ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящее изобретение относится к системе для того, чтобы обнаруживать анормальность автоматически управляемого транспортного средства.
УРОВЕНЬ ТЕХНИКИ
[0002] JP 2007-68398A раскрывает автоматически управляемое транспортное средство, которое может заряжать аккумулятор без необходимости действий по замене аккумуляторов.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0003] Возникает риск того, что характеристики аккумулятора ухудшаются, когда он подвержен избыточному разряду. Следовательно, автоматически управляемое транспортное средство анормально останавливается (или выключается) заранее без избыточного разряда. В случае, если время заряда автоматически управляемого транспортного средства задерживается, автоматически управляемое транспортное средство может анормально останавливаться (или выключаться). В случае, если автоматически управляемое транспортное средство анормально останавливается на маршруте движения, снижается эффективность работы рабочего.
[0004] Настоящее изобретение осуществлено посредством фокусирования на такой традиционной проблеме. Цель настоящего изобретения заключается в том, чтобы предоставить систему обнаружения анормальности для автоматически управляемого транспортного средства, которая может обнаруживать анормальность автоматически управляемого транспортного средства заранее до того, как автоматически управляемое транспортное средство анормально останавливается (или выключается).
[0005] Один аспект системы для обнаружения анормальности автоматически управляемого транспортного средства, которое движется по маршруту перемещения по замкнутой траектории согласно настоящему изобретению, включает в себя: модуль записи предыстории для записи предыстории изменений тока аккумулятора автоматически управляемого транспортного средства относительно каждого перемещения по замкнутой траектории; и модуль определения анормальности для определения присутствия или отсутствия анормальности автоматически управляемого транспортного средства на основе предыстории изменений тока аккумулятора, записываемой для каждого перемещения по замкнутой траектории.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0006] Фиг. 1 является общим видом, показывающим первый вариант осуществления системы обнаружения анормальности для автоматически управляемого транспортного средства согласно настоящему изобретению.
Фиг. 2 является видом для пояснения конструкции автоматически управляемого транспортного средства и операций заряда.
Фиг. 3 является видом для пояснения конструкции ящика для аккумулятора и операций заряда.
Фиг. 4 является видом, иллюстрирующим изменение тока, когда автоматически управляемое транспортное средство совершает перемещение по замкнутой траектории по маршруту R движения.
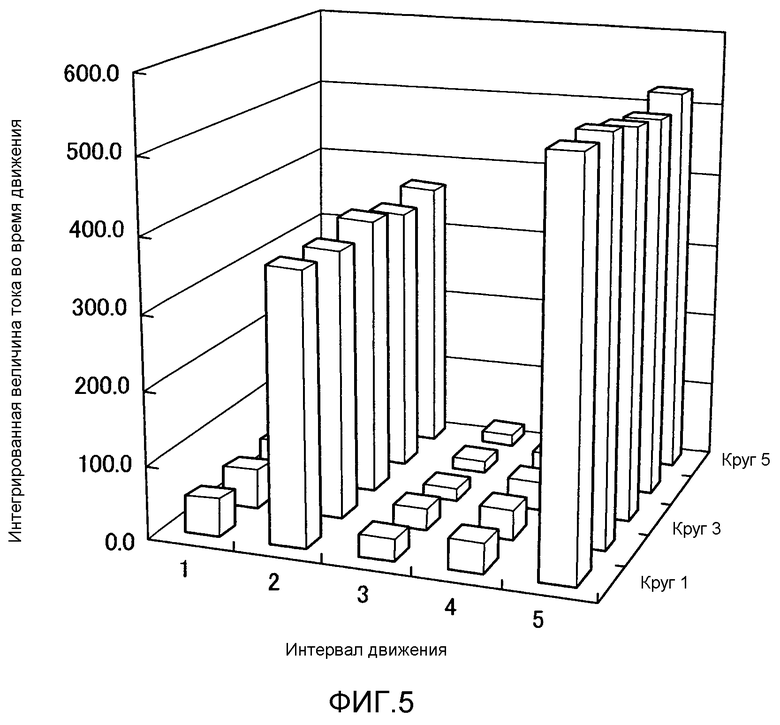
Фиг. 5 является видом, иллюстрирующим интегрированную величину (величину потребления) тока, которая выводится для каждого номера круга движения и каждого интервала движения посредством аккумулятора автоматически управляемого транспортного средства.
