Область техники, к которой относится изобретение
[0001] Данное изобретение относится к системе управления зарядом аккумулятора и способу управления зарядом аккумулятора автоматически управляемого транспортного средства, которое движется без водителя посредством использования электрической энергии смонтированного аккумулятора в качестве источника приведения в движение и заряжает смонтированный аккумулятор в зарядной станции.
Уровень техники
[0002] В автоматически управляемом транспортном средстве, поясненном в JP 2-49341U, свинцовый аккумулятор монтируется в качестве аккумулятора автоматически управляемого транспортного средства. Этот аккумулятор автоматически управляемого транспортного средства периодически заменяется новым аккумулятором, который полностью заряжен. Альтернативно, с использованием зарядного устройства аккумулятора зарядной станции, смонтированный аккумулятор автоматически заряжается до полного уровня заряда.
[0003] В автоматически управляемом транспортном средстве, поясненном в JP 2007-74800A, никель-водородный аккумулятор или литий-ионный аккумулятор, который может быть использован как в операции частичного заряда, так и в операции полного заряда, монтируется в качестве аккумулятора. В этом автоматически управляемом транспортном средстве состояние заряда управляется таким образом, что операция заряда начинается, когда оставшаяся емкость аккумулятора достигает емкости для начала заряда, и операция заряда прекращается, когда оставшаяся емкость достигает емкости для прекращения заряда.
[0004] Помимо этого, в автоматически управляемом транспортном средстве, поясненном в JP 3-27732A, аккумуляторы, имеющие различные емкости и напряжения, монтируются в соответствующих автоматически управляемых транспортных средствах. Кроме того, устанавливается идентификационная (ID) метка, соответствующая типу аккумулятора. В зарядной станции тип смонтированного аккумулятора определяется в зависимости от идентификационной метки, и аккумулятор заряжается, чтобы удовлетворять надлежащему состоянию заряда, такому как зарядное напряжение или зарядный ток.
Сущность изобретения
[0005] Тем не менее, авторы изобретения изучали возможность того, задействовано ли автоматически управляемое транспортное средство с литий-ионным аккумулятором, поясненное в JP 2007-74800A, в процессе транспортировки автоматически управляемого транспортного средства, имеющего свинцовый аккумулятор, поясненный в JP 2-49341U. Зарядная станция, используемая в процессе транспортировки автоматически управляемого транспортного средства, для свинцового аккумулятора, уже устанавливается с автоматическим зарядным устройством аккумулятора для свинцового аккумулятора. Это автоматическое зарядное устройство аккумулятора содержит модуль питания, который может подавать зарядное напряжение максимум до 28 В для заряда свинцового аккумулятора. По этой причине, как пояснено в JP 2007-74800A, чтобы задействовать автоматически управляемое транспортное средство, имеющее литий-ионный аккумулятор вместо свинцового аккумулятора в качестве аккумулятора, в процессе транспортировки, необходимо полностью заменять автоматическое зарядное устройство аккумулятора, предоставленное в зарядной станции, на автоматическое зарядное устройство аккумулятора, имеющее модуль питания, имеющий максимальное зарядное напряжение, отрегулированное для литий-ионного аккумулятора. Это требует высоких затрат.
[0006] Следовательно, в качестве переходного способа, следует понимать, что автоматически управляемое транспортное средство, имеющее свинцовый аккумулятор, и автоматически управляемое транспортное средство, имеющее литий-ионный аккумулятор, используются комбинированным способом. В этом случае, как пояснено в JP 3-27732A, также следует понимать, что автоматически управляемое транспортное средство содержит идентификационную (ID) метку, соответствующую смонтированному аккумулятору, тип аккумулятора определяется на основе идентификационной метки, и зарядное напряжение изменяется в зависимости от типа аккумулятора, так что операция заряда может выполняться в зависимости от типа аккумулятора. Тем не менее, (1) вследствие идентификационной метки, аккумулятор и зарядное устройство аккумулятора требуют высоких затрат. (2) Если идентификационная метка отличается, когда аккумулятор заменяется, аккумулятор может быть избыточно заряжен. (3) Поскольку управление переключением напряжения предоставляется в автоматическом зарядном устройстве аккумулятора, это требует высоких затрат.
[0007] Это изобретение осуществлено с учетом проблем предшествующего уровня техники, описанных выше. Это изобретение предоставляет систему управления зарядом аккумулятора и способ управления зарядом аккумулятора автоматически управляемого транспортного средства, подходящие для заряда автоматически управляемого транспортного средства, в котором монтируются различные типы аккумуляторов.
[0008] Согласно аспекту этого изобретения, предусмотрена система управления зарядом аккумулятора автоматически управляемого транспортного средства, которое движется без водителя посредством использования смонтированного аккумулятора в качестве источника питания и заряжает смонтированный аккумулятор в зарядной станции, при этом контроллер заряда аккумулятора, который отслеживает оставшуюся емкость смонтированного аккумулятора, монтируется в автоматически управляемом транспортном средстве. Помимо этого, контроллер заряда аккумулятора начинает операцию заряда для смонтированного аккумулятора в зарядной станции, когда оставшаяся емкость аккумулятора ниже предварительно определенного значения. Контроллер заряда аккумулятора прерывает тракт заряда транспортного средства, когда величина заряда смонтированного аккумулятора в ходе операции заряда достигает предварительно определенной емкости.
Краткое описание чертежей
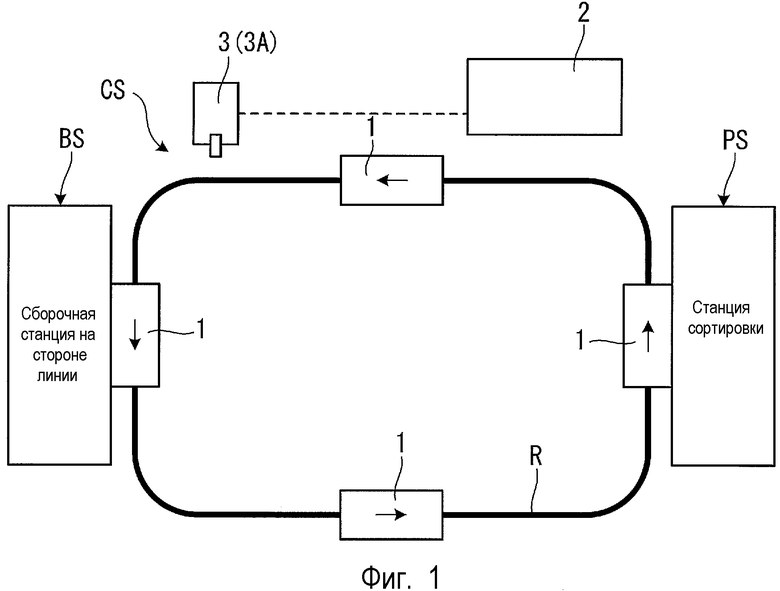
[0009] Фиг. 1 является концептуальной схемой, иллюстрирующей примерный маршрут движения автоматически управляемого транспортного средства согласно первому варианту осуществления.
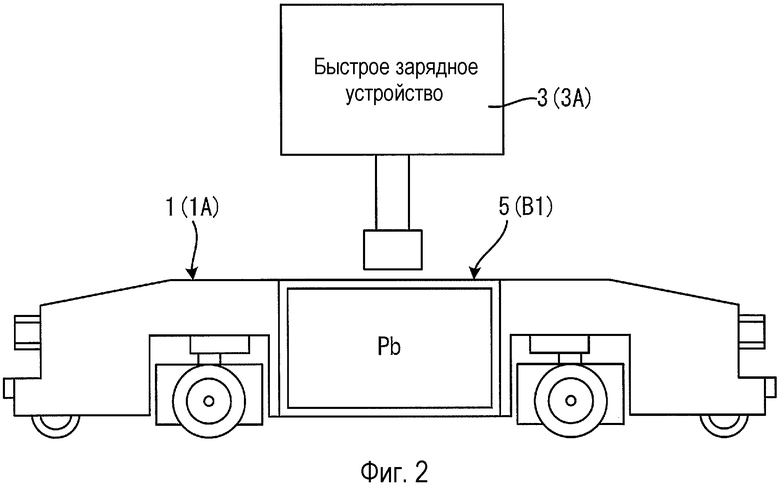
Фиг. 2 является пояснительной схемой, схематично иллюстрирующей автоматически управляемое транспортное средство, имеющее свинцовый аккумулятор в качестве аккумулятора, и автоматическое зарядное устройство аккумулятора зарядной станции.
