Настоящее изобретение относится к области щековых дробилок и более конкретно к щековой дробилке с двойным кривошипно-коромысловым механизмом.
В настоящее время наиболее широко использующаяся щековая дробилка представляет собой щековую дробилку с составным маятником, которая содержит качающуюся щеку и неподвижную щеку и имитирует перемещение челюсти животного для дробления. Щековая дробилка широко используется в горно-добывающей промышленности, металлургии, промышленности строительных материалов, автодорожной, железнодорожной промышленности, промышленности по охране и рациональному использованию водных ресурсов и химической промышленности для умеренного дробления руд и сыпучих материалов.
С механической точки зрения традиционные щековые дробилки (щековые дробилки с составным маятником, то же самое ниже) имеют общую типичную конструкцию. То есть каждая из традиционных щековых дробилок имеет кривошипно-коромысловый механизм (его эксцентриковый вал представляет собой кривошип, качающаяся щека представляет собой шатун и распорный элемент представляет собой коромысло). Сторона качающейся щеки образует V-образную камеру дробления со стороной рамы. Верхний участок качающейся щеки непосредственно получает горизонтальный ход дробления от эксцентрикового ведущего вала. Нижний участок качающейся щеки обеспечивает круговое движение посредством качающейся щеки для приведения распорного элемента в качающееся движение таким образом, что обеспечиваются горизонтальный силовой ход дробления и ход разгрузки материала. Конструкция является простой и легкой для изготовления, что делает щековую дробилку наиболее широко используемой дробилкой. Но недостаток с этим механизмом заключается в том, что горизонтальный ход дробления и ход разгрузки материала, обеспечивающиеся посредством качающегося распорного элемента, приведенного в движение посредством направленного вверх тянущего усилия качающейся щеки, препятствуют дробящему усилию и разгрузке. То есть, когда требуется большая способность дробления, способность разгрузки материала имеет тенденцию быть нулевой, и когда требуется большая способность разгрузки материала, способность дробления значительно падает.
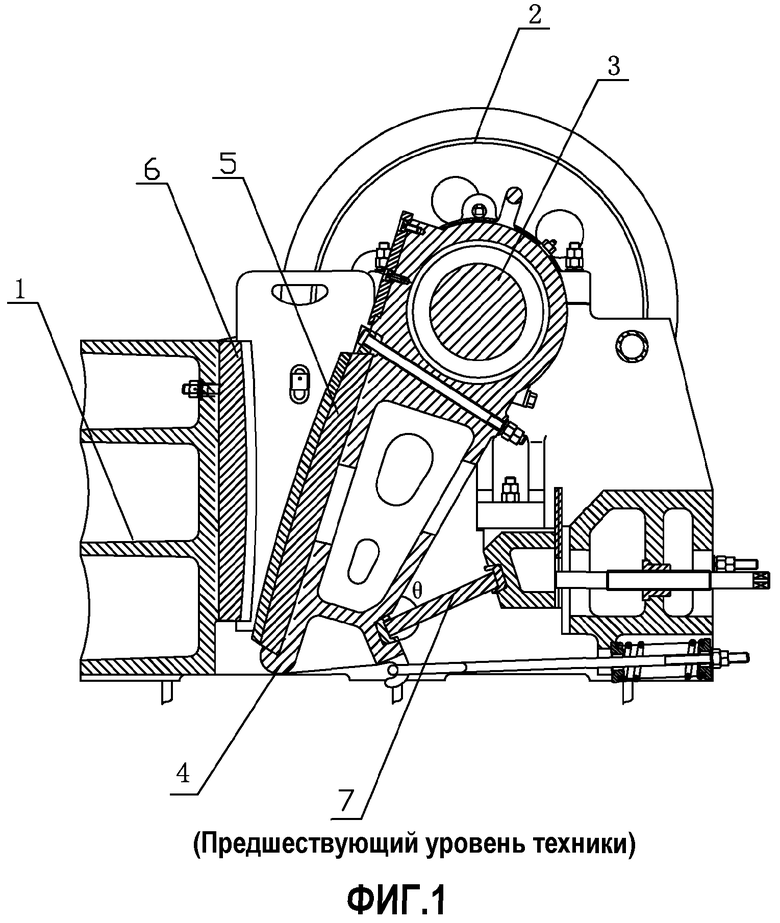
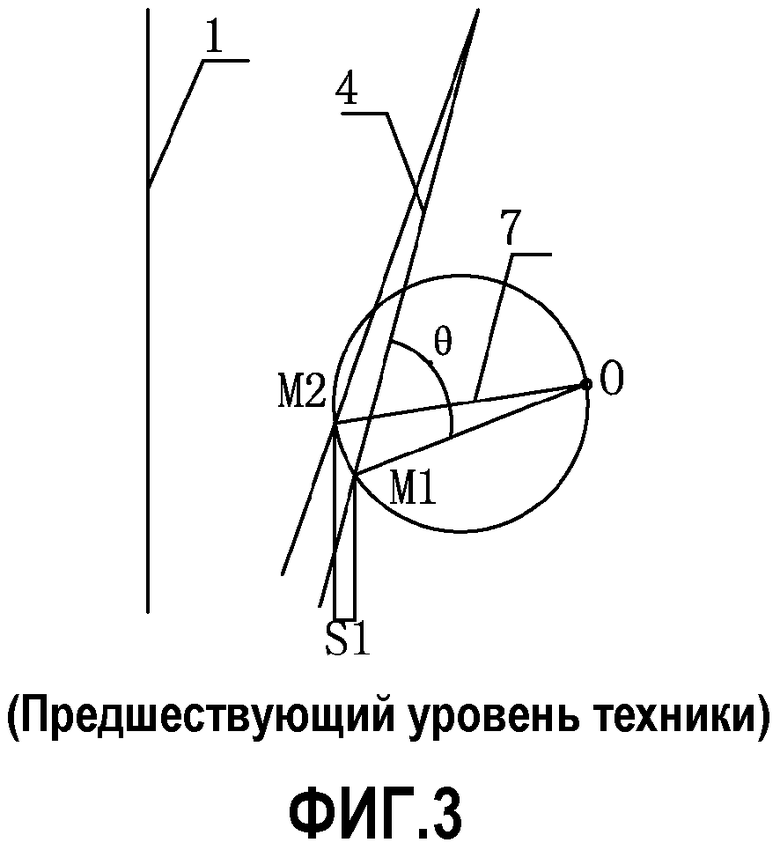
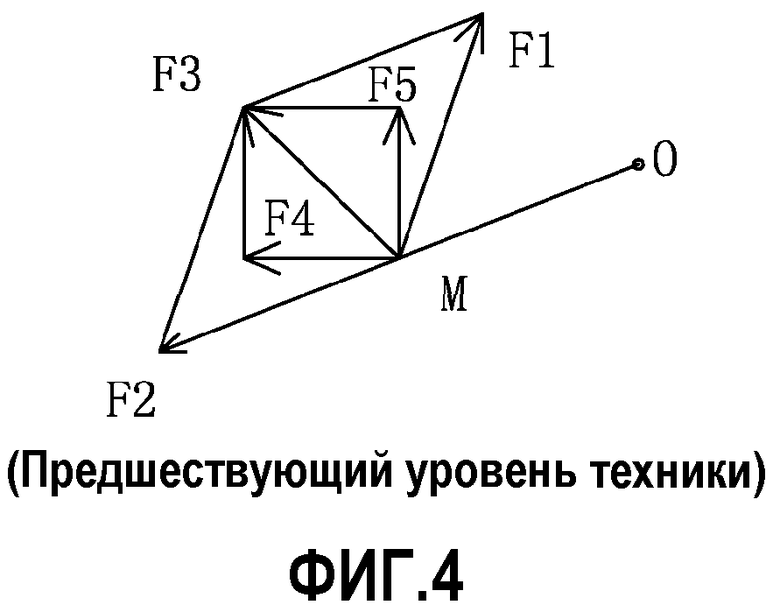
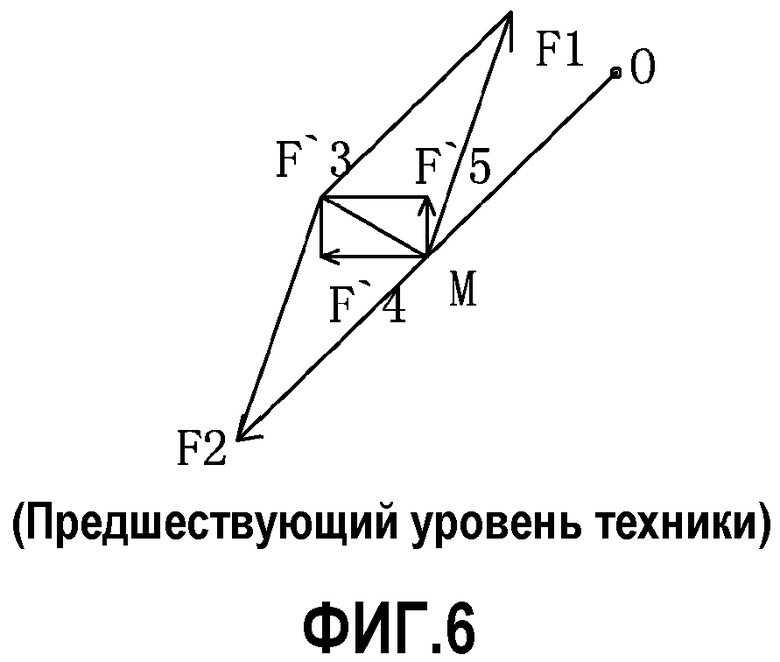
Вышеприведенное несоответствие определяется механическим принципом конструкции. Ссылаясь на фиг.1 чертежей, показан схематичный вид традиционной щековой дробилки. Традиционная щековая дробилка содержит раму 1, эксцентриковый ведущий вал 3, неподвижную плиту 6 щеки, подвижную плиту 5 щеки, переднюю качающуюся щеку 4, передний распорный элемент 7 и ведущее колесо 2. Верхний участок качающейся щеки 4 непосредственно получает горизонтальный ход дробления от эксцентрикового ведущего вала 3. Нижний участок качающейся щеки 4 приводит передний распорный элемент 7 в качающееся движение посредством эксцентрикового ведущего вала 3 таким образом, что обеспечиваются горизонтальный силовой ход дробления и ход разгрузки материала. Когда угол передачи переднего распорного элемента 7 является максимальным (ссылаясь на фиг.3 и фиг.4 чертежей) или минимальным (ссылаясь на фиг.5 и фиг.6 чертежей), растягивающее усилие F1 качающейся щеки и осевое усилие F2 переднего распорного элемента образуют составное усилие F3. F3 можно разложить на вертикальное усилие F5 и горизонтальное усилие F4, причем F4 представляет собой эффективное дробящее усилие. Очевидно, F4 гораздо меньше, чем F1, при условии, что угол передачи θ<90°, и перемещение нижнего участка качающейся щеки всегда находится в состоянии эффекта уменьшения усилия. Кроме того, можно видеть, что верхняя точка М2 останова и нижняя точка М1 останова передней качающейся щеки образуют горизонтальный ход S. Горизонтальный ход S1 при максимальном угле передачи меньше, чем горизонтальный ход S2 при минимальном угле передачи. Однако, F4 при максимальном угле передачи больше, чем F'4 при минимальном угле передачи.