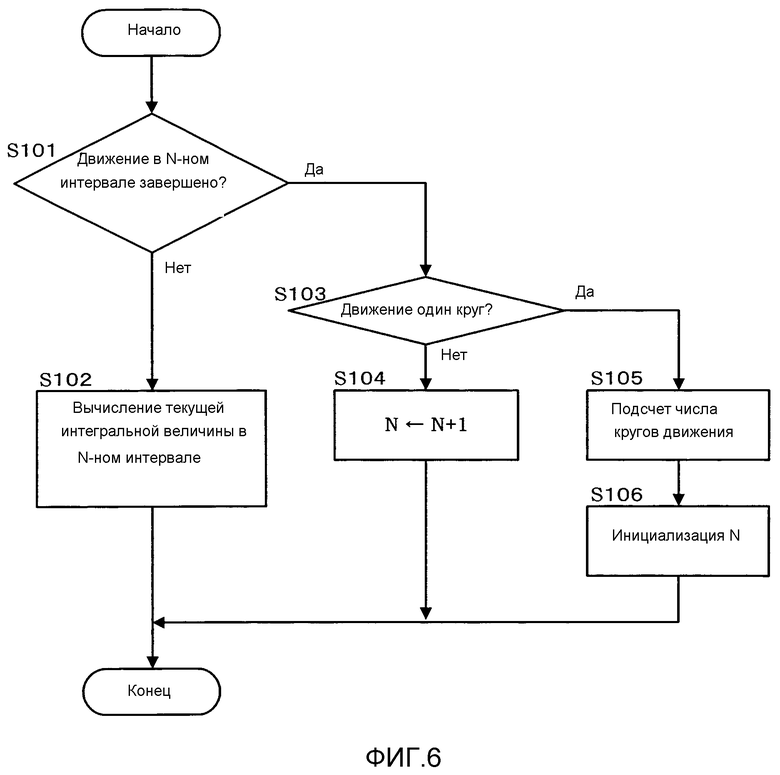
Фиг. 6 является блок-схемой последовательности операций способа, выполняемой посредством контроллера автоматически управляемого транспортного средства.
Фиг. 7 является блок-схемой последовательности операций способа, выполняемой посредством контроллера управляющего оборудования 5.
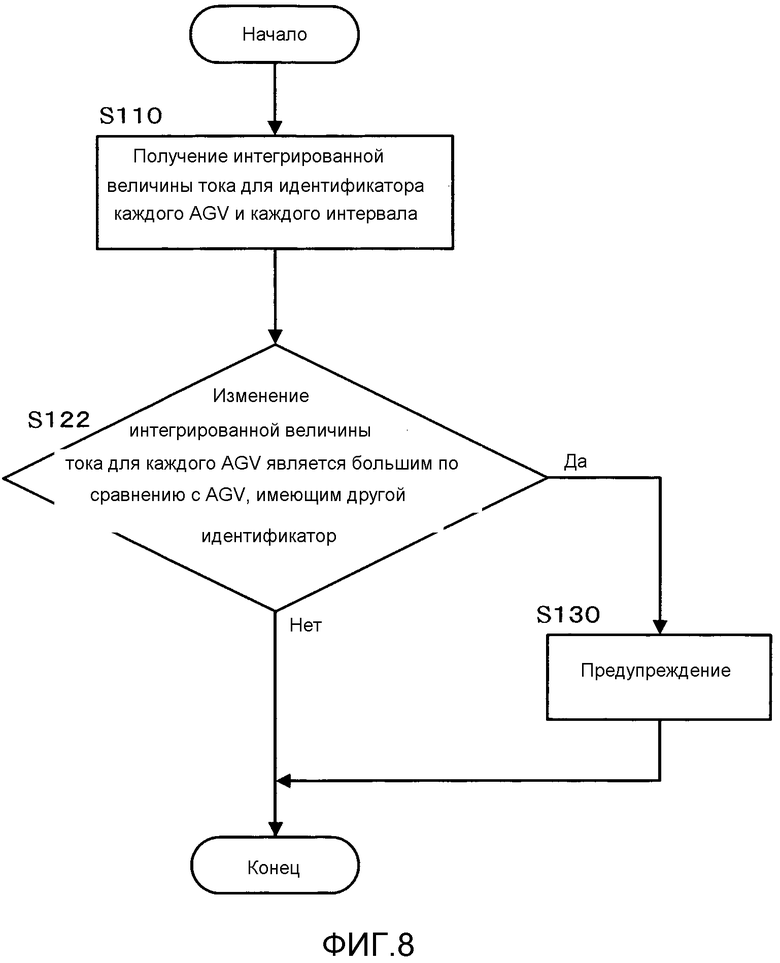
Фиг. 8 является блок-схемой последовательности операций способа, выполняемой посредством контроллера управляющего оборудования 5 согласно второму варианту осуществления.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0007] Далее описаны варианты осуществления настоящего изобретения со ссылками на чертежи.
[0008] ПЕРВЫЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ
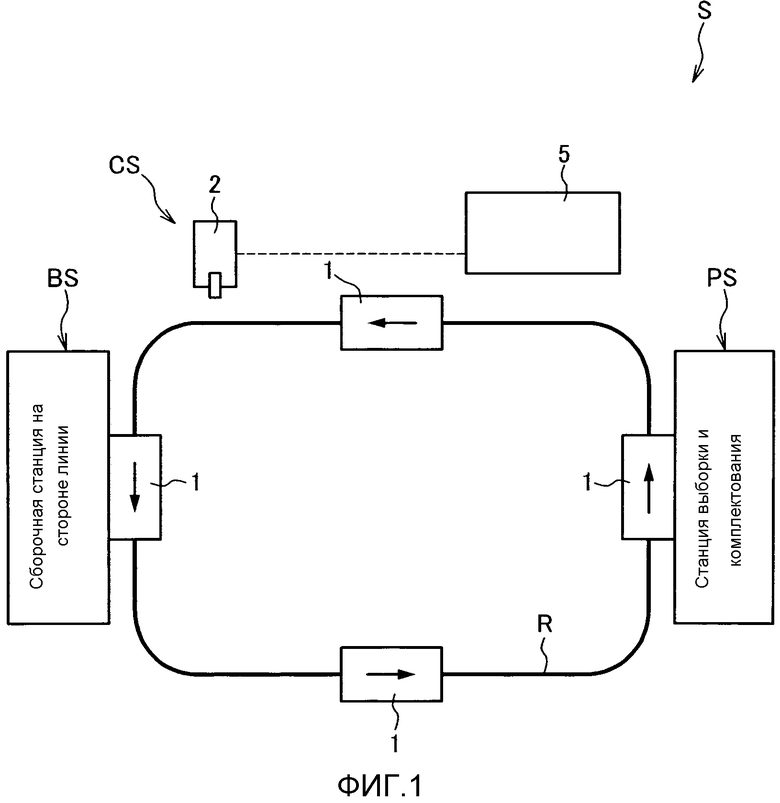
Фиг. 1 является общим видом, показывающим первый вариант осуществления системы обнаружения анормальности для автоматически управляемого транспортного средства согласно настоящему изобретению.
