Настоящее изобретение относится к определению направления прихода сигнала от источника звука, такого как, например, громкоговоритель, и к устройству и к способу оценки пространственной позиции.
Извлечение информации о геометрической конфигурации звуковой сцены, такой как, например, оценка локализации и оценка направления прихода входящих сигналов, становится все более и более важной, поскольку эта информация является ценной во множестве областей применения, таких как, например, регулирование акустического эхо-сигнала, анализ сцен, формирование диаграммы направленности и обработка сигналов для распределенных акустических датчиков.
Например, существуют способы, в которых анализируют записанный аудиосигнал, в который не внедрен какой-либо сигнал водяного знака (WM), если одиночный громкоговоритель воспроизводит аудиоэлемент, и имеется массив микрофонов для записи. Если отсутствует какой-либо другой источник звука, например, говорящий человек или иной источник помех, то можно оценить направление прихода сигнала, например, посредством направленного аудиокодирования (Directional Audio Coding). Приведена ссылка на документ Jukka Ahonen, Giovanni Del Galdo, Markus Kallinger, Fabian Küch, Ville Pulkki, и Richard Schultz-Amling, “Planar microphone array processing for the analysis and reproduction of spatial audio using directional audio coding”, in Audio Engineering Society Convention 124, 5, 2008. Как только другой источник излучает звук в тот же самый момент времени, направление прихода которого является нежелательным, это препятствует определению правильного угла падения. Получают две различные оценки направления прихода, если присутствующие сигналы исходят из различных пространственных позиций. В этом случае необходима дополнительная информация о предпочтительном звуковом сигнале.
В сценарии, когда система воспроизведения имеет более одного громкоговорителя, если воспроизведенные сигналы являются различными, направление прихода сигнала можно оценить посредством использования ранее объясненных подходов. Однако, если воспроизводят сходные аудиоэлементы, то есть на стереофонической установке, то возникает известное явление, а именно, источник ложного сигнала. Это означает, что звук воспринимают так, как будто бы он был воспроизведен виртуальным источником, расположенным между громкоговорителями. В этом случае оценка углов падения оказывается неуспешной.
Для особого применения, включающего в себя калибровку системы воспроизведения, существуют другие известные способы, например, воспроизведение сигналов MLS или сигналов с качающейся частотой, которые используются для определения угла падения воспроизводимого звука. Приведена ссылка на документ Giovanni Del Galdo, Matthias Lang, Jose Angel Pineda Pardo, Andreas Silzle, и Oliver Thiergart, “Acoustic measurement system for 3-D loudspeaker set-ups”, в Audio Engineering Society Conference: Spatial Audio: Sense the Sound of Space, 10 2010. Однако эти сигналы являются слышимыми и часто раздражающими. Кроме того, перед тем, как может использоваться система воспроизведения, необходимо выполнять калибровку. Следовательно, предпочтительным является использование аудиосигналов с водяными знаками, имея в виду, что калибровка может быть выполнена во время работы системы.
Часто используемым способом определения направления или позиции датчика является использование радиочастотных сигналов и различных датчиков. Способы, основанные на этой технологии, обеспечивают хорошие оценки, но они неприменимы в тех областях, где радиочастотные сигналы запрещены или их сложно использовать. Кроме того, в таких сценариях должны быть установлены радиочастотные датчики.
Другой способ, в котором также используют сигналы с водяными знаками, представлен в документе Ryuki Tachibana, Shuichi Shimizu, Seiji Kobayashi, и Taiga Nakamura, “An audio watermarking method using a two-dimensional pseudo-random array”, Обработка сигналов, том 82, страницы 1455-1469, Октябрь 2002. Здесь позицию записи оценивают посредством использования лишь одного микрофона и путем измерения временной задержки прихода нескольких излученных аудиосигналов с водяными знаками. В этом сценарии какая-либо информация направления недоступна, и система ограничена использованием минимального количества громкоговорителей.
Как было описано выше, на предшествующем уровне техники выявляются несколько проблем. Согласно некоторым способам из предшествующего уровня техники, может быть определено местоположение фантомного источника, который не соответствует желательному громкоговорителю. В других способах из предшествующего уровня техники выявляется проблема, состоящая в том, что они определяют местоположение иных источников в комнате или, что для них необходимы специальные измерительные сигналы, которые не могут быть воспроизведены в реальной ситуации, где фактически используются громкоговорители. Задачей настоящего изобретения является создание усовершенствованных концепций для определения направления прихода сигнала передачи. Согласно другому аспекту настоящего изобретения, предложены улучшенные концепции для оценки пространственной позиции. Задача настоящего изобретения решена посредством устройства для предоставления информации направления по п.1, способа предоставления информации направления по п.12, компьютерной программы для предоставления информации направления по п.13, устройства для оценки пространственной позиции по п.14, способа оценки пространственной позиции по п.15 и компьютерной программы для оценки пространственной позиции по п.16.
Предложено устройство для предоставления информации направления на основании воспроизведенного аудиосигнала с внедренным водяным знаком. Это устройство содержит процессор сигналов, приспособленный для обработки по меньшей мере двух принятых аудиосигналов с водяными знаками, записанных по меньшей мере двумя аудиоприемниками в различных пространственных позициях. Аудиоприемники приспособлены для записи звуковых волн воспроизведенного аудиосигнала для получения принятых аудиосигналов с водяными знаками. Каждый принятый аудиосигнал с водяными знаками содержит внедренный водяной знак. Процессор сигналов приспособлен для обработки принятых аудиосигналов с водяными знаками для получения специфичной для приемника информации для каждого принятого аудиосигнала с водяными знаками. Кроме того, специфичная для приемника информация зависит от внедренных водяных знаков, внедренных в принятые аудиосигналы с водяными знаками. Кроме того, это устройство содержит средство предоставления информации направления для предоставления информации направления на основании специфичной для приемника информации для каждого принятого аудиосигнала с водяными знаками.
В одном из вариантов осуществления изобретения описан способ, используемый для определения информации направления, например, направления прихода (DoA) аудиосигнала, воспроизведенного громкоговорителем. Сигнал действует в качестве несущей для неслышимого сигнала водяного знака, который был сгенерирован в частотно-временной области. Его записывают массивом микрофонов, содержащим по меньшей мере два микрофона. После этого записи подвергают дополнительной обработке с целью обнаружения внедренного сигнала водяного знака. После того, как водяной знак восстановлен, он может использоваться для оценки направления источника звука относительно ориентации массива. В зависимости от применения, эта концепция может быть дополнительно приспособлена и применена для компоновки, содержащей произвольное количество громкоговорителей.
В одном из вариантов осуществления изобретения процессор сигналов содержит модуль анализа для преобразования принятых аудиосигналов с водяными знаками из временной области в частотно-временную область для получения сигнала передачи частотно-временной области, содержащего множество сигналов поддиапазона. В одном из вариантов осуществления изобретения процессор сигналов может быть приспособлен для определения комплексного числа в качестве специфичной для приемника информации. Например, это комплексное число может указывать значение комплексного коэффициента или усредненного комплексного коэффициента аудиосигнала с водяными знаками, записанного одним из аудиоприемников. В еще одном варианте осуществления изобретения процессор сигналов может быть приспособлен для определения информации фазы, в качестве специфичной для приемника информации. Например, этой информацией фазы может являться значение фазы или усредненное значение фазы аудиосигнала с водяными знаками, записанного одним из аудиоприемников. В еще одном варианте осуществления изобретения процессор сигналов может быть приспособлен для определения значения амплитуды или усредненного значения амплитуды аудиосигнала с водяными знаками, записанного одним из аудиоприемников, в качестве специфичной для приемника информации.
Согласно одному из вариантов осуществления изобретения, процессор сигналов приспособлен для определения усредненного значения фазы в качестве информации фазы, на основании определенного усредненного комплексного коэффициента. Процессор сигналов может быть приспособлен для генерации усредненного комплексного коэффициента посредством определения усредненного периодического блока, содержащего обработанные комплексные коэффициенты сигнала поддиапазона.
В одном из вариантов осуществления изобретения процессор сигналов приспособлен для определения усредненных комплексных коэффициентов посредством объединения по меньшей мере двух обработанных комплексных коэффициентов сигнала поддиапазона, при этом обработанные комплексные коэффициенты имеют равные значения фазы или значения фазы, которые отличаются не более, чем на 0,5 радиана. Кроме того, процессор сигналов может быть приспособлен для генерации обработанных комплексных коэффициентов посредством изменения значения фазы комплексного коэффициента на предопределенное число, например, на 180°, когда в качестве схемы модуляции используется диаметрально противоположная двоичная фазовая манипуляция (BPSK), или на надлежащее значение фазы в зависимости от используемой схемы модуляции и от известной внедренной последовательности.
Согласно одному из вариантов осуществления изобретения, процессор сигналов приспособлен для определения позиции попадания в синхронизацию, которая указывает позицию комплексного коэффициента, кодирующего первый бит сигнатуры водяного знака.
Средство предоставления информации направления может быть приспособлено для использования значений фазы для определения и предоставления информации направления. Кроме того средство предоставления информации направления может быть приспособленным для предоставления вектора направления прихода в качестве информации направления.
Кроме того, предложен способ предоставления информации направления. Этот способ содержит этапы, на которых принимают аудиосигналы с водяными знаками, причем каждый принятый аудиосигнал с водяными знаками содержит внедренный водяной знак, обрабатывают по меньшей мере два принятых аудиосигнала с водяными знаками, записанных по меньшей мере двумя аудиоприемниками в различных пространственных позициях, для определения специфичной для приемника информации для каждого принятого аудиосигнала с водяными знаками, при этом специфичная для приемника информация зависит от внедренных водяных знаков, внедренных в принятые аудиосигналы с водяными знаками, и предоставляют информацию направления на основании специфичной для приемника информации для каждого принятого аудиосигнала с водяными знаками.
Кроме того, предложено устройство для оценки пространственной позиции. Это устройство содержит устройство для предоставления информации направления согласно одному из вариантов осуществления изобретения и средство оценки позиции для оценки позиции устройства для оценки пространственной позиции, при этом средство оценки позиции приспособлено для оценки позиции устройства для оценки пространственной позиции на основании информации направления, предоставленной устройством для предоставления информации направления.
Концепция оценки пространственной позиции основана на определении позиции массива микрофонов в пространстве при записи при условии, что имеется достаточное количество громкоговорителей, и что их пространственные позиции являются известными. Например, для определения позиции массива микрофонов в общей плоскости могут использоваться три громкоговорителя. Следует упомянуть, что предложенная концепция не ограничена определением азимута. В дополнение к этому, может быть произведена оценка возвышения в зависимости от используемого способа оценки направления.
Кроме того, предложен способ оценки пространственной позиции. Этот способ содержит этапы, на которых принимают аудиосигналы с водяными знаками посредством использования массива из по меньшей мере двух аудиоприемников, причем каждый принятый аудиосигнал с водяными знаками содержит внедренный водяной знак; обрабатывают по меньшей мере два принятых аудиосигнала с водяными знаками, записанных по меньшей мере двумя аудиоприемниками в различных пространственных позициях, для определения специфичной для приемника информации для каждого принятого аудиосигнала с водяными знаками, при этом специфичная для приемника информация зависит от внедренных водяных знаков, внедренных в принятые аудиосигналы с водяными знаками; предоставляют информацию направления на основании специфичной для приемника информации для каждого принятого аудиосигнала с водяными знаками; и оценивают позицию массива из по меньшей мере двух аудиоприемников, при этом позицию определяют на основании информации направления.
Примерами возможных областей применения являются, например, игрушки, которые могут реагировать на воспроизведение некоторого аудиосигнала, например, двигающаяся кукла может двигать своей головой по направлению к телевизору при показе некоторого телевизионного сериала.
Еще одним примером применения является калибровка системы воспроизведения: настоящее изобретение может использоваться для автоматической калибровки системы воспроизведения, например, установки для организации телеконференций или системы домашнего кинотеатра, во время уже проходящего сеанса конференц-связи или во время воспроизведения аудиоэлемента. В этом случае отсутствует необходимость в предыдущей калибровке.
Кроме того, каналы аудиосигнала могут быть регулированы либо для усиления, либо для ослабления звука из некоторых громкоговорителей, расположенных в некоторых позициях, в зависимости от предоставленной информации направления. Кроме того, система может проинструктировать пользователя о том, как следует оптимально разместить громкоговорители акустической системы в зависимости от предоставленной информации направления.
Еще одним примером применения является вышеописанное устройство для оценки пространственной позиции.
Предпочтительные варианты осуществления изобретения будут объяснены со ссылкой на чертежи, на которых изображено следующее:
на Фиг.1 показана принципиальная блок-схема устройства для предоставления информации направления согласно одному из вариантов осуществления изобретения,
на Фиг.2 проиллюстрировано устройство для предоставления информации направления в сценарии применения согласно одному из вариантов осуществления изобретения,
на Фиг.3a-3c проиллюстрирован водяной знак с растяжением по частоте и с растяжением по времени,
на Фиг.4 показан модулятор для генерации сигнала водяного знака,
на Фиг.5 изображено устройство генерации сигнала с водяными знаками,
на Фиг.6a-6b проиллюстрировано устройство для предоставления информации направления в дополнительных сценариях применения согласно вариантам осуществления изобретения,
на Фиг.7 проиллюстрированы компоненты устройства для предоставления информации направления согласно одному из вариантов осуществления изобретения,
на Фиг.8a приведен пример общего представления о местоположении коэффициентов на частотно-временной плоскости в случае использования избыточной дискретизации согласно одному из вариантов осуществления изобретения,
на Фиг.8b проиллюстрирован сигнал поддиапазона частотно-временной области, содержащий внедренные водяные знаки,
на Фиг.9a-9d изображены сигнатуры водяных знаков, блоки синхронизации, периодические блоки и усредненный блок синхронизации согласно одному из вариантов осуществления изобретения,
на Фиг.10 проиллюстрированы мультиплексированные водяные знаки согласно одному из вариантов осуществления изобретения,
на Фиг.11a-11b показаны принципиальные блок-схемы альтернативных вариантов реализации узла поддержки синхронизации,
на Фиг.11c показана принципиальная блок-схема коррелятора сигнатуры синхронизации,
на Фиг.12a показано графическое представление задачи нахождения совмещения по времени водяного знака,
на Фиг.12b показано графическое представление задачи идентификации начала сообщения,
на Фиг.12c показано графическое представление данных, используемых для синхронизации,
на Фиг.12d показано графическое представление концепции идентификации попадания в синхронизацию,
на Фиг.13a показано графическое представление примера сжатия по времени,
на Фиг.13b показано графическое представление примера поэлементного перемножения битов и последовательностей растяжения,
на Фиг.13c показано графическое представление выходного сигнала коррелятора сигнатуры синхронизации после усреднения по времени,
на Фиг.13d показано графическое представление выходного сигнала коррелятора сигнатуры синхронизации, отфильтрованного посредством автокорреляционной функции сигнатуры синхронизации,
на Фиг.14 проиллюстрировано соотношение периодических блоков, содержащих дифференциально декодированные биты, и периодических блоков, содержащих комплексные коэффициенты,
на Фиг.15a изображены комплексные векторы части аудиосигнала, и части сигнала водяного знака,
на Фиг.15b изображен усредненный комплексный вектор частей аудиосигнала, и усредненный комплексный вектор частей сигнала водяного знака,
на Фиг.15c проиллюстрировано интегрирование выборок на различных этапах,
на Фиг.15d проиллюстрированы два проинтегрированных вектора комплексных коэффициентов различных поддиапазонов,
на Фиг.16 проиллюстрированы шесть микрофонов, расположенных вдоль осей декартовой системы координат,
на Фиг.17 показано определение азимута в плоскости xy согласно одному из вариантов осуществления изобретения,
на Фиг.18a-18d изображены векторы направления прихода, определенные согласно одному из вариантов осуществления изобретения,
на Фиг.19 проиллюстрирована оценка позиции согласно одному из вариантов осуществления изобретения,
на Фиг.20a-20b изображены задачи оценки позиции и их решения,
на Фиг.21 проиллюстрировано устройство для оценки позиции согласно одному из вариантов осуществления изобретения, и
на Фиг.22 проиллюстрировано устройство для оценки пространственной позиции согласно одному из вариантов осуществления изобретения.
1. Устройство для предоставления информации направления согласно Фиг.1
На Фиг.1 проиллюстрировано устройство 100 для предоставления информации направления на основании воспроизведенного аудиосигнала с внедренным водяным знаком согласно одному из вариантов осуществления изобретения. Устройство 100 содержит процессор 110 сигналов. Процессор 110 сигналов приспособлен для обработки по меньшей мере двух принятых аудиосигналов rx1, rx2 с водяными знаками, записанных по меньшей мере двумя аудиоприемниками в различных пространственных позициях. Эти по меньшей мере два аудиоприемника приспособлены для записи звуковых волн воспроизведенного аудиосигнала для получения по меньшей мере двух принятых аудиосигналов с водяными знаками. Каждый принятый аудиосигнал rx1, rx2 с водяными знаками содержит внедренный водяной знак. Кроме того, процессор 110 сигналов приспособлен для обработки принятых аудиосигналов с водяными знаками для получения специфичной для приемника информации rsi1, rsi2 для каждого принятого аудиосигнала rx1, rx2. Специфичная для приемника информация rsi1, rsi2 зависит от водяных знаков, внедренных в принятые аудиосигналы rx1, rx2 с водяными знаками. Кроме того, устройство 100 для предоставления информации направления содержит средство 120 предоставления информации направления. Средство предоставления информации направления приспособлено для предоставления информации di направления на основании специфичной для приемника информации rsi1, rsi2 для каждого принятого аудиосигнала rx1, rx2.
2. Сценарий применения согласно Фиг.2:
На Фиг.2 проиллюстрирован сценарий, в котором устройство 100 для предоставления информации направления принимает два аудиосигнала rx1, rx2 с водяными знаками из двух аудиоприемников 221, 222. На Фиг.2 аудиосигнал awm, содержащий водяной знак, воспроизводится громкоговорителем 210 в виде звуковых волн sw. Звуковые волны sw записываются по меньшей мере двумя аудиоприемниками 221, 222, например, двумя микрофонами, для получения по меньшей мере двух принятых аудиосигналов rx1, rx2. Каждый принятый аудиосигнал rx1, rx2 содержит внедренный водяной знак.
Принятые аудиосигналы rx1, rx2 с водяными знаками затем вводят в процессор 110 сигналов устройства 100 для предоставления информации направления. Процессор 110 сигналов приспособлен для обработки принятых аудиосигналов rx1, rx2 с водяными знаками для получения специфичной для приемника информации rsi1, rsi2 для каждого принятого аудиосигнала rx1, rx2 с водяными знаками. Специфичной для приемника информацией может являться информация фазы, зависящая от водяного знака, содержащегося в принятых аудиосигналах с водяными знаками. Кроме того, информация фазы зависит от пространственной позиции аудиоприемников. Например, звуковая волна воспроизведенного аудиосигнала, содержащего водяной знак, может поступать в первый аудиоприемник 221 немного ранее, чем во второй аудиоприемник 222. Следовательно, водяной знак в первом принятом сигнале rx1 принимают немного раньше, чем во втором принятом сигнале rx2. В общем, оба принятых сигнала rx1, rx2 являются весьма схожими. Однако, поскольку оба сигнала являются немного смещенными по времени друг относительно друга, то преобразование обоих принятых сигналов rx1, rx2 из временной области в частотно-временную область приводит, как правило, к различным значениям фазы обоих сигналов частотной области для одного и того же поддиапазона частот и индекса времени.
Процессор 110 сигналов подает специфичную для приемника информацию rsi1, rsi2 средству 120 предоставления информации направления. Средство 120 предоставления информации направления приспособлено для предоставления информации di направления на основании специфичной для приемника информации rsi1, rsi2 для каждого принятого аудиосигнала rx1, rx2. Например, информация di направления может быть предоставлена на основании информации фазы. Значение первой фазы первого принятого сигнала rx1 и значение второй фазы второго принятого сигнала rx2 могут быть обработаны, например, путем вычисления разности фаз. На основании вычисленной разности фаз средство 120 предоставления информации направления может определять информацию di направления. Например, могут быть определены возможные направления, откуда могут исходить звуковые волны воспроизведенного аудиосигнала.
