ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
Эта заявка притязает на преимущества предварительных патентных заявок: США №61/185,887, поданной 10 июня 2009 года, и No.61/185,887 поданной 10 июня 2009 года, которые во всей их полноте включены в эту заявку в качестве ссылки.
ПРЕДПОСЫЛКИ ДЛЯ СОЗДАНИЯ НАСТОЯЩЕГО ИЗОБРЕТЕНИЯ
В настоящее время в ядерных реакторах с водяным охлаждением (PWR) и других видах ядерных реакторов используются подвижные управляющие стержни для управления ядерной реакцией.
Управляющие стержни содержат материал для поглощения нейтронов и расположены так, чтобы их можно было ввести в ядро реактора. В общем случае управляющие стержни вводятся в ядро реактора, и основное количество нейтронов поглощается ими и основная ядерная реакция замедляется. Точный контроль степени ввода и точное измерение степени ввода очень важны для точного управления реактивностью. Для такого управления используются устройства управления управляющими стержнями (CRDM).
В экстренных ситуациях управляющие стержни могут быть полностью введены в ядро реактора для того, чтобы быстро погасить ядерную реакцию. В так называемом «быстром выключении реактора» полезно иметь альтернативный быстрый механизм для введения управляющих стержней в ядро реактора. Дополнительно или в качестве альтернативы используются специальные управляющие стержни, которые могут быть полностью введены в ядро реактора (тем самым «выключив» ядерную реакцию) или полностью изъяты из ядра реактора (тем самым возобновив работу реактора). Такие стержни иногда называют «защитными», причем непрерывно регулируемые управляющие стержни иногда называют «серыми стержнями».
Учитывая сказанное, известны конструкции устройства управления управляющими стержнями, использующие соединительный стержень, который сцеплен с помощью отдельного механизма в виде вращающейся гайки. В обычном режиме такой механизм прижат к соединительному стержню с помощью положительной магнитной силы, действующей на подмагниченные пружины. Путем вращения гайки соединительный стержень и, следовательно, присоединенные к ней управляющие стержни передвигаются по направлению к ядру реактора или по направлению от него. При быстром выключении реактора ток прерывает действие магнитной силы, подмагниченные пружины разжимают отдельные вращающиеся гайки и «серые стержни» вызывают быстрое отключение реактора. Пример такого устройства раскрыт в следующем источнике информации: Domingo Ricardo Giorsetti, "Analysis of the Technological Differences Between Stationary & Maritime Nuclear Power Plants", M.S.N.E. Thesis, Massachusetts Institute of Technology (MIT) Department of Nuclear Engineering (1977), который включен в заявку в качестве ссылки.
Для встроенных ядерных реакторов с водяным охлаждением (PWR) известно использование внешнего CRDM и объединение его вместе с управляющими стержнями внутри корпуса давления для их удобного прохождения. Для уменьшения величины прохождения было предложено встроить CRDM внутрь корпуса давления. Такая конструкция описана в следующем источнике информации: Ishizaka et al., "Development of a Built-in Type Control Rod Drive Mechanism (CRDM) For Advanced Marine Reactor X (MRX)", Proceedings of the International Conference on Design and Safety of Advanced Nuclear Power Reactors (ANP '92), October 25-29, 1992 (Tokyo Japan) published by the Atomic Energy Society of Japan in October 1992,), который включен в заявку в качестве ссылки.
Существующие конструкции CRDM имеют определенные недостатки. Недостатки проявляются сильнее при внутренней конструкции CRDM, в которой используется электромеханическое оборудование в условиях высокого давления или высокой температуры, внутри корпуса давления. Расположение CRDM внутри корпуса давления также вызывает его сложные структурные изменения.
Отдельные вращающиеся гайки создают сложную связь между направляющим стержнем, которая плохо влияет на точный ввод «серых стержней» во время обычной работы реактора. Отсоединение вращающейся гайки от направляющего стержня достаточно сложно и очевидно не происходит немедленно после восстановления контакта, вызывая смещение ее местоположения после быстрого выключения реактора. Быстрая остановка направляющего стержня также может вызвать необратимое повреждение его структурной целостности. Также износ при использовании в течение длительного времени является недостатком отдельных вращающихся гаек.
Следующий важный вопрос - это надежность. Быстрая остановка стержней является критичной для безопасности и должна происходить надежно, даже в случае потери охлаждающей жидкости (LОСА) или в других нештатных режимах, которые могут вызвать прекращение питание электрической энергией, в случае больших изменений давления и тому подобное.
Детекторы положения управляющего стержня также являются достаточно сложным устройством. В некоторых системах используются внешние детекторы положения, которые требуют прохождения вдоль стенки корпуса давления. Для внутреннего CRDM в ядерном реакторе MRX типа был разработан сложный детектор положения, в котором передатчик генерирует импульсы, которые проходят по магниторезистивному волноводу, и измеряет напряженность магнитного поля для определения положения стержня. Обычно внутренний детектор положения, работающий на основе измерения электрического сопротивления, предрасположен к ошибкам измерений в связи с изменением сопротивления материала вследствие температурных изменений.
ОПИСАНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
В одном варианте осуществления изобретения, устройство управления стержнями в ядерном реакторе включает:
- управляющий стержень, предназначенный для введения в активную зону ядерного реактора для поглощения нейтронов;
- соединительный стержень, соединенный с управляющим стержнем;
- управляющий механизм, включающий направляющий винт, сцепленный с управляемой двигателем муфтой, причем вращение муфты вызывает линейное поступательное движение направляющего винта;
- фиксатор для быстрого соединения и перемещения соединительного стержня вместе с направляющим винтом, причем открытие фиксатора для расцепления соединительного стержня и направляющего стержня вызывается потерей или пропаданием электрической энергии.
В другом варианте осуществления изобретения, способ управления стержнями в ядерном реакторе включает:
- линейное перемещение управляющего стержня с помощью направляющего винта;
- расцепление в случае быстрой остановки реактора управляющего стержня от направляющего винта, причем управляющий стержень быстро отключается, а направляющий винт не останавливается.
В другом варианте осуществления изобретения, ядерный реактор включает:
- активную зону;
- корпус давления, включающий нижнюю секцию корпуса давления с активной зоной, верхнюю секцию корпуса давления, расположенную над активной зоной и над нижней секцией корпуса давления, а также средний фланец, расположенный над активной зоной и между нижней секцией корпуса давления и верхней секцией корпуса давления;
- внутреннее устройство управления стержнями (CDRM), закрепленное средним фланцем.
В другом варианте осуществления изобретения, устройство управления стержнями (CDRM) для использования в ядерном реакторе включает:
- соединительный стержень, соединенный с по меньшей мере одним управляющим стержнем;
- направляющий винт;
- устройство управления, предназначенное для линейного поступательного перемещения направляющего винта;
- электромагнитные катушки;
- фиксирующее устройство, которое сцепляет стержень с направляющим винтом, реагирует на возбуждение электромагнитных катушек и расцепляет соединительный стержень от направляющего винта при снижении возбуждения электромагнитных катушек.
КРАТКОЕ ОПИСАНИЕ СОПРОВОДИТЕЛЬНЫХ ЧЕРТЕЖЕЙ
Изобретение может иметь различные варианты осуществления конкретных деталей и механизмов, а также различных технологических операций и деталей технологических операций. Чертежи являются способом иллюстрации (пояснения) и не должны рассматриваться как ограничение рассматриваемого изобретения.
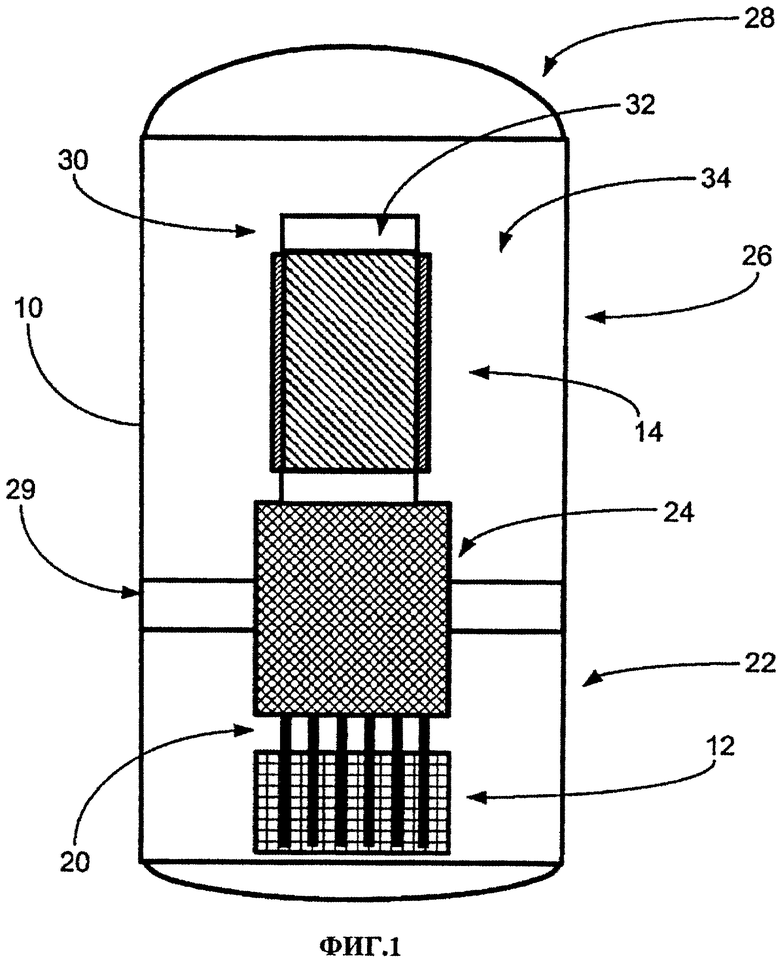
Фигура 1 схематично показывает корпус ядерного реактора с водяным охлаждением (PWR).