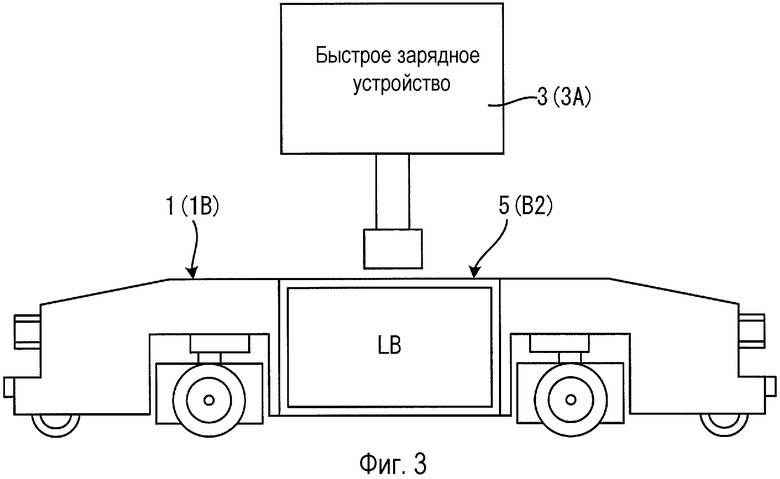
Фиг. 3 является пояснительной схемой, схематично иллюстрирующей автоматически управляемое транспортное средство, имеющее литий-ионную аккумуляторную батарею в качестве аккумулятора, и автоматическое зарядное устройство аккумулятора зарядной станции.
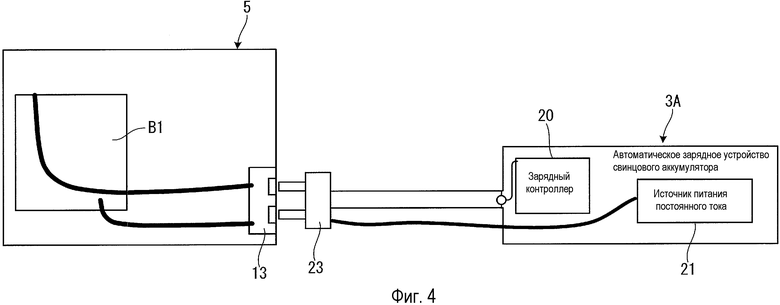
Фиг. 4 является пояснительной схемой, иллюстрирующей взаимосвязь между аккумуляторным блоком, имеющим свинцовый аккумулятор автоматически управляемого транспортного средства, и зарядным устройством аккумулятора зарядной станции в ходе операции заряда.
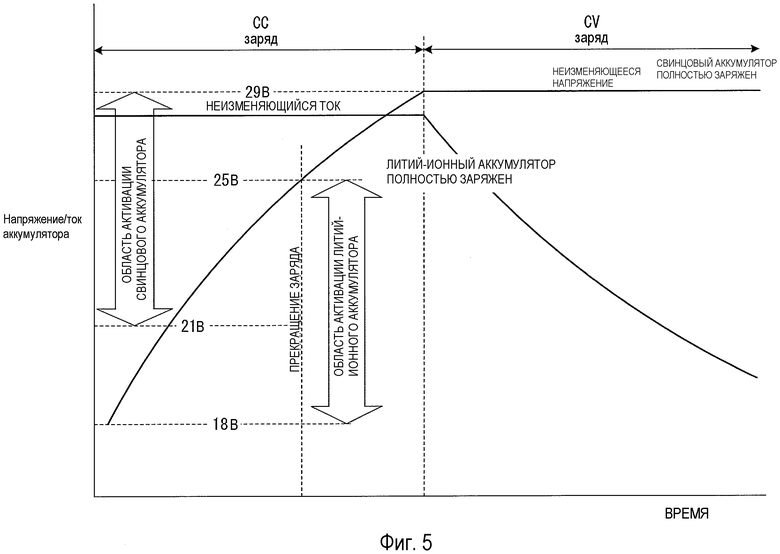
Фиг. 5 является характеристической схемой заряда аккумулятора, иллюстрирующей изменение напряжения аккумулятора и изменение подаваемого зарядного тока в ходе операции заряда.
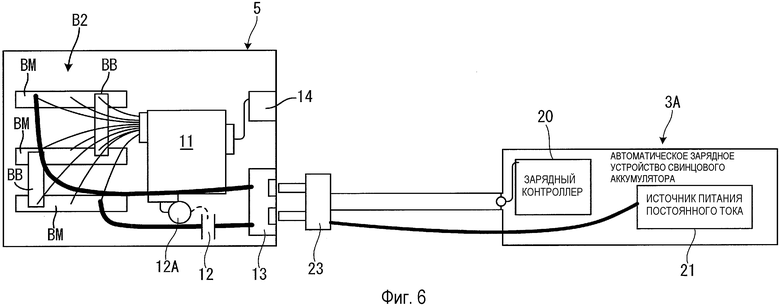
Фиг. 6 является пояснительной схемой, иллюстрирующей взаимосвязь между аккумуляторным блоком, имеющим литий-ионную аккумуляторную батарею автоматически управляемого транспортного средства, и зарядным устройством аккумулятора зарядной станции в ходе операции заряда.
Фиг. 7 является пояснительной схемой, иллюстрирующей изменение напряжения литий-ионного аккумулятора.
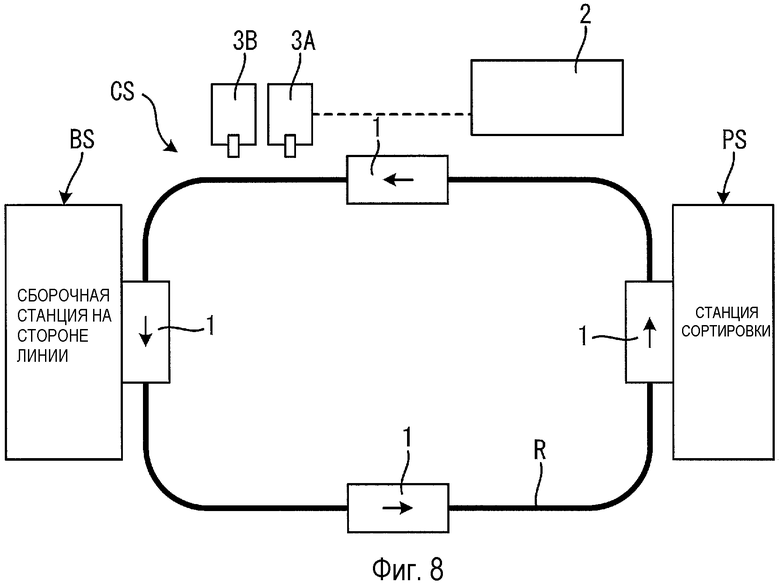
Фиг. 8 является концептуальной схемой, иллюстрирующей маршрут движения автоматически управляемого транспортного средства согласно второму варианту осуществления этого изобретения.
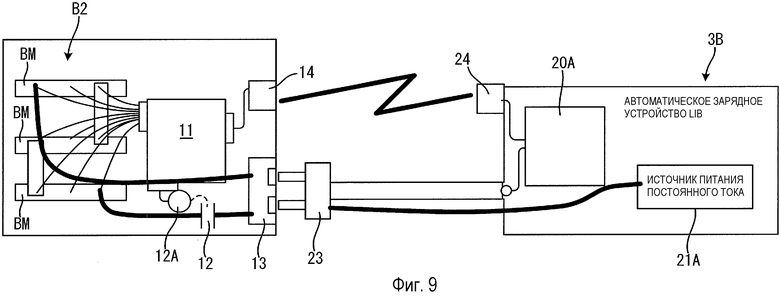
Фиг. 9 является пояснительной схемой, иллюстрирующей взаимосвязь между аккумуляторным блоком, имеющим литий-ионную аккумуляторную батарею автоматически управляемого транспортного средства, и зарядным устройством аккумулятора зарядной станции в ходе операции заряда согласно второму варианту осуществления.