3. Генерация водяного знака:
Ниже, для предоставления информации уровня техники о водяных знаках, генерация водяного знака в кодере объяснена со ссылкой на чертежи, изображенные на Фиг.3a-5. Способы обеспечения водяных знаков, генерирующие водяной знак в частотно-временной области, представлены в заявках на европейские патенты, номера заявок № 10154953.3, № 10154960.8, № 10154964.0, № 10154948.3, № 10154956.6 и № 10154951.7, которые включены в данный документ путем ссылки.
По существу, водяной знак представляет собой закодированную битовую сигнатуру, которая скрыта в другом сигнале, например, аудиосигнале. Эта битовая сигнатура может быть закодирована посредством использования множества диапазонов (полос) частот (поддиапазонов).
На Фиг.3a-3c проиллюстрированы двоичные значения сигнатуры водяного знака, которые должны быть кодированы в различных диапазонах частот. Несмотря на то, что водяной знак может использоваться для передачи информации, основное внимание в приведенном ниже описании будет сосредоточено на аспекте использования водяного знака для передачи сигнатуры водяного знака.
В общем, сигнатура водяного знака может представлять собой произвольную последовательность битов, например, следующую последовательность битов: [1, 1, -1, 1, -1, -1]. Соответствующая сигнатура 310 водяного знака проиллюстрирована на Фиг.3a.
Последовательность битов водяного знака расширяется по частоте посредством использования последовательности растяжения. Например, для растяжения сигнатуры водяного знака до m диапазонов частот может использоваться вектор растяжения, содержащий m значений. В простейшем случае может использоваться вектор растяжения, содержащий только лишь единицы, например, [1, 1, 1], а это приводит к тому, что сигнатура водяного знака копируется для каждого соответствующего диапазона частот. В более сложном варианте осуществления вектор растяжения может также содержать "минус единицы", например, [1, -1, 1], а это приводит к тому, что сигнатуру водяного знака инвертируют перед копированием для ее кодирования в соответствующем диапазона частот для соответствующих битов "-1". На Фиг.3b проиллюстрирована вышеупомянутая сигнатура водяного знака с растяжением по частоте посредством использования вектора растяжения [1, -1, 1, -1], для получения водяного знака 320 с растяжением по частоте.
Растяжение водяного знака с растяжением по частоте также может быть выполнено во временной области посредством использования вектора растяжения. Например, посредством использования вектора [1, -1] для растяжения во времени каждая из сигнатур водяных знаков с растяжением по частоте сначала может быть закодирована в ее исходном виде, а затем может быть инвертирована для ее кодирования. На Фиг.3c проиллюстрирована сигнатура 330 водяного знака с растяжением по частоте и с растяжением по времени, в которой растяжение во времени было выполнено посредством использования вектора растяжения [1, -1].
После растяжения по частоте и, возможно, по времени сигнатура водяного знака может быть повторно закодирована.
Различные последовательности битов могут быть дифференциально закодированы. Дифференциальный кодер может выполнять дифференциальное кодирование битов. Этот этап дает системе дополнительную устойчивость к сдвигам фазы вследствие перемещения или рассогласований гетеродина. Если b(i;j) представляет собой бит для i-того диапазона частот и j-того временного интервала, то выходной бит bdiff(i;j) равен
bdiff(i,j) = bdiff(i,j-1)·b(i,j).
В начале потока, то есть для j=0, bdiff(i,j-1) установлен в 1.
Модулятор 307 выполняет реальную модуляцию, то есть генерацию формы сигнала водяного знака в зависимости от двоичной информации, заданной на его входе. Более подробная схема соответствующего модулятора приведена на Фиг.4. Nf параллельных вводов 401-40Nf содержат потоки битов для различных поддиапазонов. Каждый бит потока каждого поддиапазона подвергают обработке блоком (411-41Nf) формирования битов. Выходными сигналами блоков формирования битов являются формы волны во временной области. Форма волны, генерируемая для j-того временного интервала и i-того поддиапазона, обозначенная как si;j(t), вычисляют на основании входного бита bdiff(i,j) следующим образом:
si,j(t) = bdiff(i,j)γ(i,j)·gi(t-j·Tb),
где γ(i;j) - весовой коэффициент, предоставленный узлом психоакустической обработки, Tb - интервал времени прохождения бита, а gi(t) - формирующая биты функция для i-того поддиапазона. Формирующую биты функцию получают из функции gi T(t) полосы частот модулирующих сигналов, модулированной по частоте косинусом
gi(t)=gi T(t)·cos(2πfit),
где fi - центральная частота i-того поддиапазона, и надстрочный индекс T означает передатчик. Функции полосы частот модулирующих сигналов могут быть различными для каждого поддиапазона. Если они выбраны идентичными, то возможен более эффективный вариант реализации в декодере.
Описанный выше процесс внедрения относится к схеме модуляции диаметрально противоположной BPSK, то есть, где закодированный бит информации просто изменяет знак формирующей биты функции. В альтернативном варианте два или более битов могут быть сгруппированы, и может использоваться созвездие модуляции более высокого порядка (например, квадратурная амплитудная модуляция (QAM) или М-позиционная фазовая манипуляция (M-PSK)). По-прежнему может применяться дифференциальное кодирование, как обычно делают, например, при квадратурной фазовой манипуляции (QPSK) с дифференциальным кодированием.
Формирование бита для каждого бита повторяют итерационным процессом, управляемым модулем 102 психоакустической обработки. Итерации могут быть необходимыми для точной настройки весов γ(i,j) для назначения водяному знаку как можно большего количества энергии, сохраняя его неслышимым.
Полный сигнал на выходе i-того фильтра 41i формирования битов равен
Формирующая биты функция gi T(t) полосы частот модулирующих сигналов обычно является ненулевой для промежутка времени, намного большего, чем Tb, хотя основная энергия сконцентрирована в пределах межбитового интервала. Пример можно видеть на Фиг.9a, где изображен график аналогичной формирующей биты функции полосы частот модулирующих сигналов для двух смежных битов. На Фиг.9a Tb=40 мс. Выбор Tb, а также форма функции, оказывают существенное влияние на систему. Фактически, более длинные символы обеспечивают более узкие частотные характеристики. Это является особенно полезным в реверберационных средах. Фактически, в таких сценариях сигнал с водяными знаками достигает микрофона по нескольким траекториям распространения, каждая их которых характеризуется различным временем распространения. Полученный в результате этого канал имеет сильную избирательность по частоте. При интерпретации во временной области полезными являются более длинные символы, поскольку эхо-сигналы с задержкой, сопоставимой с межбитовым интервалом, приводят к усиливающей интерференции, а это означает, что они увеличивают энергию принятого сигнала. Несмотря на это, более длинные символы также приводят к некоторым недостаткам; большие наложения могут приводить к межсимвольным помехам (ISI), и наверняка их труднее скрыть в аудиосигнале, вследствие чего модуль психоакустической обработки предоставляет меньше энергии, чем для более коротких символов.
Сигнал водяного знака получают путем суммирования всех выводов фильтров формирования битов
На Фиг.5 показана принципиальная блок-схема средства 500 вставки водяного знака. На стороне кодера в блоке 501 обработки (также обозначенном как генератор водяных знаков) генерируют сигнал 501b водяного знака из двоичных данных 501a и на основании информации 504, 505, обмен которой произведен с модулем 502 психоакустической обработки. Информация, предоставленная из блока 502, обычно гарантирует, что водяной знак является неслышимым. Водяной знак, сгенерированный генератором 501 водяных знаков, добавляют к аудиосигналу 506.
Как уже упомянуто выше, весовые коэффициенты γ(i,j) необходимы для вычисления форм волны si;j(t) для каждого поддиапазона. Весовые коэффициенты γ(i, j) предназначены для скрытия водяного знака, неслышимого в результирующем сигнале 507 с водяными знаками. Весовые коэффициенты γ(i,j) предоставляет модуль 502 психоакустической обработки, который содержит 3 части. Первой частью является модуль анализа, который преобразовывает аудиосигнал времени в частотно-временную область. Этот модуль анализа может выполнить параллельные процедуры анализа с различной разрешающей способностью по времени/частоте. После модуля анализа данные о времени/частоте передают в психоакустическую модель (PAM), в которой вычисляют пороги маскирования для сигнала водяного знака, исходя из психоакустических соображений. Пороги маскирования указывают количество энергии, которое может быть скрыто в аудиосигнале для каждого поддиапазона и временного интервала. Последним блоком в модуле 502 психоакустической обработки является модуль вычисления амплитуды. Этот модуль определяет усиления по амплитуде, которые должны быть использованы при генерации сигнала водяного знака для удовлетворения порогов маскирования, то есть, чтобы внедренная энергия была меньшей или равной энергии, определяемой порогами маскирования.
На Фиг.6a для воспроизведения аудиосигнала awm с водяными знаками используется одиночный громкоговоритель 610. В качестве первого этапа, сигнал wm водяного знака объединяется с аудиосигналом a посредством узла 605 объединения для получения аудиосигнала awm с водяными знаками. Сигнал wm водяного знака мог быть создан так, как описано со ссылкой на Фиг.3a-4. Сигнал awm с водяными знаками мог быть сгенерирован генератором водяных знаков так, как описано со ссылкой на Фиг.5. Например, сигнал wm водяного знака мог быть добавлен к аудиосигналу a.
Аудиосигнал awm с водяными знаками, полученный в результате объединения, выполненного узлом 605 объединения, затем воспроизводят при помощи громкоговорителя 610 и записывают датчиками 621, 622,..., 62N, например, N микрофонами из массива микрофонов, получая N сигналов s1, s2,..., sN. Записанные сигналы s1, s2,..., sN не только содержат сигналы с водяными знаками из громкоговорителя, но также содержат и создающий помехи шум, например, от говорящих людей в комнате и вследствие эффектов, вызванных реверберацией. Записанные сигналы s1, s2,..., sN затем вводят в устройство 100 для предоставления информации направления согласно варианту осуществления. Устройство 100 определяет и выводит информацию направления, например, оно может определять и выводить направление прихода (DoA).
Однако в других конфигурациях множественные громкоговорители 611, 612,..., 61N могут быть приспособлены для вывода множественных сигналов awm1, awm2,..., awmM с водяными знаками. Это проиллюстрировано на Фиг.6b. Различные сигналы wm1, wm2,..., wmM водяных знаков добавляют к аудиосигналам a1, a2,..., aM, например, панорамируемые каналы аудиоэлемента используют для воспроизведения в системе домашнего кинотеатра. Обработка для данного сценария является аналогичной той ситуации, когда сигнал с водяными знаками воспроизводит только один громкоговоритель.
4. Устройство для предоставления информации направления согласно Фиг.7:
На Фиг.7 проиллюстрировано устройство 100 для предоставления информации направления согласно варианту осуществления. Проиллюстрировано множество принимаемых аудиосигналов s1, s2,..., sN с водяными знаками, например, сигналов, которые могли быть записаны микрофонами 621, 622..., 62N, изображенными на Фиг.6. Принятые сигналы s1, s2,..., sN с водяными знаками, которые представлены во временной области, вводят в модули 711, 712,..., 71N анализа для преобразования в частотно-временную область и для нормализации.
4.1 Модули 711, 712,..., 71N анализа:
Для объяснения модулей 711, 712,..., 71N анализа рассмотрен один из принятых аудиосигналов с водяными знаками. Один из модулей анализа преобразовывает аудиосигнал с водяными знаками из временной области в частотно-временную область посредством использования блока фильтров для разложения сигнала. Вводом блока фильтров является соответствующий аудиосигнал с водяными знаками. Его выводом являются комплексные коэффициенты bi AFB(j) для i-той ветви или поддиапазона в момент j времени. Эти значения содержат информацию об амплитуде и фазе сигнала на центральной частоте fi и во время j·Tb.
Блок фильтров содержит Nf ветвей, по одной для каждого спектрального поддиапазона i. Каждая ветвь разделяется на верхнюю подветвь для синфазной составляющей и нижнюю подветвь для квадратурной составляющей поддиапазона i. Несмотря на то, что модуляция в генераторе водяных знаков и, следовательно, аудиосигнал с водяными знаками, являются чисто вещественнозначными, в приемнике необходим комплекснозначный анализ сигнала, поскольку вращения созвездия модуляции, вводимые каналом и несоответствиями синхронизации, являются неизвестными в приемнике. Ниже рассмотрим i-тую ветвь блока фильтров. Путем объединения синфазной и квадратурной подветви можно задать комплекснозначный модулирующий сигнал bi AFB(t) следующим образом

где * обозначает свертку, а  - импульсная характеристика фильтра нижних частот приемника для поддиапазона i. Обычно равна формирующей биты функции
- импульсная характеристика фильтра нижних частот приемника для поддиапазона i. Обычно равна формирующей биты функции  полосы частот модулирующих сигналов поддиапазона i в модуляторе для выполнения условия согласованного фильтра, но также возможны и другие импульсные характеристики.
полосы частот модулирующих сигналов поддиапазона i в модуляторе для выполнения условия согласованного фильтра, но также возможны и другие импульсные характеристики.
Для получения коэффициентов bi AFB(j) с частотой l=Tb, должна быть выполнена дискретизация непрерывного вывода bi AFB(t). Если бы правильная временная привязка битов была бы известна приемнику, то дискретизация с частотой l=Tb являлась бы достаточной. Однако, поскольку синхронизация битов еще неизвестна, то дискретизацию выполняют с частотой Nos/Tb, где Nos - коэффициент избыточной дискретизации блока фильтров для разложения сигнала. Путем выбора достаточно большого Nos (например, Nos=4) можно гарантировать, что по меньшей мере один цикл дискретизации является достаточно близким к идеальной побитовой синхронизации. Решение относительно наилучшего уровня избыточной дискретизации принимают во время процесса синхронизации, вследствие чего все данные с избыточной дискретизацией сохраняют до этого момента.
На выходе i-той ветви имеются коэффициенты bi AFB(j,k), где j указывает номер бита или момент времени, а k указывает позицию избыточной дискретизации в этом одиночном бите, где k=1; 2;...., Nos.
На Фиг.8a приведен пример общего представления о местоположении коэффициентов на частотно-временной плоскости. На Фиг.8a коэффициентом избыточной дискретизации является Nos=2. Высота и ширина прямоугольников указывают, соответственно, ширину полосы частот и промежуток времени части сигнала, представленной соответствующим коэффициентом bi AFB(j,k).
Если частоты fi поддиапазонов выбраны кратными некоторому интервалу Δf, то блок фильтров для разложения сигнала может быть эффективно реализован посредством использования быстрого преобразования Фурье (БПФ).
Нормализация комплексных коэффициентов, полученных для каждого диапазона частот, может быть выполнена следующим образом: Без потери общности и для упрощения описания ниже предполагают, что побитовая синхронизация известна, и что Nos=1. До нормализации имеются комплексные коэффициенты bi AFB(j). Поскольку какая-либо информация состояния канала недоступна (то есть, канал распространения неизвестен), то используют схему линейного суммирования сигналов равной мощности (EGC). Вследствие того, что канал имеет временную и частотную дисперсию, энергия отправленного бита bi(j) не только находится вблизи центральной частоты fi и момента j времени, но также и на смежных частотах и в соседние моменты времени. Следовательно, для более точной весовой обработки вычисляют дополнительные коэффициенты на частотах fi±nΔf, и используют их для нормализации коэффициента bi AFB(j). Например, если n=1, то

Нормализация для n>1 является прямым растяжением приведенной выше формулы. Нормализацию выполняют для каждого поддиапазона I и для каждого момента j времени.
Кроме того, в том случае, когда оценка направления прихода также использует амплитуду специфичной для приемника информации, то нормировочный множитель может быть вычислен только лишь для одного микрофона, а затем применен ко всем микрофонам.
На Фиг.8b проиллюстрирован сигнал поддиапазона, в котором две части WM1 и WM2 сигнала водяного знака подвергнуты временному мультиплексированию. Сигнал поддиапазона содержит часть звука первого аудиоисточника LS1 из первого громкоговорителя и часть звука второго аудиоисточника LS2 из второго громкоговорителя. Кроме того, сигнал поддиапазона также содержит либо часть WM1 сигнала водяного знака из первого громкоговорителя или, часть WM2 сигнала водяного знака из второго громкоговорителя.
4.2 Модуль 720 выбора:
Возвращаясь к рассмотрению Фиг.7, после преобразования в частотно-временную область и нормализации сигналы S1, S2,..., SN частотно-временной области вводят в модуль 720 выбора. Модуль 720 выбора определяет, какой из доступных сигналов S1, S2,..., SN следует использовать для выполнения последующей синхронизации. Для модуля 720 выбора существует несколько возможных вариантов выбора между сигналами. В варианте осуществления модуль 720 выбора приспособлен для выбора одного из входных сигналов S1, S2,..., SN случайным образом. Например, модуль выбора может выбрать сигнал S1 частотно-временной области. В альтернативном варианте осуществления модуль 720 выбора приспособлен для усреднения сигналов S1, S2,..., SN и использования усредненного сигнала.
4.3 Дифференциальный декодер 730:
Затем модуль 720 выбора подает результирующий сигнал в дифференциальный декодер 730. На входе дифференциального декодера 730 имеются нормализованные по амплитуде комплексные коэффициенты bi norm(j), которые содержат информацию о фазе составляющих сигнала на частоте fi и в момент j времени. Поскольку в передатчике биты закодированы дифференциально, то здесь должна выполняться обратная операция. Нежестко заданные биты (soft bits)  получают следующим образом: сначала вычисляют разность в фазе двух следующих друг за другом коэффициентов, а затем берут вещественную часть:
получают следующим образом: сначала вычисляют разность в фазе двух следующих друг за другом коэффициентов, а затем берут вещественную часть:
Это должно выполняться по отдельности для каждого поддиапазона, поскольку канал обычно вводит различные чередования фаз в каждом поддиапазоне.
Дифференциальный декодер 730 выполняет дифференциальное декодирование введенного сигнала для получения так называемых нежестко заданных битов следующим образом: сначала вычисляют разность в фазе двух следующих друг за другом коэффициентов, а затем берут вещественную часть фазы. Следует отметить, что полученные в результате этого нежестко заданные биты могут принимать любое вещественное значение, и никакое жесткое решение относительно бита еще не принимают. Поскольку нежестко заданные биты могут принимать любое вещественное значение, они не обязательно должны быть равными -1 или 1, но вместо этого могут иметь вещественное значение, отличное от -1 или 1, такое как, например, 0,92, -0,88, 0,97, и т.п.
Кроме того, при вводе в дифференциальный декодер сигнал поддиапазона может быть избыточно дискретизирован. Дифференциальный декодер учитывает избыточную дискретизацию при дифференциальном декодировании сигнала поддиапазона. Например, рассмотрим случай, в котором сигнал поддиапазона был избыточно дискретизирован с коэффициентом q избыточной дискретизации. Например, для i-того поддиапазона имеются коэффициенты bi norm(j,q), где j указывает номер бита или момент времени, а q указывает позицию избыточной дискретизации в этом одиночном бите, где q=1; 2;...., Nos. Затем посредством использования коэффициента q избыточной дискретизации вычисляют q нежестко заданных битов, применяя:

Затем дифференциальный декодер 730 подает поток нежестко заданных битов в модуль 740 интегрирования, который интегрирует поток нежестко заданных битов по времени по нескольким сигнатурам синхронизации для дополнительного повышения точности синхронизации.
4.4 Модуль 740 интегрирования:
Теперь будет приведено более подробное объяснение модуля 740 интегрирования. Когда используется только одна сигнатура wm1 водяного знака, созданная одиночным громкоговорителем, то производят многократную передачу этой сигнатуры wm1 водяного знака так, что когда последний бит сигнатуры wm1 водяного знака передан, то за ним следует первый бит сигнатуры wm1 водяного знака, и т.д. Соответствующая последовательность изображена на Фиг.9a. Если единственная используемая (например, с растяжением по времени) сигнатура wm1 водяного знака содержит N битов, то последовательность битов повторяют после N битов, и в этом случае единственная сигнатура водяного знака образует блок sync синхронизации длиной N битов.
Однако, как уже объяснено выше, система может содержать более одного громкоговорителя. Для получения оценки направления прихода для каждого громкоговорителя необходимо определить, какая часть записанного сигнала была излучена некоторым громкоговорителем. Следовательно, должно быть выполнено мультиплексирование сигналов водяных знаков. Существуют различные возможные способы, известные в области техники связи, а именно, множественный доступ с кодовым разделением каналов (CDMA), множественный доступ с частотным разделением каналов (FDMA) и множественный доступ с временным разделением каналов (TDMA). В одном из вариантов осуществления изобретения используется множественный доступ с временным разделением. Для определения того, какие части записанного сигнала относятся к некоторому громкоговорителю, в сигналы различных громкоговорителей внедряют различные сигнатуры водяных знаков. На Фиг.10 проиллюстрировано временное мультиплексирование для использования двух громкоговорителей и сигнатур синхронизации, содержащих шесть последовательностей.
