Изобретение относится к области железнодорожной автоматики, телемеханики и связи, может быть использовано на электровозах постоянного и переменного тока, эксплуатируемых в пассажирском, скоростном, высокоскоростном и грузовом движении поездов, магистральных и маневровых тепловозах, электропоездах, в том числе применяемых и для высокоскоростного движения, дизель-поездах и автомотрисах (рельсовых автобусах), а также в составе многоуровневых систем интервального регулирования.
Известно комплексное локомотивное устройство безопасности унифицированное, содержащее включенные в открытую систему реального времени с модульной архитектурой и соединенные между собой кабелем системного CAN-интерфейса блоки электроники, индикации, коммутации и ввода данных, расположенные в кабине машиниста, при этом блок электроники выполнен с возможностью определения допустимого скоростного режима и осуществления контроля за его соблюдением за счет фиксации сигналов обратной связи от рукоятки бдительности машиниста, внутреннего фонового тестирования каждого модуля, а также двухканальной обработки информации и включает в себя подключенные к системному CAN-интерфейсу два модуля центральной обработки информации, модуль маршрута, связанный со спутниковым приемником, оборудованным антенной спутниковой навигации, модуль цифрового радиоканала, связанный с радиомодемом, оборудованным радиоантенной, два модуля измерения параметров движения, связанных с колесными датчиками пути и скорости, два модуля внешних устройств, связанных с приемными катушками АЛСН и АЛС-ЕН, систему контроля безопасности и усилитель электропневматического клапана, связанный с электропневматическим клапаном, блок индикации выполнен с возможностью подготовки информации, необходимой машинисту, ее регистрации и индикации, взаимодействия с машинистом посредством рукоятки безопасности и кнопок ввода информации, введения и отображения локомотивных и поездных характеристик, текущего времени, фактической скорости и их сохранения при отключении электропитания и включает в себя модуль регистрации, модуль управления, связанный с рукояткой бдительности, и модуль индикации, блок коммутации выполнен с возможностью включения электропитания устройства, осуществления его связей с периферийной аппаратурой, а также переключения связей при изменении кабины управления локомотивом и включает в себя узел формирования данных о состоянии цепей управления локомотивом, связанный с датчиками давления тормозной магистрали (RU 2248899, B61L 25/04, 2003).
Недостатками этого устройства являются:
- отсутствие функции контроля несанкционированного отключения ключа электропневматического клапана, что приводит к неработоспособности устройства в случае отключения ключа машинистом;
- отсутствие функций служебного и принудительного торможения, не позволяющее осуществить плавную остановку, а только экстренную, что может привести к нанесению вреда здоровью машиниста и пассажиров, повышенному износу и повреждению подвижного состава, рельсовых путей и т.д.;
- отсутствие функции разрешения проезда запрещающего сигнала светофора по команде, полученной от модуля радиоканала и переданной с базовой станции, что может привести к длительным задержкам поездов, и как следствие, к повышению затрат на перевозки;
- отсутствие синхронизации данных о географических координатах, принимаемых приемником спутниковой навигации СНС, с поправками, принимаемыми модулем радиоканала от базовой станции, что приводит к снижению точности определения координат, и как следствие, к нарушению скоростных режимов работы;
- использование открытой системы реального времени, в частности системного интерфейса CAN, для связи системы безопасности движения с устройствами локомотива, что приводит к перегрузке общей информационной магистрали сообщениями, не используемыми для связи, между системой безопасности и устройствами локомотива.
Наиболее близким к заявленному изобретению является комплексное локомотивное устройство безопасности, содержащее включенные в закрытую систему реального времени с модульной архитектурой и соединенные между собой внутренним CAN интерфейсом блок электроники локомотивный, блок индикации локомотивный, блок коммутации и регистрации, блок регистрации, блок индикации скорости, блок индикации локомотивный помощника машиниста, блок согласования интерфейсов, шлюз, при этом блок электроники выполнен с возможностью приема и обработки сигналов от приемных катушек АЛСН и АЛС-ЕН, датчиков пути и скорости, антенны спутниковой навигационной системы, сигнала о положении ключа электропневматического клапана, сигналов от управляющих устройств локомотива, а также контроля и организации режима обмена информацией с другими устройствами с помощью внутреннего CAN интерфейса, организации режима обмена информацией с радиомодемом по цифровому интерфейсу и формирования сигнала управления электропневматическим клапаном, и включает в себя подключенные к внутреннему CAN интерфейсу двухканальный модуль центральной обработки, модуль электронной карты, модуль радиоканала, двухканальный модуль внешнего устройства и двухканальный модуль измерителя параметров движения, причем дополнительные входы/выходы модуля центральной обработки соединены с соответствующими входами/ выходами системы безопасности, выход которой соединен с усилителем электропневматического клапана, связанного с электропневматическим клапаном, вход модуля спутниковой навигационной системы соединен с антенной спутниковой навигационной системы, а соответствующий выход соединен с модулем электронной карты, выход которой соединен с модулем радиоканала, входы/выходы