Изобретение относится к области летательных аппаратов (самолетов, крылатых и оперенных ракет, вертолетов), в частности адаптивных, «умных» элементов их конструкций. Оно связано с совершенствованием методов и средств управления аэродинамическими нагрузками, управления летательным аппаратом, подавления вибраций, снижения шума за счет целесообразного изменения (адаптации) формы летательных аппаратов.
Современные транспортные самолеты близки к аэродинамическому совершенству как с точки зрения выбора их формы в плане, так и используемых аэродинамических профилей. Однако, если не предпринимать специальных мер, это совершенство достигается только на основном заданном (крейсерском) режиме полета. Особое значение приобретает режим взлета-посадки, на котором требуется предельно возможно поднять аэродинамическое качество самолета и минимизировать уровень его шума. Но не менее важно достижение высокой весовой отдачи конструкции, надежности и безопасности полета, в частности, по условиям аэроупругости при крейсерской и предельных скоростях полета летательных аппаратов.
Известен еще со времен братьев Райт способ управления аэродинамическими характеристиками самолета путем изменения в полете профилей несущей поверхности. Известны также конструкции бесщелевых средств механизации, предназначенных для решения этой задачи и реализации концепции ламинарного крыла. Достигается это целесообразным изменением в полете формы профиля крыла, например, как на самолете братьев Райт, - отгибанием гибкой задней кромки.
К примеру, в европейском проекте SADE 7-й рамочной европейской программы (SADE - SmArt High Lift DEvices for Next Generation Wing - «Умные» элементы механизации крыла следующего поколения) исследованы возможности того же способа управления с использованием оригинальных конструкций «умных» элементов механизации, предложенных в ряде стран.
Основной исследованный вариант «локального» управления профилем крыла - с помощью бесщелевого «умного» носка, предложенного специалистами DLR (Германия), базировался на использовании подкрепленной гибкой обшивки (1. Monner Н.Р. and Riemenschneider J., "Morphing high lift structures: Smart leading edge device and smart single slotted flap", Aerodays 2011, 30th March - 1st April 2011, Madrid, Spain.)
В числе исследованных способов «локального» управления профилем - управления носком крыла и закрылком - и устройств для их реализации в этом проекте были рассмотрены также основанные на так называемых SDS-конструкциях, или целесообразно деформируемых конструкциях. Каркас соответствующих элементов механизации, например «умного» носка, состоит из цепочки легко растяжимых, но жестких на изгиб и сдвиг «умных» ячеек, заполняемых эластомером. Существо этого способа представлено в следующих работах: 2. Амирьянц Г.А. Эластомерная армированная панель. Патент РФ №2070137, 1993; 3. Amiryants G. Adaptive Selectively Deformable Structures. Proceedings of 21-th ICAS Congress, Melbourne, 1998; 4. G.A. Amiryants G.A., Ishmuratov F.Z., Malyutin V.A., Timohin V.P. Selectively Deformable Structures for Design of Adaptive Wings "Smart" Elements. Proceedings of 27-th ICAS Congress, Nice, 2010.
Характерная особенность способа управления аэродинамическими характеристиками с помощью предложенных «умных» конструкций носка или закрылка состоит в возможности сильного, но локального изменения профиля, к примеру, плавного бесщелевого отклонения носка крыла на большие углы - десятки градусов. Это особенно важно для совершенствования профиля крыла на взлетно-посадочных режимах полета. Таким образом, становится возможным значительно повысить аэродинамическое качество, улучшить взлетно-посадочные характеристики самолета, снизить шум и вредные выбросы.
Недостаток подобных способов управления с использованием «умных» носков или закрылков состоит в локальности их воздействия, поскольку они ориентированы на управление относительно малой частью профиля несущей поверхности. Как следствие, их эффективность ограничена для решения более глобальных задач - более значительного изменения в распределении аэродинамических нагрузок. Для скоростных самолетов (а также лопастей вертолетов), подверженных явлениям аэроупругости (флаттер, реверс органов управления), особое значение приобретает возможность изменения не только (и не столько) профиля крыла, сколько существенного изменения распределения местных углов атаки по размаху крыла (или лопасти). Это необходимо для более масштабного управления аэродинамическими нагрузками - особенно на конце крыла и решения проблем прочности, подавления флаттера, снижения шума, повышения эффективности управления самолетом или вертолетом. Существенный недостаток бесщелевого «умного» носка - это также относительно низкая прочность гибкой обшивки на передней кромке крыла при ударе птицы.