Для бόльшей эффективности ход разгрузки может быть задан максимальным. Хотя это является благоприятным для разгрузки материалов, горизонтальное дробящее усилие находится в состоянии максимального эффекта уменьшения усилия, что очень негативно сказывается на дроблении. Это представляет собой несоответствие. То есть, когда способность дробления является высокой, способность разгрузки материала является низкой; и когда способность разгрузки материала является высокой, способность дробления является низкой.
Так как щековая дробилка была разработана, множество усовершенствований и новшеств были достигнуты, и большое количество изобретений и патентов на полезную модель были опубликованы. Но вышеприведенные недостатки не были решены. Например, в китайском патенте ZL 021305668 сопротивление износу частей улучшено и регулирование легче, но проблема эффекта уменьшения усилия не решена.
В китайском патенте ZL 200810043629 распорный элемент заменен рычажным стержнем. Только конструкция и силовые состояния изменяются. А несоответствие дробящего усилия и разгрузки по-прежнему существует.
Вкратце, перемещение нижнего участка качающейся щеки традиционной щековой дробилки, главным образом, устанавливается на разгрузку. Следовательно, перемещение нижнего участка качающейся щеки представляет собой ход разгрузки материала, нежели чем ход дробления материала. Хотя с небольшим дробящим эффектом, который является довольно небольшим, потеря энергии является очень большой (вследствие эффекта уменьшения усилия). Это представляет собой недостатки и недоработки традиционной щековой дробилки.
Механические характеристики кривошипно-коромыслового механизма традиционной щековой дробилки определяют, что работа и разгрузка нижнего участка качающейся щеки не являются совместимыми друг с другом. Для гарантирования определенной эффективности угол передачи будет задаваться минимальным. Это приводит к:
А) эффект уменьшения усилия является максимальным и функция дробления значительно ограничивается; и даже заклинивание будет иметь место, что может серьезно уменьшить эффект дробления (и поэтому щековая дробилка представляет собой дробилку для грубого дробления),
В) эффект уменьшения усилия вызывает потерю энергии, что уменьшает эффективность дробления или экономическую эффективность.
Задачей настоящего изобретения является обеспечение щековой дробилки с двойным кривошипно-коромысловым механизмом для преодоления недостатка традиционной щековой дробилки, заключающегося в том, что только разгрузка материалов является главной целью, причем щековая дробилка добавляет функцию разгрузки к функции дробления, обеспечивает перемещение нижнего участка качающейся щеки, которое представляет собой не только увеличивающий усилие ход дробления, но также большой ход разгрузки, решает несоответствие между разгрузкой и дроблением традиционной щековой дробилки и обеспечивает функцию вторичного дробления.
Соответственно для достижения вышеприведенной задачи настоящее изобретение обеспечивает щековую дробилку с двойным кривошипно-коромысловым механизмом, содержащую раму; неподвижную плиту щеки; подвижную плиту щеки; кривошипно-коромысловое устройство и ведущее колесо; причем неподвижная плита щеки смонтирована на раме, подвижная плита щеки смонтирована на кривошипно-коромысловом устройстве, кривошипно-коромысловое устройство обеспечено на раме и соединено с ведущим колесом; причем кривошипно-коромысловое устройство содержит передний кривошипно-коромысловый механизм и задний кривошипно-коромысловый механизм; причем передний кривошипно-коромысловый механизм содержит переднюю качающуюся щеку и передний распорный элемент; причем задний кривошипно-коромысловый механизм содержит заднюю качающуюся щеку и задний распорный элемент; причем передняя качающаяся щека и задняя качающаяся щека соединены с эксцентриковым приводным механизмом, эксцентриковый приводной механизм соединен с ведущим колесом; первый конец переднего распорного элемента шарнирно соединен с нижней задней частью передней качающейся щеки, второй конец переднего распорного элемента шарнирно соединен с нижней передней частью задней качающейся щеки; первый конец заднего распорного элемента шарнирно соединен с нижней задней частью задней качающейся щеки, второй конец заднего распорного элемента шарнирно соединен с рамой; подвижная плита щеки смонтирована на передней качающейся щеке и является соответствующей неподвижной плите щеки для образования камеры дробления.