которого соединены с радиомодемом, подключенным к дуплексному фильтру, соединенному с радиоантенной, входы блока внешних соединений соединены с датчиками пути и скорости, выходы которого соединены с соответствующими входами модуля коммутации и подключения, выходы которого подключены к входам двухканального модуля измерителя параметров движения, а двухканальный модуль внешнего устройства соединен с приемными катушками АЛСН и АЛС-ЕН, блок индикации локомотивный выполнен с возможностью подготовки и индикации информации, взаимодействия с машинистом посредством рукояток бдительности, ввода и отображения локомотивных и поездных характеристик, а так же отображения сигналов светофоров и свободных блок-участков, текущего времени, времени движения по графику, фактической скорости, допустимой скорости, рекомендуемой скорости, целевой скорости, ускорения, режима работы, частоты канала АЛСН или индикатора работы канала АЛС-ЕН, отображения железнодорожных координат, названий впередилежащих объектов следования и расстояния до них, данных с датчиков давления в тормозной магистрали, датчиков давления тормозного цилиндра и датчиков давления уравнительного резервуара, кроме того, технологической информации, необходимой для диагностики системы, индикации режима записи на кассету регистрации и включает в себя подключенные к внутреннему CAN интерфейсу плату управления дисплеем, соединенную с дисплеем TFT, плату управления модулем светофоров, соединенную с модулем индикации светофоров, модуль ввода, входы которого соединены с рукоятками бдительности и клавиатурой, блок коммутации и регистрации выполнен с возможностью обработки данных от локомотивных устройств, данных с датчика давления в тормозной магистрали, датчика давления тормозного цилиндра и датчика давления уравнительного резервуара, выполнения служебного и принудительного торможения, а также для включения питания устройства, и включает в себя подключенное к внутреннему CAN интерфейсу устройство формирования и регистрации, входы которого соединены с устройствами локомотива с аналоговыми выходами, датчиком давления в тормозной магистрали, датчиком давления тормозного цилиндра и датчиком давления уравнительного резервуара, вход/выход подключен к плате управления, соединенной с платой реле, выходы которой соединены с электропневматическим вентилем, песочницей локомотива, с тормозным и отпускным вентилями приставки крана машиниста, и блоком контроля несанкционированного отключения ключа электропневматического клапана, выход которого подключен к электропневматическому клапану, блок регистрации включает в себя подключенный к внутреннему CAN интерфейсу модуль регистрации, соединенный с кассетой регистрации, блок согласования интерфейсов включает в себя подключенный к внутреннему CAN интерфейсу модуль обработки сигналов, вход/выход которого соединен с модулем развязки, входы которого подключены к телемеханической системе контроля бодрствования машиниста, тревожным кнопкам, а входы/выходы к системе автоматического управления торможением, шлюз включает в себя устройство управления, соответствующие входы/выходы которого соединены с преобразователем внутреннего CAN интерфейса, подключенного к внутреннему CAN интерфейсу, также с преобразователем внешнего CAN интерфейса, подключенного к внешнему CAN интерфейсу и с преобразователем интерфейса локомотива, подключенного к интерфейсу локомотива (RU 2007145632, B61L 25/04, 11.12.2007).
Недостатками этого устройства являются:
- использование устройств согласования цифровой информации для передачи данных от подсистем, что увеличивает время обработки информации и снижает точность;
- использование подсистем в отдельных конструктивах, что увеличивает энергопотребление устройства и требует значительной площади для установки блоков;
- отсутствие использования автономных модулей, которые максимально приближены к объектам контроля и управления, с которыми они взаимодействуют с целью повышения помехоустойчивости изделия;
- отсутствие прицельного торможения, позволяющее производить автоматическую остановку поезда, у заданной точки прицельной остановки, для ликвидации дополнительных подключений локомотива к источнику тяги и, как следствие, экономии энергоресурсов;
- отсутствие возможности получения информации от путевых генераторов системы автоматического торможения поезда (САУТ), для получения информации о маршруте приема и следования по станции, скоростях следования по маршруту и его длине, координате прицельной остановки, о действующих ограничениях скорости и занятости перегона с целью предотвращения проездов запрещающих сигналов;
- использование разнообразных приемных устройств радиосвязи и путевых систем передачи данных, что повышает требования к ЭМС и снижает удобство обслуживания;
- отсутствие использования сигнатурного метода для безусловной остановки подвижной единицы перед светофором с запрещающим показанием и разрешением дальнейшего следования только при получении команды от поездного диспетчера (ДСП/ДНЦ) по поездной радиосвязи с целью предотвращения проездов запрещающих сигналов;
- отсутствие синхронизации данных о географических координатах с использованием Глобальной навигационной спутниковой системы (ГЛОНАСС), принимаемых приемником спутниковой навигации, для использования различных способов получения информации;
- отсутствие возможности обмена данными с локомотивными микропроцессорными устройствами, что приводит к отсутствию однообразия источников информации, к различным значениям параметров, используемых в расчетах, и не возможности реализации алгоритмов существующими локомотивными исполнительными устройствами.
