнение измерений емкости касания пальца (и измерений положения пера), приводя к более высокому отношению сигнал-шум (SNR). Если вспомогательный канал используется для передачи координаты x, тогда этот вспомогательный канал также может использоваться для синхронизации временной оси электроники управления с временной осью пера, устраняя необходимость дополнительного временного интервала для импульса синхронизации. Это может дополнительно увеличить доступное время в кадре, таким образом повышая SNR. Могут использоваться другие типы каналов связи, включая, например, другие линии радиочастотной (RF) связи, ультразвуковые линии связи и оптические линии связи.
Вспомогательный канал также может улучшить рабочие характеристики до такой степени, что устраняется необходимость в импульсе синхронизации, передаваемом через матрицу. Импульс синхронизации выполняется с возможностью появления на всех столбцах (или, по меньшей мере, на многих столбцах равномерно разнесенных по матрице, например, на одном на каждые три столбца), чтобы он принимался пером независимо от расположения пера. Следовательно, общая мгновенная передаваемая энергия больше, чем для случая, когда возбуждается единственный столбец, и более вероятно, что будет вызывать проблемы электромагнитной совместимости (EMC). Если импульс синхронизации вместо этого передается по вспомогательному каналу, тогда исключается этот эффект, так как становится необязательным импульс синхронизации через матрицу.
Этот же путь, используемый для передачи координаты x, также может использоваться для передачи другой информации, например, состояния переключателей или других элементов управления, присоединенных к перу. Может сообщаться величина датчика усилия в кончике пера, например, для различения касания пера от зависания пера и обеспечения непрерывного измерения усилия пера. В этом отношении, может использоваться единственный датчик усилия в пере, возможно устраняя необходимость многочисленных датчиков усилия по всей матрице или, возможно, обеспечивая измерение более высокого качества усилия посредством пера, в то время как многочисленные датчики усилия по всей матрице одновременно используются для измерения усилия пальца или других касаний не пером.
Фиг. 3 изображает блок-схему некоторых из компонентов пера 300. Перо 300 включает в себя приемник 340 тока, передатчик 350 напряжения и микроконтроллер 320 для установления последовательности операций между приемником 340 тока и передатчиком 350 напряжения. Перо 300 также включает в себя электрод 370, соединенный с переключателем 360 передачи/приема. Переключатель 360 передачи/приема соединен с приемником 340 тока и передатчиком 350 напряжения. Для работы этой активной электроники требуется некоторый источник питания, например, батарейный источник 310 питания или суперконденсатор. Если размер экрана достаточно маленький, чтобы сделать это практически, тогда перо также может питаться индуктивно, например, от обмотки позади или вокруг экрана. Перо 300 также может необязательно включать в себя вспомогательный канал 330 связи по описанным выше причинам.
При работе микроконтроллер 320 устанавливает последовательность процесса, где программное обеспечение в микроконтроллере 320 является ответственным по меньшей мере за поддержание восприятия времени, для вычисления координат, вычисления интерполяции и сообщения координат обратно матрице и т.д. Микроконтроллер 320 работает от некоторого внутреннего источника питания (например, батарейного источника 310 питания, суперконденсатора, аккумуляторной батареи) в пере. Микроконтроллер 320 соединен с приемником 340 тока (который может быть подобен приемнику на рядах, используемому тогда, когда выполняется измерение емкостного касания пальца) и передатчиком 350 напряжения (который может быть подобен передатчику на столбцах, используемому тогда, когда выполняется измерение емкостного касания пальца). Переключатель 360 передачи/приема может быть выполнен так, что позволяет системе мультиплексировать ток в приемнике 340 тока и напряжение в передатчике 350 напряжения на один электрод 370 в пере 300. Переключатель 360 передачи/приема может предоставлять возможность подачи выходного высокого напряжения (например, около 100 В) на электрод 370 в режиме передачи и приема сигнала малого тока (например, около 1 мкА) от электрода 370 в режиме приема.
Передатчик 350 напряжения и приемник 340 тока могут быть выполнены так, что имеют подобный вид с передатчиками и приемниками, присоединенными к столбцам и рядам в матрице, и выполняют подобное измерение. В данном случае также могут быть подходящими большинство классов схем, которые пригодны для возбуждения напряжения столбцов и измерения тока рядов для определения касания пальца на емкостном датчике. В данном случае может применяться некогерентное обнаружение, так как оно может не требовать такого точного выравнивания временной оси пера как в случае фазово-когерентного обнаружения.