Щековая дробилка в соответствии с настоящим изобретением содержит два полных и независимых кривошипно-коромысловых механизма, причем
А) в переднем кривошипно-коромысловом механизме эксцентриковый приводной механизм представляет собой кривошип, передняя качающаяся щека представляет собой шатун и передний распорный элемент представляет собой коромысло; и
В) в заднем кривошипно-коромысловом механизме, эксцентриковый приводной механизм представляет собой кривошип, задняя качающаяся щека представляет собой шатун и задний распорный элемент представляет собой коромысло.
Передний кривошипно-коромысловый механизм взаимодействует с задним кривошипно-коромысловым механизмом для нарушения и оттягивания назад точки шарнирного соединения переднего распорного элемента и рамы. Задний кривошипно-коромысловый механизм вставляется. Нижняя задняя часть задней качающейся щеки шарнирно соединена с передним распорным элементом. Задний распорный элемент шарнирно соединен с рамой. Так как передний эксцентриковый приводной механизм и задний эксцентриковый приводной механизм вращаются синхронно посредством одного и того же вала или ведущего колеса, образуется двойной кривошипно-коромысловый механизм.
Двойной кривошипно-коромысловый механизм изменяет состояние нижней части традиционной качающейся щеки из эффекта уменьшения усилия на эффект увеличения усилия. Анализ усилия изложен ниже:
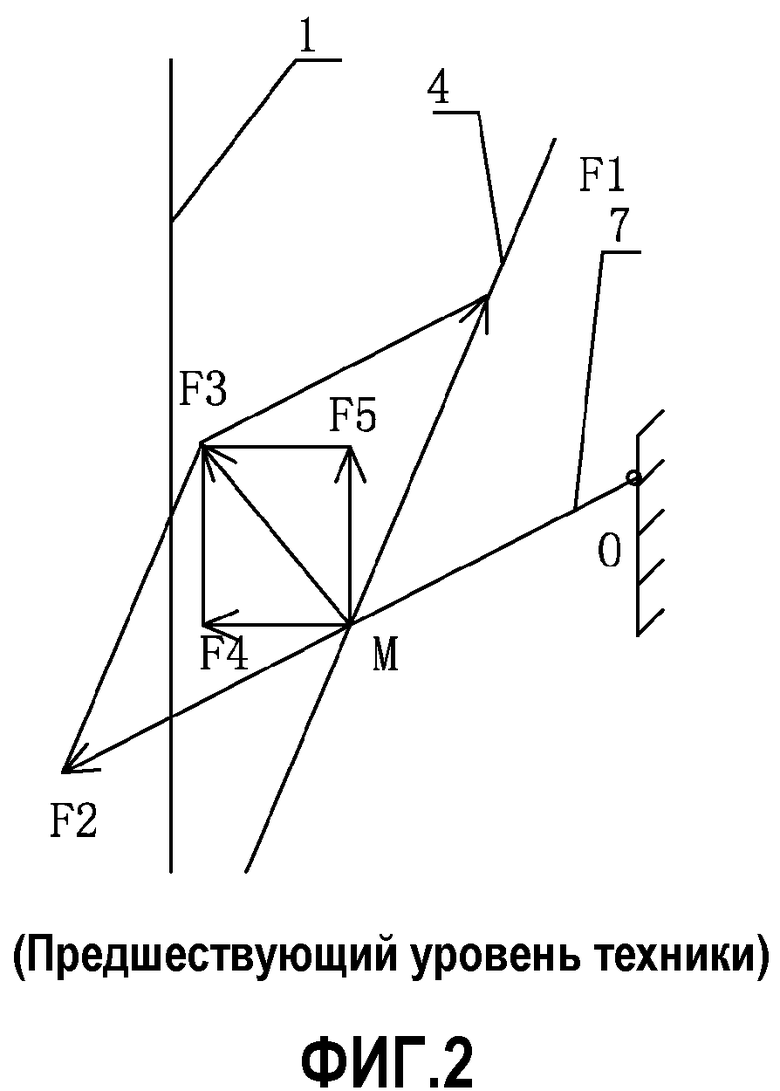
А) анализ усилия традиционной качающейся щеки показан на фиг.2 чертежей, причем растягивающее усилие F1 качающейся щеки и осевое усилие F2 переднего распорного элемента образуют составное усилие F3. F3 можно разложить на вертикальное усилие F5 и горизонтальное усилие F4, причем F4 представляет собой эффективное дробящее усилие. Очевидно, F4 гораздо меньше, чем F1. Следовательно, перемещение нижнего участка качающейся щеки всегда находится в состоянии эффекта уменьшения усилия, и
В) анализ усилия нижнего участка качающейся щеки в соответствии с настоящим изобретением показан на фиг.9 чертежей, причем для удобного анализа и сравнения задний распорный элемент удален, и только передний распорный элемент анализируется (результаты которого являются такими же, как у заднего распорного элемента). Так как конец заднего распорного элемента шарнирно соединен с рамой (что также называется относительным монтажом), линия АВ на фиг.9, приблизительно рассматривается как прямой путь (который в действительности представляет собой кривую) для побуждения начала координат перемещаться вверх и вниз. В соответствии с механическим принцип (правилом параллелограмма) растягивающее усилие F6 качающейся щеки и осевое усилие F7 пути АВ образуют составное усилие F8. F8 можно разложить на вертикальное усилие F9 и горизонтальное усилие F10, причем F9 представляет собой эффективное дробящее усилие. F10 равно F6 по величине. Очевидно, F9 больше, чем F6. Следовательно, перемещение нижнего участка качающейся щеки всегда находится в состоянии эффекта увеличения усилия (так как угол β является большим).
Вышеприведенные результаты показывают, что с двойным кривошипно-коромысловым механизмом небольшое усилие на задней качающейся щеке будет приводить к большому (горизонтальному) дробящему усилию на нижней части передней качающейся щеки. Чем выше задняя качающаяся щека (что означает, что β больше), тем больше дробящее усилие будет увеличиваться. Эта характеристика является хорошо подходящей для реального использования: причем с каждым последующим ходом дробления материалы становятся более мелкими и требуется бόльшее дробящее усилие. Если дробящее усилие является достаточно большим, эффективность дробления будет наилучшей.
Конструкция кривошипно-коромыслового механизма изменяется на конструкцию двойного кривошипно-коромыслового механизма, что является ключевой особенностью и конструктивной характеристикой настоящего изобретения.
Неочевидная функциональная характеристика настоящего изобретения заключается в том, что ограничения традиционной щековой дробилки с составным маятником вследствие одного кривошипно-коромыслового механизма исключены; передний и задний кривошипно-коромысловые механизмы используются для изменения механических характеристик конструкции нижней части передней качающейся щеки и эффект уменьшения усилия заменяется эффектом увеличения усилия для значительного улучшения функциональных возможностей щековой дробилки.
Конструкция щековой дробилки изменена с традиционного кривошипно-коромыслового механизма на двойной кривошипно-коромысловый механизм, что является революционным прорывом в истории разработки щековой дробилки.
Базовой технологией настоящего изобретения является изменение эффекта уменьшения усилия нижней части щековой дробилки на эффект увеличения усилия посредством двойного кривошипно-коромыслового механизма для изменения хода разгрузки (ссылаясь на горизонтальное перемещение нижней части качающейся щеки) на ход дробления, причем разгрузка естественным образом обеспечивается в процессе дробления (что означает, что процесс представляет собой ход дробления, а также ход разгрузки). Передний кривошипно-коромысловый механизм предназначен, главным образом, для обеспечения дробления на верхней части передней качающейся щеки, задний кривошипно-коромысловый механизм предназначен, главным образом, для обеспечения дробления и разгрузки на нижней части передней качающейся щеки. Следовательно, щековая дробилка имеет функцию, эквивалентную вторичному дроблению.