Технический результат изобретения заключается в повышении точности и быстродействия обработки и передачи информации.
Кроме того, изобретение позволяет снизить энергопотребление и расширить функциональные возможности, за счет взаимодействия с путевыми генераторами системы автоматического управления торможением для получения информации о маршруте следования и приеме на станцию, обеспечения прицельного торможения для предотвращения проезда запрещающих сигналов и использования синхронизации данных с помощью спутников глобальной навигационной системы.
Технический результат достигается тем, что в безопасном локомотивном объединенном комплексе, содержащем включенные в закрытую систему реального времени с модульной архитектурой и соединенные между собой внутренним CAN интерфейсом системный шкаф, блок индикации локомотивный, блок регистрации, включающий кассету регистрации, блок индикации скорости, второй блок индикации локомотивный, при этом системный шкаф состоит из подключенных к внутреннему CAN интерфейсу двух модулей центральной обработки, модуля спутниковой навигационной системы с электронной картой, модуля радиоканала, модуля вычислителя параметров движения, и шлюза, при этом дополнительные входы/выходы модулей центральной обработки соединены с входами/выходами соответственно первого и второго модулей схемы безопасности, выходы которых через усилители электропневматического клапана соединены с электропневматическим клапаном, вход модуля спутниковой навигационной системы с электронной картой соединен с общей антенной, входы/выходы модуля радиоканала соединены с радиомодемом, который соединен через дуплексный фильтр с радиоантенной, датчики пути и скорости подключены к блоку сопряжения, первый выход которого соединен с внутренним CAN интерфейсом, а второй выход через фильтр соединен с входом модуля вычислителя параметров движения, шлюз через второй фильтр соединен с внешним CAN интерфейсом, блок индикации локомотивный состоит из подключенных к внутреннему CAN интерфейсу модуля светофора, модуля дисплея и модуля ввода информации, соединенного с рукоятками бдительности и клавиатурой, согласно изобретению в системный шкаф введены и подключены к внутреннему CAN интерфейсу вычислитель системы автоматического управления торможением, контроллер телемеханической системы контроля бодрствования машиниста и два приемопередающих модуля соответственно стандарта TETRA и GSM/GSM-R, причем входы приемопередающих модулей подключены к общей антенне, а выходы вычислителя системы автоматического управления торможением соединены с электропневматическим вентилем и дополнительным вентилем электропневматического клапана, к внутреннему CAN интерфейсу подключены приемник АЛС-сигналов и точечного канала, соединенный с приемными катушками рельсовых сигналов, и приемник телемеханической системы контроля бодрствования машиниста, который по каналу связи соединен с носимым модулем телемеханической системы контроля бодрствования машиниста, а с внешним CAN интерфейсом соединены микропроцессорная система управления локомотивом и информационный выход тормозного оборудования локомотива.
На чертеже представлена схема безопасного локомотивного объединенного комплекса.
Безопасный локомотивный объединенный комплекс содержит включенные в закрытую систему реального времени с модульной архитектурой и соединенные между собой внутренним CAN интерфейсом 1 системный шкаф 2, блок 3 индикации локомотивный, блок 4 регистрации, включающий кассету 5 регистрации, блок 6 индикации скорости, второй блок 7 индикации локомотивный, при этом системный шкаф 2 состоит из подключенных к внутреннему CAN интерфейсу 1 двух модулей 8, 9 центральной обработки, модуля 10 спутниковой навигационной системы с электронной картой, модуля 11 радиоканала, модуля 12 вычислителя параметров движения, и шлюза 13, при этом дополнительные входы/выходы модулей 8, 9 центральной обработки соединены с входами/выходами соответственно первого и второго модулей 14, 15 схемы безопасности, выходы которых через усилители 16, 17 электропневматического клапана соединены с электропневматическим клапаном 18, вход модуля 10 спутниковой навигационной системы с электронной картой соединен с общей антенной 19, входы/выходы модуля радиоканала 11 соединены с радиомодемом 20, который соединен через дуплексный фильтр 21 с радиоантенной 22, датчики 24, 25 пути и скорости подключены к блоку 26 сопряжения, первый выход которого соединен с внутренним CAN интерфейсом 1, а второй выход через фильтр 23 соединен с входом модуля 12 вычислителя параметров движения, шлюз 13 через второй фильтр 27 соединен с внешним CAN интерфейсом 28, блок 3 индикации локомотивный состоит из подключенных к внутреннему CAN интерфейсу 1 модуля 29 светофора, модуля 30 дисплея и модуля 31 ввода информации, соединенного с рукоятками 32, 33, 34 бдительности и клавиатурой (на чертеже не показано), в системный шкаф 2 введены и подключены к внутреннему CAN интерфейсу 1 вычислитель 35 системы автоматического управления торможением, контроллер 36 телемеханической системы контроля бодрствования машиниста и два приемопередающих модуля 37 и 38 соответственно стандарта TETRA и GSM/GSM-R, обеспечивающие двухсторонний обмен информацией и командами между стационарным (диспетчерским) пунктом и подвижным составом по цифровому радиоканалу, входы приемопередающих модулей 37 и 38 подключены к общей антенне 19, а выход вычислителя 35 системы автоматического управления торможением соединен с электропневматическим вентилем 47 и дополнительным вентилем 46 электропневматического клапана 18, к внутреннему CAN интерфейсу 1 подключены приемник 39 АЛС-сигналов и точечного канала, соединенный с приемными катушками 40, 41 рельсовых сигналов, и приемник 42 телемеханической системы контроля бодрствования машиниста, который по каналу связи соединен с носимым модулем 43 телемеханической системы контроля бодрствования машиниста, а с внешним CAN интерфейсом соединены микропроцессорная система 44 управления локомотивом и информационный выход тормозного оборудования 45 локомотива.