Вышеупомянутое описание может предполагать, что в некоторый момент времени передает только один объект (является ли этим объектом столбец в матрице или перо). Это может представлять пример простой реализации, но в некоторых случаях может быть желательным, чтобы многочисленные объекты передавали одновременно ортогональные формы волны. Все методы, описанные выше, тем не менее работают в данном случае (например, с многочисленными ортогональными частотами или с ортогональными псевдошумовыми формами волны типа, используемого при связи многостанционного доступа с кодовым разделением каналов (CDMA)). В данном случае, может быть возможным передавать большую общую энергию на кадр, повышая отношение сигнал-шум. При такой реализации может использоваться более сложный приемник, чтобы одновременно коррелировать многочисленные ортогональные формы волны. Некоторые методы для передачи одновременно ортогональных форм волны описаны в заявке на патент США № 12/838 419, поданной 16 июля 2010 г., раскрытие которой включено путем ссылки.
Как описано выше, так как перо должно как передавать, так и принимать от единственного электрода, этот электрод может воспринимать как большие напряжения, так и малые токи. При передаче для достижения приемлемого отношения сигнал-шум в приемниках матрицы может генерироваться размах пикового напряжения около 100 В. При приеме могут различаться сигналы около микроампера. Некоторые типы переключателя или схемы передачи/приема необходимы для обеспечения этого динамического диапазона. Схема, которая достигает это, показана на фиг. 4.
Фиг. 4 изображает реализацию схемы 400 в активном пере для передачи большого напряжения и приема малого тока на единственном электроде. Схема 400 включает в себя резистор R16, соединенный с входным выводом («обратный ход») и транзистором Q2. Транзистор Q2 имеет первый вывод, соединенный с резистором R16, второй вывод, соединенный с узлом заземления, и третий вывод, соединенный с первой обмоткой трансформатора L2. Стабилитрон D2 подсоединен параллельно второму и третьему выводам транзистора Q2, соединяясь с узлом заземления и первой обмоткой трансформатора L2. Первая обмотка трансформатора L2 соединена с источником питания (например, напряжение батареи ~3 В) и третьим выводом транзистора Q2. Вторая обмотка трансформатора L2 соединена с узлом заземления и анодом диода D1. Катод диода D1 соединен с узлом TP1, где подключается электрод. Узел TP1 соединен с первым выводом транзистора Q1, первым выводом согласующего резистора Rpd и необязательно конденсатором Cextra. Согласующий резистор Rpd имеет второй вывод, соединенный с опорным напряжением VREF. Узел TP1 также включает в себя паразитные емкости, которые моделируются как единственный паразитный конденсатор Cstray на узел заземления на фиг. 4. Транзистор Q1 имеет второй вывод, соединенный с переключаемым сигналом для RX_ENABLE (разрешение приема), и третий вывод, соединенный с инвертирующим входом 2 усилителя IC1A. Неинвертирующий вход 3 усилителя IC1A соединен с опорным напряжением VREF. Выходной вывод 1 усилителя IC1A соединен с первым выводом конденсатора Cf обратной связи и резистора Rf обратной связи, и неинвертирующий вывод усилителя IC1A также соединен со вторым выводом конденсатора Cf обратной связи и резистора Rf обратной связи.
На фиг. 4 схема передачи/приема использует напряжении батареи (например, приблизительно 3 В) и генерирует высокое напряжение с ~100 В (вырабатывая десятки микроампер тока максимум), и приемник может быть помещен на этот же узел. Приемник может быть отсоединен, так что он не оказывает влияния на генерируемое высокое напряжение во время передачи, и передатчик может быть отсоединен, так что он не оказывает влияние на принимаемый сигнал во время приема. Высокое напряжение может генерироваться с использованием схемы обратного хода, подобно схеме обратного хода, используемой для возбуждения дисплея на электронно-лучевой трубке или используемой в многорежимном источнике питания. Схема обратного хода включает в себя трансформатор L2, который хранит энергию. Энергия может втекать в первую или первичную обмотку L2, храниться в виде магнитного поля в сердечнике L2 и затем вытекать из сердечника L2 через вторичную обмотку L2. Напряжение может трансформироваться в соответствии с коэффициентом трансформации трансформатора L2 и в соответствии с временными соотношениями приложенных сигналов. Энергия, вытекающая через вторичную обмотку L2, может втекать в паразитную емкость на выходе через D1 и вырабатывать высокое напряжение на этой паразитной емкости. Эта паразитная емкость может быть разработана практически минимальной, так как фактическая мощность, рассеиваемая этой схемой, по меньшей мере 0,5*Cstray*V^2*f, может быть пропорциональной этой емкости.
