Изобретение относится к железнодорожному транспорту и может быть использовано на электровозах, оборудованных аппаратурой системы контроля и дистанционного управления локомотивами по радиоканалу по режимам управления тормозами и тягой.
Известна система для управления локомотивом-толкачом по радиоканалу, содержащая на каждом локомотиве блок автоматики с подключенными к нему элементами управления передачей специализированных сообщений «опустить токоприемник» и «экстренное торможение», датчик давления воздуха в тормозной магистрали, реле для обесточивания электрических цепей управления тяговым режимом локомотива, средство контроля параметров управления тяговыми электродвигателями, модем, подключенный к радиостанции поездной связи, блок автоматики выполнен на базе процессора, реализующего программу обмена служебной информацией с установленной периодичностью между блоками автоматики головного и подталкивающего локомотива с выводом текстовых и символьных сообщений на знакосимвольный индикатор и дублированием поступивших команд и сообщений речевыми сообщениями через громкоговоритель, при этом к процессору подключены клавиатура, знакосимвольный индикатор, громкоговоритель и модуль регистрации, модем выполнен с функцией помехозащищенного кодирования и соединен с процессором через блок сопряжения, к первому, второму и третьему входам которого подключены соответственно датчик давления воздуха в тормозной магистрали, средство контроля параметров управления тяговыми электродвигателями и управляющий вход реле для обесточивания электрических цепей управления тяговым режимом локомотива (RU 76614 U1, В61С 17/12, 19.05.08).
Недостатком этой системы является отсутствие резервного радиоканала для передачи данных в случае невозможности работы на основном радиоканале или при следовании состава по тоннелю.
В качестве прототипа принята система для управления локомотивом-толкачом по радиоканалу с расширенными функциями, содержащая на головном и подталкивающем локомотиве блок автоматики, включающий процессор с подключенными к нему громкоговорителем и модулем регистрации и блок сопряжения, микропроцессорную систему управления локомотивом, датчик давления воздуха в тормозной магистрали поезда, соединенный с процессором через блок сопряжения, и радиостанцию поездной радиосвязи, подключенную к процессору через последовательно соединенные модем и блок сопряжения, на головном и подталкивающем локомотивах установлены радиомодемы метрового диапазона, включенные в основной радиоканал, при этом радиостанции поездной радиосвязи включены в резервный радиоканал, на каждом локомотиве радиомодем метрового диапазона подключен через блок сопряжения к процессору, который через блок сопряжения соединен с блоком индикации и ввода данных микропроцессорной системы управления локомотива, к входу и выходу которого подключены соответственно клавиатура и монитор, причем процессор головного локомотива обеспечивает передачу данных по основному каналу и подключение резервного канала связи для передачи данных в случае отсутствия подтверждения их получения со стороны подталкивающего локомотива не более двух раз подряд (RU 92636, В61С 17/12, 18.11.09).
Недостатками этой системы является невозможность автоматического ведения поезда без вмешательства машиниста в процессы управления тягой и торможения.
Техническим результатом предлагаемого изобретения является автоматизация системы управления поезда по радиоканалу по параметрам тяги, рекуперации и торможения локомотивов путем автоматической синхронизации параметров ведения головного с подталкивающего локомотивов и обратно.
Технический результат достигается тем, что в системе для контроля и управления локомотивом и подталкивающим локомотивом поезда по радиоканалу, содержащей на головном и подталкивающем локомотивах блок логической обработки, включающий модуль процессора с подключенными к нему модулем регистрации и модемом, соединенным с радиостанцией поездной радиосвязи, включенную в резервный радиоканал, блок сопряжения, радиомодем метрового диапазона, включенный в основной радиоканал и микропроцессорную систему управления локомотивом, согласно изобретению на головном и подталкивающем локомотивах введены модуль интерфейсов и контроллер, при этом к модулю интерфейсов подключены модуль процессора, радиомодем метрового диапазона и блок сопряжения, выполненный в виде модуля управления, соединенного с модулем электронных ключей, выходы которых подключены соответственно к устройству автоматического управления торможением и контроллеру, соединенному с контроллером крана машиниста, а к модулю интерфейсов подключена микропроцессорная система управления локомотивом, соединенная с локомотивным устройством безопасности и задатчиком скорости.
