Изобретение относится к области радиолокационной измерительной техники и может быть использовано для создания систем контроля и измерения уровня сыпучих продуктов в резервуарах, эксплуатация которых осуществляется на предприятиях строительной, горнодобывающей и нефтехимической отраслей, в том числе и во взрывоопасной среде.
Известен способ измерения уровня сыпучих продуктов, предполагающий использование возможности изменения положения диаграммы направленности антенны внутри исследуемого резервуара в соответствии с заданным алгоритмом (патент США №6634234, G01N 29/04, 21.10.2003).
Сущность способа с использованием регулируемой измерительной головной части заключается в облучении исследуемого продукта радиолокационным сигналом соответствующей структуры и фиксированной мощности, последующем приеме отраженного исследуемым продуктом сигнала с помощью приемо-передающего модуля, размещенного внутри исследуемого резервуара в одном из трех возможных угловых положений, его обработке в соответствии с заданным алгоритмом и выработке сигнала управления для последующей корректировки углового положения диаграммы направленности.
Реализующий способ изменения углового положения диаграммы направленности уровнемер включает приемо-передающий модуль, содержащий антенну и размещенный на исполнительном механизме (актуаторе), который в свою очередь размещается внутри резервуара. Актуатор и приемо-передающий модуль соединены с контрольным модулем, который в свою очередь соединен с дисплейным модулем. При этом все оборудование, за исключением актуатора и приемо-передающего модуля находится за пределами внутреннего объема исследуемого резервуара. Управление угловым положением диаграммы направленности приемо-передающего модуля осуществляется путем подачи соответствующих сигналов управления с контрольного модуля на актуатор. Процесс выработки сигналов управления предусматривает применение специальных алгоритмов обработки отраженных сигналов, поступающих с приемо-передающего модуля с учетом текущей дальности до поверхности исследуемого продукта.
Основным недостатком указанного способа и реализующего его устройства для изменения положения диаграммы направленности в пространстве является наличие механического узла в виде актуатора. Такой механический способ изменения положения диаграммы направленности в пространстве путем изменения ориентации всего приемо-передающего модуля имеет низкую надежность вследствие того, что механические узлы подвергаются загрязнению из-за воздействия пыли, неизбежно присутствующей внутри резервуаров с сыпучими продуктами. Фиксированное, равное трем, возможное угловое положение диаграммы направленности существенно ограничивает эксплуатационные характеристики уровнемера. Это связано с тем, что измерение уровня сыпучих продуктов в отличие от жидких имеет свои особенности, которые заключаются в том, что поверхность таких продуктов не является гладкой и в отдельных случаях может представлять собой нерегулярную структуру. При этом отсутствует зеркальное отражение зондирующего сигнала, что приводит иногда к его частичной или полной потере. В этом случае изменение углового положения диаграммы направленности может способствовать появлению полезного сигнала. При достаточно узкой диаграмме направленности антенны (порядка 2-4 градуса) может потребоваться гораздо большее число возможных угловых положений диаграммы направленности антенны. В дополнение к вышеизложенному следует отметить, что размещение актуатора вместе с приемо-передающим модулем внутри исследуемого резервуара исключает возможность работы уровнемера во взрывоопасной среде. В качестве примера продуктов, которые могут образовывать взрывоопасную смесь, можно отметить уголь, технический углерод, зерно, комбикорм.
Перед авторами стояла задача создать способ измерения уровня сыпучих продуктов и устройство, его реализующее, надежно работающих в различного рода резервуарах, емкостях для широкого спектра продуктов, которые в том числе могут образовывать взрывоопасную смесь.