Таким образом, различные громкоговорители могут передавать различные водяные знаки, например, два водяных знака wm1 и wm2, который могут быть подвергнуты временному мультиплексированию. Предположим, что количество битов обоих (например, с растяжением по времени) водяных знаков равно N. Сначала передают сигнатуру wm1 первого водяного знака. После этого передают сигнатуру второго водяного знака. Затем снова передают сигнатуру wm1 первого водяного знака, за которой следует передача сигнатуры wm2 второго водяного знака, и т.д. В этом случае блок sync синхронизации содержит водяные знаки wm1, wm2 и имеет 2·N битов. На Фиг.9b изображен описанный сценарий с двумя мультиплексированными сигнатурами водяных знаков.
Каждый блок синхронизации передают повторно. Предполагая, что синхронизирующая последовательность имеет Nsync битов, бит 1 равен биту Nsync+1 и равен биту 2·Nsync+1, и т.д. Бит 2 равен биту Nsync+2 и равен биту 2·Nsync+2, и т.д. Результирующей формулой для рассматриваемого поддиапазона i является следующая:
 для j=0, …, Nsync-1.
для j=0, …, Nsync-1.
В том случае, когда избыточная дискретизация была выполнена модулями 711, 712,..., 71N анализа, например, с коэффициентом Nos избыточной дискретизации, были созданы Nos дифференциально декодированных возможных значений битов  для каждого одного бита
для каждого одного бита  из рассматриваемого поддиапазона i. В результате получают следующее уравнение:
из рассматриваемого поддиапазона i. В результате получают следующее уравнение:
 для j=0,…, Nsync-1,
для j=0,…, Nsync-1,
где q=1, 2,..., Nos указывает позицию избыточной дискретизации в рассматриваемом бите.
Модуль интегрирования приспособлен для интегрирования нежестко заданных битов так, что суммируются множество нежестко заданных битов различных блоков синхронизации для улучшения устойчивости процесса декодирования водяного знака.
Сначала поток битов, содержащий дифференциально декодированные биты, разделяют на последовательные периодические блоки p1, p2, p3, содержащие Nsync битов. В этот момент модуль 740 интегрирования не имеет сведений о том, где начинается блок синхронизации. Однако это не является необходимым, поскольку периодичность дифференциально декодированного потока битов не зависит от начальной точки блока синхронизации, а вместо этого зависит от длины блока синхронизации. Для этого первый бит блока синхронизации может быть расположен где-либо в пределах периодического блока. Этот сценарий проиллюстрирован на Фиг.9c.
Для формирования блока p0 усредненной сигнатуры синхронизации суммируют соответствующие биты из различных периодических блоков. Например, суммируют первый бит из первого, второго и третьего периодов водяного знака, суммируют второй бит из первого второго и третьего периодов водяного знака и т.д. вплоть до бита Nsync из первого, второго и третьего периодов водяного знака. Каждый полученный в результате этого бит может быть разделен на количество усредненных периодических блоков. Это приводит к следующей формуле:
 где j=0, 1, 2,..., Nsync-1.
где j=0, 1, 2,..., Nsync-1.
В этой формуле i - рассматриваемый поддиапазон, K - количество усредненных блоков синхронизации, k - текущий рассматриваемый блок синхронизации, тогда как j - рассматриваемая позиция бита в периодических блоках. Усредненный блок синхронизации имеет Nsync битов: bi avg (0), bi avg (1), bi avg(2),..., bi avg(Nsync-1).
Первый бит сигнатуры первого водяного знака может быть расположен где-либо в усредненном блоке p0 синхронизации. На Фиг.9d проиллюстрирован сценарий, в котором показан усредненный блок p0 синхронизации.
Если анализ в модулях 711, 712... 71N анализа был проведен с коэффициентом избыточной дискретизации, равным Nos, то избыточную дискретизацию также учитывают. В этом случае генерируют усредненные значения для всех Nos дифференциально декодированных возможных значений  битов для каждого бита периодических блоков. Это приводит к следующей формуле:
битов для каждого бита периодических блоков. Это приводит к следующей формуле:
 где j=0, 1, 2,..., Nsync-1,
где j=0, 1, 2,..., Nsync-1,
где q=1, 2,..., Nos указывает позицию избыточной дискретизации в рассматриваемом бите.
Интегрирование, выполняемое модулем 740 интегрирования, создает усредненные нежестко заданные биты или в случае избыточной дискретизации множество из Nos возможных значений нежестко заданных битов для каждого из битов усредненного блока p0 синхронизации.
В дальнейших вариантах осуществления изобретения, где речевые сигналы действуют в качестве носителей водяных знаков, интегрирование является особенно важным, поскольку они часто содержат промежутки без сигнала водяного знака. Посредством этого обычно сокращают ошибки, существующие в потоке нежестко заданных битов, при выполнении интегрирования по времени.
4.5 Модуль 750 синхронизации:
После того, как поток битов был проинтегрирован по времени, модуль 740 интегрирования подает интегрированный поток нежестко заданных битов в модуль 750 синхронизации, который выполняет надежную синхронизацию. В более подробном изложении, модуль 750 синхронизации выполняет корреляцию с внедренной сигнатурой синхронизации. В результате этого получают позицию попадания в синхронизацию. Теперь будет приведено более подробное объяснение синхронизации в модуле 750 синхронизации.
Задача модуля 750 синхронизации состоит в нахождении совмещения по времени одного или большего количества водяных знаков в пределах усредненном блока синхронизации.
Задача синхронизации декодера с закодированными данными является двоякой. На первом этапе блок фильтров для разложения сигнала должен быть совмещен с закодированными данными, а именно, формирующие биты функции gi T(t), используемые при синтезе в модуляторе, должны быть совмещены с фильтрами gi R(t), используемыми для анализа. Эта задача проиллюстрирована на Фиг.12a, где фильтры для разложения сигнала являются идентичными фильтрам синтеза. В верхней части видны три бита. Для простоты формы волны для всех трех битов изображены не в масштабе. Сдвиг по времени между различными битами равен Tb. В нижней части проиллюстрирована задача синхронизация в декодере: фильтр может быть применен в различные моменты времени, однако, только кривая 1299a является правильной и позволяет извлекать первый бит с наилучшим отношением сигнал-шум (SNR) и отношением сигнал-помеха (SIR). Неправильное совмещение фактически привело бы к ухудшению обоих отношений: SNR и SIR. Эту первую задачу совмещения именуют "побитовой синхронизацией". После того, как побитовая синхронизация была достигнута, может производиться оптимальное извлечение битов. Однако также может потребоваться знание того, где начинается сигнатура водяного знака. Эта задача проиллюстрирована на Фиг.12b, и его именуют синхронизацией сообщения. В потоке декодированных битов только та исходная позиция, которая отмечена жирной стрелкой 1299b, является правильной и позволяет декодировать k-тое сообщение.
Для объяснения основной концепции синхронизации, сначала приведена ссылка на систему, в которой только один громкоговоритель выводит одну сигнатуру водяного знака. Следовательно, усредненный блок синхронизации содержит только лишь биты одной сигнатуры водяного знака. Сигнатура водяного знака также может именоваться сигнатурой синхронизации.
Кроме того, приведена ссылка на термин "синхронизирующая последовательность". Сигнатура синхронизации может содержать множество синхронизирующих последовательностей. В простейшем случае синхронизирующая последовательность может содержать всего лишь один бит. Однако также возможно, что сигнатура синхронизации содержит множество битов.
Сначала разрешают синхронизацию сообщения. Предполагают, что сигнатура синхронизации составлена из Ns синхронизирующих последовательностей в заданном порядке, которые непрерывно и периодически внедрены в аудиосигнал с водяными знаками. Модуль 750 синхронизации способен извлекать совмещение по времени синхронизирующих последовательностей.
Модуль синхронизации может идентифицировать начало каждой сигнатуры синхронизации путем нахождения совмещения по времени синхронизирующих последовательностей. Позиции во времени, в которых начинается новая сигнатура синхронизации, именуются попаданиями в синхронизацию.
Блоки обработки из модуля синхронизации изображены на фигурах 11a и 11b. Узел поддержки синхронизации выполняет побитовую синхронизацию и синхронизацию сообщения за раз путем анализа вывода коррелятора 1201 сигнатуры синхронизации. Данные в частотно-временной области 204 предоставляет модуль анализа. Поскольку побитовая синхронизация еще недоступна, модуль анализа выполняет избыточную дискретизацию данных с коэффициентом Nos.
Пример входных данных приведен на Фиг.12c. Для этого примера взяты Nos=4, Nt=2 и Ns=3. И вновь, Nos указывает коэффициент избыточной дискретизации, Nt указывает коэффициент растяжения по времени, а Ns указывает количество синхронизирующих последовательностей. Таким образом, другими словами, сигнатура синхронизации состоит из трех последовательностей (обозначенных как a, b и c). Растяжение по времени, в этом случае с последовательностью растяжения ct=[1 1]T, просто повторяет каждый бит дважды во временной области.
Точные попадания в синхронизацию обозначены стрелками и соответствуют началу каждой сигнатуры синхронизации. Период сигнатуры синхронизации равен Nt·Nos·Ns = Nsbl, который равен 2·4·3 = 24.
Вследствие периодичности усредненного блока синхронизации, достаточно только лишь рассмотреть усредненный блок синхронизации, который выводится модулем 740 интегрирования. Блок синхронизации должен содержать (или обычно содержит) одно попадание в синхронизацию, как изображено на Фиг.12d. Каждый из битов усредненного блока синхронизации является возможным попаданием в синхронизацию. На Фиг.12d усредненный блок синхронизации проиллюстрирован на чертежах в продублированном виде только лишь в иллюстративных целях. Задача блока 1201 состоит в вычислении степени правдоподобия для каждого возможного бита блока синхронизации. Эту информацию затем подают в блок 1204, который вычисляет попадания в синхронизацию.
Для каждого из Nsbl возможных позиций синхронизации коррелятор сигнатуры синхронизации вычисляет степень правдоподобия, причем последняя является тем большей, чем более вероятным является то, что совмещение по времени было найдено (как побитовая синхронизация, так и частичная или полная синхронизация сообщения). Этапы обработки изображены на Фиг.11c.
Соответственно, может быть получена последовательность 1201a значений правдоподобия, связанная с различными вариантами позиционирования. Блок 1301 выполняет сжатие по времени, то есть умножает каждый из Nt битов на последовательность ct растяжения по времени, а затем суммирует их. Это выполняют для каждого из Nf поддиапазонов частот.
На Фиг.13a показан пример. Взяты те же самые параметры, которые были описаны в предыдущем разделе, а именно Nos=4, Nt=2 и Ns=3. Отмечена возможная позиция синхронизации. Из этого бита блок 1301 берет Nt·Ns со сдвигом Nos и выполняет сжатие по времени с помощью последовательности ct, в результате чего остаются Ns битов.
На этапе 1302 выполняют поэлементное перемножение битов с Ns последовательностями растяжения (см. Фиг.13b).
На этапе 1303 выполняют сжатие по частоте, а именно, каждый бит перемножают с последовательностью cf растяжения, а затем суммируют по частоте.
В этой точке, если позиция синхронизации была правильной, то имеются Ns декодированных битов. Поскольку эти биты неизвестны приемнику, то блок 1304 вычисляет степень правдоподобия, беря абсолютные значения Ns значений и сумм.
В принципе, вывод блока 1304 является некогерентным коррелятором, который производит поиск сигнатуры синхронизации. Фактически, при выборе малого Ns, а, именно режим частичной синхронизации сообщения, можно использовать синхронизирующие последовательности (например, a, b, c), которые являются взаимно ортогональными. При этом, когда коррелятор некорректно совмещен с сигнатурой, его вывод будет очень малым, в идеальном случае равным нулю. При использовании режима полной синхронизации сообщения рекомендуется использовать как можно больше ортогональных синхронизирующих последовательностей, насколько это возможно, и затем создавать сигнатуру путем осторожного выбора порядка их использования. В этом случае одна и та же теория может быть применена при поиске последовательностей растяжения, с хорошими автокорреляционными функциями. Когда коррелятор имеет лишь небольшое рассогласование, то вывод коррелятора не будет равным нулю даже в идеальном случае, но так или иначе будет меньшим по сравнению с идеальным совмещением, поскольку фильтры для разложения сигнала не могут оптимально регистрировать энергию сигнала.
Этот блок вычисления попаданий в синхронизацию анализирует вывод коррелятора сигнатуры синхронизации для принятия решения о том, где находятся позиции синхронизации. Поскольку система является довольно устойчивой к рассогласованиям до Tb/4, а Tb обычно берут равным, приблизительно, 40 мс, то можно интегрировать вывод 1201 во времени для обеспечения более устойчивой синхронизации. Возможная реализация этого обеспечивается посредством фильтра с бесконечной импульсной характеристикой (IIR), применяемого во времени с экспоненциально затухающей импульсной характеристикой. В альтернативном варианте может быть применен традиционный фильтр на основе скользящего среднего с конечной импульсной характеристикой (FIR). После того, как усреднение было выполнено, выполняют вторую корреляцию по отличным Nt·Ns (“выбор другого позиционирования”). Фактически, желательно использование информации о том, что автокорреляционная функция функции синхронизации является известной. Это соответствует средству оценки максимального правдоподобия. Эта идея показана на Фиг.13c. Кривая показывает вывод блока 1201 после интегрирования по времени. Одним возможным вариантом определения попадания в синхронизацию является просто нахождение максимума этой функции. На Фиг.13d видна та же самая функция (изображенная черным), отфильтрованная автокорреляционной функцией сигнатуры синхронизации. Полученная в результате этого функция обозначена более широкой линией. В этом случае максимум более резко выражен и дает позицию попадания в синхронизацию. Эти два способа являются весьма схожими для высокого SNR, но второй способ работает намного лучше в режимах с более низким SNR. После того, как попадания в синхронизацию были найдены, сведения о них подают в средство 202 извлечения водяного знака, которое декодирует данные.
Более одной сигнатуры водяного знака:
В системе также могут использоваться две или более сигнатур водяных знаков, выведенных различными громкоговорителями, при этом сигнатуры водяных знаков являются мультиплексированными по времени. Такие сигнатуры водяных знаков с временным мультиплексированием проиллюстрированы на Фиг.10. В этом случае модуль 750 синхронизации производит поиск каждой из внедренных сигнатур водяных знаков по отдельности. Следовательно, он обнаруживает такое количество позиций попадания в синхронизацию, которое равно количеству используемых (попаданий) громкоговорителями и различными сигналами водяных знаков и доставляет эти позиции попадания в синхронизацию в средство 760 оценки направления.
Согласно этому, вышеописанную концепцию обнаружения позиции попадания в синхронизацию сигнатуры синхронизации многократно применяют для каждого водяного знака. Таким образом, для каждого водяного знака определяют позицию попадания в синхронизацию в усредненном блоке синхронизации. Определение позиции попадания в синхронизацию каждого водяного знака выполняют многократно, как объяснено со ссылкой на Фиг.11a-13d, для каждого из водяных знаков, при этом, в качестве сигнатуры синхронизации используют сигнатуру водяного знака из рассматриваемого водяного знака.
Затем записанный сигнал разделяют на M сегментов, где каждый сегмент M принадлежит к некоторому водяному знаку некоторого громкоговорителя. Затем выполняют оценку направления прихода для каждого сегмента. В результате, средство 760 оценки направления имеет M выводов, каждый из которых представляет направление прихода звука, излученного некоторым громкоговорителем.
Модуль 750 синхронизации предоставляет одно или более позиций попадания в синхронизацию в усредненном блоке синхронизации и доставляет позицию попадания в синхронизацию в средство 760 оценки направления.
В других вариантах осуществления изобретения может отсутствовать необходимость вычисления попаданий в синхронизацию, если водяной знак внедрен непрерывно, и используется только один громкоговоритель. Если дело обстоит не так, то синхронизация должна быть предопределена для нахождения начальной точки для оценки направления.
4.6 Модули 741, 742,..., 74N интегрирования:
Возвращаясь к рассмотрению Фиг.7, модули 711, 712,..., 71N анализа не только предоставляют сигналы S1, S2,..., SN частотно-временной области в модуль 720 выбора, но также и предоставляют сигналы S1, S2,..., SN в модули 741, 742,..., 74N интегрирования. В модули 741, 742,..., 74N интегрирования фактически доставляют нормализованные комплексные коэффициенты bi norm(j,q) (с избыточной дискретизацией), которые являются теми же самыми коэффициентами, которые обеспечиваются в модуль 720 выбора.
Однако перед подачей нормализованных комплексных коэффициентов с избыточной дискретизацией в модули 741, 742,..., 74N интегрирования дифференциальное декодирование не выполняют, поскольку необходима информация фазы, содержащаяся в комплексных коэффициентах, которая была бы утеряна после дифференциального декодирования. Вместо этого информация фазы сигнала должна быть сохранена. Посредством применения дифференциального декодирования эту информацию отбрасывают.
В каждом из модулей 741, 742,..., 74N интегрирования и для каждого поддиапазона i поток, содержащий нормализованные комплексные коэффициенты с избыточной дискретизацией, сначала разделяют на последовательные периодические блоки p11, p12, p13. Поток комплексных коэффициентов делят на блоки точно таким же образом, как поток дифференциально декодированных битов был разделен на периодические блоки p1, p2, p3. В соответствующих периодических блоках содержатся биты и выборки с соответствующими индексами времени (и позициями избыточной дискретизации).
Это объяснено со ссылкой на Фиг.7 и Фиг.14. На Фиг.7 сигнал S1 может быть подан в модуль 711 анализа. Модуль 711 анализа генерирует сигнал S1 частотно-временной области, содержащий множество сигналов поддиапазона, причем каждый из сигналов поддиапазона представлен как поток комплексных коэффициентов. В одном варианте осуществления модуль 720 выбора может выбрать S1, вследствие чего последующую синхронизацию выполняют на основании сигнала S1 частотно-временной области.
На Фиг.14 рассмотрен конкретный поддиапазон сигнала S1 частотно-временной области. Этот поддиапазон может содержать комплексные коэффициенты c(i,j), где i обозначает поддиапазон, а j обозначает индекс времени. Например, рассмотрим комплексные коэффициенты c(i,1), c(i,2), c(i,3), c(i,4), c(i,5) и c(i,6) из этого поддиапазона. Дифференциальное декодирование на основании этих значений дифференциальным декодером обеспечивает шесть нежестко заданных битов, а именно, d(i,1) на основании c(i,1) и выборки предшествующего поддиапазона; d(i,2) на основании c(i,2) и предшествующего c(i,1); d (i,3) на основании c(i,3) и предшествующего c(i,2); d(i,4) на основании c(i,4) и предшествующего c(i,3); d (i,5) на основании c(i,5) и предшествующего c(i,4); и d(i,6) на основании c(i,6) и предшествующего c(i,5). В d(i,j) i представляет поддиапазон, а j представляет индекс времени.
Комплексные коэффициенты диапазона i частот также подают в модуль 741 интегрирования из Фиг.7. Если модуль 740 интегрирования теперь делит поток дифференциально декодированных битов, содержащий нежестко заданные биты d(i,1), d(i,2), d(i,3), d(i,4), d(i,5), d(i,6) на первый периодический блок p1, содержащий d(i,1), d(i,2) и d(i,3), и на второй периодический блок p2, содержащий d(i,4), d(i,5) и d(i,6), то комплексные коэффициенты c(i,1), c(i,2), c(i,3), c(i,4), c(i,5) и c(i,6) также делятся на два блока, а именно, на первый блок, содержащий комплексные коэффициенты c(i,1), c(i,2) и c(i,3), и на второй блок, содержащий комплексные коэффициенты c(i,4), c(i,5) и c(i,6) (см. Фиг.14).
То же самое применимо и к другим сигналам SN частотно-временной области, сгенерированным другими модулями 71N анализа, даже в том случае, если эти сигналы не используются для дифференциального декодирования, выполняемого дифференциальным декодером.