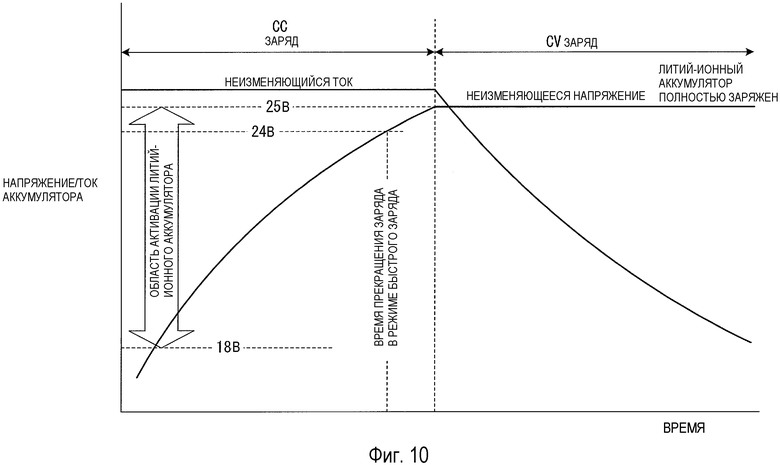
Фиг. 10 является характеристической схемой заряда аккумулятора, иллюстрирующей изменение напряжения аккумулятора и изменение подаваемого зарядного тока в ходе операции заряда согласно второму варианту осуществления.
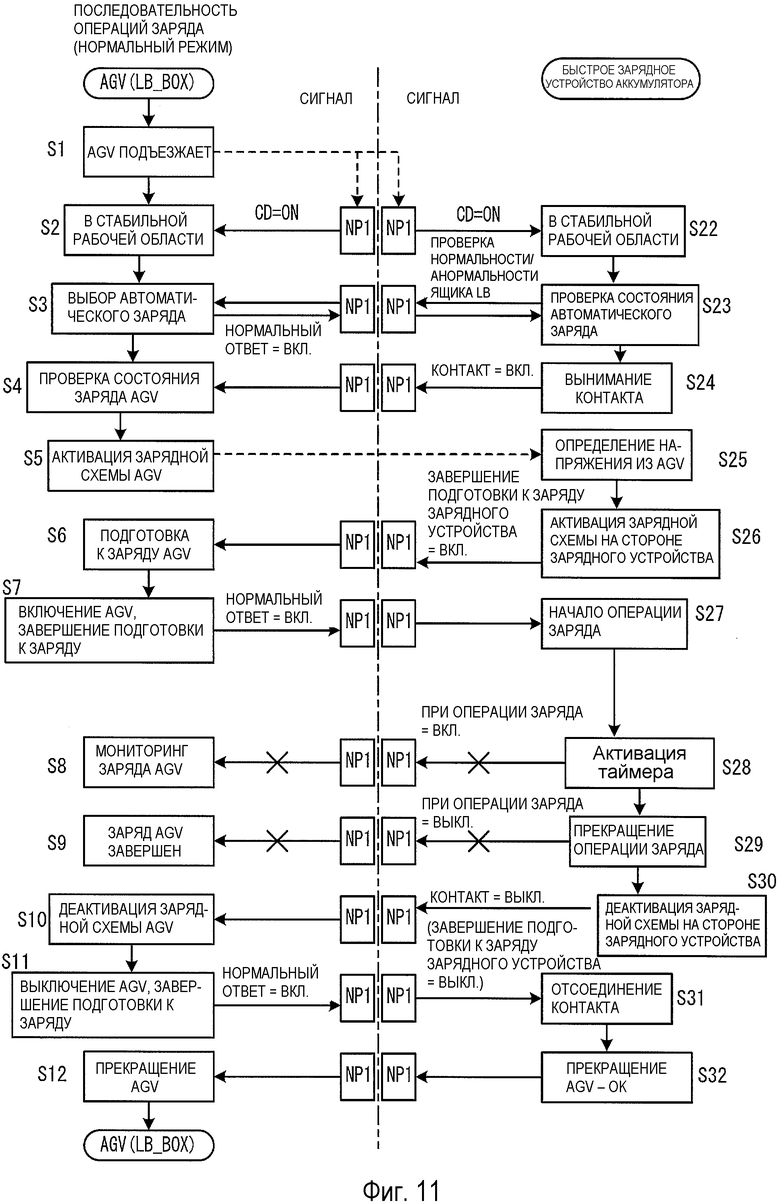
Фиг. 11 является блок-схемой последовательности операций способа, иллюстрирующей операции автоматически управляемого транспортного средства и модуля автоматического заряда аккумулятора в ходе операции заряда.
Подробное описание вариантов осуществления
[0010] Далее описываются варианты осуществления этого изобретения со ссылкой на прилагаемые чертежи.
[0011] Первый вариант осуществления
Маршрут движения автоматически управляемого транспортного средства во время процесса транспортировки представляет собой маршрут R движения по орбитальной дорожке, заданный с возможностью совершать перемещение по замкнутой траектории между станцией PS сортировки и сборочной станцией BS на стороне линии, например, как проиллюстрировано на фиг. 1. В процессе транспортировки множество автоматически управляемых транспортных средств 1 движется по маршруту R движения. Движение каждого автоматически управляемого транспортного средства 1 управляется посредством устройства 2 управления на стороне оборудования. На станции PS сортировки компоненты, необходимые на сборочной станции BS, загружаются в автоматически управляемое транспортное средство 1. Затем, автоматически управляемое транспортное средство 1 движется по маршруту R движения, чтобы транспортировать компоненты, загруженные на станции PS сортировки, на сборочную станцию BS, и загруженные компоненты разгружаются на сборочной станции BS. Помимо этого, автоматически управляемое транспортное средство 1 движется по маршруту R движения снова, чтобы возвращаться на станцию PS сортировки. Автоматически управляемое транспортное средство 1 повторяет это перемещение по замкнутой траектории.
[0012] Автоматически управляемое транспортное средство 1 содержит ящик 5 для аккумулятора для размещения аккумулятора B, состоящего из аккумуляторной батареи (к примеру, свинцового аккумулятора или литий-ионной аккумуляторной батареи), например, в центре транспортного средства, как проиллюстрировано на фиг. 2 и 3. Автоматически управляемое транспортное средство 1A по фиг. 2 имеет свинцовый аккумулятор в качестве аккумулятора B1. Автоматически управляемое транспортное средство 1B по фиг. 3 имеет литий-ионную аккумуляторную батарею в качестве аккумулятора B2. Автоматически управляемое транспортное средство 1 движется с использованием аккумулятора B в качестве источника энергии приведения в движение. По этой причине, когда зарядная емкость аккумулятора B снижается относительно предварительно определенного диапазона, и автоматически управляемое транспортное средство 1 паркуется в зарядной станции CS по маршруту R движения, аккумулятор B заряжается с использованием автоматического зарядного устройства 3 аккумулятора. Автоматическое зарядное устройство 3 аккумулятора снабжается энергией заряда из источника 21 питания постоянного тока.