Поставленная задача достигается тем, что в известном способе измерения уровня сыпучих продуктов излучают и принимают отраженные радиолокационные сигналы, частота которых изменяется по линейному закону, измеряют разностную частоту между излучаемым и отраженным от поверхности исследуемого продукта радиолокационными сигналами, выделяют и обрабатывают радиолокационный сигнал с применением специальных алгоритмов и рассчитывают дальность, дополнительно осуществляют электронное сканирование диаграммы направленности микрополосковой антенны, излучают и принимают отраженные радиолокационные сигналы для различных угловых положений диаграммы направленности, производят измерение уровня отраженного сигнала, осуществляют спектральную обработку отраженных радиолокационных сигналов, на основе которой и введенных геометрических параметров исследуемого резервуара вычисляют оптимальное угловое положение диаграммы направленности, формируют сигнал управления диаграммой направленности микрополосковой антенны.
В радиолокационный уровнемер для осуществления способа измерения уровня сыпучих продуктов, содержащий датчик уровня, соединенный с микрополосковой антенной посредством волноводного перехода, фазовращатели, установленные на микрополосковой антенне, дополнительно введены электрически связанные между собой детекторная секция и блок управления, образующие совместно канал управления диаграммой направленности микрополосковой антенны.
Детекторная секция расположена на излучающей поверхности микрополосковой антенны.
Блок управления соединен с искробезопасным источником питания.
Блок управления состоит из микроконтроллера, дешифратора команд управления, формирователя сигналов управления фазовращателями, при этом выход дешифратора соединен со входом микроконтроллера, выход которого соединен со входом формирователя сигналов управления фазовращателями, выход которого соединен с фазовращателями, а вход дешифратора команд управления соединен с детекторной секцией.