Вышеописанная концепция равным образом применима в случае, если учитывается избыточная дискретизация. Если нежестко заданные биты b(i,j,q) с избыточной дискретизацией разделены на первый и второй периодические блоки p1 и p2, то комплексные коэффициенты c(i,j,q) также разделены на два блока p11 и p12. (Здесь i обозначает поддиапазон, j обозначает индекс времени, а q обозначает позицию избыточной дискретизации.) Если первый периодический блок p1 содержит нежестко заданный бит b(i,j,q), то первый блок p11 содержит комплексный коэффициент c(i,j,q) с теми же самыми индексами j,q. Если второй периодический блок p2 содержит нежестко заданный бит b(i,j,q), то второй блок p12 также содержит комплексный коэффициент c(i,j,q) с теми же самыми индексами j,q.
Таким образом, длина каждого из периодических блоков p11, p12, p13, сгенерированных модулями 741, 742,..., 74N интегрирования, соответствует длине периодических блоков p1, p2, p3, сгенерированных модулем 740 интегрирования.
Для формирования усредненного периодического блока для каждого поддиапазона i соответствующие комплексные коэффициенты усредняют. Например, соответствующие комплексные коэффициенты различных периодических блоков суммируют. Например, суммируют первый комплексный коэффициент из первого, второго и третьего периода синхронизации, суммируют второй комплексный коэффициент из первого, второго и третьего периода водяного знака, и т.д. Каждый полученный в результате этого комплексный коэффициент может быть поделен на количество усредненных периодических блоков. Это приводит к следующей формуле:
 где j=0, 1, 2,..., Nsync-1.
где j=0, 1, 2,..., Nsync-1.
В этой формуле K представляет количество усредненных периодических блоков из рассматриваемого поддиапазона i, k представляет текущий рассматриваемый периодический блок, тогда как j - позиция комплексного коэффициента в периодических блоках.
Учет избыточной дискретизации с коэффициентом Nos избыточной дискретизации приводит к следующей формуле:
 где j = 0, 1, 2,..., Nsync-1,
где j = 0, 1, 2,..., Nsync-1,
где q=1, 2,..., Nos указывает позицию избыточной дискретизации в рассматриваемом комплексном коэффициенте.
Усредненный периодический блок определяют для каждого диапазона частот и для каждого сигнала.
Этот эффект формирования усредненных периодических блоков объяснен со ссылкой на Фиг.15a и Фиг.15b. На Фиг.15a и Фиг.15b проиллюстрировано то, как интегрирование помогает получению требуемой информации фазы сигнала водяного знака.
При использовании нескольких громкоговорителей возникает известное явление, а именно, источник ложного сигнала. В этом сценарии излученный звук воспринимают так, как будто бы он был воспроизведен источником, расположенным между громкоговорителями. Это также имеет место при оценке направления прихода, поскольку аудиочасть записанного сигнала водяного знака удваивается пропорционально части водяного знака. Решением этой задачи является использование модулей 441, 442,..., 44N интегрирования, что теперь будет объяснено более подробно.
На Фиг.15a показаны комплексный вектор аудиочасти  и части
и части  сигнала водяного знака записанного и проанализированного сигнала Sn для некоторого частотного поддиапазона
сигнала водяного знака записанного и проанализированного сигнала Sn для некоторого частотного поддиапазона  и для различных временных интервалов i в предположении, что канал является идеальным. Здесь
и для различных временных интервалов i в предположении, что канал является идеальным. Здесь  представляет собой аудиочасть, излученную громкоговорителем
представляет собой аудиочасть, излученную громкоговорителем  и принятую микрофоном
и принятую микрофоном  . Следует отметить, что в примере с TDMA, рассматривая заданные временные интервалы, записанный сигнал содержит суперпозицию всех излученных аудиосигналов вместе с только одним сигналом водяного знака.
. Следует отметить, что в примере с TDMA, рассматривая заданные временные интервалы, записанный сигнал содержит суперпозицию всех излученных аудиосигналов вместе с только одним сигналом водяного знака.  представляет собой количество блоков синхронизации, которые должны быть интегрированы.
представляет собой количество блоков синхронизации, которые должны быть интегрированы.  представляет собой количество временных интервалов для одного блока полной синхронизации. Он содержит различные сигнатуры синхронизации для всех громкоговорителей:
представляет собой количество временных интервалов для одного блока полной синхронизации. Он содержит различные сигнатуры синхронизации для всех громкоговорителей:
где  - количество громкоговорителей, а
- количество громкоговорителей, а  - количество последовательностей из одной сигнатуры синхронизации. Комплексный вектор аудиопорции поворачивается (при переходе) из одного временного интервала в другой. Однако в отличие от этого, фаза сигнала водяного знака остается почти той же самой.
- количество последовательностей из одной сигнатуры синхронизации. Комплексный вектор аудиопорции поворачивается (при переходе) из одного временного интервала в другой. Однако в отличие от этого, фаза сигнала водяного знака остается почти той же самой.
На Фиг.15b проиллюстрирована ситуация после выполнения интегрирования. Комплексный вектор результирующего аудиосигнала  почти исчезает, тогда как вектор полученного водяного знака
почти исчезает, тогда как вектор полученного водяного знака  остается. Следовательно, в способах, которые обеспечивают оценку угла падения посредством использования информации фазы записанных входных сигналов, принимают данные, пригодные для получения правдоподобной оценки направления прихода для каждого громкоговорителя.
остается. Следовательно, в способах, которые обеспечивают оценку угла падения посредством использования информации фазы записанных входных сигналов, принимают данные, пригодные для получения правдоподобной оценки направления прихода для каждого громкоговорителя.
После интегрирования битов имеется проинтегрированный комплексный коэффициент для каждого принятого сигнала S1, S2,..., SN различных микрофонов 611, 612,..., 61N и для каждого диапазона i частот.
До настоящего момента не учитывалась избыточная дискретизация и не были объяснены некоторые принципы, на которых основано настоящее изобретение. Фазовая модуляция, используемая применительно к контексту этого варианта осуществления основана на некоторых фундаментальных идеях: предполагая, что каждый дискретизированный комплексный коэффициент соответствует позиции закодированного бита, значение фазы текущей выборки сравнивают со значением фазы предыдущей выборки. Рассмотрим, например, двоичную фазовую манипуляцию (BPSK). Если значения фазы обеих выборок являются идентичными, то это соответствует первому значению закодированного бита, например, значению закодированного бита, равному 1. Однако, если оба значения фазы отличаются например, на 180° (или на ±π), то это соответствует второму значению закодированного бита, например, значению закодированного бита, равному -1. Таким образом, для использования фазовой модуляции, например, двоичной фазовой манипуляции важно, чтобы выборки последовательных позиций битов имели либо одно и то же значение фазы, либо значение фазы, отличающееся на 180° (±π). Следовательно, при кодировании значений с фазовой модуляцией используется такая модуляция, что значения фазы выборок, соответствующих последовательным позициям битов, либо являются одинаковыми, либо отличаются на 180° в зависимости от значения закодированного бита.
Что касается некоторой сигнатуры водяного знака и некоторого диапазона частот, то громкоговоритель передает последовательность битов, закодированную путем фазовой модуляции. Все аудиоприемники, например, микрофоны, принимают последовательность битов с фазовой модуляцией. Разность фаз выборок, соответствующих последовательным позициям битов принятых аудиосигналов S1, S2,..., SN, должна быть (почти) одинаковой для всех сигналов из различных микрофонов. Если два микрофона одновременно принимают одну и ту же порцию аудиосигнала, то абсолютные значения фазы также должны быть идентичными. Однако, поскольку микрофоны расположены на расстоянии друг от друга (хотя они могут быть расположены лишь на небольшом расстоянии друг от друга), первый микрофон может принимать ту же самую порцию аудиосигнала немного раньше, чем второй микрофон, например, если первый микрофон расположен ближе к громкоговорителю, чем второй микрофон. Такая разница во времени двух принятых сигналов временной области приводит к разности в фазе двух принятых сигналов частотной области, например, сигналов частотно-временной области. Следовательно, разность фаз двух сигналов с водяными знаками, принятых двумя микрофонами, содержит информацию о позиции громкоговорителя, которым был излучен сигнал с водяными знаками, относительно местоположения двух микрофонов.
4.7 Средство 760 оценки направления:
Модули 741, 742,..., 74N интегрирования подают усредненные периодические блоки, определенные для каждого диапазона частот и для каждого сигнала, в средство 760 оценки направления, которое уже приняло позицию попадания в синхронизацию. Средство 760 оценки направления затем выполняет оценку направления прихода по части поступающих данных, на которую указывает позиция попадания в синхронизацию для каждого усредненного периодического блока.
Ниже внимание будет сосредоточено на ситуации, когда система содержит только лишь один громкоговоритель, передающий один водяной знак. Однако изобретение равным образом применимо и для того случая, когда передают более одного водяного знака. В этом случае предусмотрена одна позиция попадания в синхронизацию для каждого переданного водяного знака, и усредненный периодический блок затем делят на различные сегменты на основании позиции попадания в синхронизацию и на основании длины водяного знака. В этом случае применяют следующие концепции для каждой сигнатуры водяного знака и ее сегмента из усредненного периодического блока.
4.7.1 Отбрасывание выборок в неправильных позициях избыточной дискретизации:
На первом этапе средство оценки направления выполняет интегрирование выборок на основании усредненных периодических блоков. Для каждого бита рассматривают только ту позицию избыточной дискретизации, которую позиция попадания в синхронизацию указывает в качестве правильной позиции избыточной дискретизации. Все другие позиции избыточной дискретизации отбрасывают и не учитывают при интегрировании выборок.
4.7.2 Инвертирование битов -1:
Ниже бит за битом рассмотрена сигнатура водяного знака, начиная с первого бита сигнатуры первого водяного знака. Позиция соответствующего значения выборки в усредненном периодическом блоке указана позицией попадания в синхронизацию. Рассмотрены все биты сигнатуры водяного знака и значения соответствующих им выборок. В варианте осуществления, в котором в качестве схемы модуляции использована BPSK, значение бита, равное 1, указано равными значениями фазы текущей и предыдущей выборок, тогда как значение бита, равное -1, указано разностью фаз текущей и предыдущей выборок на 180°. Это проиллюстрировано на Фиг.15c. Изображенная последовательность значений выборок комплексных коэффициентов обозначена номером позиции 1510. Последовательность 1515 битов указывает закодированные биты с предположением, что используется дифференциальное кодирование. Модуль синхронизации теперь генерирует обработанную последовательность усредненных комплексных коэффициентов 1520 так, что все комплексные коэффициенты имеют приблизительно одинаковое значение фазы либо путем оставления комплексного коэффициента неизменным, либо посредством изменения значения его фазы на 180°. Решение о том, изменено ли значение фазы комплексного коэффициента на 180°, принимают на основании оценки последовательности закодированных битов водяного знака.
Например, на основании сигнатуры водяного знака устройство может вычислять, было ли значение бита закодировано посредством использования комплексного коэффициента с желательным первым значением фазы, или же значение бита было закодировано посредством использования комплексного коэффициента с нежелательным вторым значением фазы. Если было определено, что соответствующее значение выборки имеет нежелательное второе значение фазы, то значение фазы этого комплексного коэффициента изменяют на 180°.
Таким образом, несмотря на то, что перед обработкой комплексные коэффициенты диапазона частот имели либо первое абсолютное значение фазы, либо второе абсолютное значение фазы, отличающееся от первого значения фазы приблизительно на 180°, абсолютные значения фаз комплексных коэффициентов для некоторого диапазона частот обработанной последовательности усредненных комплексных коэффициентов теперь являются почти одинаковыми для всех комплексных коэффициентов применительно к некоторому сигналу частотной области для некоторого микрофона.
4.7.3 Интегрирование выборок
После корректировки фазы выборок все комплексные коэффициенты имеют значения фазы с приблизительно одинаковым значением. Модуль 750 синхронизации теперь выполняет последовательное интегрирование выборок по одной. Все остальные значения выборок (значения выборок с правильной позицией избыточной дискретизации), которые относятся к рассматриваемой сигнатуре водяного знака, интегрируют, то есть, усредняют, например, суммируют и делят на количество просуммированных выборок для получения усредненного комплексного коэффициента 1530.
Получены два эффекта: в качестве первого эффекта получена более устойчивое абсолютное значение фазы. Различные выборки могут подвергаться воздействию флуктуаций в канале, вследствие чего различные значения фазы имеют приблизительно одинаковые абсолютные значения фазы, но не в точности одинаковые значения фазы. В качестве второго эффекта, влияние аудиосигнала в усредненной выборке сведено к минимуму, тогда как влияние сигнатуры водяного знака усилено.
Таким образом, может быть определено (абсолютное) значение фазы для каждого из усредненных комплексных коэффициентов для различных микрофонов 611, 612,..., 61N и для каждого диапазона i частот. Значение фазы является усредненным значением фазы. Поскольку комплексные коэффициенты являются комплексными числами, то абсолютное значение фазы комплексного коэффициента может быть определено посредством определения значения фазы (аргумента) комплексного коэффициента.
Однако следует отметить, что комплексные коэффициенты различных диапазонов частот могут иметь различные значения фазы, как проиллюстрировано на Фиг.15d.
4.7.4 Определение направления:
На основании определенной информации фазы может быть определена информация направления различных типов на основании альтернативных концепций определения. Оценку направления прихода получают посредством использования способов, зависящих от конфигурации массива микрофонов и использования разностей фаз между входящими сигналами, например, способом направленного аудиокодирования (DirAC) или путем оценки параметров сигнала способами на основе вращательной инвариантности (ESPRIT).
В способе DirAC звуковое поле анализируют посредством использования сигналов микрофонов B-формата, содержащих всенаправленный сигнал w(t) и три дипольных сигнала x(t), y(t), z(t), которые соответствуют осям x, y и z в декартовой системе координат.
На Фиг.16 проиллюстрирована схема размещения микрофонов для шести микрофонов так, чтобы они образовывали три пары микрофонов. Предполагают, что первая пара микрофонов mx1, mx2, расположена на оси x декартовой системы координат. Вторая пара микрофонов my1, my2 размещена так, что, как можно предположить, она расположена на оси y декартовой системы координат. Кроме того, третья пара микрофонов mz1, mz2 размещена так, что, как можно предположить, она расположена на оси z декартовой системы координат.
Рассмотрим некоторый диапазон i частот. Определенное абсолютное значение фазы применительно к рассматриваемой сигнатуре водяного знака для рассматриваемого диапазона i частот именуют vx1 для микрофона mx1, vx2 для микрофона mx2, vy1 для микрофона my1, vy2 для микрофона my2, vz1 для микрофона mz1 и vz2 для микрофона mz2. В этом случае разности Δvx, Δvy и Δvz фаз могут быть вычислены следующим образом:
Δvx = vx1-vx2;
Δvy = vy1-vy2;
Δvz = vz1-vz2;
Определение азимутального угла:
В варианте осуществления азимутальный угол может быть вычислен на основании вычисленных значений фазы. Рассмотрим, например месторасположение микрофонов mx1 и mx2 в плоскости xy, как проиллюстрировано на Фиг.17. Указано расстояние d между этими двумя микрофонами. Необходимо задать угол φ, который задает направление источника звука, выводящего сигнатуру водяного знака, относительно плоскости xy. φ=0 соответствует волне, попадающей в микрофоны одновременно. То есть, в этом случае предполагают, что источник звука является равноотстоящим от mx1, также как и от mx2. Используют следующую формулу:
Δvx=(-2·π/λ)·d·sin(φ).
В этом уравнении λ - длина волны, и она задана как λ = c/fi, где c - скорость звука, а fi - центральная частота рассматриваемого поддиапазона. Как описано выше, fi может соответствовать fi в функции формирования битов для рассматриваемого поддиапазона. d представляет собой расстояние между двумя микрофонами m×1 и m×2, а φ представляет собой угол, указывающий направление прихода относительно плоскости xy, которое должно быть определено.
Кроме того sin(φ) равен:
sin(φ)=-Δvx·λ/(2·π·d) (I)
Таким образом может быть определено значение sin(φ).
Предполагают, что φ принимает значение в интервале ]-π, π]. Если sin(φ) равен -1 или 1, то φ может быть определен однозначно. Однако, если sin(φ) не равен -1 или 1, то φ может принимать одно из двух различных значений. Например, если sin(φ)=0, то φ равен либо 0, либо π.
Для разрешения этой неопределенности может использоваться информация из дополнительных микрофонов. Рассмотрим месторасположение микрофонов my1 и my2 в плоскости xy, как проиллюстрировано на Фиг.17. И вновь, указано расстояние d между этими двумя микрофонами. Это расстояние может быть идентичным расстоянию между микрофонами mx1 и mx2 или может быть иным. Необходимо задать угол β, который задает направление источника звука, выводящего сигнатуру водяного знака, относительно плоскости xy. β=0 соответствует волне, попадающей в микрофоны одновременно. То есть, в этом случае предполагают, что источник звука является равноотстоящим от mx1, также как и от mx2. Используют следующее уравнение:
Δvy=(-2·π/λ)·d·sin(β)
Это приводит к следующей формуле:
sin(β)=-Δvy·λ/(2·π·d).
В варианте осуществления изобретения, проиллюстрированном на Фиг.17, β=φ-π/2. (в других вариантах осуществления изобретения β может быть β=φ+π/2). Следовательно,
sin(β)=sin(φ-π/2=-cos(φ),
и, следовательно:
cos(φ)=Δvy·λ/(2·π·d) (II)
И вновь, если cos(φ) не равен -1 или 1, α может принимать одно из двух значений.
Путем вычисления sin(φ) согласно формуле (I) и вычисления cos(φ) согласно формуле (II), и посредством определения φ на основании sin(φ) и cos(φ), значение φ может быть определено однозначно.
Таким образом, угол φ, задающий направление прихода звуковой волны, содержащей сигнатуру водяного знака, может быть определен относительно плоскости xy и некоторого диапазона i частот.
Определение угла φ может быть повторено для каждого из множества различных диапазонов i частот. Для каждого диапазона частот получают угол φ, который должен быть приблизительно одинаковым для каждого диапазона частот. Однако помехи в отношении некоторых диапазонов частот могут влиять на правильность определенного значения угла φ, которое определяют на основании этих диапазонов частот. В варианте осуществления вычисляют среднее значение определенных значений угла φ. Например, вычисленные значения угла могут быть просуммированы и разделены на количество просуммированных для получения значения угла φ в качестве среднего значения.
Определение вектора направления прихода по азимутальному углу φ:
Вектор a направления прихода может быть вычислен следующим образом:
a=(cos(φ), sin(φ)).
Альтернативный вариант определения вектора направления прихода:
В варианте осуществления вектор направления прихода определяют на основании вычисленных значений фазы следующим образом.
Возвращаясь к рассмотрению Фиг.17, как объяснено выше, разности Δvx, Δvy и Δvz фаз для абсолютных значений фазы могут быть вычислены с применением следующих уравнений: Δvx=vx1-vx2; Δvy=vy1-vy2; и Δvz=vz1-vz2.
В варианте осуществления предполагают, что расстояние dx между микрофонами mx1 и mx2, расстояние dy между микрофонами my1 и my2 и расстояние dz между микрофонами mz1 и mz2 являются одинаковыми.
В этом случае Δvx, Δvy и Δvz образуют компоненты вектора a направления прихода, когда Δvx, Δvy и Δvz выражены в интервале ]-π; π]:
a=(Δvx, Δvy, Δvz),
который указывает направление источника звука.
В еще одном варианте осуществления расстояние dx между микрофонами mx1 и mx2, расстояние dy между микрофонами my1 и my2 и расстояние dz между микрофонами mz1 и mz2 не равны друг другу. В этом варианте осуществления отсутствует необходимость корректировки модифицированных разностей фаз для учета различных расстояний, например, путем применения поправочного коэффициента. Например, компоненты ax, ay и az могут быть определены согласно следующим уравнениям:
ax=(1/dx)·Δvx; ay=(1/dy) Δvy; az=(1/dz)·Δvz,
в результате чего получают следующий вектор направления прихода: a=(ax, ay, az).
В дальнейших вариантах осуществления изобретения может быть выполнена нормализация вектора a, например, путем умножения его компонентов на коэффициент k, равный, например,

Вектор направления прихода объяснен со ссылкой на Фиг.18a-18d. Для лучшего пояснения объяснена ситуация в двумерной плоскости xy. Предполагают, что расстояние dx между микрофонами mx1 и mx2 и расстояние dy между микрофонами my1 и my2 являются одинаковыми. Однако приведенные объяснения также применимы для трехмерного случая и для ситуаций, где расстояния между микрофонами не являются одинаковыми, но где разности Δvx и Δvy фаз были скорректированы, например, путем применения коэффициента расстояния.