При передаче высокое напряжение AC генерируется посредством трансформатора L2 обратного хода. Чтобы получить напряжение возбуждения с частотой f=1/T, и предполагая, что рабочий цикл переключателя 50%, переключатель Q2 замкнут в течение времени 0,5*T. В течение этого времени ток в трансформаторе, начиная с нуля, изменяется по линейному закону до первичного тока Ipri=(Vdd*0,5*T)/Lpri, где Vdd представляет собой напряжение питания, обычно около 3 В, и Lpri представляет собой индуктивность первичной обмотки. Когда переключатель размыкается, эта сохраненная энергия подается на паразитную емкость Cstray на выходе схемы обратного хода. Пренебрегая резистором Rpd, пиковое напряжение может быть вычислено приравниванием энергии, хранимой в индуктивности трансформатора, 0,5*Lpri*Ipri^2, энергии, хранимой в паразитной емкости выхода, 0,5*Cstray*Vpk^2. Напряжение может затухать экспоненциально как Rpd*Cstray, где это произведение должно быть выбрано этого же порядка, что и период возбуждения, так что выходной сигнал затухает грубо обратно до нуля каждый цикл. На практике, Cstray может представлять собой емкость в пикофарадах, например, и Rpd может быть в сотнях килоом. Индуктивность первичной обмотки трансформатора может быть в сотнях микрогенри, и его коэффициент трансформации может быть около 1:7. Резистор Rpd может быть заменен переключателем на заземление (например, полевой транзистор (FFT) или биполярный транзистор). Он может создавать приблизительно прямоугольную волну, которая ближе к требуемой идеальной синусоидальной волне, чем многократные экспоненциальные функции, создаваемые резистором.
Когда высокое напряжение прикладывается к электроду, приемник в IC1A может быть защищен от разрушения размыканием переключателя Q1 (например, транзистора) для изолирования приемника в режиме передачи. В противном случае, схема IC1A приемника будет фиксировать высокое напряжение передачи и, возможно, будет разрушаться им. Эта схема, поэтому, размыкается, используя транзистор n-FET (полевой транзистор с n-каналом) Q1. Этот n-FET может быть выбран для высокого максимального допустимого напряжения (т.е. максимальное допустимое напряжение больше пикового напряжения, наблюдаемого на электроде) и для низкой паразитной емкости (которая будет увеличивать Cstray, и, поэтому, уменьшать допустимое Rpd и увеличивать общую потребляемую мощность системы при передаче). Этот транзистор Q1 представляет собой дискретный FET и, поэтому, может иметь его узел корпуса, соединенный с его узлом истока, который создает паразитный диод; но этот диод всегда смещен в обратном направлении, так как напряжение на стоке всегда больше напряжения на истоке, что может означать, что оно не оказывает влияние на работу схемы. При передаче напряжение затвора Q1 удерживается на 0 В, которое подает напряжение -VREF (с VREF около 0,5*Vdd) на затвор, которое переводит транзистор в выключенное состояние. При приеме напряжение Vdd прикладывается к затвору Q1. Оно может подать напряжение (Vdd - VREF) на затвор, которое переводит транзистор в включенное состояние. Сигнал, поэтому, может втекать в приемный трансимпедансный усилитель IC1A. По существу, в режиме приемника высокое напряжение может быть подано на затвор Q1 (например, вывод RX_ENABLE (разрешение приема)), так что транзистор Q1 является проводящим и ведет себя подобно короткому замыканию. Паразитные емкости, однако, из-за этого транзистора и из-за диода D1 не могут отключаться. В первом порядке, дополнительные импедансы на заземление на инвертирующем входе IC1A не будут оказывать влияние на передаточную функцию замкнутой цепи; но для практического усилителя с конечным произведением коэффициента усиления на ширину полосы пропускания, это может быть не так. Емкость Cstray не оказывает существенного влияния на передаточную характеристику замкнутой цепи приемного усилителя. Rpd не имеет существенного динамического эффекта; он вводил бы существенную ошибку по постоянному току (DC), если бы был соединен с заземлением, но он соединен с этим же VREF, что и неинвертирующий вход операционного усилителя, чтобы избежать этой проблемы.
Индуктивность вторичной обмотки трансформатора вводила бы существенную ошибку, но при приеме напряжение на аноде L2 удерживается близко к заземлению трансформатором, и напряжение на катоде поддерживается на VREF>0. Это означает, что диод смещен в обратном направлении, что означает, что он изолирует схему приема от этой индуктивности трансформатора. Этот же диод, поэтому, используется как часть схемы обратного хода, разрешая только однонаправленный ток от вторичной обмотки трансформатора в выходную емкость, и изолируя приемник от этой схемы обратного хода, уменьшая число деталей.