Введение канала управления диаграммой направленности микрополосковой антенны позволяет оперативно, не используя механический способ, изменять положение диаграммы направленности микрополосковой антенны внутри исследуемого резервуара в соответствии с заданным алгоритмом, что приведет к достижению технического результата в виде улучшения эксплуатационных характеристик уровнемера за счет сохранения возможности измерять дальность до поверхности исследуемого сыпучего продукта независимо от его формы, в том числе и во взрывоопасной среде.
Заявляемые способ измерения уровня сыпучих продуктов и радиолокационный уровнемер для его осуществления обладают совокупностью существенных признаков, не известных из уровня техники для изделий подобного назначения, что позволяет сделать вывод о соответствии критерию «новизна» для изобретения.
Заявляемые способ измерения сыпучих продуктов и радиолокационный уровнемер для его осуществления, по мнению заявителя и авторов, соответствуют критерию «изобретательский уровень», т.к. для специалистов они явным образом не следуют из уровня техники, т.е. не известны из доступных источников научной, технической и патентной информации на дату подачи заявки.
Сущность предлагаемого способа измерения уровня сыпучих продуктов в резервуарах и радиолокационного уровнемера для его осуществления поясняются с помощью чертежей, где:
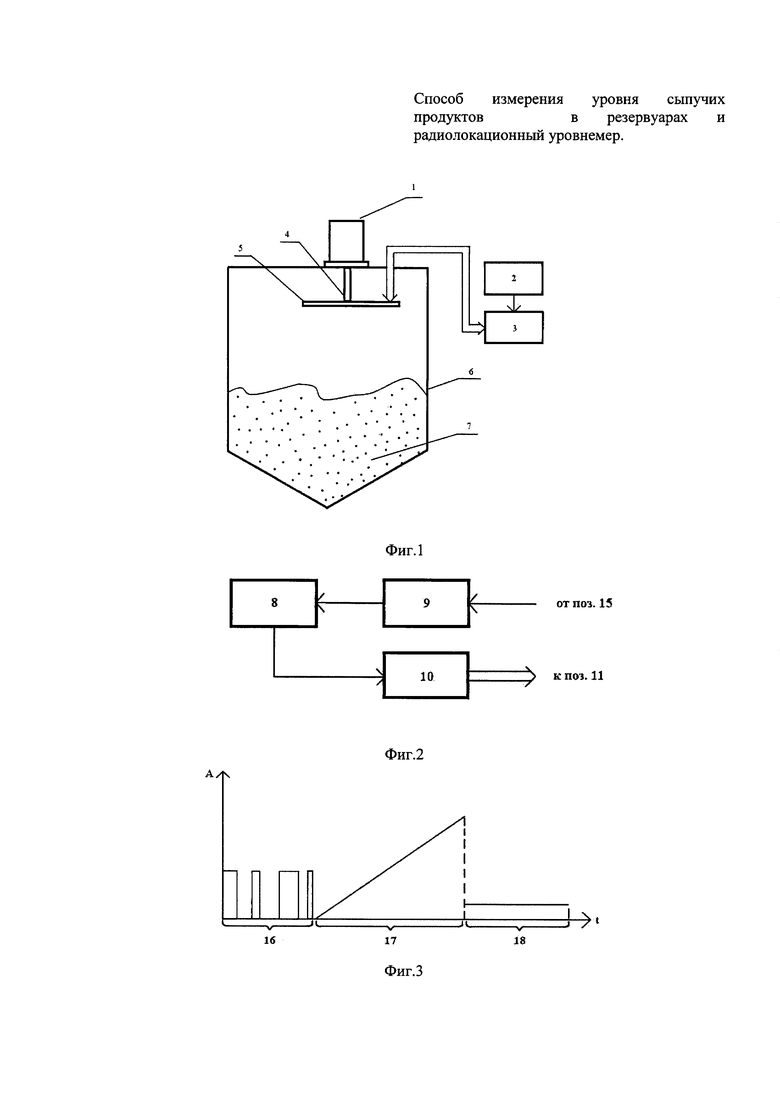
- на фиг. 1 представлена блок-схема радиолокационного уровнемера;
- на фиг. 2 - структурная схема блока управления;
- на фиг. 3 - структура сигнала, формируемого датчиком уровня;
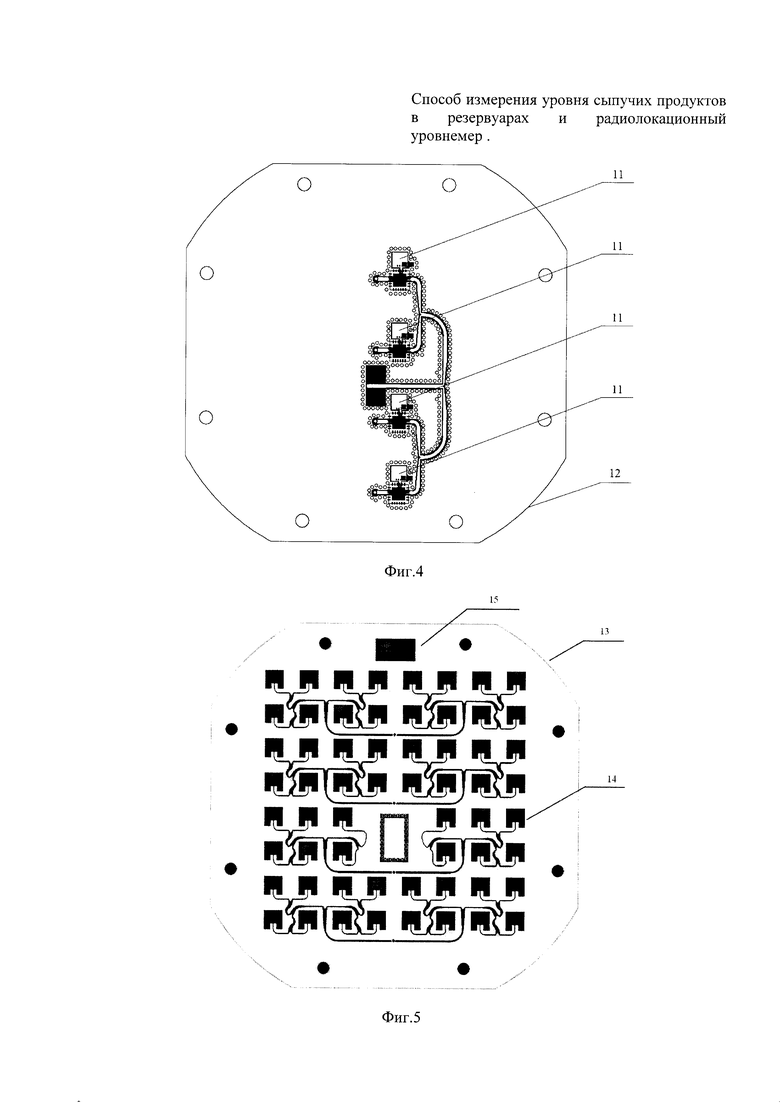
- на фиг. 4 - вид внутренней поверхности микрополосковой антенны;
- на фиг. 5 - вид внешней излучающей поверхности микрополосковой антенны.