Известна другая и наиболее близкая к предлагаемому изобретению разработка германских специалистов (DLR) совместно с партнерами из NASA, ONERA, JAXA. Ими разработан способ управления деформациями и распределением местных углов атаки по размаху лопасти винта вертолета на основе целесообразной деформации обшивки лопасти. 5. J. Riemenschneider. Active Twist Blades - Entwicklung der Hardware fur den Windkanal Institut fur Faserverbundleichtbau und Adaptornik DLR Braunschweig. 2013; 6. Breitbach E.J., Anchalt С., Monner H.P. Overview of adaptronics in aeronautical applications. Proceedings of IFASD Forum, 2001 (эта работа приведена в приложении).
Эффективность предложенных способа и реализующего его устройства, включающего, помимо обшивки кессона, лонжероны и нервюры, была продемонстрирована испытаниями динамически-подобной модели в аэродинамической трубе. Возможность достижения главной цели разработки - снижения уровня вибраций и шума достигается тем, что целесообразно деформируют специальную композиционную обшивку, связанную с лонжероном и опирающуюся на образующий профиль пенопластовый заполнитель. В такую обшивку с определенной ориентацией волокон, изготовленную в автоклаве, интегрированы специальные приводы с проводкой управления к ним. Предложенный авторами способ управления и конструкция устройства, ориентированные на деформацию не профиля, а кессона лопасти вертолета (или крыла самолета), наиболее близки к предлагаемому изобретению и могут служить его прототипом.
Ценная особенность прототипа - относительная простота способа и конструкции, отсутствие щелей, которые весьма перспективны для малоразмерных и микроразмерных летательных аппаратов. Недостаток - в том, что такие способ и устройство, особенно привлекательные для использования при относительно малых скоростях потока и для относительно гибких несущих поверхностей, не столь перспективны для применения на летательных аппаратах с более жесткими конструкциями, при больших скоростных напорах, больших перегрузках.
Перспективность предлагаемых технических решений состоит в том, что в отличие от прототипа они могут быть применены на крыльях (и лопастях) произвольной, в том числе и большой жесткости, в широком диапазоне изменения перегрузки, скоростных напоров летательных аппаратов.
Предлагаемыми изобретениями решается задача существенного, глобального изменения распределения местных углов атаки по размаху несущих поверхностей любой жесткости.
Технический результат заключается в повышении эффективности оперативного (с минимально возможным запаздыванием) управления аэродинамическими нагрузками, в рациональном решении на этой основе проблем флаттера, реверса органов управления, повышения надежности и весовой отдачи конструкции, снижения шума летательного аппарата.
Решение поставленной задачи и технический результат достигаются тем, что в способе управления упругими изгибными и крутильными деформациями несущей поверхности (крыла самолета или лопасти вертолета), включающем операцию деформирования кессона несущей поверхности, с помощью системы управления, снабженной чувствительными элементами, быстродействующими приводами и вычислителем, закручивают и изгибают в основном концевую часть несущей поверхности, при этом изменяют в соответствии с требованиями по прочности, аэродинамике и аэроупругости распределение местных углов атаки сечений и прогибов кессона по размаху несущей поверхности. Для этого изгибают передний и задний лонжероны - каждый в своей плоскости. Достигается это тем, что сжимают предпочтительно (но при необходимости и растягивают) пояса лонжеронов на участке деформируемой концевой части несущей поверхности с помощью предварительно натянутых продольных силовых упругих элементов, которые располагают вблизи полок лонжеронов, ориентированных соосно с направлением полок и не связанных с полками на деформируемой концевой части несущей поверхности. Продольные силовые упругие элементы соединяют с полками лонжеронов неподвижно в начале деформируемой концевой части несущей поверхности (например, с помощью штифта) и подвижно в ее конце, в месте расположения силового привода. С помощью этого силового привода регулируют расстояние между торцом полки соответствующего лонжерона и свободным подвижным в направлении, соосным с направлением полок, торцом соответствующего продольного силового упругого элемента.