Модуль центральной обработки (8 или 9) производит контроль работоспособности на основании данных полученных от других модулей по CAN интерфейсу, контролирует их работоспособность. На основании этих данных, данных, хранящихся в его энергонезависимой памяти, и данных от модуля схемы безопасности, формирует окончательные значения допустимой и целевой скоростей движения, о режиме работы устройства, о необходимости проведения периодического или однократного контроля бдительности, с учетом физиологического состояния машиниста. Кроме того, формирует данные для управления срывным вентилем электропневматического клапана, дополнительным вентилем и электропневматическим вентилем, формирует информацию для комплекса тормозного оборудования локомотива о служебном торможении и данные для микропроцессорной системы управления локомотива, а так же данные для их сравнения в модуле схемы безопасности.
Модуль схемы безопасности производит аппаратное сравнение данных, полученных от модуля центральной обработки по двум каналам и в случае их соответствия выдает сигнал на усилитель электропневматического клапана о необходимости подачи напряжения питания срывного вентиля электропневматического клапана 18, а в случае их рассогласования формирует сигнал перезапуска модуля центральной обработки и сигнал, передаваемый в усилитель электропневматического клапана о необходимости снятия напряжения со срывного вентиля.
Дублирующая схема, содержащая модули 9, 15 и усилитель 17, выполняет функции основной схемы (модули 8, 14 и усилитель 16) в случае перезапуска модуля 8 основной схемы.
Модуль 10 спутниковой навигационной системы с электронной картой принимает и обрабатывает данные с использованием Глобальной навигационной спутниковой системы (ГЛОНАСС), совместно с уже используемой Global Positioning System (GPS) от общей антенны TETRA/GSM /GSM-R/CHC, на основании получаемых данных о текущих значениях времени, скорости и географических координат и данных электронной карты, хранящихся в энергонезависимой памяти модуля, производит вычисление железнодорожной координаты локомотива и определение других параметров движения (допустимой и целевой скоростей), типа и названия впереди лежащего по ходу движения поезда железнодорожного объекта, расстояния до него, расчетного времени по графику движения.
Модуль 11 радиоканала передает на станцию данные о поезде и параметры движения, принимает от станции команды на ограничение скорости движения, команды на включение служебного или экстренного торможения, команду разрешение проезда запрещающего сигнал светофора с использованием сигнатурного метода, декодирует принятую информацию и обеспечивает ее хранение до следующего сеанса связи, а также организует обмен информацией в режиме интервального регулирования.
Модуль 12 вычислителя параметров движения определяет ускорение и фактическую скорость движения поезда по данным от колесных датчиков пути и скорости ДПС, а так же хранит данные о поездных характеристиках в энергонезависимой памяти.
Шлюз 13 предназначен для согласования взаимодействия безопасного локомотивного объединенного комплекса с микропроцессорными системами управления локомотивом в части получения информации о локомотивных сигналах управления, состояния тревожных кнопок и передачу команд на отключение тяги, комплексом тормозного оборудования локомотива в части получения информации о показаниях датчиков давления, данные о положениях ручки крана машиниста и передачу команд управления торможением.
Вычислитель 35 системы автоматического управления торможением предназначен для расчета программных скоростей для прицельного торможения с учетом профиля, коэффициента сцепления, определения расстояния до светофора из расчета длин 2-х блок-участков, выдачи команд на разбор тяги и торможение дополнительным вентиля КОН, электропневматическим вентилем, контроль скорости с учетом текущих ограничений.
Контролер 36 телемеханической системы контроля бодрствования машиниста предназначен для обработки информации о физиологических параметрах машиниста, действиях машиниста по управлению подвижным составом, формирование в общесистемный CAN-интерфейс информации о необходимости дополнительной проверки работоспособности машиниста путем нажатия на специальную рукоятку бдительности, формирование в общесистемный CAN-интерфейс информации о работоспособности машиниста.