В некоторых реализациях может быть изменение паразитной емкости Cstray 2:1 или более, что может создать изменение пикового генерируемого напряжения. Поэтому могут быть сделаны разработки схемы с достаточно высоким напряжением для достижения требуемого отношения сигнал-шум с наибольшей возможной емкостью Cstray без генерирования достаточно высокого напряжения, вызывающего разрушение транзистора, даже с наименьшей возможной Cstray. В некоторых реализациях заранее заданная емкость (например, Cextra на фиг. 4) может быть добавлена параллельно паразитной емкости Cstray. Если допустимое отклонение на эту заранее заданную емкость меньше допустимого отклонения паразитной емкости, тогда это имеет эффект уменьшения изменения пикового напряжения, но увеличение суммарной емкости и, поэтому, увеличение суммарной потребляемой мощности. В некоторых реализациях вместо использования схемы обратного хода может использоваться другая топология многорежимного источника питания.
Фиг. 5 изображает чертеж с примером выходного напряжения усилителя 510 приемника в зависимости от времени 520. Входной сигнал представляет собой входную прямоугольную волну с напряжением 200 В двойной амплитуды, подаваемую на приемник через емкость 100 фФ. Для этого примера Rpd составляет 100 кОм, Cstray равна 7 пФ, Cf равна 10 пФ, и Rf равно 200 кОм. Пиковое напряжение 535 для формы 530 волны выходного напряжения составляет около 1,6 В, и наименьшее напряжение 540 для формы 530 волны выходного напряжения составляет около -1,6 В.
Фиг. 6 изображает чертеж с примером выходного напряжения передатчика 610 в зависимости от времени 620. Входное напряжение составляет 3 В, Cstray равна 7 пФ, Rpd равно 100 кОм, Lpri (индуктивность первой обмотки трансформатора L2) составляет 200 мкГн, Lsec (индуктивность второй обмотки трансформатора L2) составляет 10 мГн, и трансформатор L2, поэтому, имеет коэффициент трансформации приблизительно 1:7. Наибольшее значение 635 формы 630 волны выходного напряжения составляет около 140 В, и наименьшее напряжение 645 составляет около 10 В.
Некоторые из описанных вариантов осуществления предмета изобретения и операции могут быть реализованы цифровыми электронными схемами или компьютерным программным обеспечением, аппаратно-программным обеспечением или аппаратным обеспечением, включая конструкции, описанные в данном описании изобретения и его конструктивных эквивалентах, или в комбинации одного или более из них. Варианты осуществления предмета изобретения, описанного в данном описании изобретения, могут быть реализованы в виде одной или более компьютерных программ, т.е. одного или более модулей инструкций компьютерной программы, кодированных на носителе данных компьютера для исполнения устройством обработки данных или для управления работой его. Альтернативно или в дополнение, инструкции программы могут кодироваться на искусственно генерируемом распространяемом сигнале, например, генерируемого машиной электрического, оптического или электромагнитного сигнала, который генерируется для кодирования информации для передачи на подходящее устройство приемника для исполнения устройством обработки данных. Устройство обработки данных может включать в себя датчик, может быть частью датчика, может быть частью системы с датчиком, может быть интегрировано в систему и/или датчик, может быть частью приемников, передатчиков, компонентов и/или логики, ассоциированной с датчиком или приемниками и/или передатчиками, или любую их комбинацию. Носителем данных компьютера может быть, или может включаться в, считываемое компьютером запоминающее устройство, считываемая компьютером запоминающая подложка, матрица или устройство памяти с произвольным или последовательным доступом, или комбинация одного или более из них. Кроме того, хотя носитель данных компьютера не является распространяемым сигналом, носитель данных компьютера может представлять собой источник или пункт назначения инструкций компьютерной программы, кодированных в искусственно генерируемом распространяемым сигнале. Носитель данных компьютера также может представлять собой, или включаться в, один или более отдельных физических компонентов или носителей (например, многочисленные компакт-диски (CD), диски или другие запоминающие устройства).
Операции, описанные в данном описании изобретения, могут быть реализованы в виде операций, выполняемых устройством обработки данных над данными, хранимыми на одном или более считываемых компьютером запоминающих устройствах или принимаемыми от других источников.
Различные устройства, приборы и машины для обработки данных могут использоваться в качестве «устройства обработки данных», включая, в качестве примера, программируемый процессор, компьютер, систему на кристалле или многочисленные вышеупомянутые, или комбинации вышеупомянутых. Устройство может включать в себя логические схемы специального назначения, например, программируемую вентильную матрицу (FPGA) или специализированную интегральную схему (ASIC). Устройство также может включать в себя, в дополнение к аппаратным средствам, код, который создает среду исполнения для рассматриваемой компьютерной программы, например, код, который составляет программно-аппаратное обеспечение процессора, стек протоколов, систему управления базой данных, операционную систему, межплатформную среду выполнения, виртуальную машину или комбинацию одного или более из них. Устройство и среда исполнения могут реализовать различные разные инфраструктуры модели вычислений, такие как веб-услуги, распределенные инфраструктуры вычислений и сетевых вычислений.