Эксцентриковый приводной механизм может быть выполнен в виде одноосной конструкции или двухосной конструкции: т.е. эксцентриковый приводной механизм может иметь конструкцию с одним эксцентриковым ведущим валом или с двойными эксцентриковыми валами.
Предпочтительно эксцентриковый приводной механизм представляет собой приводную конструкцию с одним эксцентриковым валом, содержащую эксцентриковый ведущий вал, причем передняя качающаяся щека и задняя качающаяся щека шарнирно соединены с эксцентриковым ведущим валом, эксцентриковый ведущий вал соединен с ведущим колесом; причем эксцентриковый ведущий вал содержит закрывающий элемент вала и стержень эксцентрикового вала; причем передняя качающаяся щека соединена с закрывающим элементом вала, камера обеспечена посередине закрывающего элемента вала, где соединяется стержень эксцентрикового вала, подшипниковая втулка обеспечена на стержне эксцентрикового вала в камере, задняя качающаяся щека соединена с подшипниковой втулкой; отверстие обеспечено на закрывающем элементе вала, и задняя качающаяся щека является способной проходить и качаться через отверстие.
С вышеприведенной конструкцией образуется щековая дробилка с одноосным двойным кривошипно-коромысловым механизмом.
В соответствии с настоящим изобретением камера, образованная посредством закрывающего элемента вала и стержня эксцентрикового вала традиционной конструкции, используется надлежащим образом. Подшипниковая втулка обеспечена на стержне эксцентрикового вала в камере для обеспечения функции двойного эксцентрикового привода таким образом, что два ряда кривошипно-коромысловых конструкций могут приводиться в движение, стоимость может быть уменьшена, а эффективность может быть повышена.
Кроме того, отверстие обеспечено на закрывающем элементе вала, и задняя качающаяся щека является способной проходить и качаться через отверстие. С вышеприведенной конструкцией двойная кривошипно-коромысловая конструкция может быть упрощена, что является благоприятным для улучшения традиционных щековых дробилок, способствования характеристикам продукта и сохранения ресурсов.
Предпочтительно эксцентриковый ведущий вал представляет собой самобалансирующийся эксцентриковый вал, соединительный ограничитель обеспечен посередине эксцентрикового ведущего вала, подшипниковая втулка задней качающейся щеки размещена вокруг соединительного ограничителя; эксцентриковые подшипниковые ограничители, концентрические подшипниковые ограничители, блокирующие ограничители и эталонные ограничители одинаково обеспечены с двух сторон соединительного ограничителя; первый закрывающий элемент вала и второй закрывающий элемент вала обеспечены на передней качающейся щеке и соответствующим образом соединены с эксцентриковыми подшипниковыми ограничителями; концентрические подшипниковые ограничители эксцентрикового ведущего вала смонтированы на раме; ведущее колесо размещено вокруг эталонных ограничителей; оси концентрических подшипниковых ограничителей, блокирующих ограничителей и эталонных ограничителей совпадают с осью вращения всего вала, оси эксцентриковых подшипниковых ограничителей совпадают с эксцентриковой осью всего вала; центр масс соединительного ограничителя обеспечен на противоположной стороне эксцентрикового центра эксцентрикового подшипникового ограничителя, и эксцентриковый момент соединительного ограничителя равен эксцентриковому моменту эксцентрикового подшипникового ограничителя. Ось соединительного ограничителя эксцентрикового вала сохраняется (или находится на одной линии с осью вращения) таким образом, чтобы быть противоположной относительно оси подшипникового ограничителя эксцентрикового вала. Посредством баланса обратного эксцентрикового момента инерции обеспечена функция самобалансировки.
Предпочтительно эксцентриковый приводной механизм представляет собой приводную конструкцию с двойным эксцентриковым валом, содержащую передний эксцентриковый ведущий вал и задний эксцентриковый ведущий вал; причем передняя качающаяся щека соединена с передним эксцентриковым ведущим валом, задняя качающаяся щека соединена с задним эксцентриковым ведущим валом, передний эксцентриковый ведущий вал и задний эксцентриковый ведущий вал соответствующим образом соединены с ведущим колесом.
Ведущее колесо содержит переднее ведущее зубчатое колесо и
заднее ведущее зубчатое колесо;
причем переднее ведущее зубчатое колесо зацепляется с задним ведущим зубчатым колесом, передний эксцентриковый ведущий вал соединен с передним ведущим зубчатым колесом, задний эксцентриковый ведущий вал соединен с задним ведущим зубчатым колесом.
С вышеприведенной конструкцией образуется щековая дробилка с двухосным двойным кривошипно-коромысловым механизмом.
Двойной кривошипно-коромысловый механизм перенимает все преимущества двух ведущих колес. Два ведущих колеса зацепляются друг с другом и вращаются синхронно. Вышеприведенная конструкция имеет следующие преимущества:
А) посредством выбора разных радиусов зубчатых колес для двух зубчатых колес, различные соотношения скоростей (двух эксцентриковых ведущих валов) могут обеспечиваться для щековой дробилки, что может обеспечить щековые дробилки с разными функциями,
В) фазовые углы двух эксцентриковых приводов могут легко регулироваться (посредством вытягивания одного из ведущих зубчатых колес, изменения угла и толкания обратно) для множества функций, и
С) задняя качающаяся щека может быть обеспечена вертикально для образования конструкции с наилучшим эффектом увеличения усилия посредством переднего и заднего распорных элементов. То есть небольшое направленное вверх усилие на задней качающейся щеке будет приводить к увеличенному усилию на передней качающейся щеке для увеличения способности дробления.
С вышеприведенными предпочтительными вариантами осуществления синхронное приведение в движение может быть обеспечено посредством синхронной машины и системы числового программного управления таким образом, что два ведущих зубчатых колеса вращаются синхронно.
Предпочтительно передний эксцентриковый ведущий вал имеет такую же конструкцию, как у заднего эксцентрикового ведущего вала, передний эксцентриковый ведущий вал и задний эксцентриковый ведущий вал представляют собой самобалансирующиеся эксцентриковые валы, соединительные ограничители обеспечены посередине эксцентриковых ведущих валов; эксцентриковые подшипниковые ограничители, концентрические подшипниковые ограничители, блокирующие ограничители и эталонные ограничители одинаково обеспечены с двух сторон соединительного ограничителя; передняя качающаяся щека соединена с эксцентриковыми подшипниковыми ограничителями переднего эксцентрикового ведущего вала, задняя качающаяся щека соединена с эксцентриковыми подшипниковыми ограничителями заднего эксцентрикового ведущего вала; концентрические подшипниковые ограничители эксцентриковых ведущих валов смонтированы на раме; переднее ведущее зубчатое колесо размещено вокруг эталонных ограничителей переднего эксцентрикового ведущего вала, заднее ведущее зубчатое колесо размещено вокруг эталонных ограничителей заднего эксцентрикового ведущего вала; оси концентрических подшипниковых ограничителей, блокирующих ограничителей и эталонных ограничителей совпадают с осью вращения всего вала, оси эксцентриковых подшипниковых ограничителей совпадают с эксцентриковой осью всего вала; центр масс соединительного ограничителя обеспечен на противоположной стороне эксцентрикового центра эксцентрикового подшипникового ограничителя и эксцентриковый момент соединительного ограничителя равен эксцентриковому моменту эксцентрикового подшипникового ограничителя.