[0009] Система S обнаружения анормальности для автоматически управляемого транспортного средства включает в себя автоматически управляемое транспортное средство 1 (автоматически управляемое транспортное средство; AGV), зарядное устройство 2 и управляющее оборудование 5.
[0010] Автоматически управляемое транспортное средство 1 движется по замкнутому маршруту R движения, чтобы транспортировать компоненты. Маршрут R движения является орбитой, которая проходит через станцию PS выборки и комплектования, сборочную станцию BS и зарядную станцию CS. Работа автоматически управляемого транспортного средства 1 управляется посредством контроллера, смонтированного на нем. Автоматически управляемое транспортное средство 1 загружается с компонентами на станции PS выборки и комплектования. Автоматически управляемое транспортное средство 1 затем движется по маршруту R движения, чтобы транспортировать компоненты в сборочную станцию BS. Затем, автоматически управляемое транспортное средство 1 разгружает компоненты в сборочной станции BS. Затем, автоматически управляемое транспортное средство 1 движется по маршруту R движения снова, чтобы возвращаться на станцию PS выборки и комплектования. Дополнительно, автоматически управляемое транспортное средство 1 заряжается в зарядной станции CS при необходимости. В этом отношении, на фиг. 1, четыре автоматически управляемых транспортных средства 1 движутся по маршруту R движения, но на это нет ограничений. Может быть предусмотрено, по меньшей мере, одно автоматически управляемое транспортное средство, либо также может быть пять или более автоматически управляемых транспортных средств. Ниже описывается конкретный компонент автоматически управляемого транспортного средства 1.
[0011] Зарядное устройство 2 заряжает автоматически управляемое транспортное средство 1. Зарядное устройство 2 также передает и принимает сигналы в/из автоматически управляемого транспортного средства 1 при заряде. Зарядное устройство 2 устанавливается в зарядной станции CS. Зарядная станция CS предоставляется перед сборочной станцией BS, например, как показано на фиг. 1. Зарядное устройство 2 управляется посредством управляющего оборудования 5.
[0012] Управляющее оборудование 5 управляет зарядным устройством 2. Управляющее оборудование 5 также передает и принимает сигналы в/из автоматически управляемого транспортного средства 1 через зарядное устройство 2.
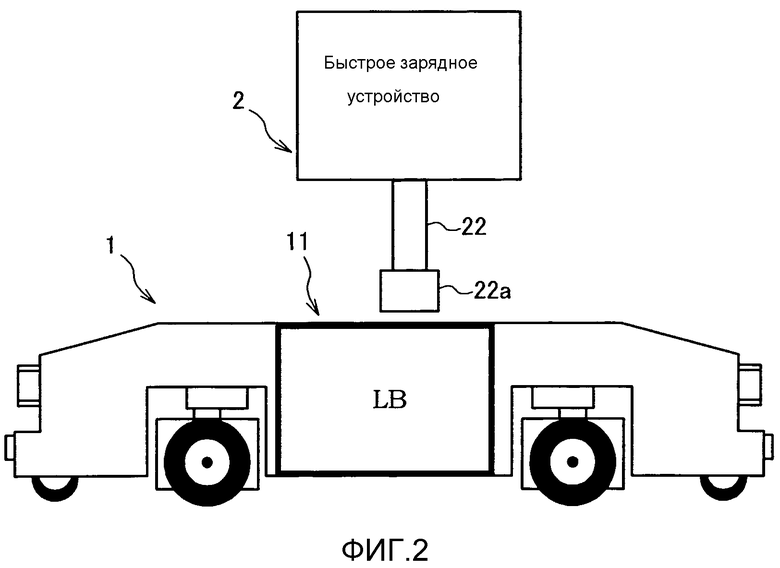
[0013] Фиг. 2 является видом для пояснения конструкции автоматически управляемого транспортного средства и операций заряда.
[0014] Автоматически управляемое транспортное средство 1 оснащается, например, ящиком 11 для аккумулятора в центре транспортного средства. Ящик 11 для аккумулятора размещает аккумулятор B и т.п. Автоматически управляемое транспортное средство 1 движется с использованием аккумулятора B в качестве источника мощности приведения в движение. Аккумулятор B заряжается посредством подключения контактора 22a для подачи мощности к зарядному устройству 2.