Радиолокационный уровнемер содержит датчик 1 уровня, искробезопасный источник 2 питания, блок 3 управления, волноводный переход 4 и микрополосковую антенну 5. В резервуаре 6 находится сыпучий продукт 7.
Блок 3 управления содержит микроконтроллер 8, дешифратор 9 команд управления и формирователь 10 сигналов управления фазовращателями 11.
Микрополосковая антенна 5 имеет внутреннюю сторону 12, на которой размещены четыре фазовращателя 11, и внешнюю излучающую сторону 13, на которой размещены излучающие элементы 14 и детекторная секция 15. В качестве управляемых фазовращателей 11 применены микросхемы НМС 933LP4E производства фирмы Hittite microwave corporation. Микросхема содержит варакторы и цепи согласования.
Радиолокационный уровнемер работает следующим образом. Датчик 1 уровня формирует и излучает радиолокационный сигнал, который через волноводный переход 4 поступает на микрополосковую антенну 5. Излученный микрополосковой антенной 5 сигнал в направлении сыпучего продукта 7, расстояние до которого необходимо измерить, отражается от поверхности продукта и возвращается обратным путем в датчик 1 уровня. Частота излученного радиолокационного сигнала изменяется во времени по линейному закону. В результате взаимодействия излучаемого и отраженного сигналов в датчике 1 уровня образуется целый ряд спектральных составляющих, частота которых несет информацию о дальности до поверхности продукта. После применения специальных алгоритмов обработки информации, на выходе датчика 1 получают текущее значение дальности в цифровом виде.
Алгоритм управления диаграммой направленности микрополосковой антенны 5 предполагает поиск оптимального угла наклона диаграммы направленности по критерию максимального уровня отраженного от поверхности продукта 7 сигнала. Определение границ сканирования производится с учетом ширины диаграммы направленности микрополосковой антенны 5, геометрических параметров резервуара 6, текущих значений дальности и угла. Изменение положения диаграммы направленности микрополосковой антенны 5 осуществляют посредством управления фазами радиолокационного сигнала, возбуждаемого разными группами излучающих элементов 14. Управление фазовращателями 11 осуществляют с помощью блока 3 управления. Формирование сигнала управления производится на основе команд, поступающих с выхода детекторной секции 15 на вход дешифратора 9 команд управления. На вход дешифратора 9 команд управления поступает последовательность импульсов 16, представляющая собой широтно-импульсный модулированный сигнал. Этот сигнал является набором команд управления, который формируют в датчике 1 уровня и излучают микрополосковой антенной 5 аналогично радиолокационному сигналу на одной из частот, находящихся внутри рабочего диапазона датчика 1 уровня. Приемником команд управления является детекторная секция 15. Излучение управляющих импульсов 16 и радиолокационного сигнала разнесено во времени. Временная структура сигнала приведена на фиг. 3. Здесь наряду с импульсами 16 управления производят формирование радиолокационного сигнала на участке 17 и производят обработку принятых сигналов на участке 18.
Микроконтроллер 8 на основе данных, поступающих с выхода дешифратора 9 команд управления, с помощью специального алгоритма управляет работой формирователя 10 сигнала управления фазовращателями 11, выход которого соединен с фазовращателями 11.