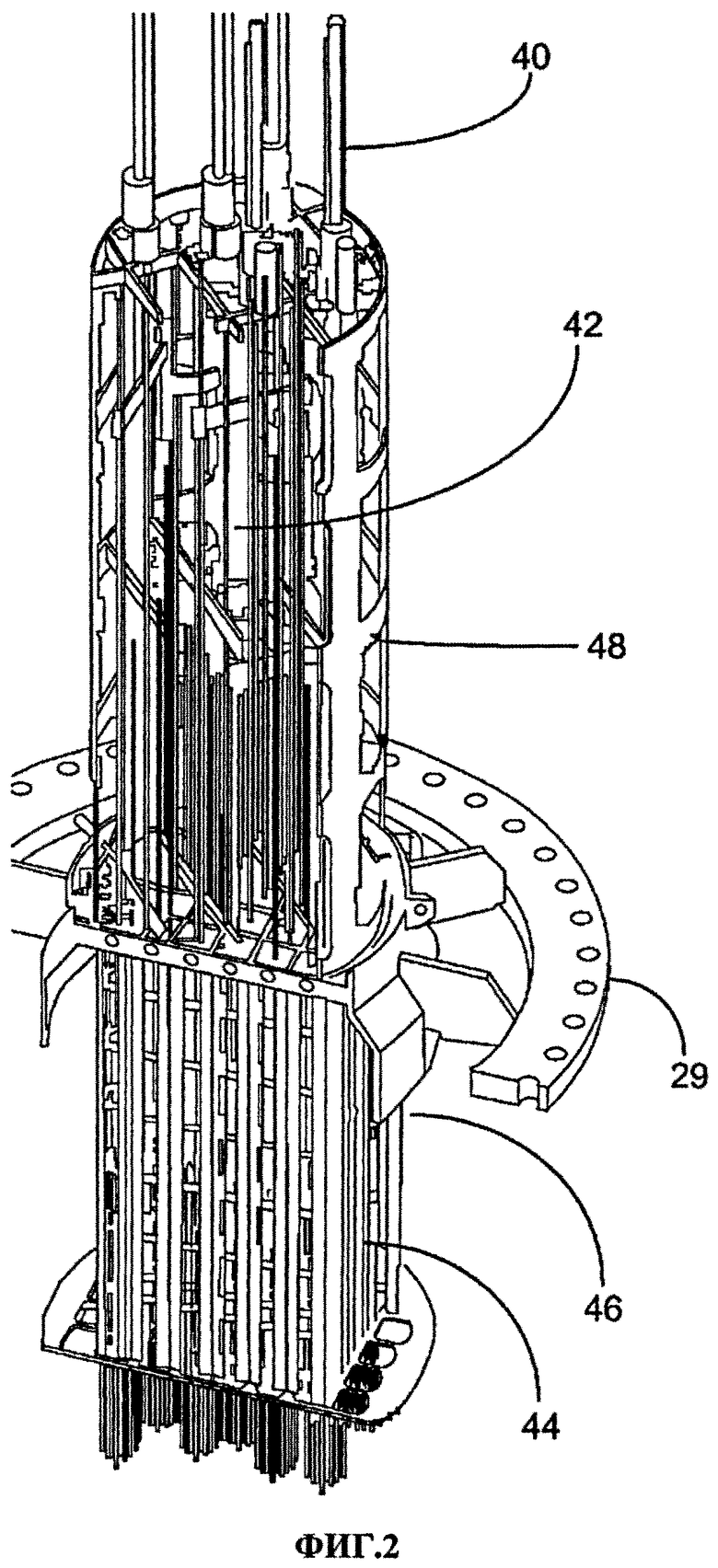
Фигура 2 схематично показывает верхний внутренний отдел иллюстрируемого корпуса ядерного реактора.
Фигуры 3-5 схематично показывают вид системы отключения управляющих стержней с использованием гидравлического подъемного устройства.
Фигуры 6-15 схематично показывают вид системы управления стержнями с функцией электромагнитной серого стержня и магнитной фиксирующей системы с функцией быстрой остановки реактора.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ НАСТОЯЩЕГО ИЗОБРЕТЕНИЯ
Как следует из фигуры 1, на ней схематично изображен корпус ядерного реактора с водяным охлаждением (PWR). Как изображено, первичный корпус 10 содержит ядро реактора 12, внутренние спиральные парогенераторы 14 и внутренние управляющие стержни 20. Изображенный корпус реактора включает четыре основные части, а именно: 1) малый корпус 22, 2) верхние внутрикорпусные устройства 24, 3) головную часть корпуса 28. Средний фланец 29 расположен между нижней секцией 22 и верхней секцией 26 корпуса. Иные конфигурации корпуса также могут быть рассмотрены. Следует понимать, что фигура 1 схематична и не показывает такие элементы корпуса, как внутренности корпуса давления для перетекания вторичного охлаждающего вещества внутрь и наружу парогенераторов, также фигура 1 не показывает электрические детали электрических элементов и так далее.
Нижний корпус 22, изображенный на фигуре 1 корпуса ядерного реактора, содержит ядро реактора 12, которое может иметь по существу любую подходящую конфигурацию. Одна из подходящих конфигураций включает ядро из нержавеющей стали, образующее структуру, которая содержит топливные сборки, которые могут заменяться для дозаправки ядерного реактора и которые закрепляются с помощью нижнего корпуса. Изображенный верхний корпус 26 закрывает парогенераторы 14 в изображенном ядерном реакторе с водяным охлаждением, который имеет вид внутреннего парогенератора (иногда называемый интегральным PWR). Парогенератор 14 схематично изображен на фигуре 1. Цилиндрическая внутренняя оболочка верхнего кожуха 30 отделяет отдел центрального подъемного устройства 32 от кольцевого вертикального отдела 34, в котором расположены спиральные парогенераторы 14. Изображенный парогенератор 14 имеет вид спиралевидной катушки, хотя может иметь и другой внешний вид. Первичное охлаждающее вещество протекает вдоль внешней поверхности труб парогенератора 14, а вторичное охлаждающее вещество протекает внутри труб парогенератора 14. При обычном типе циркуляции первичное охлаждающее вещество нагревается от ядра ядерного реактора 12 и протекает через отдел центрального подъемного устройства 32 на выход оболочки внешнего кожуха 30, после чего первичная охлаждающая жидкость протекает вниз через нижний встречный отдел 34 и вдоль парогенераторов 14. Такая первичная охлаждающая жидкость может регулироваться естественной конвекцией, внутренними или внешними насосами первичной охлаждающей жидкости (не показаны), или комбинацией насоса и естественной конвекции. Хотя на фигурах изображен реактор PWR типа, то же самое подразумевается для сосуда давления с внешним парогенератором (не показан), в этом случае проникновение в корпус давления способствует переносу охлаждающей жидкости по направлению к внешнему парогенератору и от него. Изображенная головная часть корпуса 28 является отдельной деталью. Также подразумевается, что головная часть корпуса встроена в верхний корпус 26, в этом случае парогенератор 14 и внешний кожух 30 дополнительно опираются на панели внутри головной части корпуса.
Изображенный вариант осуществления изобретения ядерного реактора с водяным охлаждением включает внутренние водяные генераторы 14, которые могут иметь различные геометрические формы, в частности, такие как цилиндрическая, вертикальная, наклонная и другие. С целью дублирования в общем случае выгодно иметь более одного парогенератора, трубы которого прокладываются внутри нижнего встречного отдела 34 для достижения тепловой равномерности, однако предполагается, что можно использовать и только один парогенератор. Хотя изображенные на фигурах парогенераторы 14 расположены или закрыты непосредственно внешним кожухом 30, в общем случае парогенераторы могут занимать существенный объем отдела опускной камеры 34, и в некоторых вариантах осуществления парогенераторы могут существенно занимать кольцеобразное пространство между внешней поверхностью внешнего кожуха 30 и внутренней поверхностью корпуса давления 10. Также предполагается, что внутренние парогенераторы или их части могут быть расположены полностью или частично в отделе подъемного устройства 32 над внешним кожухом 30, либо внутри корпуса давления 10. С другой стороны, в некоторых вариантах осуществления ядерный реактор с водяным охлаждением может не иметь встроенные парогенераторы, то есть в некоторых вариантах осуществления изображенные внутренние парогенераторы могут отсутствовать, так как есть один и более внешних парогенераторов. Таким образом, изображенный ядерный реактор с водяным охлаждением приведен в качестве примера и в качестве других вариантов осуществления это может быть кипящий ядерный реактор (BWR) и иной, с использованием как внутренних, так и внешних парогенераторов.
На фигуре 2 детально изображен внутрикорпусной отдел 24. Изображенный внешний вид внутрикорпусного отдела 24 предусматривает размещение механизма управления стержнем 40, 42 и направляющие 44 для управляющего стержня, а также устройство, через которое поступают энергия для механизма управления стержнем, а также управляющие сигналы. Это позволяет независимо от механизма управления стержнем или других элементов заменять верхний корпус 26 и встроенный парогенератор 14. Однако также предусмотрен более цельный внешний вид, предусматривающий установку CRDM и встроенного парогенератора в общем отделе.
На фигуре 2 изображен вариант осуществления верхнего внутрикорпусного отдела 24, включающий верхнюю внутрикорпусную корзину 46, опорный элемент 48 CRDM, направляющие 44 для управляющего стержня и механизмы управления стержнем 40, 42. Верхняя внутрикорпусная корзина 46 представляет собой соответствующим образом сваренную структуру, которая включает средний фланец 29 и опорный элемент для направляющих 44 для управляющего стержня. В одном из вариантов осуществления, направляющие 44 для управляющего стержня представляют собой сварную конструкцию из нержавеющей стали марки 304L, привинченную к своему месту, средний фланец 29 представляет собой штамповку из углеродистой стали марки SA508 Gr 4N С12, остальные детали выполнены из нержавеющей стали марки 304L. Опорный элемент CRDM состоит из опорных решеток для механизмов управления стержнем 40, 42 и направляющих для внутриреакторных приборов. Все детали выполнены из нержавеющей стали марки 304L. Опорный элемент CRDM привинчен к верхней внутрикорпусной корзине 46. Ясно, что описаны иллюстративные материалы и конструкции и что возможны другие варианты конструкций и/или совместимых с ядерным реактором материалов для осуществления данного изобретения.
На фигуре 2 в качестве примера изображены два типа механизмов для управления стержнями 40, 42: гидравлический тип 42 механизма управления стержнем, который осуществляет отключение стержней, которые либо полностью изъяты, либо полностью введены в ядро реактора; а также электрический тип 40 механизма для управления стержнями, который управляет серыми стержням, которые вводятся в различном количестве на протяжении жизненного цикла ядерного реактора для управления скоростью ядерной реакции во время нормальной работы реактора. Серые стержни также предназначены для быстрого выключения реактора, путем быстрого введения в ядро реактора, во время чрезвычайных ситуаций. В другом варианте осуществления предусмотрено полностью исключить стержни для остановки реактора, в этом случае «серые стержни» также предусматривают операцию остановки.