На чертеже представлена схема системы для контроля и управления локомотивом и подталкивающим локомотивом поезда по радиоканалу.
Система для контроля и управления локомотивом и подталкивающим локомотивом поезда по радиоканалу содержит на головном 1 и подталкивающем 2 локомотивах блок 3 логической обработки, включающий модуль 4 процессора с подключенными к нему модулем 5 регистрации и модемом 6, соединенным с радиостанцией 7 поездной радиосвязи, включенную в резервный радиоканал, блок 8 сопряжения, радиомодем 9 метрового диапазона, включенный в основной радиоканал и микропроцессорную систему 10 управления локомотивом, на головном 1 и подталкивающем 2 локомотивах введены модуль 11 интерфейсов и контроллер 12, к модулю 11 интерфейсов подключены модуль 4 процессора, радиомодем 9 метрового диапазона и блок 8 сопряжения, выполненный в виде модуля 13 управления, соединенного с модулем 14 электронных ключей, выходы которых подключены соответственно к устройству 15 автоматического управления торможением и контроллеру 12, соединенному с контроллером 16 крана машиниста, к модулю 11 интерфейсов подключена микропроцессорная система 10 управления локомотивом, соединенная с локомотивным устройством 17 безопасности и задатчиком 18 скорости.
Система для контроля и управления локомотивом и подталкивающим локомотивом поезда по радиоканалу работает следующим образом.
Автоматизация дистанционного управления по радиоканалу с головного локомотива на подталкивающий достигается реализацией синхронизацией по режимам торможения и тягой головного и подталкивающего локомотивов.
Управление тягой с ведущего локомотива
Величина задатчика скорости 18 на подталкивающем локомотиве устанавливается равной соответствующей величине на головном локомотиве путем передачи информации о повышении/понижении тока якоря от микропроцессорной системы 10 управления головного локомотива (МСУД-Н 10) через модуль интерфейсов 11 модулю процессора 4 блока 3 логической обработки локомотивного, обработанные модулем 4 процессора команды сохраняются на энергонезависимую память в регистраторе 5, после обработки модулем 4 процессора блока 3 логической обработки команды в виде сигналов передаются через модуль 11 интерфейсов на радиомодем 9 метрового диапазона в случае использования основного канала передачи данных и через модем 6 в радиостанцию 7 поездной радиосвязи в случае использования резервного канала связи гектометрового диапазона, по средствам действующего канала передачи данных команды передаются с головного 1 локомотива на подталкивающий 2, где при помощи радиомодема 9 через модуль интерфейсов 11 команды принимаются модулем 4 процессора в случае использования основного канала передачи данных и через радиостанцию 7 поездной радиосвязи, через модем 6 команды принимаются модулем 4 процессора, в случае использования резервного канала передачи данных, принятые команды сохраняются на энергонезависимую память в регистраторе 5, принятые команды обработанные модулем 4 процессора через модуль интерфейсов 11 передаются в систему МСУД-Н 10, которая реализует повышение/понижение тока якоря, что позволяет управлять тягой подталкивающего локомотива автоматически, устанавливая ток возбуждения, равный току возбуждения на головном локомотиве.
При поступлении информации из локомотивного устройства 17 безопасности (КЛУБ-У 17) о снижении давления в тормозной магистрали темпом служебного или экстренного торможения выполняется автоматическое снятие тяги на обоих локомотивах.