Ось соединительного ограничителя эксцентрикового вала сохраняется (или находится на одной линии с осью вращения) таким образом, чтобы быть противоположной относительно оси подшипникового ограничителя эксцентрикового вала. Посредством баланса обратного эксцентрикового момента инерции обеспечена функция самобалансировки. С вышеприведенной конструкцией щековая дробилка в соответствии с настоящим изобретением имеет следующее преимущество:
А) упрощенную конструкцию для дробления, в которой не нужны противовесы маховика и производственные затраты уменьшаются; в качестве результата затраты на эксплуатацию уменьшаются;
В) сохранение энергии, причем два энергопотребляющих фактора исключены, и эффективность работы повышена, так как обеспечена функция самобалансировки, не нужны противовесы маховика; и
С) улучшенная точность баланса вибрации щековой дробилки, причем только эксцентриковый вал должен тестироваться вследствие точной конструкции и изготовления самобалансирующегося эксцентрикового вала; щековую дробилку не требуется тестировать и может легко точно настраиваться.
Предпочтительно регулировочный болт обеспечен на раме. Регулировочный болт соединен с задним распорным элементом. Посредством манипулирования регулировочным болтом для регулирования двойного кривошипно-коромыслового механизма механизм может работать в более полной мере.
Предпочтительно соединительная тяга соединена с передней качающейся щекой. Соединительная тяга соединена с рамой через посредство буферной пружины для образования буферного устройства таким образом, что инерция распорного элемента уменьшается, и способность дробления обеспечивается в полной мере.
Следовательно, ограничения традиционной щековой дробилки с составным маятником вследствие одного кривошипно-коромыслового механизма исключены. Передний и задний кривошипно-коромысловые механизмы используются для изменения механических характеристик конструкции нижней части передней качающейся щеки. И эффект уменьшения усилия заменен эффектом увеличения усилия. Несоответствие между разгрузкой и дроблением исключено таким образом, что щековая дробилка имеет функцию вторичного дробления. Степень дробления увеличивается для дробления более мелко и равномерно. Более того, эффективность щековой дробилки значительно повышена.
Эти и другие задачи, признаки и преимущества настоящего изобретения станут очевидными из нижеследующего подробного описания, сопровождающих чертежей и прилагаемой формулы изобретения. На чертежах изображено:
Фиг.1 представляет собой схематичный вид щековой дробилки в соответствии с предшествующим уровнем техники.
Фиг.2 представляет собой анализ усилия нижней части качающейся щеки щековой дробилки в соответствии с предшествующим уровнем техники.
Фиг.3 представляет собой схематичный вид состояния хода, когда угол вращения является большим, в соответствии с предшествующим уровнем техники.
Фиг.4 представляет собой анализ усилия щековой дробилки на фиг.3 в соответствии с предшествующим уровнем техники.
Фиг.5 представляет собой схематичный вид состояния хода, когда угол вращения является небольшим, в соответствии с предшествующим уровнем техники.
Фиг.6 представляет собой анализ усилия щековой дробилки на фиг.5 в соответствии с предшествующим уровнем техники.
Фиг.7 представляет собой схематичный вид конструкции щековой дробилки в соответствии с настоящим изобретением.
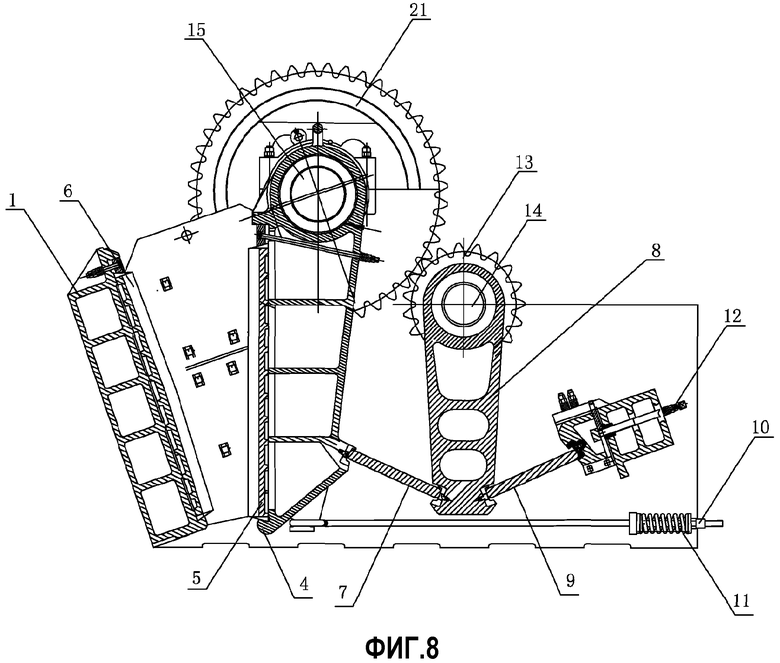
Фиг.8 представляет собой схематичный вид другой конструкции щековой дробилки в соответствии с настоящим изобретением.
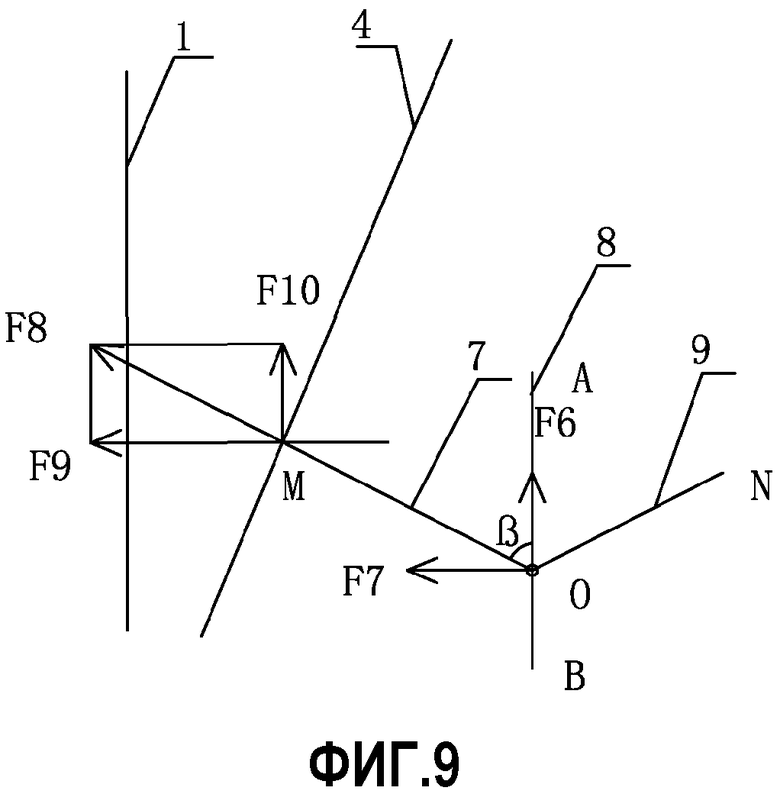
Фиг.9 представляет собой анализ усилия нижней части качающейся щеки щековой дробилки в соответствии с настоящим изобретением.
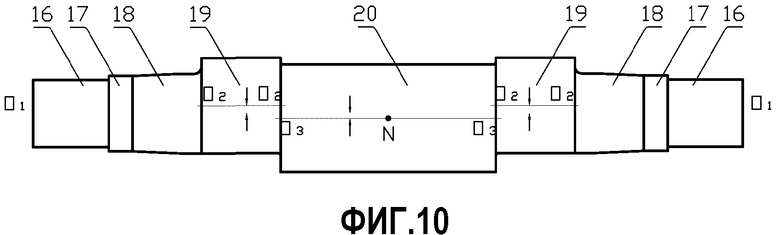
Фиг.10 представляет собой схематичный вид эксцентрикового ведущего вала в соответствии с настоящим изобретением.
