Настоящее изобретение относится к области измерительной техники и предназначено для измерения угловых или линейных перемещений по двум пространственным координатам и угла скручивания.
Известны устройства для измерения угловых и (или) линейных перемещений по двум координатам и угла скручивания (а.с. СССР №1146547, G01B 11/26, 23.03.1985; а.с. СССР №1435936, G01B 11/26, 07.11.1988; а.с. СССР №1566206, G01B 11/26, 23.05.1990).
Недостатком способов, реализованных в этих устройствах, является необходимость применения сложных оптических систем, что ведет к увеличению габаритов, веса и стоимости устройств.
Наиболее близким по технической сущности к предлагаемому изобретению является устройство для измерения угловых отклонений объекта по авторскому свидетельству СССР №1211601, G01B 11/26, 15.02.1986, позволяющее измерять две угловые координаты и угол скручивания.
Способ, используемый в устройстве, заключается в том, что формируют два световых потока от светящихся марок, установленных в фокальной плоскости объектива коллиматора передающей оптической системы, формируют на квадрантном фотоприемнике при помощи двух коллиматоров приемной оптической системы изображения светящихся марок и по смещению изображений марок судят об взаимных угловых отклонениях передающей и приемной оптических систем.
Недостатком такого способа является необходимость использования трех объективов для реализации функции измерения, что увеличивает габариты и усложняет устройство.
Техническим результатом, на которое направлено данное изобретение, является разработка такого способа, который позволяет упростить устройство при сохранении возможности измерения двух угловых или линейных перемещений и угла скручивания.
Данная задача решается способом, заключающимся в формировании на поверхности квадрантного фотоприемника двух световых потоков, преобразовании оптических сигналов в электрические и определении координат оптических сигналов по электрическим, отличающимся тем, что формируют два дополнительных световых потока, световые потоки модулируют ортогональными функциями, потоки формируют на границах раздела смежных квадрантов фотоприемника, выделяют электрические сигналы от каждого светового потока с каждого квадранта, формируют из выделенных сигналов разностные сигналы, пропорциональные разности электрических сигналов от каждого светового потока от каждой пары смежных квадрантов, по разности разностных сигналов каждой пары противоположных смежных квадрантов судят о перемещении, а по сумме всех разностных сигналов судят об угле скручивания.
С целью повышения точности измерения путем стабилизации мощностей потоков формируют опорный электрический сигнал, равный требуемой величине электрического сигнала от каждого светового потока, сигналы, пропорциональные сумме электрических сигналов каждого светового потока от каждой пары смежных квадрантов, сравнивают с опорным сигналом и по результатам сравнения регулируют мощность световых потоков до достижения равенства суммарных сигналов опорному.
Вариантом решения задачи является способ, заключающийся в формировании на поверхности квадрантного фотоприемника двух световых потоков, преобразовании оптических сигналов в электрические и определении координат оптических сигналов по электрическим, отличающийся тем, что формируют два дополнительных световых потока, световые потоки модулируют ортогональными функциями, потоки формируют на границах раздела смежных квадрантов фотоприемника, формируют разностные сигналы, пропорциональные разности электрических сигналов от каждой пары смежных квадрантов, выделяют сигналы от каждого светового потока из разностных сигналов, по разности выделенных сигналов от каждой пары противоположных смежных квадрантов судят о перемещении, а по сумме всех выделенных сигналов судят об угле скручивания.
Техническим результатом, обеспечиваемым приведенной совокупностью признаков, является упрощение способа и устройства и повышение точности измерения.
Сущность способа поясняется фиг. 1-2.
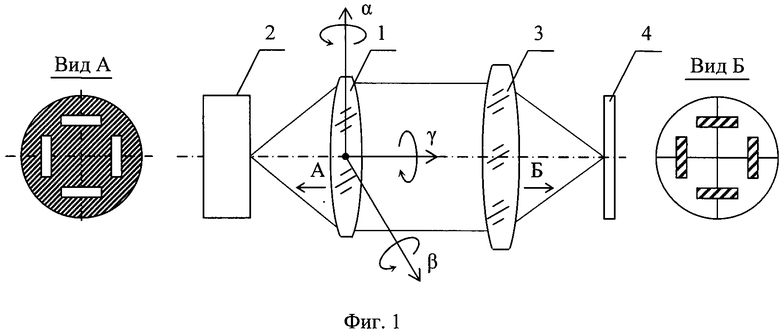
На фиг. 1 изображена оптическая схема измерительной структуры.