[0013] В системе управления зарядом аккумулятора автоматически управляемого транспортного средства согласно этому варианту осуществления, используется автоматически управляемое транспортное средство 1A, которое использует аккумулятор B1, к примеру, свинцовый аккумулятор, широко используемый в предшествующем уровне техники, в качестве источника энергии приведения в движение, как проиллюстрировано на фиг. 2. Помимо этого, в процессе транспортировки в качестве предпосылки этого варианта осуществления, автоматическое зарядное устройство 3A аккумулятора, используемое в свинцовом аккумуляторе, широко используемом в предшествующем уровне техники для заряда аккумулятора B1 автоматически управляемого транспортного средства 1A, устанавливается в зарядной станции CS. Помимо этого, согласно этому варианту осуществления, в процессе транспортировки в качестве предпосылки, предполагается, что новое автоматически управляемое транспортное средство 1B, которое использует аккумулятор B2 литий-ионной аккумуляторной батареи в качестве источника энергии приведения в движение, последовательно загружается, как проиллюстрировано на фиг. 3. Иными словами, согласно этому варианту осуществления, все аккумуляторы автоматически управляемых транспортных средств 1 не заменяются полностью. Вместо этого, аккумулятор B1 последовательно заменяется аккумулятором B2, и автоматическое зарядное устройство 3 аккумулятора зарядной станции CS также последовательно заменяется из зарядного устройство свинцового типа аккумулятора в литий-ионный тип аккумулятора. В дальнейшем в этом документе, автоматически управляемое транспортное средство 1A, которое использует аккумулятор B1, широко используемый в предшествующем уровне техники в качестве источника энергии приведения в движение, упоминается в качестве "автоматически управляемого транспортного средства PB-типа", а автоматически управляемое транспортное средство 1B, которое использует новый аккумулятор B2 в качестве источника энергии приведения в движение, упоминается в качестве "автоматически управляемого транспортного средства LB-типа."
[0014] Сначала приводится описание автоматически управляемого транспортного средства 1A PB-типа и автоматического зарядного устройства 3A аккумулятора зарядной станции CS в процессе транспортировки в качестве предпосылки. Ящик 5 для аккумулятора автоматически управляемого транспортного средства 1A PB-типа имеет аккумулятор B1, полученный посредством последовательного подключения свинцовых аккумуляторов, как проиллюстрировано на фиг. 4. Электрическая энергия аккумулятора B1 подается в приводной двигатель (не проиллюстрирован) и т.п. в качестве источника питания. Состояние заряда/разряда аккумулятора B1 отслеживается посредством контроллера (не проиллюстрирован), смонтированного в транспортном средстве. Контроллер определяет напряжение, температуру и т.п. аккумулятора B1 и вычисляет зарядную емкость аккумулятора B1. Помимо этого, контроллер определяет то, требуется или нет операция заряда, на основе вычисленной зарядной емкости (напряжения аккумулятора). В аккумуляторе B1 определяется то, что требуется операция заряда, например, когда напряжение аккумулятора ниже 21 В.
[0015] Если определено то, что требуется операция заряда, контроллер осуществляет управление таким образом, что автоматически управляемое транспортное средство 1A PB-типа паркуется в зарядной станции CS по маршруту R движения. Помимо этого, если идентифицируется, что автоматически управляемое транспортное средство 1A PB-типа паркуется в предварительно определенной позиции зарядной станции CS, как проиллюстрировано на фиг. 4, автоматическое зарядное устройство 3A аккумулятора зарядной станции CS приводит в действие питающий контактор 23 к автоматически управляемому транспортному средству 1 PB-типа. Если питающий контактор 23 подключается к приемному контактору 13, устанавливается состояние возможности выполнения заряда.
[0016] Модуль 3A автоматического заряда аккумулятора содержит источник 21 питания постоянного тока, допускающий повышение значения зарядного напряжения, например, до 29 В, и зарядный контроллер 20, активируемый, когда питающий контактор 23 и приемный контактор 13 подключаются между собой, чтобы управлять значением зарядного тока и значением зарядного напряжения, подаваемыми из источника 21 питания постоянного тока в аккумулятор B1.
[0017] Зарядный контроллер 20 заряжает аккумулятор B1 в режиме быстрого заряда. Режим быстрого заряда представляет собой способ заряда при неизменяющемся токе и при неизменяющемся напряжении, в котором зарядный ток, больший зарядного тока операции нормального заряда, подается в аккумулятор B1. Режим быстрого заряда является подходящим для процесса транспортировки, в котором требуется операция кратковременного заряда. Между тем, зарядный контроллер 20 также может выполнять режим нормального заряда при неизменяющемся токе/при неизменяющемся напряжении. В режиме заряда при неизменяющемся токе/при неизменяющемся напряжении, операция заряда при неизменяющемся токе (CC-заряда) выполняется на начальной стадии операции заряда, в которой подается неизменяющийся зарядный ток. После того, как напряжение аккумулятора увеличивается до полного зарядного напряжения (например, 29 В) посредством непрерывного выполнения операции заряда, операция заряда при неизменяющемся напряжении (CV-заряда), в которой напряжение является неизменяющимся, выполняется до тех пор, пока не истечет предварительно определенное время. Фиг. 5 является характеристической схемой, иллюстрирующей изменение напряжения аккумулятора в ходе операции заряда и изменение подаваемого зарядного тока. Напряжение аккумулятора постепенно увеличивается посредством операции CC-заряда. Когда увеличивается напряжение аккумулятора до полного зарядного напряжения (например, 29 В), операция заряда при неизменяющемся напряжении (CV-заряда), в которой напряжение является неизменяющимся, выполняется посредством уменьшения зарядного тока от этого времени до тех пор, пока не истечет предварительно определенное время. Когда истекает предварительно определенное время, зарядный контроллер 20 останавливает источник 21 питания постоянного тока, чтобы прерывать операцию заряда. Помимо этого, питающий контактор 23 убирается и отсоединяется от приемного контактора 13 автоматически управляемого транспортного средства 1. Затем, автоматически управляемое транспортное средство 1A PB-типа движется по маршруту R движения таким образом, что оно отъезжает от зарядной станции CS.
[0018] Автоматически управляемое транспортное средство 1B LB-типа содержит аккумулятор B2, сформированный из литий-ионного аккумулятора, как проиллюстрировано на фиг. 6. Помимо этого, автоматически управляемое транспортное средство 1B LB-типа содержит контроллер 11 заряда аккумулятора, смонтированный в транспортном средстве. Контроллер 11 заряда аккумулятора представляет собой контроллер для мониторинга, вычисления и управления состоянием заряда аккумулятора B2.
[0019] Если определено то, что требуется операция заряда, контроллер 11 заряда аккумулятора начинает операцию подготовки к приему энергии. В операции подготовки к приему энергии контроллер 11 заряда аккумулятора инструктирует реле 12A управления приемом энергии переключать переключатель 12 питания, предоставленный в тракте заряда между аккумулятором B2 и зарядным контактором 13, из выключенного состояния на включенное состояние, чтобы получать заряжаемое состояние. Когда начинается операция заряда, и напряжение аккумулятора увеличивается до предварительно определенного напряжения, контроллер 11 заряда аккумулятора инструктирует реле 12A управления приемом энергии переключать переключатель 12 питания из включенного состояния в выключенное состояние, чтобы прекращать операцию заряда.
[0020] Аккумулятор B2 представляет собой, например, литий-ионную аккумуляторную батарею. Аккумулятор B2 имеет аккумуляторный модуль BM, подключенный последовательно через шинную систему BB. На фиг. 6, три аккумуляторных модуля BM подключены последовательно.
[0021] Аккумуляторный модуль BM состоит из множества параллельно или последовательно подключенных литий-ионных единичных гальванических элементов. Напряжение аккумуляторного модуля BM задается равным приблизительно 8 В в состоянии заряда. Поскольку аккумулятор B2 имеет три подключенные последовательно аккумуляторных модуля BM, выходное напряжение аккумулятора B2 становится равным приблизительно 25 В. Следовательно, напряжение избыточного заряда аккумулятора B2 задается равным, например, 25,02 В, и напряжение избыточного разряда задается равным, например, 18 В. Напряжения для начала заряда и завершения заряда задаются равными, например, 21 В и 24 В, соответственно, между напряжением избыточного заряда и напряжением избыточного разряда. Посредством задания большей разности напряжений между напряжением избыточного разряда и напряжением для начала заряда таким образом, аккумулятор B2 защищен от достижения напряжения избыточного разряда.