Ссылаясь на чертежи, щековые дробилки в соответствии с предпочтительными вариантами осуществления настоящего изобретения дополнительно показаны.
Предпочтительный вариант осуществления 1
Ссылаясь на фиг.7 чертежей, показана щековая дробилка с двойным кривошипно-коромысловым механизмом, содержащая раму 1; неподвижную плиту 6 щеки; подвижную плиту 5 щеки; передний кривошипно-коромысловый механизм; задний кривошипно-коромысловый механизм и ведущее колесо 2; причем передний кривошипно-коромысловый механизм содержит переднюю качающуюся щеку 4 и передний распорный элемент 7; причем задний кривошипно-коромысловый механизм содержит заднюю качающуюся щеку 8 и задний распорный элемент 9.
Эксцентриковый ведущий вал 3 обеспечен на раме 1 и соединен с ведущим колесом 2, содержащим закрывающий элемент 31 вала и
стержень 32 эксцентрикового вала; причем камера 34 обеспечена посередине закрывающего элемента 31 вала, где соединяется стержень 32 эксцентрикового вала, подшипниковая втулка 33 обеспечена на стержне 32 эксцентрикового вала в камере 34.
Передняя качающаяся щека 4 и задняя качающаяся щека 8 шарнирно соединены с эксцентриковым ведущим валом 3. Передняя качающаяся щека 4 соединена с закрывающим элементом 31 вала. Задняя качающаяся щека 8 соединена с подшипниковой втулкой 33. Отверстие 35 обеспечено на закрывающем элементе 31 вала таким образом, что задняя качающаяся щека 8 является способной проходить и качаться через отверстие 35. Первый конец переднего распорного элемента 7 шарнирно соединен с нижней задней частью передней качающейся щеки 4. Второй конец переднего распорного элемента 7 шарнирно соединен с нижней передней частью задней качающейся щеки 8. Первый конец заднего распорного элемента 9 шарнирно соединен с нижней задней частью задней качающейся щеки 8, второй конец заднего распорного элемента 9 шарнирно соединен с рамой 1.
Подвижная плита 5 щеки смонтирована на передней качающейся щеке 4. Неподвижная плита 6 щеки смонтирована на раме 1. Регулировочный болт 12 обеспечен на раме 1. Регулировочный болт 12 соединен с задним распорным элементом 9. Соединительная тяга 10 соединена с нижней задней частью передней качающейся щеки 4. Соединительная тяга 10 соединена с рамой 1 посредством буферной пружины 11.
Ссылаясь на фиг.10 чертежей, эксцентриковый ведущий вал 3 представляет собой самобалансирующийся эксцентриковый вал, причем эксцентриковые подшипниковые ограничители 19, концентрические подшипниковые ограничители 18, блокирующие ограничители 17 и эталонные ограничители 16 одинаково обеспечены с двух сторон соединительного ограничителя 20. Оси концентрических подшипниковых ограничителей 18, блокирующих ограничителей 17 и эталонных ограничителей 16 совпадают с осью O1-O1 вращения всего вала. Оси эксцентриковых подшипниковых ограничителей 19 совпадают с эксцентриковой осью O2-O2 всего вала. Ось соединительного ограничителя 20 обеспечена на противоположной стороне эксцентрикового центра эксцентрикового подшипникового ограничителя 19 исходя из оси O1-O1 вращения. То есть центр N масс соединительного ограничителя 20 совпадает с эксцентриковой осью O3-O3. Эксцентриковый момент соединительного ограничителя 20 равен эксцентриковому моменту эксцентрикового подшипникового ограничителя 19 по величине с противоположными направлениями. Первый закрывающий элемент вала и второй закрывающий элемент вала обеспечены на передней качающейся щеке 4 и соответствующим образом соединены с эксцентриковыми подшипниковыми ограничителями 19. Подшипниковая втулка 33 задней качающейся щеки 8 размещена вокруг соединительного ограничителя 20. Концентрические подшипниковые ограничители 19 эксцентрикового ведущего вала 3 смонтированы на раме 1. Ведущее колесо 2 размещено вокруг эталонных ограничителей 16.
Ссылаясь на фиг.9 чертежей, для удобного анализа и сравнения задний распорный элемент 9 удален, и только передний распорный элемент 7 анализируется (результаты которого являются такими же, как у заднего распорного элемента 9). Так как конец заднего распорного элемента 9 шарнирно соединен с рамой 1 (что также называется относительным монтажом), линия АВ на фиг.9 приблизительно рассматривается как прямой путь (который в действительности представляет собой кривую) для побуждения начала координат перемещаться вверх и вниз. В соответствии с механическим принципом (правилом параллелограмма) растягивающее усилие F6 качающейся щеки и осевое усилие F7 пути АВ образуют составное усилие F8. F8 можно разложить на вертикальное усилие F9 и горизонтальное усилие F10, причем F9 представляет собой эффективное дробящее усилие. F10 равно F6 по величине. Очевидно F9 больше, чем F6. Следовательно, перемещение нижнего участка качающейся щеки всегда находится в состоянии эффекта увеличения усилия (так как угол β является большим). Вышеприведенные результаты показывают, что с двойным кривошипно-коромысловым механизмом небольшое усилие на задней качающейся щеке 8 будет приводить к большому дробящему усилию на нижней части передней качающейся щеки 4. Чем выше задняя качающаяся щека (что означает, что β больше), тем больше дробящее усилие будет увеличиваться. Эта характеристика является хорошо подходящей для реального использования: причем с каждым последующим ходом дробления материалы становятся более мелкими и требуется бόльшее дробящее усилие. Если дробящее усилие является достаточно большим, эффективность дробления будет наилучшей.
Применение.
Щековая дробилка в соответствии с настоящим изобретением содержит два полных и индивидуальных кривошипно-коромысловых механизма, причем:
А) в переднем кривошипно-коромысловом механизме эксцентриковый приводной вал 3 представляет собой кривошип, передняя качающаяся щека 4 представляет собой шатун и передний распорный элемент 7 представляет собой коромысло; и
В) в заднем кривошипно-коромысловом механизме, эксцентриковый приводной вал 3 представляет собой кривошип, задняя качающаяся щека 8 представляет собой шатун и задний распорный элемент 9 представляет собой коромысло.
Передний кривошипно-коромысловый механизм и задний кривошипно-коромысловый механизм обеспечены на одном и том же эксцентриковом ведущем валу 3 и взаимодействуют друг с другом для нарушения (или оттягивания назад) точки шарнирного соединения переднего распорного элемента 7 и рамы 1. Задний кривошипно-коромысловый механизм вставляется. Нижняя задняя часть задней качающейся щеки 8 шарнирно соединена с передним распорным элементом 7. Задний распорный элемент 9 шарнирно соединен с рамой 1. Следовательно, образуется щековая дробилка с двойным кривошипно-коромысловым механизмом.
Предпочтительный вариант осуществления 2
Ссылаясь на фиг.8 чертежей, показана щековая дробилка с двойным кривошипно-коромысловым механизмом, содержащая раму 1; неподвижную плиту 6 щеки; подвижную плиту 5 щеки; передний кривошипно-коромысловый механизм; задний кривошипно-коромысловый механизм и ведущее колесо 2; причем ведущее колесо 2 содержит переднее ведущее зубчатое колесо 21 и заднее ведущее зубчатое колесо 13; причем переднее ведущее зубчатое колесо 21 зацепляется с задним ведущим зубчатым колесом 13.
Передний кривошипно-коромысловый механизм содержитпереднюю качающуюся щеку 4; передний распорный элемент 7 и передний эксцентриковый ведущий вал 15. Задний кривошипно-коромысловый механизм содержит заднюю качающуюся щеку 8; задний распорный элемент 9 и задний эксцентриковый ведущий вал 14.