Технический результат достигается также тем, что в зависимости от потребных знака и величины приращения прогибов или местных углов атаки сечений деформируемой концевой части несущей поверхности варьируют натяжение (но при необходимости и сжатие) каждого из предварительно натянутых продольных силовых упругих элементов. Причем варьируют так, что для уменьшения (увеличения) изгибных деформаций деформируемой концевой части в большей (на 5-20%) степени сжимают нижние (верхние) полки переднего (заднего) лонжеронов, нежели верхние (нижние) полки этих лонжеронов. Для уменьшения (увеличения) местного угла атаки деформируемой концевой части в большей (на 5-20%) степени уменьшают (увеличивают) сжатие верхнего (нижнего) пояса переднего лонжерона по сравнению со сжатием нижнего (верхнего) пояса переднего лонжерона и уменьшают (увеличивают) сжатие нижнего (верхнего) пояса заднего лонжерона по сравнению со сжатием верхнего (нижнего) пояса заднего лонжерона.
Технический результат достигается также тем, что в случае обрыва или отказа системы управления какого-либо из продольных силовых упругих элементов по сигналу соответствующего датчика сил отключают соответствующий привод и продолжают управлять упругими изгибными и крутильными деформациями деформируемой концевой части несущей поверхности за счет других продольных силовых упругих элементов, предпочтительно нижних, сообразно цели изменения деформаций полок переднего и заднего лонжеронов.
Для реализации предложенного способа предлагается устройство управления упругими изгибными и крутильными деформациями несущей поверхности (крыла или лопасти вертолета), содержащее лонжероны, нервюры, обшивку кессона. Внутри верхней и нижней полок переднего и заднего лонжеронов несущей поверхности на деформируемом участке концевой части несущей поверхности выполнено сквозное продольное отверстие. Внутри него, заполняя все пространство отверстия, размещен скользящий вдоль отверстия продольный силовой упругий элемент. В качестве такого элемента использован либо сплошной пруток, либо витой трос или трос, набранный из высокопрочных нитей, направленных вдоль оси сквозного продольного отверстия, с цилиндрической оплеткой. Этот продольный силовой упругий элемент жестко заделан в полке лонжерона в начале участка деформируемой концевой части несущей поверхности. Этот участок начинается на удалении от ее конца, составляющем 20-40% размаха несущей поверхности. Противоположный конец продольного силового упругого элемента, выходящий из отверстия в торце полки лонжерона, соединен с силовым приводом, закрепленным на торце полки лонжерона и связанным с торцом продольного силового упругого элемента, обеспечивающим возможность натяжения либо сжатия продольного силового упругого элемента требуемыми усилиями за счет соответствующего перемещения торцов продольных силовых упругих элементов относительно торцов полок, по сигналам датчика сил в соответствии с необходимой формой участка деформируемой концевой части несущей поверхности и напряженно-деформированным состоянием полок.
Технический результат достигается также тем, что передний и задний лонжероны несущей поверхности (крыла или лопасти вертолета) выполнены с минимальной собственной крутильной жесткостью. Достигается это благодаря тому, например, что они конструктивно связаны силовыми нервюрами, а также верхней и нижней панелями обшивки, воспроизводящими профиль несущей поверхности и воспринимающими аэродинамическую нагрузку, а верхняя и нижняя полки каждого из лонжеронов конструктивно связаны тонкостенной ферменной конструкцией, представляющей собой стенку с вырезами.
Технический результат достигается также тем, что верхняя и нижняя панели обшивки изготовлены из трехслойных, в частности, сотовых панелей с тонкой силовой обшивкой из ортотропного композиционного материала с направлением волокон по нормали к лонжеронам или вдоль лонжеронов.