Компьютерная программа (также известная как программа, программное обеспечение, программное приложение, сценарий или код) может быть написана на языке программирования любого вида, включая компилируемые или интерпретируемые языки, декларативные или процедурные языки, и она может применяться в любом виде, включая в виде автономной программы или в виде модуля, компонента, подпрограммы, объекта или другого блока, пригодного для использования в вычислительной среде. Компьютерная программа может, но в этом нет необходимости, соответствовать файлу в файловой системе. Программа может храниться в части файла, который содержит другие программы или данные (например, один или более сценариев, хранимых в документе языка разметки), в единственном файле, назначенном рассматриваемой программе, или в многочисленных скоординированных файлах (например, файлах, которые хранят один или более модулей, подпрограмм или частей кода). Компьютерная программа может применяться для исполнения на одном компьютере или на многочисленных компьютерах, которые расположены в одном месте или распределены по многочисленным местам и связаны между собой сетью связи.
Процессы и логические потоки, описанные в данном описании изобретения, могут выполняться одним или более программируемыми процессорами, исполняющими одну или более компьютерных программ для выполнения действий посредством произведения операций над введенными данными и генерирования выходного результата. Процессы и логические потоки также могут выполняться логическими схемами специального назначения, и устройство также может быть реализовано на них, например, на программируемой вентильной матрице (FPGA) или специализированной интегральной схеме (ASIC).
Процессоры, пригодные для исполнения компьютерной программы, включают в себя, в качестве примера, микропроцессоры как общего, так и специального назначения и любой один или более процессоров любого вида цифрового компьютера. Как правило, процессор принимает инструкции и данные от постоянной памяти или памяти произвольного доступа, или от обоих. Существенными элементами компьютера являются процессор для выполнения действий в соответствии с инструкциями и одно или более устройств памяти для хранения инструкций и данных. Как правило, компьютер также включает в себя, или функционально соединен для приема данных от или пересылки данных на, или в обоих случаях, одно или более массовых запоминающих устройств для хранения данных, например, магнитные, магнитооптические диски или оптические диски. Однако компьютеру нет необходимости иметь такие устройства. Кроме того, компьютер может быть воплощен в другом устройстве, например, мобильном телефоне, персональном цифровом помощнике (PDA), мобильном аудио- или видеоплеере, игровой консоли или портативном запоминающем устройстве (например, флеш-накопителе универсальной последовательной шины (USB)), помимо прочего. Устройства, пригодные для хранения инструкций компьютерной программы и данных включают в себя все виды энергонезависимой памяти, носителей и устройств памяти, включающих в себя, в качестве примера, устройства полупроводниковой памяти, например, стираемое программируемое постоянное запоминающее устройство (EPROM), электрически стираемое программируемое постоянное запоминающее устройство (EEPROM) и устройства флеш-памяти; магнитные диски, например, внутренние жесткие диски или съемные диски; магнитооптические диски; и компакт-диски только для чтения (CD-ROM) и цифровые многофункциональные диски только для чтения (DVD-ROM). Процессор и память могут быть дополнены логическими схемами специального назначения или могут быть встроены в них.
Чтобы обеспечить взаимодействие с пользователем, варианты осуществления предмета изобретения, описанного в данном описании изобретения, могут быть реализованы на компьютере, имеющем устройство отображения, например, монитор на электронно-лучевой трубке (CRT) или жидкокристаллический (LCD) монитор, для отображения информации пользователю, и клавиатуру и указательное устройство, например, мышь или трекбол, посредством которых пользователь может обеспечивать ввод в компьютер. Также могут использоваться другие виды устройств для обеспечения взаимодействия с пользователем; например, обратная связь, обеспечиваемая с пользователем, может быть любого вида сенсорной обратной связи, например, визуальная обратная связь, слуховая обратная связь или тактильная обратная связь; и ввод от пользователя может приниматься в любом виде, включая акустический, речевой или тактильный ввод. Палец человека, например, может взаимодействовать с сенсорным экраном для оказания влияния на величину «недвижимости» экрана. Кроме того, компьютер может взаимодействовать с пользователем посредством посылки документов и приема документов от устройства, которое используется пользователем; например, посредством посылки веб-страниц на веб-браузер на клиентском устройстве пользователя в ответ на запросы, принимаемые от веб-браузера.