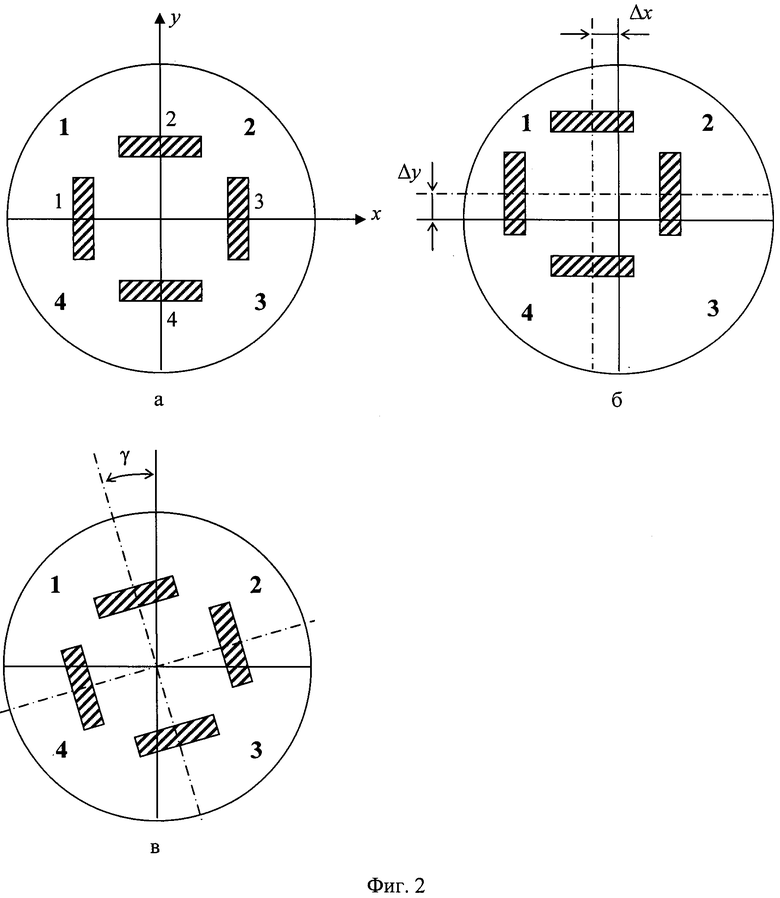
На фиг. 2 показаны проекции световых потоков от марок на чувствительной поверхности квадрантного фотоприемника при различных значениях угловых перемещений.
Передающая оптическая система, содержащая коллиматор 1 (фиг. 1), в фокальной плоскости которого установлен блок светящихся марок 2, формирующий четыре световых потока. Возможная форма и размещение марок показаны на виде А (фиг. 1). Световые потоки поступают на приемную оптическую систему, содержащую коллиматор 3, в фокальной плоскости которого установлен квадрантный фотоприемник 4. Изображения марок на фотоприемнике показаны на виде Б (фиг. 1). Изображения марок и квадранты фотоприемника условно пронумерованы, как показано на фиг. 2а, где также показана система координат фотоприемника x, y. Световые потоки формируют на поверхности фотоприемника на границах раздела квадрантов. Фотоприемник преобразует оптические сигналы каждого светового потока в электрические сигналы s11, s12, s22, s23, s33, s34, s44, s41. Здесь первый индекс при s относится к номеру светового потока, а второй к номеру квадранта фотоприемника (например, s23 - сигнал от второго светового потока с третьего квадранта). Каждый квадрант фотоприемника преобразует сигналы от двух световых потоков, поэтому электрический сигнал с квадранта состоит из суммы сигналов от двух световых потоков. Для выделения из этой суммы сигнала соответствующего светового потока световые потоки модулируют ортогональными функциями. Возможность выделения определенного сигнала из суммы ортогонально модулированных сигналов основана на свойствах ортогональных функций.
Если имеется множество ортогональных функций, например, φ1(t), φ2(t), φ3(t), φ4(t), то

где (0, Т) - интервал ортогональности;
с - константа (при c=1 множество называется ортонормированным).
Поэтому, например,

На основе этого выражения строится ортогональный фильтр для выделения из суммы ортогональных сигналов определенного сигнала. Фильтр содержит перемножитель суммы сигналов на выделяемый сигнал и интегратор.