Технический результат достигается также тем, что в качестве силового привода служит, например, пакетный пьезоэлектрический привод, привод с использованием сплавов с памятью формы, электро- или гидропривод.
Известные способы управления деформациями несущей поверхности и реализующие их устройства схематически представлены на следующих фигурах:
- на фиг. 1 - схема известного устройства для осуществления известного способа [1], включающая гибкую композитную обшивку 1, ее опорные элементы 2 и распределенные по размаху адаптивного «умного» носка привода 3 рычагов 4;
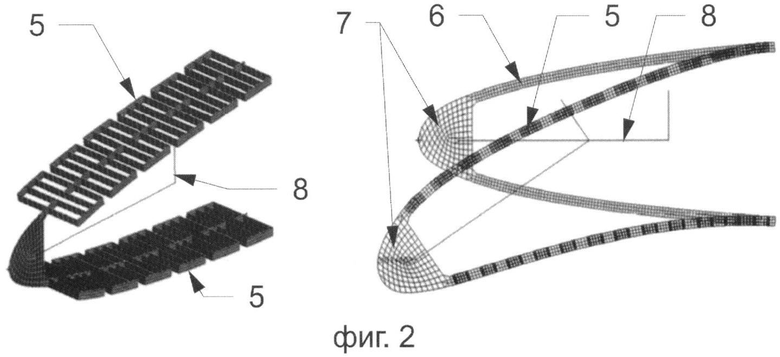
- на фиг. 2 - схема другого известного устройства для осуществления известных способов [2-4], включающая цепочку ячеек SDS-конструкций 5 с эластомерным заполнителем 6 и жестким лобовиком 7, отклоняемым с помощью рычага 8;
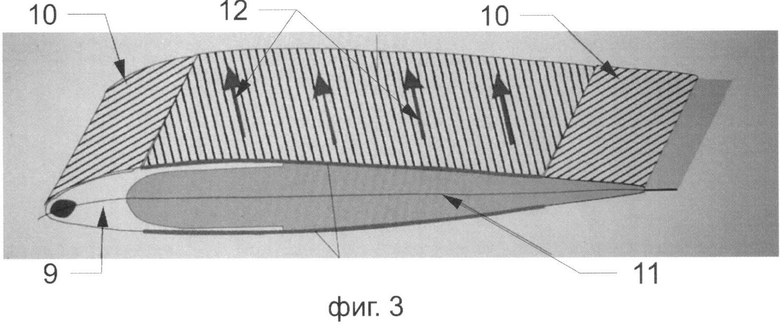
- на фиг. 3 - схема известного устройства для осуществления известных способов [5, 6], принятого в качестве прототипа, включающего лонжерон лопасти вертолета 9, обшивку 10, опирающуюся на профиль, образованный вспененным материалом типа пенопласта 11, в том числе специальный участок обшивки, служащий приводом 12, осуществляющим целесообразное закручивание лопасти винта по ее размаху за счет сдвиговых деформаций обшивки-привода 12.
Предлагаемое изобретение иллюстрируется на фиг. 4-6.
На фиг. 4 приведена схема крыла с деформируемой концевой частью несущей поверхности 13, лонжеронами 14 и силовыми нервюрами 15.
На фиг. 5 показано сечение А-А крыла (фиг. 4), на котором представлен кессон 16 крыла, лонжероны 14, силовая нервюра 15, отверстия внутри полок лонжеронов 17, в которых расположены скользящие вдоль них продольные силовые упругие элементы 18; в деформируемый кессон включена также обшивка 19.