Хотя данное описание изобретения содержит многочисленные подробности конкретных реализаций, они не должны толковаться как ограничения на объем любых изобретений или того, что может заявляться, но скорее как описания признаков, характерных для конкретных вариантов осуществления конкретных изобретений. Некоторые признаки, которые описываются в данном описании изобретения в контексте отдельных вариантов осуществления, также могут быть реализованы в комбинации в единственном варианте осуществления. И наоборот, различные признаки, которые описаны в контексте единственного варианта осуществления, также могут быть реализованы отдельно в многочисленных вариантах осуществления или в любой подходящей субкомбинации. Кроме того, хотя признаки могут описываться выше как действующие в некоторых комбинациях и даже первоначально заявленные как таковые, один или более признаков из заявленной комбинации в некоторых случаях могут исключаться из комбинации, и заявленная комбинация может относиться к субкомбинации или разновидности субкомбинации.
Аналогично, хотя операции описаны на чертежах в определенном порядке, это не должно пониматься как требующее того, чтобы такие операции выполнялись в показанном конкретном порядке или в последовательном порядке, или чтобы все изображенные операции выполнялись, для достижения требуемых результатов. При некоторых обстоятельствах может быть полезной многозадачная и параллельная обработка. Кроме того, разделение различных системных компонентов в вариантах осуществления, описанных выше, не должно пониматься как требующее такого разделения во всех вариантах осуществления, и необходимо понять, что описанные программные компоненты и системы, в основном, могут интегрироваться вместе в единственный программный продукт или упаковываться в многочисленные программные продукты.
Таким образом, были описаны конкретные варианты осуществления предмета изобретения. Другие варианты осуществления находятся в пределах объема нижеследующей формулы изобретения. В некоторых случаях, действия, изложенные в формуле изобретения, могут выполняться в другом порядке и все же могут достигать требуемых результатов. Кроме того, процессы, описанные на прилагаемых фигурах, не требуют обязательно конкретного показанного порядка, или последовательного порядка, для достижения требуемых результатов. В некоторых реализациях может быть полезной многозадачная и параллельная обработка.

Изобретение относится к области устройств ввода информации и может быть использовано при определении положения электростатического пера в пределах емкостного датчика касания. Описаны системы для передачи и приема сигналов в активном пере для емкостного датчика касания, для которого системы имеют по меньшей мере одну схему для приема тока от электрода и для передачи напряжения на электрод. Системы включают в себя компоненты для приема тока в режиме приема, переключатель и схему многорежимного источника питания, имеющую по меньшей мере трансформатор и диод, для которой диод соединен с трансформатором. В режиме передачи имеется средство для электрического изолирования по меньшей мере некоторых из компонентов, выполненных с возможностью приема тока в режиме приема, от напряжения, образуемого на паразитной емкости. В режиме приема имеется средство для электрического изолирования по меньшей мере некоторых из компонентов, выполненных с возможностью приема тока в режиме приема, от индуктивности трансформатора в схеме многорежимного источника питания. Технический результат - повышение точности определения положения электростатического пера в пределах емкостного датчика касания. 4 н. и 20 з.п. ф-лы, 6 ил.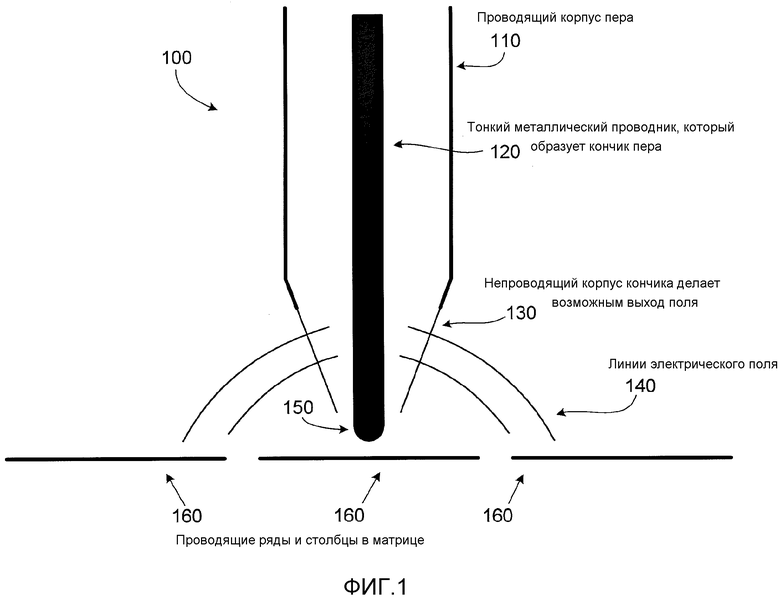
1. Способ для передачи и приема сигналов в активном пере для емкостного датчика касания, в котором активное перо содержит электрод и по меньшей мере одну схему для приема тока через электрод и для передачи напряжения на электрод, причем способ содержит:
в режиме передачи, выполнение схемы с возможностью передачи напряжения через узел, соединенный с электродом, посредством:
генерирования напряжения, используя схему многорежимного источника питания, причем схема многорежимного источника питания содержит по меньшей мере катушку индуктивности и диод, причем диод соединен с трансформатором,
предоставления возможности диоду периодически смещаться в прямом направлении в режиме передачи, и току протекать через диод в паразитную емкость, и
выполнение переключателя в режиме передачи с возможностью электрического изолирования по меньшей мере некоторых из компонентов в схеме, выполненной с возможностью приема тока в режиме приема, от напряжения, образуемого на паразитной емкости; и
в режиме приема, выполнение схемы с возможностью приема тока через узел, соединенный с электродом, посредством:
выполнения переключателя с возможностью приема тока в компоненты в схеме, выполненной с возможностью приема тока в режиме приема, и
выполнение диода с возможностью смещения его в обратном направлении в режиме приема, так что по меньшей мере некоторые из компонентов в схеме, выполненной с возможностью приема тока в режиме приема, электрически изолируются от индуктивности трансформатора в схеме многорежимного источника питания.