Блок 3 индикации локомотивный предназначен для подготовки и индикации информации, взаимодействия с машинистом посредством рукояток бдительности РБ, специальной РБС и помощника РБП, для ввода и отображения локомотивных и поездных характеристик, а так же отображения сигналов светофоров, текущего времени, времени движения по графику, фактической скорости, допустимой скорости, рекомендуемой скорости, целевой скорости, ускорения, режима работы (поездной, маневровый, двойной тяги), частоты канала АЛСН или индикатора работы канала АЛС-ЕН, отображения железнодорожных координат, названий впередилежащих объектов следования и расстояния до них, данных с датчиков давления в тормозной магистрали ДД ТМ, тормозном цилиндре ДЦ ТЦ и уравнительном резервуаре ДЦ УР, индикации режима записи на кассету регистрации, индикации предварительной световой сигнализации, индикации проверки бдительности, активности радиоканала телемеханической системы контроля бодрствования машиниста, кроме того, на отдельную вкладку выносится технологическая информация, необходимая для диагностики системы.
Второй блок 7 индикации локомотивный предназначен для помощника машиниста и осуществляет отображение сигналов светофоров.
Блок 4 регистрации предназначен для приема сообщений с внутреннего CAN интерфейса и их записи на кассету регистрации.
Блок 6 индикации скорости предназначен для индикации допустимой и фактической скоростей.
Блок 26 сопряжения предназначен для приема данных от датчиков пути и скорости, контроля работоспособности датчиков, первоначальной обработки сигналов с гальванической развязкой от бортовой сети, вычисление и формирование в CAN-интерфейс вектора фактической скорости.
Приемник 39 АЛС-сигналов и точечного канала предназначен для приема непрерывных рельсовых каналов АЛСН, АЛС-ЕН, формирования информации о текущем показании АЛСН и приема сигналов точечных каналов САУТ.
Приемник 42 телемеханической системы контроля бодрствования машиниста предназначен для приема данных по радиоканалу о физиологических параметрах машиниста и передачи информации по внутреннему интерфейсу.
Носимый модуль телемеханической системы контроля бодрствования машиниста предназначен для сбора данных о физиологических параметрах машиниста, с помощью датчика, находящегося на его руке, и передачи данных по радиоканалу.
Приемная катушка рельсовых сигналов предназначена для работы в двух диапазонах частот. Первый диапазон частот (НЧ) - сигналы рельсовых цепей АЛСН и второй диапазон частот (ВЧ) - сигналы путевых устройств САУТ.
Общая (комбинированная антенна) антенна 19 предназначена для работы на подвижных объектах железнодорожного транспорта в дециметровом диапазоне волн, совместно с локомотивными радиостанциями стандартов TETRA, GSM-R, GSM900, а также в составе систем определения местоположения подвижного состава на базе стандартов GPS/ГЛОНАСС.
Безопасный локомотивный объединенный комплекс работает следующим образом.
Перед началом движения машинист устанавливает в кассетоприемник блока 4 регистрации кассету 5 регистрации, включает ключ (на чертеже не показан) электропневматического клапана 18. Далее с помощью клавиатуры модуля 31 ввода информации блока 3 вводит следующие параметры: номер машиниста, номер поезда, длину и массу поезда, направление движения, номер пути, признак правильности пути, устанавливает режим работы (поездной, маневровый, двойной тяги), и в случае, если движение будет происходить не по электронной карте, то вводит начальную координату. Данные с модуля 31 ввода информации обрабатываются и записываются в модуль 12 вычислителя параметров движения. Включает носимый модуль 43 телемеханической системы контроля бодрствования машиниста.
После включения устройства модули 8, 9 центральной обработки проводят опрос всех модулей комплекса, подключенных к внутреннему CAN интерфейсу 1, для принятия решения о работоспособности модулей, полученные данные записываются в кассете 5 регистрации. В случае отказа модуля, влияющего на безопасность движения, снимается управляющее напряжение с электропневматического клапана 18, тем самым обеспечивается невозможность движения локомотива.
Информация о значении параметров от информационного выхода тормозного оборудования 45 локомотива, через второй фильтр 27 поступает в шлюз 13 для преобразования и дальнейшей передачи на блок 3 для отображения в модуле 30 дисплея, в блок 4 регистрации для записи в кассету 5 регистрации, в модули 8, 9 центральной обработки и в вычислитель 35 системы автоматического управления торможением для реализации заданных режимов работы:
- выполнения принудительного автостопного торможения;
- выполнения прицельного служебного торможения;
- защиты от несанкционированного отключения ключа электропневматического клапана.
Сигналы АЛСН и АЛС-ЕН из рельсовой цепи через приемные катушки 40, 41 рельсовых сигналов поступают в модуль приема сигналов АЛС (на чертеже не показано) приемника 39, где осуществляется их дешифрация, формируются показания локомотивного светофора, определяется количество свободных блок-участков впереди по ходу движения поезда, целевая скорость, с которой локомотив должен проследовать границу текущего блок-участка, предельно допустимая скорость движения поезда на данном блок-участке. Из модуля приема сигналов АЛС приемника 39 данные передаются для индикации в модуль 30 дисплея блока 3, в блок 4 регистрации для записи в кассету 5 регистрации, в вычислитель 35 системы автоматического управления торможением и в модули 8, 9 центральной обработки для принятия окончательного решения о допустимой и целевой скоростях движения на данном блок-участке.