[0022] Контроллер 11 заряда аккумулятора может передавать наружу величину заряда (напряжение) LB-аккумулятора B2, величину входного-выходного тока (ампер-час, AH) LB-аккумулятора B2, предысторию отказов LB-аккумулятора B2 и т.п. с использованием модуля 14 связи (например, оптической связи).
[0023] Когда напряжение аккумулятора понижается до значения ниже напряжения для начала заряда, контроллер 11 заряда аккумулятора инструктирует автоматически управляемому транспортному средству 1B LB-типа останавливаться в зарядной станции CS по маршруту R движения. Помимо этого, если определено то, что автоматически управляемое транспортное средство 1B LB-типа останавливается в предварительно определенной позиции зарядной станции CS, автоматическое зарядное устройство 3A аккумулятора зарядной станции CS выдвигает питающий контактор 23 к автоматически управляемому транспортному средству 1B LB-типа, как проиллюстрировано на фиг. 6. Когда питающий контактор 23 подключается к приемному контактору 13, устанавливается состояние возможности выполнения заряда.
[0024] Если аккумулятор B2 имеет состояние завершения заряда, размыкается переключатель 12 питания, и прекращается зарядный ток автоматического зарядного устройства 3A аккумулятора. Помимо этого, посредством убирания питающего контактора 23, приемный контактор 13 автоматически управляемого транспортного средства 1B LB-типа отсоединяется от питающего контактора 23. Затем, автоматически управляемое транспортное средство 1B LB-типа отсоединяется от зарядной станции CS и движется по маршруту R движения.
[0025] В процессе транспортировки, автоматическое зарядное устройство 3A аккумулятора для аккумулятора B1 уже установлено в зарядной станции CS. Хотя автоматически управляемое транспортное средство 1A PB-типа, имеющее аккумулятор B1, и автоматически управляемое транспортное средство 1B LB-типа, имеющее новый аккумулятор B2, смешанно предоставляются по маршруту R движения, компоненты загружаются и транспортируются от станции PS сортировки на сборочную станцию BS.
[0026] Когда снижается напряжение аккумулятора, и требуется операция заряда, автоматически управляемое транспортное средство 1A PB-типа останавливается в зарядной станции CS по маршруту R движения и заряжается в последовательности, описанной выше.
[0027] Если аккумулятор B полностью заряжен, автоматическое зарядное устройство 3A аккумулятора определяет то, что операция заряда завершается, так что приемный контактор 13 автоматически управляемого транспортного средства 1A PB-типа отсоединяется посредством убирания питающего контактора 23. Затем, автоматически управляемое транспортное средство 1A PB-типа движется по маршруту R движения таким образом, что оно отъезжает от зарядной станции CS.
[0028] В автоматически управляемом транспортном средстве 1B LB-типа, если контроллер 11 заряда аккумулятора, смонтированный в транспортном средстве, определяет то, что снижается напряжение аккумулятора, и требуется операция заряда, переключатель 12 питания переключается из разомкнутого состояния в замкнутое состояние посредством активации реле 12A управления приемом энергии в ответ на команду из контроллера 11 заряда аккумулятора. Помимо этого, автоматически управляемое транспортное средство 1B LB-типа останавливается в зарядной станции CS в ответ на команду из контроллера 11 заряда аккумулятора. Если идентифицируется, что автоматически управляемое транспортное средство 1B LB-типа останавливается в предварительно определенной позиции зарядной станции CS, автоматическое зарядное устройство 3A аккумулятора зарядной станции CS выдвигает питающий контактор 23 к автоматически управляемому транспортному средству 1B LB-типа, как проиллюстрировано на фиг. 6. Когда питающий контактор 23 подключается к приемному контактору 13, устанавливается состояние возможности выполнения заряда.
[0029] Когда питающий контактор 23 и приемный контактор 13 подключаются между собой, модуль 3A автоматического заряда аккумулятора активирует источник 21 питания постоянного тока, чтобы управлять значением зарядного тока и значением зарядного напряжения, подаваемыми в зарядный аккумулятор B2 из источника 21 питания постоянного тока. В частности, аналогично операции заряда аккумулятора B1, операция заряда при неизменяющемся токе (CC-заряда) для подачи неизменяющегося тока выполняется на начальной стадии операции заряда, как проиллюстрировано на фиг. 5.
[0030] Напряжение аккумулятора увеличивается с напряжения для начала заряда, когда выполняется операция заряда. Увеличение напряжения аккумулятора отслеживается посредством контроллера 11 заряда аккумулятора, смонтированного на транспортном средстве, и зарядного контроллера 20 на стороне оборудования. Когда напряжение аккумулятора достигает напряжения для завершения заряда, контроллер 11 заряда аккумулятора, смонтированный на транспортном средстве, активирует реле 12A управления приемом энергии для того, чтобы выключать переключатель 12 питания и отсоединять аккумулятор B2 от приемного контактора 13, чтобы завершать операцию заряда. Когда электрический ток, протекающий в аккумулятор B2 через питающий контактор 23, снижается до нуля посредством отключения переключателя 12 питания, автоматическое зарядное устройство 3A аккумулятора зарядной станции CS останавливает источник 21 питания постоянного тока, чтобы прерывать операцию заряда.
[0031] Затем, автоматическое зарядное устройство 3A аккумулятора зарядной станции CS отсоединяет приемный контактор 13 автоматически управляемого транспортного средства 1B LB-типа посредством убирания питающего контактора 23. Когда контакторы 13 и 23 отсоединяются друг от друга, автоматически управляемое транспортное средство 1B LB-типа отсоединяется от зарядной станции CS и движется по маршруту R движения.
[0032] Напряжение аккумулятора автоматически управляемого транспортного средства 1B LB-типа, имеющего аккумулятор B2, изменяется, как проиллюстрировано на фиг. 7. Иными словами, во времена t0, t2 и t4, когда напряжение аккумулятора ниже напряжения для начала заряда, переключатель 12 питания замыкается посредством управления реле 12A управления зарядом. Во времена t1 и t3, когда напряжение аккумулятора выше напряжения завершения приема, переключатель 12 питания переключается из замкнутого состояния в разомкнутое состояние с использованием реле 12A управления зарядом. По этой причине, напряжение аккумулятора увеличивается с состояния ниже напряжения включения зарядного реле до состояния выше напряжения выключения зарядного реле каждый раз, когда выполняется операция заряда. Когда автоматически управляемое транспортное средство 1B LB-типа движется по маршруту R движения, потребляется питание аккумулятора, так что напряжение аккумулятора постепенно снижается с состояния выше напряжения выключения зарядного реле до состояния ниже напряжения включения зарядного реле.
[0033] Согласно этому варианту осуществления, можно обеспечивать следующие преимущества.
[0034] (1) Предусмотрена система управления зарядом аккумулятора автоматически управляемого транспортного средства 1, которое движется без водителя посредством использования смонтированного аккумулятора B в качестве источника приведения в движение и выполняет операцию заряда для смонтированного аккумулятора B в зарядной станции CS. Автоматически управляемое транспортное средство 1 имеет литий-ионный аккумулятор B2 в качестве смонтированного аккумулятора B и контроллер 11 заряда аккумулятора, который отслеживает оставшуюся емкость смонтированного аккумулятора B2. Помимо этого, когда оставшаяся емкость аккумулятора B2 ниже предварительно определенного значения, контроллер 11 заряда аккумулятора инструктирует зарядной станции CS начинать операцию заряда для смонтированного аккумулятора B2. Помимо этого, когда величина заряда смонтированного аккумулятора B2 достигает предварительно определенной емкости в ходе операции заряда, контроллер 11 заряда аккумулятора завершает операцию заряда для смонтированного аккумулятора B2 посредством переключения переключателя 12 питания в качестве переключателя управления приемом энергии, предоставленного в тракте заряда транспортного средства, в выключенное состояние.