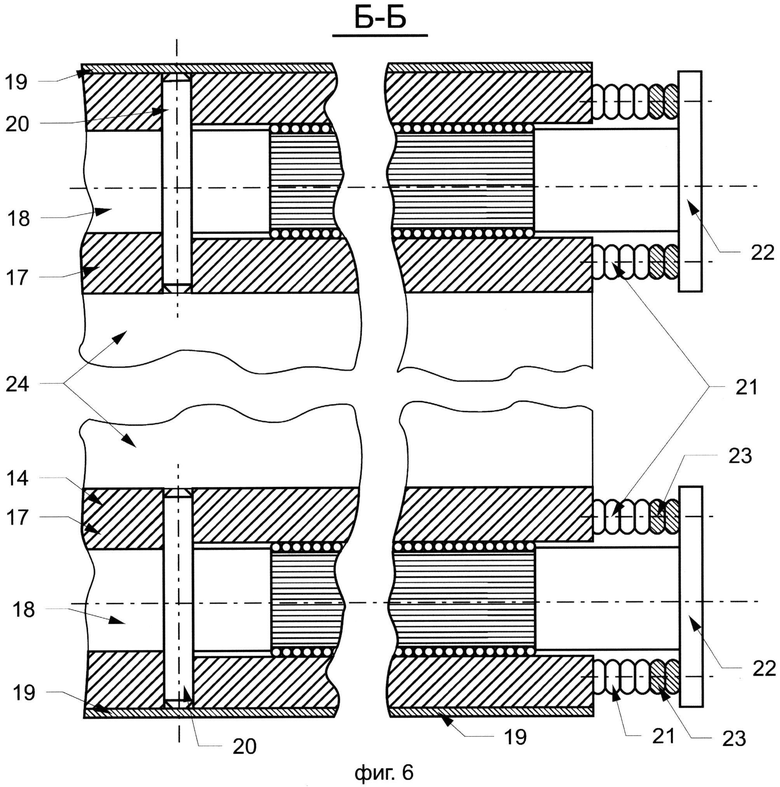
На фиг. 6 представлено сечение Б-Б, показанное на фиг. 5, с изображением обшивки 19, лонжерона 14, с его верхней и нижней полками 17, продольных силовых упругих элементов 18 (в виде прутка или витого троса или троса, набранного из высокопрочных нитей с цилиндрической оплеткой, направленных вдоль оси сквозного продольного отверстия). Продольные силовые упругие элементы 18 соединены с полками лонжеронов неподвижно в начале деформируемой концевой части несущей поверхности (например, с помощью штифтов 20) и подвижно в ее конце, в месте расположения силового привода 21, перемещающего торец 22 продольных силовых упругих элементов 18 относительно торца полок 17, по сигналам датчика сил 23. Полки лонжеронов 14 соединены стенками 24.
Устройство включает лонжероны 14, нервюры 15, обшивку 19 кессона 16. Внутри верхней и нижней полок переднего и заднего лонжеронов несущей поверхности выполнено сквозное продольное отверстие 17. Внутри него, заполняя все пространство отверстия, размещен в качестве скользящего вдоль отверстия продольного силового упругого элемента 18 пруток или витой трос или трос, набранный из высокопрочных нитей с цилиндрической оплеткой, направленных вдоль оси сквозного продольного отверстия. Этот продольный силовой упругий элемент 18 жестко заделан (например, с помощью штифтов 20, фиг. 6) в полке лонжерона 14 в начале участка деформируемой концевой части 13 несущей поверхности, на удалении от ее конца на 20-40% размаха. Противоположный конец продольного силового упругого элемента 18, выходящий из отверстия в торце полки лонжерона, соединен с силовым приводом 21. В качестве силового привода 21 служит, например, пакетный пьезоэлектрический привод, привод с использованием сплавов с памятью формы, электро- или гидропривод, закрепленный на торце полки лонжерона, обеспечивающий целесообразное в соответствии с необходимой формой участка деформируемой концевой части несущей поверхности и напряженно-деформированным состоянием полок натяжение в основном, но при необходимости также сжатие продольного силового упругого элемента требуемыми усилиями приводов. Силовые приводы 21 обеспечивают перемещение торцов 22 продольных силовых упругих элементов 18 относительно торцов полок 17, по сигналам датчика сил 23.
Верхняя и нижняя полки каждого из лонжеронов связаны тонкостенной ферменной конструкцией, например в виде стенки 24 с вырезами. Передний и задний лонжероны связаны силовыми нервюрами 15, а также верхней и нижней панелями обшивки 19 (трехслойными, в частности, сотовыми панелями с тонкой силовой обшивкой из ортотропного композиционного материала с направлением волокон по нормали к лонжеронам или вдоль лонжеронов), воспроизводящими профиль несущей поверхности, воспринимающими аэродинамическую нагрузку.