Управление торможением
При переводе на головном 1 локомотиве ручки крана машиниста в положение торможения контролер 12 системы для контроля и управления локомотивом и подталкивающим локомотивом поезда по радиоканалу фиксирует перемещение ручки крана 16 машиниста. Информация о смене режима торможения через модуль 14 электронных ключей передается в модуль 13 управления блока 8 сопряжения. Для формирования команд о смене режима торможения модулю 4 процессора используется модуль 11 интерфейсов. Обработанные модулем 4 процессора команды сохраняются на энергонезависимую память в регистраторе 5. После обработки модулем 4 процессора блока 3 логической обработки команды в виде сигналов передаются через модуль 11 интерфейсов на радиомодем 9 при использовании основного канала передачи данных и через модем 6 в радиостанцию 7 поездной радиосвязи при использовании резервного канала связи гектометрового диапазона. По средствам действующего канала передачи данных команды передаются с головного 1 локомотива на подталкивающий 2, где при помощи радиомодема 9 через модуль интерфейсов 11 команды принимаются модулем 4 процессора при использовании основного канала передачи данных и через радиостанцию 7, через модем 6 команды принимаются модулем 4 процессора при использовании резервного канала передачи данных. Принятые команды сохраняются на энергонезависимую память в регистраторе 5. Принятые команды обработанные модулем 4 процессора через модуль 11 интерфейсов передаются в модуль 13 управления блока 8 сопряжения, где формируется команды для устройства 15 автоматического торможения поездом (САУТ 15). Прием командных сообщений устройством 15 автоматического торможения поездом осуществляется через модуль 14 электронных ключей. Устройство 15 автоматического торможения поездом подталкивающего локомотива 2 реализует воздействие на тормозную магистраль в соответствии с принятыми по радиоканалу командами, переданными с головного локомотива.
При получении от устройства САУТ 15 команды ПЕРЕКРЫША на головном локомотиве 1 система для контроля и управления локомотивом и подталкивающим локомотивом поезда по радиоканалу должна автоматически установить режим ПЕРЕКРЫША на подталкивающем локомотиве 2.
При переходе устройства САУТ 15 в режим ОТПУСК на головном локомотиве 1 система для контроля и управления локомотивом и подталкивающим локомотивом поезда по радиоканалу автоматически установит режим «Отпуск» на подталкивающим локомотиве 2.
Выполнение режима «Отпуск» должно осуществляться со стороны головного локомотива 1 нажатием кнопки ОТПУСК на блоке индикации (не показано) микропроцессорной системы 10 управления головного локомотива 1 При получении команды «Отпуск» на подталкивающим локомотиве система должна выполнить полный отпуск автоматических тормозов. Через заданный интервал времени (ЗАДЕРЖКА ОТПУСКА) система для контроля и управления локомотивом и подталкивающим локомотивом поезда по радиоканалу на ведущем локомотиве должна выполнить полный отпуск автоматических тормозов.
Работа системы для контроля и управления локомотивом и подталкивающим локомотивом поезда по радиоканалу осуществляется как управлением подталкивающим локомотивом с головного, так и обратным порядком.
Система для контроля и управления локомотивом и подталкивающим локомотивом поезда по радиоканалу по сравнению с прототипом позволяет автоматизировать управление головного и подталкивающего локомотивов путем синхронизации по режимам торможения и тягой.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ТОРМОЗАМИ ПОЕЗДОВ ПОВЫШЕННОГО ВЕСА И ДЛИНЫ | 2012 |