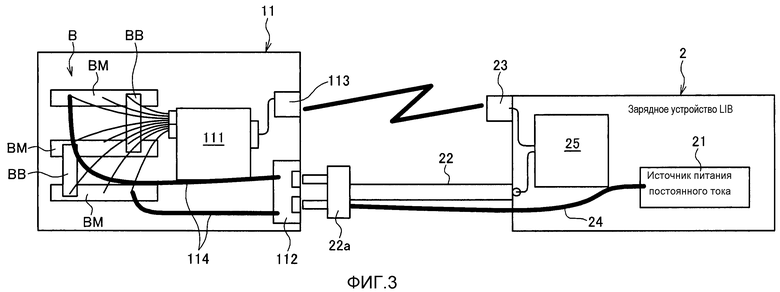
[0015] Фиг. 3 является видом для пояснения конструкции ящика для аккумулятора и операций заряда.
[0016] Ящик 11 для аккумулятора размещает аккумулятор B, монитор 111 заряда/разряда, контактор 112 для поступления мощности и порт 113 связи.
[0017] Аккумулятор B представляет собой, например, литий-ионную аккумуляторную батарею. Аккумулятор B содержит аккумуляторные модули BM, которые подключены последовательно посредством шинных систем BB. На фиг. 3, три аккумуляторных модуля BM подключены последовательно.
[0018] Аккумуляторный модуль BM конфигурируется посредством параллельного или последовательного подключения множества литий-ионных гальванических элементов (гальванических элементов). Напряжение этого аккумуляторного модуля BM составляет примерно чуть выше 8 В в состоянии заряда. Поскольку три аккумуляторных модуля BM подключены последовательно в аккумуляторе B, выходное напряжение аккумулятора B становится равным примерно 25 В.
[0019] Монитор 111 заряда/разряда отслеживает состояние аккумулятора B. Монитор 111 заряда/разряда отслеживает и записывает зарядную/разрядную емкость (напряжение аккумулятора) и напряжение гальванического элемента аккумулятора B и каждого аккумуляторного источника питания, величину тока (ампер-час; А-ч) ввода и вывода аккумулятора B и т.п. через каждое предварительно определенное время (например, 10 мс). Информация монитора 111 заряда/разряда выводится из порта 113 связи (например, оптической связи). Эта информация передается в управляющее оборудование 5 через порт 23 связи зарядного устройства 2.
[0020] Контактор 112 для поступления мощности является доступным на наружной поверхности ящика 11 для аккумулятора. Контактор 112 для поступления мощности подключается к аккумулятору B через питающие кабели 114. Контактор 22a для подачи мощности зарядного устройства 2 подключается к контактору 112 для поступления мощности. Аккумулятор B заряжается в этом состоянии.
[0021] Зарядное устройство 2 включает в себя источник 21 питания постоянного тока, рычаг 22 подачи мощности, порт 23 связи и модуль 25 управления.
[0022] Источник 21 питания постоянного тока представляет собой источник питания для заряда аккумулятора B. Источник 21 питания постоянного тока может выполнять повышение до верхнего предельного напряжения аккумулятора B.
[0023] Контактор 22a для подачи мощности предоставляется на наконечнике рычага 22 подачи мощности. Контактор 22a для подачи мощности подключается к источнику 21 питания постоянного тока через электрический провод 24. Когда аккумулятор B автоматически управляемого транспортного средства 1 заряжается, рычаг 22 подачи мощности выдвигается, с тем чтобы подключать контактор 22a для подачи мощности к контактору 112 для поступления мощности. В этом состоянии, электрическая мощность из источника 21 питания постоянного тока подается в аккумулятор B, за счет чего заряжается аккумулятор B.
[0024] Порт 23 связи обменивается, с портом 113 связи автоматически управляемого транспортного средства 1, данными по зарядной/разрядной емкости (напряжению) аккумулятора B, величине тока (ампер-час; А-ч) ввода и вывода аккумулятора B, другим сигналам команд управления и т.п.
[0025] Модуль 25 управления управляет значением тока и значением напряжения, подаваемыми и применяемыми к аккумулятору B посредством источника 21 питания постоянного тока.
[0026] Автоматически управляемое транспортное средство 1 движется с использованием аккумулятора B в качестве источника мощности приведения в движение. Когда движется автоматически управляемое транспортное средство 1, уменьшается зарядная/разрядная емкость (напряжение) аккумулятора B. Следовательно, автоматически управляемое транспортное средство 1 надлежащим образом заряжается в зарядной станции CS.
[0027] Более конкретно, автоматически управляемое транспортное средство 1 временно останавливается в зарядной станции CS. Затем, данные по зарядной/разрядной емкости аккумулятора B автоматически управляемого транспортного средства 1 передаются в зарядное устройство 2 через порт 113 связи и порт 23 связи. В случае, если зарядная/разрядная емкость (напряжение) аккумулятора B опускается ниже напряжения определения заряда, аккумулятор B заряжается посредством зарядного устройства 2.
[0028] В этом отношении, требуется способ при неизменяющемся постоянном токе и при неизменяющемся постоянном напряжении для того, чтобы заряжать аккумулятор B автоматически управляемого транспортного средства 1 в зарядной станции CS в середине этапа транспортировки. А именно, зарядный ток с неизменяющимся постоянным током подается на ранних стадиях заряда (заряд при неизменяющемся постоянном токе; CC-заряд). Затем, когда напряжение аккумулятора повышается до верхнего предельного напряжения заряда, зарядное напряжение продолжает применяться в течение предварительно определенного времени (заряд при неизменяющемся постоянном напряжении; CV-заряд). Посредством заряда аккумулятора B таким способом может быть выполнен добавочный заряд.