Рассмотрим вектор a=(Δvx, Δvy, Δvz) направления прихода. Его компонентами Δvx, Δvy, Δvz являются разности фаз, полученные согласно описанным выше вариантам осуществления. В иллюстративных целях рассмотрены только лишь x- и y-компоненты вектора a'=(Δvx, Δvy).
На Фиг.18a рассмотрен двухкомпонентный вектор a'=(0,1) направления прихода.
x-компонента Δvx вектора равна 0, то есть, отсутствует какая-либо разность фаз относительно абсолютных значений фазы сигналов, принятых обоими микрофонами mx1 и mx2. Таким образом, соответствующая аудиоволна попадает в оба микрофона mxl и mx2 одновременно, и предполагают, что источник звука является равноотстоящим от обоих микрофонов mx1 и mx2. В результате, вектор a' направления прихода не является ни отрицательным, ни положительным.
y-компонента Δvy вектора равна 1. Поскольку Δvy=vy1-vy2, то это означает, что абсолютное значение vy1 фазы является большим, чем абсолютное значение vy2 фазы, и, следовательно, что соответствующая аудиоволна пришла в микрофон my1 раньше, чем в микрофон my2. Таким образом, вектор a' направления прихода указывает на положительное направление оси y.
На Фиг.18b рассмотрен двухкомпонентный вектор a'=(-1, 0) направления прихода.
y-компонента Δvy вектора равна 0, то есть, отсутствует какая-либо разность фаз относительно абсолютных значений фазы сигналов, принятых обоими микрофонами my1 и my2. Таким образом, соответствующая аудиоволна попадает в оба микрофона my1 и my2 одновременно, и предполагают, что источник звука является равноотстоящим от обоих микрофонов my1 и my2. В результате, вектор a' направления прихода не является ни отрицательным, ни положительным.
x-компонента Δvx вектора равна -1. Поскольку Δvx=vx1-vx2, то это означает, что абсолютное значение vx2 фазы является большим, чем абсолютное значение vx1 фазы, и, следовательно, что соответствующая аудиоволна пришла в микрофон mx2 раньше, чем в микрофон mx1. Таким образом, вектор a' направления прихода указывает на отрицательное направление оси y.
На Фиг.18c рассмотрен двухкомпонентный вектор a'=(1, 1) направления прихода.
x-компонента Δvx вектора равна 1. Поскольку Δvx=vx1-vx2, то это означает, что абсолютное значение vy1 фазы является большим, чем абсолютное значение vy2 фазы, и, следовательно, что соответствующая аудиоволна пришла в микрофон mx1 раньше, чем в микрофон mx2. Таким образом, вектор a' направления прихода указывает на положительное направление оси x.
y-компонента Δvy вектора равна 1. Поскольку Δvy=vy1-vy2, то это означает, что абсолютное значение vy1 фазы является большим, чем абсолютное значение vy2 фазы, и, следовательно, что соответствующая аудиоволна пришла в микрофон my1 раньше, чем в микрофон my2. Таким образом, вектор a' направления прихода указывает на положительное направление оси y.
Поскольку разности Δvx и Δvy фаз являются равными, и поскольку можно предположить, что соответствующая аудиоволна распространяется одинаково быстро как в направлении оси х, так и в направлении оси у, x-компонента и y-компонента вектора направления прихода являются равными по значению.
На Фиг.18d рассмотрен двухкомпонентный вектор a'=(2, 1) направления прихода.
x-компонента Δvx вектора равна 2. Поскольку Δvx=vx1-vx2, то это означает, что абсолютное значение vx1 фазы является большим, чем абсолютное значение vx2 фазы, и, следовательно, что соответствующая аудиоволна пришла в микрофон mx1 раньше, чем в микрофон mx2. Таким образом, вектор a' направления прихода указывает на положительное направление оси x.
y-компонента Δvy вектора равна 1. Поскольку Δvy=vy1-vy2, то это означает, что абсолютное значение vy1 фазы является большим, чем абсолютное значение vy2 фазы, и, следовательно, что соответствующая аудиоволна пришла в микрофон my1 раньше, чем в микрофон my2. Таким образом, вектор a' направления прихода указывает на положительное направление оси y.
Поскольку разности Δvx и Δvy фаз являются равными, и поскольку можно предположить, что соответствующая аудиоволна распространяется быстрее в направлении оси х, чем в направлении оси y, и что ее скорость в направлении оси х является в два раза большей, чем скорость в направлении оси у, то размер x-компоненты вектора направления прихода в два раза превышает размер y-компоненты.
Определение вектора направления прихода на основе множественных диапазонов частот:
Как объяснено выше, вектор направления прихода определяют на основании значений фазы для некоторого диапазона частот. В варианте осуществления вектор направления прихода вычисляют для множества диапазонов частот для получения множество векторов направления прихода. Затем может быть выполнена нормализация множества векторов диапазонов частот, например, путем умножения их компонентов на специфичные для вектора нормировочные множители для получения нормализованных векторов направления прихода. Например, для каждого диапазона частот специфичный для вектора нормировочный множитель n может быть определен, например, согласно следующей формуле:
 , где
, где  - центральная частота i-того поддиапазона.
- центральная частота i-того поддиапазона.
Затем может быть определен усредненный вектор направления прихода. Усреднение может быть обеспечено, например, путем суммирования множества векторов направления прихода и путем деления компонент полученного вектора на количество нормализованных векторов направления прихода, которые усредняются.
В варианте осуществления изобретения азимутальные углы и углы возвышения могут быть вычислены на основании определенного вектора направления прихода с использованием способов, применяемых в контексте направленного аудиокодирования (DirAC).
Альтернативный вариант оценки вектора направления прихода с использованием комплексной специфичной для приемника информации:
В еще одном варианте осуществления изобретения комплексные значения, относящиеся к рассматриваемой сигнатуре водяного знака для рассматриваемого диапазона i частот, могут использоваться для оценки направления прихода сигнала с использованием способа направленного аудиокодирования (DirAC).
Предположим, что Δpx обозначает разность между комплексными значениями, полученными из микрофонов mx1 и mx2, показанных на Фиг.16. Аналогичным образом получают Δpy и Δpz для осей y и z. Далее предположим, что p0 - среднее комплексных значений, полученных во всех микрофонах.
Вектор a направления прихода вычисляют из вектора Ia = (Iax, Iay, Iaz) действующей интенсивности, заданного следующим образом:
Iax =.5 Real(p0·conj(Δpx))
Iay =.5 Real(p0·conj(Δpy))
Iaz =.5 Real(p0·conj(Δpz)),
где Real() извлекает вещественную часть, а conj обозначает комплексное сопряжение и 5 обозначает 0,5.
Вектор направления прихода равен
A = -Ia/norm(Ia),
где norm() вычисляет норму L2 аргумента. Азимутальные углы и углы возвышения могут быть легко вычислены следующим образом:
азимут = atan (Iay/Iax)
возвышение = atan(norm(Ia),sqrt(Iax^2+Iay^2)),
где sqrt - квадратный корень, Iax^2 обозначает Iax2, а Iay^2 обозначает Iay2.
Оценка позиции узла записи
На Фиг.19 проиллюстрирована оценка позиции в двумерном сценарии. Здесь предполагают, что позиция громкоговорителей является известной. Кроме того, предполагают, что громкоговорители и массив микрофонов записи расположены в одной и той же плоскости.
Определяют вектор направления прихода для каждого из громкоговорителей согласно одному из вышеописанных вариантов осуществления. Вектор направления прихода для первого громкоговорителя указывает на первый громкоговоритель. Вектор направления прихода для второго громкоговорителя указывает на второй громкоговоритель.
По существу, вектор направления прихода указывает направление прихода звуковой волны из громкоговорителя, причем компоненты вектора могут быть выражены с привязкой к декартовой системе координат. Однако в вариантах осуществления оси системы координат определяются местоположением микрофонов: местоположение mx1 и mx2 задает ось x, а местоположение my1 и my2 задает ось y системы координат, к которым относится вектор направления прихода.
Если известна ориентация массива микрофонов, и если известны (абсолютные) позиции двух громкоговорителей, то в двумерном случае два вектора направления прихода являются достаточными для задания позиции массива микрофонов, это проиллюстрировано на Фиг.19.
В этом варианте осуществления изобретения устройство для оценки позиции приспособлено для вычисления вектора направления прихода для каждого громкоговорителя, выводящего звуковые волны, содержащие сигнатуры водяных знаков. Вычисляют первую линию в двумерной плоскости, которая является параллельной вектору направления прихода первого громкоговорителя, и которая пересекает позицию первого громкоговорителя. Кроме того, вычисляют вторую линию в двумерной плоскости, то есть, которая является параллельной вектору направления прихода второго громкоговорителя, и которая пересекает позицию второго громкоговорителя. Затем вычисляют точку пересечения первой и второй линий в двумерной плоскости, где эта точка пересечения определяет позицию массива микрофонов.
В других вариантах осуществления описанную концепцию применяют в средах, в которых массив микрофонов и громкоговорители не расположены в двумерной плоскости, применяя трехмерные векторы направления прихода (векторы направления прихода с тремя компонентами). В этих случаях предполагают, что местоположение громкоговорителей является известным. Устройство вычисляет линии, параллельные определенным векторам направления прихода, при этом вычисленные линии пересекают позицию громкоговорителя для громкоговорителя их вектора направления прихода. Точка, где пересекаются все вычисленные линии, является определенной позицией массива микрофонов.
В иллюстративных целях возвратимся к двумерному случаю. Если ориентация массива микрофонов неизвестна, то в этом случае двух векторов направления прихода для двух громкоговорителей недостаточно для определения позиции массива микрофонов. В этом сценарии может быть вычислен угол α между первым и вторым векторами направления прихода, но поскольку ориентация массива микрофонов и, следовательно, ориентация системы координат, определяемой массивом микрофонов, неизвестна, то позиция массива микрофонов не может быть однозначно определена, даже если была бы известна позиция громкоговорителя (например, выраженное с привязкой ко второй системе координат). Это проиллюстрировано на Фиг.20a.
Однако эта неопределенность может быть разрешена за счет использования третьего громкоговорителя, выводящего третью аудиоволну, содержащую сигнатуру водяного знака. Это объяснено со ссылкой на Фиг.20b. Если оценены направления прихода по меньшей мере трех громкоговорителей (M≥3), то также может быть определена пространственная позиция массива микрофонов. Соответствующее средство оценки позиции проиллюстрировано на Фиг.21. При использовании трех громкоговорителей предполагают, что громкоговорители и узел записи расположены в общей плоскости. Однако в приемнике должны быть известны пространственные позиции громкоговорителей. На основании этой информации позиция записи может быть получена путем решения системы нелинейных уравнений в средстве 800 оценки позиции.
В варианте осуществления изобретения из Фиг.20b устройство для оценки позиции вычисляет первый вектор направления прихода для первого громкоговорителя, второй вектор направления прихода для второго громкоговорителя и третий вектор направления прихода для третьего громкоговорителя. Затем может быть вычислен первый угол α между первым и вторым вектором направления прихода, и второй угол δ между вторым и третьим вектором направления прихода. Затем устройство для оценки решения определяет точку в двумерной плоскости так, что три линии, каждая из которых пересекает позицию громкоговорителя, и определенная точка имеют определенные угловые соотношения друг с другом. То есть, первая линия, пересекающая позицию первого громкоговорителя, и вторая линия, пересекающая позицию второго громкоговорителя, пересекаются в определенной точке так, что их угол пересечения равен первому углу. Вторая линия, пересекающая позицию второго громкоговорителя, и третья линия, пересекающая позицию третьего громкоговорителя, пересекаются в определенной точке так, что их угол пересечения равен второму углу. Эта определенная точка является позицией массива микрофонов.
В других вариантах осуществления средство оценки позиции определяет позицию массива микрофонов, ориентация которого является неизвестной в трехмерном случае, то есть для конфигурации, где громкоговорители и массив микрофонов не все расположены в двумерной плоскости. Определение обеспечивают на основании вышеописанной концепции посредством использования трехмерных векторов направления прихода, то есть, векторов направления прихода с тремя компонентами.
На Фиг.22 проиллюстрировано устройство для оценки пространственной позиции согласно варианту осуществления. Это устройство для оценки пространственной позиции содержит устройство 100 для предоставления информации направления согласно одному из вышеописанных вариантов осуществления, которое выполняет обработку принятых аудиосигналов rx1, rx2 с водяными знаками. Кроме того, устройство для оценки пространственной позиции содержит средство 300 оценки позиции для оценки позиции устройства для оценки пространственной позиции. Средство оценки позиции приспособлено для оценки позиции устройства для оценки пространственной позиции на основании информации направления, предоставленной устройством для предоставления информации направления.
Несмотря на то, что некоторые аспекты были описаны применительно к устройству, понятно, что эти аспекты также представляют собой описание соответствующего способа, где блок или устройство соответствуют этапу способа или признаку этапа способа. Аналогичным образом, аспекты, описанные применительно к этапу способа, также представляют собой описание соответствующего блока, элемента или признака соответствующего устройства.
Предложенный в настоящем документе разложенный сигнал может храниться на цифровом носителе информации или может быть передан в среде передачи, такой как, например, среда беспроводной передачи или среда проводной передачи, такая как, например, сеть Интернет.
В зависимости от некоторых требований реализации, варианты осуществления изобретения могут быть реализованы аппаратным обеспечением или программным обеспечением. Реализация может быть осуществлена посредством использования цифрового носителя информации, такого как, например, гибкий диск, универсальный цифровой диск (DVD), компакт-диск (CD), постоянное запоминающее устройство (ПЗУ), программируемое постоянное запоминающее устройство (ППЗУ), стираемое ППЗУ (СППЗУ), электрически стираемое ППЗУ (ЭСППЗУ) или флэш-память, на котором хранят считываемые при помощи электроники управляющие сигналы, взаимодействующие (или способные взаимодействовать) с программируемой компьютерной системой для выполнения соответствующего способа.
Некоторые варианты осуществления в соответствии с изобретением содержат невременный носитель данных, содержащий считываемые при помощи электроники управляющие сигналы, которые способны взаимодействовать с программируемой компьютерной системой для выполнения одного из описанных в данном документе способов.
В принципе, варианты осуществления настоящего изобретения могут быть реализованы в виде компьютерного программного продукта с программным кодом, при этом программный код действует так, что обеспечивает выполнение одного из способов при работе этого компьютерного программного продукте в компьютере. Например, программный код может храниться на машиночитаемом носителе.
Другие варианты осуществления содержат компьютерную программу для выполнения одного из описанных в данном документе способов, хранящуюся на машиночитаемом носителе.
Другими словами, вариантом осуществления способа, предложенного в настоящей заявке, следовательно, является компьютерная программа, имеющая программный код для выполнения одного из описанных в данном документе способов при выполнении этой компьютерной программы в компьютере.
Следовательно, еще одним вариантом осуществления способов, предложенных в настоящем изобретении, является носитель данных (цифровой носитель информации или считываемый компьютером носитель информации), содержащий записанную на нем компьютерную программу для выполнения одного из описанных в данном документе способов.
Следовательно, еще одним вариантом осуществления способа, предложенного в настоящем изобретении, является поток данных или последовательность сигналов, представляющие компьютерную программу для выполнения одного из описанных в данном документе способов. Этот поток данных или эта последовательность сигналов могут быть сконфигурированы, например, для их передачи через соединение передачи данных, например через Интернет.
Еще один вариант осуществления изобретения содержит средство обработки, например, компьютер или программируемое логическое устройство, сконфигурированные или приспособленные для выполнения одного из описанных в данном документе способов.
Еще один вариант осуществления изобретения содержит компьютер с установленной в нем компьютерной программой для выполнения одного из описанных в данном документе способов.
В некоторых вариантах осуществления программируемое логическое устройство (например, программируемая пользователем вентильная матрица) может использоваться для выполнения некоторых или всех функций описанных в данном документе способов. В некоторых вариантах осуществления изобретения программируемая пользователем вентильная матрица может взаимодействовать с микропроцессором для выполнения одного из описанных в данном документе способов. Как правило, способы предпочтительно выполняют любым аппаратным устройством.
Описанные выше варианты осуществления приведены просто в качестве иллюстративных примеров принципов настоящего изобретения. Понятно, что модификации и изменения описанных в данном документе устройств и подробностей являются очевидными для специалистов в данной области техники. Следовательно, подразумевают, что настоящее изобретение ограничено только лишь объемом приведенной ниже формулы изобретения, а не конкретными подробностями, представленными здесь посредством описания и объяснения вариантов осуществления изобретения.