Сигналы путевых генераторов через приемные катушки 40, 41 рельсовых сигналов поступают в приемник точечного канала (на чертеже не показано) приемника 39, где осуществляется их обработка и передача в вычислитель 35 системы автоматического управления торможением для расчета длин блок-участков, допустимой скорости движения на данном блок-участке, расчета данных для прицельного торможения.
Сигналы от датчиков 24, 25 пути и скорости поступают в блок 26 сопряжения, где происходит их дальнейшее преобразование, гальванически развязанные сигналы поступают в модуль 12 вычислителя параметров движения и в вычислитель 35 системы автоматического управления торможением, где из них формируются значения фактической скорости поезда, ускорения и пройденного пути. Эти данные отображаются в модуле 30 дисплея, записываются на кассету 5 регистрации и поступают в модули 8, 9 центральной обработки системного шкафа 2 для сравнения с допустимой скоростью и принятия решения об экстренном торможении или служебном торможении. При принятии решения о "боксовании" решение об экстренном торможении не принимается и формируется команда "боксование", которая записывается на кассету 5 регистрации блока 4 регистрации.
На основании принятых данных от Глобальной навигационной спутниковой системы (ГЛОНАСС) и Global Positioning System (GPS) через общую антенну 19, и данных электронной карты, записанной в модуле 10, определяются местоположение поезда, расстояние до впереди лежащего объекта и ограничение скорости проследования данного объекта. Эти данные отображаются в модуле 30 дисплея и передаются в модули 8, 9 центральной обработки для принятия окончательного решения о допустимой и целевой скоростей движения на данном блок-участке.
Сигналы от радиоантенны 22 (160 МГц) через дуплексный фильтр 21 и радиомодем 20 поступают в модуль 11 радиоканала, где из них формируются данные об ограничениях движения на текущем участке пути, которые передаются в модули 8 и 9 центральной обработки для принятия окончательного решения о допустимой и целевой скорости движения на данном блок-участке. От базовой станции на модуль 11 по радиоканалу может поступать команда на разрешение проезда запрещающего сигнала светофора с использованием сигнатурного метода и команда о проведении служебного или принудительного торможения. От модуля 11 на базовую станцию поступают данные о параметрах движения поезда (номер пути, номер поезда, число вагонов, координата поезда, значения допустимой, целевой и фактической скоростей). Кроме того, применение дуплексного фильтра 21 обеспечивает использование одной приемо-передающей антенны 160 МГц (радиоантенны 22) для работы описываемого безопасного локомотивного объединенного комплекса и поездной радиостанции локомотива.
Два приемопередающих модуля 37 и 38 соответственно стандарта ТЕТRА и GSM/GSM-R, в зависимости от наличия вещания в этих диапазонах через общую антенну 19 обеспечивают дуплексную передачу данных для дополнительных технологических приложений (АСУ, диагностика и т.д.), информацию о номере, длине, местоположении, скорости следования поезда, а также информации об исправности системы безопасности и об общем пробеге локомотива в региональный диспетчерский центр, осуществляющий контроль местоположения и технического состояния подвижного состава.
Модули 8, 9 центральной обработки принимают от модуля приема сигналов АЛС приемника 39, модуля 10 спутниковой навигационной системы, модуля 11 радиоканала, вычислителя 35 системы автоматического управления торможением данные о значениях допустимой и целевой скоростей на текущем блок-участке, и формируют окончательное решение о значениях данных скоростей, а также на основании данных, хранящихся в их энергонезависимой памяти, модули 8, 9 центральной обработки формируют кривую снижения значений скоростей для различных категорий поездов (скоростной, пассажирский, грузовой) при подъезде к запрещающему сигналу светофора, а так же при подъезде к железнодорожному объекту (платформа, станция, стрелка, переезд и т.д.).
Модули 8, 9 центральной обработки на основании данных о значении фактической скорости, полученной с модуля 12 вычислителя параметров движения, и данных о значении давлений, полученных от информационного выхода тормозного оборудования 45 локомотива, через шлюз 13 формируют в зависимости от поездной ситуации команду экстренного или служебного торможения в случаях превышения допустимой скорости, проезда запрещающего сигнала светофора или выключения ключа электропневматического клапана.
Модули 8, 9 центральной обработки принимают решение о разрешении проезда запрещающего сигнала светофора с использованием сигнатурного метода по команде, полученной от модуля 11 радиоканала с базовой станции.
Модули 8, 9 центральной обработки формируют для приемопередающих модулей 37 и 38 данные для дополнительных технологических приложений (АСУ, диагностика и т.д.), информацию о номере, длине, местоположении, скорости следования поезда, а также информации об исправности системы безопасности и об общем пробеге локомотива.