[0029] В случае, если напряжение аккумулятора повышается до верхнего предельного напряжения заряда, заряд может завершаться, и заряд при неизменяющемся постоянном напряжении (CV-заряд) может исключаться. Посредством осуществления этого таким способом, можно дополнительно сокращать время заряда.
[0030] Дополнительно, заряд может завершаться посредством заряда аккумулятора с неизменяющимся постоянным напряжением в течение предварительно установленного времени. Посредством осуществления этого таким способом, напряжение аккумулятора автоматически управляемого транспортного средства 1 повышается посредством времени заряда. Таким образом, аккумулятор надлежащим образом заряжается в течение ограниченного времени.
[0031] Далее поясняются сведения авторов изобретения для того, чтобы упрощать понимание настоящего варианта осуществления.
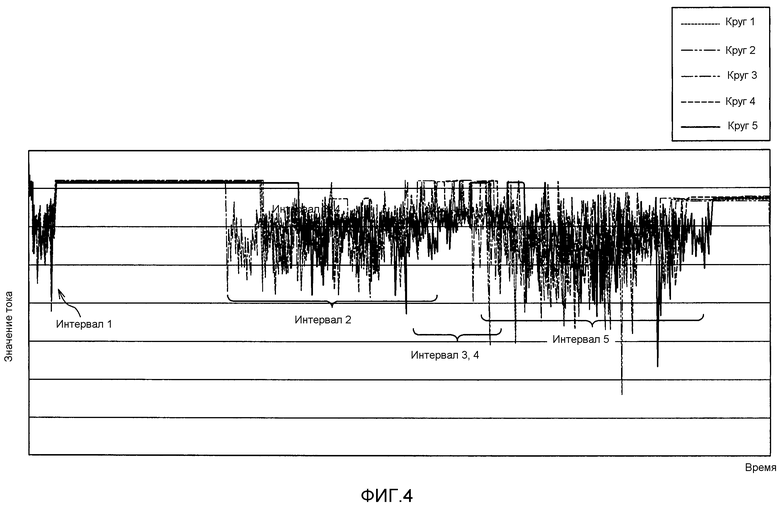
[0032] Фиг. 4 является видом, иллюстрирующим изменение тока, когда автоматически управляемое транспортное средство совершает перемещение по замкнутой траектории по маршруту R движения.
[0033] В этом случае, маршрут R движения настоящего варианта осуществления разделяется на пять интервалов.
[0034] Интервал 1 представляет собой интервал, когда автоматически управляемое транспортное средство останавливается и работает в резервном режиме для установки компонентов на сборочной станции.
[0035] Интервал 2 представляет собой интервал, когда автоматически управляемое транспортное средство движется в область станции выборки и комплектования.
[0036] Каждый из интервалов 3, 4 представляет собой интервал, когда автоматически управляемое транспортное средство доставляет и принимает компоненты в сборочной станции или станции выборки и комплектования.
[0037] Интервал 5 представляет собой интервал, когда автоматически управляемое транспортное средство движется к сборочной станции после выборки и комплектования компонентов.
[0038] Ток флуктуирует в зависимости от интервала движения. Тем не менее, когда автоматически управляемое транспортное средство движется по регулярному маршруту перемещения по замкнутой траектории, предыстория изменений тока становится идентичной.
[0039] Фиг. 5 является видом, иллюстрирующим интегрированную величину (величину потребления) тока, которая выводится для каждого номера круга движения и каждого интервала движения посредством аккумулятора автоматически управляемого транспортного средства.
[0040] Во втором интервале и пятом интервале, величина потребления тока становится большей. В первом интервале, третьем интервале и четвертом интервале, величина потребления тока становится меньшей. Таким образом, хотя существуют различные объемы по величине потребления тока вследствие интервалов движения, автоматически управляемое транспортное средство движется по регулярному маршруту перемещения по замкнутой траектории. Следовательно, величина потребления становится аналогичной с учетом каждого интервала.
[0041] Авторы изобретения фокусируются на том факте, что существует такое свойство в величине потребления тока автоматически управляемого транспортного средства, и полученных сведений касательно того, что существуют некоторые анормальности в автоматически управляемом транспортном средстве в случае, если изменение шаблона потребления тока становится большим, за счет этого осуществляя изобретение. В дальнейшем в этом документе описывается контент конкретного управления.
[0042] Фиг. 6 является блок-схемой последовательности операций способа, выполняемой посредством контроллера автоматически управляемого транспортного средства. Эта обработка многократно выполняется в течение мгновенного временного (например, 10 мс) цикла.
[0043] На этапе S101, контроллер определяет то, завершается или нет движение в N-ном интервале. В этом случае, начальное значение "N" равно единице, и то, двигаться или нет в N-ном интервале, может быть определено посредством считывания маркеров команд, предоставленных на маршруте движения, например, посредством датчика. Контроллер инструктирует переход обработки к этапу S102 в случае, если результат определения является отрицательным. Контроллер инструктирует переход обработки к этапу S103 в случае, если результат определения является утвердительным.
[0044] На этапе S102, контроллер вычисляет интегрированную величину (величину потребления) тока в N-ном интервале в ходе текущего движения.
[0045] На этапе S103, контроллер определяет то, проезжает или нет автоматически управляемое транспортное средство один круг. Это также может быть определено посредством считывания маркеров команд, предоставленных на маршруте движения, например, посредством датчика. Контроллер инструктирует переход обработки к этапу S104 в случае, если результат определения является отрицательным. Контроллер инструктирует переход обработки к этапу S105 в случае, если результат определения является утвердительным.