Существует множество типов ортогональных функций, таких, например, как гармонические функции кратных частот, функции Уолша и т.п. Частным (и простейшим) случаем ортогональных функций является периодическая последовательность групп импульсов, не совпадающих по времени на интервале ортогональности (периоде).
Таким образом, появляется возможность выделения из сигналов каждого квадранта сигналов от соответствующего светового потока s11, s12, s22, s23, s33, s34, s44, s41.
При взаимных отклонениях передающей и приемной оптических систем на углы Δα и Δβ (фиг. 1) изображения марок на фотоприемнике сместятся соответственно по координатам x и y на величины Δx и Δy (фиг. 2б). Величина смещения связана с угловыми отклонениями и фокусным расстоянием f коллиматора 2 соотношениями

В свою очередь, как видно из фиг. 2б, разность сигналов Δs1=s11-s12 и соответственно Δs3=s33-s34 пропорциональна смещению Δx, а разность сигналов Δs2=s22-s23 и соответственно Δs4=s44-s41 пропорциональна смещению Δy.
При взаимном развороте передающей и приемной оптических систем на угол скручивания γ (фиг. 1) изображения марок на фотоприемнике развернутся также на угол γ (фиг. 2в). Изображения марок на фотоприемнике сместятся, при этом, как видно из фигуры, разность сигналов Δs1=s11-s12, Δs2=s22-s23, Δs3=s33-s34, Δs4=s44-s41 будет пропорциональна величине смещения за счет разворота на угол γ.
Поскольку эти разностные сигналы также пропорциональны и линейным смещениям Δx и Δy, то для того, чтобы отличить сигналы за счет линейных смещений от сигналов за счет скручивания, результирующие сигналы Δsx и Δsy, пропорциональные линейным смещениям Δx и Δy, формируют как разность сигналов разности попарно противоположных квадрантов фотоприемника:

При этом, как следует из фиг. 2в, при чистом развороте на угол γ без смещений Δx и Δy, сигналы s11=s33, s12=s34, s22=s44, s23=s41 и в соответствии с (3) результирующие сигналы Δsx=Δsy=0.
По результатам измерения Δsx и Δsy с помощью (2) определяют угловые перемещения Δα и Δβ.
Результирующий сигнал Δsg, пропорциональный углу скручивания γ, формируют как сумму всех разностных сигналов:
Δsg=Δs1+Δs2+Δs3+Δs4=(s11-s12)+(s22-s23)+(s33-s34)+(s44-s41). (4)
Если мощности световых потоков нестабильны, т.е. могут изменяться со временем, то для их стабилизации могут быть сформированы суммарные сигналы от смежных квадрантов, пропорциональные мощности каждого светового потока и не зависящие от перемещений.
ssum1=s11+s12,
ssum2=s22+s23,
ssum3=s33+s34,
ssum4=s44+s41. (5)
Эти сигналы сравнивают с опорным (эталонным) сигналом sref и в случае отличия суммарных сигналов от опорного регулируют мощность соответствующего светового потока до достижения равенства ssum1=ssum2=ssum3=ssum4=sref. Таким образом, достигается стабильность мощностей световых потоков.
Если мощность световых потоков достаточно стабильна, то эту процедуру можно исключить и использовать второй вариант способа. Этот вариант отличается от первого тем, что сигналы с квадрантов фотоприемника сначала вычитают друг из друга, а затем из получившейся смеси сигналов выделяют при помощи ортогонального фильтра сигнал от соответствующего светового потока. Это позволяет сократить количество ортогональных фильтров, но при этом исключается возможность регулирования мощности световых потоков.