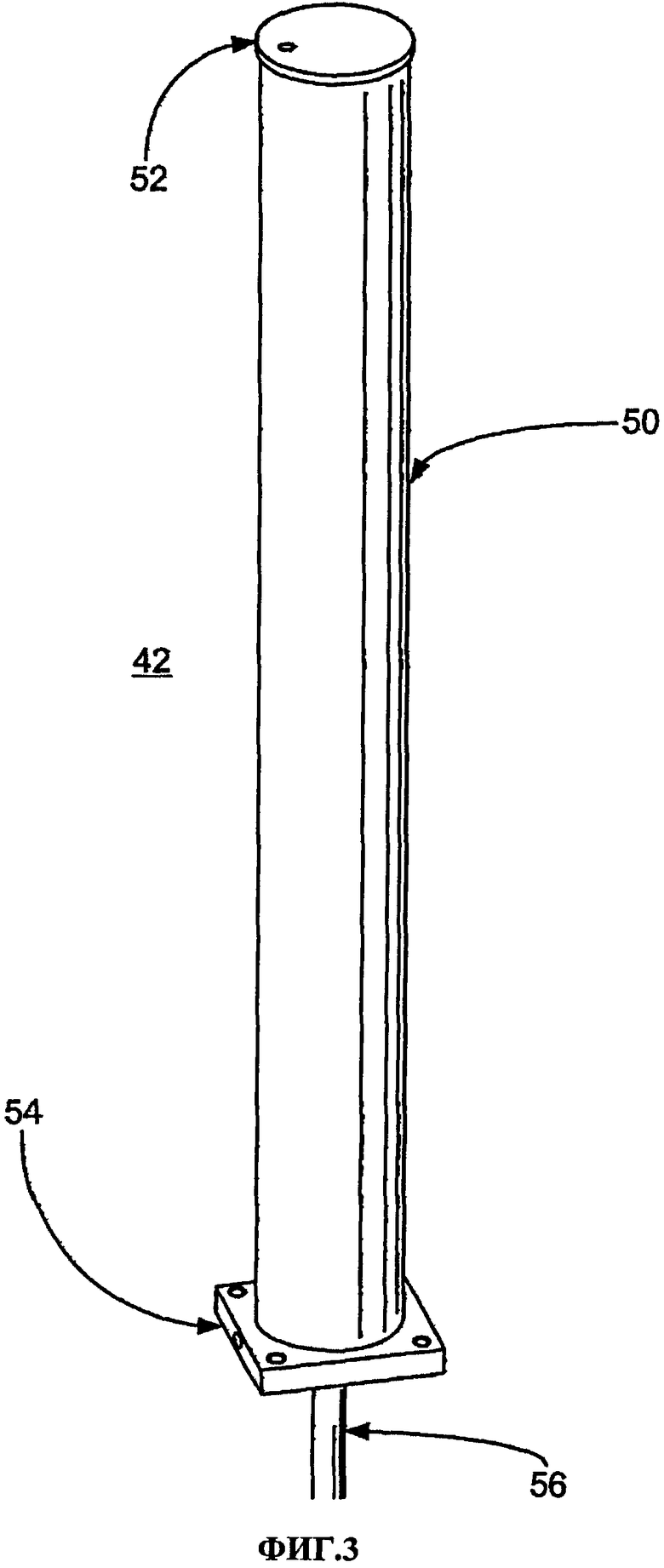
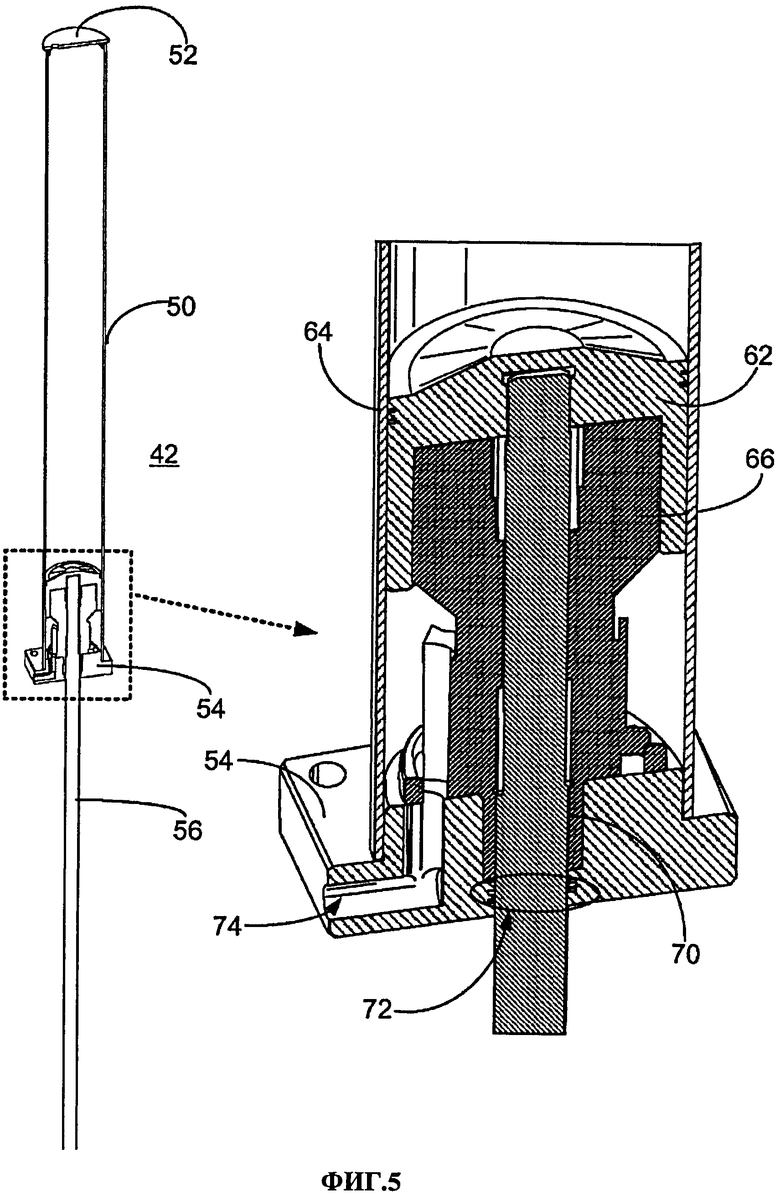
На фигуре 2 и далее на фигурах 3-5 изображены детали выполнения стержней для остановки реактора. Стержни для остановки специальным образом размещены в группы, закрепленные в сети или тому подобное, которые работают как единая группа, и все стержни могут двигаться с помощью одного механизма 42. Фигуры 3-5 показывают только механизм 42, а сети и отдельные стержни не показаны. Эта конфигурация указывает на то, что стержни для отключения реактора работают в режиме включено/выключено, так что все стержни полностью введены в ядро реактора 12 для его остановки, либо все стержни полностью изъяты из ядра реактора 12 для обеспечения его нормальной работы.
На фигуре 3 изображен механизм остановки стержня 42, включающий: цилиндрический корпус 50, цилиндрическую крышку 52, цилиндрическую опорную плиту 54 и соединительный стержень 54, обеспечивающий соединение с решеткой остановки стержня (не показана). Изображенный на фигурах 3-5 механизм остановки стержней 42 приводится в действие гидравлически, с использованием оставшейся очищенной охлаждающей реактор жидкости, поступающей из нагнетающих под высоким давлением насосов, при температуре примерно 500 градусов по Фаренгейту (260 градусов по Цельсию) и давлении 1600 psi для удерживания группы стержней вне зоны ядра реактора 12.
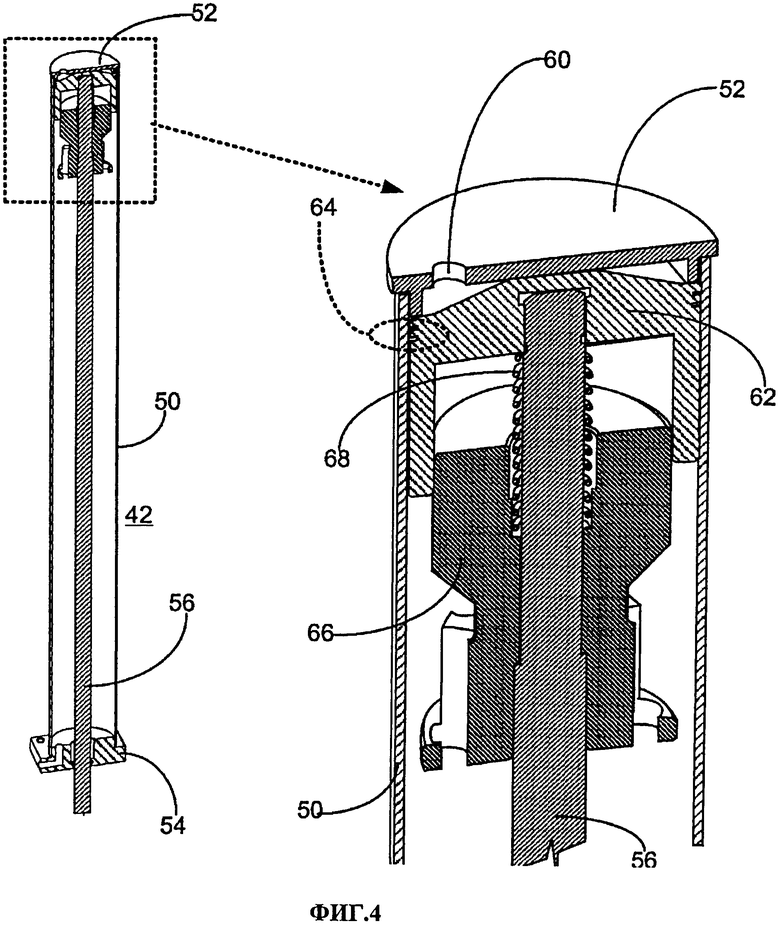
На фигуре 4 изображен частный вид поршня со стержнем в извлеченном состоянии. На увеличенной части фигуры 4 показаны вентиляционный канал 60 цилиндрической крышки 52, вместе с подъемным механизмом поршня 62, поршневые кольца 64 (которые выполнены из металла в некоторых вариантах осуществления), амортизатор быстрой остановки 66, буферная пружина 68. Показанное на фигуре 4 извлеченное состояние соответствует цилиндру управляющего механизма 42 в закрытом герметизированном состоянии.
На фигуре 5 изображен частный вид поршня со стержнем во введенном состоянии. На увеличенной части фигуры 5 показаны подъемный механизм поршня, поршневые кольца 64, амортизатор быстрой остановки или поршень амортизатора быстрой остановки 66, направляющая стержневая втулка 70, уплотнительные стержневые кольца 72 (которые выполнены из металла в некоторых вариантах осуществления). Цилиндрическая опорная пластина 54 видна на увеличенной части фигуры, включая канал давления и входной канал 74. Показанное на фигуре 5 введенное состояние соответствует цилиндру управляющего механизма 42 в разгерметизированном состоянии.
В некоторых вариантах осуществления допускается просачивание охлаждающей жидкости мимо поршня и уплотнение вала 64, 72 и становится частью остатков возвращающихся в корпус реактора 10. Цилиндр останавливающего стержень механизма 42 расположен над ядром реактора 12. Гидравлическая линия (не показана) для приведения в действие цилиндра 42 проложена через фланец 29, и приборные линии проложены через герметизированные трубы к общим соединителям, которые также дополнительно используются для механизмов серого стержня. Удлинительные стержни, которые соединяют сети управляющих стержней с решеткой останавливающего стержня, могут быть дополнительно предназначены для того, чтобы скользить через решетку таким образом, чтобы не один отдельный пучок не препятствовал опусканию других управляющих стержней. Дополнительно, удлинительные стержни предназначены для расцепления от сети управляющих стержней таким образом, чтобы останавливающие стержни оставались в ядре реактора при извлечении внутрикорпусного отдела 24. Высвобождение и сцепление выполняется с использованием дистанционного управления во время операций по дозаправке.