Передняя качающаяся щека 4 шарнирно соединена с передним эксцентриковым ведущим валом 15. Задняя качающаяся щека 8 шарнирно соединена с задним эксцентриковым ведущим валом 14. Передний эксцентриковый ведущий вал 15 соединен с ведущим колесом 2. Задний эксцентриковый ведущий вал 14 соединен с задним ведущим зубчатым колесом 13. Первый конец переднего распорного элемента 7 шарнирно соединен с нижней задней частью передней качающейся щеки 4. Второй конец переднего распорного элемента 7 шарнирно соединен с нижней передней частью задней качающейся щеки 8. Первый конец заднего распорного элемента 9 шарнирно соединен с нижней задней частью задней качающейся щеки 8, второй конец заднего распорного элемента 9 шарнирно соединен с рамой 1.
Ссылаясь на фиг.10 чертежей, передний эксцентриковый ведущий вал 15 и задний эксцентриковый ведущий вал 14 представляют собой самобалансирующиеся эксцентриковые валы, причем эксцентриковые подшипниковые ограничители 19, концентрические подшипниковые ограничители 18, блокирующие ограничители 17 и эталонные ограничители 16 одинаково обеспечены с двух сторон соединительного ограничителя 20. Оси концентрических подшипниковых ограничителей 18, блокирующих ограничителей 17 и эталонных ограничителей 16 совпадают с осью O1-O1 вращения всего вала. Оси эксцентриковых подшипниковых ограничителей 19 совпадают с эксцентриковой осью O2-O2 всего вала. Ось соединительного ограничителя 20 обеспечена на противоположной стороне эксцентрикового центра эксцентрикового подшипникового ограничителя 19 исходя из оси O1-O1 вращения. То есть центр N масс соединительного ограничителя 20 совпадает с эксцентриковой осью O3-O3. Эксцентриковый момент соединительного ограничителя 20 равен эксцентриковому моменту эксцентрикового подшипникового ограничителя 19 по величине с противоположными направлениями. Передняя качающаяся щека 4 соединена с эксцентриковыми подшипниковыми ограничителями 19 переднего эксцентрикового ведущего вала 15. Задняя качающаяся щека 8 соединена с эксцентриковыми подшипниковыми ограничителями 19 заднего эксцентрикового ведущего вала 14. Эксцентриковые подшипниковые ограничители 19 переднего эксцентрикового ведущего вала 15 и заднего эксцентрикового ведущего вала 14 смонтированы на раме. Переднее ведущее зубчатое колесо 21 размещено вокруг эталонных ограничителей 16 переднего эксцентрикового ведущего вала 15, заднее ведущее зубчатое колесо 13 размещено вокруг эталонных ограничителей 16 заднего эксцентрикового ведущего вала 14.
Подвижная плита 5 щеки смонтирована на передней качающейся щеке 4. Неподвижная плита 6 щеки смонтирована на раме 1. Регулировочный болт 12 обеспечен на раме 1. Регулировочный болт 12 соединен с задним распорным элементом 9. Соединительная тяга 10 соединена с нижней задней частью передней качающейся щеки 4. Соединительная тяга 10 соединена с рамой 1 посредством буферной пружины 11.
Применение.
Щековая дробилка в соответствии с настоящим изобретением содержит два полных и индивидуальных кривошипно-коромысловых механизма, причем:
А) в переднем кривошипно-коромысловом механизме передний эксцентриковый приводной вал 15 представляет собой кривошип, передняя качающаяся щека 4 представляет собой шатун и передний распорный элемент 7 представляет собой коромысло; и
В) в заднем кривошипно-коромысловом механизме задний эксцентриковый приводной вал 14 представляет собой кривошип, задняя качающаяся щека 8 представляет собой шатун и задний распорный элемент 9 представляет собой коромысло.
Передний кривошипно-коромысловый механизм взаимодействует с задним кривошипно-коромысловым механизмом для нарушения (или оттягивания назад) точки шарнирного соединения переднего распорного элемента 7 и рамы 1. Задний кривошипно-коромысловый механизм вставляется. Нижняя задняя часть задней качающейся щеки 8 шарнирно соединена с передним распорным элементом 7. Задний распорный элемент 9 шарнирно соединен с рамой 1. Так как передний эксцентриковый ведущий вал 15 и задний эксцентриковый ведущий вал 14 вращаются синхронно посредством одного и того же ведущего колеса, образуется щековая дробилка с двойным кривошипно-коромысловым механизмом.
Специалисту в данной области техники будет понятно, что вариант осуществления настоящего изобретения, как показан на чертежах и описан выше, является только иллюстративным и не подразумевается быть ограничивающим.
Таким образом, можно увидеть, что задачи настоящего изобретения были полностью и эффективно достигнуты. Его варианты осуществления были показаны и описаны для целей иллюстрирования функциональных и конструктивных принципов настоящего изобретения и могут изменяться, не отступая от таких принципов. Следовательно, настоящее изобретение включает в себя все модификации, подпадающие в пределы идеи и объема следующей формулы изобретения.
Ссылочные позиции элементов
1 - рама, 2 - ведущее колесо, 21 - переднее ведущее зубчатое колесо, 3 - эксцентриковый ведущий вал, 4 - передняя качающаяся щека, 5 - подвижная плита щеки, 6 - неподвижная плита щеки, 7 - передний распорный элемент, 8 - задняя качающаяся щека, 9 - задний распорный элемент, 10 - соединительная тяга, 11 - буферная пружина, 12 - регулировочный болт, 13 - заднее ведущее зубчатое колесо, 14 - задний эксцентриковый ведущий вал, 15 - передний эксцентриковый ведущий вал, 16 - стандартный ограничитель, 17 - блокирующий ограничитель, 18 - эксцентриковый подшипниковый ограничитель, 19 - концентрический подшипниковый ограничитель, 20 - соединительный ограничитель, 31 - закрывающий элемент вала, 32 - стержень эксцентрикового вала, 33 - подшипниковая втулка, 34 - камера, 35 - отверстие.