Вычислитель 35 системы автоматического управления торможением рассчитывает и производит контроль прицельного торможения на основании данных, поступающих с точечного канала приемника 39, модулей 8, 9 центральной обработки, от информационного выхода тормозного оборудования 45 локомотива, датчиков 24, 25 пути и скорости, принимает решение о применении прицельного торможения и выдает команду через шлюз 13 и фильтр 27 на комплекс тормозного оборудования 45 локомотива о включении режима торможения или отпуска тормоза в зависимости от поездной ситуации, а так же сигнал разбора тяги через шлюз - CAN 40 и фильтр 27 на микропроцессорную систему 44 управления локомотивом.
При получении от базовой станции по радиоканалу команды о принудительном торможении, поступающей на модули 8, 9 с модуля 11 радиоканала, модули 8, 9 формируют команду на выполнение принудительного торможения и передают ее в вычислитель 35 системы автоматического управления торможением, который с помощью соответствующих реле производит включение электропневматического вентиля 36.
Шлюз 13, через фильтр 27, получает информацию от микропроцессорной системы 44 управления локомотивом, данные о состоянии локомотивных устройств (контроллер машиниста, компрессор, тифон, свисток, цепи включения электропневматического торможения, тревожная кнопка, и т.д.), проводит их цифровую обработку и передает их по внутреннему CAN интерфейсу для записи в кассету 5 регистрации, и модули 8, 9.
При получении команды от модулей 8, 9 о несанкционированном отключении ключа электропневматического клапана 18, вычислитель 35 системы автоматического управления торможением формирует команду на включение дополнительного вентиля 46 электропневматического клапана 18, при получении которой в нем срабатывает клапан, производя экстренную разрядку тормозной магистрали и остановку поезда.
Блок 6 индикации скорости принимает данные о допустимой и фактической скорости с модулей 8, 9, модуля 12 вычислителя параметров движения для индикации.
Второй блок 7 индикации локомотивный принимает данные о сигналах светофоров с приемника 39 АЛС-сигналов для их индикации помощнику машиниста.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕЗОПАСНЫЙ ЛОКОМОТИВНЫЙ ОБЪЕДИНЕННЫЙ КОМПЛЕКС | 2011 |
|
RU2475396C1 |
| КОМПЛЕКСНОЕ ЛОКОМОТИВНОЕ УСТРОЙСТВО БЕЗОПАСНОСТИ | 2007 |
|
RU2420418C2 |
| ЛОКОМОТИВНАЯ СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДОВ | 2013 |
|
RU2554912C2 |
| Устройство для управления движением поезда | 2021 |
|
RU2765515C1 |
| ТРЕНАЖЕР ДЛЯ ПРОФЕССИОНАЛЬНОЙ ПОДГОТОВКИ МАШИНИСТОВ ЛОКОМОТИВОВ И ОБСЛУЖИВАЮЩЕГО ПЕРСОНАЛА | 2015 |
|
RU2596042C1 |
| Способ интервального регулирования движения поездов с использованием подвижных координатных отрезков на участках без путевых светофоров | 2024 |
|
RU2828493C1 |
| КОМПЛЕКСНОЕ УСТРОЙСТВО КОНТРОЛЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДА | 2011 |
|
RU2475397C1 |
| Устройство бортовой аппаратуры автоматической локомотивной сигнализации | 2017 |
|
RU2653667C1 |
| КОМПЛЕКСНОЕ ЛОКОМОТИВНОЕ УСТРОЙСТВО БЕЗОПАСНОСТИ УНИФИЦИРОВАННОЕ (КЛУБ-У) | 2003 |
|
RU2248899C1 |
| УСТРОЙСТВО БЕЗОПАСНОСТИ КОМПЛЕКСНОЕ ЛОКОМОТИВНОЕ С АВТОНОМНЫМИ МОДУЛЯМИ | 2009 |
|
RU2398698C1 |