Во время обычной работы реактора останавливающие стержни подвешены полностью вне зоны ядра реактора (то есть находятся в изъятом состоянии) путем герметизации гидравлического цилиндра 42 останавливающего стержня. Например, в одном из вариантов осуществления очищенная охлаждающая реактор жидкость поступает из нагнетающих под высоким давлением насосов при температуре примерно 500 градусов по Фаренгейту (260 градусов по Цельсию) и давлении 1600 psi к верхней части подъемного устройства поршня 626 через входной канал 74 основания цилиндра 54. В этом примере, жидкость присутствует в цилиндре 50 над поршнем 60, поступая из корпуса реактора 10 через вентиляционный канал 60 крышки цилиндра, и, следовательно, в корпусе реактора температура составляет 600 градусов по Фаренгейту (315 градусов по Цельсию) и давлении 1500 psi, приводя фактически к разнице давления 100 psi на концах поршня 62. Размер поршня выбран таким образом, что достигаемая разница давления достаточна для поддержки необходимой нагрузки останавливающих стержней и поддержки сетей и других связанных компонентов и подъема группы останавливающих стержней через цилиндр к верхнему ограничителю поршня 62.
В случае быстрой остановки герметичного корпуса, группа останавливающих стержней внезапно разблокируется путем прекращения подачи охлаждающей жидкости в верхнюю часть подъемного устройства поршня 62, приводя давление в питающей линии к уровню атмосферного. В вышеупомянутом примере, в корпусе давления верхнего участка подъемного устройства поршня 62, первоначально образуется разница давления 1500 psi, действующего на подъемное устройство поршня, которое, действуя совместно с силой тяжести, является достаточным для передвижения деталей, включая подъемное устройство поршня 62, амортизатор быстрой остановки 66, буферную пружину 68, соединительный стержень 56, решетку остановочного стержня (не показана) сверху вниз к положению полного введения в ядро реактора, как изображено на фигуре 5. Во время спуска передвигаемых деталей, сила буферной пружины 68 удерживает амортизатор быстрой остановки 66 вне отверстия подъемного устройства поршня 62, предотвращая заполнение жидкостью полости между поршнями 62, 66. Когда верхняя поверхность амортизатора быстрой остановки 66 касается неподвижной цилиндрической опорной плиты 54, последовательное движение подъемного устройства поршня 62 вытесняет задержавшуюся жидкость через регулируемые потоком заслонки, уменьшая, таким образом, кинетическую энергию передвигаемых деталей. Дополнительно, кинетическая энергия уменьшается за счет упругой деформации компонентов передвигаемых деталей, в особенности длинного, и относительно тонкого, соединительного стержня 56. Предполагаются и другие механизмы уменьшения кинетической энергии. При вытеснении жидкости из полости, подъемное устройство поршня 62 касается амортизатора поршня 66, приводя передвигаемые детали к остановке.
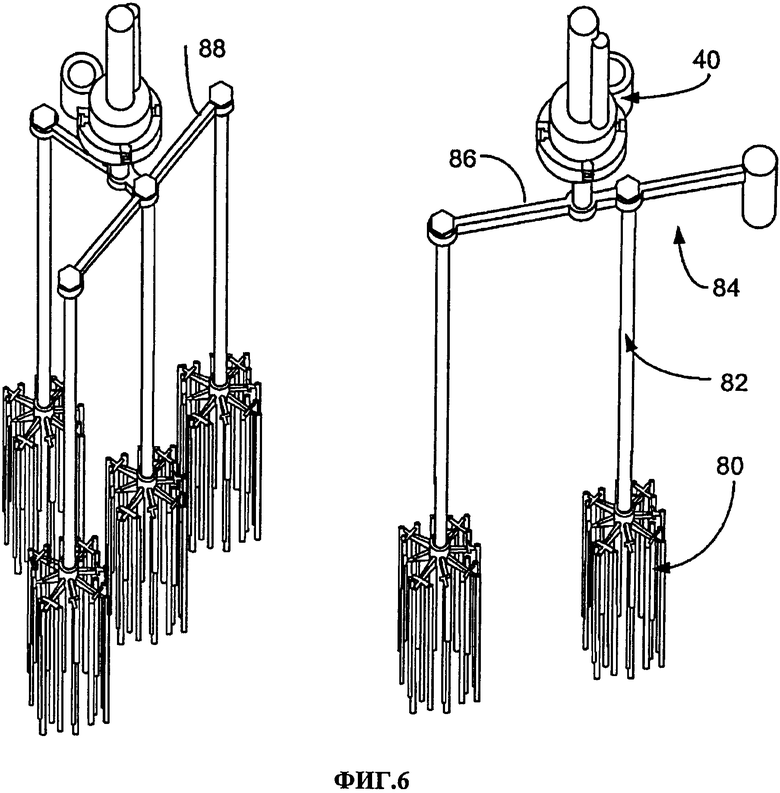
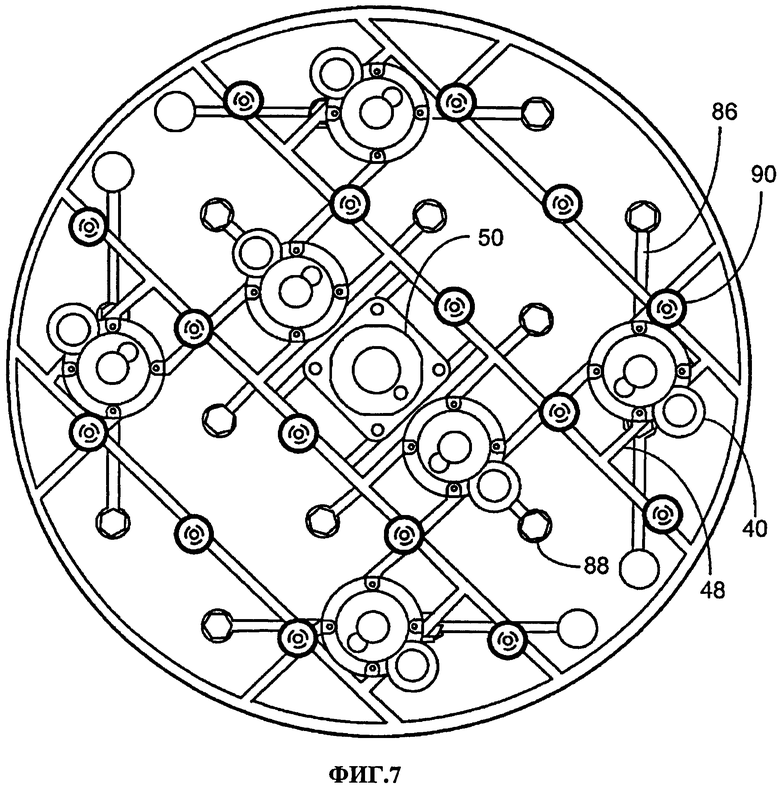
На фигурах 1 и 2, а также на фигурах 6-14 изображен вариант осуществления серых стержней и связанных с ним механизмов управления 40. Как видно на фигуре 6, существует два различных вида серого стержня (тип 1 и тип 2). Серые стержни 80 сгруппированы в группы, которые в свою очередь образуют подгруппы из двух или четырех стержней, закрепленные с помощью соединительных стержней 82, как показано на фигуре 6. Тип 1 также состоит из противовеса 84 на месте одной из сборки группы/соединительного стержня. В частности, хомут 86 соединяет два соединительных стержня 82 и противовес 84, образуя серый стержень, тип 1. Хомут 88 соединяет три соединительных стержня 84, образуя серый стержень, тип 2. Механизм управления 40 серым стержнем располагается над ядром реактора 12. Фигура 7 показывает вид сверху расположения механизмов управления 40 серым стержнем и цилиндрический корпус 50 останавливающих стержней, относительно опорного элемента 48 CRDM. Цилиндрический корпус 50 останавливающих стержней расположен центрально. Четыре наружных механизма управления 40 серыми стержнями, каждый двигающий два стержня типа 1, включая хомут 86, работают одновременно. Два внешних механизма 40, каждый двигающий четыре стержня типа 2, включая хомут 88, также работают одновременно. Эти различные группы механизмов 40 по выбору могут работать вместе или отдельно друг от друга. Провода для передачи сигналов и питания проложены через герметичные трубы или через приборный короб 90 к соединителям на среднем фланце 29 (не показан на фигуре 7).
В отношении останавливающих стержней, удлинительные стержни соединяют сети управляющих стержней с решеткой стержня так, чтобы они могли проходить через решетку и отдельные группы не мешали друг другу опускаться. Дополнительно, удлинительные стержни факультативно могут быть высвобождены из сети управляющих стержней, так что серые стержни могут оставаться в ядре реактора, тогда как верхние внутрикорпусные устройства извлечены или извлекаются, в то время как внутрикорпусные устройства в основании ядра остаются на месте. Существует два варианта изготовления управляющих механизмов серыми стержнями: «магнитное гнездо» и «ходовой винт». Второй тип обеспечивает более точное управление положением группы серых стержней, соответственно, изображенный вариант осуществления использует вариант второго типа.
На фигуре 8, в одном из вариантов осуществления механизм управления 40 серыми стержнями использует конструкцию подъемного стержня с шариковой гайкой. Фигура 8 показывает полностью введенное состояние (слева) и полностью извлеченное состояние (справа). Изображения на фигуре 8 показывают хомут 88 типа 2, для типа 1 устройство хомута 88 заменено хомутом 86. В варианте осуществления, показанном на фигуре 8, верхнее устройство остановки/амортизации расположено на опоре реактора 101, также дополнительно предусмотрена электромагнитная катушка с дополнительными боковыми опорами. Нижняя и верхняя опорные трубы 102, 104, которые расположены на вершине верхней части стопора 100, обеспечивают направляющие для направляющего винтового/вращающегося приемного устройства. Сборка шариковая гайка/мотор 106 расположена на вершине верхней опорной трубы 104 и электромагнитная катушка 108 расположена на вершине двигателя. Внутри электромагнитной катушки 108 располагается подъемное направляющее стержни винтовое фиксирующее приспособление 110, которое в зафиксированном состоянии поддерживает подъемно/соединительную стержневую сборку 112 (дополнительно видно во введенном состоянии на левом рисунке).
Индикатор местоположения расположен на опорных трубах 102, 104 между шариковой гайкой/двигателем 106 и верхней частью стопора 100. В некоторых вариантах осуществления, индикатором местоположения является линейный потенциометр, расположенный специальным образом под фиксирующим приспособлением, хотя возможны и другие варианты компоновки. Изображенный линейный потенциометр включает стяжную катушку 120, установленную на опорной трубе 102, а также «шнур» или кабель 122, одним концом соединенный с подъемно/соединительной стержневой сборкой 112, так что шнур или кабель вытягивается из катушки 120 в зависимости от натяжения подъемно/соединительной стержневой сборки 112 (и, следовательно, присоединенной группы серых стержней), двигаясь в направлении ядра реактора 12 (не показан на фигуре 8). Когда движение меняет направление, натяжение стяжной катушки 120 вызывает обратное наматывание шнура или кабеля 122 на катушку 120. Сенсор вращения 124 измеряет скорость вращения стяжной катушки 120 с помощью счетчика, который подсчитывает число контрольных меток, или с помощью других мер измерения скорости. Расположение линейного потенциометра может быть иное, чем изображенное на фигурах, поскольку натяжная катушка 120 расположена так, что остается неподвижной относительно серого стержня и движение обеспечивается шнуром или кабелем 122. Также возможно объединить сенсор вращения 124 вместе со стяжной катушкой 120. Линейный потенциометр выдает выходной электрический сигнал, согласованный с положением соединительного стержня или других деталей 112, которые двигаются вместе с серым управляющим стержнем, таким образом обеспечивая информацию о положении серого стержня внутри ядра реактора 12. Электрический сигнал, указывающий положение, пересылается из корпуса реактора 10 по проводам (не показаны), которые могут быть меньшего размера, чем другие электрические выводы. Устройство определения положения изготовлено и откалибровано для работы при температуре и уровне радиации, свойственном ядерному реактору.