Реализация предложенного способа с помощью разработанного устройства осуществляют следующим образом. Закручивают и изгибают в основном концевую часть несущей поверхности, изменяя распределение местных углов атаки сечений и прогибов кессона, для чего изгибают передний и задний лонжероны - каждый в своей плоскости. Для этого сжимают (растягивают) пояса лонжеронов на участке деформируемой концевой части несущей поверхности. Выполняют это с помощью располагаемых вблизи полок лонжеронов, независимо от них деформируемых, ориентированных соосно с направлением полок и не связанных с полками на деформируемой концевой части несущей поверхности продольных силовых упругих элементов. Они соединены с полками лонжеронов неподвижно в начале деформируемой концевой части несущей поверхности и подвижно в ее конце, в месте расположения силового привода. При этом с помощью силового привода регулируют расстояние между торцом полки соответствующего лонжерона и свободным подвижным в направлении, соосным с направлением полок, торцом соответствующего продольного силового упругого элемента.
Варьируют натяжение каждого из предварительно натянутых продольных силовых упругих элементов: для уменьшения (увеличения) изгибных деформаций деформируемой концевой части в большей (на 5-20%) степени сжимают нижние (верхние) полки переднего (заднего) лонжеронов, нежели верхние (нижние) полки этих лонжеронов, а для уменьшения (увеличения) местного угла атаки деформируемой концевой части в большей (на 5-20%) степени уменьшают (увеличивают) сжатие верхнего (нижнего) пояса переднего лонжерона по сравнению со сжатием нижнего (верхнего) пояса переднего лонжерона и уменьшают (увеличивают) сжатие нижнего (верхнего) пояса заднего лонжерона по сравнению со сжатием верхнего (нижнего) пояса заднего лонжерона.
В случае обрыва или отказа системы управления какого-либо из продольных силовых упругих элементов по сигналу соответствующего датчика сил отключают соответствующий привод и продолжают управлять упругими изгибными и крутильными деформациями деформируемой концевой части несущей поверхности за счет других продольных силовых упругих элементов, предпочтительно нижних, сообразно цели изменения деформаций полок переднего и заднего лонжеронов.
Таким образом, благодаря предложенным способу и устройству обеспечивается достижение ожидаемого технического результата, а именно целесообразное деформирование кессона несущей поверхности, снижение изгибающих моментов в корне крыла и по его размаху, снижение динамических нагрузок на всех этапах полета от взлета до посадки, подавление флаттера, снижение шума из-за отсутствия щелей, повышение эффективности управления по крену и т.д.
| название | год | авторы | номер документа |
|---|---|---|---|
| КРЫЛО С УПРАВЛЯЕМОЙ ЗАКРУТКОЙ | 2018 |
|
RU2696138C1 |
| Крыло самолёта, кессон крыла самолета, центроплан, лонжерон (варианты) | 2019 |
|
RU2709976C1 |
| КРЫЛО САМОЛЕТА | 2014 |
|
RU2557638C1 |
| Способ изготовления адаптивного крыла с гибкой бесщелевой механизацией | 2022 |
|
RU2784223C1 |