Изобретение относится к области железнодорожной автоматики, телемеханики и связи. Безопасный локомотивный объединенный комплекс содержит соединенные между собой внутренним CAN интерфейсом системный шкаф, блок индикации локомотивный, блок регистрации, блок индикации скорости, второй блок индикации локомотивный. Системный шкаф состоит из подключенных к внутреннему CAN интерфейсу двух модулей центральной обработки, модуля спутниковой навигационной системы, модуля радиоканала, модуля вычислителя параметров движения, и шлюза. В системный шкаф введены и подключены к внутреннему CAN интерфейсу вычислитель системы автоматического управления торможением, контроллер системы контроля бодрствования машиниста и два приемопередающих модуля соответственно стандарта TETRA и GSM/GSM-R. Входы приемопередающих модулей подключены к общей антенне. Также в системе имеется электропневматический вентиль и дополнительный вентиль электропневматического клапана. К внутреннему CAN интерфейсу подключены приемник АЛС-сигналов и приемник системы контроля бодрствования машиниста. С внешним CAN интерфейсом соединены микропроцессорная система управления локомотивом и информационный выход тормозного оборудования локомотива. Решение направлено на повышение точности и быстродействия обработки и передачи информации. 1 ил.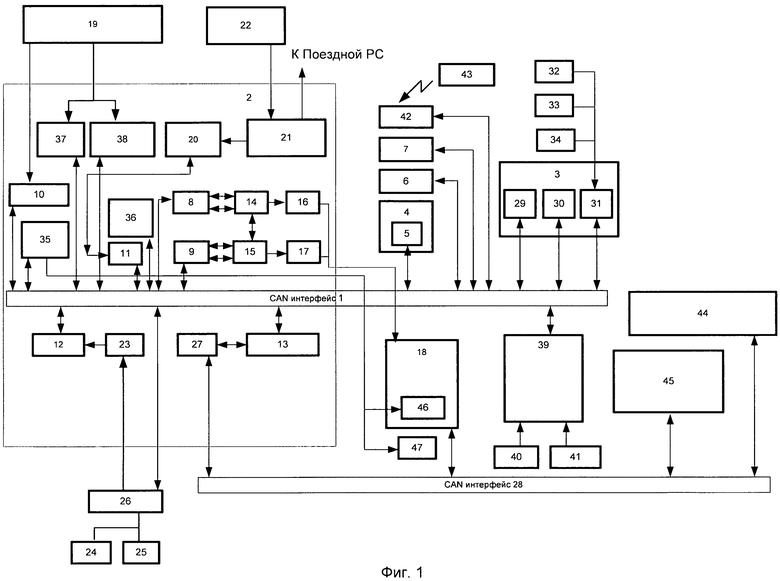
Безопасный локомотивный объединенный комплекс, содержащий включенные в закрытую систему реального времени с модульной архитектурой и соединенные между собой внутренним CAN интерфейсом системный шкаф, блок индикации локомотивный, блок регистрации, включающий кассету регистрации, блок индикации скорости, второй блок индикации локомотивный, при этом системный шкаф состоит из подключенных к внутреннему CAN интерфейсу двух модулей центральной обработки, модуля спутниковой навигационной системы с электронной картой, модуля радиоканала, модуля вычислителя параметров движения, и шлюза, при этом дополнительные входы/выходы модулей центральной обработки соединены с входами/ выходами соответственно первого и второго модулей схемы безопасности, выходы которых через усилители электропневматического клапана соединены с электропневматическим клапаном, вход модуля спутниковой навигационной системы с электронной картой соединен с общей антенной, входы/выходы модуля радиоканала соединены с радиомодемом, который соединен через дуплексный фильтр с радиоантенной, датчики пути и скорости подключены к блоку сопряжения, первый выход которого соединен с внутренним CAN интерфейсом, а второй выход через фильтр соединен с входом модуля вычислителя параметров движения, шлюз через второй фильтр соединен с внешним CAN интерфейсом, блок индикации локомотивный состоит из подключенных к внутреннему CAN интерфейсу модуля светофора, модуля дисплея и модуля ввода информации, соединенного с рукоятками бдительности и клавиатурой, отличающийся тем, что в системный шкаф введены и подключены к внутреннему CAN интерфейсу вычислитель системы автоматического управления торможением, контроллер телемеханической системы контроля бодрствования машиниста и два приемопередающих модуля соответственно стандарта TETRA и GSM/GSM-R, причем входы приемопередающих модулей подключены к общей антенне, а выход вычислителя системы автоматического управления торможением соединены с электропневматическим вентилем и дополнительным вентилем электропневматического клапана, к внутреннему CAN интерфейсу подключены приемник АЛС-сигналов и точечного канала, соединенный с приемными катушками рельсовых сигналов, и приемник телемеханической системы контроля бодрствования машиниста, который по каналу связи соединен с носимым модулем телемеханической системы контроля бодрствования машиниста, а с внешним CAN интерфейсом соединены микропроцессорная система управления локомотивом и информационный выход тормозного оборудования локомотива.
| RU 2007145632 А, 20.06.2009 | |||
| НИКИФОРОВ Б | |||
| СТАТЬЯ «ЭЛЕКТРОНИКА НА СЛУЖБЕ БЕЗОПАСНОСТИ ДВИЖЕНИЯ» | |||
| - СОВРЕМЕННЫЕ ТЕХНОЛОГИИ АВТОМАТИЗАЦИИ, №1, 2006, с.40-43 | |||
| СТАТЬЯ «О ПОВЫШЕНИИ ВЛИЯНИЯ СРЕДСТВ ЖАТ НА ЭФФЕКТИВНОСТЬ РАБОТЫ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА» [ОН-ЛАЙН], 31.12.2010 | |||
| ИЗОРИН В | |||
| И ДР | |||
| УНИФИЦИРОВАННОЕ КОМПЛЕКСНОЕ ЛОКОМОТИВНОЕ |