Питание блока 3 управления осуществляется от искробезопасного источника 2. Схемотехника блока 3 управления и микрополосковой антенны 5 позволяет выполнить и сертифицировать эти узлы в искробезопасном исполнении, что приводит к возможности сертификации для работы во взрывоопасной среде радиолокационного уровнемера с применением ранее сертифицированного датчика 1 уровня.
На предприятии-заявителе разработана конструкторская документация радиолокационного уровнемера заявляемой конструкции, изготовлен его опытный образец, испытания которого подтвердили работоспособность и преимущества по сравнению с известными, что позволяет сделать вывод о соответствии критерию «промышленная применимость» для изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОЛОКАЦИОННЫЙ УРОВНЕМЕР | 2014 |
|
RU2561309C1 |
| РАДИОЛОКАЦИОННЫЙ УРОВНЕМЕР | 2011 |
|
RU2471159C1 |
| Радиолокационный уровнемер для измерения объема сыпучих продуктов в резервуарах | 2017 |
|
RU2653578C1 |
| РАДИОЛОКАЦИОННЫЙ УРОВНЕМЕР | 2011 |
|
RU2460048C1 |
| РАДИОЛОКАЦИОННЫЙ ИМПУЛЬСНЫЙ РЕЦИРКУЛЯЦИОННЫЙ УРОВНЕМЕР | 2000 |
|
RU2176382C1 |
| РАДИОЛОКАЦИОННЫЙ ИМПУЛЬСНЫЙ РЕЦИРКУЛЯЦИОННЫЙ УРОВНЕМЕР | 2003 |
|
RU2247950C1 |
| УРОВНЕМЕР | 1997 |
|
RU2126145C1 |
| Радиолокационный прибор для измерения уровня и объема сыпучих материалов | 2024 |
|
RU2819575C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ НАДВОДНЫХ ЦЕЛЕЙ | 2005 |
|
RU2287840C1 |
| Способ построения радиолокационного запросчика | 2019 |
|
RU2713621C1 |
Изобретение относится к области радиолокационной измерительной техники и может быть использовано для создания систем контроля и измерения уровня сыпучих продуктов в резервуарах, эксплуатация которых осуществляется на предприятиях строительной, горнодобывающей и нефтехимической отраслей. Техническим результатом является улучшение эксплуатационных характеристик за счет сохранения надежной работоспособности при проведении измерений в различного рода резервуарах для широкого перечня сыпучих продуктов, независимо от геометрической формы, образующейся во время рабочего процесса, в том числе и во взрывоопасных средах. Суть предложенного способа заключается в том, что помимо излучения в заданном направлении и приема отраженных от поверхности исследуемого продукта радиолокационных сигналов, частота которых изменяется по линейному закону, измерения разностной частоты между излучаемым и отраженным сигналами, выделения полезного сигнала и расчета дальности, дополнительно осуществляется электронное сканирование диаграммы направленности микрополосковой антенны, излучают и принимают отраженные радиолокационные сигналы для различных угловых положений диаграммы направленности, производят измерение уровня отраженного сигнала, осуществляют спектральную обработку отраженных сигналов, на основе которой и введенных геометрических параметров исследуемого резервуара вычисляют оптимальное угловое положение диаграммы направленности, формируют сигнал управления диаграммы направленности микрополосковой антенны. Также в заявленном изобретении раскрыт радиолокационный уровнемер для осуществления вышеуказанного способа. 