ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к методикам и реализациям цифровой обработки сигналов (DSP) для улучшения отношения сигнал/шум (ОСШ) емкостных датчиков прикосновения.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
В некоторых датчиках прикосновения местоположение пальца пользователя в пределах двумерной поверхности может определяться с помощью выполнения измерений емкости. Палец пользователя может быть в некоторой степени проводящим, и пользователь может иметь некоторое соединение с «землей» схемы датчика прикосновения так, что палец пользователя имеет влияние на емкость между электродами в датчике прикосновения.
СУЩНОСТЬ ИЗОБРТЕНИЯ
Данное описание описывает технологии, в общем случае относящиеся к датчикам прикосновения, использующим методики DSP для увеличения ОСШ (SNR).
В общем случае некоторые аспекты объекта изобретения, описанного в данном описании, могут воплощаться в способах, которые предусматривают датчик. Другие варианты осуществления этого аспекта включают в себя соответствующие системы, устройство и компьютерные программы, сконфигурированные для выполнения действий способов, закодированных на компьютерных запоминающих устройствах.
В общем случае другой аспект объекта изобретения, описанного в данном описании, может воплощаться в способах, которые включают в себя действия, относящиеся к устройству обработки данных, связанному с датчиком, имеющим входной интерфейс, по меньшей мере одну соединительную линию, по меньшей мере один передатчик, соединенный и с входным интерфейсом, и с первым местоположением по меньшей мере на одной из соединительных линий, и приемник, соединенный со вторым местоположением по меньшей мере на одной соединительной линии. Способ предусматривает осуществление доступа к сигналу во входном интерфейсе датчика, передачу сигнала, к которому осуществлен доступ, от передатчика к первому местоположению по меньшей мере на одной из соединительных линий датчика для обеспечения передачи сигнала, к которому осуществлен доступ, по соединительной линии, соответствующей первому местоположению, к которому передают сигнал, к которому осуществлен доступ, и прием в приемнике датчика и от соединительной линии через приемник, соединенный со вторым местоположением соединительной линии датчика, выбранного и переданного сигнала. Способ предусматривает осуществление доступа к расстоянию между первым местоположением передатчика и вторым местоположением приемника по соединительной линии, используемой для передачи сигнала, к которому осуществлен доступ, определение, основываясь на расстоянии, к которому осуществлен доступ, преобразования, которому переданный сигнал, как ожидают, подвергнется на основе данной передачи, в качестве функции от расстояния между первым и вторым местоположениями, и генерацию сигнала ожидаемой корреляции, основываясь на определенном преобразовании. Способ включает в себя прием сигнала ожидаемой корреляции в приемнике датчика, и основываясь на принятом сигнале ожидаемой корреляции, идентификацию информации, которая может использоваться по меньшей мере для частичной компенсации преобразования, которому переданный сигнал, как ожидают, подвергнется на основе данной передачи. Способ включает в себя компенсацию с помощью применения принятого сигнала ожидаемой корреляции по отношению к меньшей части преобразования, которому переданный сигнал, как ожидают, подвергнется на основе данной передачи.
Каждый из этих и других вариантов осуществления может необязательно включать в себя одну или большее количество следующих особенностей. Сигнал ожидаемой корреляции может соответствовать информации корреляции, которая соответствует аналоговому сигналу и/или цифровым данным. Преобразование может включать в себя сдвиг по фазе. Преобразование может также включать в себя ослабление, задержку и/или воздействие линейной фильтрации. Преобразование может применяться к синусоидальному колебательному сигналу для сигнала ожидаемой корреляции или к несинусоидальному колебательному сигналу для сигнала ожидаемой корреляции. Компенсация может предусматривать вычисление произведения колебательного сигнала принятого переданного сигнала с колебательным сигналом сигнала ожидаемой корреляции за период интеграции, и вычисление интеграла этого произведения. Способ может включать в себя обеспечение вычисления на выходе приемника. Датчик может иметь соединительные линии в матричной конфигурации. Способ может включать в себя моделирование преобразования принятого переданного сигнала в качестве функции от расстояния между передатчиком и приемником в матричной конфигурации. Способ может предусматривать моделирование преобразования с помощью моделирования по меньшей мере одной соединительной линии, как имеющей сопротивление и емкость, распределенные по расстоянию между первым и вторым местоположениями. Для определения преобразования, которому переданный сигнал, как ожидают, подвергнется, способ может предусматривать измерение набора преобразований по расстоянию между первым и вторым местоположениями и выбор одного из преобразований в наборе преобразований, которое аппроксимирует преобразование, которому переданный сигнал, как ожидают, подвергнется, данное преобразование может включать в себя сдвиг по фазе, и набор преобразований содержит набор сдвигов по фазе. Преобразование, которому переданный сигнал, как ожидают, подвергнется, может включать в себя измерение соответствующего сдвига по фазе по соответствующим местоположениям по меньшей мере по одной соединительной линии, выбор одного из измеренных сдвигов по фазе, основываясь на соответствии расстояния, относящегося к одному из измеренных сдвигов по фазе, расстоянию между первым и вторым местоположениями, и назначение выбранного измеренного сдвига по фазе в качестве сдвига по фазе, которому переданный сигнал, как ожидают, подвергнется. Для определения преобразования, которому переданный сигнал, как ожидают, подвергнется, способ может включать в себя измерение соответствующего сдвига по фазе по соответствующим местоположениям по меньшей мере по одной соединительной линии, использование линейной интерполяции измеренных сдвигов по фазе для аппроксимации сдвига по фазе, которому переданный сигнал, как ожидают, подвергнется во втором местоположении в приемнике, и назначение интерполированного сдвига по фазе в качестве сдвига по фазе, которому переданный сигнал, как ожидают, подвергнется. Для определения преобразования, которому переданный сигнал, как ожидают, подвергнется, способ может предусматривать корреляцию с синфазной версией и квадратурной версией колебательного сигнала переданного сигнала, и вычисление сдвига по фазе, которому переданный сигнал, как ожидают, подвергнется, с помощью вычисления функции арктангенса синфазного и квадратурного колебательных сигналов. Датчик может иметь соединительные линии в матричной конфигурации, причем передача может предусматривать возбуждение датчика с помощью переданного сигнала на двух краях матрицы для уменьшения постоянной времени резистивно-емкостной цепи в два раза по сравнению с постоянной времени, полученной при возбуждении датчика с помощью переданного сигнала на одном краю. Передача может предусматривать возбуждение датчика с помощью переданного сигнала на множестве краев матрицы для уменьшения постоянной времени резистивно-емкостной цепи по сравнению с постоянной времени, полученной при возбуждении датчика с помощью переданного сигнала на одном краю. Количество краев может быть равно четырем, в этом случае постоянная времени резистивно-емкостной цепи может быть уменьшена в четыре раза по сравнению с постоянной времени, полученной при возбуждении датчика с помощью переданного колебательного сигнала на одном краю. Датчик может иметь соединительные линии, сформированные в матричной конфигурации со строками и столбцами, для которых по меньшей мере одна соединительная линия по меньшей мере в одной из строк или по меньшей мере в одном из столбцов разрезана для формирования двух соединительных линий, которые имеют приблизительно половину длины одной соединительной линии, и разрезанная соединительная линия формирует первую секцию соединительной линии, соответствующую первой части разрезанной соединительной линии, и вторую секцию соединительной линии, соответствующую второй части разрезанной соединительной линии. Постоянная времени резистивно-емкостной цепи или для первой, или для второй разрезанных соединительных линий может быть функцией длины первой или второй соединительных линий. Датчик может быть емкостным датчиком прикосновения.
В общем случае другой аспект объекта изобретения, описанного в данном описании, может воплощаться в способах, которые включают в себя действия, относящиеся к устройству обработки данных, связанному с датчиком, для которых данный датчик включает в себя соединительные линии, ориентированные в матричной конфигурации, входной интерфейс, передатчики, соединенные с входным интерфейсом, и приемники. Соответствующие передатчики соответствуют и соединены с первым местоположением соответствующих соединительных линий, и соответствующие приемники соединены со вторым местоположением соответствующих соединительных линий. Способ предусматривает определение ортогональных колебательных сигналов возбуждения, имеющих ортогональную последовательность колебательных сигналов, причем ортогональные колебательные сигналы возбуждения ортогональны друг другу, и одновременную передачу на каждом по меньшей мере из двух передатчиков одного из ортогональных колебательных сигналов возбуждения таким образом, что по меньшей мере два передатчика сконфигурированы для передачи соответствующих ортогональных последовательностей колебательных сигналов, причем передача происходит меньше чем на всех передатчиках в датчике. Способ предусматривает прием по меньшей мере двух из ортогональных колебательных сигналов возбуждения по меньшей мере на двух из приемников, для которых каждый по меньшей мере из двух ортогональных колебательных сигналов возбуждения принимают на одном из соответствующих приемников. Способ включает в себя прием информации по меньшей мере для ожидаемого принятого колебательного сигнала, и для каждого по меньшей мере из двух приемников - выполнение корреляции принятого колебательного сигнала возбуждения с ожидаемым принятым колебательным сигналом.
Каждый из этих и других вариантов осуществления может необязательно включать в себя одну или большее количество следующих особенностей. Датчик может включать в себя емкостный датчик прикосновения. Ортогональные колебательные сигналы возбуждения ортогональны к шуму в датчике. Матричная конфигурация может включать в себя n столбцов соединительных линий, и каждая одновременная передача передатчиков может происходить в течение временного интервала интеграции. Способ может предусматривать определение некоторого числа временных интервалов интеграции в качестве функции от некоторого числа одновременных передач по меньшей мере от двух из передатчиков. Способ может предусматривать идентификацию частоты, связанной с шумом в датчике, и выбор по меньшей мере одного из ортогональных колебательных сигналов возбуждения так, чтобы он был ортогонален к частоте, связанной с шумом. Датчик может быть сконфигурирован так, чтобы он был расположен физически близко к жидкокристаллическому устройству отображения, чтобы он по меньшей мере имел возможность взаимодействовать с жидкокристаллическим устройством отображения. Жидкокристаллическое устройство отображения может иметь частоту строчной развертки, которая составляет приблизительно от 30 кГц до 135 кГц. Способ может предусматривать выполнение мультиплексирования с кодовым разделением, причем каждая соединительная линия в группе из четырех соединительных линий содержит отличающийся код для ортогональных последовательностей колебательных сигналов. Мультиплексирование с кодовым разделением может быть закодированной с помощью манчестерского кода последовательностью Адамара. Способ определения ортогональных колебательных сигналов возбуждения может предусматривать выбор первой частоты для модуляции, генерацию псевдошумовой последовательности около первой частоты, генерацию несущего сигнала для псевдошумовой последовательности и модуляцию некоторого числа циклов несущего сигнала около первой частоты с псевдошумовой последовательностью. Первая частота может составлять приблизительно 100 кГц. Число несущих сигналов может быть меньше десяти. Способ может предусматривать идентификацию частоты, связанной с идентифицированным шумом, и выбор по меньшей мере одного из ортогональных колебательных сигналов возбуждения так, чтобы он был ортогонален к частоте, связанной с идентифицированным шумом. Определенные ортогональные колебательные сигналы возбуждения могут быть функцией и частоты для модуляции, и псевдошумовой последовательности на частоте для модуляции. Способ может предусматривать получение спектра шума, связанного с датчиком, проведение измерения шума в датчике с помощью оценки спектра шума, связанного с датчиком, идентификацию шума, основываясь на оценке спектра шума, и определение ортогональных колебательных сигналов возбуждения, делая ортогональные колебательные сигналы возбуждения ортогональными к идентифицированному шуму в датчике. Способ может предусматривать получение спектра шума, связанного с датчиком, проведение измерения шума с помощью оценки спектра шума, связанного с датчиком, и выполнение идентификации шума, основываясь на измерении шума. Способ может предусматривать продолжение проведения измерения для идентификации шума, который ортогонален к ортогональным колебательным сигналам возбуждения, посредством идентификации шума из источника наибольшего шума в спектре шума за период времени и адаптивное определение ортогональных колебательных сигналов возбуждения посредством использования шума, связанного с источником наибольшего шума, который непрерывно идентифицируют в спектре шума. Способ может предусматривать периодическое проведение измерения для идентификации шума, который ортогонален к ортогональным колебательным сигналам возбуждения, посредством идентификации шума из источника наибольшего шума в спектре шума и адаптивное определение ортогональных колебательных сигналов возбуждения посредством использования шума, связанного с источником наибольшего шума, который периодически идентифицируется в спектре шума. Идентифицированный шум может быть связан с рабочей частотой флуоресцентной лампы подсветки с холодным катодом или с частотой, связанной с жидкокристаллическим устройством отображения.
Датчик может быть емкостным датчиком прикосновения. Емкостной датчик прикосновения может иметь входную схему. Способ может включать в себя подготовку входного напряжения для передачи на выходе входной схемы для емкостного датчика прикосновения, причем входная схема может включать в себя по меньшей мере двухкаскадную схему с первым каскадом, сконфигурированным для создания трансимпендансного усиления, и второй каскад может быть сконфигурирован для создания усиления по напряжению. Подготовка входного напряжения может включать в себя создание трансимпендансного усиления в первом каскаде входной схемы с помощью конфигурирования первого каскада в качестве схемы интегратора. Способ может включать в себя генерацию выходного сигнала в первом каскаде с помощью выполнения деления входного напряжения и усиление выходного сигнала первого каскада входной схемы усилением по напряжению второго каскада входной схемы для создания выходного сигнала для второго каскада входной схемы. Идентифицированный шум может включать в себя основной источник шума датчика, причем идентифицированный шум может быть связан с частотой жидкокристаллического устройства отображения или с рабочей частотой флуоресцентной лампы подсветки с холодным катодом. Первый каскад может включать в себя шум на таком уровне шума, что выходной сигнал для второго каскада входной схемы может включать в себя шум первого каскада, усиленный с помощью функции усиления по напряжению второго каскада. Шум в выходном сигнале второго каскада может быть меньше основного источника шума датчика. Первый каскад может включать в себя шум на таком уровне шума, что выходной сигнал для второго каскада входной схемы включает в себя шум первого каскада, усиленный с помощью функции усиления по напряжению второго каскада, и шум в выходном сигнале второго каскада может быть меньше шума датчика, который получен из частоты жидкокристаллического устройства отображения или рабочей частоты флуоресцентной лампы подсветки с холодным катодом. Передаточная функция замкнутой системы входной схемы может быть устойчивой.
В общем случае другой аспект объекта изобретения, описанного в данном описании, может воплощаться в способах, которые включают в себя действия, относящиеся к устройству обработки данных, связанному с емкостным датчиком прикосновения, причем датчик включает в себя соединительные линии, скомпонованные в строках и столбцах с матричной конфигурацией. Способ включает в себя осуществление первого сканирования, включающего в себя сканирование столбцов емкостного датчика прикосновения в структуре с чередованием, причем структура с чередованием включает в себя кадр, и причем кадр содержит число n субкадров, причем n - целое число. Способ включает в себя использование информации, сгенерированной как результат первого сканирования, для идентификации областей датчика, которые подверглись изменению емкости между строкой и столбцом, использование обнаружения областей датчика, которые подверглись изменению емкости, для информирования выбора поднабора столбцов, на которые следует направить второе и последующее сканирование, и сканирование поднабора столбцов, выбранных для второго и последующего сканирования. Сканирование поднабора столбцов может предусматривать определение уровня сигнала и уровня шума для второго сканирования и определение отношения сигнал/шум, основываясь на уровне сигнала и уровне шума, определенных для второго сканирования, и сопоставление с областями датчика, в которых произошло изменение емкости.
Каждый из этих и других вариантов осуществления может необязательно включать в себя одну или большее количество следующих особенностей. Первое сканирование может включать в себя определение уровня сигнала и уровня шума для первого сканирования, и определение отношения сигнал/шум, основываясь на уровне сигнала и уровне шума, определенных для первого сканирования. Способ может предусматривать прием сигналов для первого и второго сканирований, и определение объединенного отношения сигнал/шум, которое выше отношений сигнал/шум, связанных с первым или вторым сканированиями, с помощью усреднения сигналов, которые приняты для первого и второго сканирований. Значение n, например, может быть равно 4. Кадр может быть сконфигурирован так, чтобы он имел частоту около 30 Гц, и субкадры могут иметь частоту около 120 Гц, причем структура с чередованием может включать в себя 16 столбцов на кадр и 4 столбца на субкадр. Задержка датчика может составлять приблизительно 120 Гц. Емкость между строкой и столбцом может содержать краевую емкость.