[0035] Иными словами, когда контроллер 11 заряда аккумулятора, смонтированный на стороне автоматически управляемого транспортного средства 1, определяет то, что операция заряда смонтированного аккумулятора B2 завершается, тракт заряда прерывается с использованием переключателя 12 питания в качестве переключателя управления приемом энергии, так что завершается операция заряда. Следовательно, автоматическое зарядное устройство 3A аккумулятора, предоставленное в зарядной станции CS, не должно изменять состояние заряда в зависимости от типа аккумулятора, смонтированного на автоматически управляемом транспортном средстве 1. По этой причине, можно непосредственно использовать, в качестве зарядного устройства аккумулятора для литий-ионного аккумулятора B2, зарядное устройство 3A аккумулятора для свинцового аккумулятора, уже предоставленное в процессе транспортировки в качестве зарядного устройства аккумулятора, установленного в зарядной станции. Помимо этого, поскольку устройство для различения типа смонтированного аккумулятора B не требуется в отличие от предшествующего уровня техники, можно уменьшать затраты на заряд аккумулятора. Кроме того, даже когда используется, например, зарядное устройство 3A аккумулятора для свинцового аккумулятора, имеющего высокое заданное значение конечного напряжения для операции заряда, можно заряжать литий-ионный аккумулятор B2 при том, что исключается избыточный заряд.
[0036] (2) Когда оставшаяся емкость смонтированного аккумулятора B2 ниже предварительно определенного значения, контроллер 11 заряда аккумулятора инструктирует переключателю 12 питания в качестве переключателя управления приемом энергии, предоставленного в середине тракта заряда транспортного средства, переключаться из выключенного состояния во включенное состояние. По этой причине, когда зарядное устройство 3A аккумулятора для свинцового аккумулятора, имеющего рабочий диапазон напряжений, шире рабочего диапазона напряжений литий-ионного аккумулятора B2, используется в качестве зарядного устройства аккумулятора для литий-ионного аккумулятора B2, диапазон напряжений, требуемый для использования в литий-ионном аккумуляторе B2, может задаваться произвольно посредством выполнения обозначения с использованием контроллера 11 заряда аккумулятора. Как результат, можно всегда использовать промежуточный диапазон емкости, в котором эффективность использования является высокой в силу характера литий-ионного аккумулятора B2, и повышать срок службы литий-ионного аккумулятора B2.
[0037] Второй вариант осуществления
Далее приводится описание для системы управления зарядом аккумулятора и способа управления зарядом аккумулятора автоматически управляемого транспортного средства согласно второму варианту осуществления этого варианта осуществления со ссылкой на фиг. 8-11. Фиг. 8 является пояснительной схемой, иллюстрирующей общее представление маршрута движения. Фиг. 9 является схемой конфигурации системы. Фиг. 10 является характеристической схемой, иллюстрирующей изменения напряжения аккумулятора и зарядного тока в ходе операции заряда. Фиг. 11 является блок-схемой последовательности операций способа, иллюстрирующей операции автоматически управляемого транспортного средства и модуля автоматического заряда аккумулятора в ходе операции заряда.
[0038] Согласно второму варианту осуществления, автоматическое зарядное устройство 3B аккумулятора LB-типа, выделяемое для автоматически управляемого транспортного средства 1B LB-типа, имеющего новый аккумулятор B2, добавляется в конфигурацию первого варианта осуществления. Следует отметить, что аналогичные ссылки с номерами обозначают аналогичные элементы из первого варианта осуществления, и они не описываются повторно для простоты.
[0039] Как проиллюстрировано на фиг. 8, зарядная станция CS по маршруту R движения автоматически управляемого транспортного средства 1 согласно этому варианту осуществления дополнительно содержит автоматическое зарядное устройство 3A аккумулятора PB-типа, которое выполняет операцию заряда для аккумулятора B1 автоматически управляемого транспортного средства 1A PB-типа, и автоматическое зарядное устройство 3B аккумулятора LB-типа, выделяемое автоматически управляемому транспортному средству 1B LB-типа, имеющему аккумулятор B2. Автоматическое зарядное устройство 3B аккумулятора LB-типа, добавленное как новое для аккумулятора B2, содержит источник 21A питания постоянного тока, допускающий повышение напряжения до верхнего предельного напряжения (например, 25,02 В) аккумулятора B2, зарядный контроллер 20A, который управляет значением зарядного тока и значением зарядного напряжения, подаваемыми из источника 21A питания постоянного тока в аккумулятор B2, и модуль 24 связи, который может обмениваться данными с модулем 14 связи автоматически управляемого транспортного средства 1, как проиллюстрировано на фиг. 9.
[0040] Зарядный контроллер 20A автоматического зарядного устройства 3B аккумулятора LB-типа активируется после того, как питающий контактор 23 подключается к приемному контактору 13, переключатель 12 питания замыкается посредством операции реле 12A управления приемом энергии автоматически управляемого транспортного средства 1B LB-типа, и определяется напряжение аккумулятора B2 до операции заряда. Зарядный контроллер 20A заряжает аккумулятор B2 в режиме быстрого заряда. Режим быстрого заряда представляет собой способ заряда при неизменяющемся токе/при неизменяющемся напряжении, в котором зарядный ток, больший зарядного тока режима нормального заряда, подается в аккумулятор B2. Режим быстрого заряда является подходящим для процесса транспортировки, в котором необходимо выполнять операцию заряда за короткое время. Тем не менее, зарядный контроллер 20 также является применимым к режиму нормального заряда при неизменяющемся токе/при неизменяющемся напряжении. В режиме заряда при неизменяющемся токе/при неизменяющемся напряжении, операция заряда при неизменяющемся токе (CC-заряда), в которой подается неизменяющийся зарядный ток, выполняется на начальной стадии заряда. Когда напряжение аккумулятора увеличивается до полного зарядного напряжения (например, 25 В), когда непрерывно выполняется операция заряда, операция заряда при неизменяющемся напряжении (CV-заряда), в которой подается неизменяющееся напряжение, выполняется до тех пор, пока не истечет предварительно определенное время.
[0041] Фиг. 10 иллюстрирует изменение напряжения аккумулятора и изменение подаваемого зарядного тока в ходе операции заряда. Напряжение аккумулятора постепенно увеличивается, когда выполняется операция CC-заряда. Когда напряжение аккумулятора увеличивается до верхнего предела зарядного напряжения (например, 25 В), операция заряда при неизменяющемся напряжении (CV-заряда), в которой напряжение является неизменяющимся, выполняется посредством понижения зарядного тока от этого времени до тех пор, пока не истечет предварительно определенное время. Когда истекает предварительно определенное время, зарядный контроллер 20A останавливает источник 21A питания постоянного тока, чтобы прерывать операцию заряда. Альтернативно, операция CC-заряда может выполняться, и операция заряда может прекращаться в качестве завершения заряда, когда напряжение аккумулятора автоматически управляемого транспортного средства 1B увеличивается до верхнего предела зарядного напряжения. Если операция заряда завершается, когда напряжение аккумулятора увеличивается до верхнего предела зарядного напряжения, можно исключать операцию заряда при неизменяющемся постоянном напряжении (CV-заряда), выполняемую только в течение предварительно определенного времени после этого, и уменьшать время заряда.
[0042] Модуль 24 связи может обмениваться данными с модулем 14 связи автоматически управляемого транспортного средства 1B LB-типа, чтобы обмениваться зарядной емкостью (напряжением) аккумулятора B2, величиной входного-выходного тока (ампер-час, AH) аккумулятора B, предысторией отказов аккумулятора B, сигналом управления включением/выключением реле управления приемом энергии автоматически управляемого транспортного средства 1, другими сигналами команд управления и т.п.
[0043] В дальнейшем в этом документе описывается последовательность операции заряда для аккумулятора B2, смонтированного на автоматически управляемом транспортном средстве 1B LB-типа, со ссылкой на блок-схему последовательности операций способа по фиг. 11. Левый столбец на чертеже обозначает последовательность операций автоматически управляемого транспортного средства 1B LB-типа, а правый столбец обозначает последовательность операций автоматического зарядного устройства 3B аккумулятора LB-типа на стороне оборудования. Ссылки с номерами NP1 и NP1, противостоящие друг другу в центре чертежа, обозначают модули связи посредством оптической связи в автоматически управляемом транспортном средстве 1B LB-типа и автоматическом зарядном устройстве 3B аккумулятора LB-типа на стороне оборудования.