[0046] На этапе S104, контроллер увеличивает номер N интервала.
[0047] На этапе S105, контроллер подсчитывает число кругов движения.
[0048] На этапе S106, контроллер инициализирует номер N интервала равным единице.
[0049] Фиг. 7 является блок-схемой последовательности операций способа, выполняемой посредством контроллера управляющего оборудования 5. Эта обработка многократно выполняется в течение мгновенного временного (например, 10 мс) цикла.
[0050] На этапе S110, контроллер получает, через зарядное устройство 2, данные интегрированной величины (величины потребления) тока для идентификатора каждого из автоматически управляемых транспортных средств 1 и каждого интервала при заряде каждого из автоматически управляемых транспортных средств 1.
[0051] На этапе S121, контроллер определяет то, возникает или нет большое изменение интегрированной величины (величины потребления) тока в каждом интервале движения каждого из автоматически управляемых транспортных средств 1. А именно, в случае, если нет анормальности в автоматически управляемом транспортном средстве, интегрированная величина (величина потребления) тока для каждого интервала движения на каждом круге является почти идентичной, как показано на фиг. 5. С другой стороны, например, в случае, если следующее условие (1) удовлетворяется относительно трех интервалов или более из пяти интервалов, или следующее условие (2) удовлетворяется относительно двух интервалов или более из пяти интервалов, определяется то, что возникает большое изменение.
[0052] (1) Интегрированная величина (величина потребления) тока в каждом интервале перемещения по замкнутой траектории в этот раз увеличивается в 1,5 (полтора) раза или более относительно интегрированной величины (величины потребления) тока в каждом интервале перемещения по замкнутой траектории в предыдущий раз.
[0053] (2) Интегрированная величина (величина потребления) тока в каждом интервале перемещения по замкнутой траектории в этот раз увеличивается в 2,0 (два) раза или более относительно интегрированной величины (величины потребления) тока в каждом интервале перемещения по замкнутой траектории в предыдущий раз.
[0054] В этом отношении, условия (1) и (2), описанные выше, являются просто одним примером. Например, в случае, если интегрированная величина тока не только увеличивается, но также и снижается (например, в случае, если величина в этот раз снижается в 0,75 раза или меньше относительно величины в предыдущий раз, либо в случае, если величина в этот раз снижается в 0,5 раза или меньше относительно величины в предыдущий раз), также может быть определено, что возникает большое изменение.
[0055] На этапе S130, контроллер выдает в управляющее оборудование 5 предупреждение. Это предупреждение может отображаться на дисплее управляющего оборудования 5, либо может подсвечиваться лампа.
[0056] Согласно настоящему варианту осуществления, анормальность автоматически управляемого транспортного средства обнаруживается на основе изменения шаблона потребления тока автоматически управляемого транспортного средства. Здесь, "анормальность" означает такое состояние, что величина потребления аккумулятора значительно изменяется каждый раз, когда автоматически управляемое транспортное средство совершает перемещение по замкнутой траектории на маршруте движения, и вызывается посредством быстрого износа шин, ухудшения характеристик вследствие нагрева аккумулятора и т.п. В случае, если такая анормальность не может быть обнаружена, может возникать анормальная остановка (выключение) автоматически управляемого транспортного средства. Тем не менее, согласно настоящему варианту осуществления, можно определять анормальность заранее до того, как возникает такая ситуация. Дополнительно, поскольку предупреждение выдается, когда определяется анормальность, можно не допускать анормальной остановки (или выключения) автоматически управляемого транспортного средства. Дополнительно, согласно настоящему варианту осуществления, определяется то, возникает или нет большое изменение интегрированной величины (величины потребления) тока в каждом интервале движения каждого автоматически управляемого транспортного средства 1. Степень износа шин и/или степень ухудшения характеристик аккумулятора отличаются друг от друга в соответствующем автоматически управляемом транспортном средстве. А именно, существует индивидуальное различие. Даже в таком случае, согласно настоящему варианту осуществления, поскольку определяется на основе интегрированной величины (величины потребления) тока каждого автоматически управляемого транспортного средства, можно выполнять определение анормальности точно.
[0057] Дополнительно, условия (1) и (2), описанные выше, являются просто одним примером. Например, интегрированная величина тока может сравниваться с интегрированной величиной среднего тока (средней величиной потребления) в каждом интервале перемещения по замкнутой траектории до предыдущего раза. Посредством осуществления этого таким способом, также можно обнаруживать анормальность случая, в котором интегрированная величина (величина потребления) тока продолжает увеличиваться или снижаться постепенно.
[0058] ВТОРОЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ
Фиг. 8 является блок-схемой последовательности операций способа, выполняемой посредством контроллера управляющего оборудования 5 согласно второму варианту осуществления. Эта обработка многократно выполняется в течение мгновенного временного (например, 10 мс) цикла.
[0059] В этом отношении, идентичная ссылочная позиция применяется к части, которая выполняет функцию, аналогичную функции, описанной выше, и повторное пояснение опускается надлежащим образом.