В общем случае другой аспект объекта изобретения, описанного в данном описании, может воплощаться в способах, которые включают в себя действия, относящиеся к устройству обработки данных, связанному с емкостным датчиком прикосновения. Датчик включает в себя соединительные линии, скомпонованные в строках и столбцах с матричной конфигурацией. Способ включает осуществление первого сканирования, включающего в себя сканирование столбцов емкостного датчика прикосновения в структуре с чередованием, причем структура с чередованием включает в себя кадр, причем кадр содержит число n субкадров, причем n - целое число, и использование информации, сгенерированной как результат первого сканирования, который идентифицирует области датчика, которые подверглись изменению емкости между строкой и столбцом. Способ включает в себя использование обнаружения областей датчика, которые подверглись изменению емкости, для информирования выбора поднабора столбцов, на которые следует направить второе и последующее сканирование, и сканирование поднабора столбцов, выбранных для второго и последующего сканирования, причем первое сканирование связано с первым измерением, причем второе сканирование связано со вторым измерением. Сканирование поднабора столбцов предусматривает определение целевого уровня сигнала и уровня шума для второго сканирования, определение целевого отношения сигнал/шум и определение периода интеграции для достижения целевого отношения сигнал/шум, используя функцию, которая является определением среднего значения второго измерения и первого измерения.
Каждый из этих и других вариантов осуществления может необязательно включать в себя одну или большее количество следующих особенностей. Первое сканирование может включать в себя определение уровня сигнала и уровня шума для первого сканирования и определение целевого отношения сигнал/шум, основываясь на уровне сигнала и уровне шума, определенных для первого сканирования. Способ может включать в себя прием сигналов для первого и второго сканирований и определение сигнала с отношением сигнал/шум, которое выше отношений сигнал/шум, связанных с первым или вторым сканированиями, с помощью усреднения сигналов, которые приняты для первого и второго сканирований. Значение n может быть равно приблизительно 4. Кадр может быть сконфигурирован так, чтобы он имел частоту приблизительно 30 Гц, и субкадры могут иметь частоту приблизительно 120 Гц, причем структура с чередованием может включать в себя 16 столбцов на кадр и 4 столбца на субкадр. Задержка датчика может составлять приблизительно 120 Гц, и емкость между строкой и столбцом может включать в себя краевую емкость.
В общем случае другой аспект объекта изобретения, описанного в данном описании, может воплощаться в способах, которые включают в себя действия, относящиеся к устройству обработки данных, связанному с емкостным датчиком прикосновения, причем датчик включает в себя соединительные линии, скомпонованные в строках и столбцах с матричной конфигурацией, и столбцы скомпонованы как n наборов столбцов, и n - целое число. Способ предусматривает последовательное осуществление первого сканирования каждого из n наборов столбцов емкостного датчика прикосновения в структуре с чередованием, использование информации, сгенерированной в результате первого сканирования, для идентификации областей датчика, которые подверглись изменению в краевой емкости, краевая емкость содержит емкость между строкой и столбцом, и использование обнаружения областей датчика, которые подверглись изменению емкости, для информирования выбора поднабора каждого из n наборов столбцов, на которые следует направить второе и последующее сканирование, соответственно. Способ предусматривает сканирование поднабора каждого из n наборов столбцов, выбранных для второго и последующего сканирования, причем первое сканирование связано с первым измерением, и второе сканирование связано со вторым измерением. Сканирование каждого поднабора из n наборов столбцов предусматривает определение уровня сигнала и уровня шума для второго сканирования, определение целевого отношения сигнал/шум, и определение периода интеграции для достижения целевого отношения сигнал/шум, посредством использования функции, которая определяет среднее значение второго измерения и первого измерения. Для каждого набора столбцов и соответствующих поднаборов столбцов в n наборах столбцов первое сканирование и второе сканирование осуществляют перед началом сканирования в последующем наборе столбцов и соответствующих поднаборах столбцов.
Каждый из этих и других вариантов осуществления может дополнительно включать в себя одну или большее количество следующих особенностей. Для каждого поднабора из n наборов столбцов способ может предусматривать следующие методики: сканирование поднабора столбцов в течение периода интеграции; получение второго измерения, относящегося к принятым сигналам сканирования поднабора столбцов, причем второе измерение относится к полученному из второго измерения отношению сигнал/шум; определение, сконфигурирован или нет поднабор столбцов так, чтобы он имел по меньшей мере минимальное отношение сигнал/шум; определение на основе полученного из второго измерения отношения сигнал/шум, является или нет полученное из второго измерения отношение сигнал/шум меньше минимального отношения сигнал/шум для поднабора столбцов; и после определения, что полученное из второго измерения отношение сигнал/шум меньше минимального отношения сигнал/шум для поднабора столбцов, выполнение другого сканирования поднабора столбцов; получение другого измерения, относящегося к принятым сигналам другого сканирования поднабора столбцов, и усреднение измерения и другого измерения поднабора столбцов для создания объединенного измерения, которое имеет свойство, что отношение сигнал/шум, относящееся к объединенному измерению, выше отношения сигнал/шум, относящегося к любому из измерений для поднабора столбцов.
В общем случае другой аспект объекта изобретения, описанного в данном описании, может воплощаться в способах, которые включают в себя действия, относящиеся к устройству обработки данных, связанному с емкостным датчиком прикосновения, причем датчик включает в себя соединительные линии, скомпонованные в строках и столбцах с матричной конфигурацией, и столбцы скомпонованы как n наборов столбцов, где n - целое число. Способ предусматривает последовательное осуществление первого сканирования каждого из n наборов столбцов емкостного датчика прикосновения в структуре с чередованием, и использование информации, сгенерированной в качестве результата первого сканирования, для идентификации областей датчика, которые подверглись изменению в краевой емкости, причем краевая емкость включает в себя емкость между строкой и столбцом. Способ предусматривает использование обнаружения областей датчика, которые подверглись изменению емкости, для информирования выбора поднабора каждого из n наборов столбцов, на которые следует направить второе и последующие сканирования, соответственно, и сканирование поднабора каждого из n наборов столбцов, выбранных для второго и последующего сканирования. Сканирование каждого поднабора из n наборов столбцов может включать в себя определение уровня сигнала и уровня шума для второго сканирования, и определение отношения сигнал/шум, основываясь на уровне сигнала и уровне шума, определенном для второго сканирования, и сопоставление с областями датчика, в которых произошло изменение емкости. Для каждого набора столбцов и соответствующих поднаборов столбцов в n наборах столбцов первое сканирование и второе сканирование осуществляют перед началом сканирования в последующем наборе столбцов и соответствующих поднаборах столбцов.
Каждый из этих и других вариантов осуществления может дополнительно включать в себя одну или большее количество следующих особенностей. Для каждого поднабора из n наборов столбцов способ может предусматривать сканирование поднабора столбцов в течение периода интеграции, получение результата измерения отношения сигнал/шум, относящегося к сканированию данного поднабора столбцов, и определение, сконфигурирован или нет поднабор столбцов так, чтобы он имел по меньшей мере минимальное отношение сигнал/шум. Для каждого поднабора из n наборов столбцов способ может также предусматривать определение на основе измерения отношения сигнал/шум, является или нет измерение отношения сигнал/шум меньше минимального отношения сигнал/шум для поднабора столбцов. Для каждого поднабора n из наборов столбцов способ может предусматривать после определения, что измерение отношения сигнал/шум меньше минимального отношения сигнал/шум для поднабора столбцов, выполнение другого сканирования поднабора столбцов, получение другого измерения отношения сигнал/шум, относящегося к другому сканированию поднабора столбцов, и усреднение измерения и другого измерения поднабора столбцов для создания объединенного измерения, у которого есть свойство, что отношение сигнал/шум, относящееся к объединенному измерению, выше отношения сигнал/шум, относящегося к любому из измерений поднабора столбцов.
В общем случае другой аспект объекта изобретения, описанного в данном описании, может воплощаться в способах, которые включают в себя действия, относящиеся к устройству обработки данных, связанному с емкостным датчиком прикосновения, данный датчик расположен в системе, содержащей жидкокристаллическое устройство отображения. Способ включает в себя определение частоты шума в емкостном датчике прикосновения, идентификацию, что частота шума является функцией от частоты жидкокристаллического устройства отображения, и определение частоты возбуждения для датчика в качестве функции от определенной частоты шума. Способ определения частоты возбуждения включает в себя выбор начальной частоты возбуждения для датчика, вычисление взаимной корреляции между частотой шума и начальной частотой возбуждения за период интеграции, причем вычисление взаимной корреляции представлено в колебательном сигнале, аналогичном функции «кардинального синуса» по меньшей мере с одним пиком и по меньшей мере с двумя провалами, и выбор частоты возбуждения для датчика с помощью выбора частоты в одном из провалов в колебательном сигнале, аналогичном функции «кардинального синуса», и назначение определенной частоты возбуждения так, чтобы она имела ту же самую частоту, как частота в выбранном провале.
Каждый из этих и других вариантов осуществления может дополнительно включать в себя одну или большее количество следующих особенностей. Частота шума может быть в пределах диапазона от приблизительно 30 кГц до приблизительно 135 кГц. Емкостной датчик прикосновения может иметь максимальное напряжение передачи приблизительно 200 В. Емкостный датчик прикосновения может быть сконфигурирован для обеспечения того, чтобы через пользователя проходил ток, который имеет порядок приблизительно десятки мкА. Емкостный датчик прикосновения может включать в себя входной интерфейс. Способ может включать в себя демодуляцию колебательного сигнала на выходе входного интерфейса емкостного датчика прикосновения. Колебательный сигнал может предусматривать взаимную корреляцию частоты шума с начальной частотой возбуждения. Способ может предусматривать измерение уровня шума в датчике и установку начального порогового значения для обнаружения касания пользователя датчика, основываясь на уровне измеренного шума. Способ может предусматривать непрерывное измерение уровня шума в датчике и непрерывную корректировку порогового значения для обнаружения касания пользователя датчика, основываясь на уровне непрерывно измеряемого шума. Способ может предусматривать определение ортогональных колебательных сигналов возбуждения для датчика, причем по меньшей мере один из ортогональных колебательных сигналов возбуждения включает в себя выбранную частоту возбуждения. Датчик может быть сконфигурирован для одновременной передачи множества ортогональных колебательных сигналов возбуждения. Все ортогональные колебательные сигналы возбуждения могут быть ортогональны к определенной частоте шума.
В общем случае другой аспект объекта изобретения, описанного в данном описании, может воплощаться в способах, которые включают в себя действия, относящиеся к устройству обработки данных, связанному с емкостным датчиком прикосновения, содержащим строки и столбцы соединительных линий, скомпонованных в матричной конфигурации, данный датчик расположен в системе, содержащей жидкокристаллическое устройство отображения. Способ включает в себя идентификацию частоты шума, генерацию колебательного сигнала возбуждения для передачи по меньшей мере по одной из соединительных линий в датчике, причем колебательный сигнал возбуждения сгенерирован таким образом, что колебательный сигнал возбуждения ортогонален к идентифицированной частоте шума, и причем колебательный сигнал возбуждения сгенерирован таким образом, что шум на идентифицированной частоте шума устраняют в колебательном сигнале возбуждения. Генерация колебательного сигнала возбуждения включает в себя определение в частотной области начального колебательного сигнала возбуждения и преобразование начального колебательного сигнала возбуждения из частотной области в колебательный сигнал возбуждения во временной области посредством использования преобразования Фурье в данном преобразовании. Способ предусматривает передачу колебательного сигнала возбуждения по меньшей мере по одной из соединительных линий.
В общем случае другой аспект объекта изобретения, описанного в данном описании, может воплощаться в способах, которые включают в себя действия, относящиеся к устройству обработки данных, связанному с емкостным датчиком прикосновения, который имеет строки и столбцы соединительных линий, скомпонованные в матричной конфигурации, причем данный датчик расположен в системе, содержащей жидкокристаллическое устройство отображения. Способ включает в себя идентификацию частоты шума и генерацию колебательных сигналов возбуждения для передачи по меньшей мере по одной из соединительных линий в датчике, причем колебательный сигнал возбуждения сгенерирован таким образом, что колебательный сигнал возбуждения ортогонален к идентифицированной частоте шума, и причем колебательный сигнал возбуждения сгенерирован таким образом, что шум в идентифицированной частоте шума устраняют в колебательном сигнале возбуждения. Генерация колебательного сигнала возбуждения предусматривает выбор начального колебательного сигнала возбуждения, выбор алгоритма, соответствующего фильтру с конечной импульсной характеристикой, и генерацию колебательного сигнала возбуждения, применяя алгоритм, соответствующий фильтру с конечной импульсной характеристикой, к начальному колебательному сигналу возбуждения. Способ предусматривает передачу колебательного сигнала возбуждения по меньшей мере по одной из соединительных линий. Могут проводиться измерение интенсивности принятого сигнала, который скоррелирован с ожидаемым колебательным сигналом, которая может быть пропорциональна емкости в матрице. Отношение сигнал/шум этого измерения может быть функцией от временного интервала интеграции, причем более длительный временной интервал интеграции может использоваться для достижения более высоких отношений сигнал/шум. Колебательные сигналы возбуждения могут быть ортогональны друг другу и передаваться одновременно, а в других реализациях колебательные сигналы возбуждения могут быть ортогональны друг другу, а так же к шуму, и передаваться одновременно.
Подробности одного или большего количества вариантов осуществления объекта изобретения, описанного в данном описании, сформулированы в приведенных ниже сопроводительных чертежах и описании. Другие особенности и аспекты объекта изобретения станут очевидны из описания, чертежей и формулы изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 изображает схему примера структуры электродов в матрице для датчика прикосновения.
Фиг. 2 изображает схему примера, относящуюся к некоторым эффектам ослабления и сдвига по фазе от фильтрации резистивно-емкостной (RC) линии в системе воспринимающей прикосновение.
Фиг. 3 изображает схему примера, включающую в себя передатчики, которые имеют соответствующую логику управления для возбуждения напряжений по линиям матрицы.
Фиг. 4 изображает схему примера, включающую в себя передатчики и приемники для возбуждения напряжений и восприятия токов по линиям матрицы.
Фиг. 5 изображает график примера трехмерного сетчатого графика измеренной емкости относительно местоположения по матрице.
Фиг. 6A и 6B изображают схемы примеров колебательных сигналов для передатчиков, возбуждая матрицу с помощью напряжения, которое аналогично шуму и не является чистым синусоидальным тоном или близким приближением к нему.
Фиг. 7A и 7B изображают примеры временных диаграмм для кадров и субкадров.
Фиг. 8A изображает последовательность операций примера способа сканирования полного кадра датчика.
Фиг. 8B изображает последовательность операций примера способа сканирования одного столбца датчика.
Фиг. 9 изображает график примера шума на выходе аналогового входного блока системы перед выполнением демодуляции.
Фиг. 10 изображает график примера шума на выходе аналогового входного блока после выполнения демодуляции с хорошим выбором колебательного сигнала возбуждения.
Фиг. 11 изображает график примера шума на выходе аналогового входного блока после выполнения демодуляции с плохим выбором колебательного сигнала возбуждения.
Фиг. 12 изображает график примера корреляции частоты шума с частотой возбуждения за период интеграции.
Фиг. 13 изображает график примера выходных характеристик от однокаскадного входного усилителя и двухкаскадного входного усилителя.
Фиг. 14A изображает пример входной схемы двухкаскадного усилителя.
Фиг. 14B изображает последовательность операций примера для разработки входного усилителя с надлежащими значениями емкости и сопротивления для стабильности.
Одинаковые ссылочные номера и значения символов на различных чертежах указывают одинаковые элементы.
ПОДРОБНОЕ ОПИСАНИЕ
Датчик прикосновения может включать в себя решетку из прозрачных, проводящих электродов, причем измерение емкости в датчике прикосновения может выполняться между электродами. Эти электроды могут быть сделаны из оксида индия и олова (ITO), но могут также использоваться другие материалы, такие как серебряные нанопровода, или металлические провода большего размера, которые незначительно или в значительной степени непрозрачны, но достаточно небольшие, чтобы быть относительно незаметными. Электроды могут быть скомпонованы в двумерной ортогональной сетке, например, со строками, параллельными оси X, и столбцами, параллельными оси Y. Обусловленная этой структурой полная емкость, которую измеряют между строкой и столбцом, может включать в себя по меньшей мере емкость плоскопараллельного конденсатора там, где строка может пересекать столбец, и краевую емкость, такую, что краевое поле может быть направлено наружу от датчика и взаимодействовать, например, с касанием пользователя. Первичная емкость, которая может быть измерена для восприятия, может включать в себя краевое поле по меньшей мере между строкой и столбцом. Например, в системе с m строками и n столбцами, могут существовать m*n возможных измерений, один результат измерения в каждом пересечении в матрице. Этот тип измерения может иногда упоминаться как «взаимная емкость» или «дифференциальная емкость».