| КРЫЛО ШИРОКОФЮЗЕЛЯЖНОГО ДАЛЬНЕМАГИСТРАЛЬНОГО САМОЛЕТА | 2024 |
|
RU2838859C1 |
| Адаптивное крыло с гибкой бесщелевой механизацией | 2022 |
|
RU2784222C1 |
| КРЫЛО ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2191137C2 |
| КЕССОН КРЫЛА ИЗ КОМПОЗИЦИОННОГО МАТЕРИАЛА | 2013 |
|
RU2532254C2 |
| КЕССОН КРЫЛА ИЗ КОМПОЗИЦИОННОГО МАТЕРИАЛА | 2013 |
|
RU2532255C1 |
| Активная законцовка крыла | 2022 |
|
RU2787983C1 |


Изобретение относится к области авиации, в частности к конструкциям и способам изменения аэродинамических характеристик несущих поверхностей летательных аппаратов. Способ управления упругими изгибными и крутильными деформациями несущей поверхности включает операцию деформирования кессона несущей поверхности с помощью системы управления, снабженной чувствительными элементами, приводами и вычислителем. При этом закручивают и изгибают концевую часть несущей поверхности, изменяя распределение местных углов атаки сечений и распределение прогибов кессона по размаху, для чего изгибают передний и задний лонжероны каждый в своей плоскости. С помощью силового привода изменяют расстояние между торцом полки соответствующего лонжерона и торцом силового упругого элемента. Внутри верхней и нижней полок переднего и заднего лонжерона выполняют сквозное отверстие, внутри которого размещают пруток или трос из высокопрочных нитей. Упругий элемент жестко заделан в полке лонжерона в начале деформируемого участка, а противоположный конец соединен с силовым приводом. Достигается повышение эффективности управления аэродинамическими нагрузками. 2 н. и 3 з.п. ф-лы, 6 ил.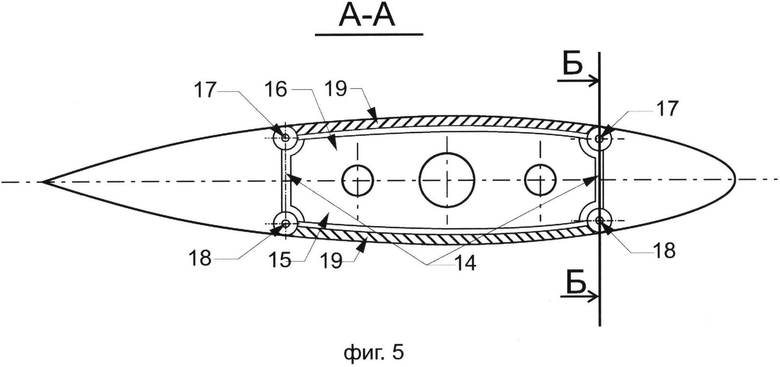
1. Способ управления упругими изгибными и крутильными деформациями несущей поверхности, включающий операцию деформирования кессона несущей поверхности с помощью системы управления, снабженной чувствительными элементами, быстродействующими приводами и вычислителем, отличающийся тем, что закручивают и изгибают в основном концевую часть несущей поверхности, изменяя в соответствии с требованиями по прочности, аэродинамике и аэроупругости распределение местных углов атаки сечений и распределение прогибов кессона по размаху несущей поверхности, для чего изгибают передний и задний лонжероны - каждый в своей плоскости, для этого сжимают предпочтительно, но при необходимости и растягивают, пояса лонжеронов на участке деформируемой концевой части несущей поверхности с помощью располагаемых вблизи полок лонжеронов, независимо от них деформируемых, ориентированных соосно с направлением полок и не связанных с полками на деформируемой концевой части несущей поверхности предварительно натянутых продольных силовых упругих элементов, соединенных с полками лонжеронов неподвижно в начале деформируемой концевой части несущей поверхности и подвижно в ее конце, в месте расположения силового привода, при этом с помощью силового привода изменяют расстояние между торцом полки соответствующего лонжерона и свободным подвижным в направлении, соосном с направлением полок, торцом соответствующего продольного силового упругого элемента.