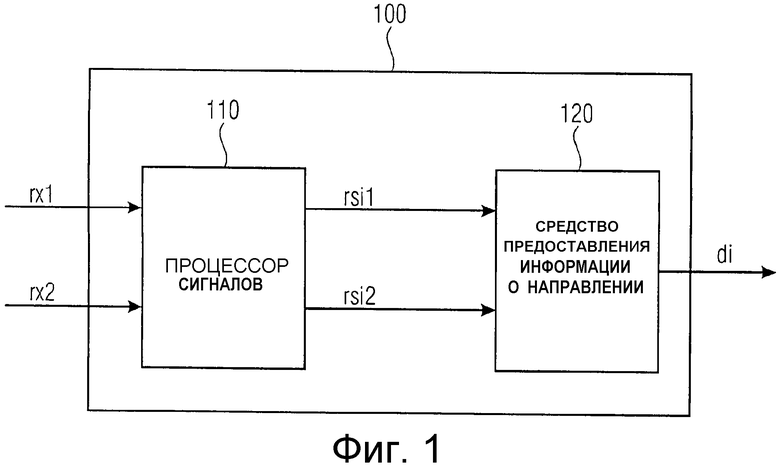
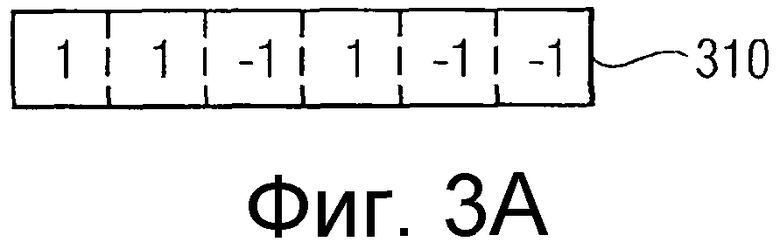
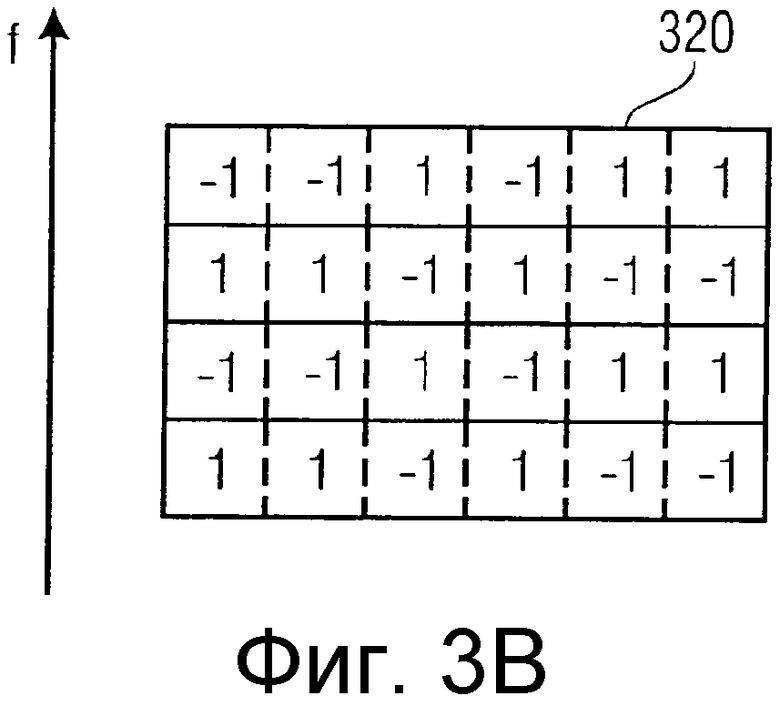
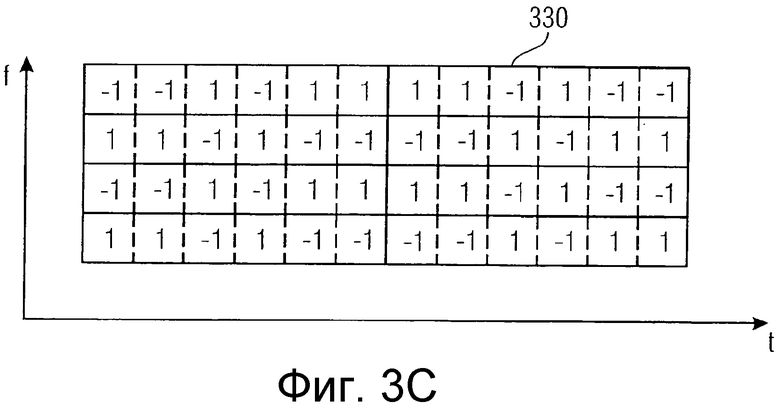
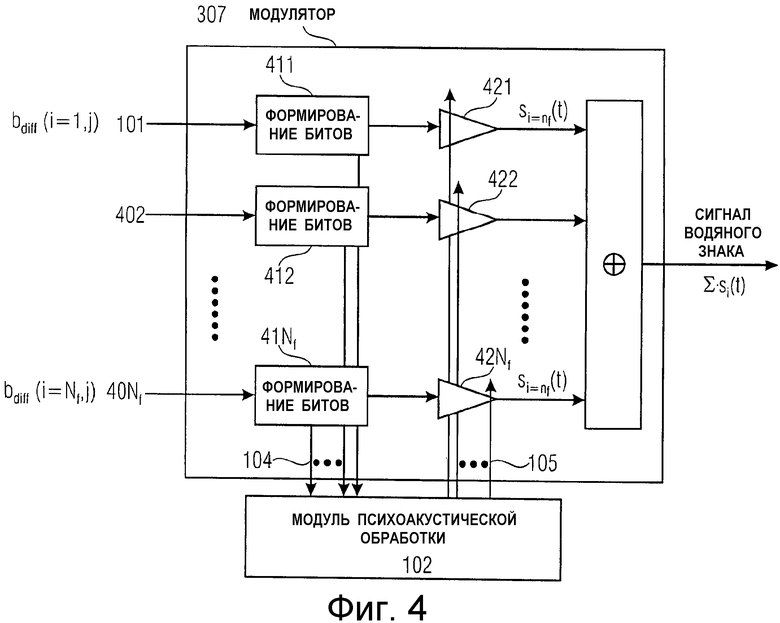
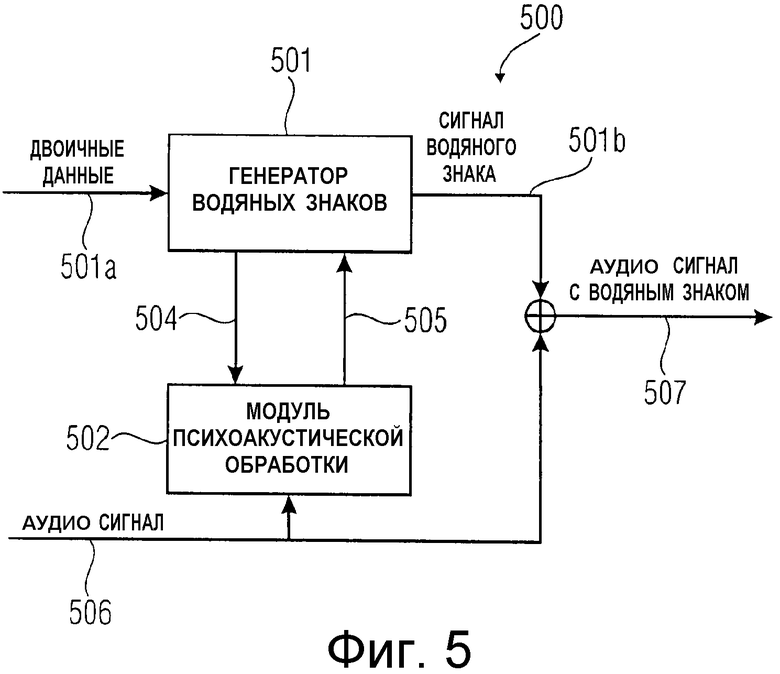
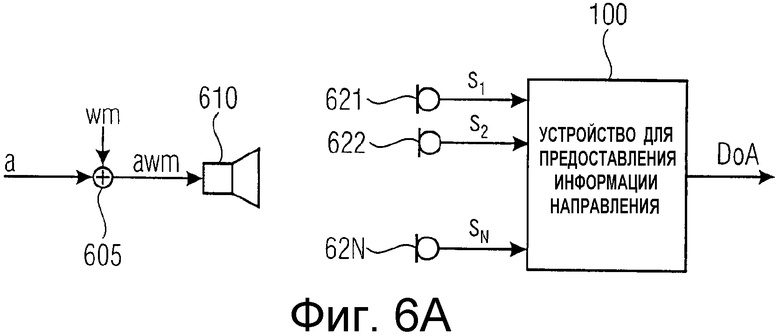
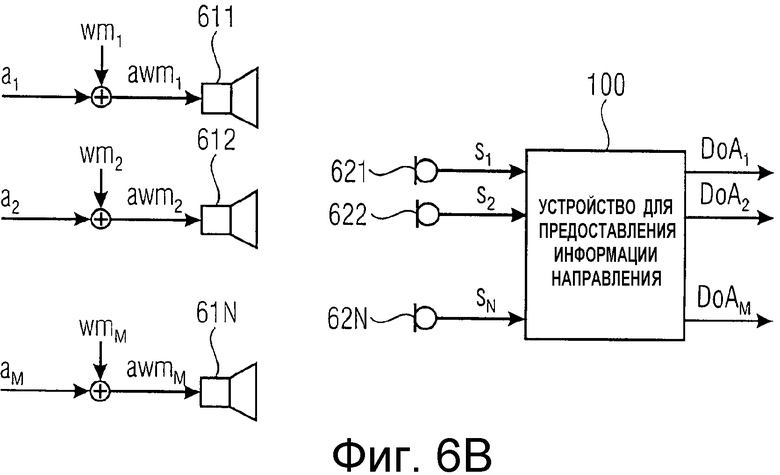
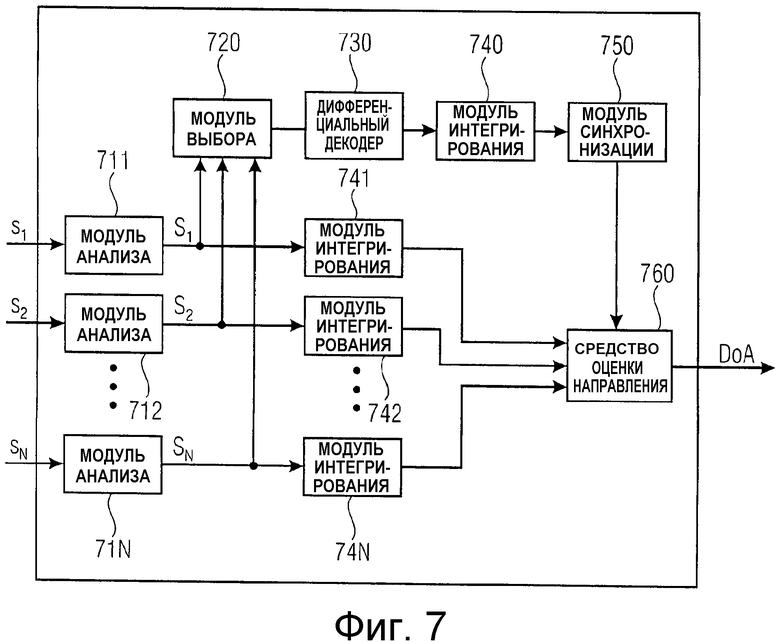
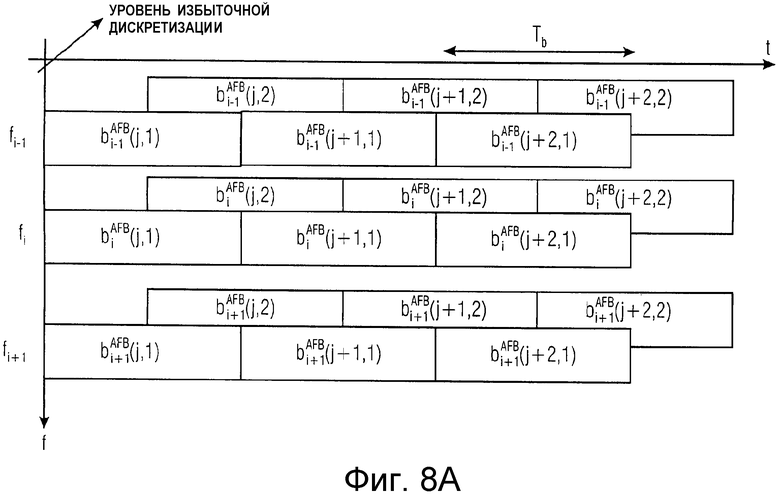
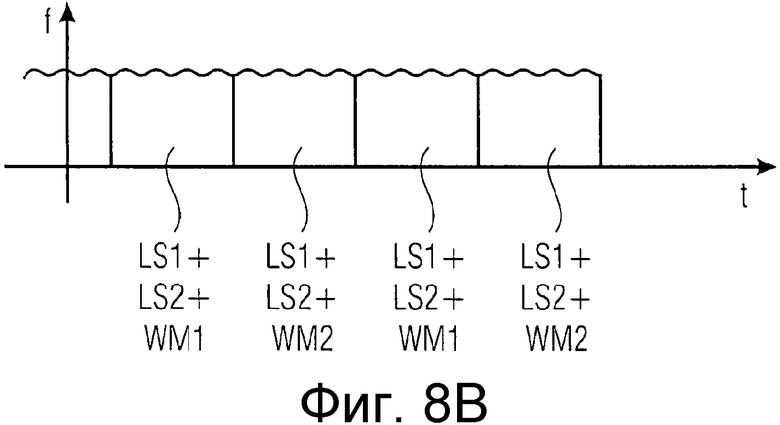
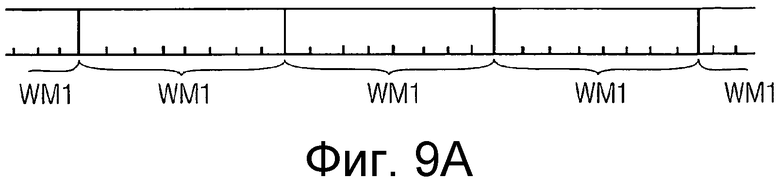
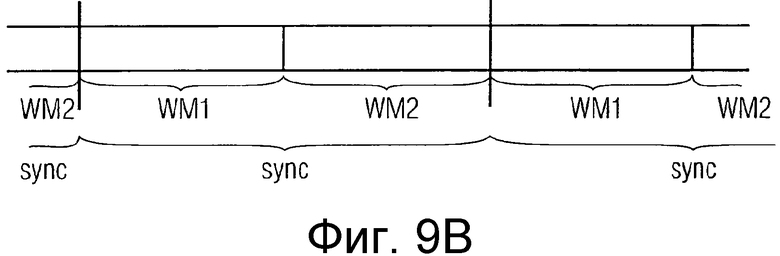
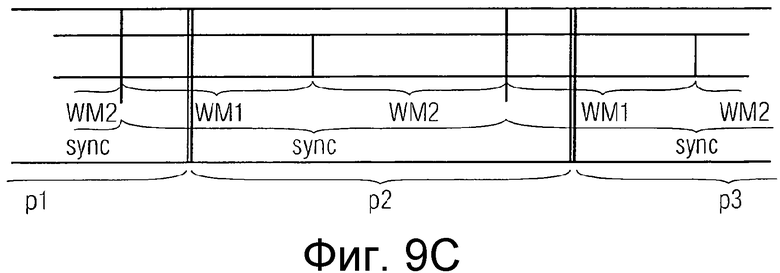
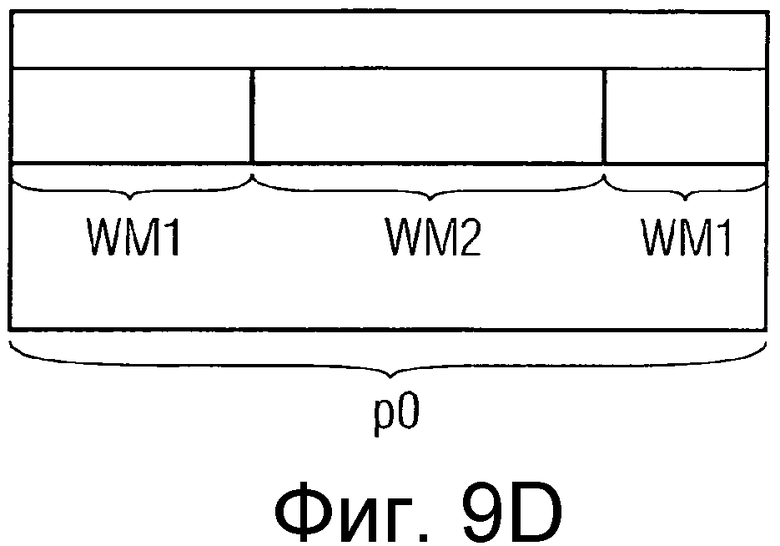
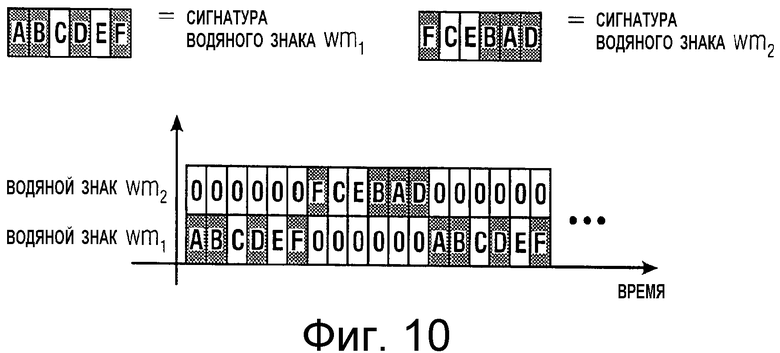
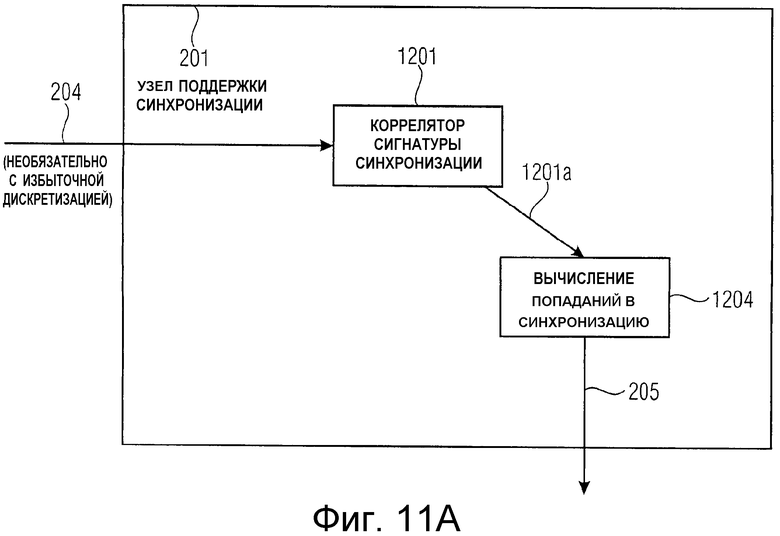
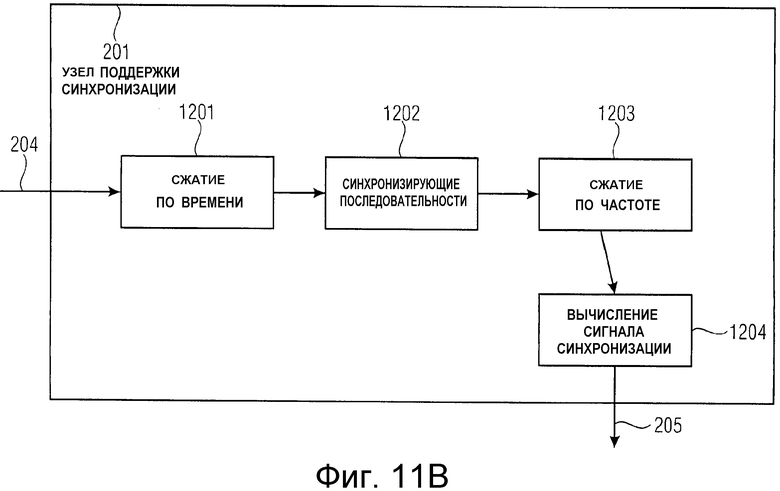
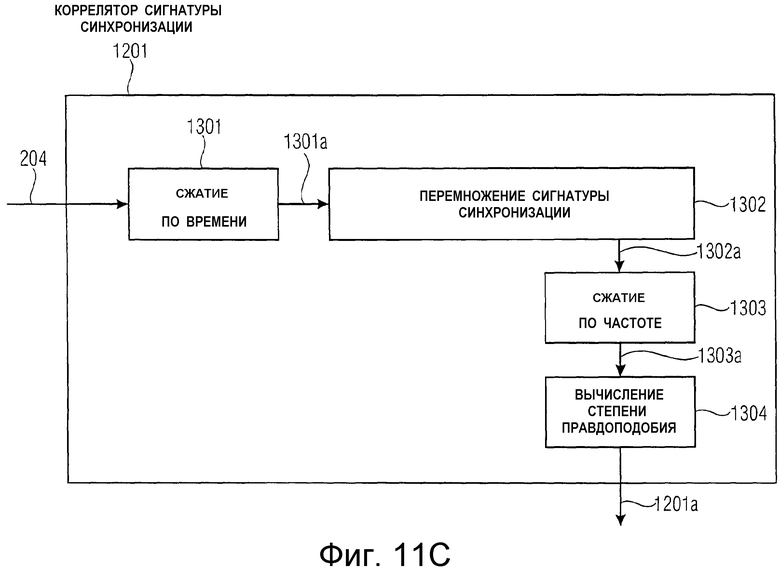
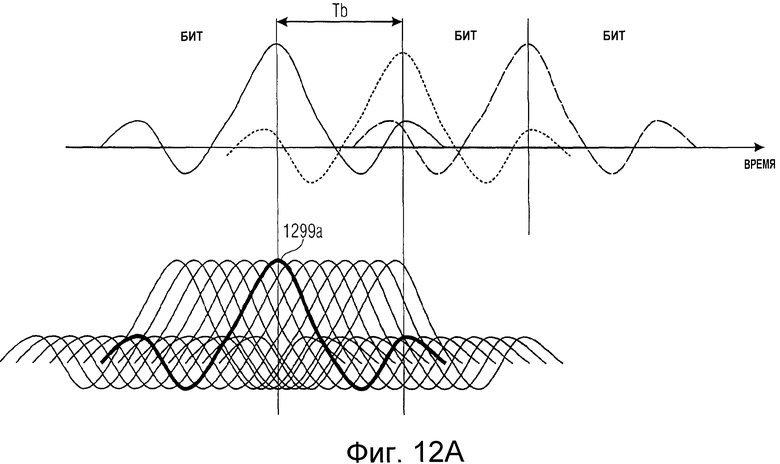
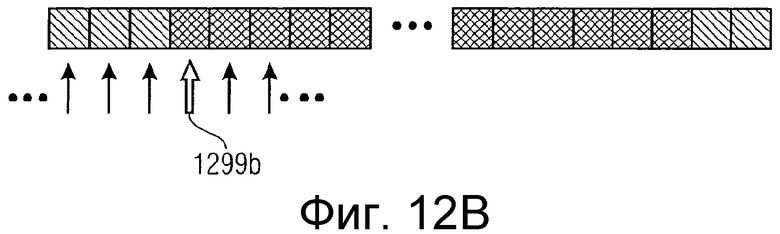
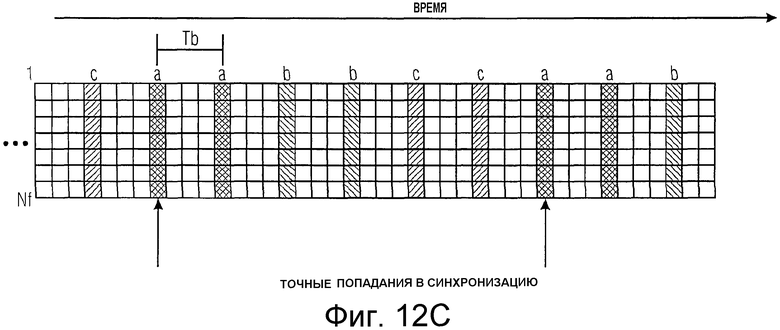
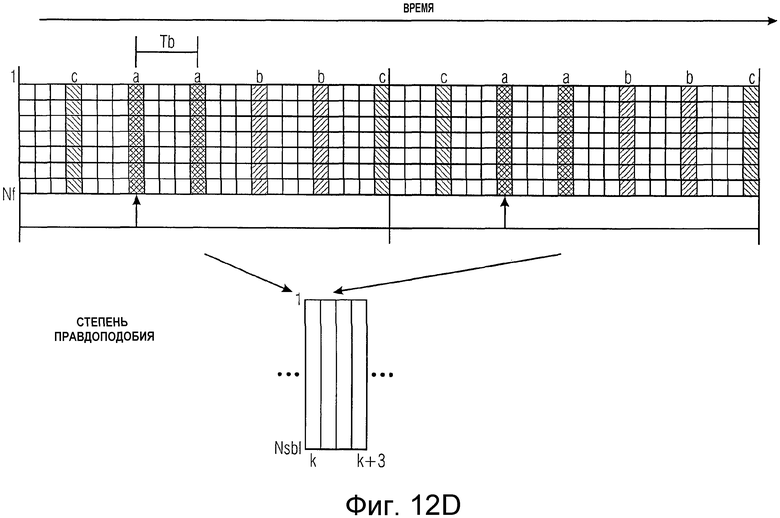
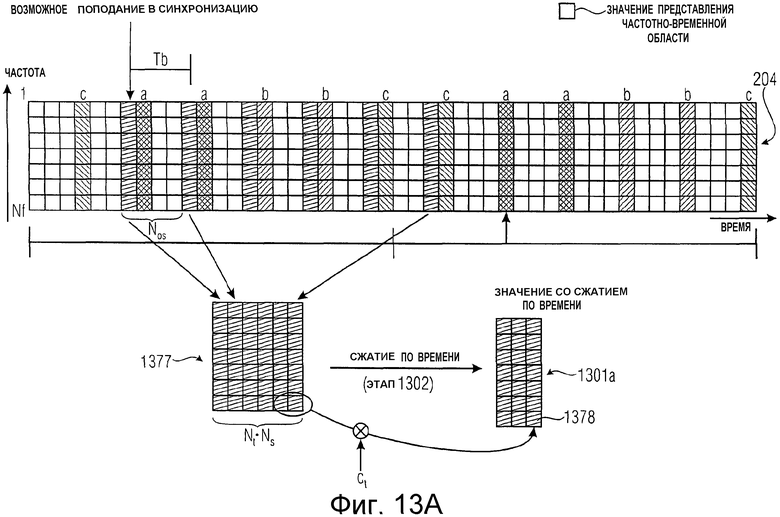
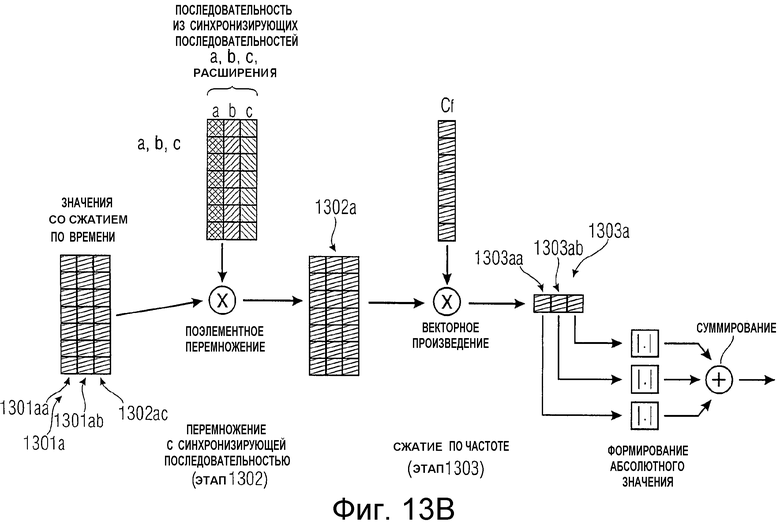
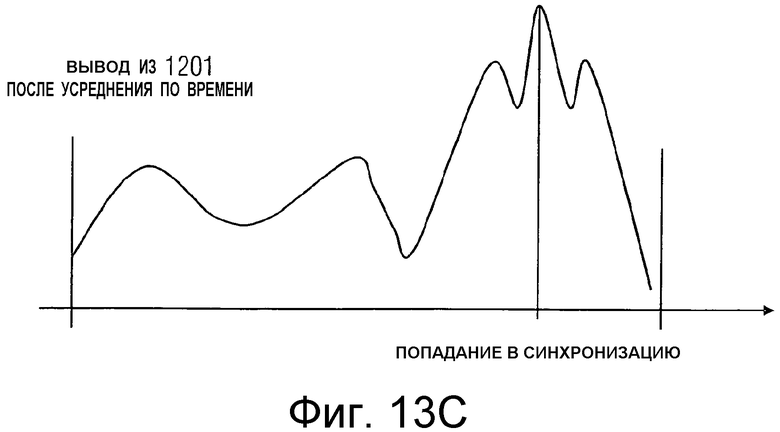
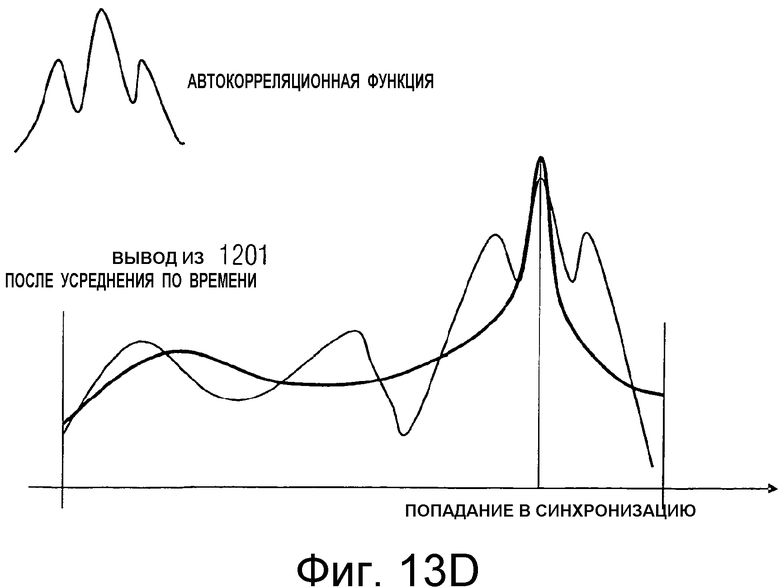
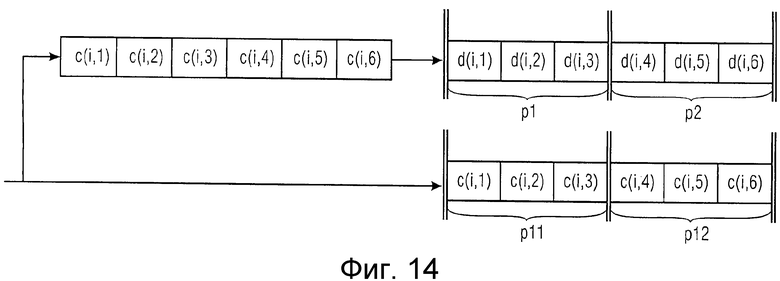
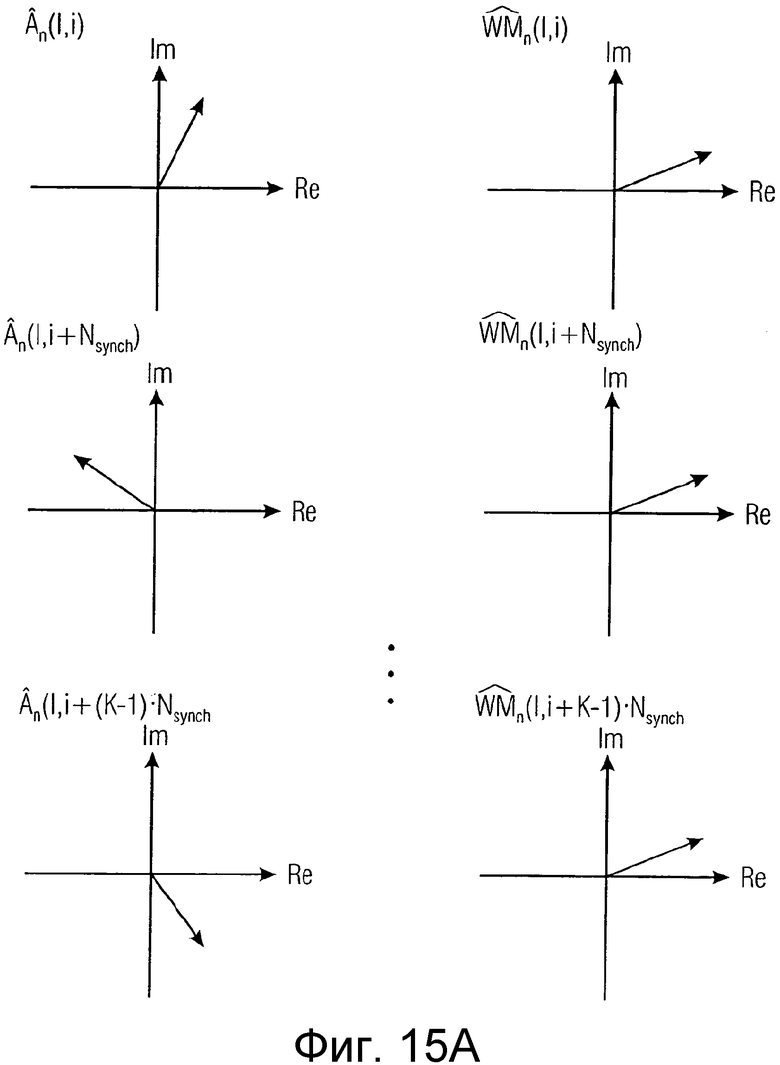
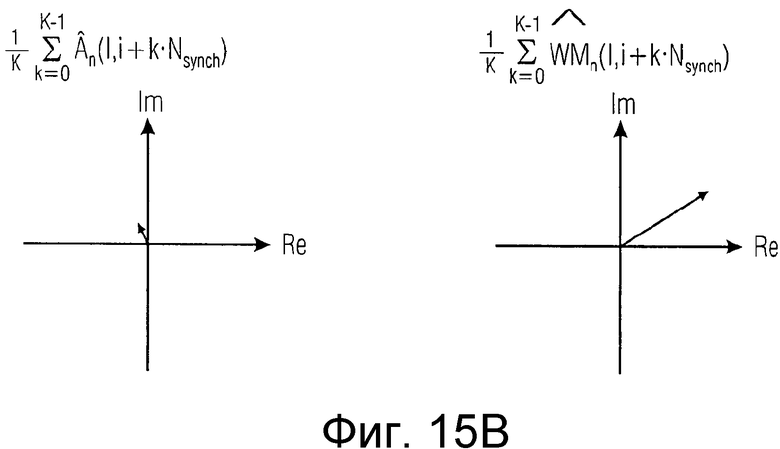
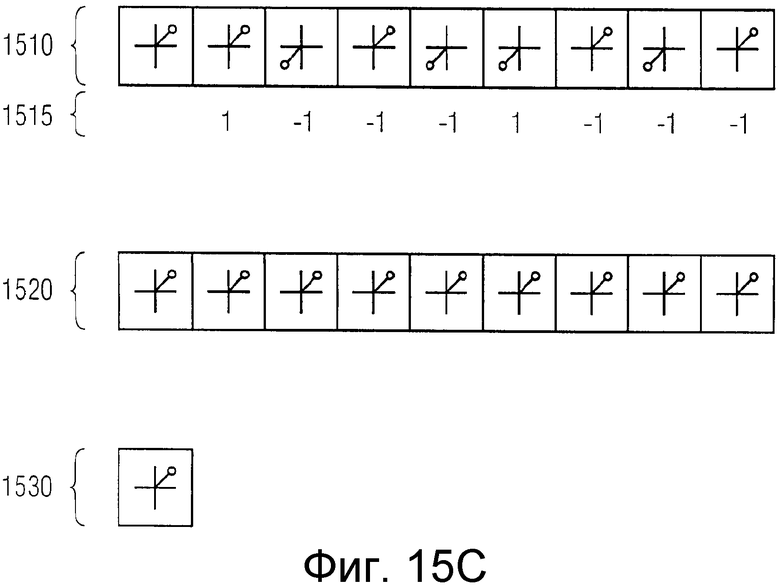
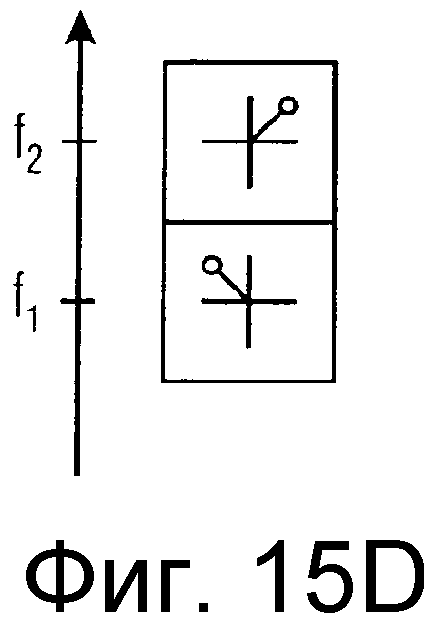
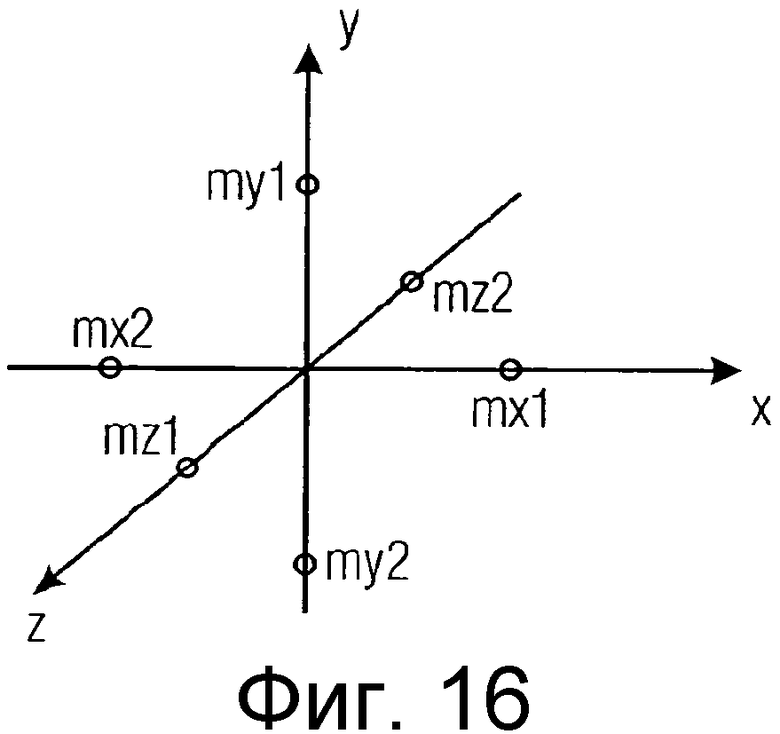
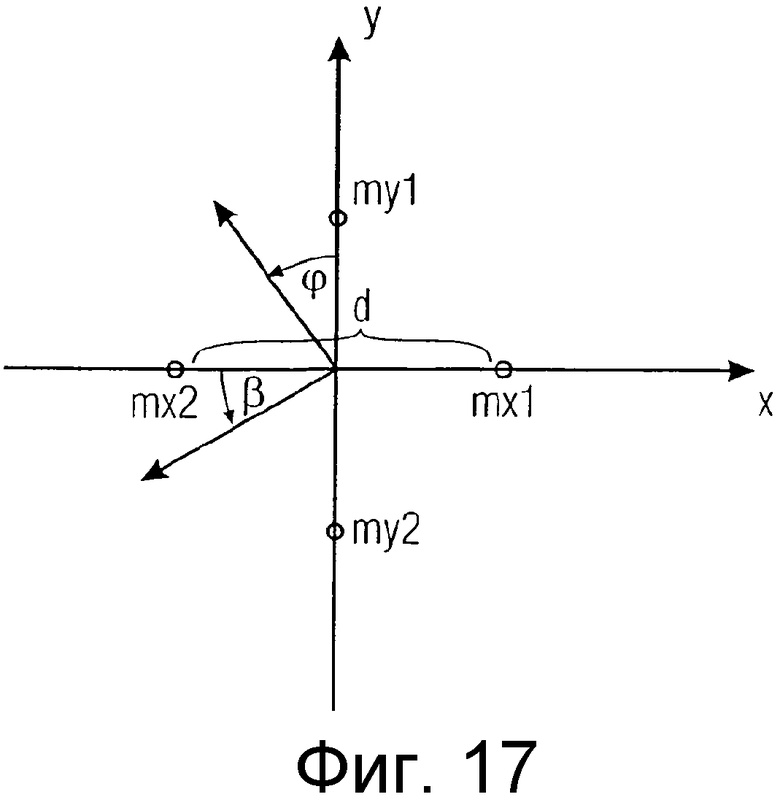
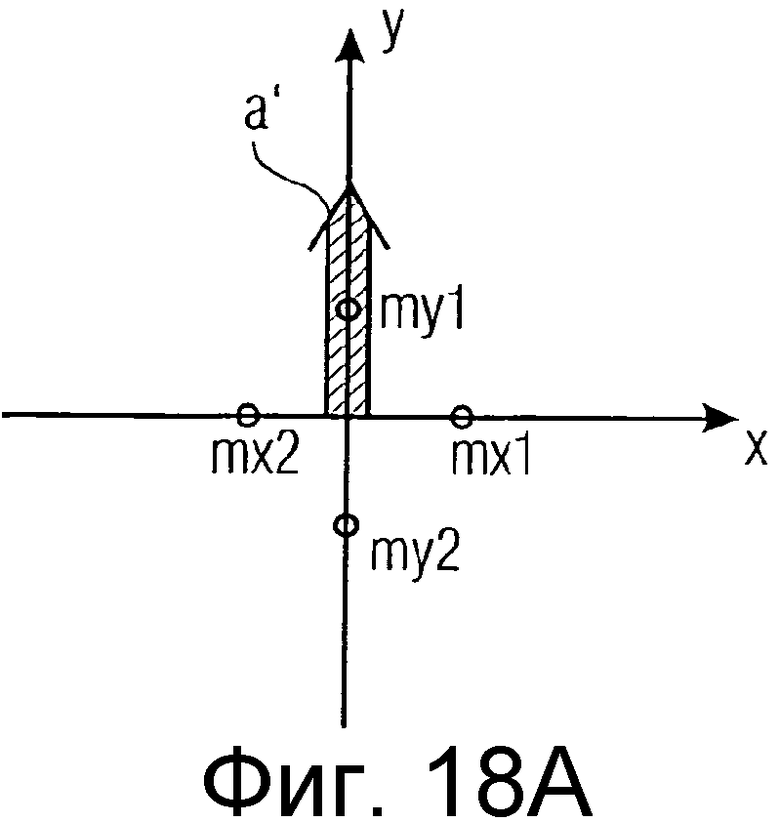
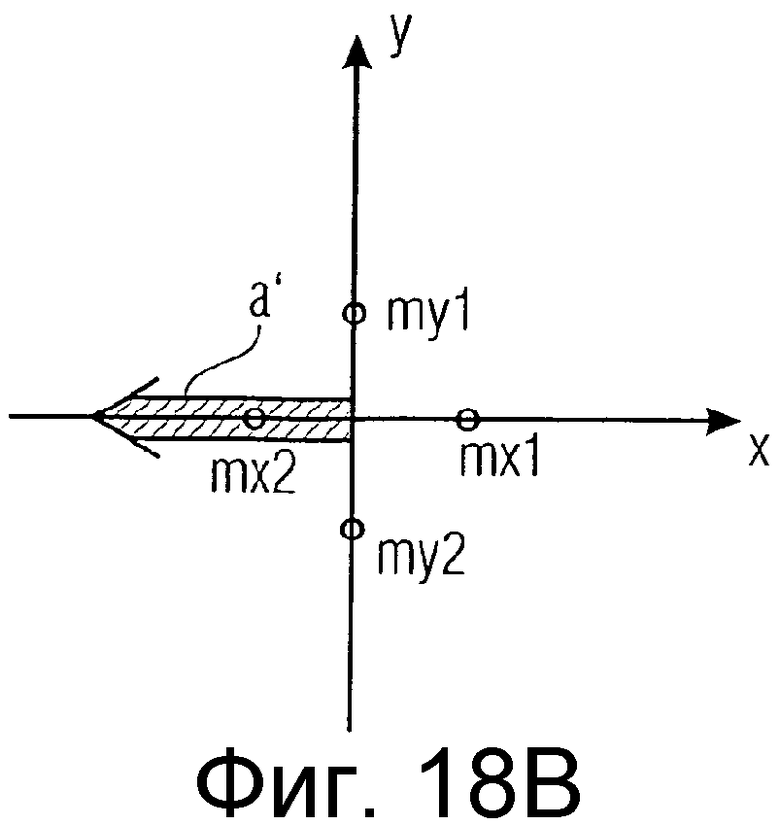
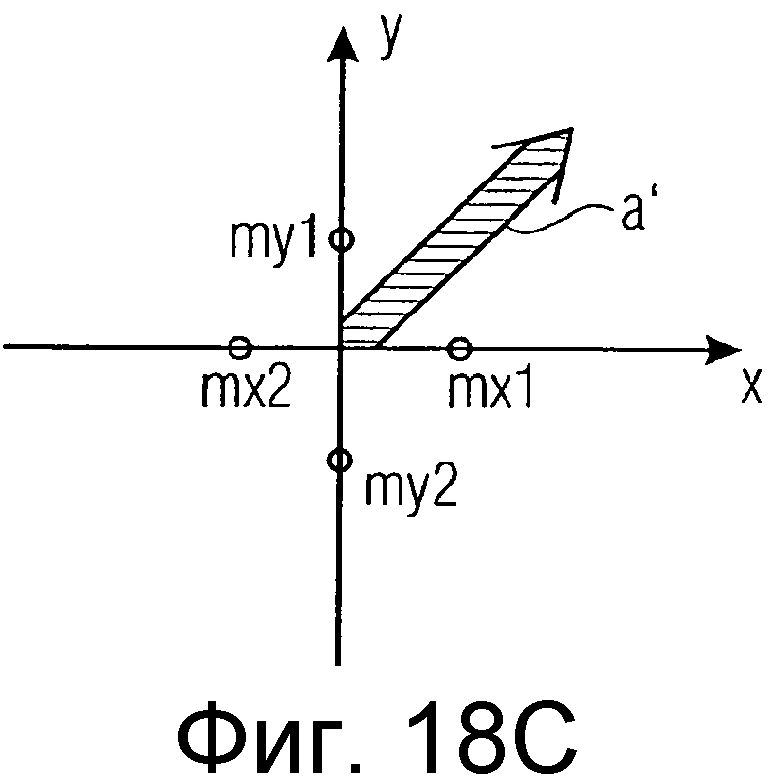
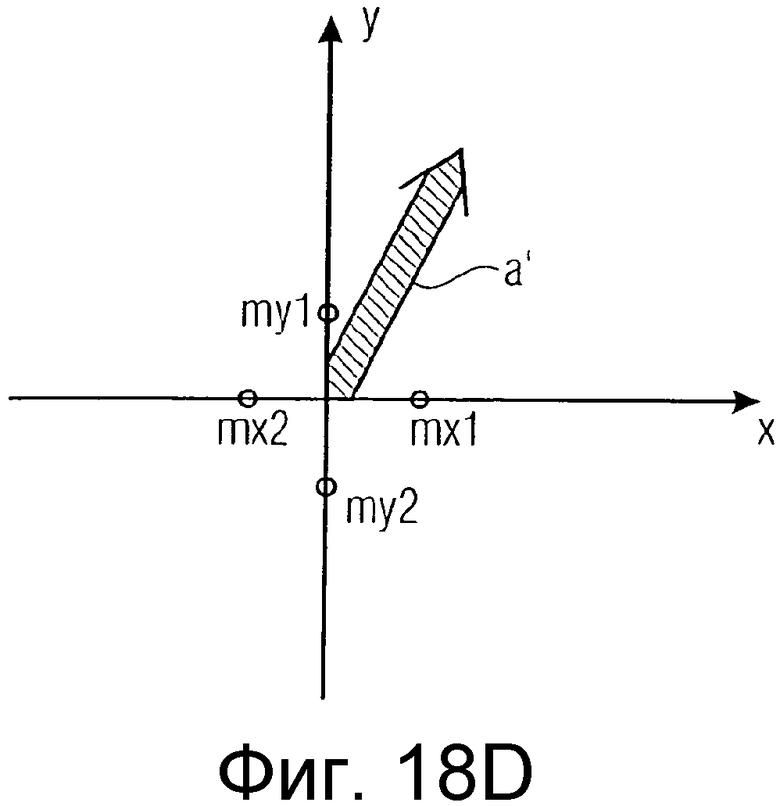
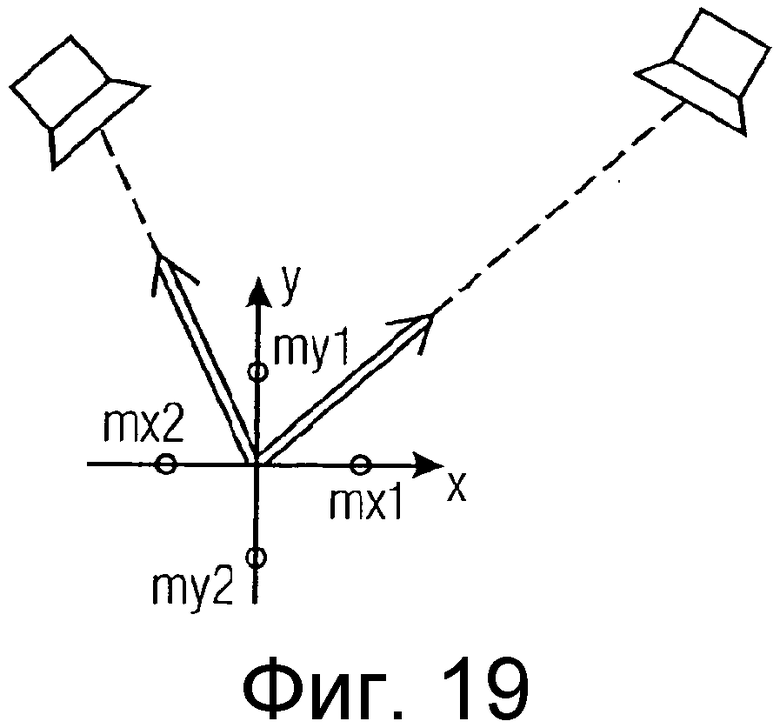
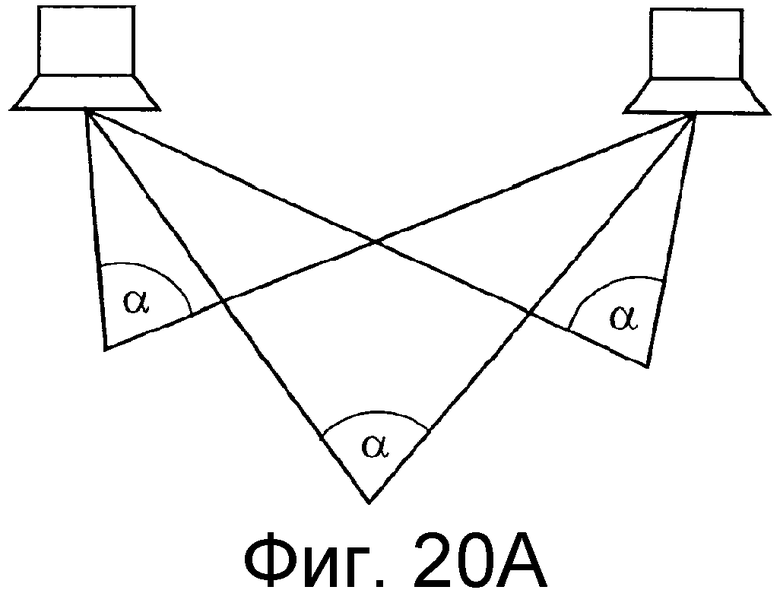
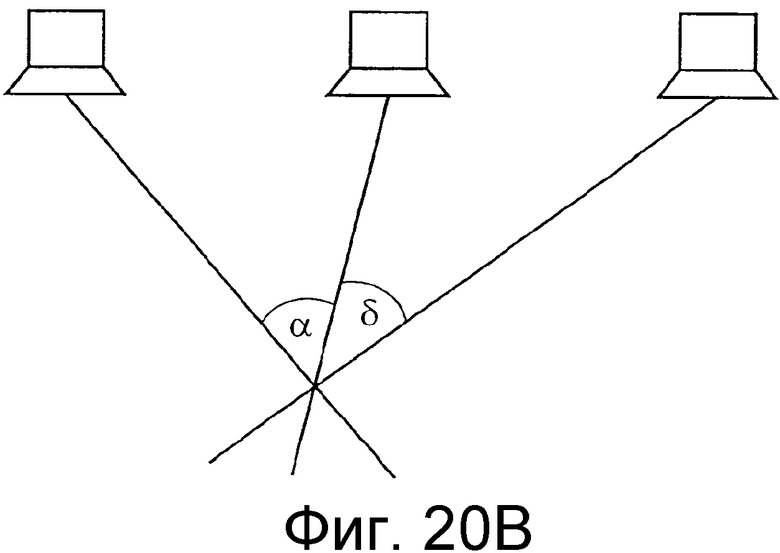
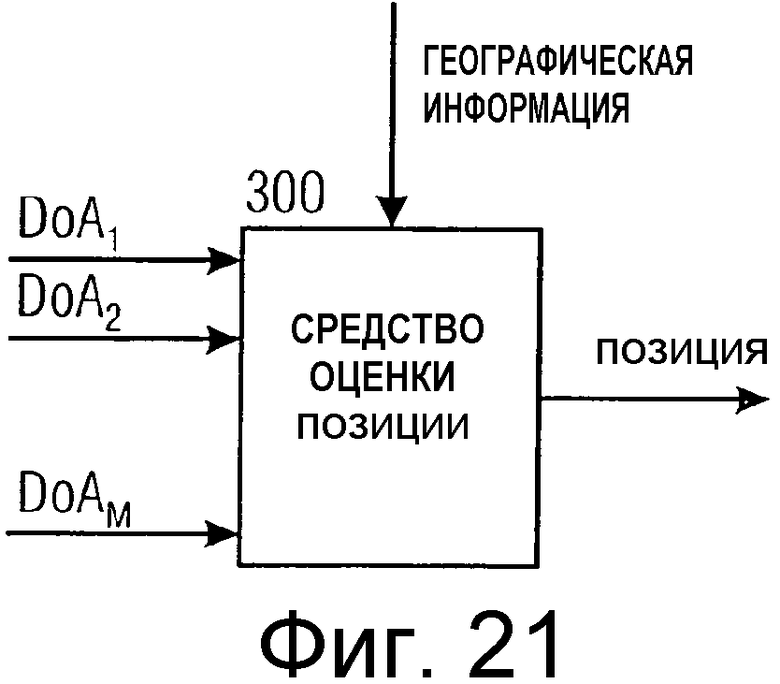
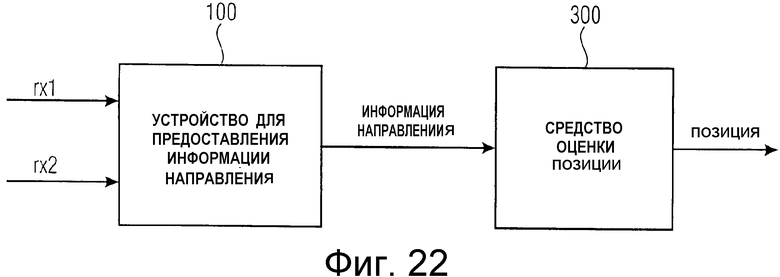
Изобретение относится к определению направления прихода сигнала от источника звука. Предложены способ предоставления информации направления на основании воспроизведенного аудиосигнала с внедренным водяным знаком и устройство для его осуществления, способ оценки пространственной позиции и устройство для его осуществления, машиночитаемый носитель, содержащий компьютерную программу для выполнения способов. Способ предоставления информации направления и способ оценки пространственной позиции включают этапы, на которых: принимают аудиосигналы с водяными знаками, причем каждый записанный аудиосигнал с водяными знаками содержит внедренный водяной знак, обрабатывают, по меньшей мере, два записанных аудиосигнала с водяными знаками, записанных, по меньшей мере, двумя аудиоприемниками в различных пространственных позициях, для определения информации фазы в качестве специфичной для приемника информации для каждого записанного аудиосигнала с водяными знаками, при этом специфичная для приемника информация зависит от внедренных водяных знаков, внедренных в записанные аудиосигналы с водяными знаками, и предоставляют информацию направления на основании специфичной для приемника информации для каждого записанного аудиосигнала с водяными знаками, при этом способ оценки пространственной позиции дополнительно содержит этап оценки позиции массива из, по меньшей мере, двух аудиоприемников, при этом позицию определяют на основании информации направления. Техническим результатом является обеспечение более точного определения направления прихода сигнала передачи и более точной оценки пространственной позиции. 5 н. и 11 з.п. ф-лы, 22 ил.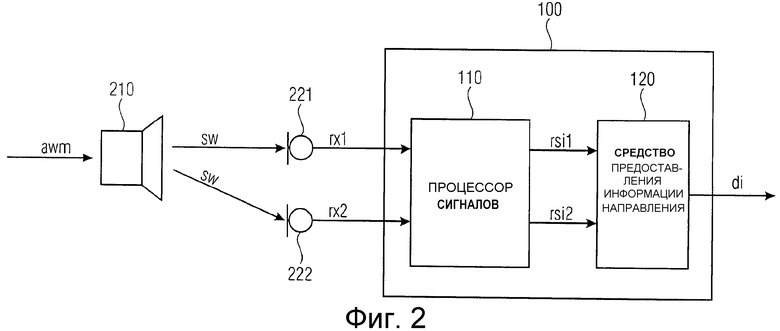