Электроды в датчике можно разрабатывать в структуре, которая стремится сделать максимальной краевую емкость, которая может нарушаться пальцем пользователя для обеспечения необходимого или целевого сигнала, и сделать минимальной любую дополнительную емкость между строкой и столбцом (например, емкость плоскопараллельного конденсатора), что может обеспечивать постоянное смещение. Емкость плоскопараллельного конденсатора можно рассматривать, например, как значение смещения в полной емкости. Строки и столбцы в матрице могут располагаться почти в одной плоскости, так что пока площадь соответствующего плоскопараллельного конденсатора небольшая, разделяющее расстояние также будет небольшое, и значение его емкости может быть существенным. Структуру электродов можно также разрабатывать таким способом, чтобы для заданного шага сделать ширину линии настолько большой, насколько это возможно, для минимизации сопротивления дорожек, которое иначе может быть существенным, если используются датчики с большой площадью. Краевую емкость можно сделать максимальной, например, с помощью разработки такой структуры, чтобы результирующая краевая емкость могла быть сделана как можно больше.
Фиг. 1 изображает примерную схему структуры 100 электродов в матрице для датчика прикосновения. В этой структуре 100 вертикальные дорожки 110 и связанные соединенные области обозначают проводник на одном слое, и горизонтальные дорожки 120 и связанные соединенные области обозначают проводник на другом слое. Слои 110, 120 отделены друг от друга. В этой реализации слои 110, 120 пересекают друг друга, но не соединяются друг с другом. Структура представляет емкость плоскопараллельного конденсатора, причем нежелательная емкость плоскопараллельного конденсатора может быть минимизирована, делая узкими дорожки электрода там, где они пересекают друг друга, сопротивление может быть уменьшено и минимизировано, делая дорожки электрода относительно широкими в других областях.
Другие реализации могут иметь другие структуры электродов. В одной из реализаций, например, одна структура может иметь расположенные с равными интервалами прямые линии с одинаковым шагом, как в электрической матрице, прямые линии - на расстоянии пальца в данной электрической матрице, со смежными линиями, соединенными вместе в группы, и встречно-штыревые структуры для увеличения периметра между данными строкой и столбцом для увеличения краевого поля.
Могут существовать другие измерения, выполняемые в структуре электродов. Например, емкость можно измерять от каждой строки и столбца к «земле», вместо измерения емкости между каждой строкой и каждым столбцом, таким образом делая m+n измерений вместо m*n измерений.
В данном раскрытии описаны реализации, в которых измерение емкости выполняют от каждой строки до каждого столбца. Может существовать схема, разработанная для выполнения этого типа измерения, данная схема имеет передатчики и приемники на соответствующих столбцах и строках. В реализации этой схемы столбцы могут возбуждаться с помощью напряжения передачи так, чтобы энергия вытекала из передатчика в столбцы, и приемник может измерять ток в строках так, чтобы энергия вытекала из строк и в приемник. Хотя назначение одной оси в качестве строк, а другой - в качестве столбцов в общем случае случайно, в этой реализации строки в общем случае могут быть присоединены к приемникам, а столбцы в общем случае могут быть присоединены к передатчикам.
Когда пользователь касается емкостного датчика прикосновения, наблюдаются по меньшей мере два различных эффекта. Во-первых, часть энергии, вытекающей из передатчика, может протекать через пользователя и возвращаться к «земле» через паразитную емкость пользователя по отношению к этой точке пересечения. Эта паразитная емкость может возникать, например, если пользователь держится за металлический корпус устройства, даже через непроводящее покрытие, или, в отсутствии этого, через палец пользователя, потому что шаг датчика может быть достаточно мелким, так что его палец может также быть расположен близко к другим элементам в матрице, в которой некоторые элементы «заземлены». Этот первый эффект может уменьшать полную энергию, которая течет в приемник. Во-вторых, часть энергии, вытекающей из передатчика, может поступать в палец пользователя через плоть пользователя, и затем из пальца пользователя - на приемник. Поскольку диэлектрическая постоянная пальца пользователя, которая является приблизительно такой же, как у соленой воды, больше диэлектрической постоянной воздуха, это может увеличивать эффект взаимодействия, и увеличивать принятую энергию.
Эти два эффекта могут создавать различные характеристики для потока энергии. Например, в зависимости от того, какой эффект преобладает, может существовать немонотонная зависимость между измеренным сигналом и расстоянием от пальца пользователя до датчика. Поскольку это может быть нежелательно, реализации системы могут разрабатываться так, чтобы они работали в режиме или строгого увеличения, или строгого уменьшения, чтобы иметь монотонную зависимость. Режим строгого уменьшения может быть предпочтителен в некоторых реализациях, потому что он может возникать на более высоких частотах, что может предоставлять возможность, чтобы более полный заряд перемещался за данный период интеграции для более высокого ОСШ, и режим строгого уменьшения может обеспечивать большие разделения между датчиком и пальцем пользователя, что может предоставлять возможность использования большей толщины для стекла для покрытия датчика. Некоторые другие реализации, однако, могут использовать режим строгого увеличения.
В некоторых реализациях колебательный сигнал передачи может иметь, например, частоту приблизительно 100 кГц. Если энергия колебательного сигнала передачи сконцентрирована главным образом на более низких частотах, то энергия может не эффективно поступать к пользователю, потому что соединение является емкостным, так что ток для данного напряжения возбуждения может увеличиваться с частотой. Если энергия сконцентрирована главным образом на более высоких частотах, то характеристики распространения (сигналов) строки или столбца в пределах датчика могут уменьшать энергию. В некоторых реализациях характеристики распространения могут быть смоделированы как однородная RC-линия, или низкочастотный фильтр. Колебательный сигнал передачи может включать в себя, например, небольшое число циклов немодулированной несущей. Поскольку этот колебательный сигнал может быть узкополосным, может быть полезно немного увеличить полосу пропускания сигнала, например, модулируя несущую с помощью шумоподобного колебательного сигнала. Эта методика может иметь эффект увеличения помехоустойчивости системы по отношению к узкополосному шуму и уменьшения тенденции системы излучать узкополосный шум.
Приемник может быть сконфигурирован для измерения количества энергии, принятой в течение заданного интервала времени. Одна из реализаций для этого приемника предусматривает реализацию в качестве «пикового детектора», который относится к схеме широкополосного приемника, которая может измерять максимальный ток, принятый за заданный промежуток времени. Если единственный присутствующий сигнал является сигналом от передатчика, то этот максимальный ток может быть пропорционален амплитуде сигнала, принятого от передатчика. Другие реализации приемника могут быть сконфигурированы для измерения тока, отделяя намеченный сигнал от шума.
В некоторых реализациях датчика производительность системы может быть фактически ограничена ее ОСШ. Например, когда интерполируют позицию касания на датчике, шум на измеренной емкости может осуществлять отображение непосредственно на шум на сообщаемой позиции (x, y). В некоторых крайних случаях, например, сам шум может даже вносить вклад в создание ложных касаний. Может существовать несколько источников шума для датчика. Например, одним существенным источником может быть жидкокристаллическое устройство отображения (LCD). Например, если датчик прикосновения установлен поверх экрана прикосновения, то шум от LCD может присутствовать и может проникать в датчик прикосновения. Другие существенные источники шума могут включать в себя соседние радиостанции (например, радиовещание с амплитудной модуляцией (AM)), и 50 или 60 Гц, передаваемые от электрических сетей, которые, хотя хорошо отделены по частоте от необходимого или целевого сигнала, могут иметь очень большую амплитуду.
В других реализациях приемника архитектура приемника может быть сконфигурирована так, чтобы искать только компонент принятого сигнала, который коррелируется с переданным сигналом. Для этих реализаций приемника для входящего тока r(t) и ожидаемого тока e(t) приемник может вычислять интеграл за период интеграции r(t)*e(t).
В некоторых реализациях возможно аппроксимировать эту корреляцию, помещая линейный фильтр перед пиковым детектором или перед некоторым другим детектором широкополосных сигналов. В некоторых из этих реализаций более узкий фильтр может потребовать более длительного времени стабилизации, что может воздействовать на частоту кадров системы. Корреляция по установленному интервалу может также потребовать более длительного времени для достижения более узкой полосы пропускания. Но при использовании фильтра в общем случае некоторая часть доступного временного интервала интеграции не используется, пока ожидают, когда фильтр стабилизируется после предыдущего измерения, хотя при корреляции по фиксированному интервалу интегратор может сбрасываться между измерениями. Это может предоставлять возможность полного использования доступного временного интервала интеграции.
Вычисление интеграла может иметь различные реализации. Например, некоторые реализации могут включать в себя сигма-дельта аналого-цифровой преобразователь (SD-ADC), контур управления которого может пытаться поддерживать строку в постоянном напряжении и может подавать для этого достаточный заряд. С помощью измерения этого заряда SD-ADC может непосредственно преобразовывать ток в цифровое значение и может поддерживать строку в низком полном сопротивлении, как может требоваться. Реализация SD-ADC может быть подходящей для интеграции на обычных CMOS процессах, потому что SD-ADC использует переключатели, конденсаторы и цифровую логику.
Другие реализации для вычисления периода интеграции могут использовать более простые схемы управляемого конденсатора. Например, одну из таких схем управляемого конденсатора можно сделать фактически с помощью создания низкочастотного RC-фильтра, в котором C - емкость реального конденсатора, и R- сопротивление резистора управляемого конденсатора со значением 1/(f*Cut), где Cut- тестируемый конденсатор, и f - частота переключения. С помощью измерения временной постоянной этого фильтра - например, применяя к нему скачек напряжения и измеряя время для достижения определенного порогового значения напряжения, или применяя скачек напряжения, предоставляя ему возможность стабилизироваться в течение фиксированного времени, и измеряя напряжение после этого времени - можно измерять Cut. Другие аналогичные реализации схем управляемого конденсатора, в которых постоянный ток разряжает интегрирующий конденсатор, в то время как ток управляемого конденсатора заряжает его, предусматривает контур управления, который поддерживает интегрирующий конденсатор в постоянном напряжении.
Данные описания обеспечены для реализаций и (1) методик, предусматривающих емкостный датчик прикосновения, который использует цифровую обработку сигналов для корреляции переданного колебательного сигнала с сигналом в приемнике в датчике; (2) методик для матрицы емкостного восприятия прикосновения, которая имеет передатчики и приемники, причем передатчики передают ортогональные колебательные сигналы, и каждый приемник выполняет корреляцию отдельно с каждым переданным колебательным сигналом; (3) методик для локального улучшения отношения сигнал/шум в емкостном датчике прикосновения с помощью выборочного сканирования; (4) методик для обеспечения помехоустойчивости в переданном колебательном сигнале для емкостного датчика прикосновения; и (5) методик для разработки аналоговых входных схем для системы емкостного восприятия прикосновения.
Корреляция в пределах приемника
В данном документе описано несколько методик и реализаций, предусматривающих емкостный датчик прикосновения, который использует цифровую обработку сигналов для корреляции переданного колебательного сигнала с сигналом в приемнике в датчике. В одной реализации, например, выходное напряжение VD0 от аналоговой входной схемы системы датчика можно дискретизировать, используя аналого-цифровой преобразователь (ADC). Корреляция этого дискретного сигнала с переданным колебательным сигналом может затем вычисляться в цифровой форме, как сумма за период интеграции VD0[k]*E[k], где E[k] является ожидаемым принятым сигналом. Эта сумма может вычисляться, например, посредством использования программируемой пользователем вентильной матрицы (FPGA), выбирая E[k] как 0, -1 или +1, причем корреляция может вычисляться с помощью суммирующего и/или вычитающего устройства. Эта реализация может вводить относительно небольшую ошибку и может предоставлять возможность эффективной реализации в цифровой логике.
Ожидаемый сигнал E[k] может определяться для выполнения корреляции. В некоторых реализациях принятый сигнал мог быть примерно таким же, как переданный сигнал, так что этот принятый сигнал может использоваться для корреляции с таким же сигналом, который передается. Практически эти реализации могут не создавать точный E[k] по меньшей мере из-за характеристик матрицы датчика, которая может вызывать задержку, ослабление и/или сдвиги по фазе. Например, матрица датчика может быть сделана из длинных строк и столбцов, которые могут быть сформированы из прозрачного проводящего материала. Эти материалы могут иметь относительно большое электрическое сопротивление. Например, соединительные линии, сделанные из оксида индия и олова (ITO), могут иметь приемлемую максимальную толщину, соответствующую удельному поверхностному сопротивлению приблизительно 50 Ом/квадрат. Элементарная ячейка, например, может иметь три или четыре квадрата, и типичный шаг структуры может быть, например, приблизительно 5 мм. 500-миллиметровая дорожка, которая обычно используется в 1000-миллиметровом устройстве отображения, например, может иметь приблизительно 100 ячеек, или 400 квадратов, или сопротивление ~20к Ом. Более толстое покрытие ITO могло уменьшать это сопротивление, а так же увеличивать оптическую потерю и помутнение. При 30 Ом на квадрат обычное покрытие ITO, возможно, не приемлемо с точки зрения внешнего вида для некоторых реализаций. Более тонкие покрытия, с удельным поверхностным сопротивлением в сотни Ом на квадрат, например, могут использоваться в меньших экранах, таких, как экраны сотовых телефонов и других переносных устройств, поскольку линии в таких экранах намного короче, таким образом полное сопротивление не столь большое.
Датчик также может иметь некоторую емкость по меньшей мере между каждой строкой и каждым столбцом, и между каждой строкой или столбцом и пластиной «земли» (например, заземленным по переменному току (AC) металлу LCD). При одном из подходов для оценки значений ячейка может, например, иметь площадь приблизительно 5*5/2~10 мм^2, и если она отделена на 0,5 мм от платы «земли» материалом с диэлектрической постоянной, которая приблизительно равна 3, тогда полная емкость может быть приблизительно 1 пФ. Емкость плоскопараллельного конденсатора C=epsilon*A/d может быть несколько меньше этой величины, но краевые поля могут вносить существенный вклад в емкость. Произведение tau=RC может быть приблизительно 2 мкс, что соответствует -3 децибела частоты 80 кГц, принимая каждое из этих сопротивлений и емкостей в качестве элемента с сосредоточенными параметрами.
Практически и сопротивление, и емкость имеют тенденцию быть распределенными, и они могут быть примерно равномерно распределены по соединительной линии. Например, емкость (или сопротивление) может быть неравномерно распределенной по ячейке, но относительно постоянной в ячейке, и ячейки могут быть небольшими по сравнению с полной длиной линии, так, чтобы емкость могла быть примерно равномерно распределенной по всей длине линии. Соответственно, при другом подходе к оценке значений схема для датчика может быть проанализирована как линия передачи с незначительной индуктивностью L и шунтовой проводимостью G и заданными R и C. Независимо от подхода к анализу сигнал на линии имеет тенденцию уменьшаться (то есть имеет меньшую амплитуду) и задерживаться (или, эквивалентно, сдвигаться по фазе) по сравнению с переданным сигналом. Описаны реализации, в которых приемник может быть сконфигурирован для компенсации этих эффектов.
В некоторых реализациях компенсация может выполняться с помощью применения ожидаемого сдвига по фазе (или задержки) к ожидаемому колебательному сигналу E[k] и выполнения корреляции с задержанной версией сигнала. Правильная задержка может быть различной для каждого пересечения в матрице, несмотря на то, что ошибка, введенная с помощью корректировки фазы только по более длинному измерению датчика, и с помощью отбрасывания эффектов более короткого измерения (например, выполняя корректировку только по строкам для обычного 16:9 устройства отображения в горизонтальном формате), может быть незначительной. Правильный сдвиг по фазе может определяться экспериментально, например, измеряя корреляцию при множестве сдвигов по фазе, и выбирая сдвиг по фазе, который увеличивает и делает максимальной эту корреляцию. Правильный сдвиг по фазе может также определяться экспериментально с помощью выполнения корреляции и с синфазной, и с квадратурной (например, сдвинутой на девяносто градусов) версиями переданного сигнала, и последующего вычисления правильного сдвига по фазе phi=atan(corr_q, corr_i) из этих корреляций. В некоторых реализациях ожидаемый сдвиг по фазе можно вычислять, используя известные сопротивление и емкость датчика, или сдвиг по фазе можно интерполировать между небольшим числом экспериментально измеренных сдвигов по фазе.