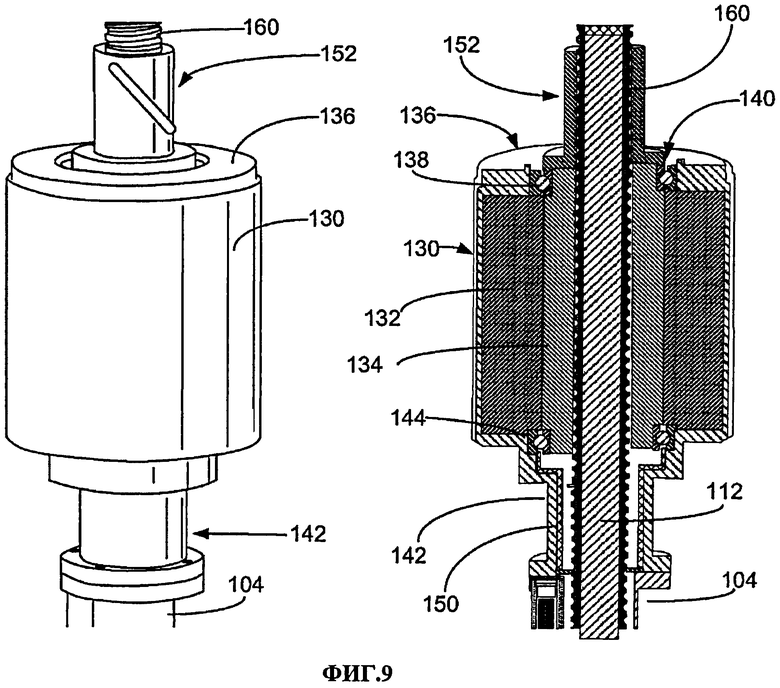
На следующей фигуре 8, а также на фигурах 9-14 на изображенном варианте осуществления передвигаемые детали серого стержня CDRM 40 включают три элемента: направляющий винтовой вращательный отборник, подъемное устройство соединительного стержня, фиксирующая система, которая быстро сцепляет поднимающийся стержень с направляющим винтом. Фигура 9 показывает общий вид (слева) и вид в разрезе (справа) направляющего винтового вращательного отборника. Двигатель включает корпус статора 130, закрывающий статор 132 и ротор 134. Верхняя торцевая крышка 136 статора и радиальные подшипники 138 с регулируемыми промежутками 140 занимают верхнюю часть двигателя, тогда как нижняя часть корпуса 142 и опорные подшипники 144 занимают нижнюю его часть. Верхняя шаровая вращающаяся гайка 150 расположена в нижней части корпуса 142 и навинчена на ротор 134, и верхняя шаровая вращающаяся гайка 152 также навинчена на ротор 134. Обе шаровые вращающиеся гайки 150, 152 соединены между собой, так как накручены на направляющий винт 160 (как показано на фигуре 9). Фигура 9 также показывает часть подъемного стержня и верхней опорной трубы 104.
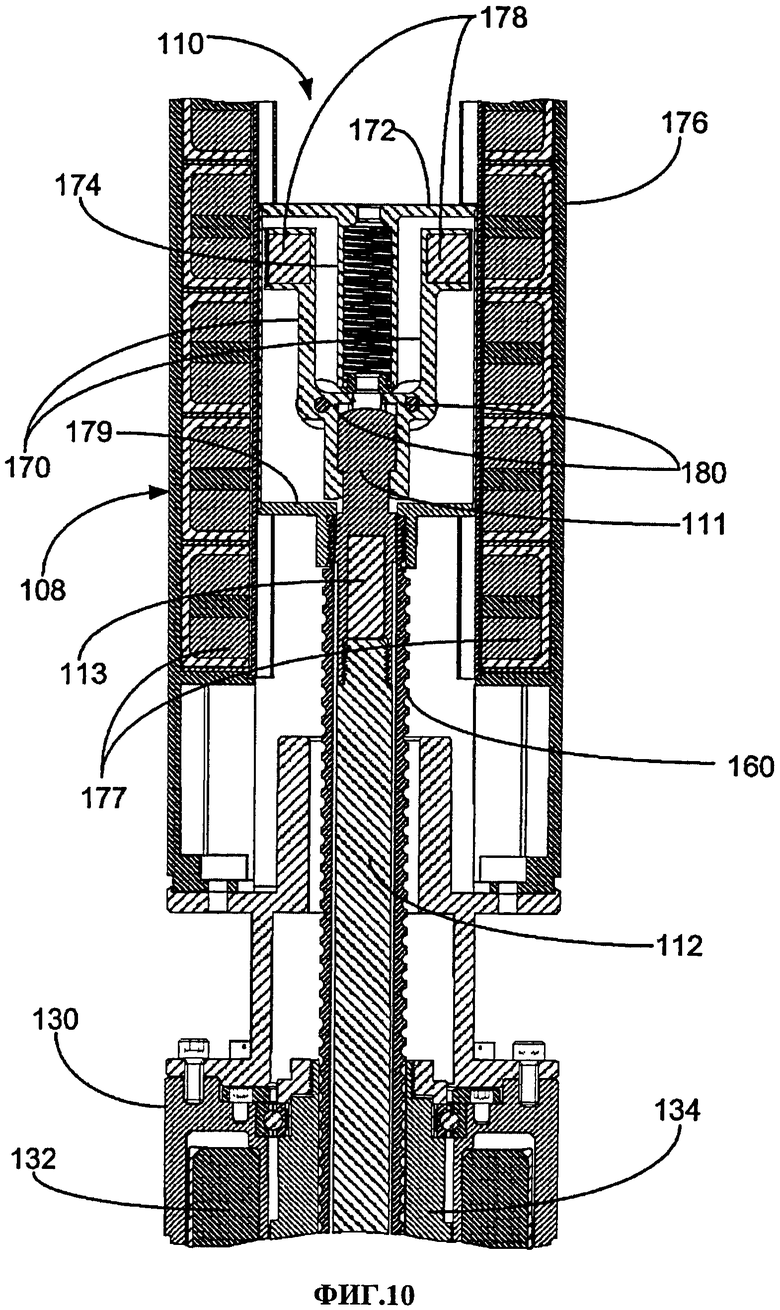
На фигуре 10, изображен фиксатор, включающий направляющее стержни винтовое фиксирующее приспособление 110 и часть электромагнитной катушки 108. Также на фигуре 10 показан наконечник 111 подъемного стержня 112 и соседний наконечник 160 направляющего винта, заканчивающегося на фиксирующем приспособлении 110. Фиксаторы 170 непосредственно соединяют верхний наконечник 111 подъемного стержня 112 с направляющим винтом 160 для нормальной работы и разъединяют подъемный стержень 112 во время аварийной остановки (смотри фигуру 11). Верх подъемного стержня 112 скручен с верхом соединительного стержня 82 (например, с помощью хомутов 86 или 88), образуя, таким образом, непрерывную связку: подъемный стержень/соединительный стержень. Верх соединительного стержня 82 соединен непосредственно с сетями управляющего стержня, присоединяя, таким образом, управляющие стержни к механизмам. Дополнительно, магнит 113 расположен в непосредственной близости от верхней части 111 подъемного стержня 112 для передачи магнитного сигнала на индикатор положения (см. фигуру 21). Фигура 10 также показывает часть мотора, включая часть корпуса 130, статор 132, ротор 134, который полностью показан на фигуре 9.
Фиксаторы 170 закрыты корпусом 172, который включает пружинную направляющую для фиксирующей пружины 174. Дополнительные элементы изображенной фиксирующей системы включают корпус электромагнита 176, закрывающий электромагниты 177, формируя блок электромагнитных катушек, и постоянные магниты 178 на фиксаторах 170. Направляющий винт 160 вкручен в опору фиксирующей системы 179 корпуса фиксатора 172. Фиксаторы 170 вращаются вокруг поворотных фиксаторов 180 для обеспечения надежной аварийной остановки, вызванной введением опускаемого стержня.
В этом варианте осуществления, направляющий винт 160 непрерывно опирается на шариковые гайки двигателя (хорошо видно на фигуре 9), что позволяет очень хорошо управлять положением направляющего винта и, следовательно, хорошо управлять положением управляющего стержня. В изображеном варианте осуществления, двигатель (например, статор 132, ротор 134) является синхронным двигателем, в котором ротор 134 является постоянным магнитом. Это выполнение имеет преимущества, такие как компактность и простота, однако возможны другие варианты выполнения мотора.
Направляющий винт 160 не останавливается быстро. Напротив, во время аварийной остановки верхний наконечник подъемного устройства стержня 112 связки подъемный стержень/соединительный стержень отсоединяется от направляющего винта 160 с помощью магнитоуправляемой фиксирующей системы (см. фигуру 11). Когда сила разъединяет электромагниты 177, надежная фиксирующая система разъединяет подъемный/соединительный стержни (и управляющий стержень) от направляющего винта, вызывая аварийную остановку. Верхний упор и буферная система (не показана, но похожа на верхний упор и буферную систему изображенных останавливающих стержней, описанных выше и изображенных на фигурах 4 и 5) встроены в блок опора/буфер для уменьшения кинетической энергии в конце аварийной остановки и для поднятия нижней части стержня. Вращающийся отборник (не показан) соединен с направляющим винтом 160, вызывая вращение мотора, вызывая передвижение связки направляющий винт/управляющий стержень.
Нормальное состояние устройства (до аварийной остановки) показано на фигурах 9 и 10. Фигура 9 показывает сборку шариковая гайка/двигатель, фигура 10 показывает фиксирующую систему в нормальном состоянии. Как видно на фигуре 11, постоянные магниты 178 на фиксаторах 170 притянуты магнитной силой в направлении заряженных электромагнитов 177, вращая фиксаторы 170 вокруг поворотных фиксаторов 180 и сцепляя фиксаторы 170 со стыковочной областью подъемного стержня 112. Таким образом, фиксаторы 170 закреплены вместе с подъемным стержнем 112 в нормальном состоянии, показанном на фигуре 10. Далее, опора 179 фиксирующей системы привинчена или иным образом прикреплена к направляющему винту 160. Соответственно, в нормальном состоянии на фигуре 10 подъемный стержень 112 прикреплен к направляющему винту 160 через фиксирующую систему, и для того чтобы сборка шариковая гайка/двигатель, показанная на фигуре 9, перемещала направляющий винт 160, подъемный стержень 112 перемещается направляющим винтом 160.