2. Способ управления упругими изгибными и крутильными деформациями несущей поверхности по п. 1, отличающийся тем, что в зависимости от потребных знака и величины приращения прогибов кессона или местных углов атаки сечений деформируемой концевой части несущей поверхности варьируют предпочтительно натяжение, но при необходимости и сжатие, каждого из продольных силовых упругих элементов, причем так, что для уменьшения изгибных деформаций деформируемой концевой части в большей на 5-20% степени сжимают нижние полки переднего и заднего лонжеронов, нежели верхние полки этих лонжеронов, а для увеличения изгибных деформаций деформируемой концевой части в большей на 5-20% степени сжимают верхние полки переднего и заднего лонжеронов, нежели нижние полки этих лонжеронов; для уменьшения местного угла атаки деформируемой концевой части в большей на 5-20% степени уменьшают сжатие верхнего пояса переднего лонжерона по сравнению со сжатием нижнего пояса переднего лонжерона и уменьшают сжатие нижнего пояса заднего лонжерона по сравнению со сжатием верхнего пояса заднего лонжерона, а для увеличения местного угла атаки деформируемой концевой части в большей на 5-20% степени увеличивают сжатие верхнего пояса переднего лонжерона по сравнению со сжатием нижнего пояса переднего лонжерона и уменьшают сжатие верхнего пояса заднего лонжерона по сравнению со сжатием нижнего пояса заднего лонжерона; при этом в случае обрыва или отказа системы управления какого-либо из продольных силовых упругих элементов по сигналу соответствующего датчика сил отключают соответствующий привод и продолжают управлять упругими изгибными и крутильными деформациями деформируемой концевой части несущей поверхности за счет других продольных силовых упругих элементов, предпочтительно нижних, сообразно цели изменения деформаций полок переднего и заднего лонжеронов.
3. Устройство, реализующее способ управления упругими изгибными и крутильными деформациями несущей поверхности, включающее лонжероны, нервюры, обшивку кессона, отличающееся тем, что внутри верхней и нижней полок переднего и заднего лонжеронов несущей поверхности выполнено сквозное продольное отверстие, внутри которого, заполняя все пространство отверстия, размещен в качестве скользящего вдоль отверстия продольного силового упругого элемента пруток, витой трос или трос с цилиндрической оплеткой, набранный из высокопрочных нитей, направленных вдоль оси сквозного продольного отверстия, этот продольный силовой упругий элемент жестко заделан в полке лонжерона в начале участка деформируемой концевой части несущей поверхности, удаленного от ее конца на 20-40% размаха, а противоположный конец продольного силового упругого элемента, выходящий из отверстия в торце полки лонжерона, соединен с силовым приводом, обеспечивающим целесообразное в соответствии с необходимой формой участка деформируемой концевой части несущей поверхности и напряженно-деформированным состоянием полок натяжение в основном либо при необходимости также сжатие продольного силового упругого элемента требуемыми усилиями за счет соответствующего перемещения торцов продольных силовых упругих элементов относительно торцов полок, по сигналам датчика сил.
4. Устройство, реализующее способ управления упругими изгибными и крутильными деформациями несущей поверхности по п. 3, отличающееся тем, что передний и задний лонжероны несущей поверхности крыла или лопасти вертолета выполнены с минимальной собственной крутильной жесткостью, например, благодаря тому, что верхняя и нижняя полки каждого из лонжеронов связаны тонкостенной ферменной конструкцией, передний и задний лонжероны связаны силовыми нервюрами, а также верхней и нижней панелями, воспроизводящими профиль несущей поверхности, воспринимающими аэродинамическую нагрузку и также имеющими минимальный вклад в крутильную жесткость, например, за счет использования трехслойных, в частности, сотовых панелей с тонкой силовой обшивкой из ортотропного композиционного материала с направлением волокон по нормали к лонжеронам или вдоль лонжеронов.
5. Устройство, реализующее способ управления упругими изгибными и крутильными деформациями несущей поверхности по п. 3, отличающееся тем, что в качестве силового привода служит, например, пакетный пьезоэлектрический привод, электро- или гидропривод, закрепленный на торце полки лонжерона и связанный с торцом продольного силового упругого элемента.
| Устройство для контроля внеполосных спектров излучения радиопередатчиков | 1989 |
|
SU1674389A1 |
| УПРУГОДЕФОРМИРУЕМАЯ ПАНЕЛЬ АДАПТИВНОЙ НЕСУЩЕЙ ПОВЕРХНОСТИ | 2005 |
|
RU2299833C1 |
| US 2006145030 A1, 06.07.2006 | |||
| КРЫЛО ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2191137C2 |
| WO 2014041221 A1, 20.03.2014. | |||