Фиг. 2 изображает схему примера, относящегося к эффектам ослабления и сдвига по фазе от фильтрации резистивно-емкостной (RC) линии. Схема показывает графики нескольких сигналов, основанные на уровне напряжения в зависимости от времени, причем данная схема основана на модели 235, причем одна ячейка добавляет шунтирующую емкость 2 пФ и последовательное сопротивление 150 Ом (что может быть типичным, например, если датчик использует ITO покрытие 50 Ом/квадрат), и возбуждение с частотой 100 кГц. Как показано на фиг. 2, когда исходный переданный сигнал 205 посылают через датчик с длиной линии, равной 10 ячеек, принятый сигнал 210 задерживается/сдвигается по фазе, и он имеет меньшую амплитуду, чем исходный переданный сигнал 205. Когда исходный переданный сигнал 205 посылают через датчик по линии длиной 100 ячеек, принятый сигнал 230 задерживается/сдвигается по фазе 220, и имеет большее ослабление 215 и меньшую амплитуду, чем исходный переданный сигнал 205 и принятый сигнал 210. Когда исходный переданный сигнал 205 посылают через датчик по линии с длиной, равной 300 ячеек, принятый сигнал 225 задерживается/сдвигается по фазе, и он имеет меньшую амплитуду, чем исходный переданный сигнал 205, принятый сигнал 210 и принятый сигнал 230.
Если колебательный сигнал передачи включает в себя энергию на одной частоте, то влияние RC-линии может быть описано как ослабление и сдвиг по фазе. Если колебательный сигнал более сложный - например, если шумоподобный код используется для увеличения полосы пропускания сигнала и улучшения электромагнитной совместимости системы (EMC) - тогда различные компоненты частоты сигнала могут быть преобразованы по-разному, и применяемое к сигналу преобразование может быть более сложным. Это преобразование может быть смоделировано или измерено опытным путем, и его можно также применять к ожидаемому колебательному сигналу. Например, преобразование может быть смоделировано так, чтобы оно имело сдвиг по фазе (например, задержку) и ослабление на конкретной частоте, влияние линейной фильтрации или любую их комбинацию. Преобразование может применяться к синусоидальному колебательному сигналу для сигнала ожидаемой корреляции или к несинусоидальному колебательному сигналу для сигнала ожидаемой корреляции. Сигнал корреляции может быть в аналоговой области или в цифровой области.
В некоторых реализациях система может быть чувствительна к задержки в RC-линиях только потому, что она выполняет фазово-когерентную демодуляцию в своем приемнике. Некогерентному приемнику (например, пиковому детектору или системе, которая вычисляет корреляции и с синфазной, и с квадратурной версиями сигнала и возвращает sqrt(corr_q^2+corr_i^2) или некоторое приближение к этой функции), возможно, не требуется этой коррекции. Но когерентная демодуляция может использоваться для уменьшения принимаемой мощности шума с коэффициентом два, предполагая, что шум идет со случайной фазой. Когерентная демодуляция может помочь в улучшении ОСШ.
В некоторых реализациях, если датчик возбуждают только с двух краев (например, c одного края для строк и c одного края для столбцов), то произведение R*C может определяться с помощью сопротивления и емкости на единицу длины линий и фактических длин линий, причем самым плохим случаем может быть конец каждой дорожки, самый дальний от контактов, для которого полное сопротивление и полная емкость могут определяться как R и C, соответственно. В других реализациях датчик может возбуждаться со всех четырех краев, в этом случае постоянную времени RC-цепи можно уменьшать по сравнению со случаем, когда датчик возбуждают только с двух краев. Полное сопротивление самого плохого случая для этих реализаций, например, может наблюдаться в центре линии, а не на каком-либо из краев. Эта точка может возбуждаться двумя линиями половины полной длины, или двумя параллельными резисторами со значением R/2, или (R/2)/2=R/4. Емкость может быть неизменной для этих реализаций. Возбуждая таким образом линии с обоих концов, вместо возбуждения только с одного конца, постоянную времени можно уменьшать в четыре раза, и может происходить увеличение частоты отсечки линии в четыре раза.
В одной из реализаций эта конфигурация для генерации коэффициента четыре может быть достигнута с помощью подключения двух концов дорожки к проводящему (например, медному) проводу, и направляя эту дорожку полностью вокруг датчика.
Фиг. 3 изображает пример схемы 300, включающей в себя передатчики, имеющие соответствующую логику управления для возбуждения напряжений по линиям матрицы. Схема 300 включает в себя идентичные копии той же самой схемы на любом конце линий 320 и логику управления для их возбуждения с помощью идентичных колебательных сигналов. D-триггеры скомпонованы в сдвиговых регистрах, таких как сдвиговый регистр 350. Схема включает в себя передатчики, причем каждый имеет длинный высоковольтный сдвиговый регистр, с одним выходом на столбец, и высоковольтную (HV) схему 330 возбуждения для возбуждения соответствующей линии 320 ITO. Отдельный сдвиговый регистр 350 соединяется с каждой стороной матрицы, и две цепи сдвиговых регистров обеспечены теми же самыми логическими вводами 340, 345, так, чтобы их выводы следовали с фиксированным шагом.
На фиг. 3 схема является симметричной, и соединительные линии могут необязательно быть разрезаны 360 в середине. С помощью этой симметрии схемы на любой стороне идентичны, и напряжения на любой стороне разреза могут быть равными, и ток может не течь через данную точку, независимо от того, есть или нет разрез. Ошибка в возбуждающей схеме, например, может приводить к электрическому току, если дорожки остались соединенными, и два конца возбуждаются противоположными напряжениями. Но эта ошибка в возбуждающей схеме вряд ли может произойти, и сопротивление соединительной линии может быть достаточно большим, так что ток может быть ограничен безопасным значением в любом случае. Если бы соединительные линии были разрезаны, и дефект разомкнутой цепи произошел где-нибудь на протяжении дорожки, то участок этой соединительной линии был бы неработоспособен. Если бы соединительную линию оставили соединенной, то даже с одним дефектом разомкнутой цепи вся длина соединительной линии осталась бы соединенной, хотя одна из линий могла быть намного длиннее другой (и длиннее половины всей длины), в зависимости от того, где произошел дефект. Практически, решение о том, разрезать линии или нет, может быть произвольным для этого типа симметричной реализации.
Реализации могут также использоваться для корреляции с различным колебательным сигналом (например, с различной фазой) для каждого пересечения, согласно ожидаемой задержке по RC-линиям. Некоторые реализации могут выполнять корреляцию с множеством колебательных сигналов одновременно.
Фиг. 4 изображает пример схемы, включающей в себя передатчики и приемники для возбуждения напряжений и восприятия токов по линиям матрицы. Фиг. 4 показывает симметричную конструкцию для схемы 400 и в направлении столбцов, и в направлении строк. Схема 400 имеет по меньшей мере один передатчик 403 на каждой строке 407 и по меньшей мере один приемник 405 на каждом столбце 409. В частности, схема 400 имеет два передатчика 403, 413 на каждой строке 407 и по меньшей мере один приемник 405 или 419 на каждой линии 409 или 429. В верхней половине схемы 400 ток от передатчика 410 может быть принят только верхними приемниками. В нижней половине схемы 400 ток от передатчика 420 может быть принят только нижними транзисторами.
На стороне приемника соединительная линия разрезана в середине, и вывод приемника каждой половины может обрабатываться отдельно. Эта реализация предоставляет возможность одновременно возбуждать два передатчика, пока их столбцы находятся на противоположных сторонах от разреза, так как они будут обрабатываться различными наборами приемников. В результате все столбцы можно сканировать с двойным быстродействием, за исключением тех, которые очень близко к разрезу. Эта реализация может также удваивать частоту кадров, обеспечивая тот же самый временной интервал интеграции, или может удваивать временной интервал интеграции при заданной одинаковой частоте кадров.
Фиг. 5 изображает пример трехмерного (3D) сетчатого графика 500 измеренной емкости 520 относительно местоположений 510 по матрице на поверхности датчика прикосновения. На трехмерном сетчатом графике 500 ось Z представляет измеренную базовую емкость, а ось X и ось Y представляют позиции в матрице на поверхности датчика прикосновения. Когда интенсивность принятого сигнала скоррелирована для каждого пересечения на графике 500, интенсивность принятого сигнала уменьшается по длинным линиям матрицы. График 500 показывает, например, что существует экспоненциальное падение интенсивности 530 принятого сигнала в зависимости от позиции из-за затухания в соединительных RC-линиях. График 500 включает в себя изменения измеренной емкости, которые могут быть обусловлены шумом или некоторым другим механическим изменением в сборке.
Колебательные сигналы передачи с кодовым разделением (по сравнению с временным разделением)
Методики и реализации описаны для матрицы емкостного восприятия прикосновения, которая имеет передатчики и приемники, причем передатчики могут передавать ортогональные колебательные сигналы, и каждый приемник может выполнять корреляцию отдельно с каждым переданным колебательным сигналом.
В некоторых реализациях проводят измерение интенсивности принятого сигнала, который скоррелирован с ожидаемым колебательным сигналом, которая пропорциональна емкости в матрице. Отношение сигнал/шум этого измерения может быть функцией от временного интервала интеграции, причем более длительные временные интервалы интеграции могут использоваться для достижения более высоких отношений сигнал/шум. В некоторых реализациях колебательные сигналы возбуждения могут быть ортогональны друг другу и передаваться одновременно, а в других реализациях колебательные сигналы возбуждения могут быть ортогональны друг другу, а так же к шуму, и передаваться одновременно.
В некоторых реализациях способ улучшения отношения сигнал/шум в емкостном датчике прикосновения состоит в увеличении временного интервала интеграции. Энергия принятого сигнала может увеличиться линейно с этим временем, в то время как энергия, принятая из-за случайного шума, увеличивается только как квадратный корень. Поскольку частота кадров системы также масштабируется с временным интервалом интеграции, может существовать компромисс между частотой кадров и ОСШ. Могут быть выполнены другие реализации, которые могут одновременно активизировать множество передатчиков, используя кодовое разделение вместо временного разделения.
Фиг. 6A и 6B изображают схемы примеров колебательных сигналов для передатчиков. Фиг. 6A имеет колебательные сигналы с возбуждением, предусматривающим мультиплексирование с временным разделением, и фиг. 6B имеет колебательные сигналы с возбуждением, предусматривающим мультиплексирование с кодовым разделением. Например, фиг. 6A показывает передатчики 625, 630, 635, 640, причем эти передатчики имеют колебательные сигналы 620, которые разделены по времени друг относительно друга (например, мультиплексирование с временным разделением). Например, передатчик 630 имеет последовательность колебательных сигналов [0, 0, 1, -1, 0, 0, 0, 0], причем график 615 напряжения в зависимости от времени показывает, что цифровое значение 1 представляет напряжение выше 0 В, цифровое значение -1 представляет напряжение ниже 0 В, а цифровое значение 0 представляет 0 В. Передатчик 625 имеет последовательность колебательных сигналов [1, -1, 0, 0, 0, 0, 0, 0], передатчик 635 имеет последовательность колебательных сигналов [0, 0, 0, 0, 1, -1, 0, 0], и передатчик 640 имеет последовательность колебательных сигналов [0, 0, 0, 0, 0, 0, 1, -1]. Для этой реализации в любой момент времени только один из этих колебательных сигналов является ненулевым, так что они ортогональны.
Фиг. 6B показывает передатчики 675, 680, 685, 690, причем эти передатчики имеют колебательные сигналы 670, которые ортогональны друг относительно друга, но причем в любой момент времени множество передатчиков могут передавать ненулевое напряжение (например, мультиплексированное с кодовым разделением). Например, передатчик 690 имеет последовательность колебательных сигналов [1, -1, -1, 1, -1, 1, 1, -1], причем график 665 напряжения в зависимости от времени показывает, что цифровое значение 1 представляет напряжение выше 0 В, цифровое значение -1 представляет напряжение ниже 0 В, а цифровое значение 0 представляет 0 В. Передатчик 675 имеет последовательность колебательных сигналов [1, -1, 1, -1, 1, -1, 1, -1], передатчик 680 имеет последовательность колебательных сигналов [-1, 1, 1, -1, -1, 1, 1, -1], и передатчик 685 имеет последовательность колебательных сигналов [-1, 1, -1, 1, 1, -1, 1, -1]. Хотя на фиг. 6B показана закодированная с помощью манчестерского кода последовательность Адамара, последовательность не ограничена этим типом последовательности. В общем случае может использоваться любая ортогональная последовательность. В некоторых реализациях, например, ортогональная последовательность может использоваться для модуляции более одного цикла несущей для сужения полосы пропускания сигнала.
В реализациях, аналогичных фиг. 6B, передатчики передают ортогональные колебательные сигналы, и каждый приемник, вместо выполнения только одной корреляции, выполняет корреляцию отдельно с каждым переданным колебательным сигналом. Ортогональные колебательные сигналы в общем случае можно генерировать в любом числе реализаций. Например, (почти) ортогональные шумоподобные коды можно генерировать, используя последовательные циклические сдвиги последовательности сдвигового регистра максимальной длины. Некоторые реализации могут предусматривать классы кодов, которые могут использоваться при множественном доступе с кодовым разделением каналов (CDMA), или ортогональные чистые тоны (например, немодулированные несущие на одной постоянной частоте) можно эффективно генерировать и демодулировать с помощью быстрого преобразования Фурье (FFT), как при ортогональном мультиплексировании с частотным разделением каналов (OFDM).
Одной из основных причин передачи одновременно по множеству столбцов является увеличение полной переданной энергии, и таким образом - улучшение ОСШ с помощью увеличения уровня сигнала, в то время как шум остается неизменным. Другой, хотя несколько менее важной, причиной является использование широкополосного кодового слова, которое может использоваться в присутствии узкополосного аддитивного шума.
Хотя эти коды ортогональны за полный период (то есть интеграл от 0 до T code_1(t)*code_2(t)=0), они не обязательно ортогональны за более короткие периоды (то есть этот интеграл в течение некоторого более короткого времени не обязательно является нулевым). Это может подразумевать, что очень краткое касание или движение пальца пользователя в течение периода интеграции может вызывать ложные корреляции с другими кодами, существенно поднимая минимальный уровень шума системы. Этот эффект может стать более существенным, когда увеличивают временной интервал интеграции и когда увеличивают число одновременных кодов. Это может фактически ограничивать временной интервал интеграции, что может ограничивать приемлемое число одновременных кодов.
Реализации описанной методики передачи могут поэтому применяться частично. В некоторых реализациях передача может происходить одновременно на небольшом числе столбцов, вместо передачи только на одном столбце за раз (например, традиционная система только с временным разделением), или по всем столбцам одновременно (например, простая система CDMA). Например, если в матрице существуют 90 столбцов, то эти столбцы можно возбуждать в парах, и кадры могут делиться на 45 временных интервалов интеграции. В другом примере столбцы можно возбуждать тройками (например, по три за один раз), и кадр может делиться на 30 временных интервалов интеграции. С помощью одновременной передачи только на меньшем числе столбцов период интеграции сохраняют достаточно коротким, так что палец пользователя почти неподвижен в течение этого периода, и ложная корреляция не происходит.
Колебательные сигналы с временным разделением для этой методики могут быть ортогональны по любому интервалу, например, а не только в течение полного периода колебательных сигналов. Это может означать, что движение пальца пользователя во время измерения может вести себя как ожидают, только посредством взвешивания каждого принятого колебательного сигнала согласно количеству времени, когда палец пользователя находился в соответствующем местоположении датчика или около него.