|
RU2513878C2 |
| СИСТЕМА УПРАВЛЕНИЯ ТОРМОЗАМИ ПОЕЗДОВ ПОВЫШЕННОГО ВЕСА И ДЛИНЫ | 2008 |
|
RU2385247C1 |
| БЕЗОПАСНЫЙ ЛОКОМОТИВНЫЙ ОБЪЕДИНЕННЫЙ КОМПЛЕКС | 2011 |
|
RU2475396C1 |
| БЕЗОПАСНЫЙ ЛОКОМОТИВНЫЙ ОБЪЕДИНЕННЫЙ КОМПЛЕКС | 2011 |
|
RU2474507C2 |
| МНОГОУРОВНЕВАЯ СИСТЕМА УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДОВ ДЛЯ СОРТИРОВОЧНЫХ СТАНЦИЙ | 2009 |
|
RU2401217C1 |
| Система для управления движением поездов | 2021 |
|
RU2766016C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СОЕДИНЕННЫМИ ПОЕЗДАМИ ПО РАДИОКАНАЛУ | 2009 |
|
RU2398729C1 |
| Система автоматизированного управления движением поездов | 2022 |
|
RU2784101C1 |
| МНОГОУРОВНЕВАЯ СИСТЕМА УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДОВ ДЛЯ КРУПНЫХ ЖЕЛЕЗНОДОРОЖНЫХ СТАНЦИЙ | 2009 |
|
RU2403162C1 |
| СПОСОБ И СИСТЕМА РАСПРЕДЕЛЕННОГО УПРАВЛЕНИЯ ТОРМОЗАМИ ПОЕЗДОВ ПОВЫШЕННОЙ МАССЫ И ДЛИНЫ | 2014 |
|
RU2571000C2 |

Изобретение относится к области автоматики и телемеханики на железнодорожном транспорте. Система содержит на головном и подталкивающем локомотивах блок логической обработки, включающий модуль процессора с подключенными к нему модулем регистрации и модемом, соединенным с радиостанцией поездной радиосвязи, включенную в резервный радиоканал, блок сопряжения, радиомодем метрового диапазона, включенный в основной радиоканал и микропроцессорную систему управления локомотивом. Причем на головном и подталкивающем локомотивах введены модуль интерфейсов и контроллер, а к модулю интерфейсов подключены модуль процессора, радиомодем метрового диапазона и блок сопряжения, выполненный в виде модуля управления, соединенного с модулем электронных ключей, выходы которых подключены соответственно к устройству автоматического управления торможением и контроллеру, соединенному с контроллером крана машиниста, а к модулю интерфейсов подключена микропроцессорная система управления локомотивом, соединенная с локомотивным устройством безопасности и задатчиком скорости. Достигается повышение автоматизации системы управления поездом. 1 ил.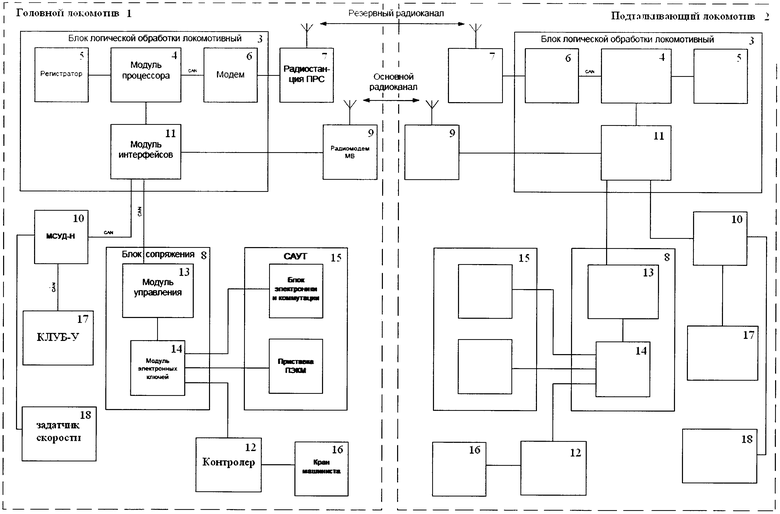
Система для контроля и управления локомотивом и подталкивающим локомотивом поезда по радиоканалу, содержащая на головном и подталкивающем локомотивах блок логической обработки, включающий модуль процессора с подключенными к нему модулем регистрации и модемом, соединенным с радиостанцией поездной радиосвязи, включенную в резервный радиоканал, блок сопряжения, радиомодем метрового диапазона, включенный в основной радиоканал и микропроцессорную систему управления локомотивом, отличающаяся тем, что на головном и подталкивающем локомотивах введены модуль интерфейсов и контроллер, при этом к модулю интерфейсов подключены модуль процессора, радиомодем метрового диапазона и блок сопряжения, выполненный в виде модуля управления, соединенного с модулем электронных ключей, выходы которых подключены соответственно к устройству автоматического управления торможением и контроллеру, соединенному с контроллером крана машиниста, а к модулю интерфейсов подключена микропроцессорная система управления локомотивом, соединенная с локомотивным устройством безопасности и задатчиком скорости.
| Соосная коническая зубчатая передача | 1950 |
|
SU92636A1 |
| 0 |
|
SU76614A1 | |
| US 5681015 A, 28.10.1997 | |||
| US 7455370 B2, 25.11.2008. | |||