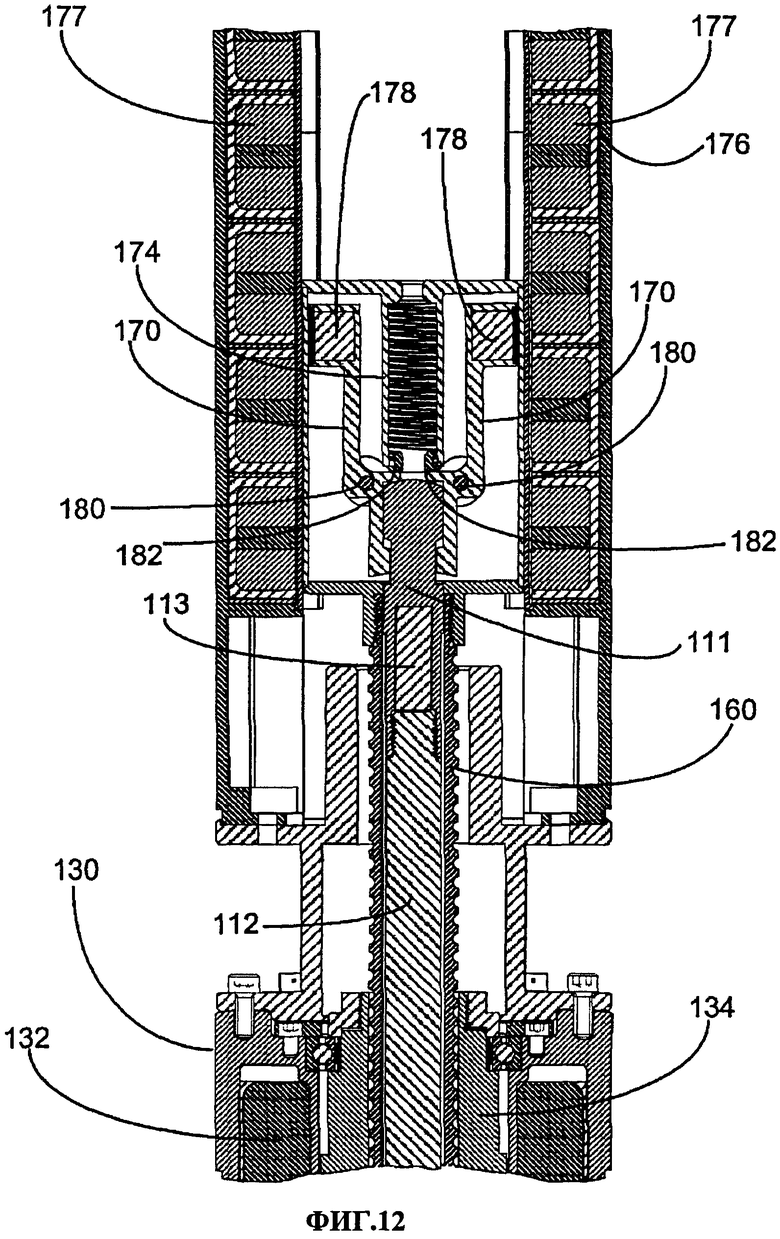
Аварийная остановка описана на фигуре 11, которая показывает подъемный стержень 112 и, следовательно, сборку управляющего стержня во время аварийной остановки. Аварийная остановка вызывается отключением электроэнергии в электромагнитах 177, то есть они отключаются. Это вызывает пропадание силы притяжения в постоянных магнитах 178 фиксаторов 170, и фиксирующая пружина 174 растягивается до разворота фиксаторов 170 относительно поворотных фиксаторов 180 и в сторону от стыковочной области подъемного стержня 112. Это расцепляет фиксаторы 170 от подъемного стержня 112, и сборка подъемный стержень/соединительный стержень (а также сборка управляющего стержня) опускается в направлении реактора 12. Направляющий винт 160 виден на фигуре 11 на уровне, соответствующем положению до его изъятия (то есть направляющий винт 160 не был аварийно остановлен), но электроэнергия в электромагнитах 177 отключилась так, что магнитная сила в катушках пропала.
Как далее показано на фигуре 11, поворот фиксаторов 170 относительно поворотных фиксаторов 180 прекращается за счет столкновения в точке 181 с направляющей пружиной корпуса фиксатора 172.
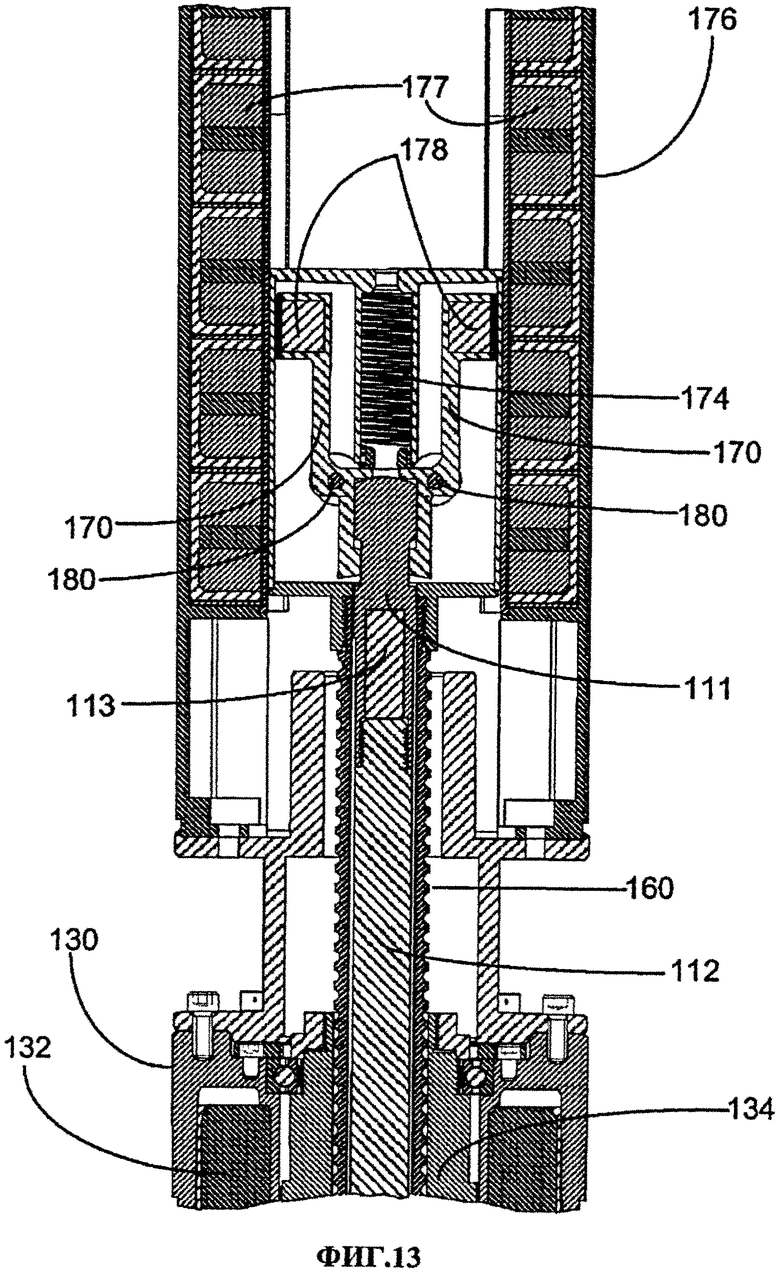
На фигуре 11 и далее на фигурах 12 и 13 изображен направляющий винт 160, приводимый, для повторного сцепления механизма, в полностью введенное положение двигателем с шариковой гайкой (см. также фигуру 9). Направляющий винт содержит на своем основании датчик для подтверждения его полного введения. На фигуре 12 изображен направляющий винт 160 в полностью введенном положении к угловой кулачковой поверхности 182 на наконечнике 111 подъемного стержня 112, который аварийно останавливается до основания, приводя фиксаторы 170 в полностью сомкнутое положение. На фигуре 13 изображены фиксаторы 170, когда питание электроэнергией электромагнитов восстановлено, повторно сцепленные со стыковочной областью подъемного стержня 112, так что сборка подъемный стержень/соединительный стержень повторно присоединена к направляющему стержню 160. Затем нормальный режим работы возобновляется согласно фигуре 10. Для повторения, фигура 12 показывает направляющий винт 160, направляемый обратно вниз в полностью введенное положение в готовности для повторного сцепления направляющего стержня 112. Электроэнергия в электромагнитных катушках 177 все еще отсутствует и фиксаторы 160 все еще расцеплены. Угловые кулачковые поверхности 182 на наконечнике 111 подъемного стержня 112 переводят фиксаторы 170 назад в частично сцепленное состояние с наконечником 111 подъемного стержня 112. Фигура 13 показывает направляющий стержень 160 все еще опущенным, но с восстановленной подачей электроэнергии в электромагнитных катушках 177. Восстановленная магнитная сила теперь повторно сцепляет фиксаторы 170 со стыковочной областью подъемного стержня 112.
Фигура 9 схематично показывает соответствующий вариант осуществления сборки шариковая гайка/мотор 106, включая нижнюю и верхнюю сборки 150, 152. В общем случае, по существу может быть использован любой вид двигателя, подходящий для работы в корпусе давления реактора.