Некоторые реализации для определения ортогональных колебательных сигналов возбуждения могут предусматривать выбор первой частоты для модуляции, генерацию псевдошумовой последовательности около первой частоты, генерацию несущего сигнала для псевдошумовой последовательности и модуляцию некоторого числа циклов несущего сигнала около первой частоты с псевдошумовой последовательностью. Первая частота может быть в общем случае приблизительно 100 кГц, и причем число несущих сигналов, например, меньше десяти. Если электрический шум из источника вне датчика присутствует в узком диапазоне известных частот (например, частота горизонтального обновления LCD или рабочая частота флуоресцентной лампы подсветки с холодным катодом), то все колебательные сигналы возбуждения могут разрабатываться так, чтобы они были ортогональны к этим частотам шума. В некоторых реализациях генерация колебательного сигнала, который ортогонален к некоторой частоте шума, может зависеть по меньшей мере и от частоты модуляции, и от основного псевдошумового кода.
В некоторых реализациях, если электрический шум из источника вне датчика присутствует в узком диапазоне частот, но точные частоты неизвестны, то эти частоты могут быть измерены, и колебательные сигналы возбуждения могут выбираться адаптивно во время выполнения так, чтобы они были ортогональны к измеренным источникам шума. Частоты шума можно определять, например, с помощью поддержания большинства или всех передатчиков на постоянном выходном напряжении, и измеряя спектр сигнала, который приходит на приемники. Это измерение может повторяться, например, в интервале, соответствующем скорости, с которой неизвестная частота, как ожидают, будет изменяться, или выполняться непрерывно и усредняться с постоянной времени, которая соответствует скорости, с которой неизвестная частота, как ожидают, будет изменяться.
Локальное улучшение отношения сигнал/шум
Описаны методики и реализации для локального улучшения отношения сигнал/шум в емкостном датчике прикосновения с помощью выборочного сканирования.
В некоторых применениях может быть полезно знать не только когда пользователь касается датчика, но также и когда пользователь собирается коснуться датчика (например, когда пользователь держит свой палец в пределах нескольких миллиметров от датчика, но не касается его). Наличие возможности обнаруживать это состояние иногда упоминается как состояние «наведения».
Описаны методики для измерения «наведения», используя только стандартную дифференциальную емкость. Например, методики могут предусматривать измерение «наведения», поддерживая надлежащую частоту кадров для целевой характеристики касания (например, приблизительно 120 Гц), и усредняя во временной области выходные корреляции для создания менее скоростного и с меньшим шумом сигнала для состояния «наведения». Методики могут также предусматривать пространственное усреднение посредством свертки изображения каждого кадра с помощью ядра, размера ожидаемой характеристики. Например, когда пользователь касается матрицы, пользователь может, например, создавать пятно приблизительно 10 мм в диаметре. Когда пользователь отводит свой палец от матрицы, интенсивность этого пятна может уменьшаться, но диаметр пятна может увеличиваться. Таким образом уменьшенная пространственная разрешающая способность может быть приемлемой для этого примера.
Могут существовать другие методики для улучшения шумовой характеристики с помощью выбора некоторых элементов передачи в течение дополнительного временного интервала интеграции. Например, может существовать начальное сканирование матрицы для определения, что элементы датчика в (3, 5) и (8, 2) выше порогового состояния для обнаружения состояния «наведения» (например, порогового значения «наведения»), но пороговое значение «наведения» может быть очень близко к минимальному уровню шума, что может вызывать ложное срабатывание. Чтобы избежать вызова ложного срабатывания, столбцы 5 и 2 могут сканироваться в течение дополнительного интервала, и эти результаты могут усредняться с исходными данными для улучшения отношения сигнал/шум для этих кандидатов. Если улучшенное измерение все еще выше порогового значения «наведения», то данное измерение может быть сообщено, иначе измерение может быть отброшено. Частота кадров может незначительно ухудшиться, пока касаются или выполняют «наведение» только небольшой части столбцов в заданное время. В некоторых других реализациях, когда существует меньше приемников, чем строк, приемники можно также мультиплексировать с временным разделением с помощью выбранных строк.
Другие методики могут использоваться только для касания, например, при условии, что размер экрана является слишком большим для полного сканирования, чтобы возвращать данные с приемлемым ОСШ и частотой кадров. Возможно, например, сканировать весь экран с коротким временным интервалом интеграции, и затем повторно сканировать только те столбцы, в которых касания, возможно, присутствовали, согласно начальному сканированию. Также возможно, например, сканировать те столбцы, в которых касания присутствовали в предыдущем кадре, с более длительным временным интервалом интеграции, и сканировать остальную часть матрицы с более коротким временным интервалом интеграции, или даже реже, чем один раз за кадр (например, в структуре с чередованием). Из-за этих подходов начальное касание может иметь немного увеличенную задержку, но уменьшенную задержку на последующих кадрах.
Фиг. 7A и 7B изображают графики примеров временных диаграмм для кадров и субкадров. Фиг. 7A и 7B показывают методики локального улучшения ОСШ с помощью выборочного сканирования, что включает в себя выполнение сканирование всего датчика в структуре с чередованием (например, с чередованием 1:4, с полными кадрами приблизительно с частотой 30 Гц и субкадрами приблизительно с частотой 120 Гц), сканируя те столбцы, у которых были касания последний кадр, с полным быстродействием (для задержки системы на 120 Гц после касания пользователем).
Фиг. 7A показывает схему примера сканирования с частотой сканирования 30 Гц для кадра 715 с четырьмя субкадрами 720, 725, 730, 735, имеющими частоту субкадра 120 Гц. Фиг. 7A показывает, что существует 16 столбцов на кадр с четырьмя столбцами на субкадр и четырьмя субкадрами на кадр. Сканирование на фиг. 7A показывает структуру с чередованием без касаний.
Фиг. 7B показывает схему примера сканирования при частоте сканирования 30 Гц для кадра 765 с четырьмя субкадрами 770, 775, 780, 785, имеющими частоту субкадра 120 Гц. Фиг. 7B показывает, что существует 16 столбцов на кадр с четырьмя столбцами на субкадр и четырьмя субкадрами на кадр. Сканирование на фиг. 7B показывает структуру с чередованием с касанием в столбце 4, причем столбцы 3, 4 и 5 всегда сканируют для увеличения задержки. В некоторых реализациях задержка системы может составлять приблизительно 120 Гц после касания ее пользователем.
Фиг. 8A изображает последовательность операций примера способа 810 сканирования всего кадра датчика. Фиг. 8A показывает способ 810 как способ с чередованием 4:1, причем первый набор выбираемых столбцов сканируются, и столбцы сканируются из списка выполненных касаний в данный момент, и второй набор выбираемых столбцов сканируются, и другие столбцы сканируются из списка выполненных касаний в данный момент. Способ предусматривает сканирование столбцов 0, 4, 8... (805) и сканирование столбцов из списка (810) «выполненных касаний в данный момент». Затем сканируют столбцы 1, 5, 9.. (815), сканируют столбцы из списка (820) «выполненных касаний в данный момент», затем сканируют столбцы 2, 6, 10... (825), сканируют столбцы из списка (830) «выполненных касаний в данный момент», и затем сканируют столбцы 3, 6, 11... (835) и сканируют столбцы из списка (840) «выполненных касаний в данный момент». В этом способе 810 первый набор выбираемых столбцов включает в себя столбцы от 0 до n, причем n - целое число, и столбцы, которые выбраны, включают в себя каждый четвертый столбец между столбцом 0 и столбцом n; второй набор выбираемых столбцов включает в себя столбцы от 0 до n, и причем столбцы, которые выбраны, включают в себя каждый четвертый столбец между столбцом 1 и столбцом n; третий набор выбираемых столбцов включает в себя столбцы от 0 до n, и причем столбцы, которые выбраны, включают в себя каждый четвертый столбец между столбцом 2 и столбцом n; и четвертый набор выбираемых столбцов включает в себя столбцы от 0 до n, и причем столбцы, которые выбраны, включают в себя каждый четвертый столбец между столбцом 3 и столбцом n.
Фиг. 8B изображает последовательность операций примера способа 850 сканирования одного столбца датчика. Способ 810 предусматривает сканирование всех строк в активном столбце одновременно (855), очистку бита «выполненное касание в данный момент» для этого столбца (860), и затем выполнение другого способа 880, который может предусматривать повторение некоторых считываний и измерений для каждой строки в столбце (или последовательно, или параллельно). Считывания и измерения предусматривают способ 880 для считывания измерений для строки i (865), и если измерение ниже базового значения, то устанавливают бит «выполненное касание в данный момент» для этого столбца (870). Различные сканируемые столбцы на фиг. 8A и 8B могут иметь множество сканирований и их принятые сигналы усредняют. Объединенное ОСШ может быть выше, чем ОСШ для одного сканирования.
Разработка колебательного сигнала передачи для помехоустойчивости
Описаны методики и реализации для обеспечения помехоустойчивости в переданном колебательном сигнале для матрицы емкостного восприятия прикосновения.
Если датчик прикосновения используется и/или реализован сверху LCD, то преобладающий источник шума, вероятно, будет получен от работы LCD. Например, LCD может иметь около 1000x1000 пикселей, может работать с частотой приблизительно 100 кадров в секунду, и может иметь частоту сканирования строк, которая поэтому около (100 кадров/с)*(1000 строк/кадр)=100 000 строк/сек, или 100 кГц. Это может быть весьма примечательно для больших устройств отображения, таких как для телевизор с плоским экраном и большие мониторы. Это может быть близко к частоте возбуждения емкостного датчика прикосновения и может поэтому рассматриваться как внутриполосный «шум». В некоторых из этих реализаций частота возбуждения может быть выбрана таким образом, что колебательный сигнал возбуждения ортогонален к частоте сканирования строк LCD за период интеграции, в течение которого частота сканирования строк LCD включает в себя сигнал, который является преобладающим источником «шума».
В некоторых реализациях, если передаваемый колебательный сигнал - немодулированная несущая, то пара частот может быть выбрана, используя тот же самый или аналогичный процесс, который используется для выбора пары частот для ортогональной частотной манипуляции (OFSK). Например, частоты f и 2f могут быть ортогональны за период 1/f, независимо от их относительных фаз. Если LCD имеет частоту сканирования строк 100 кГц, то сканирование матрицы может выполняться или с 50 кГц, или с 200 кГц, и период интеграции может быть выбран как кратное или 20 мкс, или 10 мкс. Шум около частоты сканирования строк в таком случае полностью устранен. Более сложные колебательные сигналы могут быть разработаны в частотной области и затем преобразованы с помощью преобразования Фурье, или разработаны, используя те же самые алгоритмы, как при выборе коэффициентов фильтра c конечной импульсной характеристикой (FIR) для конкретной частотной характеристики. Так как корреляция происходит в цифровой области, она может устранять шум, только если цифровые сигналы являются приблизительно точным представлением аналогового тока в строке. Если ADC насыщается, например, то этого не будет происходить, и все шумы могут не быть устранены. Для решения проблемы насыщения ADC, усиление до ADC может быть выбрано так, чтобы преобразователь не насыщался с максимальным или самым высоким ожидаемым уровнем шума и максимальным или самым высоким уровнем сигнала.
Некоторые другие реализации могут предусматривать размещение режекторного фильтра в принимающем тракте для устранения частоты шума. Это может устранять шум, но если колебательный сигнал возбуждения все еще имеет энергию около этой частоты, то этот компонент переданного сигнала может быть устранен с помощью приемника. Это может подразумевать, что энергия, используемая для передачи этого компонента сигнала, не используется. Некоторые альтернативные реализации могут разрабатывать переданный сигнал в частности так, чтобы он не имел компонента на частоте шума, что может предоставить возможность системе полностью использовать ее передаваемую мощность, устраняя шум.
Для этого подхода может быть удобно, если частота шума известна заранее, что в общем случае происходит для LCD. Например, LCD может работать с постоянной частотой следования пикселей и постоянными привязками по времени, которые не зависят от привязки по времени входного сигнала, и можно повторно дискретизировать входной сигнал, чтобы он работал в пределах своего внутреннего масштаба времени. Но если частота шума неизвестна заранее по некоторым причинам, или если необходимо устранить некоторый другой узкополосный источник шума от внешней среды, тогда реализации могут предусматривать адаптивный выбор колебательного сигнала передачи, согласно спектру шума, измеренного на приемниках. В некоторых реализациях пороговые значения для обнаружения касания могут выбираться адаптивно, согласно величине принятого шума, так, чтобы если окружающий шум высокий, пороговое значение для обнаружения касания можно было увеличивать, и вероятность вызова ложного касания можно было уменьшать.
Фиг. 9 изображает график примера «шума» на выходе аналогового входного блока системы перед выполнением демодуляции. График 900 включает в себя пример колебательного сигнала 915 напряжения для шума напряжения по отношению к времени. Колебательный сигнал 915 напряжения включает в себя по меньшей мере два аддитивных компонента: стохастический компонент 920, соответствующий источникам случайного шума, и детерминированный компонент 930, соответствующий частоте горизонтального обновления LCD. Схема 900 предусматривает шум, полученный из смоделированного примера.
Фиг. 10 изображает график примера шума после выполнения демодуляции с хорошим выбором колебательного сигнала возбуждения. График 1000 показывает колебательный сигнал 1015 принятого шума по отношению к времени. Ось Y колебательного сигнала 1015 может быть в произвольных единицах измерения в соответствии с выводом ADC, так как в данном случае рассматривают его относительное значение (то есть ОСШ). Шум появляется без видимой детерминированной структуры, и, кажется, состоит только из стохастического компонента 1010. Величина шума является небольшой (например, приблизительно 4 среднеквадратичных значения (RMS)). Схема 1000 предусматривает шум, взятый из примера измеренных данных.
Фиг. 11 изображает график примера шума после выполнения демодуляции с плохим выбором колебательного сигнала возбуждения. График 1100 показывает колебательный сигнал 1115 принятого шума по отношению к времени. Ось Y колебательного сигнала 1115 измеряется в тех же самых произвольных единицах, как на фиг. 10. Шум в колебательном сигнале 1115 предусматривает по меньшей мере два аддитивных компонента: стохастический компонент, соответствующий источникам случайного шума, и детерминированный компонент 1110, который возникает из-за побочной частоты горизонтального обновления LCD после демодуляции. Величина шума на фиг. 11 больше (например, приблизительно 20 RMS), чем на фиг. 10. График 1100 предусматривает шум, полученный из примера измеренных данных.
Фиг. 12 изображает график примера корреляции частоты шума с частотой возбуждения за период интеграции. График 1200 показывает колебательный сигнал 1215, аналогичный функции «кардинального синуса», взаимной корреляции между шумом и частотами возбуждения за период интеграции, причем оптимальный выбор хороших частот возбуждения происходит в провалах 1210 колебательного сигнала 1215. Ось Y графика была нормализована к значению, равному единице, когда шум и частоты возбуждения равны. В колебательном сигнале 1215 частота шума составляет 135 кГц, и период интеграции - 6 циклов частоты возбуждения.
В некоторых примерных реализациях на некоторых панелях LCD импульс широкополосного шума может генерироваться в течение небольшой части всего времени кадра. Например, для одной 55” панели на 120 Гц широкополосный шум может генерироваться в течение приблизительно 150 мкс из кадра, равного 8,3 мс. Этот шум может появляться на изображении измеренной емкости как набор особенно шумных столбцов, так как кадр является кадром с временным разделением по столбцам. Эти шумные столбцы могут двигаться в пределах изображения емкости, например, с тактовой частотой между частотой кадров LCD и частотой кадров емкостного датчика прикосновения. Если LCD и датчик прикосновения имеют частотную синхронизацию, то местоположение шумных столбцов может быть постоянным. Если LCD и датчик прикосновения имеют синхронизацию по фазе, то местоположение этих шумных столбцов может быть идентифицировано, и измерение может быть остановлено в течение этого времени. Это может немного уменьшать доступный временной интервал интеграции, но может улучшать шумовую характеристику в самом плохом случае. Система может осуществлять синхронизацию по фазе с помощью непосредственного соединения частоты следования пикселей LCD и сигналов синхронизации (например, разрешение передачи данных DE). Если эта методика для синхронизации по фазе невозможна, то система может осуществлять синхронизацию по фазе, просматривая измеренные данные и идентифицируя столбцы с наибольшим шумом. Система управления может затем корректировать частоту кадров так, чтобы поместить столбцы с наибольшим шумом в необходимую или целевую позицию. В данной методике не требуется соединение с модулем LCD.
Некоторые реализации могут передавать многочисленные ортогональные колебательные сигналы возбуждения одновременно, например, посредством использования методик, аналогичных методикам CDMA. Такие реализации могут иметь возможность выбирать все колебательные сигналы возбуждения, чтобы они были ортогональны к частоте шума. Частота шума может быть известна заранее, и колебательные сигналы возбуждения могут разрабатываться так, чтобы они были ортогональны к этой известной частоте. Если частота шума не известна заранее, то частота шума может быть измерена, используя приемники, и колебательные сигналы возбуждения можно выбирать, например, адаптивно выбирать.