2 н. и 3 з.п. ф-лы, 5 ил.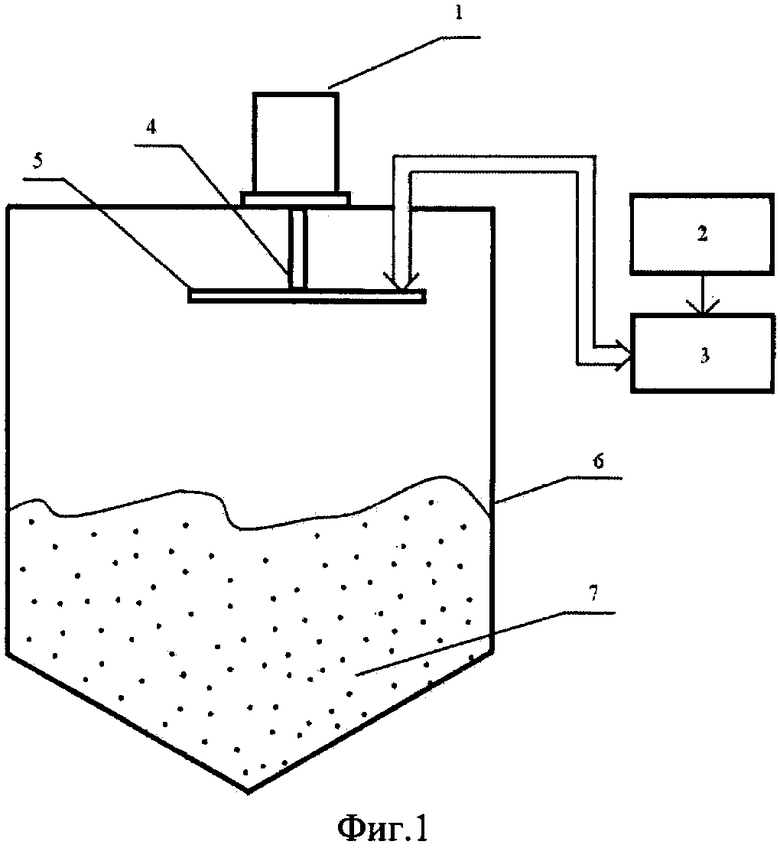
1. Способ измерения уровня сыпучих продуктов, в котором излучают в заданном направлении и принимают радиолокационные сигналы, частота которых изменяется по линейному закону, измеряют разностную частоту между излучаемым и отраженным от поверхности исследуемого продукта сигналами, выделяют полезный сигнал и рассчитывают дальность, отличающийся тем, что осуществляют электронное сканирование диаграммы направленности микрополосковой антенны, излучают и принимают отраженные радиолокационные сигналы для различных угловых положений диаграммы направленности, производят измерение уровня отраженного сигнала, осуществляют спектральную обработку отраженных сигналов, на основе которой и введенных геометрических параметров исследуемого резервуара вычисляют оптимальное угловое положение диаграммы направленности, формируют сигнал управления диаграммой направленности микрополосковой антенны.
2. Радиолокационный уровнемер для осуществления способа по п. 1, содержащий датчик уровня, соединенный с микрополосковой антенной посредством волноводного перехода, фазовращатели, установленные на микрополосковой антенне, отличающийся тем, что в состав радиолокационного уровнемера дополнительно введены электрически связанные между собой детекторная секция и блок управления, образующие совместно канал управления диаграммой направленности микрополосковой антенны.
3. Радиолокационный уровнемер по п. 2, отличающийся тем, что детекторная секция расположена на излучающей поверхности микрополосковой антенны.
4. Радиолокационный уровнемер по п. 2, отличающийся тем, что блок управления соединен с искробезопасным источником питания.
5. Радиолокационный уровнемер по п. 4, отличающийся тем, что блок управления выполнен в виде микроконтроллера, дешифратора команд управления, формирователя сигналов управления фазовращателями, при этом выход дешифратора соединен со входом микроконтроллера, выход которого соединен со входом формирователя сигналов управления фазовращателями, выход которого соединен с фазовращателями, а вход дешифратора команд управления соединен с детекторной секцией.
| Шнековый пресс для формования торфа-сырца | 1957 |
|
SU113577A1 |
| US 7201050 B2 10.04.2007 | |||
| РАДИОЛОКАЦИОННЫЙ УРОВНЕМЕР | 2011 |
|
RU2460048C1 |
| РАДИОЛОКАЦИОННЫЙ УРОВНЕМЕР | 2011 |
|
RU2471159C1 |
| US 7895889 B2 01.03.2011.. | |||