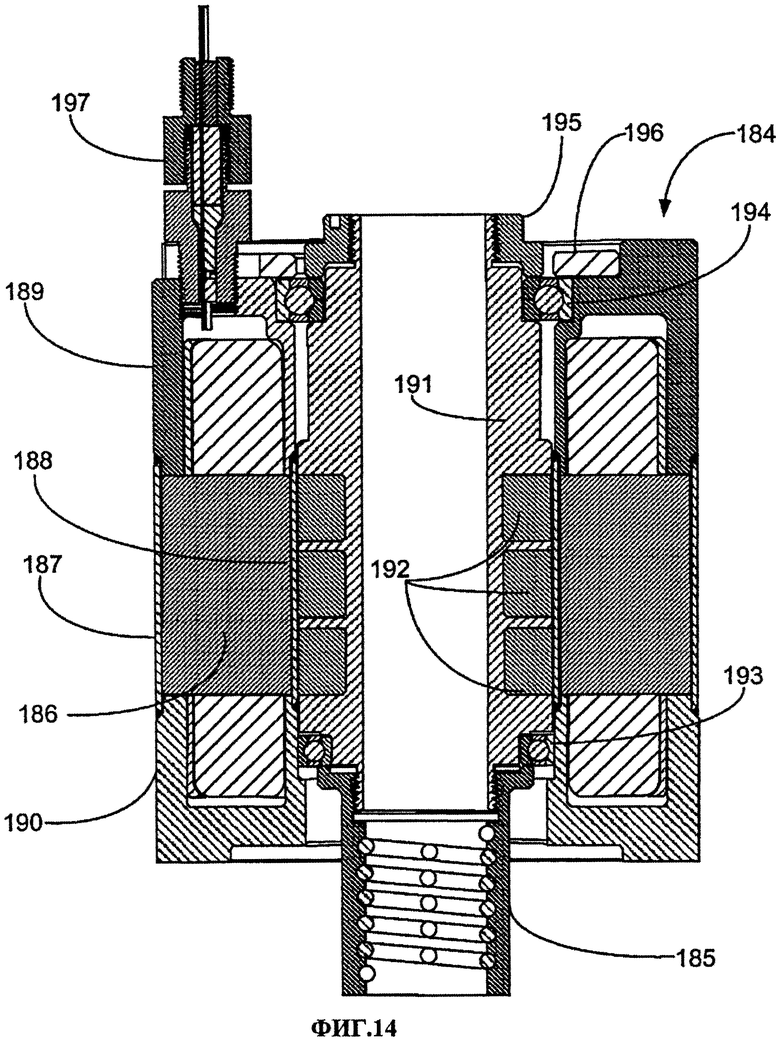
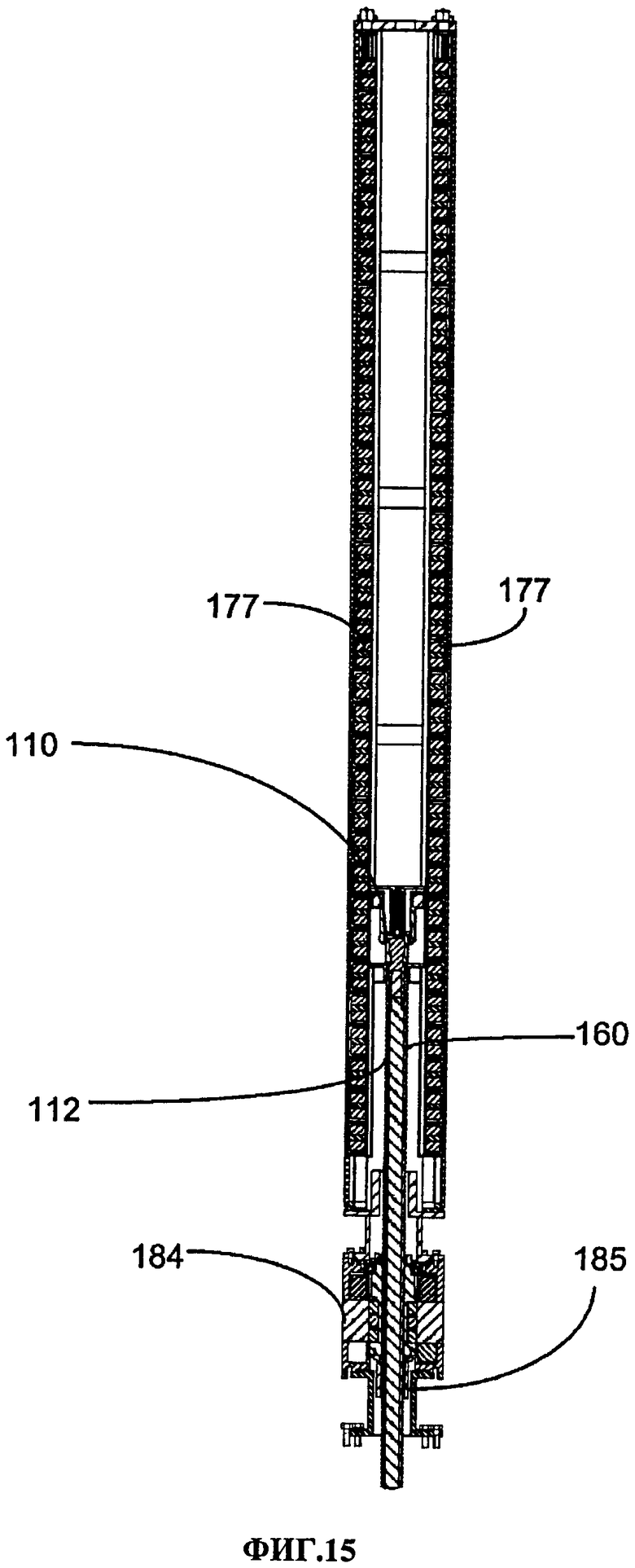
На фигурах 14 и 15 показан один из вариантов осуществления двигателя с использованием бесщеточного двигателя постоянного тока с электронным управлением (BLDC) 184 с нижней сборкой шаровой гайки 185. Сборки 184, 185 являются вариантом осуществления сборки шариковая гайка/двигатель 106. Изображенный на фигуре 14 BLDC двигатель содержит статор с сердечником и обмоткой 186, расположенной между внешним кожухом 187 и внутренним кожухом 188 статора, и закрытый верхним корпусом 189 и нижним корпусом 190. Ротор 191 содержит постоянные магниты 192. BLDC двигатель 184 производит крутящий момент вследствие взаимодействия магнитного потока 192 и пропускающих электрический ток проводников обмотки статора 186. Нижняя сборка шаровой гайки 185 аналогична нижней сборке шариковой гайки 150, изображенной на фигуре 9, однако в изображенной на фигуре 14 сборке отсутствует верхняя сборка шариковой гайки, соответствующая сборке 152, изображенной на фигуре 9. Сборка на фигуре 14 также состоит из радиального подшипника 193, упорного подшипника 194, закрепленного фиксирующей гайкой 195 радиального подшипника, а также колпака 196 двигателя. Электрические соединения двигателя выполнены из изолированного и прочного металлического подводящего провода. Например, могут быть применены провода таких производителей, как Conax® Technologies (Buffalo, New York, USA). На фигуре 15 изображен BLDC двигатель 184 и нижняя сборка 184 в контексте устройства управления стержнями (CRDM), изображенного на фигурах 10-13. Изображенное на фигуре 15 устройство также включает до этого описанные электромагниты 177, направляющее стержни винтовое фиксирующее приспособление 110, направляющий винт 160 и подъемный стержень 112. Сборка шариковой гайки 185 сцепляет направляющий винт 160 так, что двигатель 184 вращает ротор 191 с постоянными магнитами, и скрепленные вместе сборка 185 и направляющий винт 160 двигаются линейно.
Возвращаясь к фигурам 1 и 2, преимуществом описанного выполнения реактора является то, что средняя секция включает средний фланец 29. Эта секция может быть относительно тонкой и обеспечивать опору для устройства управления стержнями, а также может являться направляющими для измерительной аппаратуры в реакторе. Эта секция обеспечивает электрический и гидравлический входы для устройств CRDM. Каналы для охлаждающей реактор жидкости (не показаны) также дополнительно могут содержаться в этой секции. Эти каналы могут быть дополнительно изолированы внутренним клапаном всякий раз, когда в реакторе повышается давления для ограничения или ликвидации возможной потери охлаждающей жидкости (LOCA).
Изображенные верхние внутрикорпусные устройства 24, включающие CRDM не содержат термоизоляцию. Однако может быть предусмотрена изоляция указанных компонентов с использованием системы изоляции, способной выдерживать температуру около 650 градусов по Фаренгейту (343 градуса по Цельсию). Использование системы изоляции позволяет отказаться от внешней охлаждающей жидкости, хотя она также может дополнительно использоваться. Например, охлаждающая жидкость может поступать к электрическим устройствам для уменьшения нагрева, вызванного работой оборудования. Система изоляции позволяет расположить электрическое устройство CRDM внутри корпуса давления, что снижает конечный вес корпуса реактора 10, существенно снижает количество проникновений в корпус реактора 10 и позволяет перемещать полностью модуль реактора как отдельную конструкцию. Другим преимуществом является уменьшение конечного веса защитного сооружения (не показано). Хотя использование изоляции является преимуществом, возможны другие технические решения с использованием охлаждающей жидкости и/или специальных материалов, способных выдерживать высокотемпературный режим работы без изоляции.
В описанном варианте осуществления реактор выполнен с водяным охлаждением (PWR). Однако описанные способы и устройства также применимы для других типов ядерных реакторов, таких как кипящие ядерные реакторы (BWR), которые могут содержать внутренние устройства CRDM, датчики эффективного управления стержня и др.
Выше был описан предпочтительный вариант осуществления изобретения. Очевидно, что другие варианты осуществления могут иметь место по прочтении и понимании детального описания. Изобретение может быть осуществлено с использованием других вариантов в той мере, какой они возможны в объеме заявленной формулы и ее эквивалентных признаков.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ СТЕРЖНЯМИ В ЯДЕРНОМ РЕАКТОРЕ | 2011 |
|
RU2580820C2 |
| ПРИЖИМНАЯ ПРУЖИНА ТЕПЛОВЫДЕЛЯЮЩЕЙ СБОРКИ ЯДЕРНОГО РЕАКТОРА | 2011 |
|
RU2573598C2 |
| СПОСОБ ПРОВЕРКИ РАБОТЫ АКТИВНОЙ ЗОНЫ КОНТРОЛЬНО-ИЗМЕРИТЕЛЬНЫМИ ПРИБОРАМИ АКТИВНОЙ ЗОНЫ | 2010 |
|
RU2508571C2 |
| УЗЕЛ ПРУЖИНЫ КАМЕРЫ ПОВЫШЕННОГО ДАВЛЕНИЯ И ТОПЛИВНОГО СТЕРЖНЯ | 2011 |
|
RU2573582C2 |
| ОПОРНАЯ РЕШЕТКА ЯДЕРНОЙ ТЕПЛОВЫДЕЛЯЮЩЕЙ СБОРКИ | 2010 |
|
RU2537693C2 |
| УДЕРЖИВАЮЩИЙ УЗЕЛ ДЛЯ КОМПОНЕНТОВ АКТИВНОЙ ЗОНЫ ЯДЕРНОГО РЕАКТОРА | 2009 |
|
RU2482557C2 |
| СМЕШАННО-ОКСИДНАЯ ТЕПЛОВЫДЕЛЯЮЩАЯ СБОРКА | 2009 |
|
RU2506656C2 |
| ВНУТРИЗОННАЯ ИЗМЕРИТЕЛЬНАЯ СБОРКА В КАНАЛЕ | 2012 |
|
RU2609154C2 |
| ЯДЕРНЫЙ РЕАКТОР | 2004 |
|
RU2338275C2 |
| ЯДЕРНЫЙ РЕАКТОР С ЖИДКОМЕТАЛЛИЧЕСКИМ ТЕПЛОНОСИТЕЛЕМ | 2021 |
|
RU2756231C1 |

Изобретение относится к устройствам управления стержнями в ядерном реакторе (CRDM). Устройство содержит: соединительный стержень, соединенный с по меньшей мере одним управляющим стержнем; направляющий винт; устройство управления, предназначенное для линейного перемещения направляющего винта; электромагнитные катушки; фиксирующее устройство, которое сцепляет стержень с направляющим винтом, реагирует на возбуждение электромагнитных катушек и расцепляет соединительный стержень от направляющего винта при снижении возбуждения электромагнитных катушек. Технический результат - повышение точности и надежности ввода стержней. 4 н. и 18 з.п. ф-лы, 15 ил.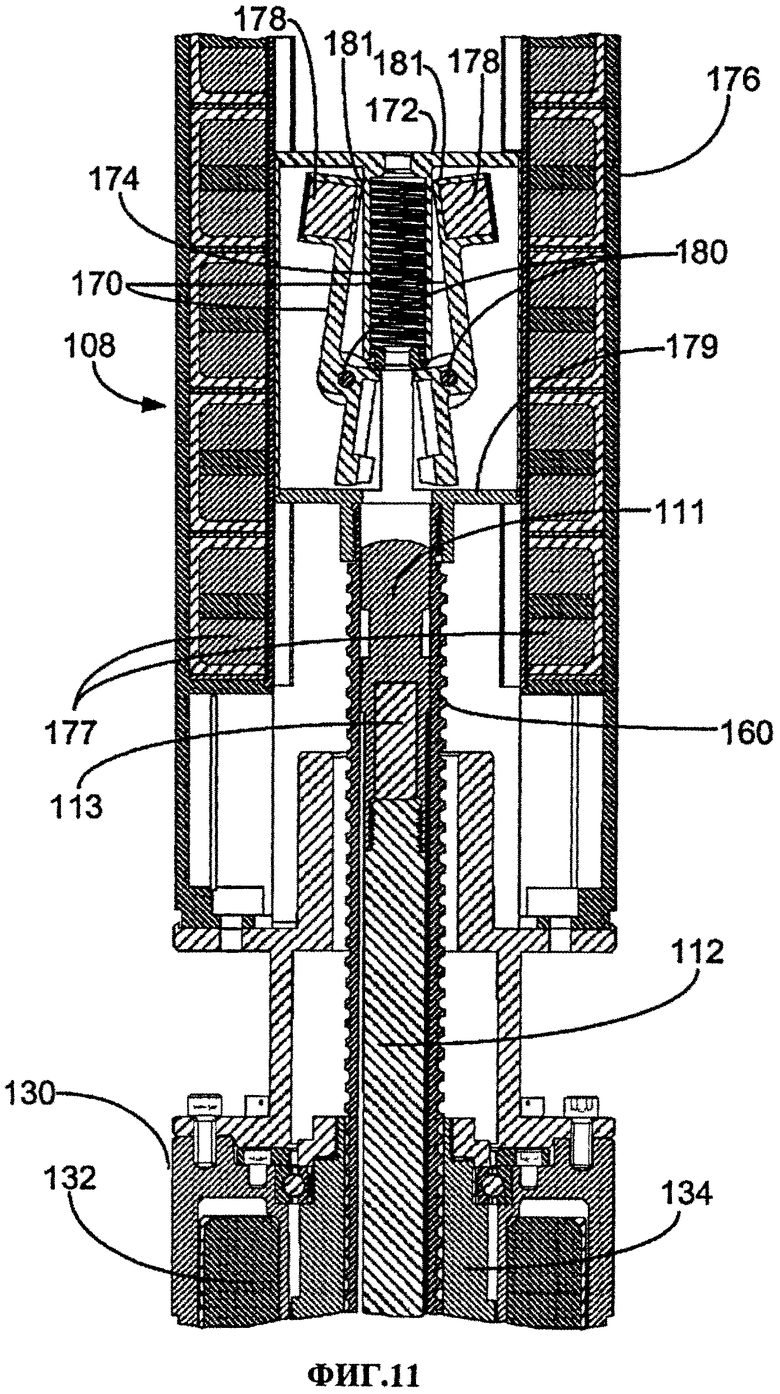
1. Устройство управления стержнями в ядерном реакторе, включающее:
- управляющий стержень, предназначенный для введения в активную зону ядерного реактора для поглощения нейтронов;
- подъемный стержень, скомпонованный для поддержания веса управляющего стержня;
- полый направляющий винт, через который проходит подъемный стержень;
- управляющий механизм, включающий (i) вращающуюся муфту, сцепленную с направляющим винтом, и (ii) двигатель, сцепленный с муфтой для ее вращения, приводной механизм скомпонован для запуска с помощью муфты, сцепленной с направляющим винтом для линейного поступательного движения направляющего винта;
-фиксатор, установленный на направляющем винте и скомпонованный для фиксации с подъемным стержнем, причем фиксатор, зафиксированный подъемный стержень и управляющий стержень сдвигаются вместе с направляющим винтом, фиксатор, установленный на направляющем винте, также скомпонован для открытия, в ответ на потерю или пропадание электрической энергии, для расцепления подъемного стержня, причем расцепленный подъемный стержень и направляющий стержень опускаются вниз под действием гравитации для аварийной остановки управляющего стержня при расцеплении фиксатора, причем фиксатор не включает в себя вращающуюся муфту приводного механизма.