Напряжение возбуждения
Шумовая характеристика системы в общем случае может быть определена, например, с помощью отношения сигнал / шум в приемнике. Как описано выше, улучшать ОСШ могут различные методики, которые включают в себя корреляцию с правильным ожидаемым колебательным сигналом, когда допустимая принятая энергия извлекается из сигнала, и выбор колебательного сигнала, ортогонального к шуму, для уменьшения полного принятого шума. Другой методикой улучшения ОСШ может быть увеличение мощности передачи. Например, небольшие емкостные датчики прикосновения (например, с размером по диагонали приблизительно 4”) могут работать при стандартном логическом напряжении (например, приблизительно 3,3 В, или немного выше), а большие экраны воспринимающие прикосновения (например, с размером по диагонали приблизительно 15” или больше) могут работать, например, приблизительно при напряжении 10-20 В. Поскольку ОСШ можно масштабировать с помощью напряжения, некоторые реализации могут улучшать ОСШ при наличии системы, которая работает с максимальным напряжением передачи, равным, например, 200 В. Это может увеличивать испускаемое излучение, которое может быть уменьшено, например, с помощью ограничения скорости нарастания выходного напряжения для быстрых краев, или модулируя переданный сигнал с помощью шумоподобного (например, широкополосного) кода. Это может также увеличивать ток через пользователя, но этот ток может быть, например, не больше десятков мкА. Этот ток может быть намного меньше порога чувствительности, который может быть приблизительно 10 мА на представляющих интерес частотах. Поскольку порог чувствительности увеличивается с частотой, когда чувствительность изменяется от покалывания (из-за взаимодействия с нервами) к нагреванию (из-за I^2*R нагрева плоти), высокая частота может даже предоставлять возможность увеличения максимального приемлемого тока через пользователя. Дополнительно, если только один столбец сканируется за один раз, и пользователь касается только небольшого числа столбцов, то средний ток дополнительно уменьшается. Это может подразумевать, например, что если пользователь касается 3 столбцов в датчике на 100 столбцов, то средний ток может быть 3/100 максимального тока.
Аналоговый входной блок
Описаны методики и реализации для разработки аналоговых входных схем для системы емкостного восприятия прикосновения.
Фиг. 13 изображает график примера выходных характеристик из однокаскадного входного усилителя и двухкаскадного входного усилителя. График 1300 показывает амплитудную характеристику 1320 однокаскадного усилителя и амплитудную характеристику 1330 двухкаскадного усилителя. Первый и второй каскады усилителей - входные усилители с усилением приблизительно 1 В/мкА, использующие операционные усилители 10 МГц усиление*полоса пропускания, и нагруженные однородной RC-линией с полной емкостью C=800 пФ и сопротивлением R=5 кОм. Амплитудная характеристика 1320 однокаскадного усилителя имеет нежелательное образование пика 1310 в усилении, что соответствуют затухающим колебаниям во временной области.
Некоторые реализации входных усилителей могут сначала не пытаться использовать все трансимпендансное усиление, потому что это может мешать сохранять усилитель устойчивым с большой емкостью с «землей» на входе. Эти реализации могут использовать сначала небольшое трансимпендансное усиление, и за этим небольшим трансимпендансным усилением следует усиление по напряжению для улучшения производительности. Начальное трансимпендансное усиление может быть выбрано достаточно большим таким образом, чтобы шум устройства и другой шум этого первого каскада не преобладал, так как этот шум будет усилен усилением по напряжению второго каскада. Например, если полный шум, который может относиться к выходу второго каскада, как ожидают, будет около 100 мВ RMS, и второй каскад имеет усиление 10 В/В, тогда первый каскад может иметь шум устройства (и шум от других источников шума, который включает в себя шум, связанный с источниками питания, например) значительно меньше 10 мВ.
Фиг. 14A изображает схему примера двухкаскадной входной схемы усилителя. В схеме 1400A первый усилитель IC1A имеет эталонное напряжение VREF на неинвертирующем входном терминале 3, и ввод IΝ0 на инвертирующем входном терминале 2, причем первый конденсатор Cf обратной связи и первый резистор Rf обратной связи подключены между инвертирующим входным терминалом 2 и выходным терминалом 1 усилителя IC1A. Выходной терминал 1 последовательно подключен с конденсатором Ca, который последовательно подключен с резистором Ra. Второй усилитель IC1B имеет неинвертирующий терминал 5, подключенный к эталонному напряжению VREF, и инвертирующий терминал 6, подключенный к резистору Ra. Второй конденсатор Cb обратной связи и второй резистор Rb обратной связи подключены между инвертирующим входным терминалом 6 и выходным терминалом 7 второго усилителя IC1B.
Реализация на фиг. 14A может включать в себя высококачественный строго аналоговый входной блок, использующий линейные усилители. Эта конфигурация может поддерживать входное напряжение очень близко к постоянному значению и может обеспечивать существенную емкость по отношению к «земле». На фиг. 14A строка датчика может быть подключена к входу IN0. Эта конструкция может иметь трансимпендансный усилитель с усилением, определяемым посредством Rf и Cf. Этот усилитель 1400A можно расценивать как интегратор с усилением (в единицах В/А) 1/(s*Cf), где s=j*2*pi*f является частотой входного сигнала. Резистор Rf может быть выбран так, чтобы сделать постоянную времени Rf*Cf быстрее периода интеграции для остановки дрейфа интегратора на входе. Например, с частотой возбуждения приблизительно 100 кГц эта постоянная времени может быть около (2,2 нФ)*(2,2k)=4,8 мкс, что быстрее периода 10 мкс. В комбинации с конденсатором в матрице датчика эта конфигурация может по существу сформировать делитель напряжения, так, если напряжение передачи - Vt, и емкость тестируемого датчика - Cut, то усилитель IC1A может выводить напряжение Vt*Cut/Cf.
С помощью использования меньшего трансимпендансного усиления, и после него - усиления по напряжению, передаточная функция замкнутой системы может быть устойчивой, и можно избежать затухающих колебаний или колебаний даже в присутствии большой емкости по отношению к «земле» на входе (как произойдет, когда дорожки будут длинными в больших устройствах отображения, например, когда значения могут быть в сотнях пФ). В некоторых реализациях начальное трансимпендансное усиление может быть выбрано достаточно большим, чтобы шум операционного усилителя и любой связанный шум в пределах схемы приемника был незначительным по сравнению с полным шумом системы.
В некоторых реализациях, например, шум устройства и другой шум усилителя IC1A могут быть самым важным источником шума, сгенерированного в пределах системы, так как этот шум усиливается с помощью усиления усилителя IC1B. В одном из примеров конструкции это может соответствовать емкости Cf около 2,2 нФ, сопротивлению Rf около 1,5 кОм и усилению по напряжению Rb/Ra около 20. В некоторых реализациях конденсатор Ca может быть выбран для создания очень небольшого усиления на частоте около 60 Гц, причем у шума, связанного с пальцем пользователя, может быть амплитуда в десять или больше раз больше, например, чем амплитуда сигнала.
Фиг. 14B изображает последовательность операций примера для разработки входного усилителя с надлежащими значениями емкости и сопротивления для стабильности. В способе последовательности операций 1400 параметры включают в себя необходимое полное усиление G, в котором единицы измерения могут быть в единицах емкости, и полную емкость Cin на входе усилителя, которая может быть смоделирована как емкость соединительных линий ITO в датчике. Другие параметры включают в себя частоту f возбуждения (или среднюю частоту для широкополосного сигнала возбуждения, например, для псевдошумовой последовательности), и ожидаемый полный шум In системы, который может быть связан с LCD, в единицах тока, и может относиться к вводу аналогового входного блока.
Способ предусматривает выбор Cf, сопоставимой с общей входной емкостью Cin (1420), и выбор Rf около той же самой величины полного сопротивления, как Cf на представляющей интерес частоте, например, Rf=1/(2*pi*f*Cf) (1425). Способ предусматривает выбор соотношения Rb/Ra, которое равно необходимому/целевому усилению, деленному с помощью усиления первого каскада, например, Cf/G (1430), и разработку первого каскада с полным шумом по напряжению Vn (интегрированного по полосе пропускания системы), так что In/(2*pi*f*G)>>(Rb/Ra)*Vn (1435). Способ также предусматривает выбор Ca для ослабления около 500:1 на частоте 60 Гц, так, чтобы емкость Ca=1/((Ra*500)*(60 Гц)*2*pi) (1440). Затем способ предусматривает выбор Cb для ослабления около 10:1 на частоте 10*f, так, чтобы емкость Cb=1/((Rb/10)*(10*f)*2*pi) (1445).
Некоторые из описанных вариантов осуществления объекта изобретения и операций могут воплощаться в цифровых электронных схемах или в компьютерном программном обеспечении, встроенном программном обеспечении, или в аппаратном обеспечении, которые включают в себя структуры, раскрытые в данном описании, и их структурных эквивалентах, или в комбинациях одного или большего количества из них. Варианты осуществления объекта изобретения, описанного в данном описании, могут воплощаться как одна или большее количество компьютерных программ, то есть как один или большее количество модулей инструкций компьютерной программы, закодированных на компьютерном носителе данных для исполнения с помощью устройства обработки данных или для управления его работой. В качестве альтернативы или дополнительно, инструкции программы могут быть закодированы в искусственно сгенерированном распространяемом сигнале, например в машинно-генерируемом электрическом, оптическом или электромагнитном сигнале, который сгенерирован для кодирования информации для передачи на соответствующее устройство приемника для исполнения с помощью устройства обработки данных. Устройство обработки данных может включать в себя датчик, может быть частью датчика, может быть частью системы с датчиком, может быть интегрировано в систему и/или датчик, может быть частью приемников, передатчиков, компонентов и/или логических схем, связанных с датчиком или приемниками и/или передатчиками, или любой их комбинацией. Компьютерный носитель данных может быть считываемым компьютером запоминающим устройством, считываемой компьютером запоминающей подложкой, массивом памяти или устройством произвольного или последовательного доступа или комбинацией одного или большего количества из них, или они могут включать его в себя. Кроме того, хотя компьютерный носитель данных не является распространяемым сигналом, компьютерный носитель данных может быть источником или адресатом инструкций компьютерной программы, закодированных в искусственно сгенерированном распространяемом сигнале. Компьютерный носитель данных может также быть одним или большим количеством отдельных физических компонентов или носителей (например, множества CD (компакт-дисков), дисков или других запоминающих устройств), или они могут включать его в себя.
Операции, описанные в данном описании, могут воплощаться как операции, выполняемые устройством обработки данных с данными, хранящимися на одном или большем количестве считываемых компьютером запоминающих устройствах, или принятыми из других источников.
Различные устройства, аппаратура и оборудование для обработки данных могут использоваться в качестве «устройства обработки данных», которые включают в себя для примера программируемый процессор, компьютер, систему на чипе или множество или комбинацию приведенного выше. Устройство может включать в себя специализированную логическую схему, например, FPGA (программируемую пользователем вентильную матрицу) или ASIC (специализированную интегральную схему). Устройство может также включать в себя в дополнение к аппаратному обеспечению код, который создает среду выполнения для рассматриваемой компьютерной программы, например, код, который составляет встроенное программное обеспечение процессора, стек протоколов, систему управления базой данных, операционную систему, межплатформенную среду выполнения, виртуальную машину или комбинацию одного или большего количества из них. Устройство и среда выполнения могут реализовать различные отличающиеся инфраструктуры моделей вычислений, такие как веб-службы, инфраструктуры распределенных вычислений и сетевых параллельных вычислений.
Компьютерная программа (также известная как программа, программное обеспечение, приложение, скрипт или код) может быть написана на языке программирования любой формы, которые включают в себя компилируемые или интерпретируемые языки, декларативные или процедурные языки, и она может использоваться в любой форме, что включает в себя использование в качестве автономной программы или в качестве модуля, компонента, подпрограммы, объекта или другого блока, подходящего для использования в вычислительной среде. Компьютерная программа может, но не обязательно, соответствовать файлу в файловой системе. Программа может храниться в части файла, который содержит другие программы или данные (например, один или большее количество скриптов, хранящихся в документе на языке разметки), в одном файле, выделенном для рассматриваемой программы, или во множестве скоординированных файлов (например, файлов, которые хранят один или большее количество модулей, подпрограмм или частей кода). Компьютерная программа может использоваться для выполнения на одном компьютере или на множестве компьютеров, которые расположены в одном месте или распределены по множеству мест и связаны сетью связи.
Процессы и логические алгоритмы, описанные в данном описании, могут выполняться с помощью одного или большего количества программируемых процессоров, которые выполняют одну или большее количество компьютерных программ для выполнения действий с помощью обработки входных данных и генерации выходных данных. Процессы и логические последовательности операций могут также выполняться с помощью специализированной логической схемы, например, FPGA (программируемой пользователем вентильной матрицы) или ASIC (специализированной интегральной схемы), и устройство может также воплощаться в качестве данной специализированной логической схемы.
Процессоры, подходящие для выполнения компьютерной программы, включают в себя, посредством примера, и обычные, и специализированные микропроцессоры, и любой один или большее количество процессоров цифрового компьютера любого вида. В общем случае процессор будет принимать инструкции и данные из постоянного запоминающего устройства или из оперативной памяти, или из них обоих. Основными элементами компьютера являются процессор для выполнения действий в соответствии с командами и одно или большее количество запоминающих устройств для хранения команд и данных. В общем случае компьютер будет также включать в себя одно или большее количество запоминающих устройств большой емкости для хранения данных, например, магнитные, магнитооптические диски или оптические диски, или функционально связан с ними для приема данных или передачи данных, или и то, и другое. Однако компьютер не обязательно должен иметь такие устройства. Кроме того, компьютер может быть внедрен в другое устройство, например, в мобильный телефон, карманный персональный компьютер (КПК), мобильный аудио- или видеоплеер, игровую приставку или переносное запоминающее устройство (например, флеш-накопитель, подключаемый к универсальной последовательной шине (USB)), если назвать только некоторые. Устройства, подходящие для хранения инструкций компьютерной программы и данных, включают в себя все формы энергонезависимых запоминающих устройств, носителей и запоминающих устройств, включающих в себя для примера полупроводниковые запоминающие устройства, например, СППЗУ (стираемое программируемое постоянное запоминающее устройство), ЭСППЗУ (электрически стираемое программируемое постоянное запоминающее устройство) и устройства флэш-памяти; магнитные диски, например, внутренние жесткие или сменные диски; магнитооптические диски; и диски CD-ROM и DVD-ROM. Процессор и запоминающее устройство могут быть дополнены специализированной логической схемой или внедрены в нее.
Для обеспечения взаимодействия с пользователем варианты осуществления объекта изобретения, описанного в данном описании, могут воплощаться на компьютере, имеющем устройство отображения, например, монитор CRT (с электронно-лучевой трубкой) или LCD (жидкокристаллическое устройство отображения), для отображения информации пользователю, и клавиатуру и указывающее устройство, например, мышь или шаровой манипулятор «трекбол», с помощью которого пользователь может обеспечивать ввод информации в компьютер. Устройства другого вида могут также использоваться для обеспечения взаимодействия с пользователем; например, обеспечиваемая пользователю обратная связь может быть сенсорной обратной связью любой формы, например, визуальной обратной связью, слуховой обратной связью или осязательной обратной связью; и вводимая пользователем информация может приниматься в любой форме, которая включает в себя звуковую, речевую или тактильную вводимую информацию. Кроме того, компьютер может взаимодействовать с пользователем с помощью передачи документов и приема документов от устройства, которое используется пользователем; например, с помощью передачи веб-страницы в веб-браузер на клиентском устройстве пользователя в ответ на запросы, принятые от веб-браузера.
Хотя данное описание содержит множество конкретных подробностей реализации, они не должны рассматриваться в качестве ограничения объема любого из изобретений или того, что может заявляться, а вместо этого - как описания признаков, определенных для конкретных вариантов осуществления конкретных изобретений. Некоторые признаки, которые описаны в данном описании в контексте отдельных вариантов осуществления, могут также воплощаться в комбинации в одном варианте осуществления. Наоборот, различные признаки, которые описаны в контексте одного варианта осуществления, могут также воплощаться в множестве вариантов осуществления отдельно или в любой соответствующей подкомбинации.