| название | год | авторы | номер документа |
|---|---|---|---|
| Лабораторная щековая дробилка | 1980 |
|
SU1131532A1 |
| Щековая дробилка | 1984 |
|
SU1197731A1 |
| ЩЕКОВАЯ ДРОБИЛКА | 2008 |
|
RU2380157C1 |
| ЩЕКОВАЯ ДРОБИЛКА | 2015 |
|
RU2601815C1 |
| Лабораторная щековая дробилка | 1988 |
|
SU1646596A1 |
| ЩЕКОВАЯ ДРОБИЛКА С ВЫСОКОЙ СТЕПЕНЬЮ ДРОБЛЕНИЯ | 2011 |
|
RU2458740C1 |
| САМОБАЛАНСНАЯ ВИБРОЩЕКОВАЯ ДРОБИЛКА | 1995 |
|
RU2097131C1 |
| Щековая дробилка | 1979 |
|
SU844040A1 |
| ДРОБИЛКА ЩЕКОВАЯ НЕПРЕРЫВНОГО ДЕЙСТВИЯ | 2003 |
|
RU2246350C1 |
| Щековая дробилка | 1988 |
|
SU1583164A1 |

Изобретение относится к щековой дробилке с двойным кривошипно-коромысловым механизмом. Щековая дробилка содержит раму (1) с неподвижной плитой щеки (5), кривошипно-коромысловое устройство с подвижной (6) плитой щеки и ведущее колесо (2). Кривошипно-коромысловое устройство с передним и задним механизмами выполнено на раме и соединено с ведущим колесом. Передний и задний кривошипно-коромысловые механизмы содержат переднюю (4) и заднюю (8) качающиеся щеки и передний (7) и задний (9) распорные элементы соответственно. Подвижная плита расположена на передней щеке и образует с неподвижной плитой камеру дробления. Эксцентриковый приводной механизм представляет собой приводную конструкцию с одним эксцентриковым ведущим валом (3). Вал соединен с ведущим колесом и шарнирно соединен с передней и задней щеками. Вал содержит закрывающий элемент (31) и стержень (32). Передняя щека соединена с закрывающим элементом вала. Камера выполнена посередине закрывающего элемента вала в месте присоединения стержня вала. Подшипниковая втулка (33) выполнена на стержне вала в камере (34). Задняя щека соединена со втулкой и выполнена с возможностью прохождения и качания через отверстие (35) на закрывающем элементе вала. Первый и второй концы переднего распорного элемента шарнирно соединены с нижней задней частью передней щеки и передней частью задней щеки соответственно. Первый и второй концы заднего распорного элемента шарнирно соединены с нижней задней частью задней качающейся щеки и рамой соответственно. Изобретение обеспечивает функцию вторичного дробления. 4 з.п. ф-лы, 10 ил.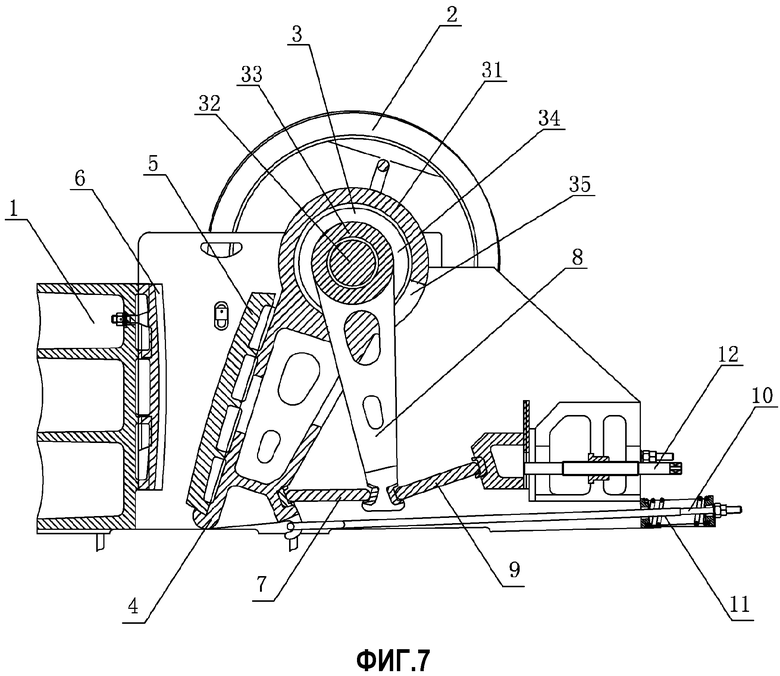
1. Щековая дробилка с двойным кривошипно-коромысловым механизмом, содержащая раму, неподвижную плиту щеки, подвижную плиту щеки, кривошипно-коромысловое устройство и ведущее колесо, причем указанная неподвижная плита щеки установлена на раме, подвижная плита щеки расположена на кривошипно-коромысловом устройстве, при этом кривошипно-коромысловое устройство выполнено на раме и соединено с ведущим колесом, причем кривошипно-коромысловое устройство содержит передний кривошипно-коромысловый механизм и задний кривошипно-коромысловый механизм, при этом передний кривошипно-коромысловый механизм содержит переднюю качающуюся щеку и передний распорный элемент, при этом задний кривошипно-коромысловый механизм содержит заднюю качающуюся щеку и задний распорный элемент, при этом передняя качающаяся щека и задняя качающаяся щека соединены с эксцентриковым приводным механизмом, при этом эксцентриковый приводной механизм представляет собой приводную конструкцию с одним эксцентриковым валом, содержащую эксцентриковый ведущий вал, причем передняя качающаяся щека и задняя качающаяся щека шарнирно соединены с эксцентриковым ведущим валом, при этом эксцентриковый ведущий вал соединен с ведущим колесом, причем эксцентриковый ведущий вал содержит закрывающий элемент вала и стержень эксцентрикового вала, причем передняя качающаяся щека соединена с закрывающим элементом вала, камера выполнена посередине закрывающего элемента вала, где присоединен стержень эксцентрикового вала, подшипниковая втулка выполнена на стержне эксцентрикового вала в камере, при этом задняя качающаяся щека соединена с подшипниковой втулкой, отверстие выполнено на закрывающем элементе вала, и задняя качающаяся щека выполнена с возможностью прохождения и качания через указанное отверстие, при этом эксцентриковый приводной механизм соединен с ведущим колесом, первый конец переднего распорного элемента шарнирно соединен с нижней задней частью передней качающейся щеки, второй конец переднего распорного элемента шарнирно соединен с нижней передней частью задней качающейся щеки, первый конец заднего распорного элемента шарнирно соединен с нижней задней частью задней качающейся щеки, второй конец заднего распорного элемента шарнирно соединен с рамой, подвижная плита щеки расположена на передней качающейся щеке и является соответствующей неподвижной плите щеки для образования камеры дробления.
2. Щековая дробилка по п.1, в которой эксцентриковый ведущий вал представляет собой самобалансирующийся эксцентриковый вал, соединительный ограничитель выполнен посередине эксцентрикового ведущего вала, подшипниковая втулка задней качающейся щеки размещена вокруг соединительного ограничителя, эксцентриковые подшипниковые ограничители, концентрические подшипниковые ограничители, блокирующие ограничители и эталонные ограничители одинаково расположены с двух сторон соединительного ограничителя, первый закрывающий элемент вала и второй закрывающий элемент вала распложены на передней качающейся щеке и соответствующим образом соединены с эксцентриковыми подшипниковыми ограничителями, концентрические подшипниковые ограничители эксцентрикового ведущего вала установлены на раме, ведущее колесо размещено вокруг эталонных ограничителей, оси концентрических подшипниковых ограничителей, блокирующих ограничителей и эталонных ограничителей совпадают с осью вращения всего вала, оси эксцентриковых подшипниковых ограничителей совпадают с эксцентриковой осью всего вала, центр масс соединительного ограничителя выполнен на противоположной стороне эксцентрикового центра эксцентрикового подшипникового ограничителя, и эксцентриковый момент соединительного ограничителя равен эксцентриковому моменту эксцентрикового подшипникового ограничителя.
3. Щековая дробилка по п.1 или 2, в которой регулировочный болт расположен на раме, при этом регулировочный болт соединен с задним распорным элементом.
4. Щековая дробилка по п.1 или 2, в которой соединительная тяга соединена с нижней задней частью передней качающейся щеки, при этом соединительная тяга соединена с рамой посредством буферной пружины.
5. Щековая дробилка по п.3, в которой соединительная тяга соединена с нижней задней частью передней качающейся щеки, при этом соединительная тяга соединена с рамой посредством буферной пружины.
| Камнедробильная машина | 1952 |
|
SU106148A1 |
| DE 10206709 А1, 28.08.2003 | |||
| СПОСОБ ОСТЕОТОНОМЕТРИИ ПРИ ДЕГЕНЕРАТИВНЫХ И ВОСПАЛИТЕЛЬНЫХ ЗАБОЛЕВАНИЯХ ТАЗОБЕДРЕННОГО СУСТАВА | 2000 |
|
RU2184481C2 |
| Лабораторная дробилка | 1986 |
|
SU1450853A1 |
| МОКРЫЙ ГАЗООЧИСТИТЕЛЬHATEHTL-a-Т!;;Х|- | 0 |
|
SU251533A1 |
| Щековая дробилка | 1983 |
|
SU1168283A2 |