2. Устройство по п. 1, отличающееся тем, что управляющий стержень включает множество управляющих стержней и подъемный стержень сконфигурирован для выдерживания веса множества направляющих стержней с помощью паутинной связки, соединяя подъемный стержень с множеством управляющих стержней.
3. Устройство по п. 1, отличающееся тем, что также включает электромагнит, скомпонованный для магнитного управления фиксатором, причем открытие фиксатора для расцепления подъемного стержня вызывается потерей или пропаданием электрической энергии.
4. Устройство по п. 1, отличающееся тем, что подъемный стержень перемещается через направляющий винт и фиксатор расположен на верхнем конце направляющего винта и скомпонован так, чтобы соединяться с верхним концом подъемного стержня.
5. Устройство по п. 3, отличающееся тем, что электромагнит имеет длину, равную или больше, чем длина линии хода движения, по которой фиксатор может линейно поступательно передвигаться с помощью управляющего механизма.
6. Устройство по п. 3, отличающееся тем, что фиксатор содержит постоянные магниты, соединенные с электромагнитом, когда электрическая энергия подается на электромагнит.
7. Устройство по п. 3, отличающееся тем, что фиксатор механически открывается с замедлением и электрическая энергия, подаваемая на магнитоуправляемый электромагнит, закрывает фиксатор для зацепления с подъемным стержнем.
8. Устройство по п. 7, отличающееся тем, что фиксатор механически открывается с замедлением при помощи пружины.
9. Устройство по п. 3, отличающееся тем, что электромагнит скомпонован таким образом, чтобы не перемещаться с направляющим винтом, когда управляющий механизм приводится в движение для линейного перемещения направляющего винта.
10. Устройство по п. 9, отличающееся тем, что включает корпус электромагнита, который закрывает электромагнит, причем фиксатор расположен внутри корпуса электромагнита.
11. Ядерный реактор, включающий:
- активную зону;
- корпус давления, включающий нижнюю секцию корпуса давления с активной зоной, верхнюю секцию корпуса давления, расположенную над активной зоной и над нижней секцией корпуса давления, а также средний фланец, расположенный над активной зоной и между нижней секцией корпуса давления и верхней секцией корпуса давления;
- внутреннее устройство управления стержнями (CDRM), закрепленное средним фланцем.
12. Ядерный реактор по п. 11, отличающийся тем, что содержит встроенный водяной генератор, расположенный в корпусе давления над средним фланцем.
13. Ядерный реактор по п. 11, отличающийся тем, что содержит встроенные сборки, в виде сетки, поддерживающие CDRM и прикрепленные к среднему фланцу.
14. Ядерный реактор по п. 11, отличающийся тем, что содержит рамы направляющих управляющего стержня, поддерживаемые средним фланцем.
15. Ядерный реактор по п. 11, отличающийся тем, что включает устройство управления с гидравлическим отключением управляющего стержня, поддерживаемые средним фланцем.
16. Ядерный реактор по п. 11, отличающийся тем, что внутреннее устройство (CDRM) содержит: двигатели внутреннего устройства (CDRM), расположенные внутри корпуса давления, а в среднем фланце предусмотрены электрические и гидравлические входы к внутреннему устройству (CDRM).
17. Ядерный реактор по п. 11, отличающийся тем, что внутреннее устройство (CDRM) содержит:
- соединительный стержень, соединенный с управляющим стержнем;
- направляющий винт;
- устройство управления, предназначенное для линейного поступательного перемещения направляющего винта;
- фиксатор, имеющий:
зафиксированное состояние (i), при котором соединительный стержень зафиксирован с направляющим винтом, так что соединительный стержень двигается вместе с направляющим винтом, а направляющий винт линейно поступательно перемещается управляющим механизмом;
незафиксированное состояние (ii), при котором соединительный стержень не зафиксирован с направляющим винтом.
18. Устройство управления стержнями (CDRM) в ядерном реакторе, включающее:
- управляющий двигатель, содержащий ротор;
- направляющий винт, сцепленный с управляющим двигателем, причем направляющий винт сконфигурирован для перемещения, но не для вращения в ответ на вращение ротора управляющего двигателя;
- фиксирующее приспособление, расположенное на направляющем винте; и
- подъемный стержень, скомпонованный для поддержания веса управляющего стержня;
причем фиксирующее приспособление, расположенное на направляющем винте, скомпоновано таким образом, что содержит:
(i) зафиксированное состояние, в котором подъемный стержень зафиксирован с направляющим винтом с помощью фиксирующего приспособления, расположенного на направляющем винте, и
(ii) не зафиксированное состояние, в котором фиксирующее приспособление, расположенное на направляющем винте, отцепляется в ответ на потерю энергии, вызывающее аварийную остановку, для отсоединения подъемного стержня от направляющего винта.
19. Устройство по п. 18, отличающееся тем, что
подъемный стержень перемещается через направляющий винт и фиксирующее приспособление расположено на верхнем конце направляющего винта, и в зафиксированном состоянии верхний конец подъемного стержня соединяется с направляющим винтом с помощью фиксирующего приспособления, расположенного на верхнем конце направляющего винта.
20. Устройство управления стержнями (CDRM) в ядерном реакторе, включающее:
- управляющий стержень, предназначенный для введения в активную зону ядерного реактора для поглощения нейтронов;
- подъемный стержень, имеющий основание и соединенный с управляющим стержнем;
- полый направляющий винт, через который проходит подъемный стержень;
- управляемая при помощи двигателя муфта, скомпонованная так, что вращение муфты вызывает линейное поступательное движение полого направляющего винта; и
- фиксирующее приспособление, расположенное на верхнем конце полого направляющего стержня, причем верхний конец подъемного стержня зафиксирован с помощью фиксатора к верхнему концу полого подъемного стержня, для перемещения вместе с полым направляющим стержнем, в ответ на вращение муфты, причем фиксатор скомпонован так, чтобы открываться в ответ на потерю или пропадание электрической энергии, для расцепления верхнего конца направляющего стержня от верхнего конца полого направляющего винта.
21. Устройство по п. 20, отличающееся тем, что управляющий стержень содержит множество управляющих стержней, соединенных с нижним концом направляющего стержня с помощью паутинной связки.
22. Устройство по п. 20, отличающееся тем, что также содержит электромагнит, скомпонованный для магнитного управления фиксатором, причем потеря или пропадание электрической энергии вызывает открывание фиксатора, для отсоединения верхнего конца подъемного стержня от верхнего конца полого направляющего винта.
| US4713210 A, 15.12.1987 | |||
| ЕМЕЛЬЯНОВ И.Я | |||
| и др., Конструирование ядерных реакторов, Москва, Энергоиздат, 1982, с | |||
| Приспособление к тростильной машине для прекращения намотки шпули | 1923 |
|
SU202A1 |
| US5089211 A, 18.02.1992 | |||
| US4649016 A, 10.03.1987 | |||
| SU757020 A1, 27.01.1996. | |||