Кроме того, хотя признаки могут быть описаны выше как действие в некоторых комбинациях и даже первоначально заявляться таким образом, одни или большее количество признаков из заявленной комбинации могут в некоторых случаях быть удалены из комбинации, и заявляемая комбинация может быть ориентирована на подкомбинации или разновидности подкомбинаций.
Точно так же, хотя операции изображены на чертежах в конкретном порядке, это не должно пониматься как требование, чтобы такие операции выполнялись в определенном показанном порядке или в последовательном порядке, или чтобы все показанные операции были выполнены для достижения необходимых результатов. При некоторых обстоятельствах многозадачная и параллельная обработка может быть выгодной. Кроме того, разделение различных компонентов системы в описанных выше вариантах осуществления не должно пониматься, как требование такого разделения во всех вариантах осуществления, и нужно подразумевать, что описанные компоненты программы и системы могут в общем случае быть объединены вместе в одном программном продукте или укомплектованы в множество программных продуктов.
Таким образом, описаны конкретные варианты осуществления объекта изобретения. Другие варианты осуществления находятся в пределах последующей формулы изобретения. В некоторых случаях действия, описанные в формуле изобретения, могут быть выполнены в другом порядке и все равно обеспечивать необходимые результаты. Кроме того, процессы, изображенные на сопроводительных фигурах, не обязательно требуют конкретного показанного порядка или последовательного порядка для достижения необходимых результатов. В некоторых реализациях многозадачная и параллельная обработка может быть полезной.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЕМКОСТНЫЙ ДАТЧИК КАСАНИЯ, ИМЕЮЩИЙ КОРРЕЛЯЦИЮ С ПРИЕМНИКОМ | 2011 |
|
RU2597519C2 |
| Устройство для тестирования электродов | 2013 |
|
RU2606938C2 |
| ОПРЕДЕЛЕНИЕ МЕСТОПОЛОЖЕНИЯ ЭЛЕКТРОСТАТИЧЕСКОГО ПЕРА В ПРЕДЕЛАХ ЕМКОСТНОГО ДАТЧИКА КАСАНИЯ | 2011 |
|
RU2565517C2 |
| СИСТЕМА ДЛЯ ЭЛЕКТРОСТАТИЧЕСКОГО ПЕРА В ЕМКОСТНОМ ДАТЧИКЕ КАСАНИЯ | 2011 |
|
RU2574417C2 |
| СИСТЕМЫ ОПОЗНАВАНИЯ КАСАНИЯ | 2010 |
|
RU2540806C2 |
| РАДИОКОМПЛЕКС РОЗЫСКА МАРКЕРОВ | 1994 |
|
RU2108596C1 |
| Устройство для обнаружения неоднородности тонкого объекта, имеющей резкие границы, и способ его применения | 2019 |
|
RU2721099C1 |
| ТЕХНОЛОГИИ ИЗМЕРЕНИЯ СИЛЫ И ДЕЙСТВИТЕЛЬНО ЕМКОСТНОГО КАСАНИЯ ДЛЯ ЕМКОСТНЫХ ДАТЧИКОВ КАСАНИЯ | 2011 |
|
RU2575475C2 |
| РАЗОМКНУТЫЙ ПРЕКОДИРУЮЩИЙ ЦИКЛ В MIMO-СВЯЗИ | 2008 |
|
RU2452129C2 |
| ДИСПЛЕЙНОЕ УСТРОЙСТВО И СПОСОБ ДЛЯ ВОЗБУЖДЕНИЯ ДИСПЛЕЙНОГО УСТРОЙСТВА | 2008 |
|
RU2443071C1 |

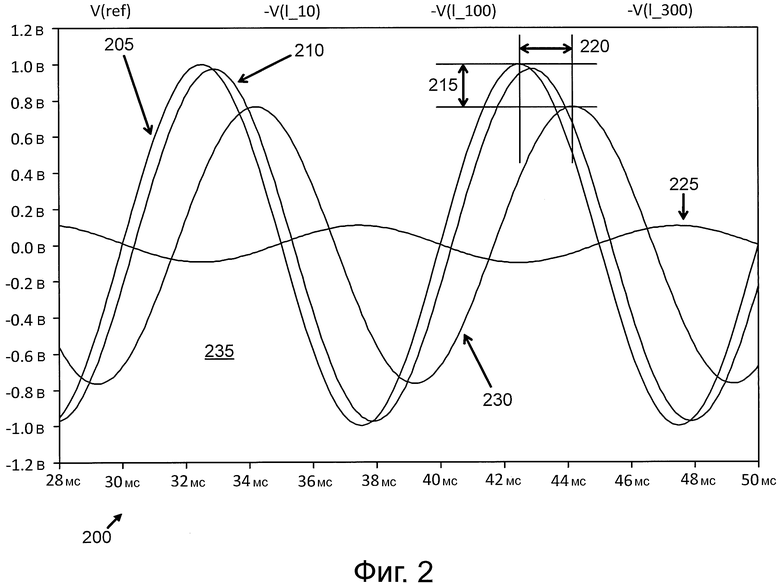
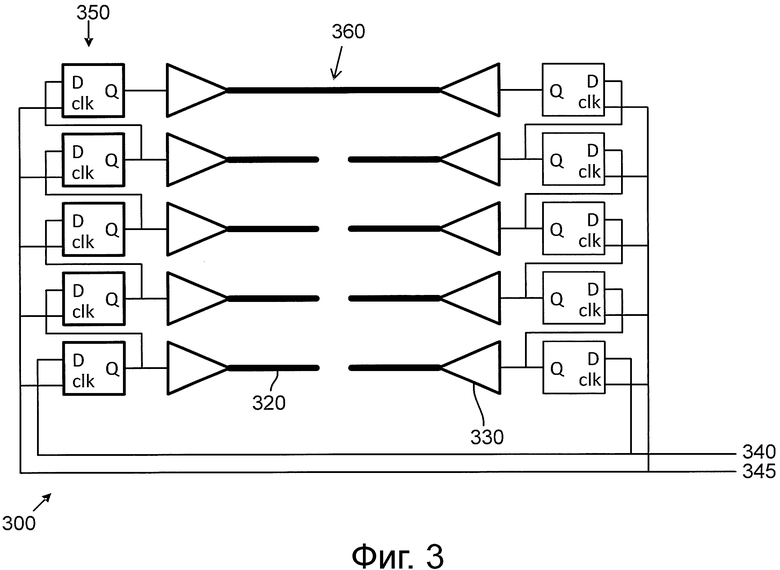
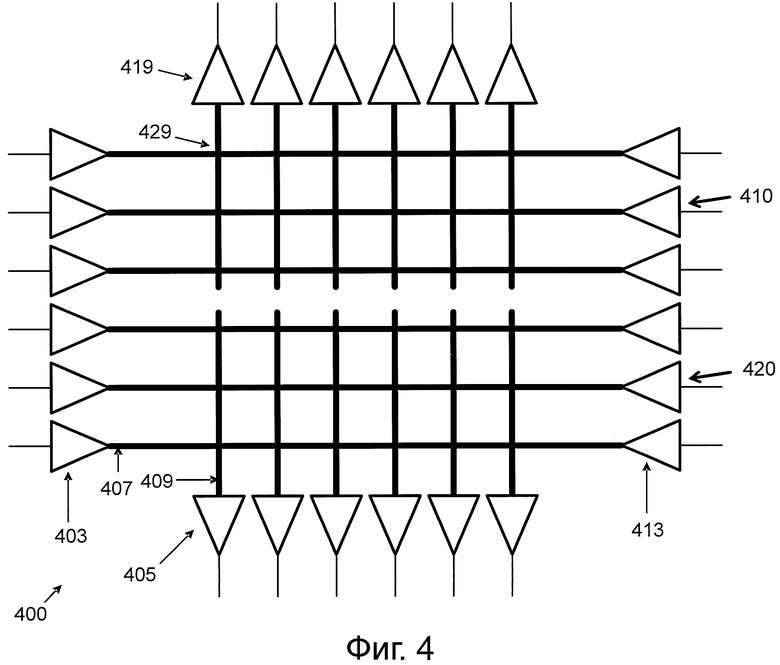

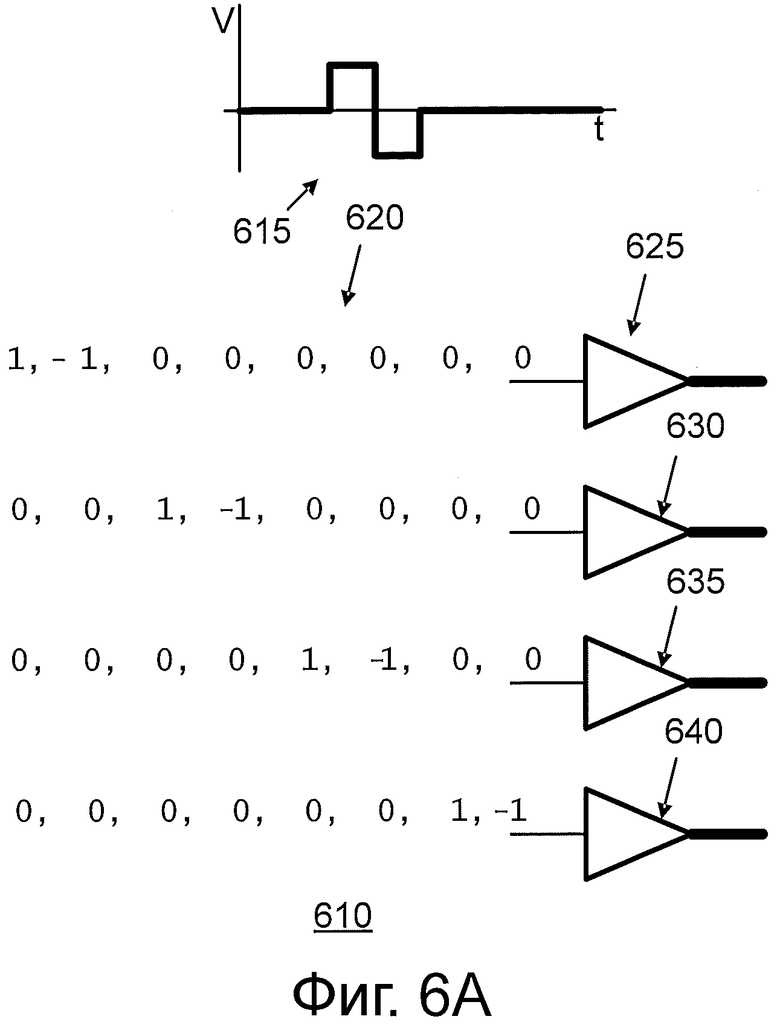
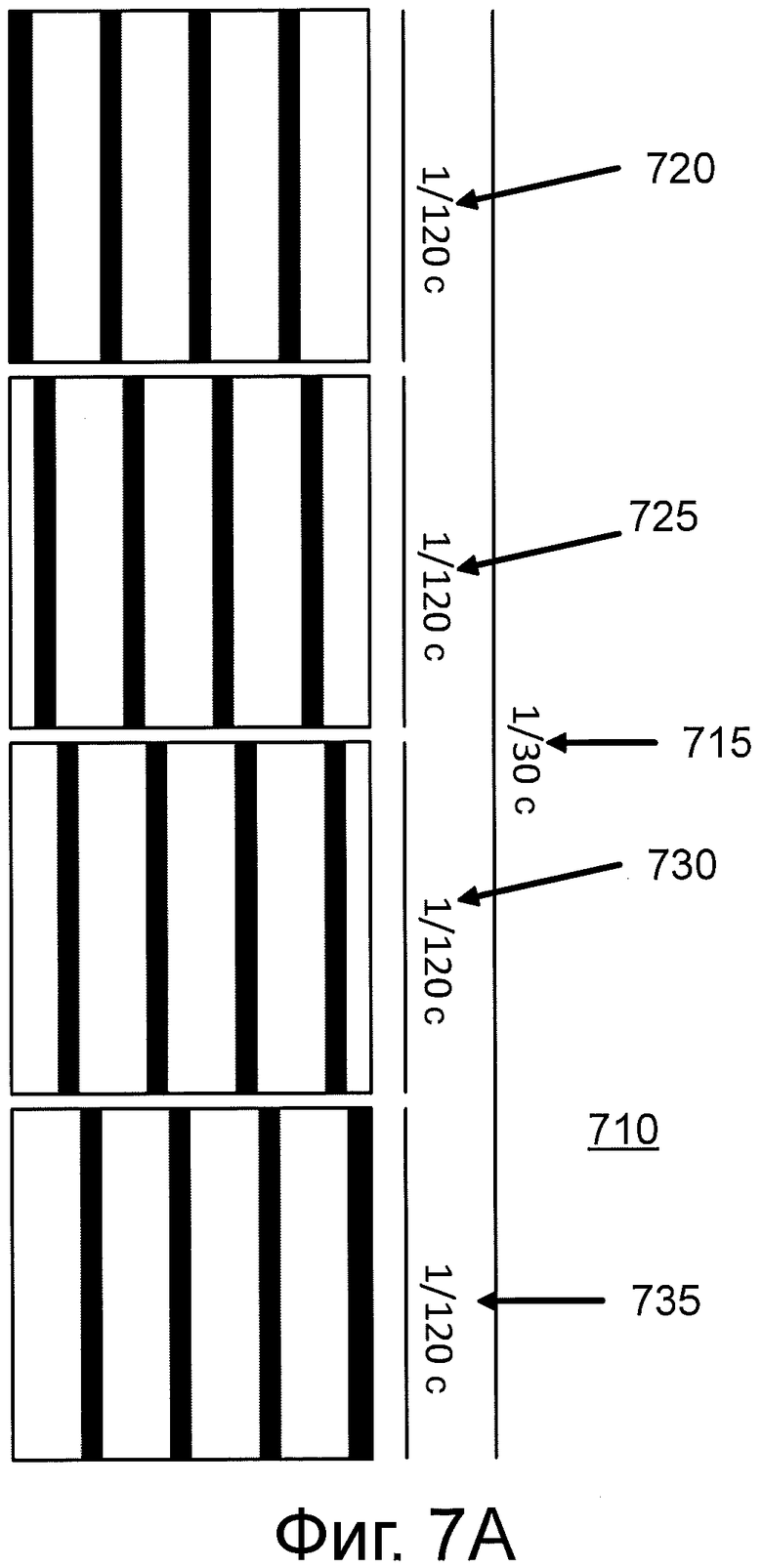

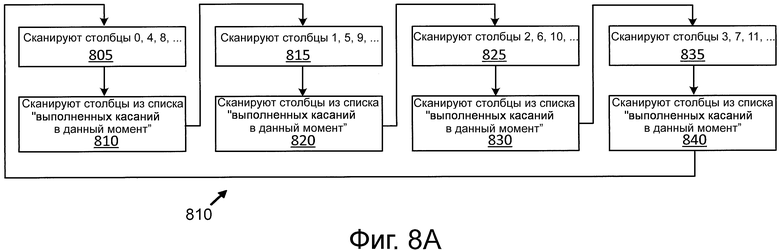


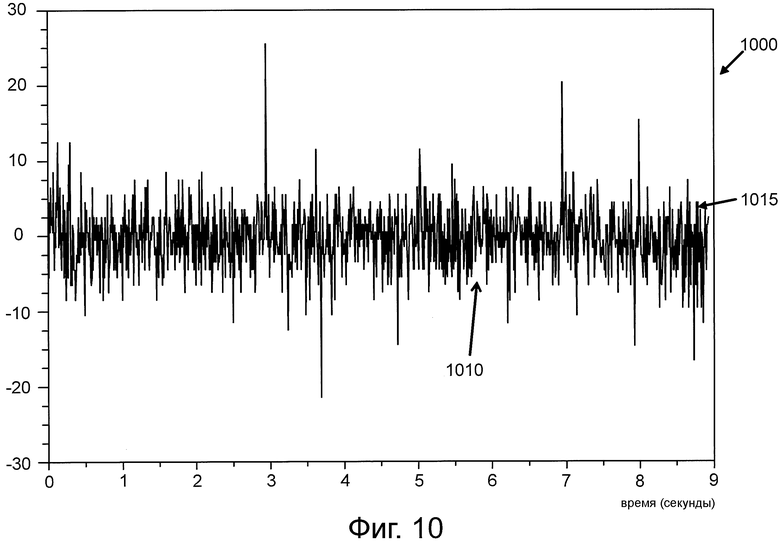
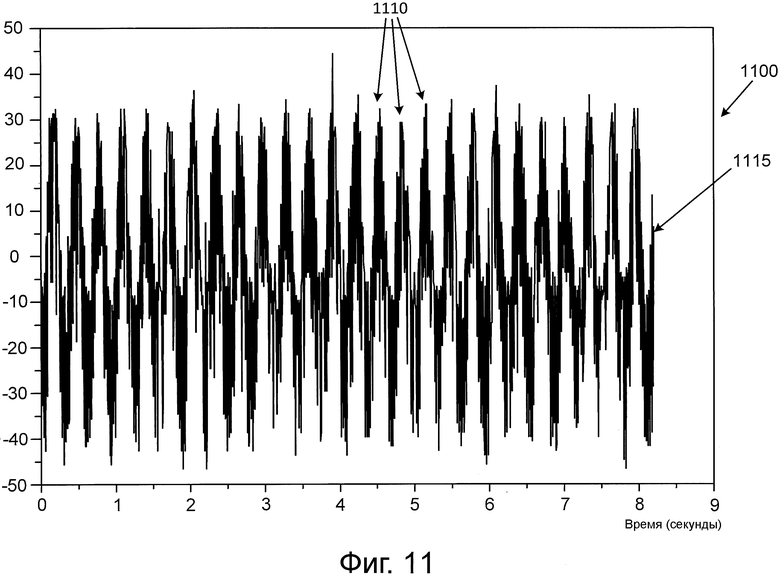



Изобретение относится к области устройств ввода информации и может быть использовано для улучшения отношения сигнал/шум емкостных датчиков прикосновения. Заявлены способы, системы и устройство, которые включают в себя компьютерные программы, закодированные на компьютерном носителе данных, для методик цифровой обработки сигналов (DSP) в общем случае для улучшения отношения сигнал/шум (ОСШ) емкостных датчиков прикосновения. Технический результат - улучшение отношения сигнал/шум емкостных датчиков прикосновения. 3 н. и 29 з.п. ф-лы, 18 ил. 