[0060] На этапе S122, контроллер определяет то, возникает или нет большое изменение интегрированной величины (величины потребления) тока в каждом интервале движения каждого автоматически управляемого транспортного средства 1, которое является целью определения анормальности, посредством сравнения с текущей интегрированной величиной (величиной потребления) в каждом интервале движения каждого автоматически управляемого транспортного средства 1, имеющего различный идентификатор. Что касается автоматически управляемого транспортного средства, имеющего различный идентификатор, например, имеется автоматически управляемое транспортное средство, которое движется по маршруту перемещения по замкнутой траектории впереди. Дополнительно, интегрированная величина (величина потребления) тока может сравниваться со средним значением интегрированной величины (величины потребления) тока автоматически управляемого транспортного средства, имеющего различный идентификатор. Затем, как в первом варианте осуществления, определяется то, что возникает большое изменение, в случае, если существует три интервала или более, в которых интегрированная величина тока увеличивается в 1,5 раза или более, из пяти интервалов, либо в случае, если существует два интервала или более, в которых интегрированная величина тока увеличивается в 2,0 раза или более, из пяти интервалов.
[0061] Дополнительно, может быть определено, что возникает большое изменение в случае, если интегрированная величина (величина потребления) тока не только увеличивается, аналогично первому варианту осуществления, но также и снижается.
[0062] В этом отношении, поскольку этап S110 и этап S130 являются аналогичными этапу S110 и этапу S130 в первом варианте осуществления, их подробное пояснение опускается.
[0063] Согласно настоящему варианту осуществления, анормальность конкретного автоматически управляемого транспортного средства обнаруживается, когда существует большое изменение шаблона потребления тока конкретного автоматически управляемого транспортного средства посредством сравнения с шаблоном потребления тока другого автоматически управляемого транспортного средства. Поскольку это осуществляется таким способом, можно точно определять анормальность вследствие снижения производительности конкретного автоматически управляемого транспортного средства.
[0064] Дополнительно, посредством обнаружения анормальности конкретного автоматически управляемого транспортного средства, когда существует большое изменение шаблона потребления тока автоматически управляемого транспортного средства посредством сравнения со средним шаблоном потребления тока другой группы автоматически управляемых транспортных средств, можно точно определять анормальность вследствие дополнительного снижения производительности конкретного автоматически управляемого транспортного средства.
[0065] Как описано выше, система (S) для обнаружения анормальности автоматически управляемого транспортного средства (1), которое движется по маршруту перемещения по замкнутой траектории, включает в себя: модуль записи предыстории для записи предыстории изменений тока аккумулятора автоматически управляемого транспортного средства (1) относительно каждого перемещения по замкнутой траектории (этап S102); и модуль определения анормальности для определения присутствия или отсутствия анормальности автоматически управляемого транспортного средства (1) на основе предыстории изменений тока аккумулятора, записываемой для каждого перемещения по замкнутой траектории (этапы S121, 122). В случае, если анормальность не может быть обнаружена, может возникать анормальная остановка (выключение) автоматически управляемого транспортного средства. Тем не менее, в вариантах осуществления, описанных выше, можно определять анормальность заранее до того, как возникает такая ситуация. Дополнительно, определяется то, возникает или нет большое изменение интегрированной величины (величины потребления) тока, записываемой для каждого перемещения по замкнутой траектории каждого автоматически управляемого транспортного средства. Каждое автоматически управляемое транспортное средство имеет различную степень износа шин и различную степень ухудшения характеристик аккумулятора. А именно, существует индивидуальное различие. Даже в этом случае, поскольку определяется на основе интегрированной величины (величины потребления) тока каждого автоматически управляемого транспортного средства, можно выполнять определение анормальности точно.
[0066] Как описано выше, хотя пояснены варианты осуществления настоящего изобретения, вышеописанные варианты осуществления просто иллюстрируют часть примеров варианта применения настоящего изобретения, и это не означает, что объем настоящего изобретения ограничивается конкретной конфигурацией каждого из вариантов осуществления, описанных выше.
[0067] Например, конкретное условие определения того, возникает или нет большое изменение, является всего одним примером, и это может определяться надлежащим образом.
[0068] Дополнительно, варианты осуществления, описанные выше, могут надлежащим образом комбинироваться между собой. А именно, этап S121 в первом варианте осуществления и этап S122 во втором варианте осуществления включаются в одну блок-схему последовательности операций способа для определения. Даже если устанавливается любой один из них, предупреждение может выдаваться на этапе S130.
[0069] В этом отношении, варианты осуществления, описанные выше, могут надлежащим образом комбинироваться друг с другом.
[0070] Настоящая заявка испрашивает приоритет заявки на патент Японии №2012-171714, поданной в Патентное бюро Японии 2 августа 2012 года, все содержимое которой явно включено в данный документ путем ссылки.