[0044] Когда контроллер 11 заряда аккумулятора, смонтированный на транспортном средстве, определяет то, что требуется операция заряда, когда снижается напряжение аккумулятора, автоматически управляемое транспортное средство 1B LB-типа управляется таким образом, что двигается к автоматическому зарядному устройству 3B аккумулятора LB-типа зарядной станции CS по маршруту R движения и останавливается в предварительно определенной позиции (S1).
[0045] Затем определяется то, могут или нет модули 14 и 24 связи автоматически управляемого транспортного средства 1B LB-типа и автоматического зарядного устройства 3B аккумулятора LB-типа стабильно обмениваться данными друг с другом (S2, S22). Если определено то, что они находятся в диапазоне стабильной связи, состояние автоматического заряда проверяется между стороной автоматического зарядного устройства 3B аккумулятора LB-типа и стороной автоматически управляемого транспортного средства 1B LB-типа (S3, S23). Состояние автоматического заряда проверяется таким образом, что то, является состояние аккумулятора B2 нормальным или анормальным, запрашивается из стороны автоматического зарядного устройства 3B аккумулятора LB-типа в сторону автоматически управляемого транспортного средства 1B LB-типа, и нормальный ответ возвращается со стороны автоматически управляемого транспортного средства 1B LB-типа.
[0046] Затем, питающий контактор 23 выдвигается из автоматического зарядного устройства 3B аккумулятора LB-типа в автоматически управляемое транспортное средство 1B LB-типа и подключается к приемному контактору 13 автоматически управляемого транспортного средства 1B LB-типа, и команда активации контакта выводится в автоматически управляемое транспортное средство 1B LB-типа (S24). Автоматически управляемое транспортное средство 1B LB-типа проверяет состояние заряда (S4) и активирует реле 12A управления приемом энергии для того, чтобы замыкать переключатель 12 питания, предоставленный в тракте заряда, на котором подключаются аккумулятор B2 и зарядный контактор 13 (S5). Когда контакторы 13 и 23 подключаются между собой, и замыкается переключатель 12 питания, модуль 3B автоматического заряда аккумулятора LB-типа проверяет напряжение аккумулятора автоматически управляемого транспортного средства 1B LB-типа (S25).
[0047] Затем, автоматическое зарядное устройство 3B аккумулятора LB-типа активирует источник 21A питания постоянного тока, чтобы запрашивать то, завершена или нет операция подготовки к заряду для автоматически управляемого транспортного средств 1B LB-типа (S26). Если проверяется то, завершена или нет операция подготовки к заряду (S6), и операция подготовки к заряду завершена, автоматически управляемое транспортное средство 1B LB-типа выводит сигнал нормального ответа в автоматическое зарядное устройство 3B аккумулятора LB-типа (S7). Автоматическое зарядное устройство 3B аккумулятора LB-типа подает энергию постоянного тока из источника 21A питания постоянного тока в аккумулятор B2 автоматически управляемого транспортного средства 1B LB-типа через питающий контактор 23, приемный контактор 13 и переключатель 12 питания в ответ на сигнал нормального ответа из автоматически управляемого транспортного средства 1B LB-типа, так что начинается операция заряда (S27).
[0048] Автоматическое зарядное устройство 3B аккумулятора LB-типа активирует таймер заряда (S28) и останавливает источник 21A питания постоянного тока, чтобы прерывать операцию заряда, когда напряжение и время, заданные в таймере, истекают (S29). Между тем, автоматически управляемое транспортное средство 1B LB-типа отслеживает напряжение состояния заряда аккумулятора (S8) и проверяет завершение заряда, когда операция заряда прерывается (S9).
[0049] Затем, автоматическое зарядное устройство 3B аккумулятора LB-типа останавливает источник 21A питания постоянного тока и запрашивает в автоматически управляемом транспортном средстве 1B LB-типа то, имеется или нет команда деактивации контакта, и может или нет отсоединяться зарядная схема (S30). Автоматически управляемое транспортное средство 1B LB-типа активирует реле 12A управления приемом энергии для того, чтобы размыкать переключатель 12 питания, предоставленный в тракте заряда, на котором подключаются аккумулятор B2 и зарядный контактор 13 (S10), и выключает завершение подготовки к заряду автоматически управляемого транспортного средства 1B LB-типа, так что нормальный ответ (отсоединение: OK) выводится в автоматическое зарядное устройство 3A аккумулятора LB-типа (S11).
[0050] Автоматическое зарядное устройство 3B аккумулятора LB-типа прекращает соединение с приемным контактором 13 на стороне автоматически управляемого транспортного средства 1B LB-типа посредством втягивания питающего контактора 23 в ответ на нормальный ответ из автоматически управляемого транспортного средства 1B LB-типа (S31) и выводит команду разрешения прекращения в автоматически управляемое транспортное средство 1B LB-типа (S32). Автоматически управляемое транспортное средство 1B LB-типа движется таким образом, что оно отъезжает от зарядной станции CS в ответ на команду разрешения прекращения (S12). Затем, автоматически управляемое транспортное средство 1B LB-типа возвращается на маршрут R движения и движется.
[0051] Согласно этому варианту осуществления, можно обеспечивать следующие преимущества в дополнение к преимуществам (1) первого варианта осуществления.
[0052] (3) Зарядная станция CS выполнена с возможностью передавать/принимать сигналы в/из автоматически управляемого транспортного средства 1 с использованием модулей 14 и 24 связи. Помимо этого, в зарядной станции CS, контроллер 11 заряда аккумулятора, смонтированный на транспортном средстве, управляет размыканием/замыканием переключателя 12 питания в качестве переключателя управления приемом энергии, предоставленного в середине тракта заряда транспортного средства, в ответ на команду из зарядной станции CS. По этой причине, можно активировать переключатель управления приемом энергии и приемный контактор 13 автоматически управляемого транспортного средства 1B только тогда, когда выполняется связь с зарядной станцией CS. Следовательно, можно уменьшать потребление энергии реле 12A управления приемом энергии для управления переключателем управления приемом энергии и эффективно использовать аккумулятор B2. Помимо этого, можно ограничивать время для активации приемного контактора 13 только временем заряда. Иными словами, поскольку приемный контактор 13 не активируется за исключением времени операции заряда, можно минимизировать или исключать защиту контактов.
[0053] Хотя варианты осуществления этого изобретения описаны выше, они служат просто для иллюстрации для осуществления вариантов применения этого изобретения и не имеют намерение ограничивать сущность и объем этого изобретения такими конкретными конфигурациями.
[0054] Например, вышеуказанные варианты осуществления могут надлежащим образом комбинироваться.
[0055] Данная заявка основана на и испрашивает приоритет выложенной заявки на патент (Япония) номер 2012-171713, поданной в Патентное бюро (Япония) 2 августа 2012 года, содержимое которой полностью содержится в данном документе по ссылке.