1. Способ, выполняемый устройством обработки данных, связанным с датчиком, данный датчик содержит множество соединительных линий, ориентированных в матричной конфигурации, входной интерфейс, множество передатчиков, соединенных с входным интерфейсом, и множество приемников, причем соответствующие передатчики соответствуют и соединены с первым местоположением соответствующих соединительных линий и соответствующие приемники соединены со вторым местоположением соответствующих соединительных линий, данный способ содержит этапы, на которых:
определяют ортогональные колебательные сигналы возбуждения, имеющие ортогональную последовательность колебательных сигналов, причем ортогональные колебательные сигналы возбуждения ортогональны друг другу;
одновременно передают на каждом по меньшей мере из двух передатчиков один из ортогональных колебательных сигналов возбуждения таким образом, что по меньшей мере два передатчика сконфигурированы для передачи соответствующих ортогональных последовательностей колебательных сигналов, причем передача происходит меньше чем на всех передатчиках в датчике;
принимают по меньшей мере два ортогональных колебательных сигнала возбуждения по меньшей мере в двух из приемников, причем каждый по меньшей мере из двух ортогональных колебательных сигналов возбуждения принимают в одном из соответствующих приемников;
принимают информацию по меньшей мере для ожидаемого принятого колебательного сигнала; и
для каждого по меньшей мере из двух приемников выполняют корреляцию принятого колебательного сигнала возбуждения с ожидаемым принятым колебательным сигналом.
2. Способ по п. 1, в котором датчик содержит емкостный датчик прикосновения, причем ортогональные колебательные сигналы возбуждения ортогональны к шуму в датчике.
3. Способ по п. 1, в котором матричная конфигурация содержит n столбцов соединительных линий и в котором каждая одновременная передача передатчиков происходит в течение временного интервала интеграции, данный способ дополнительно содержит определение некоторого числа временных интервалов интеграции в качестве функции от некоторого числа одновременных передач по меньшей мере от двух передатчиков.
4. Способ по п. 1, в котором датчик сконфигурирован так, чтобы он был расположен физически близко к жидкокристаллическому устройству отображения, чтобы по меньшей мере иметь возможность взаимодействовать с жидкокристаллическим устройством отображения, причем жидкокристаллическое устройство отображения имеет частоту строчной развертки, которая составляет приблизительно от 30 кГц до 135 кГц.
5. Способ по п. 1, дополнительно содержащий этап, на котором выполняют мультиплексирование с кодовым разделением, причем каждая соединительная линия в группе из четырех соединительных линий содержит отличающийся код для ортогональных последовательностей колебательных сигналов.
6. Способ по п. 5, в котором мультиплексирование с кодовым разделением содержит закодированную с помощью манчестерского кода последовательность Адамара.
7. Способ по п. 1, в котором определение ортогональных колебательных сигналов возбуждения содержит этапы, на которых:
выбирают первую частоту для модуляции;
генерируют псевдошумовую последовательность около первой частоты;
генерируют несущий сигнал для псевдошумовой последовательности; и
модулируют некоторое число циклов несущего сигнала около первой частоты псевдошумовой последовательностью.
8. Способ по п. 7, в котором первая частота составляет приблизительно 100 кГц и в котором число несущих сигналов меньше десяти.
9. Способ по п. 7, дополнительно содержащий этапы, на которых:
идентифицируют частоту, связанную с шумом в датчике; и
выбирают по меньшей мере один из ортогональных колебательных сигналов возбуждения так, чтобы он был ортогонален к частоте, связанной с шумом.
10. Способ по п. 1, в котором определенные ортогональные колебательные сигналы возбуждения являются функцией от частоты для модуляции и псевдошумовой последовательности на частоте для модуляции.
11. Способ по п. 1, дополнительно содержащий этапы, на которых:
получают спектр шума, связанный с датчиком;
проводят измерение шума в датчике с помощью оценки спектра шума, связанного с датчиком;
идентифицируют шум, основываясь на оценке спектра шума; и
определяют ортогональные колебательные сигналы возбуждения, делая ортогональные колебательные сигналы возбуждения ортогональными к идентифицированному шуму в датчике.
12. Способ по п. 11, дополнительно содержащий этапы, на которых:
продолжают проводить измерение для идентификации шума, который ортогонален к ортогональным колебательным сигналам возбуждения, с помощью идентификации шума из источника наибольшего шума в спектре шума за период времени; и
адаптивно определяют ортогональные колебательные сигналы возбуждения посредством использования шума, связанного с источником наибольшего шума, который непрерывно идентифицируют в спектре шума.
13. Способ по п. 11, дополнительно содержащий этапы, на которых:
периодически проводят измерение для идентификации шума, который ортогонален к ортогональным колебательным сигналам возбуждения, идентифицируя шум из источника наибольшего шума в спектре шума; и
адаптивно определяют ортогональные колебательные сигналы возбуждения посредством использования шума, связанного с источником наибольшего шума, который периодически идентифицируют в спектре шума.
14. Способ по п. 11, в котором идентифицированный шум связан с рабочей частотой флуоресцентной лампы подсветки с холодным катодом или с частотой, связанной с жидкокристаллическим устройством отображения.
15. Способ по п. 1, в котором датчик содержит емкостный датчик прикосновения, данный емкостный датчик прикосновения содержит входную схему, данный способ дополнительно содержит этапы, на которых:
подготавливают входное напряжение для передачи на выходе входной схемы для емкостного датчика прикосновения, входная схема содержит по меньшей мере двухкаскадную схему с первым каскадом, сконфигурированным для создания трансимпендансного усиления, и вторым каскадом, сконфигурированным для создания усиления по напряжению, причем подготовка входного напряжения содержит этапы, на которых:
создают трансимпендансное усиление в первом каскаде входной схемы с помощью конфигурирования первого каскада в качестве схемы интегратора;
генерируют выходной сигнал в первом каскаде, выполняя деление входного напряжения; и
усиливают выходной сигнал первого каскада входной схемы усилением по напряжению второго каскада входной схемы для создания выходного сигнала для второго каскада входной схемы,
причем первый каскад содержит шум на таком уровне шума, что выходной сигнал для второго каскада входной схемы включает в себя шум первого каскада, усиленный с помощью функции усиления по напряжению второго каскада, и шум в выходном сигнале второго каскада меньше шума датчика, который получен из частоты жидкокристаллического устройства отображения или рабочей частоты флуоресцентной лампы подсветки с холодным катодом, и
причем передаточная функция замкнутой системы входной схемы является устойчивой.
16. Система, содержащая:
датчик, причем данный датчик содержит:
множество соединительных линий, ориентированных в матричной конфигурации,
входной интерфейс,
множество передатчиков, соединенных с входным интерфейсом, и
множество приемников,
причем соответствующие передатчики соответствуют и соединены с первым местоположением соответствующих соединительных линий и соответствующие приемники соединены со вторым местоположением соответствующих соединительных линий,
данная система сконфигурирована для:
определения ортогональных колебательных сигналов возбуждения, имеющих ортогональную последовательность колебательных сигналов, и причем ортогональные колебательные сигналы возбуждения ортогональны друг другу;
одновременной передачи на каждом по меньшей мере из двух передатчиков одного из ортогональных колебательных сигналов возбуждения таким образом, что по меньшей мере два передатчика сконфигурированы для передачи соответствующих ортогональных последовательностей колебательных сигналов, причем передача происходит меньше чем на всех передатчиках в датчике;
приема по меньшей мере двух ортогональных колебательных сигналов возбуждения по меньшей мере в двух из приемников, причем каждый по меньшей мере из двух ортогональных колебательных сигналов возбуждения принимают в одном из соответствующих приемников;
приема информации по меньшей мере для ожидаемого принятого колебательного сигнала; и
для каждого по меньшей мере из двух приемников выполнения корреляции принятого колебательного сигнала возбуждения с ожидаемым принятым колебательным сигналом.
17. Система по п. 16, в которой датчик содержит емкостный датчик прикосновения, причем ортогональные колебательные сигналы возбуждения ортогональны к шуму в датчике.
18. Система по п. 16, в которой матричная конфигурация содержит n столбцов соединительных линий и в которой система сконфигурирована таким образом, что каждая одновременная передача передатчиков происходит в течение временного интервала интеграции, и система дополнительно сконфигурирована для определения некоторого числа временных интервалов интеграции в качестве функции от некоторого числа одновременных передач по меньшей мере от двух передатчиков.
19. Система по п. 16, в которой датчик сконфигурирован так, чтобы он был расположен физически близко к жидкокристаллическому устройству отображения, чтобы по меньшей мере иметь возможность взаимодействовать с жидкокристаллическим устройством отображения, причем жидкокристаллическое устройство отображения имеет частоту строчной развертки, которая составляет приблизительно от 30 кГц до 135 кГц.
20. Система по п. 16, в которой система сконфигурирована для выполнения мультиплексирования с кодовым разделением, причем каждая соединительная линия в группе из четырех соединительных линий содержит отличающийся код для ортогональных последовательностей колебательных сигналов.
21. Система по п. 20, в которой мультиплексирование с кодовым разделением содержит закодированную с помощью манчестерского кода последовательность Адамара.
22. Система по п. 16, в которой система сконфигурирована для определения ортогональных колебательных сигналов возбуждения с помощью:
выбора первой частоты для модуляции;
генерации псевдошумовой последовательности около первой частоты;
генерации несущего сигнала для псевдошумовой последовательности; и
модуляции некоторого числа циклов несущего сигнала около первой частоты с псевдошумовой последовательностью.
23. Система по п. 22, в которой первая частота составляет приблизительно 100 кГц и в которой число несущих сигналов меньше десяти.
24. Система по п. 22, в которой система сконфигурирована для:
идентификации частоты, связанной с шумом в датчике; и
выбора по меньшей мере одного из ортогональных колебательных сигналов возбуждения так, чтобы он был ортогонален к частоте, связанной с шумом.
25. Система по п. 16, в которой определенные ортогональные колебательные сигналы возбуждения являются функцией от частоты для модуляции и псевдошумовой последовательности на частоте для модуляции.
26. Система по п. 16, в которой система сконфигурирована для:
получения спектра шума, связанного с датчиком;
проведения измерения шума в датчике с помощью оценки спектра шума, связанного с датчиком;
идентификации шума, основываясь на оценке спектра шума; и
определения ортогональных колебательных сигналов возбуждения, делая ортогональные колебательные сигналы возбуждения ортогональными к идентифицированному шуму в датчике.
27. Система по п. 26, в которой система сконфигурирована для:
продолжения проведения измерения для идентификации шума, который ортогонален к ортогональным колебательным сигналам возбуждения, с помощью идентификации шума из источника наибольшего шума в спектре шума за период времени; и
адаптивного определения ортогональных колебательных сигналов возбуждения посредством использования шума, связанного с источником наибольшего шума, который непрерывно идентифицируют в спектре шума.
28. Система по п. 26, в которой система сконфигурирована для:
периодического проведения измерения для идентификации шума, который ортогонален к ортогональным колебательным сигналам возбуждения, с помощью идентификации шума из источника наибольшего шума в спектре шума; и
адаптивного определения ортогональных колебательных сигналов возбуждения посредством использования шума, связанного с источником наибольшего шума, который периодически идентифицируют в спектре шума.
29. Система по п. 26, в которой система содержит флуоресцентную лампу подсветки с холодным катодом или жидкокристаллическое устройство отображения, причем идентифицированный шум связан с рабочей частотой флуоресцентной лампы подсветки с холодным катодом или с частотой, связанной с жидкокристаллическим устройством отображения.
30. Система по п. 16, в которой датчик содержит емкостный датчик прикосновения, причем емкостный датчик прикосновения содержит входную схему и система дополнительно сконфигурирована для выполнения этапов, на которых:
подготавливают входное напряжение для передачи на выходе входной схемы для емкостного датчика прикосновения, причем входная схема содержит по меньшей мере двухкаскадную схему, причем первый каскад сконфигурирован для создания трансимпендансного усиления, а второй каскад сконфигурирован для создания усиления по напряжению, причем подготовка входного напряжения содержит этапы, на которых:
создают трансимпендансное усиление в первом каскаде входной схемы с помощью конфигурирования первого каскада в качестве схемы интегратора;
генерируют выходной сигнал на первом каскаде с помощью выполнения деления входного напряжения; и
усиливают выходной сигнал первого каскада входной схемы усилением по напряжению второго каскада входной схемы для создания выходного сигнала для второго каскада входной схемы,
причем первый каскад содержит шум на таком уровне шума, что выходной сигнал для второго каскада входной схемы включает в себя шум первого каскада, усиленный с помощью функции усиления по напряжению второго каскада, и шум в выходном сигнале второго каскада меньше шума датчика, который получен из частоты жидкокристаллического устройства отображения или рабочей частоты флуоресцентной лампы подсветки с холодным катодом, и
причем передаточная функция замкнутой системы входной схемы является устойчивой.
31. Система, содержащая:
датчик, причем данный датчик содержит:
множество соединительных линий, ориентированных в матричной конфигурации,
входной интерфейс,
множество передатчиков, соединенных с входным интерфейсом, и
множество приемников,
причем соответствующие передатчики соответствуют и соединены с первым местоположением соответствующих соединительных линий и соответствующие приемники соединены со вторым местоположением соответствующих соединительных линий,
средство для определения ортогональных колебательных сигналов возбуждения, имеющих ортогональную последовательность колебательных сигналов, и причем ортогональные колебательные сигналы возбуждения ортогональны друг другу;
средство для одновременной передачи на каждом по меньшей мере из двух передатчиков одного из ортогональных колебательных сигналов возбуждения таким образом, что по меньшей мере два передатчика сконфигурированы для передачи соответствующих ортогональных последовательностей колебательных сигналов, причем передача происходит меньше чем на всех передатчиках в датчике;
средство для приема по меньшей мере двух ортогональных колебательных сигналов возбуждения по меньшей мере в двух приемниках, причем каждый по меньшей мере из двух ортогональных колебательных сигналов возбуждения принимают в одном из соответствующих приемников;
средство для приема информации по меньшей мере для ожидаемого принятого колебательного сигнала; и
для каждого по меньшей мере из двух приемников средство для корреляции принятого колебательного сигнала возбуждения с ожидаемым принятым колебательным сигналом.
32. Способ по п. 1, в котором датчик содержит емкостный датчик прикосновения, причем ортогональные колебательные сигналы возбуждения ортогональны к шуму в датчике.