2. Способ по п. 1, в котором резистор соединен с диодом, причем способ дополнительно содержит обеспечение опорного напряжения на по меньшей мере одном выводе резистора, которое больше напряжения заземления схемы.
3. Способ по п. 1, дополнительно содержащий в режиме приема посылку по меньшей мере части принятого тока в схему приемника тока, в котором схема приемника тока управляется микроконтроллером.
4. Способ по п. 1, в котором выполнение с возможностью содержит выполнение переключателя в режиме передачи с возможностью электрического изолирования по меньшей мере некоторых из компонентов в схеме, выполненной с возможностью приема тока в режиме приема, от напряжения, образуемого на паразитной емкости, связанной с одним или более компонентами в узле, соединенном с электродом.
5. Способ по п. 4, дополнительно содержащий размещение второй заранее заданной емкости параллельно паразитной емкости в узле, соединенном с электродом.
6. Способ по п. 5, дополнительно содержащий прием тока порядка одного микроампера и передачу напряжения порядка ста вольт.
7. Способ по п. 1, в котором схема многорежимного источника питания содержит схему обратного хода.
8. Устройство для передачи и приема сигналов в активном пере для емкостного датчика касания, причем устройство имеет по меньшей мере одну схему для приема тока от электрода и для передачи напряжения на электрод, при этом упомянутое устройство содержит:
электрод;
компоненты, выполненные с возможностью приема тока в режиме приема;
схему многорежимного источника питания, содержащую по меньшей мере трансформатор и диод, в которой диод соединен с трансформатором;
переключатель; и
в котором:
в режиме передачи, схема для передачи напряжения на электрод выполнена с возможностью:
генерирования напряжения, используя схему многорежимного источника питания,
выполнения диода с возможностью периодического смещения в прямом направлении в режиме передачи, и протекания тока через диод в паразитную емкость, и
выполнения переключателя в режиме передачи с возможностью электрического изолирования по меньшей мере некоторых из компонентов, выполненных с возможностью приема тока в режиме приема, от напряжения, образуемого на паразитной емкости; и
в режиме приема, схема для приема тока от электрода выполнена с возможностью:
выполнения переключателя с возможностью приема тока в компоненты, выполненные с возможностью приема тока в режиме приема, и
выполнения диода с возможностью смещения в обратном направлении в режиме приема, так что по меньшей мере некоторые из компонентов, выполненные с возможностью приема тока в режиме приема, электрически изолируются от индуктивности трансформатора в схеме многорежимного источника питания.
9. Устройство по п. 8, в котором схема многорежимного источника питания содержит схему обратного хода.
10. Устройство по п. 8, дополнительно содержащее резистор, в котором резистор соединен с диодом, причем схема выполнена с возможностью подачи опорного напряжения на по меньшей мере один вывод резистора, которое больше напряжения заземления схемы.
11. Устройство по п. 8, в котором схема выполнена с возможностью посылки в режиме приема по меньшей мере части принятого тока в схему приемника тока, причем схема приемника тока управляется микроконтроллером.
12. Устройство по п. 8, в котором паразитная емкость содержит паразитную емкость, связанную с одним или более компонентами в узле, соединенном с электродом.
13. Устройство по п. 8, дополнительно содержащее вторую заранее заданную емкость, которая располагается параллельно паразитной емкости в узле, соединенном с электродом.