1. Устройство (100) для предоставления информации направления на основании воспроизведенного аудиосигнала (awm) с внедренным водяным знаком, содержащее:
процессор (110) сигналов, приспособленный для обработки, по меньшей мере, двух записанных аудиосигналов (rx1, rx2) с водяными знаками, записанных, по меньшей мере, двумя аудиоприемниками (221, 222) в различных пространственных позициях, при этом аудиоприемники (221, 222) приспособлены для записи звуковых волн воспроизведенного аудиосигнала (awm) для получения записанных аудиосигналов (rx1, rx2) с водяными знаками, причем каждый записанный аудиосигнал (rx1, rx2) с водяными знаками содержит внедренный водяной знак, при этом процессор (110) сигналов приспособлен для обработки записанных аудиосигналов (rx1, rx2) с водяными знаками для получения информации фазы в качестве специфичной для приемника информации для каждого записанного аудиосигнала (rx1, rx2) с водяными знаками, причем специфичная для приемника информация зависит от внедренных водяных знаков, внедренных в записанные аудиосигналы (rx1, rx2) с водяными знаками, и
средство (120) предоставления информации направления для предоставления информации направления на основании специфичной для приемника информации для каждого записанного аудиосигнала (rx1, rx2) с водяными знаками.
2. Устройство (100) по п. 1, в котором процессор (110) сигналов содержит модуль (711, 712, 71N) анализа для преобразования записанных аудиосигналов (rx1, rx2) с водяными знаками из временной области в частотно-временную область для получения сигнала передачи частотно-временной области, содержащего множество сигналов поддиапазона.
3. Устройство (100) по п. 1, в котором процессор (110) сигналов приспособлен для определения комплексного числа в качестве специфичной для приемника информации.
4. Устройство (100) по п. 1, в котором процессор (110) сигналов приспособлен для определения усредненного значения фазы в качестве информации фазы на основании определенного усредненного комплексного коэффициента.
5. Устройство (100) по п. 4, в котором процессор (110) сигналов приспособлен для генерации усредненного комплексного коэффициента посредством определения усредненного периодического блока, содержащего обработанные комплексные коэффициенты сигнала поддиапазона.
6. Устройство (100) по п. 2, в котором процессор (110) сигналов приспособлен для определения информации фазы в качестве специфичной для приемника информации, при этом процессор (110) сигналов приспособлен для определения усредненного значения фазы в качестве информации фазы, на основании определенного усредненного комплексного коэффициента, и при этом процессор (110) сигналов приспособлен для генерации усредненного комплексного коэффициента посредством определения усредненного периодического блока, содержащего обработанные комплексные коэффициенты одного из множества сигналов поддиапазона.
7. Устройство (100) по п. 5, в котором процессор (110) сигналов приспособлен для определения усредненного комплексного коэффициента посредством объединения, по меньшей мере, двух из обработанных комплексных коэффициентов сигналов поддиапазона, при этом обработанные комплексные коэффициенты имеют равные значения фазы или значения фазы, которые отличаются не более чем на 0,5 радиана.