Заявляемый способ для измерения перемещений может быть использован в системах следящей отработки рассогласований и в системах точного позиционирования. Кроме угловых перемещений существует возможность измерения линейных перемещений и угла скручивания. При этом систему из двух жестко связанных коллиматоров 1 и 3 (фиг. 1) можно рассматривать как проекционный объектив и перемещать и поворачивать блок марок 2 или фотоприемник 4. В любом из этих случаев будут измеряться линейные перемещения Δx и Δy по сигналам Δsx и Δsy и угол скручивания γ по сигналу Δsg.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ прогнозирования индивидуального риска развития бронхиальной астмы у человека на различные по продолжительности периоды жизни | 2019 |
|
RU2716094C1 |
| Многоэлементный координатный кремниевый фотоприемник | 1988 |
|
SU1648223A2 |
| Устройство для измерений перемещений светового пятна | 1990 |
|
SU1768921A1 |
| СПОСОБ ЭЛЕКТРОЕМКОСТНОЙ ВЛАГОМЕТРИИ ВОДОНЕФТЯНЫХ ЭМУЛЬСИЙ В ПОТОКЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2383885C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОЙ ФОКУСИРОВКИ ЛАЗЕРНОГО ФОТОПОСТРОИТЕЛЯ | 2001 |
|
RU2207637C2 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ГИРОСКОП | 1992 |
|
RU2039934C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ДВИЖУЩЕГОСЯ ОБЪЕКТА | 2018 |
|
RU2686070C1 |
| Фотоэлектрический измеритель перемещений вращающихся деталей | 1982 |
|
SU1224578A1 |
| СПОСОБ И СИСТЕМА ОБРАТНОГО ОПТИЧЕСКОГО ТРЕКИНГА ПОДВИЖНОГО ОБЪЕКТА | 2018 |
|
RU2697942C1 |
| МОРОЗИЛЬНИК С ФУНКЦИЕЙ ОТТАИВАНИЯ И СПОСОБ РАБОТЫ ЭТОГО МОРОЗИЛЬНИКА | 2003 |
|
RU2313742C2 |
Способ измерения перемещений заключается в формировании на поверхности квадрантного фотоприемника двух световых потоков, преобразовании оптических сигналов в электрические и определении координат оптических сигналов по электрическим. При этом формируют два дополнительных световых потока на границах раздела смежных квадрантов фотоприемника и модулируют ортогональными функциями. Выделяют сигналы от каждого светового потока с каждого квадранта. Формируют из выделенных сигналов разностные сигналы, пропорциональные разности электрических сигналов от каждого светового потока от каждой пары смежных квадрантов. По разности разностных сигналов каждой пары противоположных смежных квадрантов судят о перемещении, а по сумме всех разностных сигналов судят об угле скручивания. Технический результат - упрощение способа и повышение точности измерения. 2 н. и 1 з.п. ф-лы, 2 ил.
1. Способ измерения перемещений, заключающийся в формировании на поверхности квадрантного фотоприемника двух световых потоков, преобразовании оптических сигналов в электрические и определении координат оптических сигналов по электрическим, отличающийся тем, что формируют два дополнительных световых потока, световые потоки модулируют ортогональными функциями, потоки формируют на границах раздела смежных квадрантов фотоприемника, выделяют электрические сигналы от каждого светового потока с каждого квадранта, формируют из выделенных сигналов разностные сигналы, пропорциональные разности электрических сигналов от каждого светового потока от каждой пары смежных квадрантов, по разности разностных сигналов каждой пары противоположных смежных квадрантов судят о перемещении, а по сумме всех разностных сигналов судят об угле скручивания.
2. Способ по п. 1, отличающийся тем, что формируют опорный электрический сигнал, равный требуемой величине электрического сигнала от каждого светового потока, сигналы, пропорциональные сумме электрических сигналов каждого светового потока от каждой пары смежных квадрантов, сравнивают с опорным сигналом и по результатам сравнения регулируют мощность световых потоков до достижения равенства суммарных сигналов опорному.
3. Способ измерения перемещений, заключающийся в формировании на поверхности квадрантного фотоприемника двух световых потоков, преобразовании оптических сигналов в электрические и определении координат оптических сигналов по электрическим, отличающийся тем, что формируют два дополнительных световых потока, световые потоки модулируют ортогональными функциями, потоки формируют на границах раздела смежных квадрантов фотоприемника, формируют разностные сигналы, пропорциональные разности электрических сигналов от каждой пары смежных квадрантов, выделяют сигналы от каждого светового потока из разностных сигналов, по разности выделенных сигналов от каждой пары противоположных смежных квадрантов судят о перемещении, а по сумме всех выделенных сигналов судят об угле скручивания.
| Устройство для измерения угловых отклонений объекта | 1984 |
|
SU1211601A1 |
| Способ контроля перемещений | 1987 |
|
SU1490484A1 |
| US 20070253002 A1 01.11.2007 | |||
| US 20120206735 A1 16.08.2012 | |||
| US 20090323163 A1 31.12.2009. | |||