Изобретение относится к электрическим тяговым системам транспортных средств с питанием от собственных источников энергоснабжения. Система содержит модуль записи предыстории и модуль определения анормальности. Модуль записи предыстории выполнен с возможностью записи изменений тока аккумулятора автоматически управляемого транспортного средства относительно каждого перемещения по замкнутой траектории. Модуль определения анормальности выполнен с возможностью определения присутствия или отсутствия анормальности автоматического управляемого транспортного средства на основе предыстории изменений тока аккумулятора, записываемой для каждого перемещения по замкнутой траектории. 5 з.п. ф-лы, 8 ил.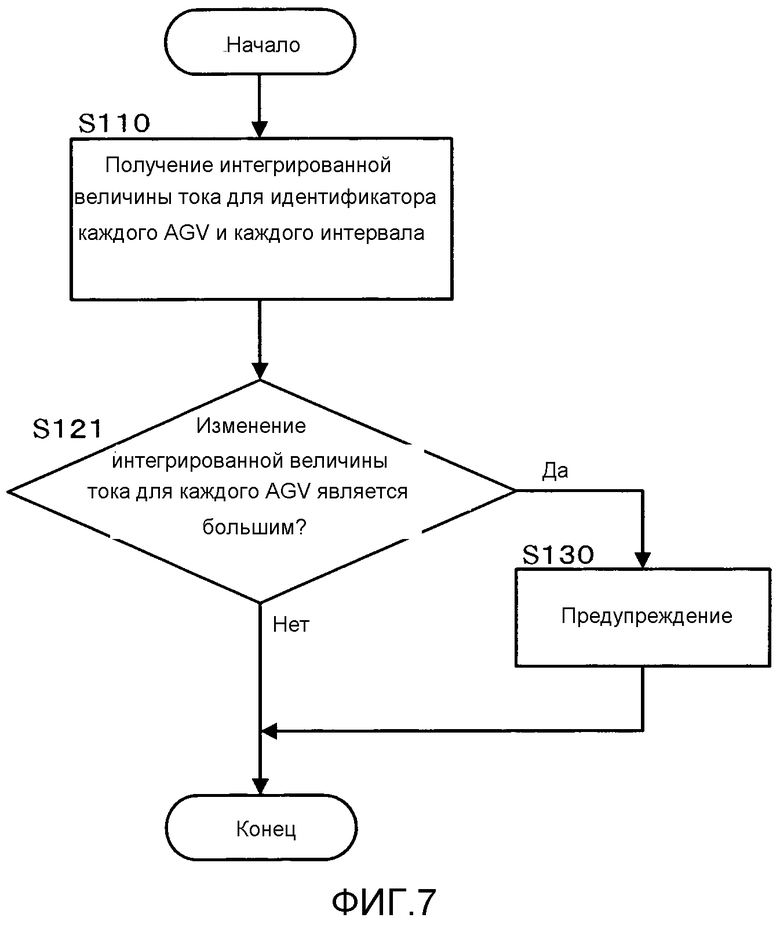
1. Система обнаружения анормальности для автоматически управляемого транспортного средства, причем система обнаруживает анормальность автоматически управляемого транспортного средства, которое движется по маршруту перемещения по замкнутой траектории, при этом система обнаружения анормальности содержит:
- модуль записи предыстории для записи предыстории изменений тока аккумулятора автоматически управляемого транспортного средства относительно каждого перемещения по замкнутой траектории; и
- модуль определения анормальности для определения присутствия или отсутствия анормальности автоматически управляемого транспортного средства на основе предыстории изменений тока аккумулятора, записываемой для каждого перемещения по замкнутой траектории.
2. Система обнаружения анормальности для автоматически управляемого транспортного средства по п. 1,
в которой модуль определения анормальности определяет присутствие или отсутствие анормальности автоматически управляемого транспортного средства посредством сравнения предыстории изменений перемещения по замкнутой траектории в этот раз автоматически управляемого транспортного средства с предысторией изменений перемещения по замкнутой траектории в предыдущий раз.
3. Система обнаружения анормальности для автоматически управляемого транспортного средства по п. 1,
в которой модуль определения анормальности определяет присутствие или отсутствие анормальности автоматически управляемого транспортного средства посредством сравнения предыстории изменений перемещения по замкнутой траектории в этот раз автоматически управляемого транспортного средства со средней предысторией изменений перемещения по замкнутой траектории до предыдущего раза.
4. Система обнаружения анормальности для автоматически управляемого транспортного средства по любому из пп. 1-3,
в которой присутствуют множественные автоматически управляемые транспортные средства, и
при этом модуль определения анормальности определяет присутствие или отсутствие анормальности автоматически управляемого транспортного средства, которое совершает перемещение по замкнутой траектории в этот раз, посредством сравнения предыстории изменений автоматически управляемого транспортного средства, которое совершает перемещение по замкнутой траектории в этот раз, с предысторией изменений другого автоматически управляемого транспортного средства.
5. Система обнаружения анормальности для автоматически управляемого транспортного средства по любому из пп. 1-3,
в которой присутствуют множественные автоматически управляемые транспортные средства, и
при этом модуль определения анормальности определяет присутствие или отсутствие анормальности автоматически управляемого транспортного средства, которое совершает перемещение по замкнутой траектории в этот раз, посредством сравнения предыстории изменений автоматически управляемого транспортного средства, которое совершает перемещение по замкнутой траектории в этот раз, со средней предысторией изменений другой группы автоматически управляемых транспортных средств.
6. Система обнаружения анормальности для автоматически управляемого транспортного средства по любому из пп. 1-3,
в которой предыстория изменений тока аккумулятора представляет собой предысторию изменения интегрированной величины тока в интервале движения каждого перемещения по замкнутой траектории автоматически управляемого транспортного средства.
| JP 4453695 B2, 21.04.2010 | |||
| JP 2006004012 A, 05.01.2006 | |||
| WO 2012054864 A2, 26.04.2012 | |||
| Устройство для контроля степени заряда аккумуляторной батареи | 1985 |
|
SU1314272A1 |
| Способ и приспособление для испытания смазочных материалов на поглощение пыли | 1938 |
|
SU57970A1 |