8. Устройство (100) по п. 5, в котором процессор (110) сигналов приспособлен для генерации обработанных комплексных коэффициентов посредством изменения значения фазы, по меньшей мере, одного из комплексных коэффициентов на предопределенное число.
9. Устройство (100) по п. 1, в котором процессор (110) сигналов приспособлен для определения позиции попадания в синхронизацию, которая указывает позицию комплексного коэффициента, кодирующего первый бит сигнатуры водяного знака.
10. Устройство (100) по п. 5, в котором процессор (110) сигналов приспособлен для определения позиции попадания в синхронизацию, которая указывает позицию, по меньшей мере, одного из обработанных комплексных коэффициентов, кодирующего первый бит сигнатуры водяного знака из внедренного водяного знака, внедренного в записанные аудиосигналы (rx1, rx2) с водяными знаками.
11. Устройство (100) по п. 1, в котором средство (120) предоставления информации направления приспособлено для использования комплексного числа для определения и предоставления информации направления.
12. Устройство (100) по п. 1, в котором средство (120) предоставления информации направления приспособлено для предоставления вектора направления прихода в качестве информации направления.
13. Устройство для оценки пространственной позиции, содержащее:
устройство (100) для предоставления информации направления по п. 1, и
средство (300) оценки позиции для оценки позиции устройства для оценки пространственной позиции, при этом средство (300) оценки позиции приспособлено для оценки позиции устройства для оценки пространственной позиции на основании информации направления, предоставленной устройством для предоставления информации направления.
14. Способ предоставления информации направления, состоящий в том, что:
принимают аудиосигналы с водяными знаками, причем каждый записанный аудиосигнал (rx1, rx2) с водяными знаками содержит внедренный водяной знак,
обрабатывают, по меньшей мере, два записанных аудиосигнала (rx1, rx2) с водяными знаками, записанных, по меньшей мере, двумя аудиоприемниками в различных пространственных позициях, для определения информации фазы в качестве специфичной для приемника информации для каждого записанного аудиосигнала (rx1, rx2) с водяными знаками, при этом специфичная для приемника информация зависит от внедренных водяных знаков, внедренных в записанные аудиосигналы (rx1, rx2) с водяными знаками, и
предоставляют информацию направления на основании специфичной для приемника информации для каждого записанного аудиосигнала (rx1, rx2) с водяными знаками.
15. Способ оценки пространственной позиции по п. 14,
в котором этап приема аудиосигналов с водяными знаками выполняют посредством использования массива из, по меньшей мере, двух аудиоприемников, причем каждый записанный аудиосигнал (rx1, rx2) с водяными знаками содержит внедренный водяной знак, и
при этом способ дополнительно содержит этап оценки позиции массива из упомянутых, по меньшей мере, двух аудиоприемников, при этом позицию определяют на основании информации направления.
16. Машиночитаемый носитель, содержащий компьютерную программу для выполнения способа по п. 14 или 15, при исполнении этой компьютерной программы компьютером или процессором.
| US 2008247274 A1, 09.10.2008 | |||
| US 7529941 B1, 05.05.2009 | |||
| US 2006156002 A1, 13.07.2006 | |||
| ВНЕДРЕНИЕ ВОДЯНОГО ЗНАКА | 2005 |
|
RU2376708C2 |