14. Устройство по п. 8, в котором принятый ток составляет порядка одного микроампера, и в котором передаваемое напряжение составляет порядка ста вольт.
15. Система для передачи и приема сигналов в активном пере для емкостного датчика касания, причем упомянутая система имеет по меньшей мере одну схему для приема тока от электрода и для передачи напряжения на электрод, причем упомянутая система содержит:
электрод;
компоненты, выполненные с возможностью приема тока в режиме приема;
схему многорежимного источника питания, содержащую по меньшей мере трансформатор и диод, причем диод соединен с трансформатором;
переключатель; и
в которой:
в режиме передачи схема для передачи напряжения на электрод выполнена с возможностью:
генерирования напряжения, используя схему многорежимного источника питания,
выполнения диода с возможностью периодического смещения его в прямом направлении в режиме передачи, и протекания тока через диод в паразитную емкость, и
средство для электрического изолирования по меньшей мере некоторых из компонентов, выполненных с возможностью приема тока в режиме приема, от напряжения, образуемого на паразитной емкости; и
в режиме приема, схема для приема тока от электрода выполнена с возможностью:
выполнения переключателя с возможностью приема тока в компоненты, выполненные с возможностью приема тока в режиме приема, и
средство для электрического изолирования по меньшей мере некоторых из компонентов, выполненных с возможностью приема тока в режиме приема, от индуктивности трансформатора в схеме многорежимного источника питания.
16. Система по п. 15, в которой схема многорежимного источника питания содержит схему обратного хода.
17. Система по п. 15, дополнительно содержащая резистор, в которой резистор соединен с диодом, в которой схема содержит средство для подачи опорного напряжения на по меньшей мере один вывод резистора, которое больше напряжения заземления схемы.
18. Система по п. 15, в которой схема содержит средство для посылки в режиме приема по меньшей мере части принятого тока в схему приемника тока, причем схема приемника тока управляется микроконтроллером.
19. Система по п. 15, в которой паразитная емкость содержит паразитную емкость, связанную с одним или более компонентами в узле, соединенном с электродом.
20. Система по п. 15, дополнительно содержащая вторую заранее заданную емкость, которая располагается параллельно паразитной емкости в узле, соединенном с электродом.
21. Система по п. 15, в которой принятый ток составляет порядка одного микроампера, и в которой передаваемое напряжение составляет порядка ста вольт.
22. Схема для передачи и приема сигналов с электродом в активном пере, причем упомянутая схема содержит:
первый, второй и третий резисторы;
первый и второй транзисторы;
трансформатор;
первый диод;
усилитель; и
конденсатор;
в которой:
первый резистор соединен с входным выводом и первым транзистором;
первый транзистор содержит первый вывод, соединенный с резистором, второй вывод, соединенный с узлом заземления, третий вывод, соединенный с первой обмоткой трансформатора;
трансформатор имеет первую обмотку, подсоединенную между выводом для источника питания и третьим выводом первого транзистора, и вторую обмотку, подсоединенную между узлом заземления и анодом первого диода;
первый диод имеет катод, соединенный с узлом, который соединен с электродом, выполненным с возможностью приема и передачи сигналов емкостным датчиком касания;
второй резистор подсоединен между узлом, который соединен с электродом, и опорным напряжением;
второй транзистор содержит первый вывод, соединенный с узлом, соединенным с электродом, второй вывод, соединенный с выводом для переключаемого сигнала, и третий вывод, соединенный с инвертирующим входом усилителя;
усилитель имеет неинвертирующий вход, который соединен с опорным напряжением;
третий резистор подсоединен между инвертирующим входом усилителя и выходом усилителя; и
конденсатор подсоединен между инвертирующим входом усилителя и выходом усилителя;
причем опорное напряжение выполнено большим, чем напряжение узла заземления, и меньшим, чем напряжение источника питания,
причем схема выполнена так, что имеет режим приема для приема тока через узел, соединенный с электродом, и режим передачи для передачи напряжения через узел, соединенный с электродом,
причем в режиме приема первый диод выполнен с возможностью смещения в обратном направлении, и второй транзистор выполнен с возможностью электрического соединения первого и третьего выводов второго транзистора, и
причем в режиме передачи первый диод выполнен с возможностью периодического смещения в прямом направлении, и второй транзистор выполнен с возможностью образования разомкнутой цепи для электрического разъединения первого и третьего выводов второго транзистора.
23. Схема по п. 22, в которой принятый ток составляет порядка одного микроампера, и в которой передаваемое напряжение составляет порядка ста вольт.
24. Схема по п. 22, дополнительно содержащая второй диод, причем второй диод подсоединен параллельно второму и третьему выводам первого транзистора.