Использование: в области электротехники. Технический результат - обеспечение заряда автоматически управляемого транспортного средства, в котором монтируются различные типы аккумуляторов. Раскрыта система управления зарядом аккумулятора автоматически управляемого транспортного средства (АУТС) первого типа, которое движется без водителя посредством использования первого типа смонтированного аккумулятора в качестве источника приведения в движение, причем указанный смонтированный аккумулятор заряжается в зарядной станции. Система также содержит АУТС второго типа, которое движется без водителя посредством использования второго типа смонтированного аккумулятора, имеющего зарядное напряжение ниже полного зарядного напряжения аккумулятора первого типа. При этом первый тип АУТС не содержит контроллер для управления напряжением аккумулятора первого типа в ходе заряда. Первый тип смонтированного аккумулятора заряжается в то время, когда напряжение управляется посредством первого контроллера заряда, предоставленного в автоматическом зарядном устройстве аккумулятора. Второй АУТС содержит контроллер заряда аккумулятора, который управляет напряжением заряда аккумулятора второго типа, смонтированного в зарядной станции, и выполняет операцию заряда с использованием автоматического зарядного устройства, когда напряжение смонтированного аккумулятора второго типа ниже предварительно определенного напряжения, ниже полного зарядного напряжения аккумулятора второго типа. Тракт заряда транспортного средства прерывается, когда напряжение смонтированного аккумулятора второго типа в ходе заряда достигает напряжения ниже полного зарядного напряжения аккумулятора первого типа и выше предварительно определенного напряжения. 2 н. и 5 з.п. ф-лы, 11 ил.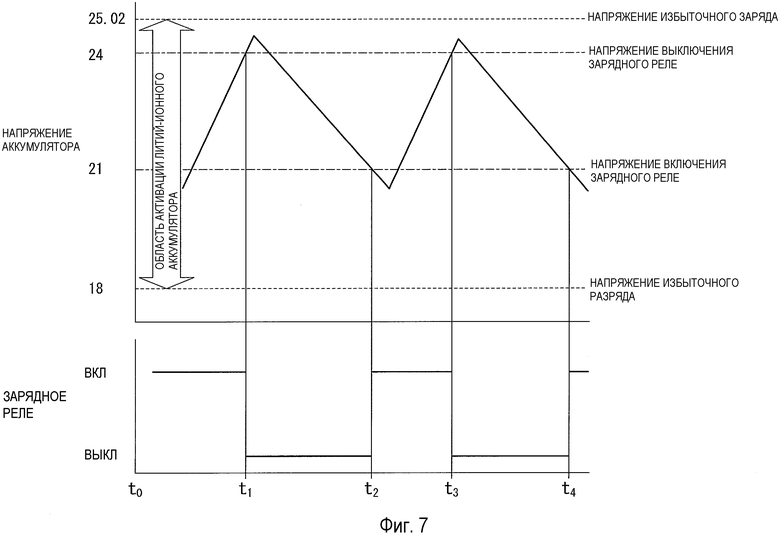
1. Система управления зарядом аккумулятора, которая управляет операциями заряда автоматически управляемых транспортных средств, включающих в себя первый тип автоматически управляемого транспортного средства, которое движется без водителя посредством использования первого типа смонтированного аккумулятора в качестве источника приведения в движение и заряжает первый тип смонтированного аккумулятора с использованием автоматического зарядного устройства аккумулятора, предоставленного в зарядной станции, и второй тип автоматически управляемого транспортного средства, которое движется без водителя посредством использования второго типа смонтированного аккумулятора в качестве источника приведения в движение, имеющего полное зарядное напряжение ниже полного зарядного напряжения первого типа смонтированного аккумулятора, и заряжает второй тип смонтированного аккумулятора с использованием автоматического зарядного устройства аккумулятора,
- при этом первый тип автоматически управляемого транспортного средства не содержит контроллер для управления напряжением первого типа смонтированного аккумулятора в ходе операции заряда,
- первый тип смонтированного аккумулятора заряжается в то время, когда напряжение управляется посредством первого контроллера заряда аккумулятора, предоставленного в автоматическом зарядном устройстве аккумулятора,
- второй тип автоматически управляемого транспортного средства содержит второй контроллер заряда аккумулятора, который управляет напряжением второго типа смонтированного аккумулятора,
- второй контроллер заряда аккумулятора выполняет операцию заряда с использованием автоматического зарядного устройства аккумулятора для второго типа смонтированного аккумулятора в зарядной станции, когда напряжение второго типа смонтированного аккумулятора ниже предварительно определенного напряжения, ниже полного зарядного напряжения второго типа смонтированного аккумулятора, и
- тракт заряда транспортного средства прерывается, когда напряжение второго типа смонтированного аккумулятора в ходе операции заряда достигает напряжения ниже полного зарядного напряжения первого типа смонтированного аккумулятора и выше предварительно определенного напряжения.
2. Система управления зарядом аккумулятора автоматически управляемого транспортного средства по п. 1, в которой второй контроллер заряда аккумулятора переключает переключатель управления приемом энергии, предоставленный в тракте заряда транспортного средства, в выключенное состояние, когда напряжение второго типа смонтированного аккумулятора в ходе операции заряда достигает напряжения ниже полного зарядного напряжения первого типа смонтированного аккумулятора и выше предварительно определенного напряжения.
3. Система управления зарядом аккумулятора автоматически управляемого транспортного средства по п. 2, в которой второй контроллер заряда аккумулятора переключает переключатель управления приемом энергии из выключенного состояния во включенное состояние, когда напряжение второго типа смонтированного аккумулятора ниже предварительно определенного напряжения.
4. Система управления зарядом аккумулятора автоматически управляемого транспортного средства по п. 3, в которой второй контроллер заряда аккумулятора переключает переключатель управления приемом энергии из выключенного состояния во включенное состояние, когда напряжение второго типа смонтированного аккумулятора ниже предварительно определенного напряжения, до того, как второй тип автоматически управляемого транспортного средства останавливается в зарядной станции.
5. Система управления зарядом аккумулятора автоматически управляемого транспортного средства по любому из пп. 2-4, в которой зарядная станция выполнена с возможностью передавать/принимать сигнал в/из автоматически управляемых транспортных средств с использованием модуля связи, и
- в зарядной станции второй контроллер заряда аккумулятора размыкает или замыкает переключатель управления приемом энергии, предоставленный в тракте заряда транспортного средства, в ответ на команду из зарядной станции.
6. Система управления зарядом аккумулятора автоматически управляемого транспортного средства по любому из пп. 1-4, в которой второй тип смонтированного аккумулятора представляет собой литий-ионный аккумулятор.
7. Способ управления зарядом аккумулятора, который управляет операциями заряда автоматически управляемых транспортных средств, включающих в себя первый тип автоматически управляемого транспортного средства, которое движется без водителя посредством использования первого типа смонтированного аккумулятора в качестве источника приведения в движение и заряжает первый тип смонтированного аккумулятора с использованием автоматического зарядного устройства аккумулятора, предоставленного в зарядной станции, и второй тип автоматически управляемого транспортного средства, которое движется без водителя посредством использования второго типа смонтированного аккумулятора в качестве источника приведения в движение, имеющего полное зарядное напряжение ниже полного зарядного напряжения первого типа смонтированного аккумулятора, и заряжает второй тип смонтированного аккумулятора с использованием автоматического зарядного устройства аккумулятора,
- при этом первый тип автоматически управляемого транспортного средства не содержит контроллер для управления напряжением первого типа смонтированного аккумулятора в ходе операции заряда,
- первый тип смонтированного аккумулятора заряжается в то время, когда напряжение управляется посредством первого контроллера заряда аккумулятора, предоставленного в автоматическом зарядном устройстве аккумулятора,
- когда второй тип смонтированного аккумулятора второго типа автоматически управляемого транспортного средства заряжается, второй контроллер заряда аккумулятора, предоставленный во втором типе автоматически управляемого транспортного средства, управляет напряжением второго типа смонтированного аккумулятора,
- операция заряда с использованием автоматического зарядного устройства аккумулятора выполняется для второго типа смонтированного аккумулятора в зарядной станции, когда напряжение второго типа смонтированного аккумулятора ниже предварительно определенного напряжения, ниже полного зарядного напряжения второго типа смонтированного аккумулятора, и
- тракт заряда транспортного средства прерывается, когда напряжение второго типа смонтированного аккумулятора в ходе операции заряда достигает напряжения ниже полного зарядного напряжения первого типа смонтированного аккумулятора и выше предварительно определенного напряжения.
| JP 2007074800A, 22.03.2007 | |||
| УСТРОЙСТВО УПРАВЛЕНИЯ ЗАРЯДОМ АККУМУЛЯТОРНОЙ БАТАРЕИ ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2025862C1 |
| УСТРОЙСТВО ДЛЯ ЗАРЯДА АККУМУЛЯТОРА | 2000 |
|
RU2206166C2 |
| US 6404163B1, 11.06.2002. | |||

